Power Stabilization based on Switching Control of Segmented Transmitting Coils for Multi Loads in Static-Dynamic Hybrid Wireless Charging System at Traffic Lights

 ,
,
Abstract
:1. Introduction
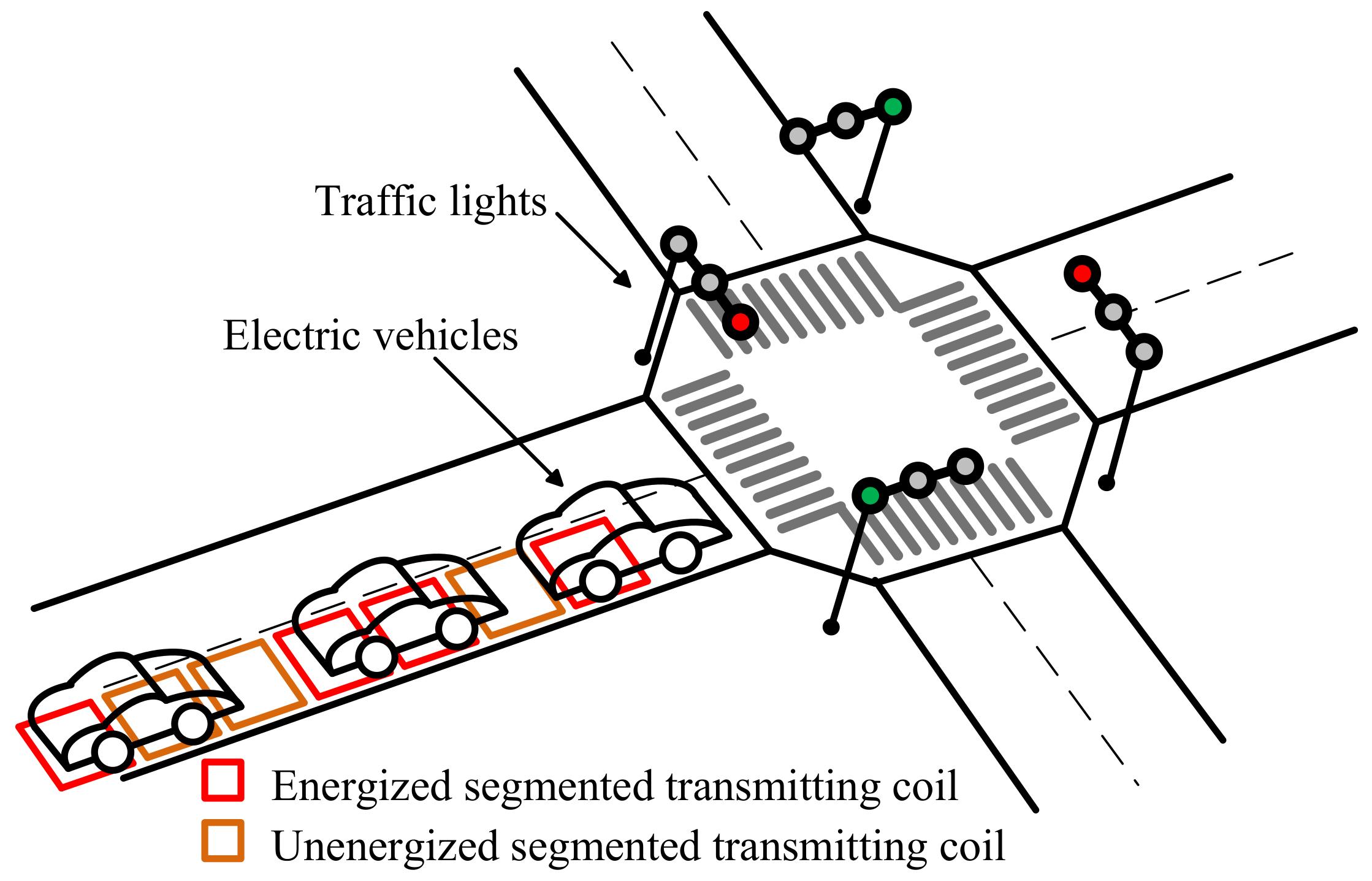
2. System Description
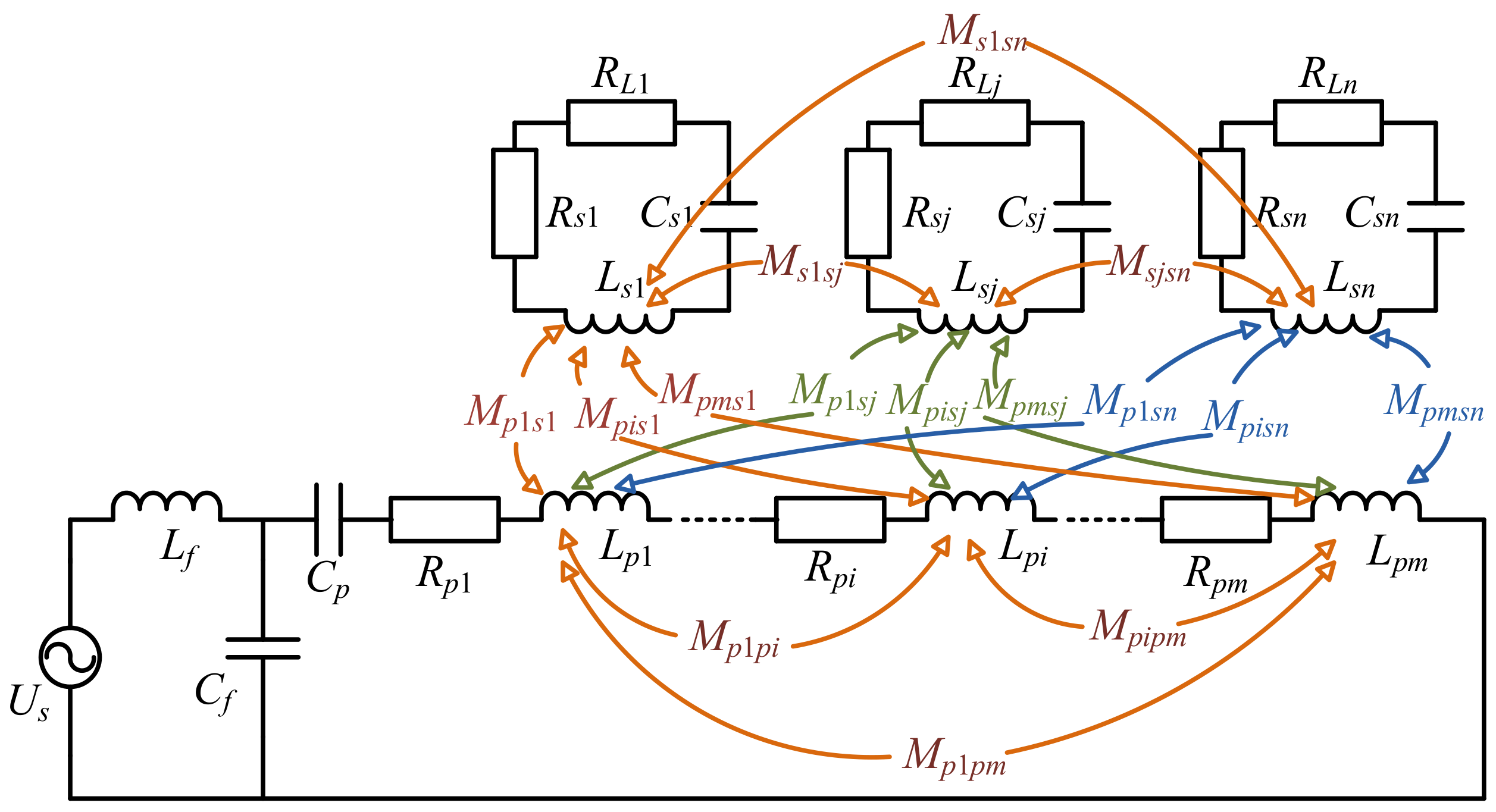
3. System Modeling
4. System Characteristics Analysis
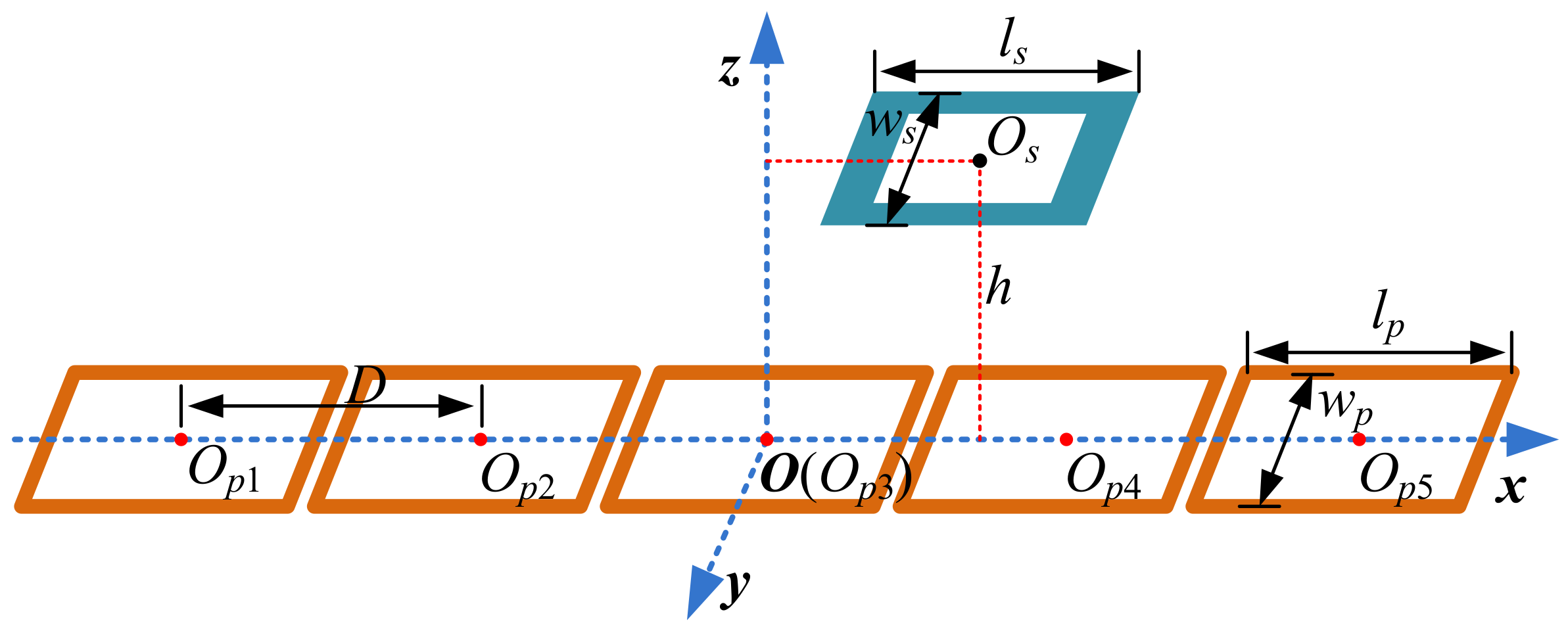
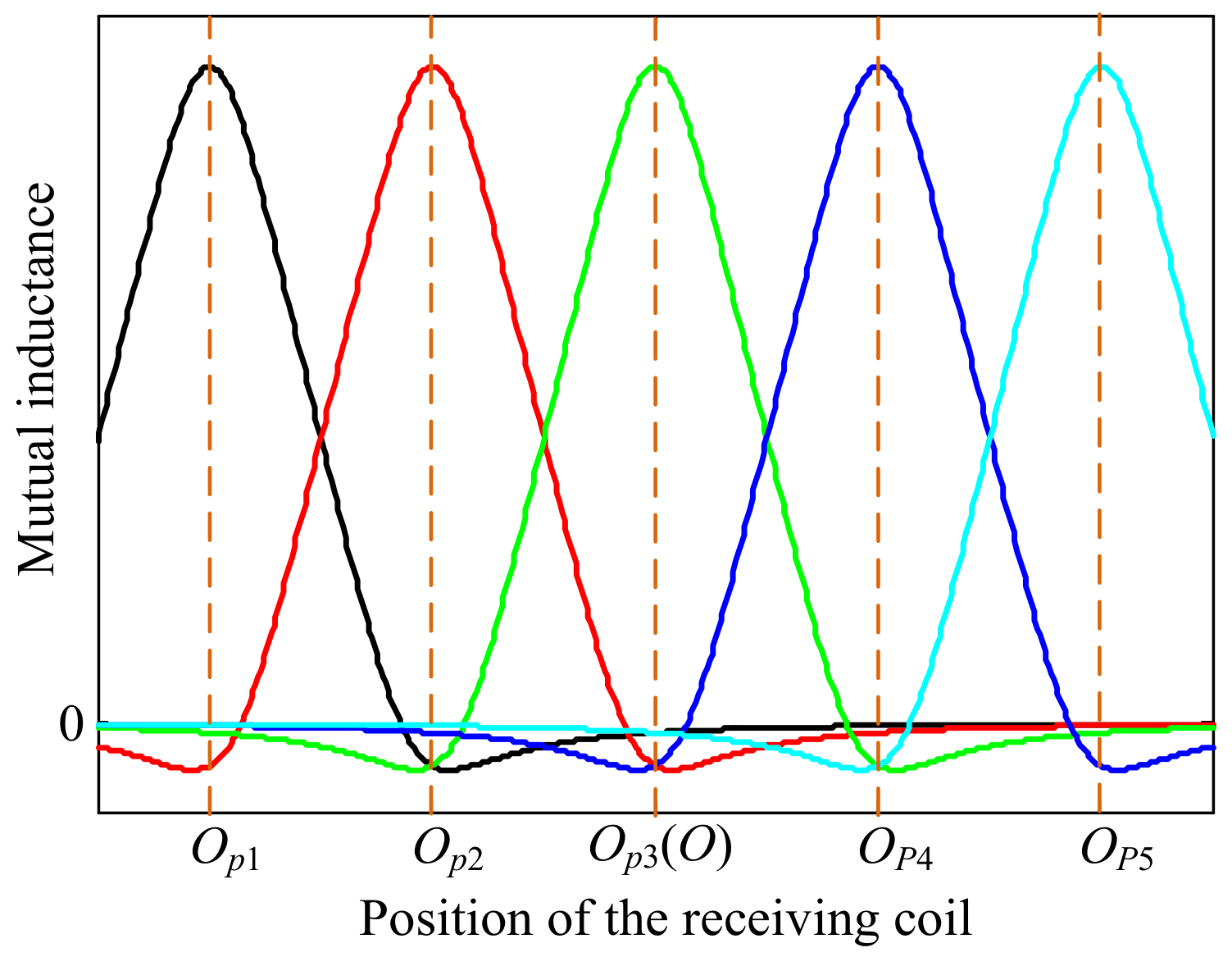
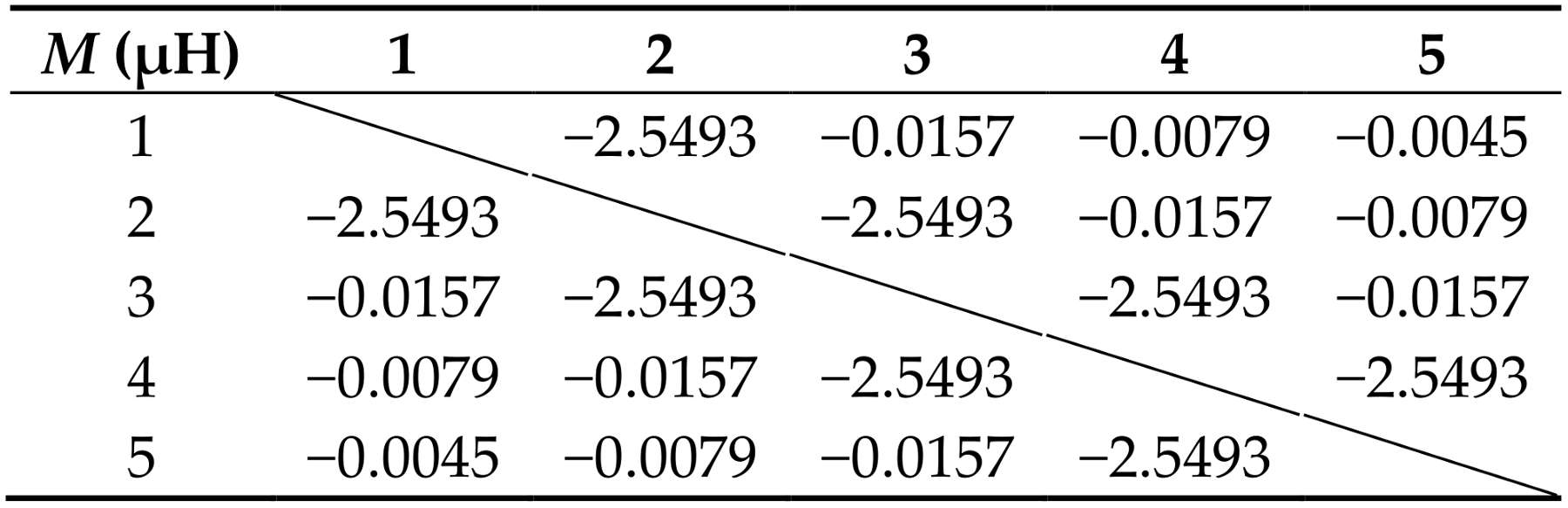
4.1. The Variation Characteristics of Mutual Inductance between the Primary and Secondary Sides
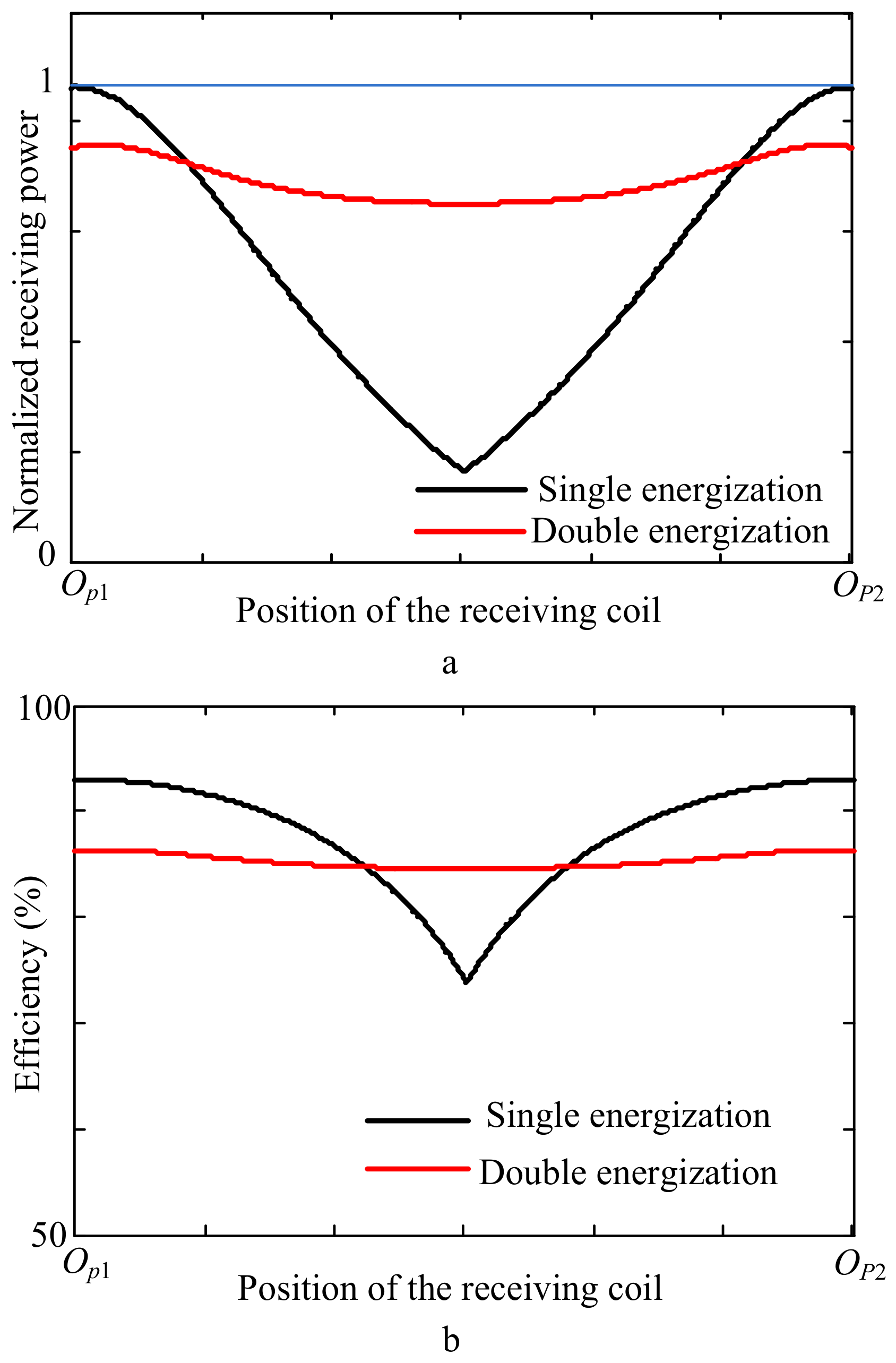
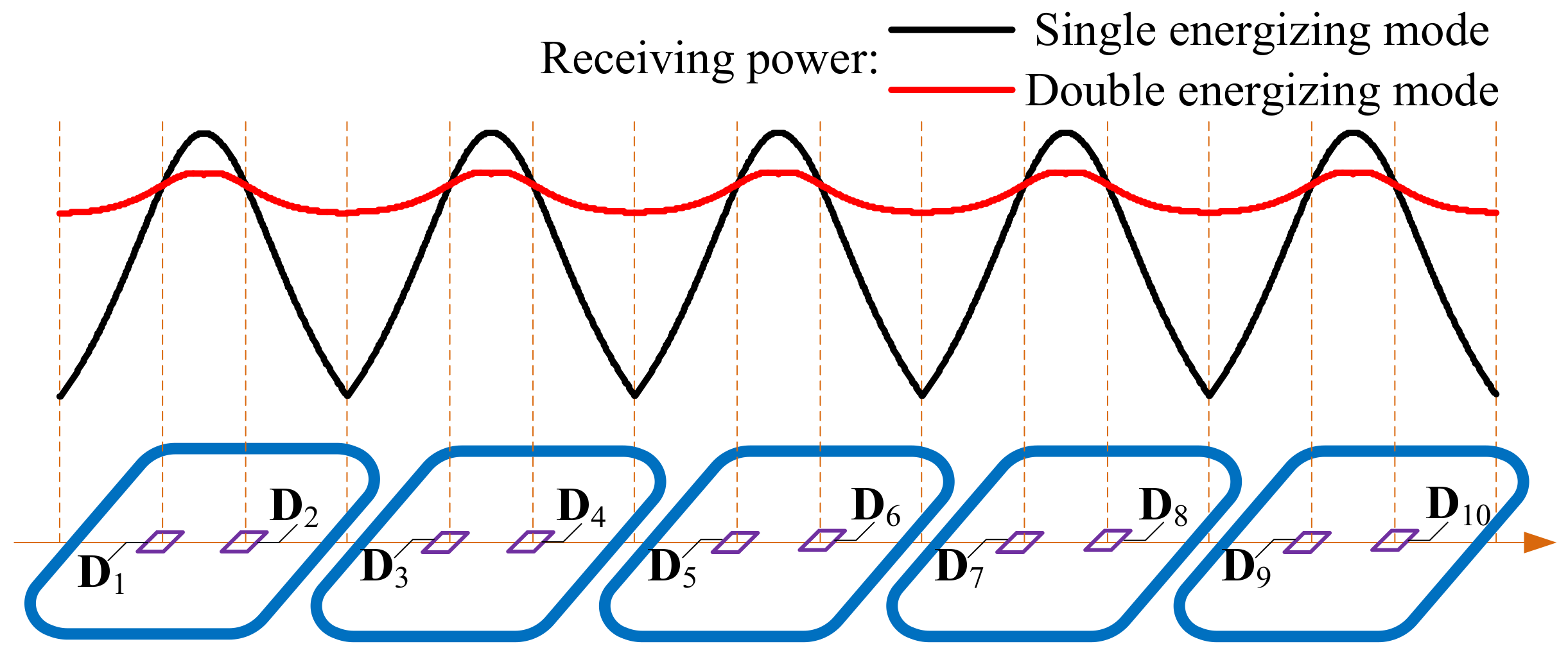
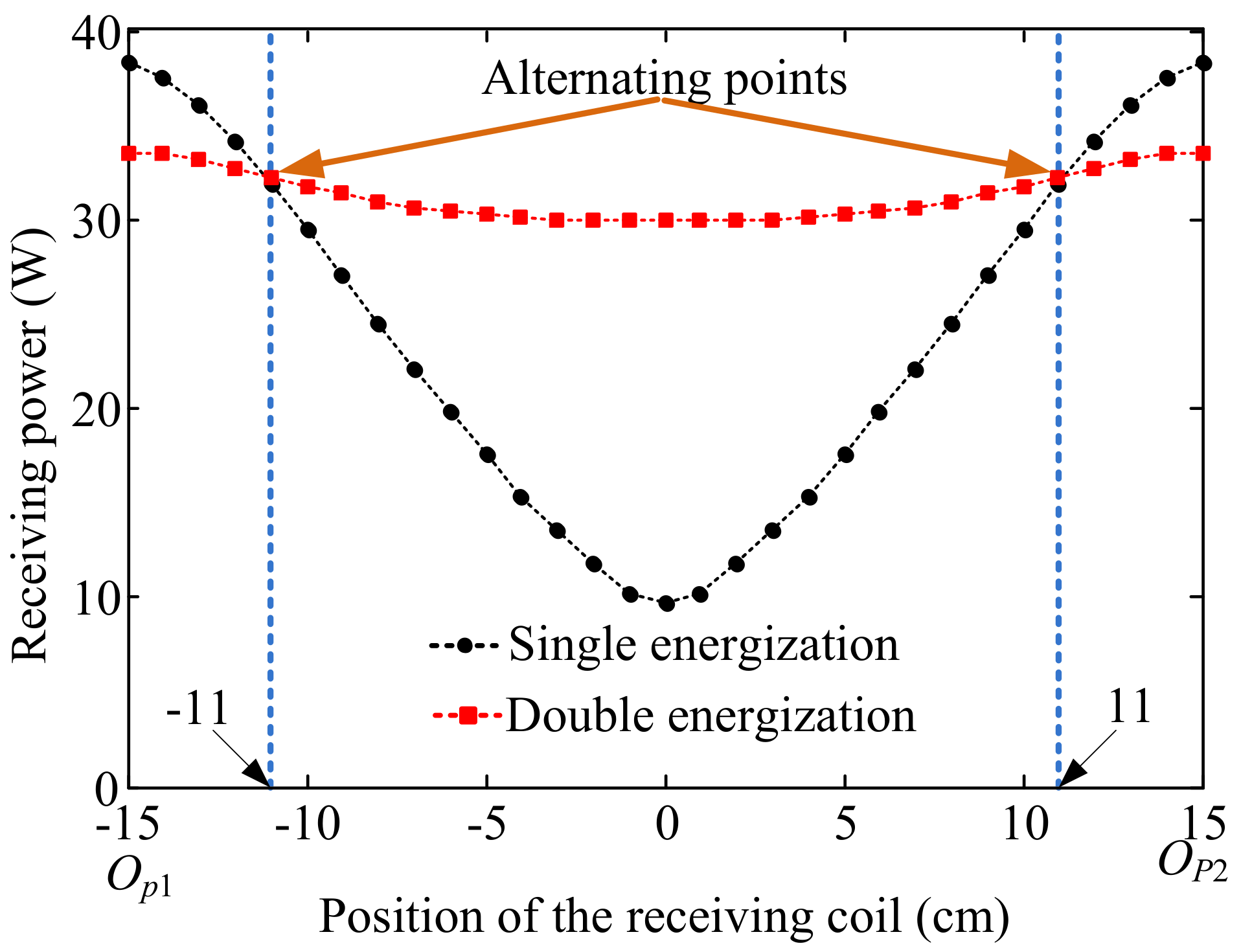
4.2. The Comparative Analysis of the Energizing Mode of the Transmitting Coils for a Single Load
5. Switching Control and Power Stabilization Strategy
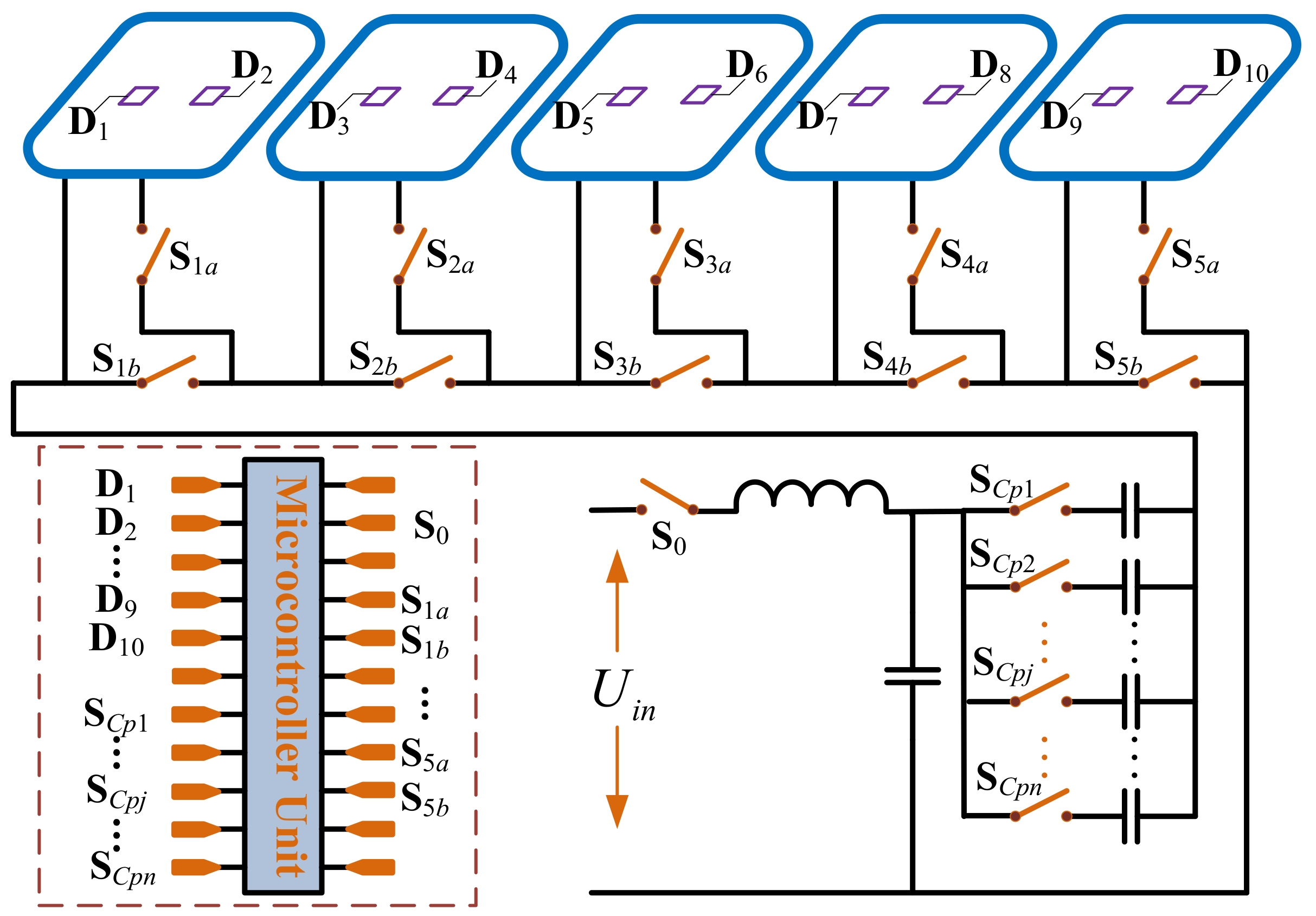
5.1. Topology Design of the Detection and Switching Control in Primary Side
5.2. Control Conception of the Multiple Compensation Capacitors
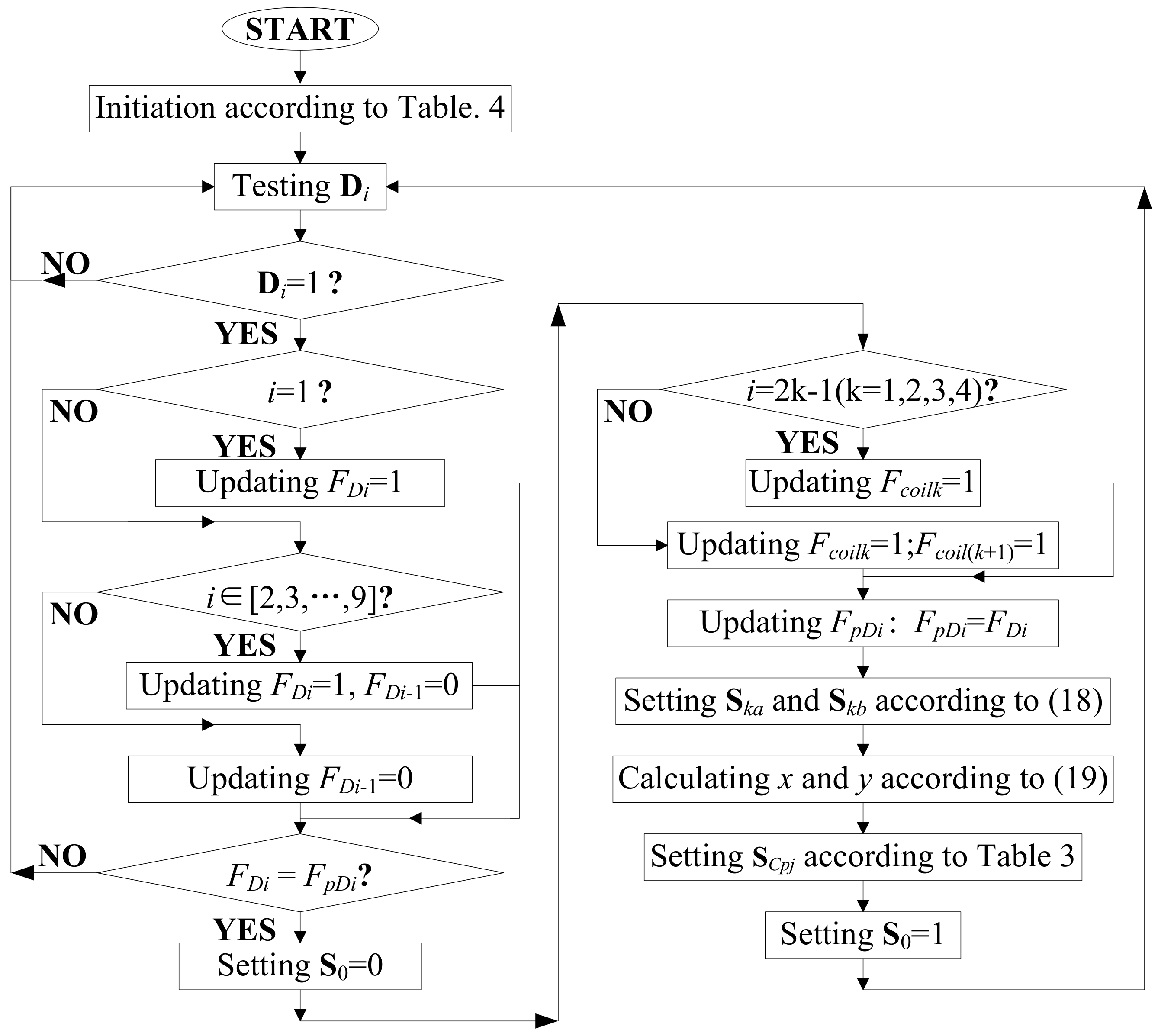
5.3. The Power Stabilization Control Strategy of the Static-Dynamic Hybrid Wireless Charging System
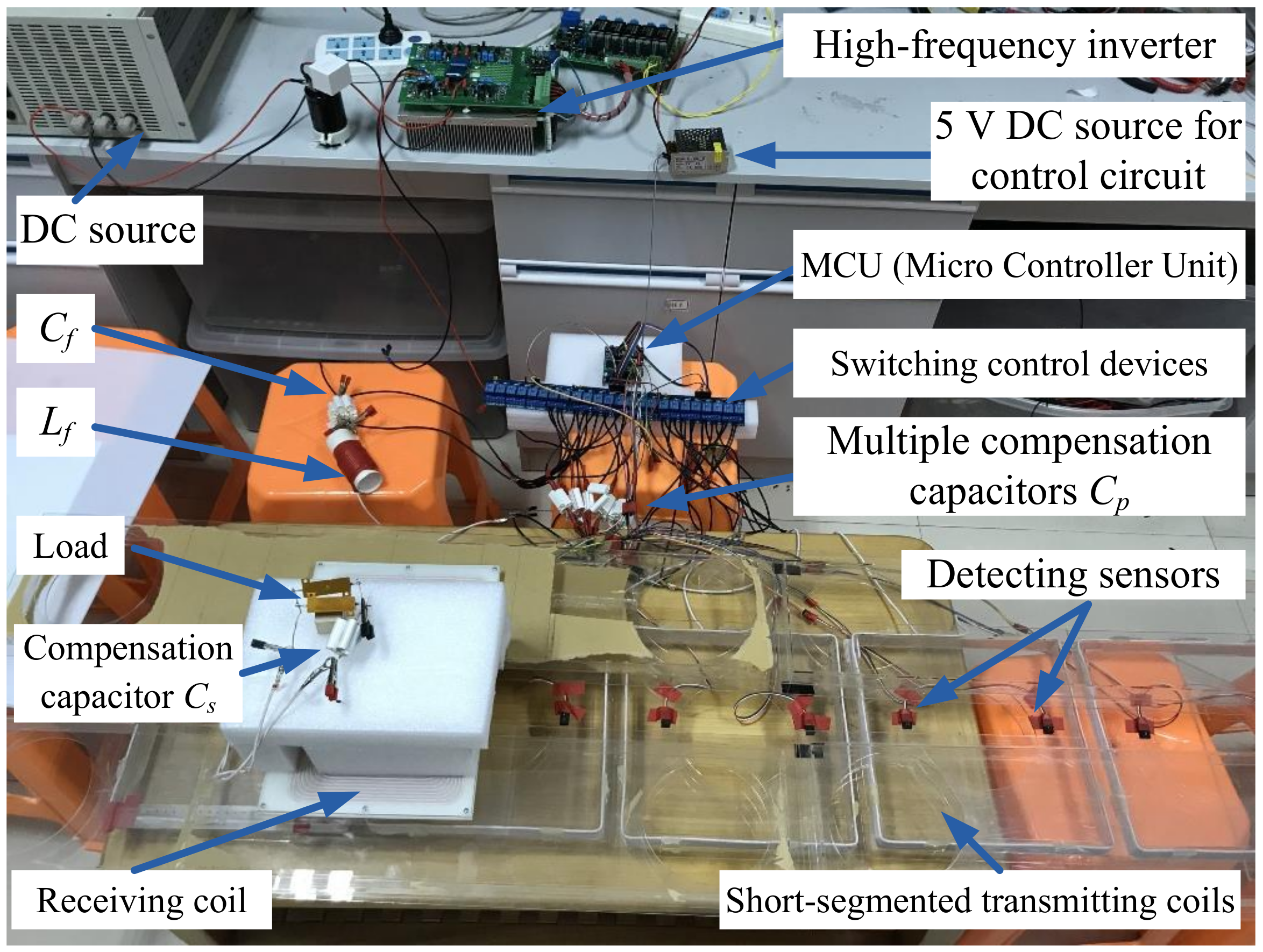
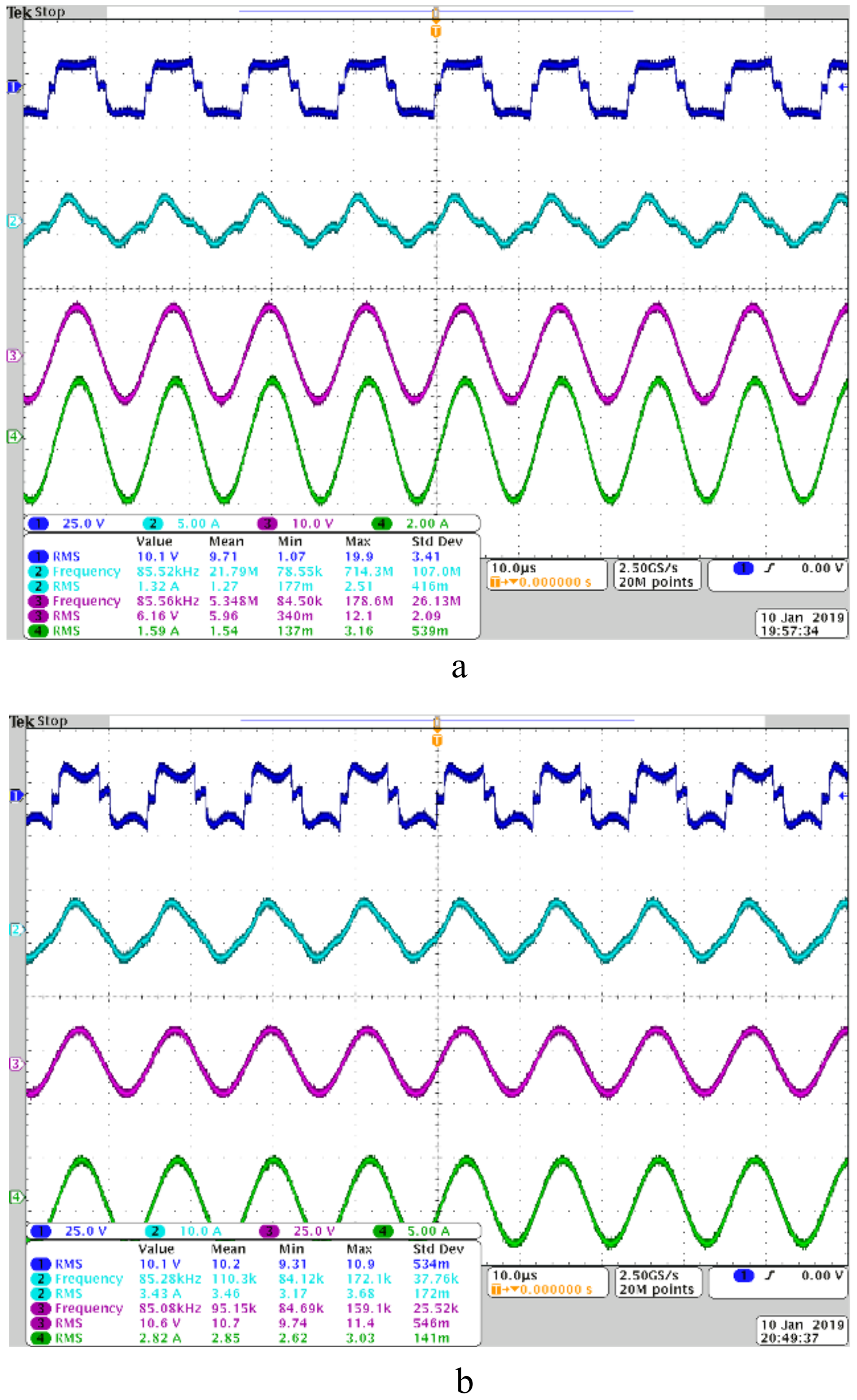
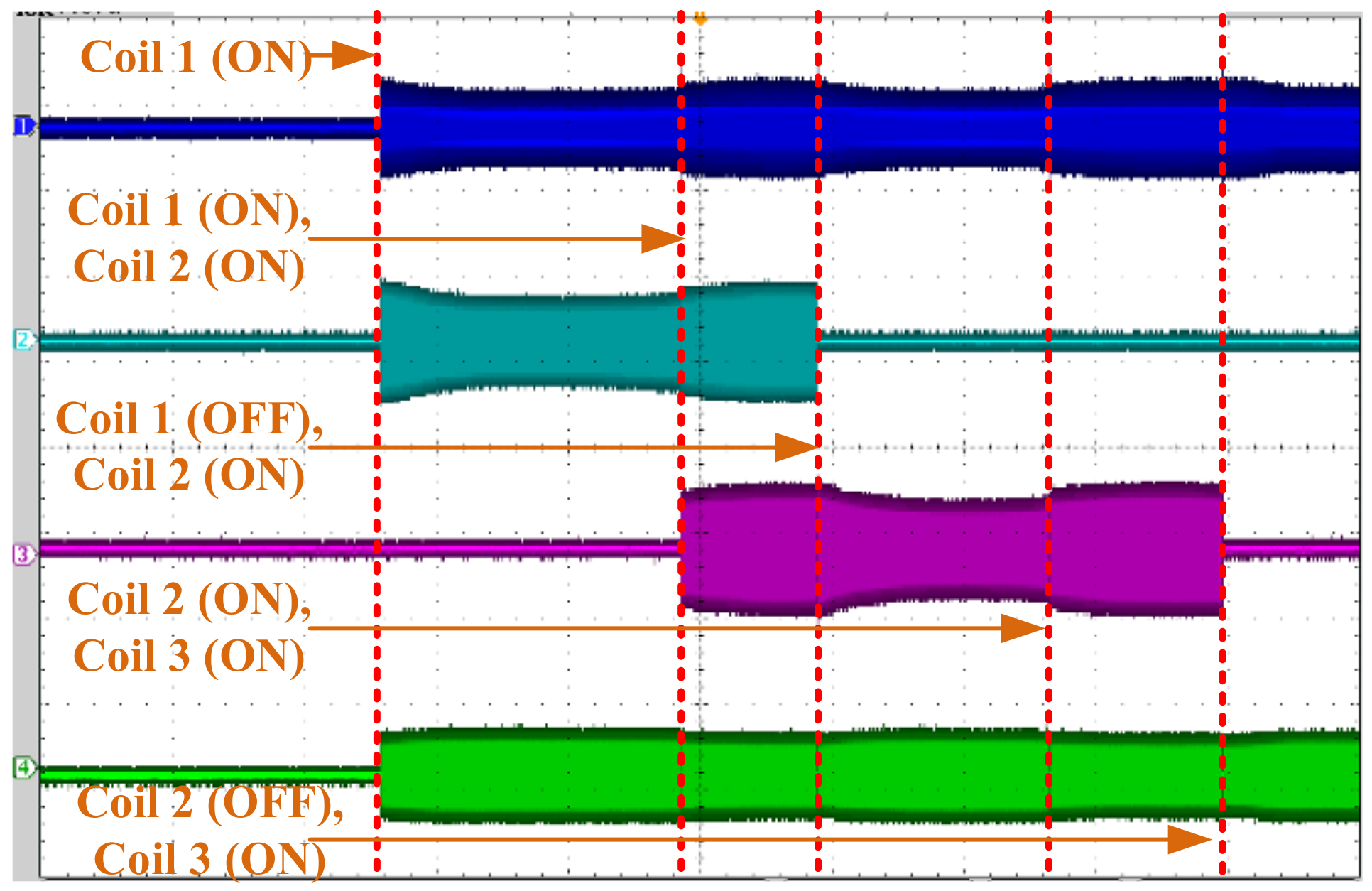
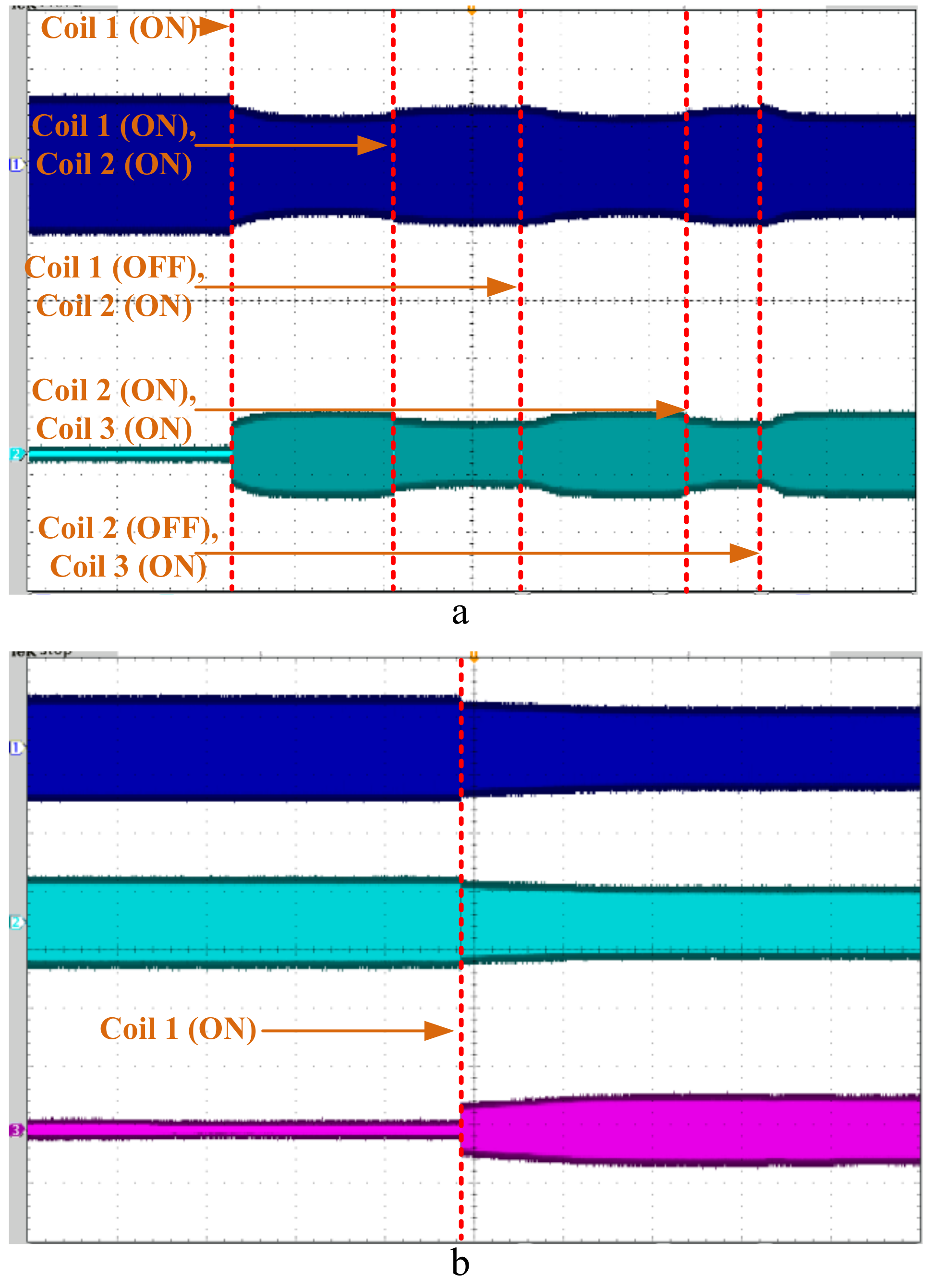
6. Experimental Verification
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, S.; Mi, C.C. Wireless Power Transfer for Electric Vehicle Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Patil, D.; McDonough, M.K.; Miller, J.M.; Fahimi, B.; Balsara, P.T. Wireless Power Transfer for Vehicular Applications: Overview and Challenges. IEEE Trans. Transp. Electrif. 2018, 4, 3–37. [Google Scholar] [CrossRef]
- Bojarski, M.; Asa, E.; Colak, K.; Czarkowski, D. Analysis and control of multiphase inductively coupled resonant converter for wireless electric vehicle charger applications. IEEE Trans. Transp. Electrif. 2017, 3, 312–320. [Google Scholar] [CrossRef]
- Bojarski, M.; Asa, E.; Colak, K.; Czarkowski, D. A 25 kW industrial prototype wireless electric vehicle charger. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 1756–1761. [Google Scholar]
- Bosshard, R.; Kolar, J.W.; Mühlethaler, J.; Stevanović, I.; Wunsch, B.; Canales, F. Modeling and eta-alpha-Pareto Optimization of Inductive Power Transfer Coils for Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 50–64. [Google Scholar] [CrossRef]
- Keeling, N.A.; Covic, G.A.; Boys, J.T. A unity-power-factor IPT pickup for high-power applications. IEEE Trans. Ind. Electron. 2010, 57, 744–751. [Google Scholar] [CrossRef]
- Li, W.; Zhao, H.; Li, S.; Deng, J.; Kan, T.; Mi, C.C. Integrated LCC compensation topology for wireless charger in electric and plug-in electric vehicles. IEEE Trans. Ind. Electron. 2015, 62, 4215–4225. [Google Scholar] [CrossRef]
- Zhong, W.X.; Hui, S.Y.R. Maximum energy efficiency tracking for wireless power transfer systems. IEEE Trans. Power Electron. 2015, 30, 4025–4034. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, L.; Wang, Y.; Liu, J.; Wu, M.; Ning, G. Analysis, Design and Implementation of WPT System for EV’s Battery Charging based on Optimal Operation Frequency Range. IEEE Trans. Power Electron. 2018. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Kwak, H.G.; Jang, G.C.; Rim, C.T. Living object detection system based on comb pattern capacitive sensor for wireless EV chargers. In Proceedings of the IEEE 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar]
- Jeong, S.Y.; Thai, V.X.; Park, J.H.; Rim, C.T. Self-Inductance-Based Metal Object Detection with Mistuned Resonant Circuits and Nullifying Induced Voltage for Wireless EV Chargers. IEEE Trans. Power Electron. 2019, 34, 748–758. [Google Scholar] [CrossRef]
- Kim, S.; Park, H.-H.; Kim, J.; Kim, J.; Ahn, S. Design and analysis of a resonant reactive shield for a wireless power electric vehicle. IEEE Trans. Microw. Theory Tech. 2014, 62, 1057–1066. [Google Scholar] [CrossRef]
- Choi, S.Y.; Gu, B.W.; Jeong, S.Y.; Rim, C.T. Advances in Wireless Power Transfer Systems for Roadway-Powered Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 18–36. [Google Scholar] [CrossRef]
- Nagendra, G.R.; Chen, L.; Covic, G.A.; Boys, J.T. Detection of EVs on IPT highways. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 584–597. [Google Scholar] [CrossRef]
- Liu, W.; Chau, K.T.; Lee, C.H.T.; Jiang, C.; Han, W. A Switched-Capacitorless Energy-Encrypted Transmitter for Roadway-Charging Electric Vehicles. IEEE Trans. Magn. 2018, 54, 1–6. [Google Scholar]
- Zhang, Z.; Ai, W.; Liang, Z.; Wang, J. Topology-Reconfigurable Capacitor Matrix for Encrypted Dynamic Wireless Charging of Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 9284–9293. [Google Scholar] [CrossRef]
- Zhao, L.; Thrimawithana, D.J.; Madawala, U.K.; Hu, A.P.; Mi, C.C. A Misalignment-Tolerant Series-Hybrid Wireless EV Charging System with Integrated Magnetics. IEEE Trans. Power Electron. 2019, 34, 1276–1285. [Google Scholar] [CrossRef]
- Jeong, S.; Jang, Y.J.; Kum, D. Economic Analysis of the Dynamic Charging Electric Vehicle. IEEE Trans. Power Electron. 2015, 30, 6368–6377. [Google Scholar] [CrossRef]
- Limb, B.J.; Asher, Z.D.; Bradley, T.H.; Sproul, E.; Trinko, D.A.; Crabb, B.; Zane, R.; Quinn, J.C. Economic Viability and Environmental Impact of In-Motion Wireless Power Transfer. IEEE Trans. Transp. Electrif. 2018. [Google Scholar] [CrossRef]
- Zhang, Z.; Pang, H.; Georgiadis, A.; Cecati, C. Wireless Power Transfer—An Overview. IEEE Trans. Ind. Electron. 2019, 66, 1044–1058. [Google Scholar] [CrossRef]
- Zhou, S.; Zhu, C.; Cui, S.; Wang, Z.; Zhou, S.; Chan, C.C. Dynamic Wireless Power Transfer System for Electric Vehicles Employing Multiplexing LCC Modules with Individual Transmitters. IEEE Access 2018, 6, 62514–62527. [Google Scholar] [CrossRef]
- Sallan, J.; Villa, J.L.; Llombart, A.; Sanz, J.F. Optimal Design of ICPT Systems Applied to Electric Vehicle Battery Charge. IEEE Trans. Ind. Electron. 2009, 56, 2140–2149. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | lp | wp | ls | ws | N1 | N2 | D | h |
|---|---|---|---|---|---|---|---|---|
| Values | 270 mm | 270 mm | 300 mm | 200 mm | 7 | 10 | 300 mm | 80 mm |
| x | 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|---|
| y | ||||||
| 0 | Cp1 | Cp2 | Cp3 | × | × | |
| 1 | × | Cp4 | Cp5 | × | × | |
| 2 | × | × | × | Cp6 | × | |
| 3 | × | × | × | Cp7 | × | |
| 4 | × | × | × | × | × | |
| Variables | FDi | FpDi | Fcoilk | n | S0 | Ska | Skb | Scpj | x | y |
|---|---|---|---|---|---|---|---|---|---|---|
| Value | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 |
| Cpi | Cp1 | Cp2 | Cp3 | Cp4 | Cp5 | Cp6 | Cp7 |
|---|---|---|---|---|---|---|---|
| Calculation values (nF) | 124.3 | 57.1 | 37.1 | 62.9 | 39.4 | 30.1 | 31.7 |
| Measured values (nF) | 124.8 | 57.3 | 37.1 | 62.6 | 39.6 | 30.2 | 32.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Tan, L.; Huang, X.; Zhang, M.; Zhang, Z.; Li, J. Power Stabilization based on Switching Control of Segmented Transmitting Coils for Multi Loads in Static-Dynamic Hybrid Wireless Charging System at Traffic Lights. Energies 2019, 12, 607. https://doi.org/10.3390/en12040607
Liu H, Tan L, Huang X, Zhang M, Zhang Z, Li J. Power Stabilization based on Switching Control of Segmented Transmitting Coils for Multi Loads in Static-Dynamic Hybrid Wireless Charging System at Traffic Lights. Energies. 2019; 12(4):607. https://doi.org/10.3390/en12040607
Chicago/Turabian StyleLiu, Han, Linlin Tan, Xueliang Huang, Ming Zhang, Zhenxing Zhang, and Jiacheng Li. 2019. "Power Stabilization based on Switching Control of Segmented Transmitting Coils for Multi Loads in Static-Dynamic Hybrid Wireless Charging System at Traffic Lights" Energies 12, no. 4: 607. https://doi.org/10.3390/en12040607