Evaluation Model for the Scope of DC Interference Generated by Stray Currents in Light Rail Systems

Abstract
:
1. Introduction
2. Mathematical Model
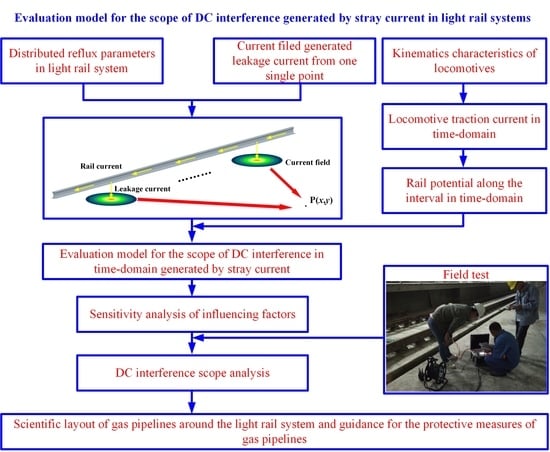
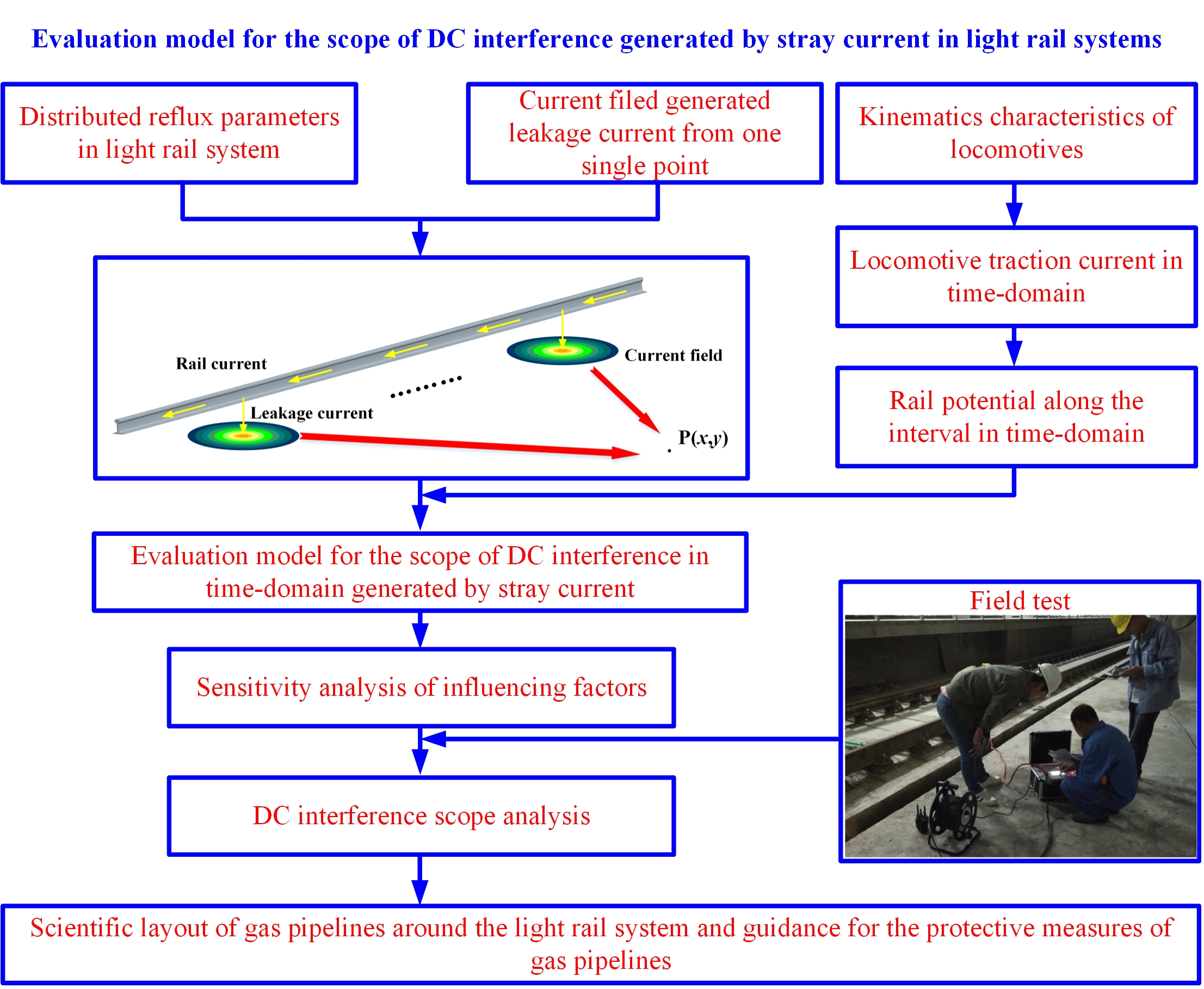
2.1. Research Background and an Overview of the Model
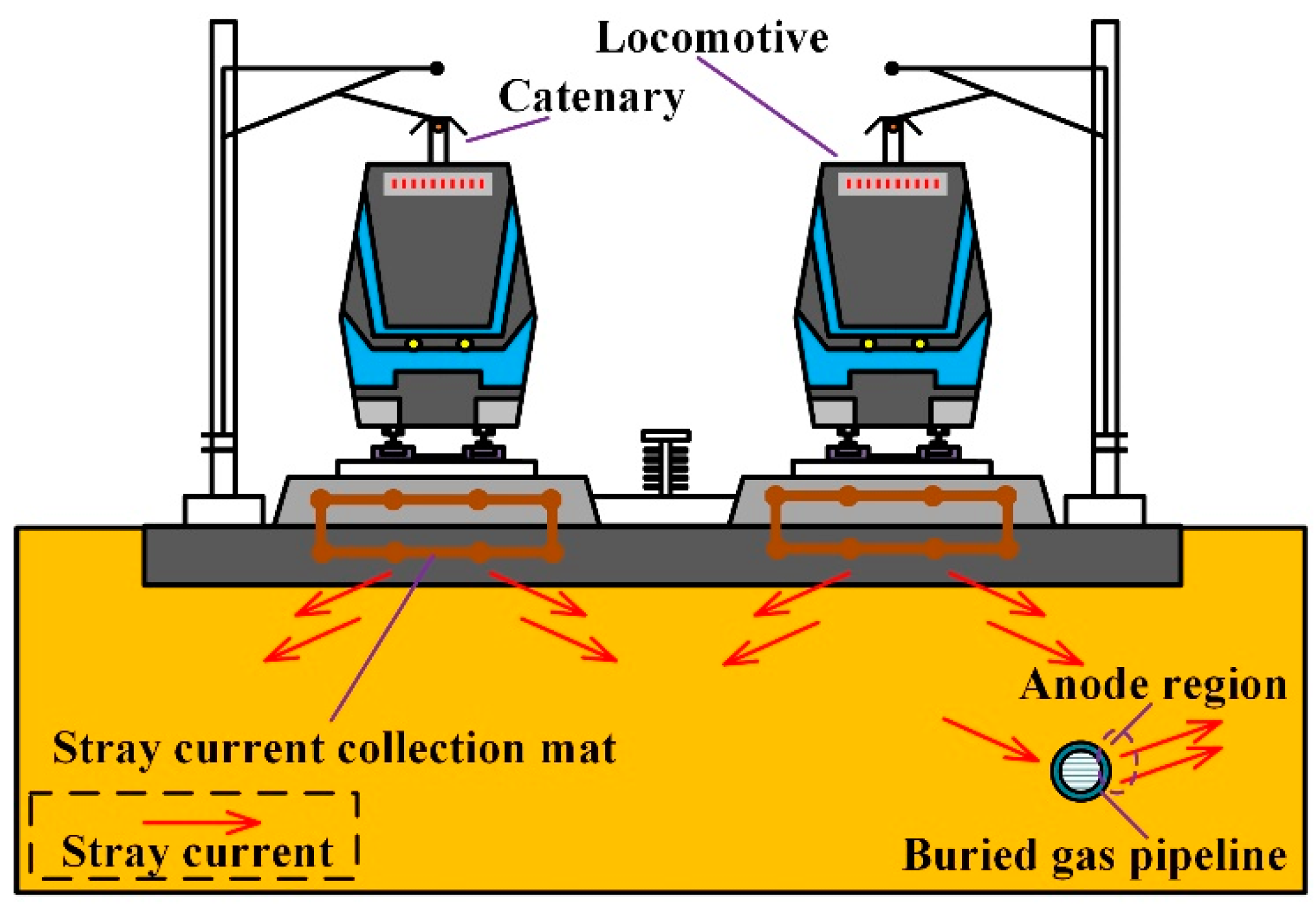
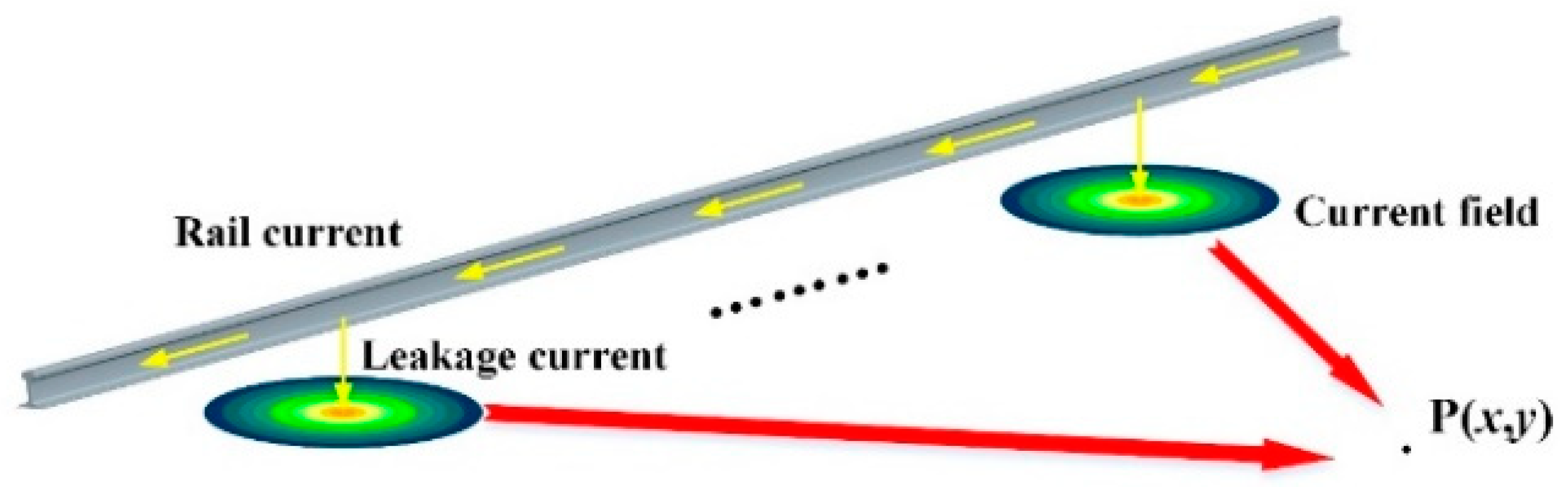
2.2. Earth Potential Generated by the Point Current Source
2.3. Surface Potential Gradient Near the Running Rail under the Stray Current Leakage
3. Exemplary Calculations
3.1. Calculation Parameters
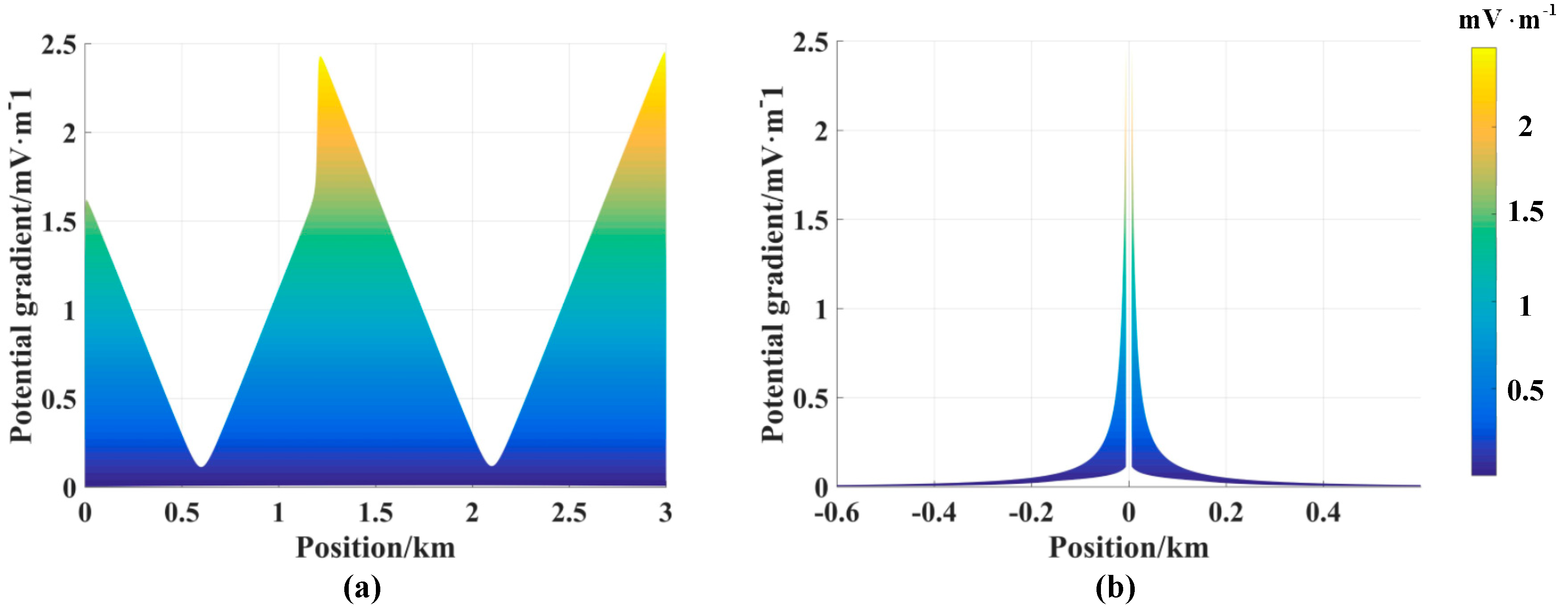
3.2. Surface Potential Gradient under the Bilateral Power Supply
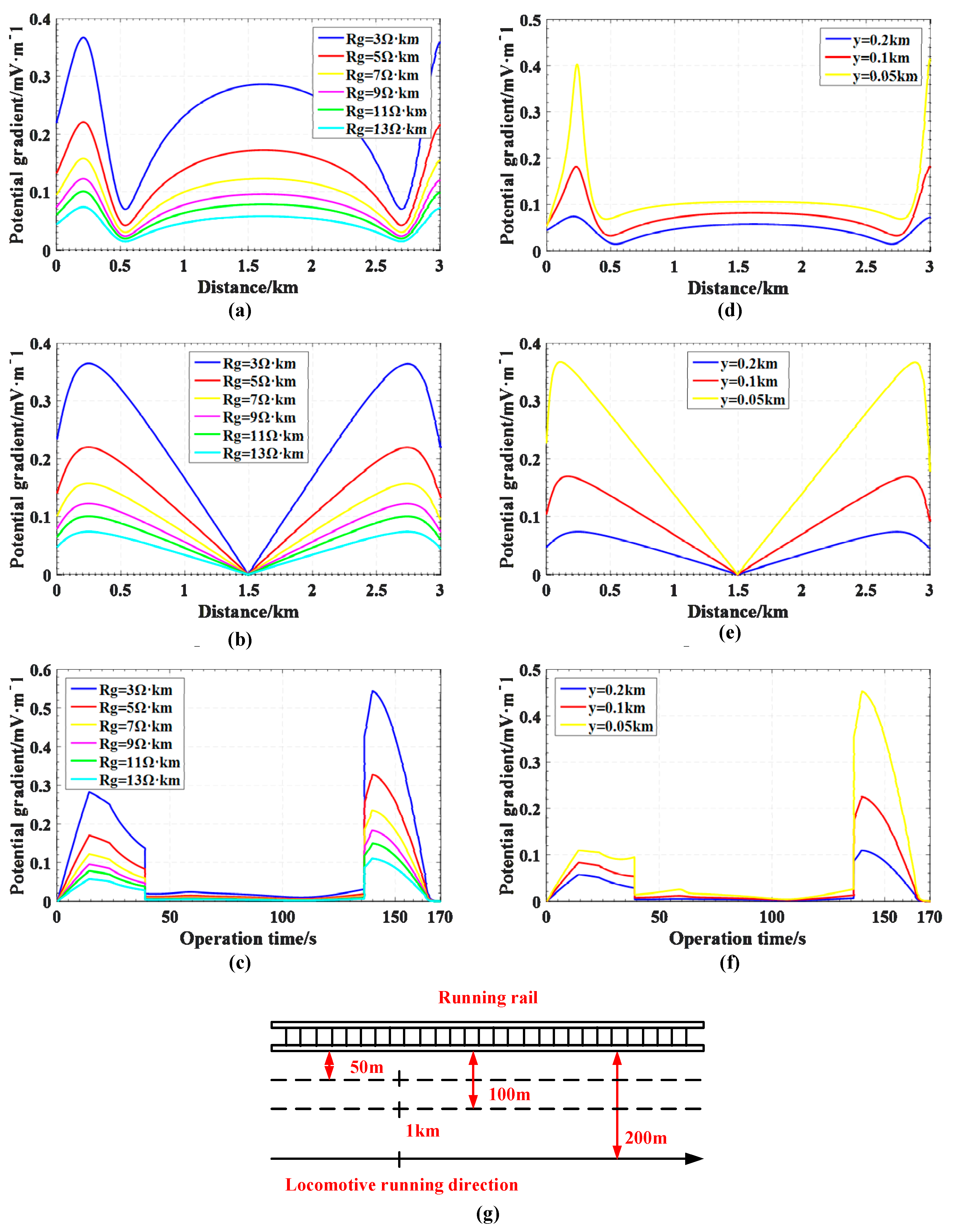
3.3. Impact Factors of the Surface Potential Gradient (Taking the Transition Resistance as an Example)
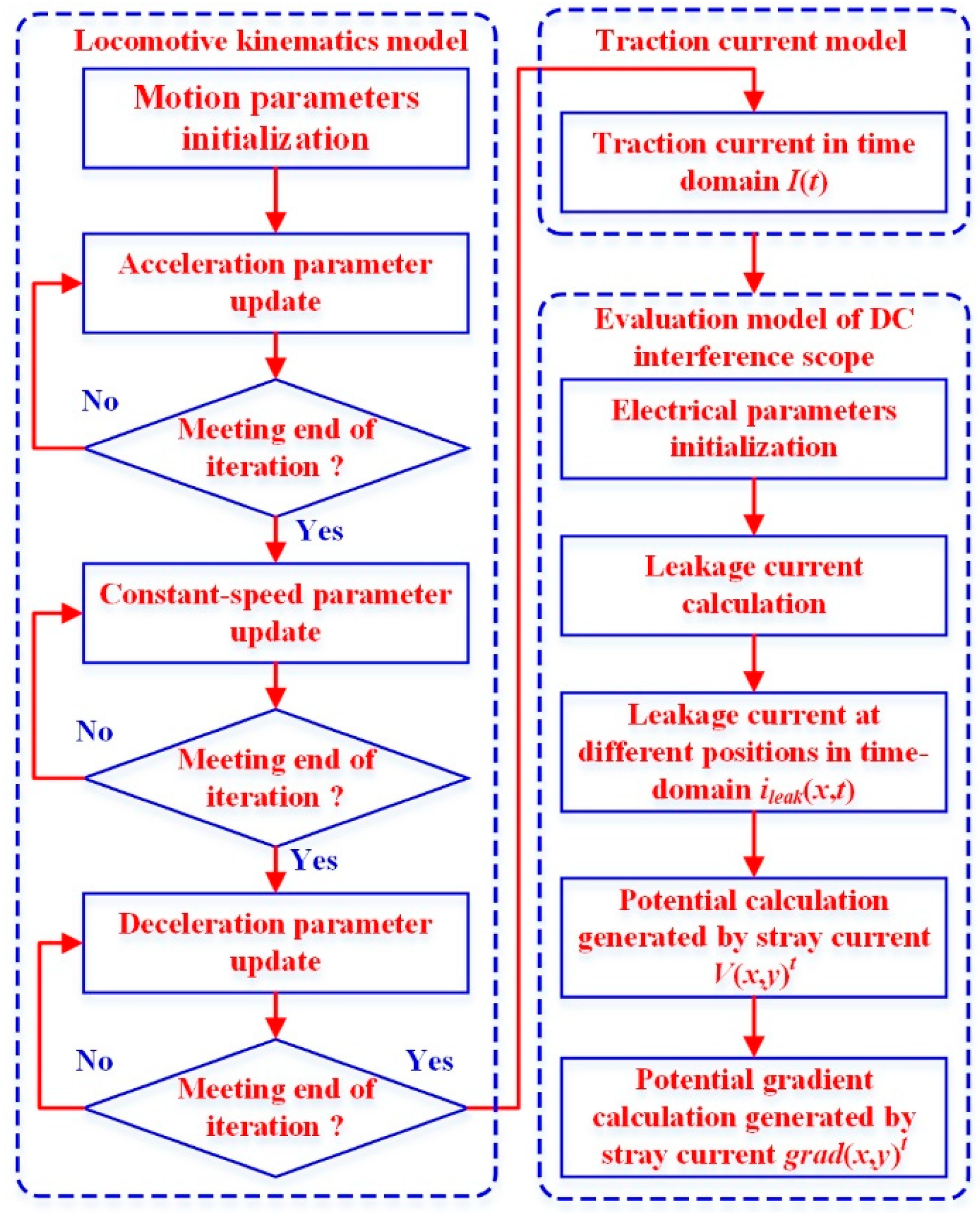
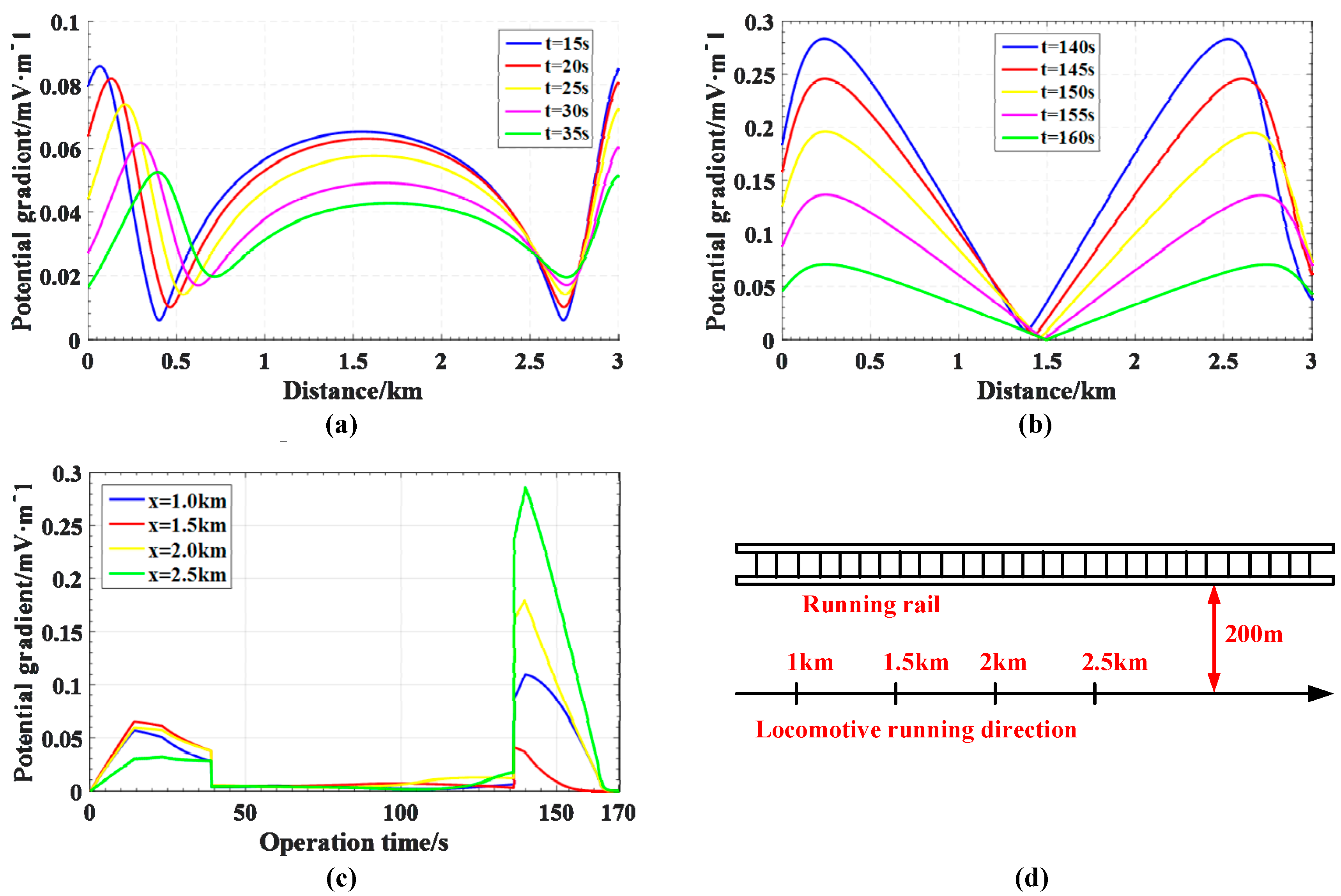
3.4. Dynamic Surface Potential Gradient Considering Locomotive Operation Modes
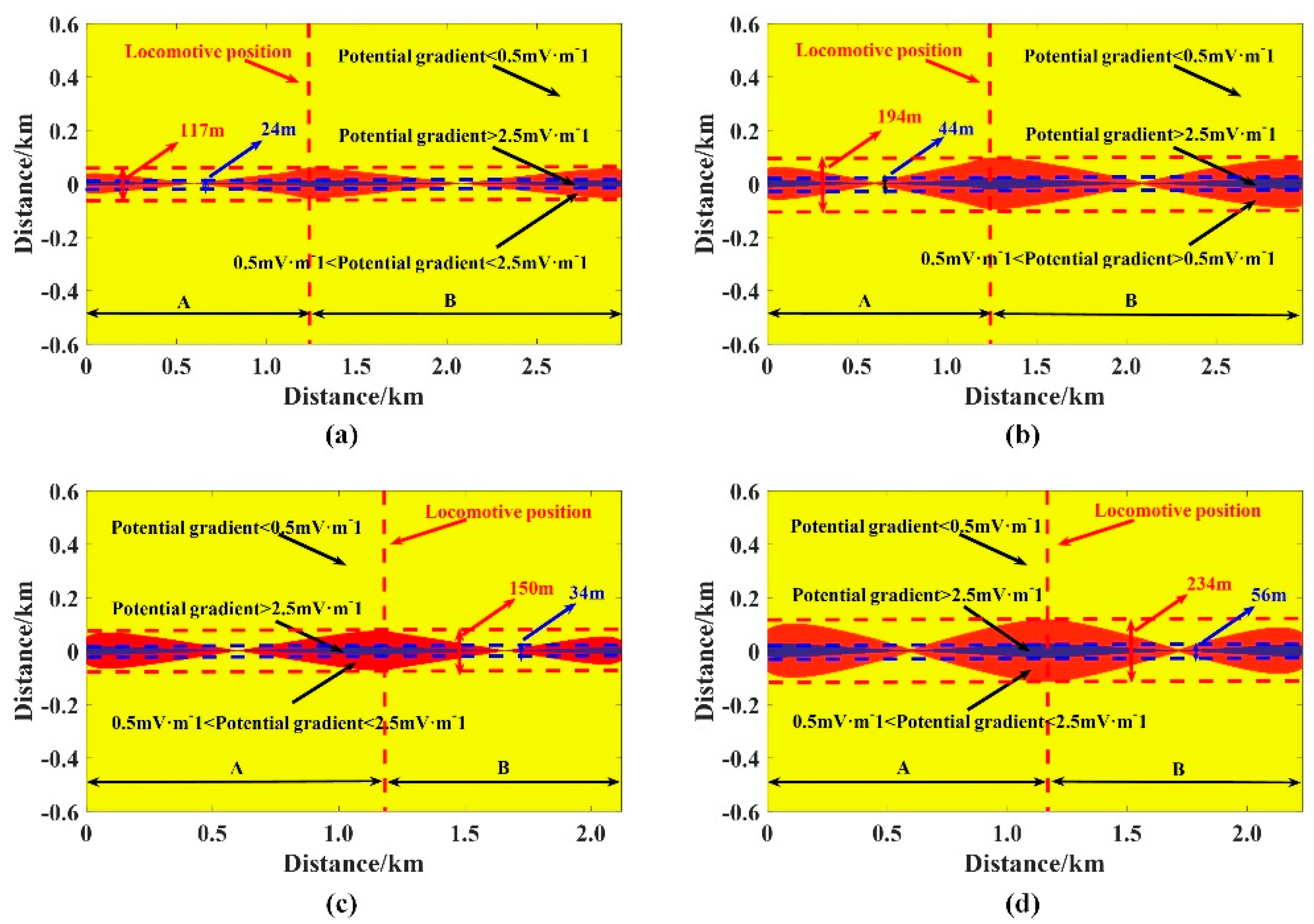
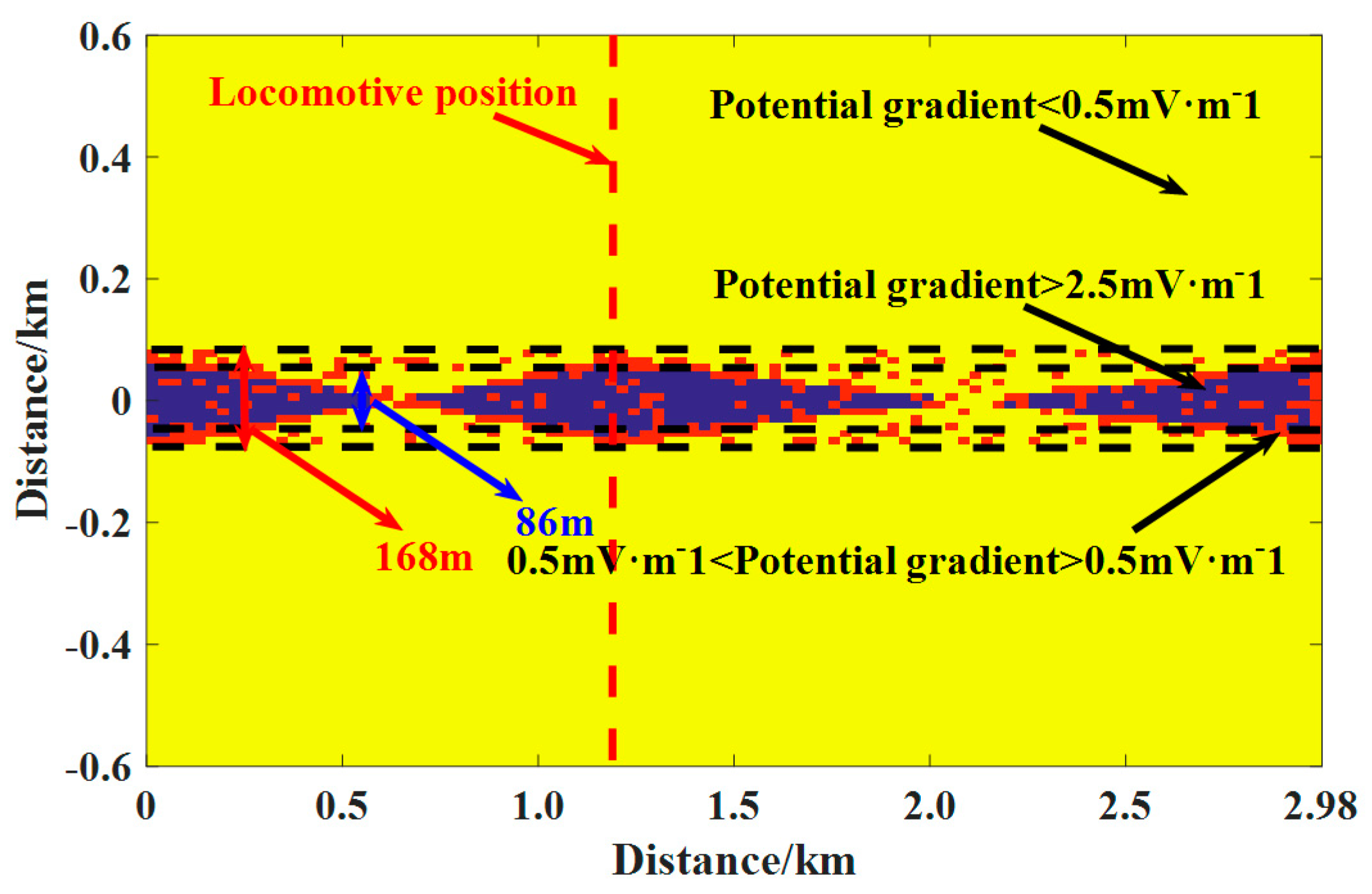
4. DC Interference Scope
5. Summary and Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Nomenclature
| h | Depth of the current source | ρ1, ρ2, …, ρn | Soil resistivity in different soil layers |
| h1, h2, …, hn | Thickness of different soil layers | H1, H2, …, Hn | Distance from different interface to the ground surface |
| I | Leakage current from a single current source | Rg | Transition resistance between running rail and earth |
| Rs | Rail longitudinal resistance | RR | Longitudinal resistance of the buried metallic pipeline |
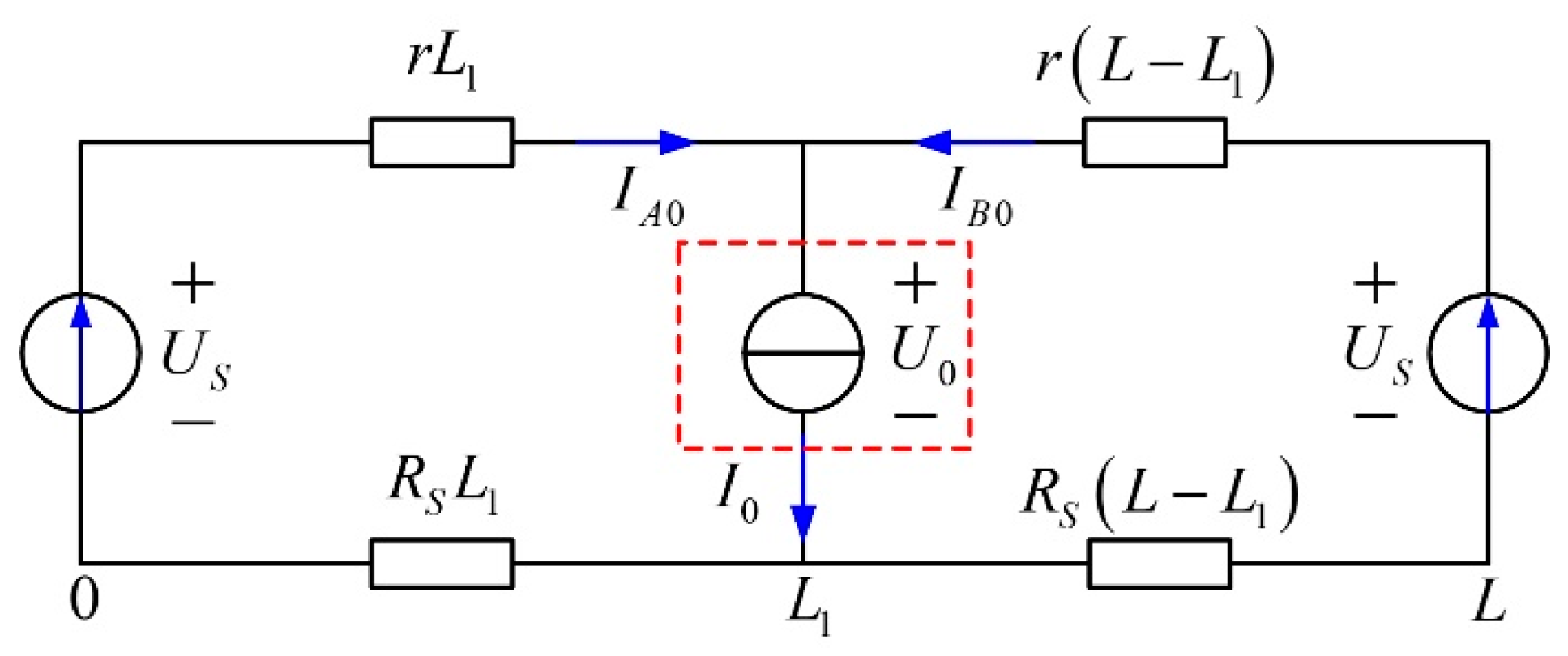
| ρ | Soil resistivity | I0 | Total traction current |
| L | Distance of the traction interval | L1 | Distance from the locomotive to the substation |
| grad(x,y) | Surface potential gradient generated by a single current source | V(x,y) | Surface potential generated by a single current source |
| IA0 | Traction current obtained from substation A | IB0 | Traction current obtained from substation B |
| US | Traction substation voltage | r | Resistance of catenary |
| P | Power of locomotive in light rail systems | Δt | Time interval in exemplary calculation |
| U(x,t) | Rail potential in operation time t | ileak(x,t) | Leakage current in operation time t |
| V(x,y)t | Surface potential in operation time t | grad(x,y)t | Surface potential gradient in operation time t |
| M | Molar mass of the metal | n | Valency |
| F | Faraday constant | t | Corrosion time |
| i | Current flowing out of the anode metal |
Appendix A
References
- Li, W.; Yan, X. Research on integrated monitoring and prevention system for stray current in metro. Int. J. Mining Sci. Technol. 2001, 11, 221–228. [Google Scholar]
- Chen, Z.; Koleva, D.; Breugel, K.V. A review on stray current-induced steel corrosion in infrastructure. Corros. Rev. 2017, 35, 397–423. [Google Scholar] [CrossRef]
- Xu, S.; Li, W.; Wang, Y. Effects of vehicle running mode on rail potential and stray current in dc mass transit systems. IEEE Trans. Veh. Technol. 2013, 62, 3569–3580. [Google Scholar]
- Charalambous, C.A.; Cotton, I. Influence of soil structures on corrosion performance of floating-DC transit systems. IET Electr. Power Appl. 2007, 1, 9–16. [Google Scholar] [CrossRef]
- Bertolini, L.; Carsana, M.; Pedeferri, P. Corrosion behavior of steel in concrete in the presence of stray current. Corros. Sci. 2006, 49, 1056–1068. [Google Scholar] [CrossRef]
- Du, G.; Zhang, D.; Li, G.; Wang, C.; Liu, W. Evaluation of rail potential based on power distribution in DC traction power systems. Energies 2016, 9, 729. [Google Scholar] [CrossRef]
- Hernández, F.C.R.; Plascencia, G.; Koch, K. Rail base corrosion problem for north American transit systems. Eng. Fail. Anal. 2009, 16, 281–294. [Google Scholar] [CrossRef]
- Qian, S.; Cheng, Y.F. Accelerated corrosion of pipeline steel and reduced cathodic protection effectiveness under direct current interference. Constr. Build. Mater. 2017, 148, 675–685. [Google Scholar] [CrossRef]
- Tang, K. Stray current induced corrosion of steel fibre reinforced concrete. Cem. Concr. Res. 2017, 100, 445–456. [Google Scholar] [CrossRef]
- Ogunsola, A.; Mariscotti, A.; Sandrolini, L. Estimation of Stray Current From a DC-Electrified Railway and Impressed Potential on a Buried Pipe. IEEE Trans. Power Deliv. 2012, 27, 2238–2246. [Google Scholar] [CrossRef]
- Lee, C.H.; Wang, H.M. Effects of grounding schemes on the rail potential and stray currents in Taipei rail transit systems. IEE Proc. Electr. Power Appl. 2002, 148, 148–154. [Google Scholar] [CrossRef]
- Yu, J.G. The effects of earthing strategies on rail potential and stray currents in DC transit railways. In Proceedings of the International Conference on Developments in Mass Transit Systems, London, UK, 20–23 April 1998; pp. 303–309. [Google Scholar]
- Barlo, T.J.; Zdunek, A.D. Stray Current Corrosion in Electrified Rail Systems—Final Report, May 1995. Available online: https://rosap.ntl.bts.gov/view/dot/13213 (accessed on 15 October 2018).
- Li, W. Corrosion mechanism of subway stray current. In Stray current Corrosion Monitoring and Protection Technology in DC Mass Transit Systems, 1st ed.; China Univ. Mining/Tchnol. Press: Xuzhou, China, 2004; pp. 58–61. ISBN 7-81070-968-2. [Google Scholar]
- Wang, C.; Li, W.; Wang, Y.; Xu, S.; Fan, M. Stray current distributing model in the subway system: A review and outlook. Int. J. Electrochem. Sci. 2018, 13, 1700–1727. [Google Scholar] [CrossRef]
- Inspection of Corrosion Protection of Buried Steel Pipe, GB/T 19285-2003. 2003. Available online: http://www.gb688.cn/bzgk/gb/newGbInfo?hcno=8ED4B83FA99F8B594D29E70B1094A45C (accessed on 15 October 2018).
- Protection against Corrosion by Stray Current from Direct Current Systems, BS EN50162. 2004. Available online: https://standards.globalspec.com/std/541637/bs-en-50162 (accessed on 15 October 2018).
- Railway Applications—Fixed Installations, Part 2: Protective Provisions against the Effects of Stray Currents Caused by d.c. Traction Systems, BS EN 50122. 2010. Available online: https://standards.globalspec.com/std/1300941/bs-en-50122-2 (accessed on 15 October 2018).
- Cathodic Protection of Metals Part 1: Pipes and Cables, AS 2832. 1: 2015. 2015. Available online: https://standards.globalspec.com/std/951952/saa-as-nzs-2832-1 (accessed on 15 October 2018).
- Control of External Corrosion on Underground or Submerged Metallic Piping Systems, NACE SP0169-2013. Available online: https://standards.globalspec.com/std/1651761/nace-sp0169 (accessed on 15 October 2018).
- Performing Close-Interval Potential Surveys and DC Surface Potential Gradient Surveys on Buried or Submerged Metallic Pipelines, NACE SP 0207-2007. 2007. Available online: https://standards.globalspec.com/std/1024153/nace-sp0207 (accessed on 15 October 2018).
- Machczynski, W.; Budnik, K.; Szymenderski, J. Assessment of d.c. traction stray currents effects on nearby pipelines. Compel Int. J. Comput. Math. Electr. 2016, 35, 1468–1477. [Google Scholar] [CrossRef]
- Pang, Y.; Li, Q.; Liu, W. A Metro’s stray current model based on electric field. Urban Mass Transit. 2008, 1, 27–31. (In Chinese) [Google Scholar]
- Charalambous, C.A.; Cotton, I.; Aylott, P.; Kokkinos, N.D. A holistic stray current assessment of bored tunnel sections of dc transit systems. IEEE Trans. Power Deliv. 2013, 28, 1048–1056. [Google Scholar] [CrossRef]
- Charalambous, C.A.; Cotton, I.; Aylott, P. Dynamic stray current evaluations on cut-and-cover sections of dc metro systems. IEEE Trans. Veh. Technol. 2014, 63, 3530–3538. [Google Scholar] [CrossRef]
- Brenna, M.; Dolara, A.; Leva, S.; Zaninelli, D. A simulation tool to predict the impact of soil topologies on coupling between a light rail system and buried third-party infrastructure. IEEE Trans. Veh. Technol. 2008, 57, 1404–1416. [Google Scholar]
- Jabbehdari, S.; Mariscotti, A. Distribution of stray current based on 3-Dimensional earth model. In Proceedings of the International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles IEEE, Aachen, Germany, 3–5 March 2015; pp. 1–6. [Google Scholar]
- Li, W. Distribution of stray current and its computer simulation. In Stray Current Corrosion Monitoring and Protection Technology in DC Mass Transit Systems, 1st ed.; China Univ. Mining/Tchnol. Press: Xuzhou, China, 2004; pp. 10–23. ISBN 7-81070-968-2. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value and Unit |
|---|---|
| Locomotive position | 1.2 km |
| Interval length | 3 km |
| Traction current (Static situation) | 2000 A |
| Rail longitudinal resistance | 0.026 Ω/km |
| Rail-to-Earth transition resistance | 15 Ω·km |
| Longitudinal resistance of the buried pipeline | 0.02 Ω/km |
| Soil resistivity | 37.74 Ω·m |
| Catenary resistance | 0.026 Ω/km |
| Traction substation voltage | 1500 V |
| Time interval Δt | 0.1 S |
| Traction interval | Rail-to-earth Transition Resistance (Ω/km) | Rail Longitudinal Resistance (Ω·km) | Soil Resistivity (Ω·m) |
|---|---|---|---|
| Interval I | 4.783 | 0.038 | 37.74 |
| Interval II | 2.896 | 0.056 | 22.35 |
| Interval III | 4.630 | 0.035 | 70.16 |
| Interval IV | 3.085 | 0.043 | 54.29 |
| Traction Interval | MSE of Rail-to-Earth Transition Resistance | MSE of Rail Longitudinal Resistance | MSE of Soil Resistivity |
|---|---|---|---|
| Interval I | 0.0165 | 9.1254 × 10−7 | 0.8780 |
| Interval II | 0.0031 | 5.7154 × 10−8 | 0.4572 |
| Interval III | 0.0028 | 3.2377 × 10−7 | 0.1163 |
| Interval IV | 0.0047 | 1.0861 × 10−5 | 0.2960 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Li, W.; Wang, Y.; Xu, S.; Li, K. Evaluation Model for the Scope of DC Interference Generated by Stray Currents in Light Rail Systems. Energies 2019, 12, 746. https://doi.org/10.3390/en12040746
Wang C, Li W, Wang Y, Xu S, Li K. Evaluation Model for the Scope of DC Interference Generated by Stray Currents in Light Rail Systems. Energies. 2019; 12(4):746. https://doi.org/10.3390/en12040746
Chicago/Turabian StyleWang, Chengtao, Wei Li, Yuqiao Wang, Shaoyi Xu, and Kunpeng Li. 2019. "Evaluation Model for the Scope of DC Interference Generated by Stray Currents in Light Rail Systems" Energies 12, no. 4: 746. https://doi.org/10.3390/en12040746
APA StyleWang, C., Li, W., Wang, Y., Xu, S., & Li, K. (2019). Evaluation Model for the Scope of DC Interference Generated by Stray Currents in Light Rail Systems. Energies, 12(4), 746. https://doi.org/10.3390/en12040746