Switching Characteristics Optimization of Two-Phase Interleaved Bidirectional DC/DC for Electric Vehicles


Abstract
:1. Introduction
2. Modeling and Control of Two-Phase Interleaved Bi-DC/DC
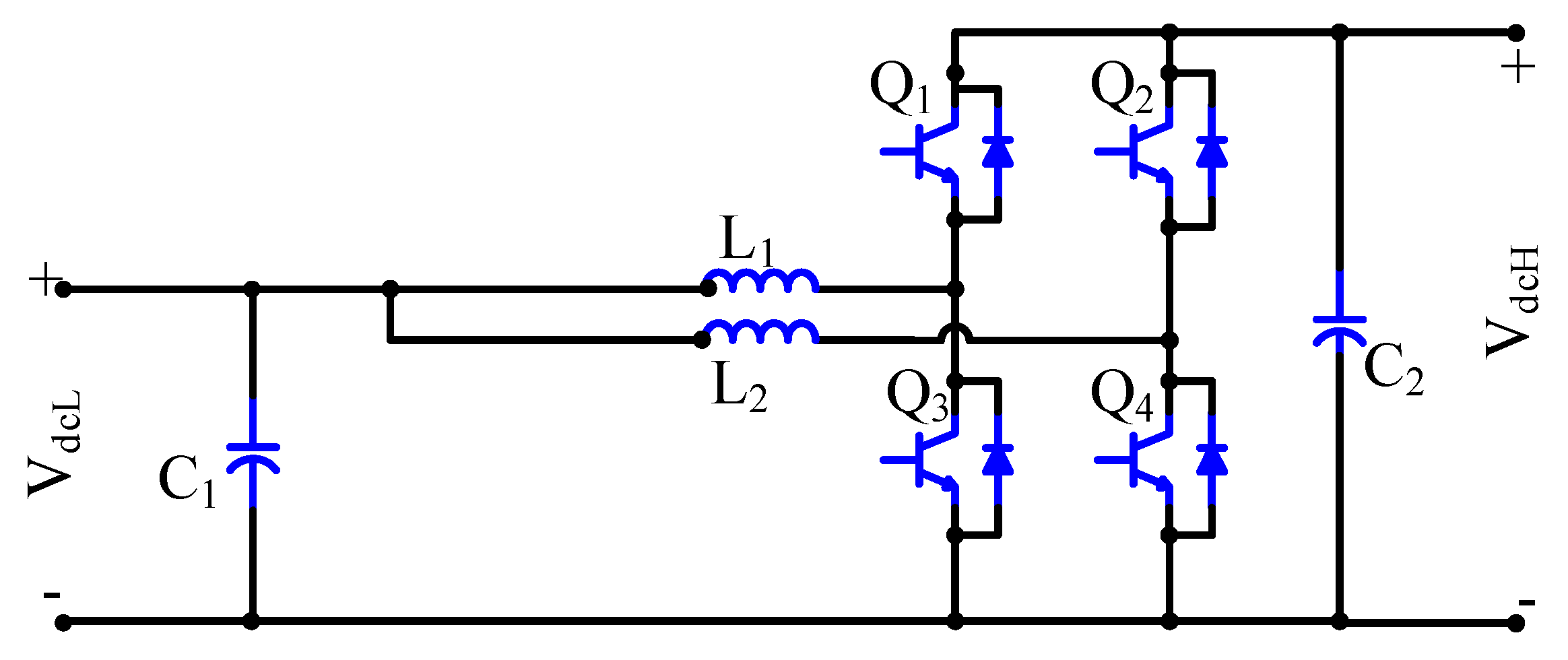
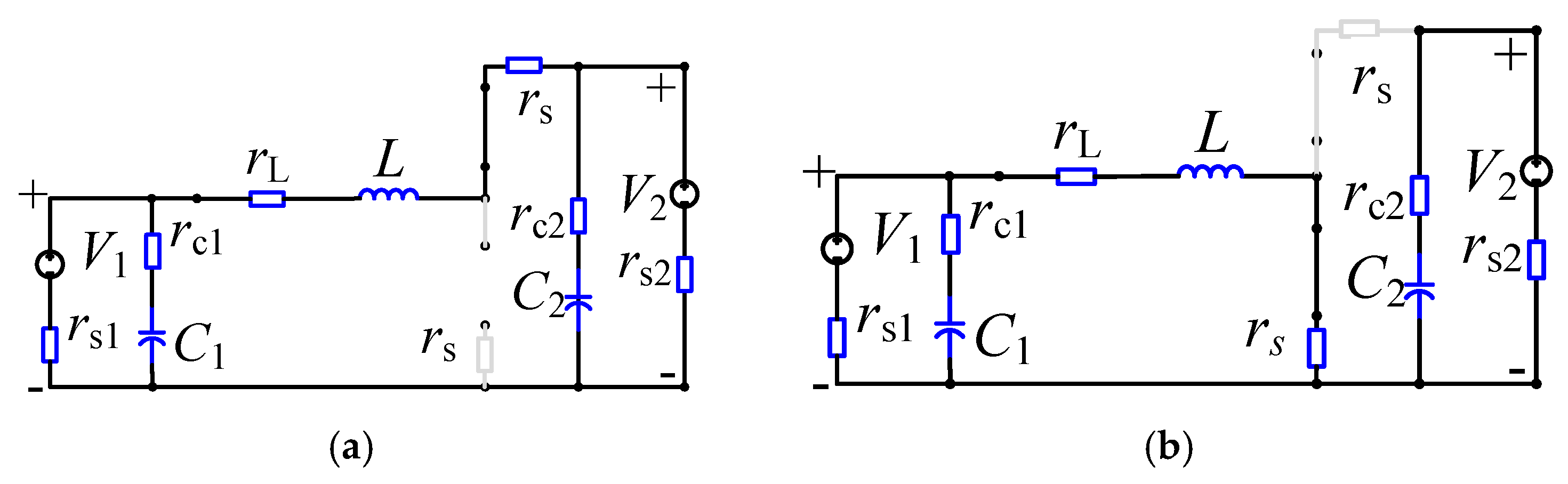
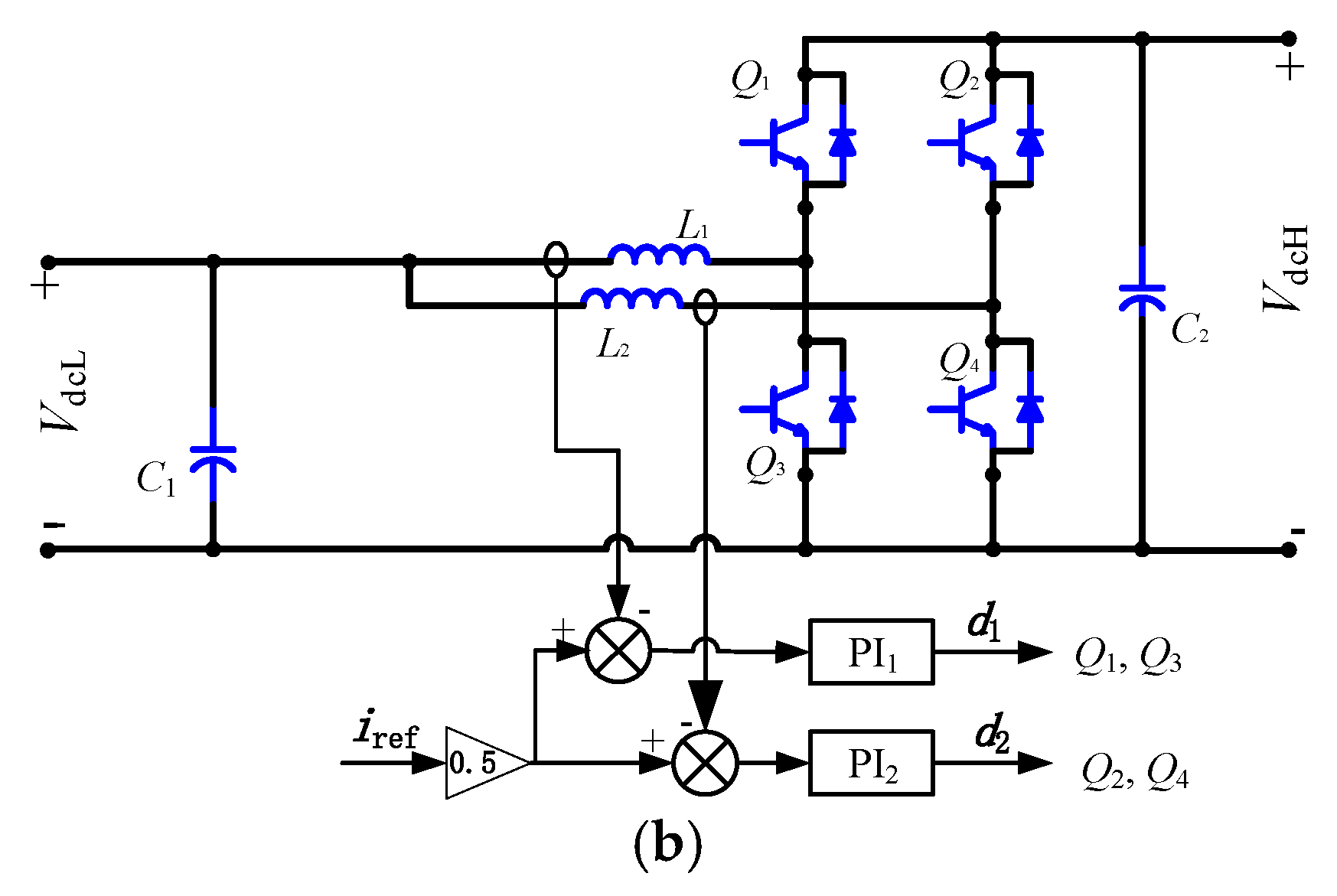
2.1. Modeling of the Bi-DC/DC
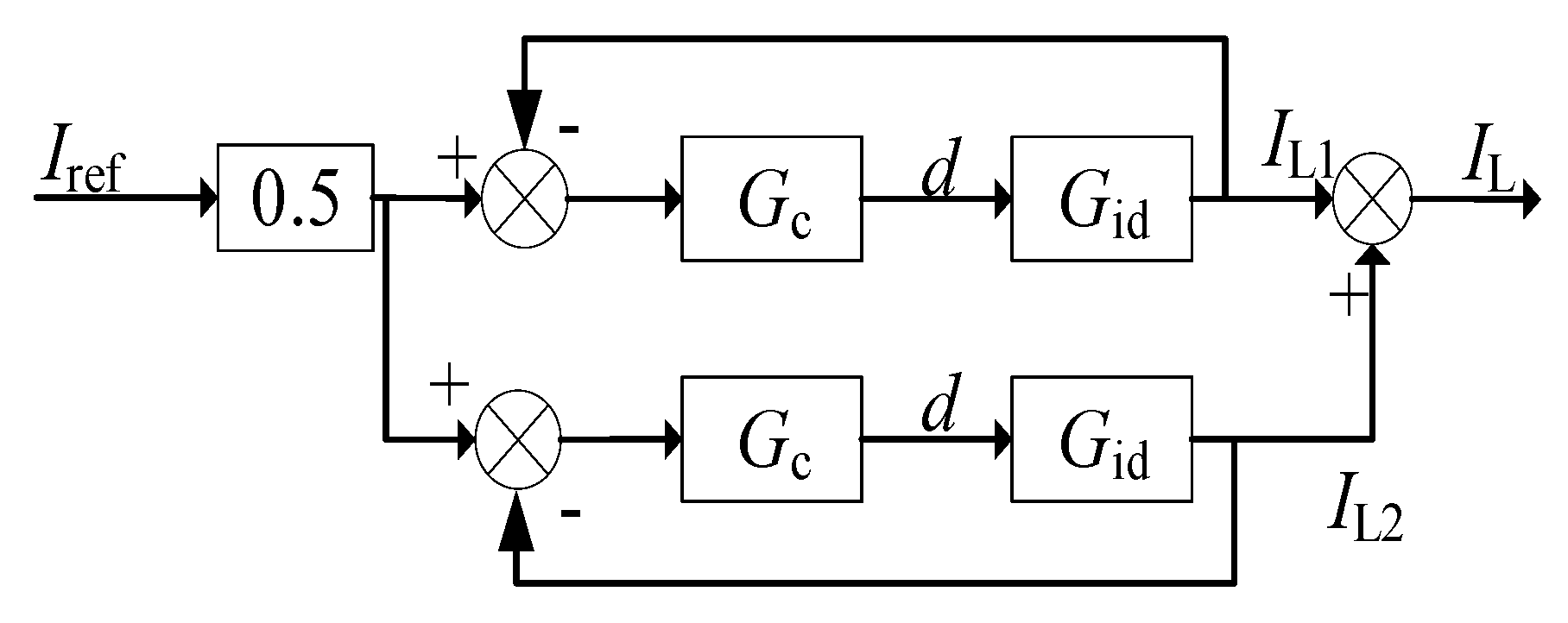
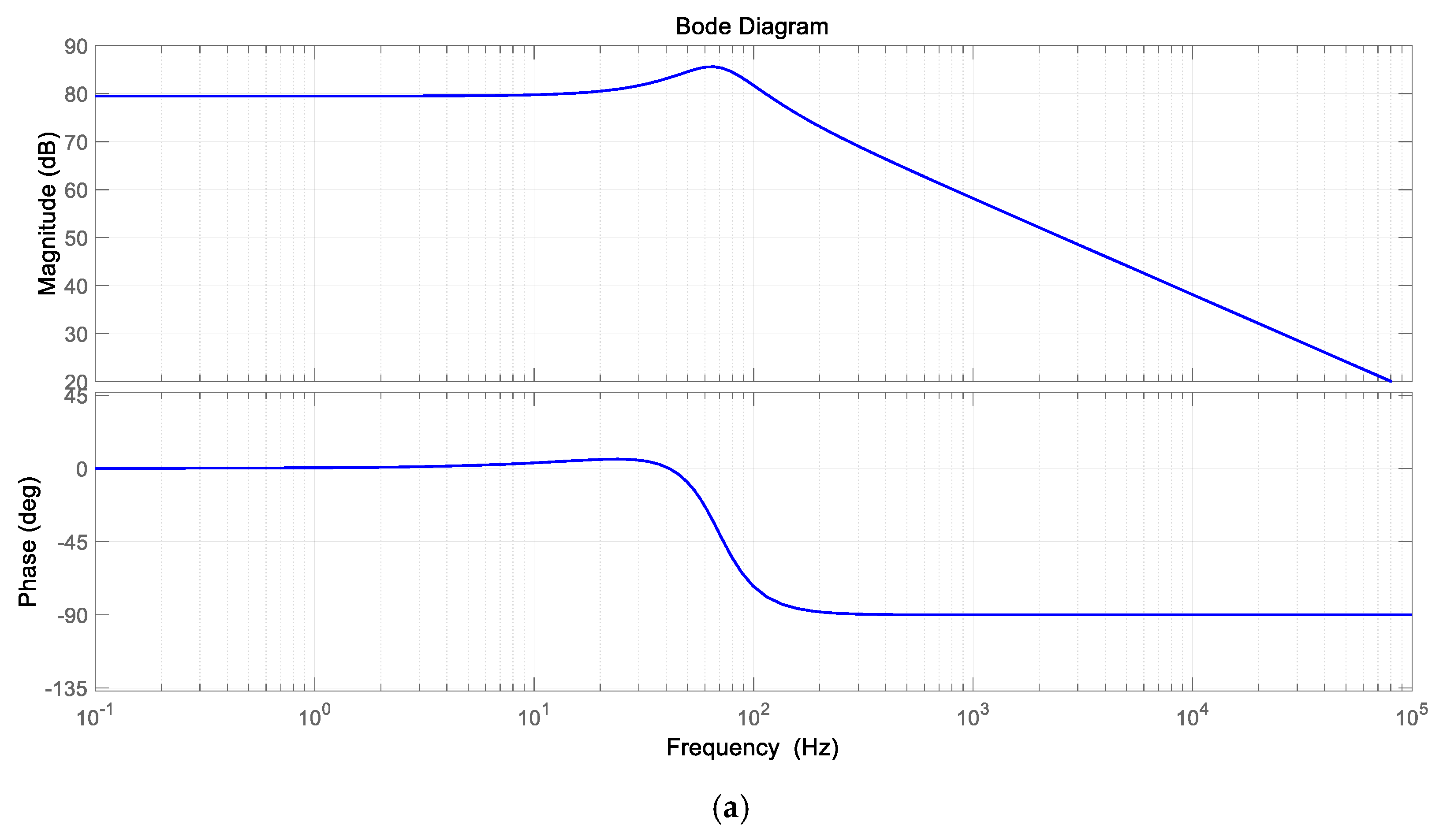
2.2. The Controller Design of the Bi-DC/DC
3. Optimizing of the Mode Switching
3.1. The Switching Characteristics of Bi-DC/DC
- (1)
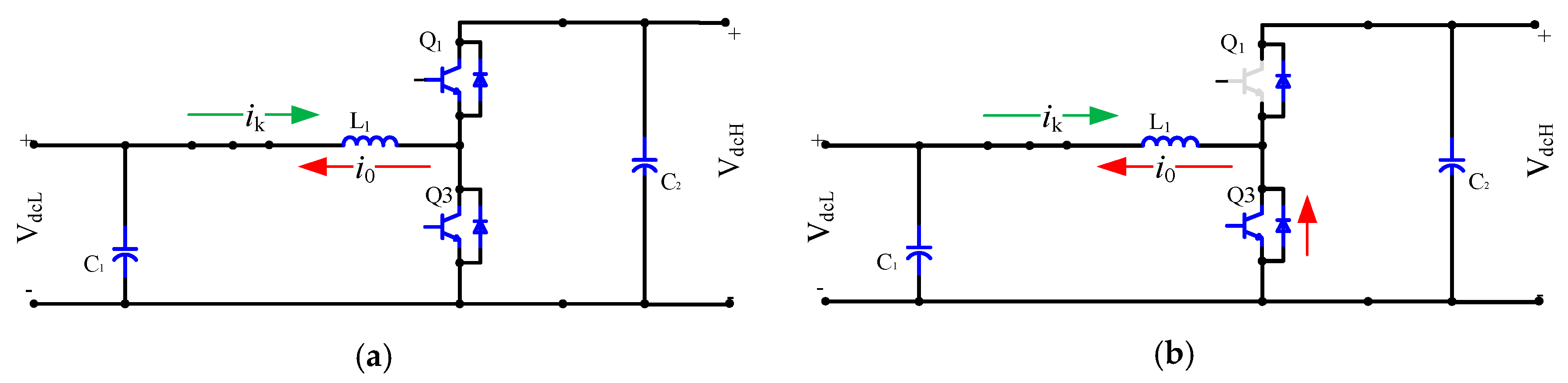
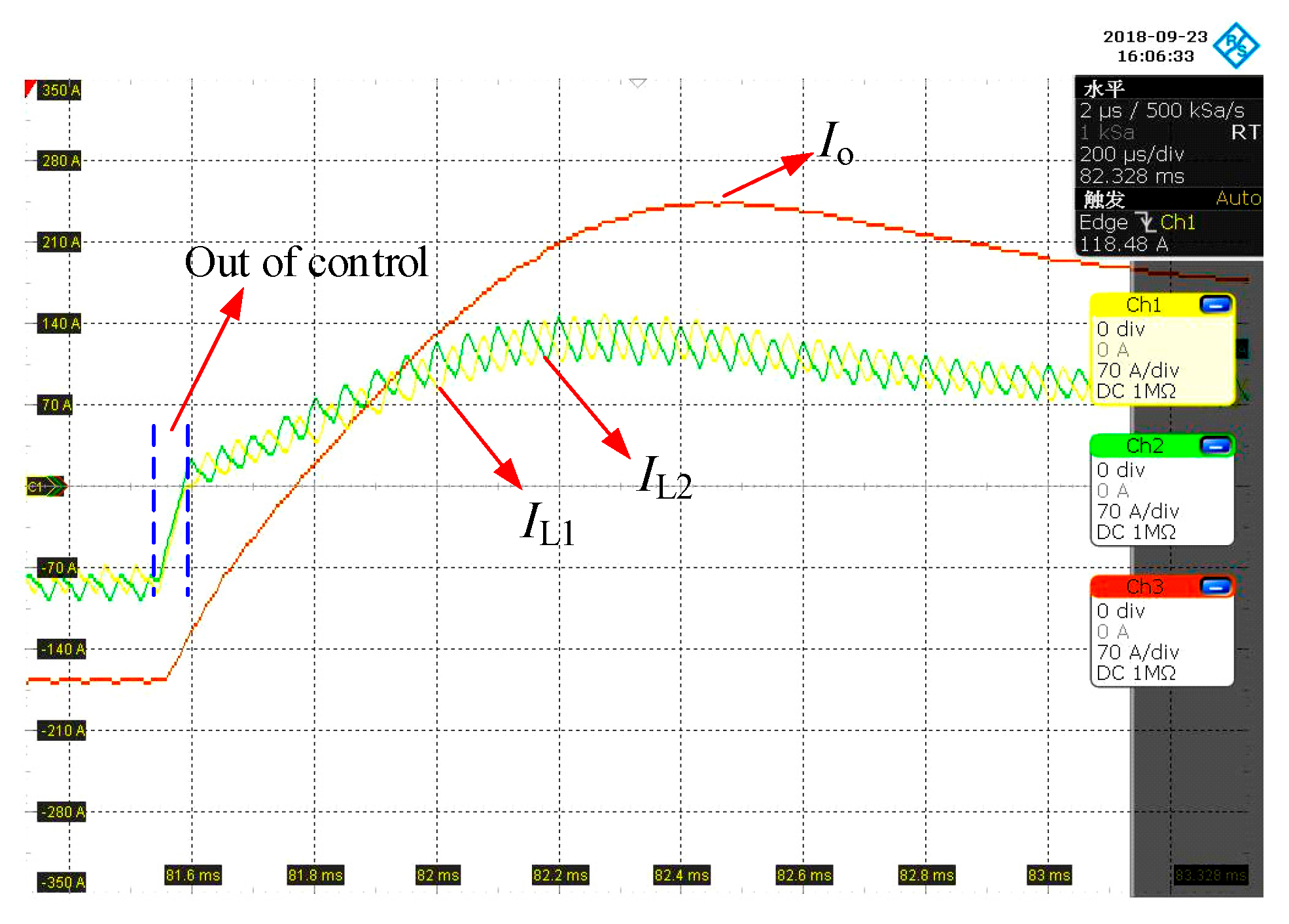
- When mode switching starts, the Q1 is turned off and the Q3 is operated in the high frequency switching mode. The initial inductor current (i0) does not suddenly change its direction, so the current will still flow in the direction of the red arrow (Figure 5b);
- (2)
- In the second step, the initial current will gradually decrease from i0 to 0. During this period, whether Q3 is turned on or turned off, the current will flow in the direction of the red arrow and gradually decrease. This means that the system is out of control during this period and it is impossible to control the inductor current;
- (3)
- After the inductor current is reduced to zero, the system switches to Boost mode. Then the output voltage and current can be controlled by adjusting the duty cycle of Q3, and the switching from Buck mode to Boost mode is successfully completed.
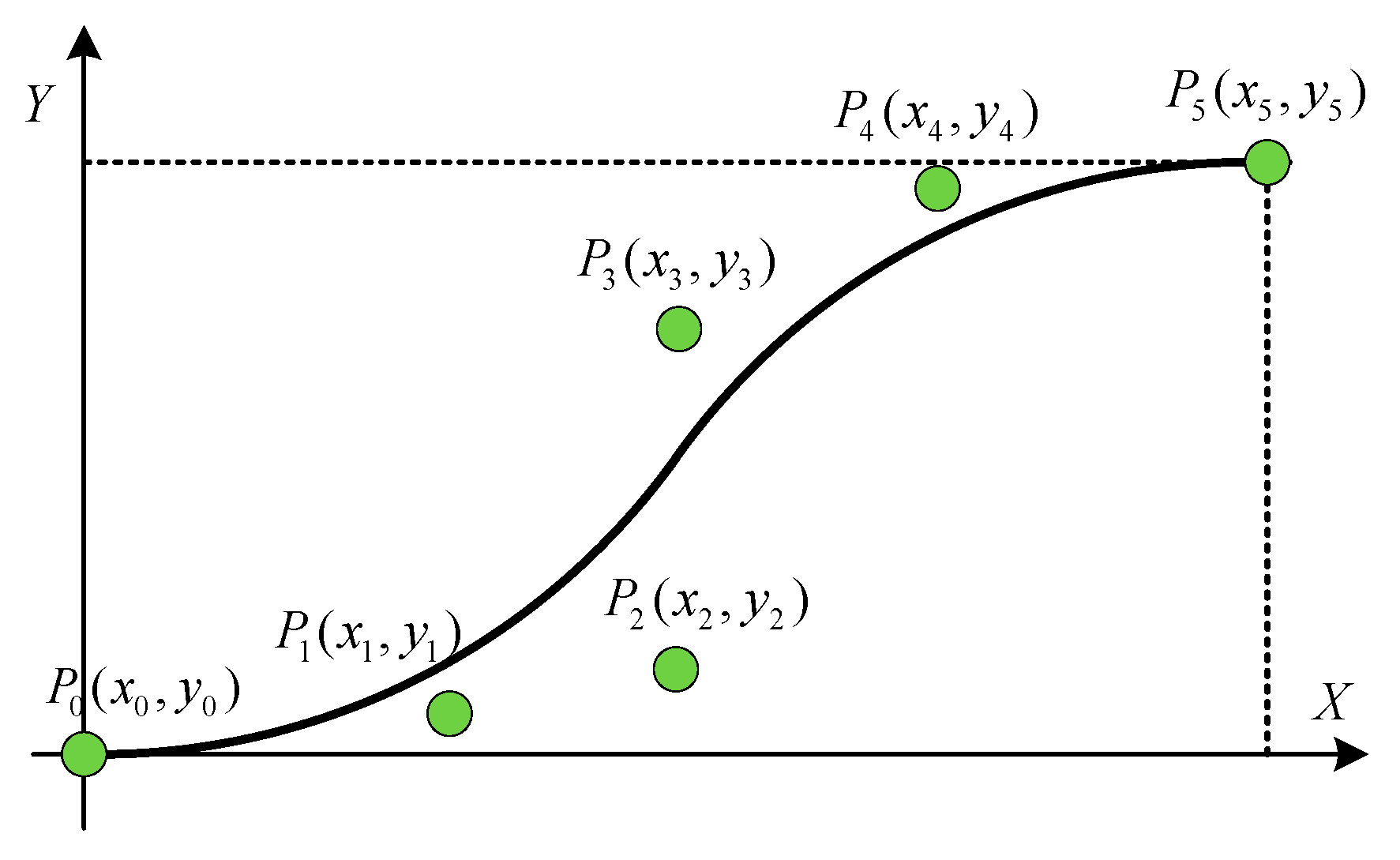
3.2. The Mode Switching Method Based on Optimal Bézier Curve of MOPSO
3.3. Analysis of Mode Switching Process
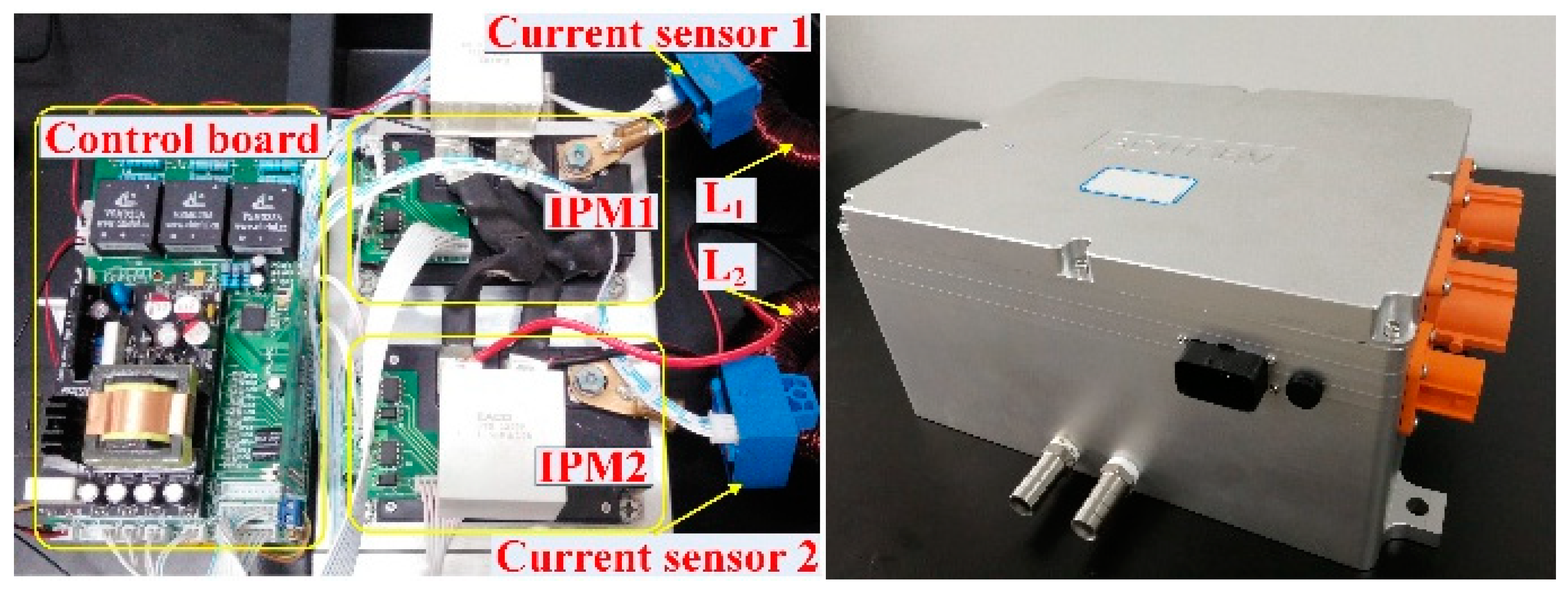
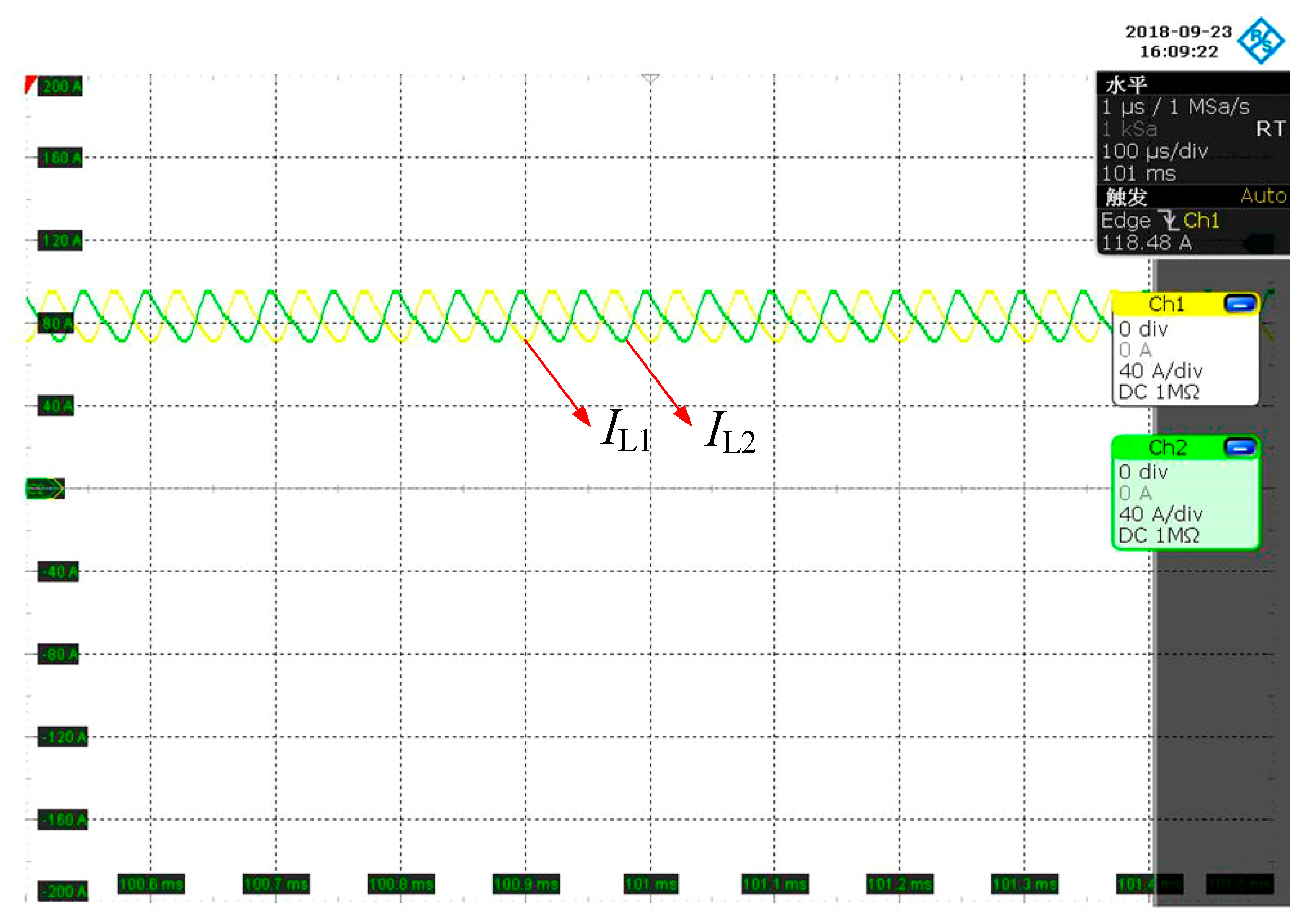
4. Experimental Results
5. Conclusions
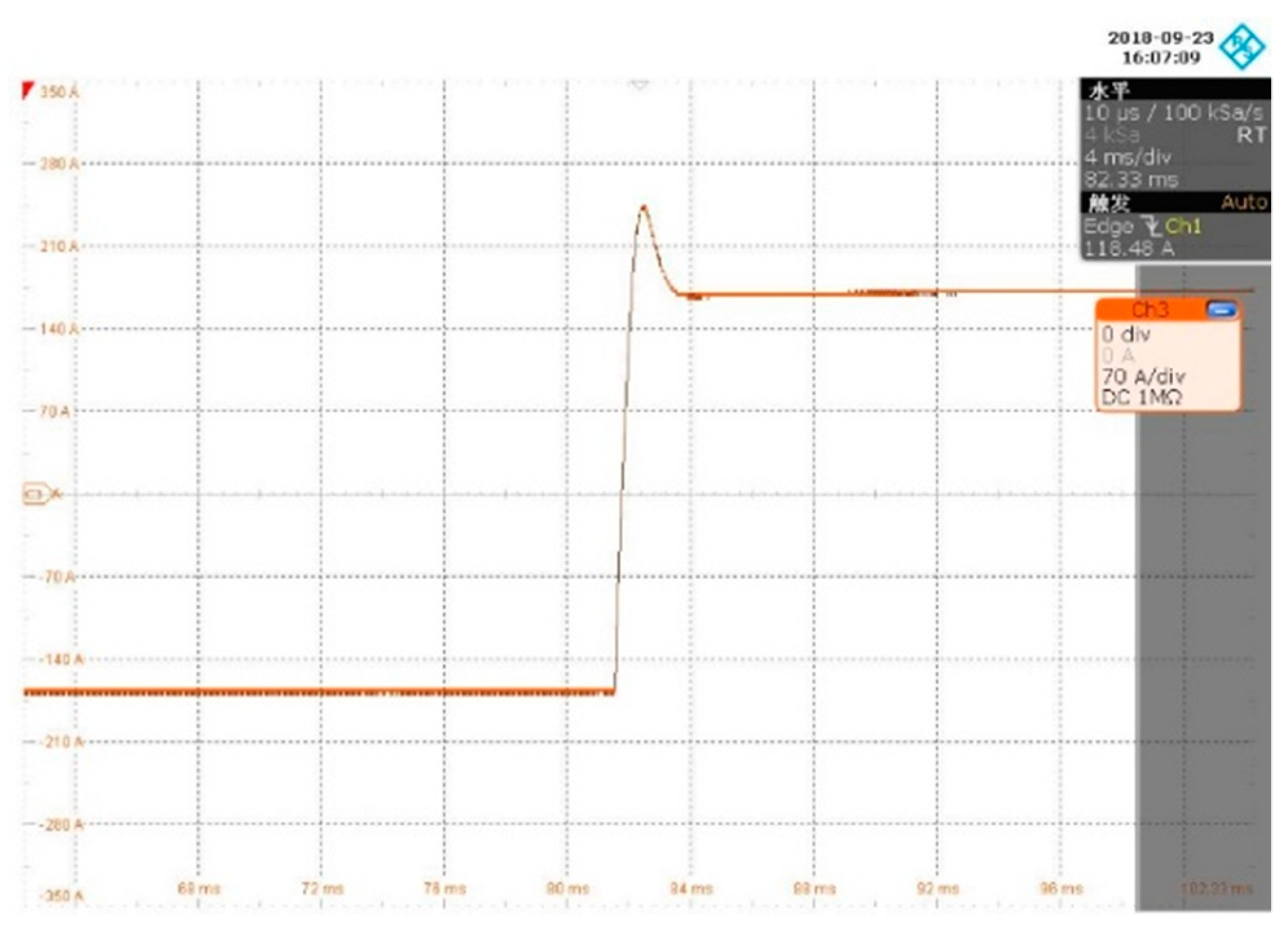
- (1)
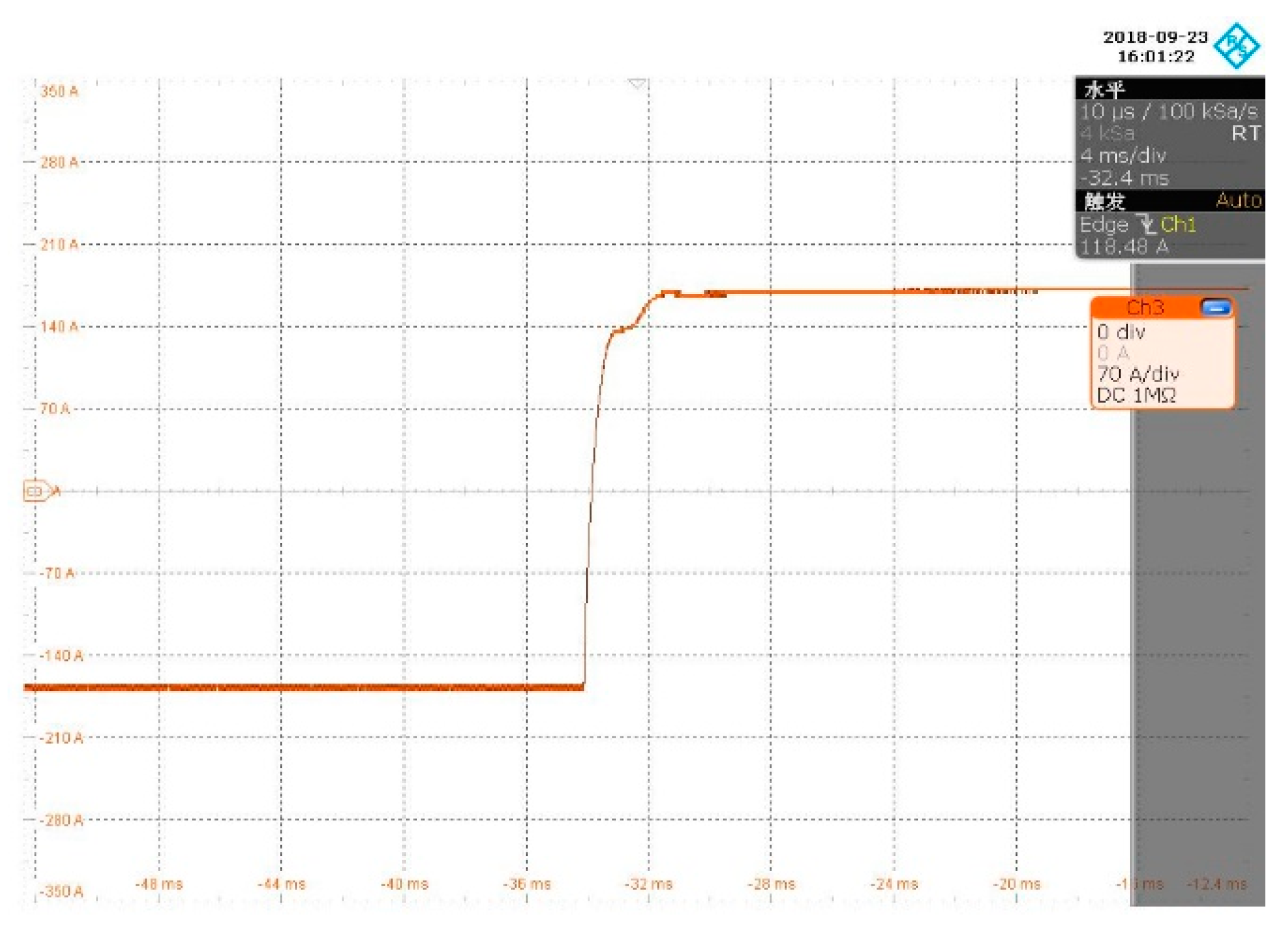
- When Bi-DC/DC mode switching with step signal is carried out, the process will be out of control and a large current overshoot will be generated at its beginning. The result of the prototype test shows that the step switching method produces 44% overshoot.
- (2)
- The current overshoot can be avoided when the mode switching is carried out by a constant slope linear switching method, but the switching time will be prolonged.
- (3)
- A fast and non-overshoot mode switching can be achieved when switching is performed based on the optimized Bézier curve. Using this optimal mode switching method, the prototype test results show that there is no overshoot when the load current is switched from −175 A to 175 A, and the switching time is 2.52 ms.
Author Contributions
Funding
Conflicts of Interest
References
- Zhai, L.; Zhang, T.; Cao, Y.; Yang, S.P.; Kavuma, S.; Feng, H.Y. Conducted EMI Prediction and Mitigation Strategy Based on Transfer Function for a High-Low Voltage DC-DC Converter in Electric Vehicle. Energies 2018, 11, 1028. [Google Scholar] [CrossRef]
- Han, D.; Noppakunkajorn, J.; Sarlioglu, B. Comprehensive Efficiency, Weight, and Volume Comparison of SiC- and Si-Based Bidirectional DC–DC Converters for Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2014, 63, 3001–3010. [Google Scholar] [CrossRef]
- Pahlevaninezhad, M.; Drobnik, J.; Jain, P.K.; Bakhshai, A. A Load Adaptive Control Approach for a Zero-Voltage-Switching DC/DC Converter Used for Electric Vehicles. IEEE Trans. Ind. Electron. 2012, 59, 920–933. [Google Scholar] [CrossRef]
- Dusmez, S.; Hasanzadeh, A.; Khaligh, A. Comparative Analysis of Bidirectional Three-Level DC-DC Converter for Automotive Applications. IEEE Trans. Ind. Electron. 2015, 62, 3305–3315. [Google Scholar] [CrossRef]
- Cortez, D.F.; Waltrich, G.; Fraigneaud, J.; Miranda, H.; Barbi, I. DC-DC Converter for Dual-Voltage Automotive Systems Based on Bidirectional Hybrid Switched-Capacitor Architectures. IEEE Trans. Ind. Electron. 2015, 62, 3296–3304. [Google Scholar] [CrossRef]
- Luo, Y.; Wang, F. Creation of parameter model for the efficiency of Bi-DC/DC in electric vehicle and affecting factor analysis. Qiche Gongcheng/Autom. Eng. 2016, 38, 1396–1401. [Google Scholar]
- Wen, H.; Su, B. Hybrid-mode interleaved boost converter design for fuel cell electric vehicles. Energy Convers. Manag. 2016, 122, 477–487. [Google Scholar] [CrossRef]
- Chen, S.J.; Yang, S.P.; Huang, C.M.; Chou, H.M.; Shen, M.J. Interleaved High Step-Up DC-DC Converter Based on Voltage Multiplier Cell and Voltage-Stacking Techniques for Renewable Energy Applications. Energies 2018, 11, 1632. [Google Scholar] [CrossRef]
- Garcia, O.; Zumel, P.; De Castro, A.; Cobos, J.A. Automotive DC-DC bidirectional converter made with many interleaved buck stages. IEEE Trans. Ind. Electron. 2006, 21, 578–586. [Google Scholar] [CrossRef]
- Zdanowski, M.; Rabkowski, J.; Barlik, R. Highly-Efficient and Compact 6 kW/4 x 125 kHz Interleaved DC-DC Boost Converter with SiC Devices and Low-Capacitive Inductors. Energies 2017, 10, 363. [Google Scholar] [CrossRef]
- Urciuoli, D.P.; Tipton, C.W. Development of a 90 kW bi-directional DC-DC converter for power dense applications. In Proceedings of the Twenty-First Annual IEEE Applied Power Electronics Conference and Exposition, Dallas, TX, USA, 19–23 March 2006; p. 4. [Google Scholar]
- Calderon-Lopez, G.; Forsyth, A.J.; Nuttall, D.R. Design and Performance Evaluation of a 10-kW Interleaved Boost Converter for a Fuel Cell Electric Vehicle. In Proceedings of the CES/IEEE International Power Electronics and Motion Control Conference (IPEMC 2006), Shanghai, China, 14–16 August 2006; pp. 1–5. [Google Scholar]
- Thounthong, P.; Sethakul, P.; Rael, S.; Davat, B. Design and implementation of 2-phase interleaved boost converter for fuel cell power source. In Proceedings of the 4th IET International Conference on Power Electronics, Machines and Drives (PEMD 2008), York, UK, 2–4 April 2008; pp. 91–95. [Google Scholar]
- Xu, H.; Wen, X.; Qiao, E.; Guo, X. High Power Interleaved Boost Converter in Fuel Cell Hybrid Electric Vehicle. In Proceedings of the IEEE International Conference on Electric Machines and Drives, San Antonio, TX, USA, 15 May 2005; pp. 1814–1819. [Google Scholar]
- Huang, X.; Nergaard, T.; Lai, J.S.; Xu, X. A DSP based controller for high-power interleaved boost converters. In Proceedings of the Eighteenth Annual IEEE Applied Power Electronics Conference and Exposition, Miami Beach, FL, USA, 9–13 February 2003; Volume 1, pp. 327–333. [Google Scholar]
- Xinquan, L.; Jianping, G.; Weixue, Y.; Yu, C. A novel digital soft-start circuit for DC-DC switching regulator. In Proceedings of the International Conference on ASIC, Shanghai, China, 24–27 October 2006. [Google Scholar]
- Zhou, M.; Sun, Z.; Low, Q.W.; Siek, L. Fast transient response DC-DC converter with start-up in-rush current control. Electron. Lett. 2016, 52, 1883–1885. [Google Scholar] [CrossRef]
- Zhao, C.; Round, S.; Kolar, J.W. Buck and boost start-up operation of a three-port power supply for hybrid vehicle applications. In Proceedings of the 36th IEEE Power Electronics Specialists Conference, Recife, Brazil, 16 June 2005; pp. 1851–1857. [Google Scholar]
- Kondo, R.; Higaki, Y.; Yamada, M. Proposition and experimental verification of a bi-directional isolated DC/DC converter for battery charger-discharger of electric vehicle. In Proceedings of the Applied Power Electronics Conference and Exposition, Long Beach, CA, USA, 20–24 March 2016. [Google Scholar]
- Basso, C.P. Switch-Mode Power Supplies—SPICE Simulations and Practical Designs; McGraw-Hill, Inc.: New York, NY, USA, 2014. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995. [Google Scholar]
- Coello, C.A.C.; Lechuga, M.S. MOPSO: A proposal for multiple objective particle swarm optimization. In Proceedings of the 2002 Congress on Evolutionary Computation, Honolulu, HI, USA, 12–17 May 2002; pp. 1051–1056. [Google Scholar]
- Garcia, I.C.; Coello, C.A.C.; Arias-Montano, A. MOPSOhv: A New Hypervolume-based Multi-Objective Particle Swarm Optimizer. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation (CEC), Beijing, China, 6–11 July 2014; pp. 266–273. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| High side voltage range | 280–420 V |
| Low side voltage range | 110–230 V |
| Rated inductor current | 250 A |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Luo, Y.; Li, H.; Xu, X. Switching Characteristics Optimization of Two-Phase Interleaved Bidirectional DC/DC for Electric Vehicles. Energies 2019, 12, 378. https://doi.org/10.3390/en12030378
Wang F, Luo Y, Li H, Xu X. Switching Characteristics Optimization of Two-Phase Interleaved Bidirectional DC/DC for Electric Vehicles. Energies. 2019; 12(3):378. https://doi.org/10.3390/en12030378
Chicago/Turabian StyleWang, Feng, Yutao Luo, Hongluo Li, and Xiaotong Xu. 2019. "Switching Characteristics Optimization of Two-Phase Interleaved Bidirectional DC/DC for Electric Vehicles" Energies 12, no. 3: 378. https://doi.org/10.3390/en12030378