2.1. Studies on Gas Turbines as Ship Propulsion Engines
Due to the relatively low thermal efficiency of gas turbines in comparison with Diesel engines, which are most usually installed on ships, heat recovery may be of utmost importance, in order for a system to be an economically viable alternative to Diesel engines. Furthermore, the high flow rate and temperature of the exhaust gases make gas turbines ideal for combined cycle systems.
In the present work, a novel approach of the SDO optimization problem, initially appearing in [
24] for the case of integrated ship energy systems with Diesel main engines is extended to the case of gas turbine systems, as it is considered that the utilization of gas turbines on ships is an important subject attracting a continuous research interest.
A thorough review of the possibility of using gas turbine-based combined cycles on merchant ships has been reported in the series of works [
36,
37,
38]. The possibility of using such systems in place of Diesel engines is investigated as a means of reducing pollutants emissions and their environmental and health impacts, while at the same time complying with more and more strict emission regulations. It is indicated that gas turbine combined cycles can very well satisfy these regulations. Furthermore, the benefits of lower volume and weight of these systems on commercial vessels is assessed as an extra motive for their utilization.
Altosole et al. [
39] a case study is conducted for the possibility of the application of a gas turbine-based combined cycle power plant instead of two-stroke Diesel engines on a large containership, after optimization for three different bottoming steam cycle designs. In addition to the benefits related to the overall weight and volume decrease of the machinery, a significant decrease in fuel consumption in comparison with the fuel consumption decrease achieved by bottoming cycles based on Diesel engines is reported.
A comparison between the thermodynamic performance of systems using gas turbines or low-speed Diesel engines with steam bottoming cycles is presented in Dzida [
40]. Performance data of commercially available engines of both types are used and it is concluded that both types of the overall systems can achieve comparable efficiencies with the employment of the steam bottoming cycle.
The majority of modern combined cycle applications employ variable geometry gas turbines for better partial load performance. The effects of variable geometry inlet guide vanes and the fuel feeding regulation on the thermal efficiency and the overall performance of the prime movers during partial load operation are studied in Hanglid [
41] for the cases of single-shaft and two-shaft marine gas turbines, while the efficiency of the overall system is studied in Hanglid [
42]. The results suggest that, even though the efficiency of the gas turbine itself tends to generally deteriorate, especially at low loads, the use of variable geometry gas turbines is evidently beneficial for the thermal efficiency of an appropriately designed combined cycle. Another possibility of variable geometry gas turbines studied specifically for use in marine applications appears in Wang et al. [
43], where the off-design performance of a marine gas turbine with compressor variable stator vanes is studied, and appropriate control strategies are proposed.
Other possibilities of integrating gas turbines with other technologies for marine applications have also been reported. Besides the utilization of water/steam in bottoming cycles, alternative waste heat cycles and configurations, possibly more suitable for ship applications, have been proposed, as for example in Sharma et l. [
44] and Hou et al. [
45], where supercritical CO
2 waste heat recovery cycles are proposed. Both studies suggest significant power enhancement and a very important increase of the thermal efficiency of the overall power plant. The improved partial load performance of such cycles is also highlighted [
45].
Wang et al. [
46], a system based on the waste heat recovery using both a standard steam bottoming cycle and an organic Rankine cycle operating in a cascaded way for the construction of a cogeneration system is studied in various operating conditions, and the improvements in comparison with a sole water/steam cycle are quantified.
Other works suggest the integration of gas turbines with fuel cells in energy systems of ships [
47]. In such systems, the waste heat of the exhaust gas is used to preheat the fuel used in the fuel cell to the required temperature of operation. Tse et al. [
48], a system combining fuel cell and gas turbine modules is extended with the use of absorption heat pumps for the production of cooling power, constructing a trigeneration or CCHP system studied for marine applications.
Apart from the cases where gas turbines are used in conjunction with steam bottoming cycles or other waste heat recovery configurations, studies have also appeared in which gas turbine configurations are used solely for the production of mechanical power in ship energy systems. Armellini et al. [
49,
50], a comparison is made between the alternatives of using (a) gas turbines as main engines, (b) Diesel engines with no pollution abatement, and (c) Diesel engines complemented with pollutant emission control devices (SCR, scrubber). These three different systems are simulated and optimized for the case of a cruise ship with the aim of maximizing the overall energy efficiency in several operating conditions, while the pollutants emissions are afterwards quantified. The results show that the employment of gas turbines leads to important environmental benefits, comparable with the alternative of using emission control devices in a Diesel engine-based system, while at the same time the complexity of the engine room is avoided.
Doulgeris et al. [
51], gas turbine-based systems are assessed as an alternative for installation on a RoPax fast ferry ship. Simple cycle and intercooled–recuperated configurations are studied. In the method presented, several technical, economic, and environmental parameters concerning the operation of the system during the whole life cycle of the ship are taken into account. The study reports the benefits of using intercooled–recuperated gas turbines in comparison with simple cycle configurations. De Leon et al. [
52], the development of a computer simulation framework is described which is used for assessing the differences of the thermodynamic efficiency and other performance characteristics of intercooled−recuperated, intercooled−reheated, and intercooled–reheated–recuperated configurations.
The need for enhanced performance characteristics throughout the whole operating power range of gas turbines used in marine applications, has led to the study of several advanced gas turbine thermodynamic cycles. The off-design operation and performance of an intercooled two-stage compression configuration is studied and optimized for certain operating states in Ji et al. [
53].
An important factor considering the possibility of employing gas turbines in the energy system of ships is the potential of using natural gas as a fuel. In the study presented in El-Gohary and Seddiek [
54] and further extended in El-Gohary and Ammar [
55], a comparison is made regarding the utilization of this type of fuel instead of diesel oil, demonstrating that the thermodynamic performance of the gas turbine operating on natural gas is very close to the case in which diesel oil is used, and that the natural gas can be thought of as a very appealing replacement for diesel oil, taking also into account the other advantages related to the economic and environmental benefits.
Natural gas is ideal for gas turbines and, as a consequence, gas turbines are very good candidates for LNG carriers, where they operate on the boil off gas. A technoeconomic study is presented in El-Gohary [
56], where the potential economic benefits of using a gas turbine-based power plant burning LNG instead of reciprocating engines operating on HFO are demonstrated. The possibilities of using combined cycles for power plants of LNG carriers are also examined in Fernández et al. [
57], where alternative configurations are proposed as potential solutions for the overall energy system.
In this section, the SDOO of an integrated energy system of ship comprising gas turbines and the possibility of combined cycle is performed. In contrast with the works presented in Dimopoulos et al. [
21,
22], where the solution is obtained with a two-level approach (level A for synthesis and design and level B for operation), as described in the preceding, a unified approach for the solution of the complete SDOO problem is applied. The general method and the pertaining mathematical formulation are presented in detail in Sakalis and Frangopoulos [
24], where a generic type of main engines is considered.
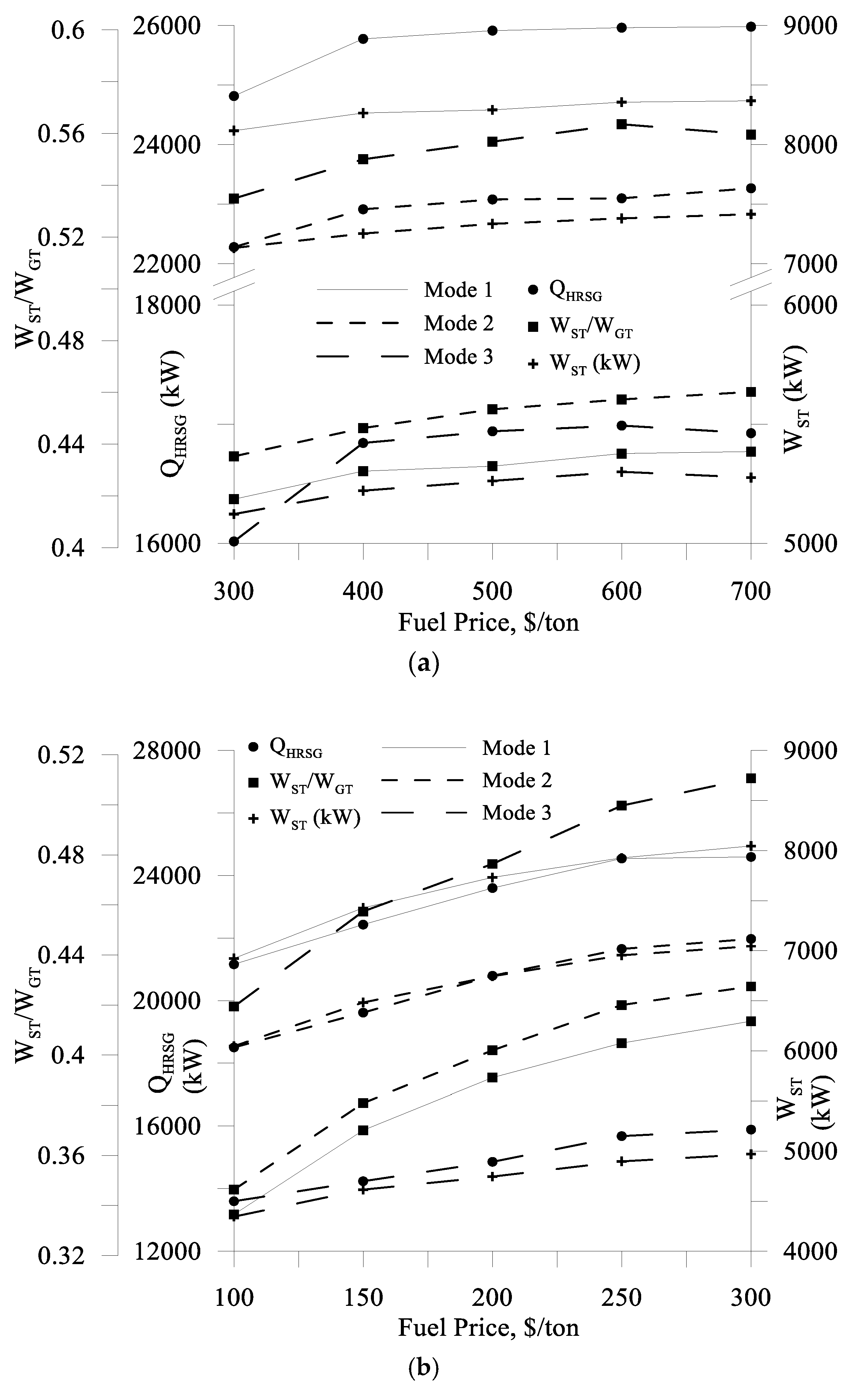
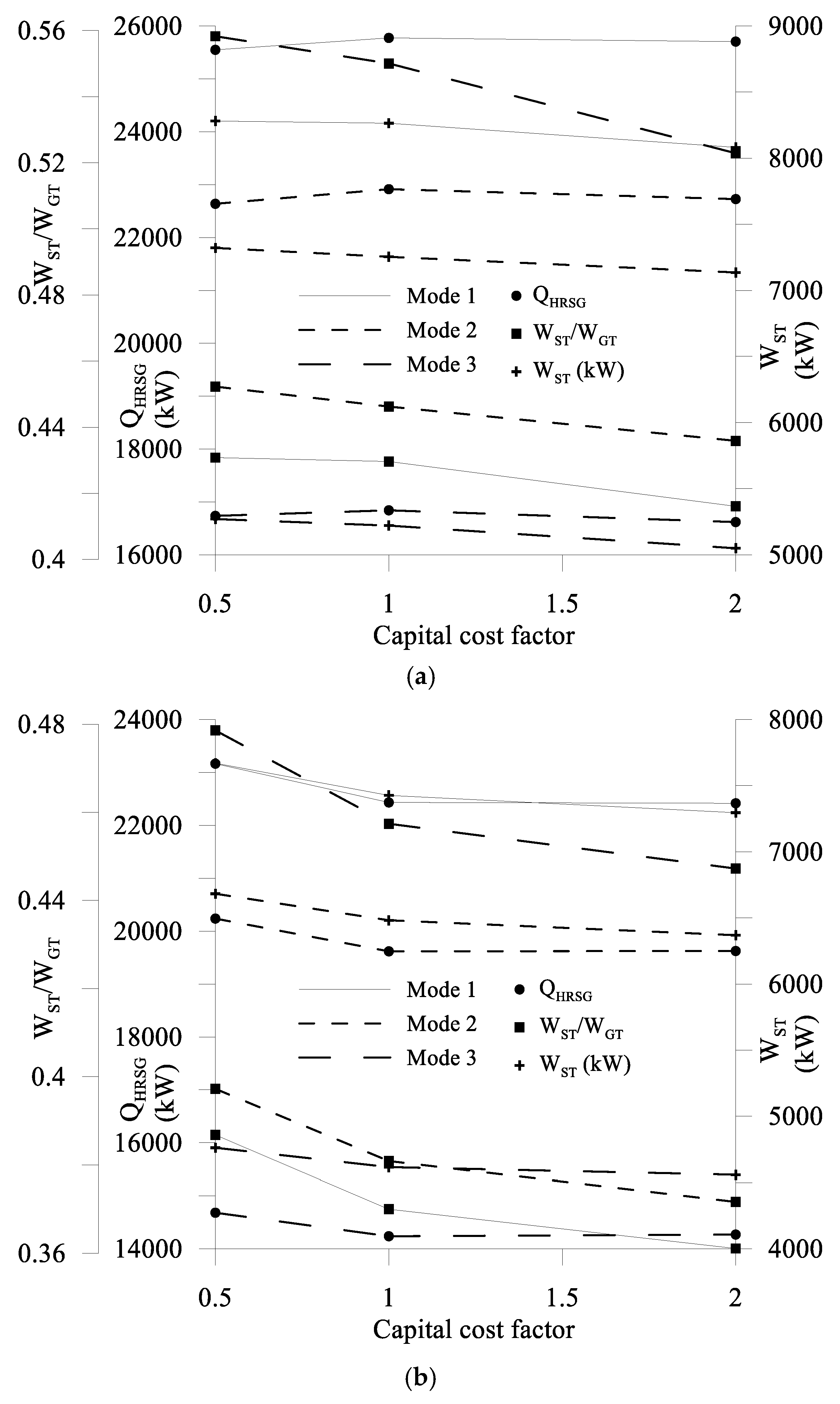
The SDOO problem is initially formulated and solved considering three different types of gas turbine configurations and two types of fuels. Afterwards, the effects that the fuel price and the capital cost have on the optimal solutions for the best performing gas turbine configuration are studied.
It has to be noted that for the present application, the system is considered to be operating in static conditions. This means that the energy profile of the ship is assumed to be adequately approximated by considering a predetermined number of operating modes, which also are characterized by predetermined magnitudes of the loads to be covered and their respective duration during a typical year of ship operation.
2.2. Description of the System and Formulation of The Optimization Problem
The system is used for covering the demands for propulsion (
), electrical (
) and thermal power (
), during different operating modes of a ship. The number of the operating modes is considered predetermined and equal to
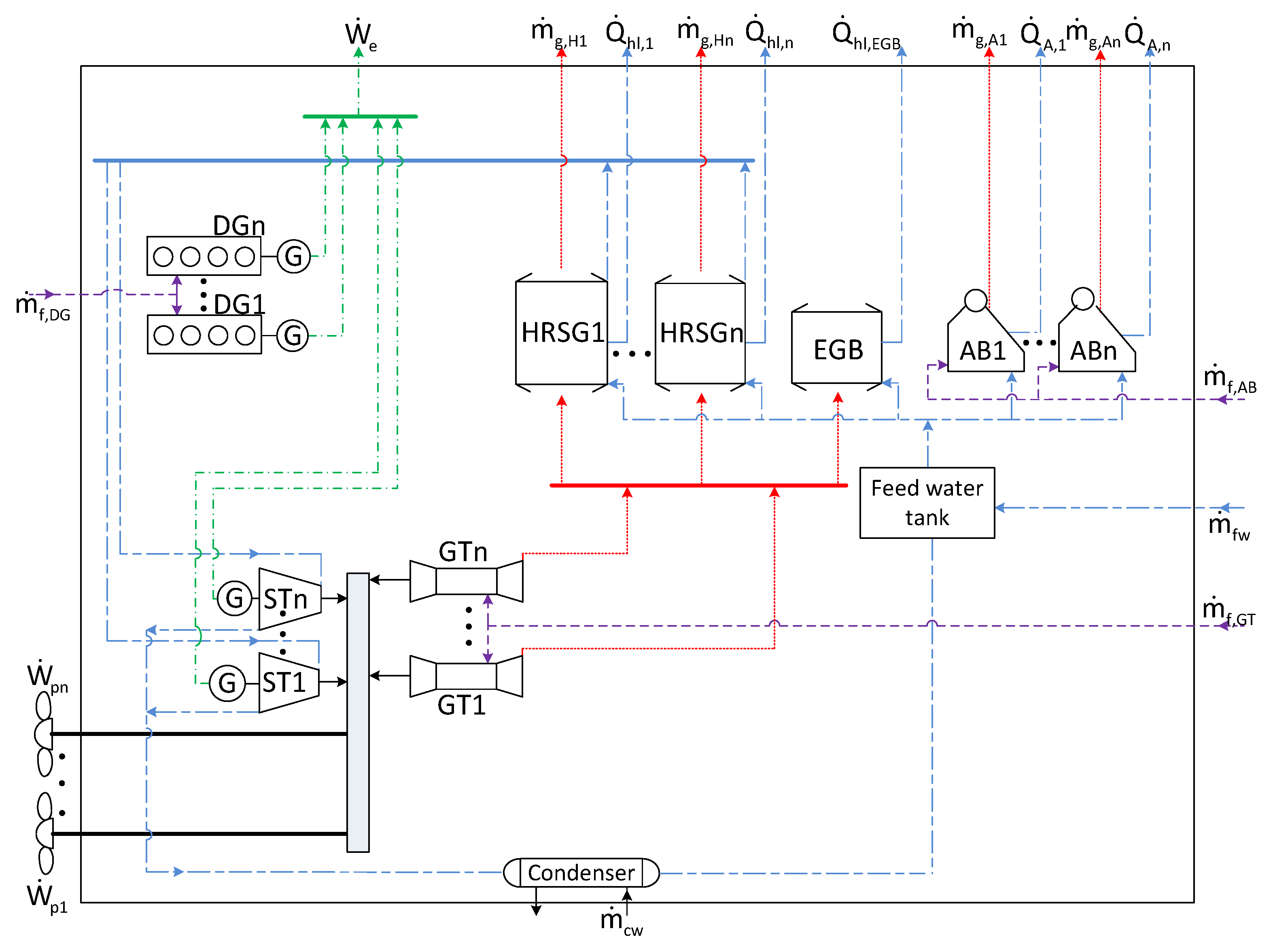
NT. The superconfiguration of the system considered is presented in
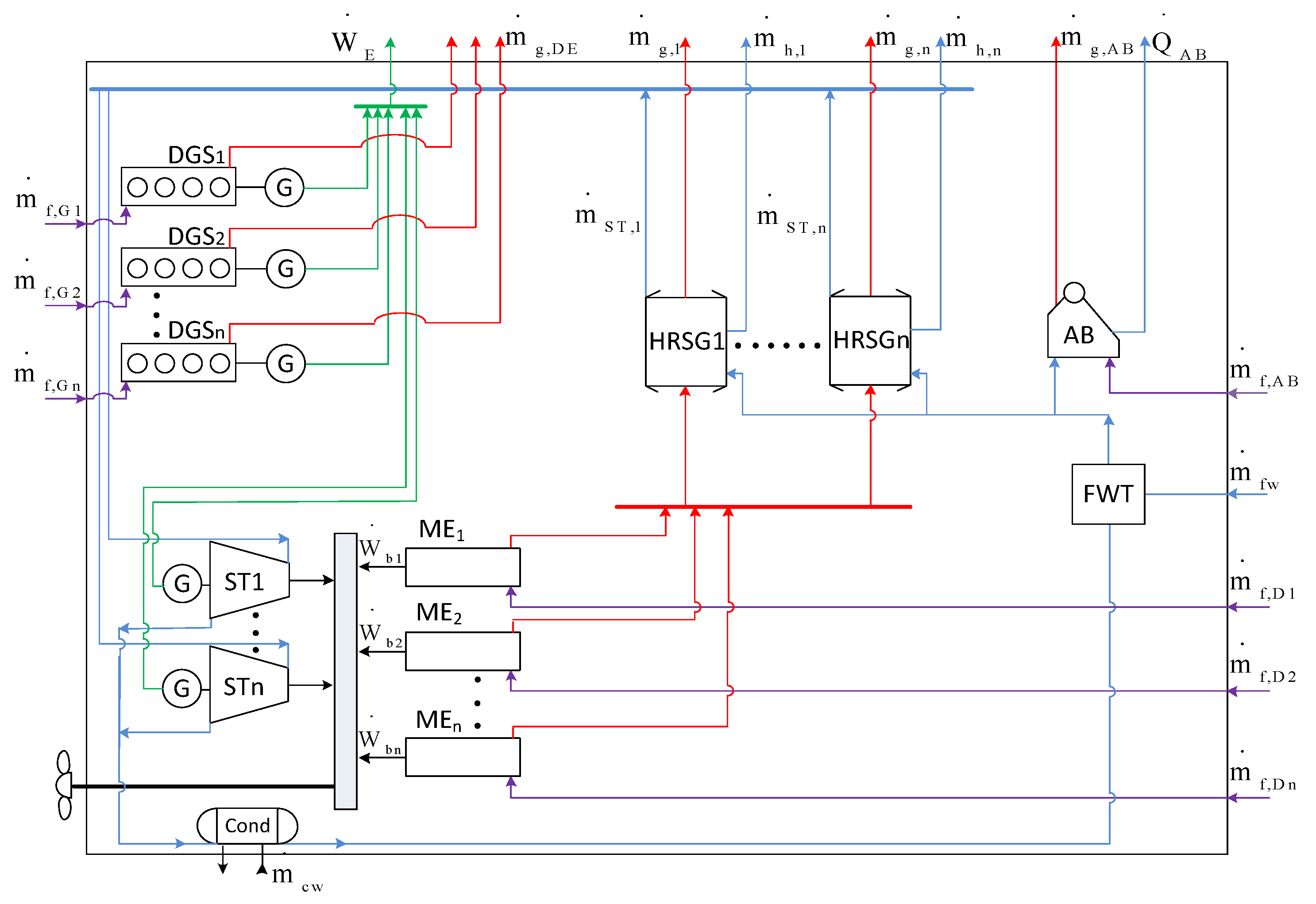
Figure 2.
The gas turbines (GT) are coupled to the propellers by means of a speed reducing gearbox. The exhaust gases of the gas turbines are fed into heat recovery steam generators which produce superheated steam at two pressure levels and saturated steam for potentially covering thermal loads. The superheated steam drives steam turbines; their power outputs can be fed to the propeller and/or to electric generators. The proper allocation of the steam turbine power between the propulsion and the electrical loads is among the results of optimization.
Provision is taken for the possibility that the employment of a steam bottoming cycle may not be an optimal solution. For this reason, the potential inclusion of Diesel generator sets (DG) and fuel fed auxiliary boilers for covering the electrical and thermal loads is considered, which will cover electric and thermal loads also in port, where the main engines and, consequently, the bottoming cycle, do not operate. In any case, the proper allocation of the energy loads among the bottoming cycle components and the independently operating components (that is, the Diesel generator sets and the auxiliary boilers) is to be determined by the optimization procedure. An exhaust gas boiler (EGB) may also be included in the system for covering thermal loads when the exhaust gas flows are not exploited in heat recovery steam generators (HRSGs).
The steam is produced in the existing HRSGs at common pressure levels and it is delivered to collectors, one for each pressure level (only one collector is depicted in
Figure 2 for simplicity).
In
Figure 2, the dots among components imply that the final number of each type of component present will be decided by the optimization procedure.
Overall, the number of each type of components present in the system and the physical and functional interconnections between them, as also their design characteristics and operating point at each instant of time will collectively be determined by the solution of the optimization problem.
The minimization of the present worth cost (
PWC) of building and operating the energy system for a predetermined number of years is selected as the optimization objective:
In Equation (1), the 1st line includes the capital costs of the components, the 2nd line consists of the fuel costs, and the 3rd line consists of the operating and maintenance costs.
The simulation procedure of the system as a whole is carried out with the purpose of calculating the value of the objective function, which expresses the complete SDOO problem, in a single computational step. In this simulation procedure, proper variables (that are to be used as independent variables of the optimization problem) determine the number of operating components during each operating mode and their proper functional interconnections among them in order for the loads to be covered. This modeling procedure is presented in Sakalis and Frangopoulos [
24] and is briefly repeated in the present section for convenience, while the details of the modeling procedure of certain individual components are presented in
Section 2.3 and in the aforementioned publication.
For the problem formulation, the operating profile of the energy system is represented (with an acceptable degree of approximation) by a number NT of modes, during which steady state operation is assumed. Each mode y (y = 1, 2, …, NT) has a predetermined duration ty. During each operating mode, the energy demands for propulsion (), electricity (), and heat () are also predetermined and have constant values.
The power balance equations are valid at each instance of time:
In Equations (2)–(4), the
ni (
i = GT, ST,DC,HRSG,AB) symbols represent the number of operating components according to their type during mode
y,
is the power delivered by gas turbine
x to the propeller (
),
is the propulsion power part of steam turbine
(
),
is the output of Diesel generator set
x (
),
is the electrical power part delivered by steam turbine generator
,
is the thermal power covered by the HRSG
z to thermal loads
, and
is the output of auxiliary boiler
u (
). Due to the fact that the propulsion power may be partially covered by steam turbines, the total power delivered by the gas turbines can be lower than the total power required, and thus it holds that
The power output of each of the operating
nGT,y engines during mode
y is calculated as follows
The maximum of the values of
among all operating modes
y will also determine the final number of main engines that will be present in the system:
The nominal power of each main engine is temporarily set as
The nominal power of the main engines on ships is usually slightly oversized (sea margin), in order for the upcoming hull and propeller fouling effects to be counteracted appropriately, as also for the conditions that the ship may operate in adverse weather conditions. In a gas turbine combined cycle, the steam turbine power production is expected to be, in general, much higher than in the case of combined cycle based on Diesel engines, due to the favorable exhaust gas characteristics. By an appropriate design of the bottoming cycle, it is thus possible that the steam turbine may have quite a significant contribution to the propulsion load, affecting, in this way, the appropriate (optimal) operational and nominal characteristics of the gas turbines. The need for sea margin is considered in the determination of the nominal power output of the system in the following way.
Among the operational modes, one will present the highest propulsion load, which is symbolized with
. The sea margin excess power requirement is herein expressed with Equation (11), which relates the sum of the nominal power rating of the operating gas turbines and the sum of steam turbine propulsion powers symbolized with
.
where the index
ml implies the aforementioned operating mode in which
appears and
is the sea margin factor, usually taken equal to 0.85.
For the sum of the steam turbine propulsion powers in mode
ml, the following equation must hold.
where
is the fraction of propulsion power
delivered by the gas turbines and is an independent variable of the optimization problem. If the characteristics of the steam produced cannot result in an
sufficient for covering
, then the candidate solution is discarded by the optimization procedure as nonfeasible.
Equations (11) and (12) lead to inequality (13), which expresses the requirement for the sum of nominal power ratings of the gas turbines:
If inequality (13) does not hold, the values of are proportionally increased until (13) holds as an equality, and the temporary values are obtained.
The nominal power rating for each gas turbine
x is finally determined by the equation
The fuel consumption
and exhaust gas properties (mass flow rate
and temperature
) of each of the main engines can afterwards be calculated (as the nominal power rating and partial load brake powers are already determined) for each mode by applying the computational simulation procedures of gas turbines described in
Section 2.3.
In each operating mode
y, the exhaust gas inlet in the HRSG
z is determined according to
where each
gx,y variable refers to gas turbine
x and denotes the number of the HRSG towards which its exhaust gas is driven.
The nominal mass flow rate
and temperature
, for which the HRSG
z is designed, are calculated as
where
and
are intended to be used as independent optimization variables.
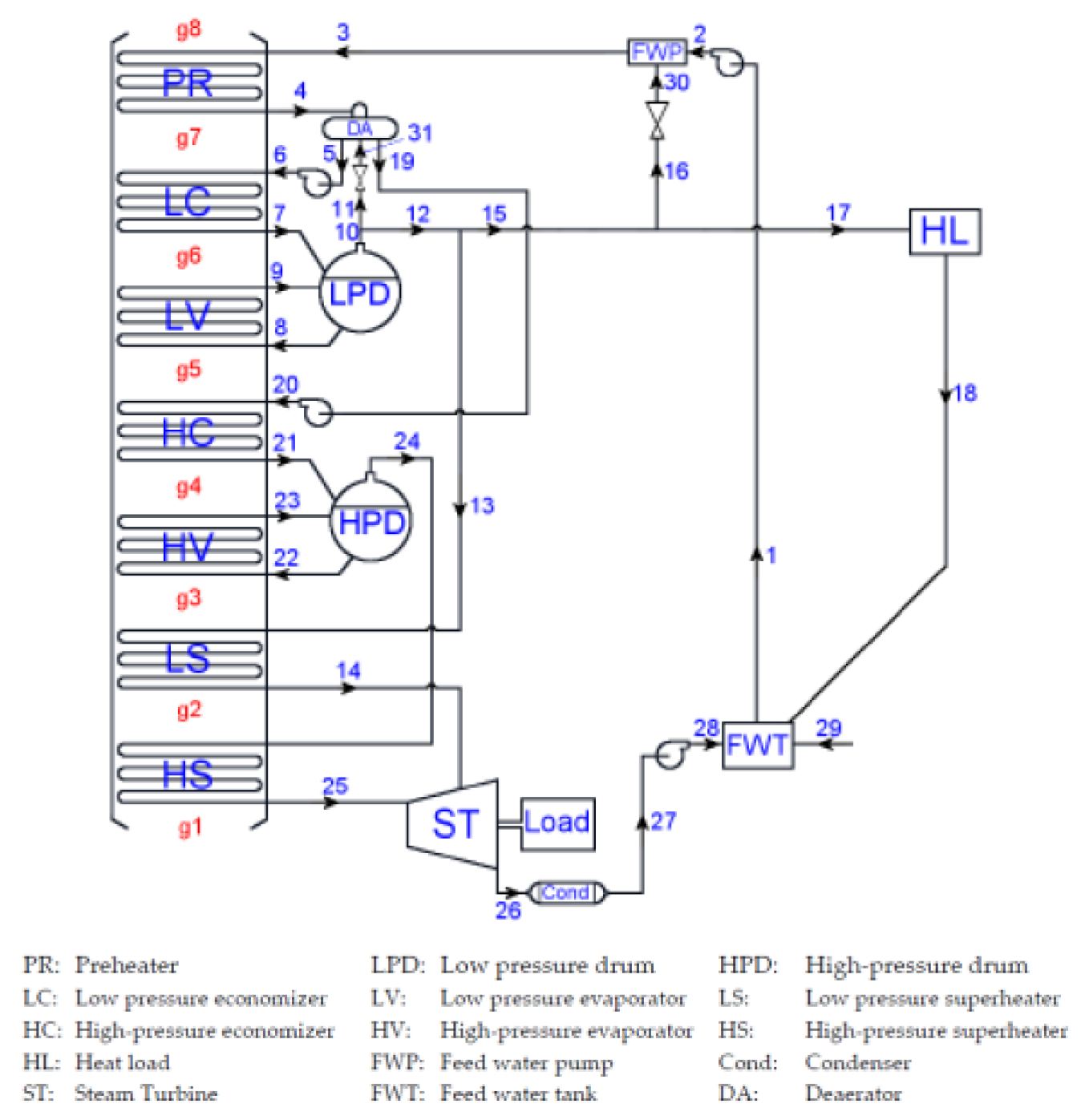
The bottoming cycle operates at two pressure levels—PHP and PLP—common among the HRSGs. In nominal conditions of operation for HRSG z, during which the exhaust gas characteristics are determined by Equations (16) and (17), the steam produced in the two pressure levels for feeding the turbines will have mass flow rates , , and temperatures and .
The HRSGs are of double-pressure and the nominal values of
PHP,
PLP,
,
,
, and
for HRSG
z are to be used as inputs for simulating the integrated energy system. With values for these variables set, the design procedure described in
Section 2.3.2 can be initiated for each HRSG. The design procedure is used for the determination of the heat exchange areas throughout the HRSG and with these areas determined, the off-design operation properties of steam (that is, mass flow rates
and
and temperatures
and
) can also be calculated.
The total mass flow rates and , in each steam collector, before feeding the turbines, are readily calculated with mass balances, and the respective temperatures and after stream mixing is determined by energy balances.
For the determination of the steam mass flow rate delivered to each turbine, the following equations hold (for the high-pressure level).
where
represents the number of steam turbines that operate during mode
y.
The mas flow rate
and temperature
for the design of steam turbine v are calculated as
Similar equations are used for the low pressure level. During design point operation, the pressure levels at the steam turbine inlets are the same with the ones of HRSGs.
With the values of intensive and extensive thermodynamic properties of the steam feeding the steam turbines at the regarded as design point operation, the steam turbine design procedure described in detail in Sakalis and Frangopoulos [
24], is applied, the design power production is calculated, and off-design power assessment can also be carried out.
The power
produced by steam turbine
v is allocated between propulsion and electrical loads during each mode
y. The following equation must hold for the propulsion parts.
If during mode
y the number of operating steam turbines
is higher than one, their total propulsion power is allocated among them in proportion to the total power output of each one:
The total electrical power produced by the steam turbine generators, is calculated as the power that remains (if any) after the covering of the propulsion load:
The total power delivered by the Diesel generator sets
is readily calculated with the following equation, in case that total electrical power delivered by the steam turbines is not sufficient to cover the loads:
In Equation (26), is the total electric load during mode y.
During mode
y,
Diesel generator sets will be operating. If
, the power delivered by each Diesel generator set
x,
, will be calculated with the following equations.
Variables are used for the determination of the nominal power rating of the Diesel generator x, similarly to the case of main engines.
The thermal load during mode y is allocated between the HRSGs and the auxiliary boiler as follows
The
is allocated among the HRSGs accordingly:
The EGB, which may be included, is employed only in cases in which exhaust gas is available from any engine because it is not exploited for the production of superheated steam (due to technical reasons or because this could be dictated by an optimal solution), so that its heat content can be used for covering thermal loads only.
Equations (2)–(34) are a closed form set of equations which is used for the determination of the number of operating components as well as heir functional interconnections that should exist in order for the energy system to fulfill its purpose. This number and the functional interconnections may be different among different operating modes. The final synthesis of the system is thus dependent on the “temporary” syntheses during each mode. Furthermore, the component design characteristics are determined in a procedure that takes into account the different values of the loads to be covered during all of the operating modes.
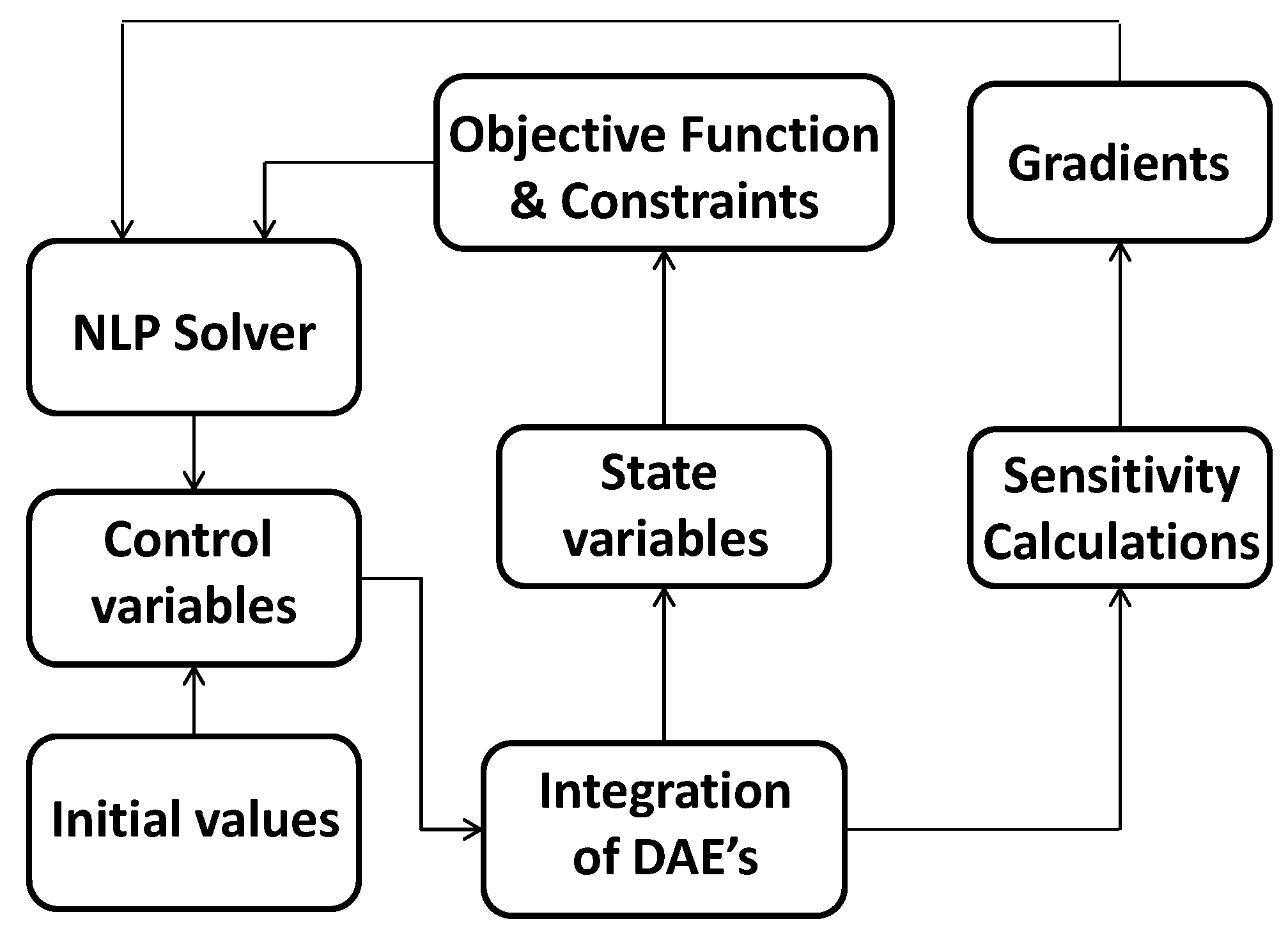
Generally, the inputs to the model of the overall system are intended to be used as independent variables of the optimization problem, which are collectively reported in
Table 1. The optimization problem formulated is of the mixed integer nonlinear programing type and is solved with the use of genetic algorithms (the number of variables for voyage operating modes is N
T − 1, while number N
T is reserved for harbor operating mode).
More details concerning the nature of the independent variables and the mathematical form of the objective function, as well as the tuning parameters and the application of the genetic algorithm can be found in Sakalis and Frangopoulos [
24].



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








