Studies of Energy Consumption by a City Bus Powered by a Hybrid Energy Storage System in Variable Road Conditions


Abstract
:1. Introduction
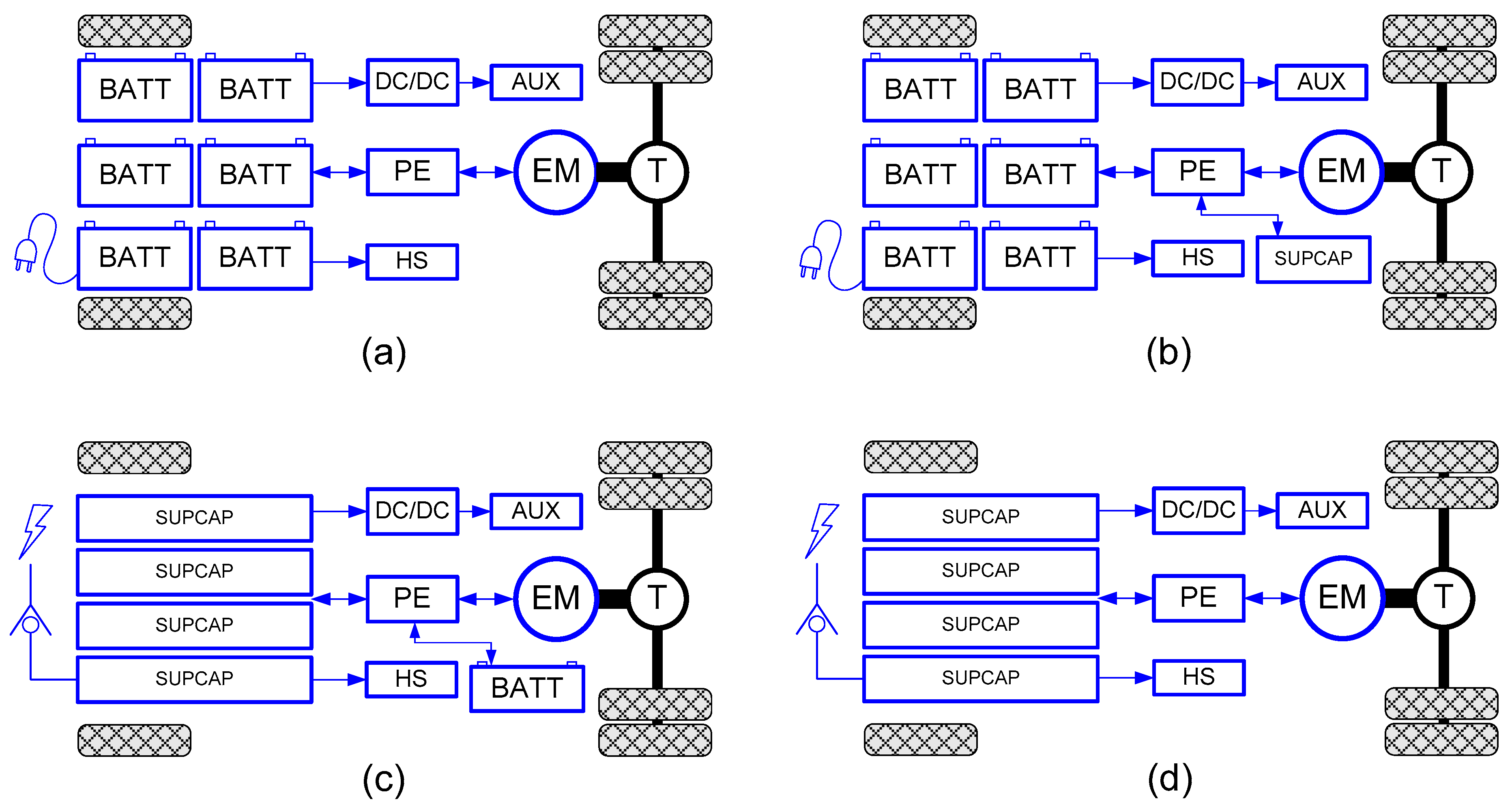
2. Energy Storage System Configuration
3. Modeling
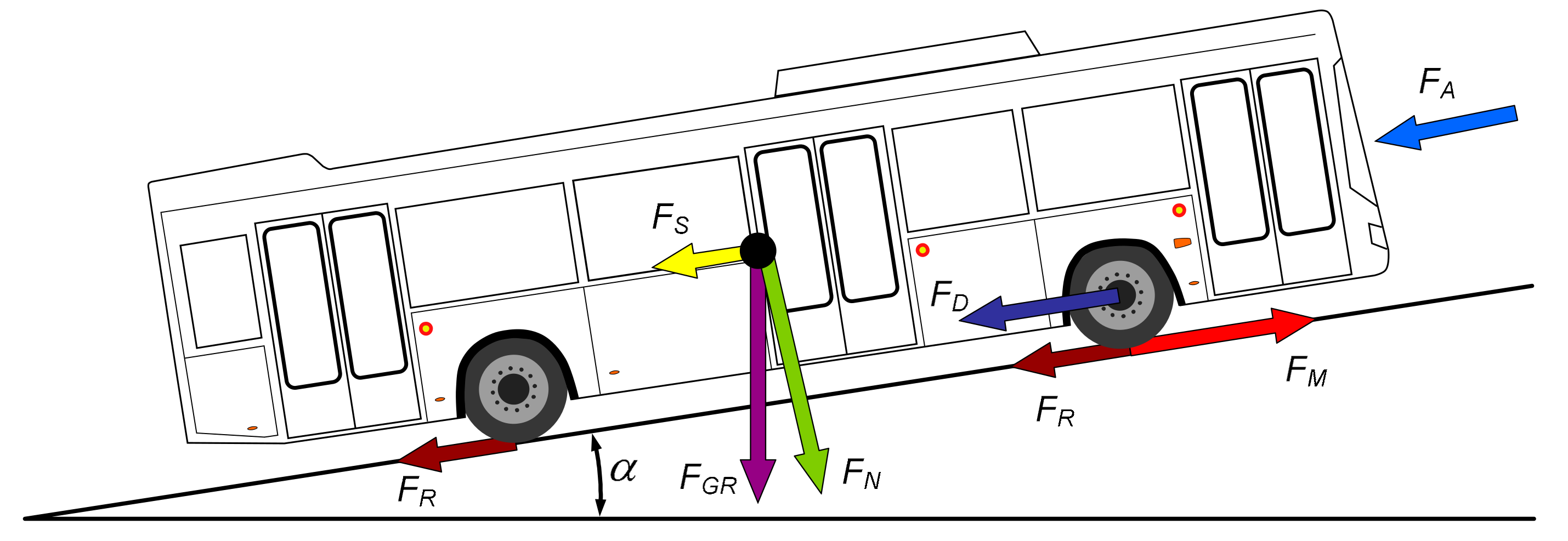
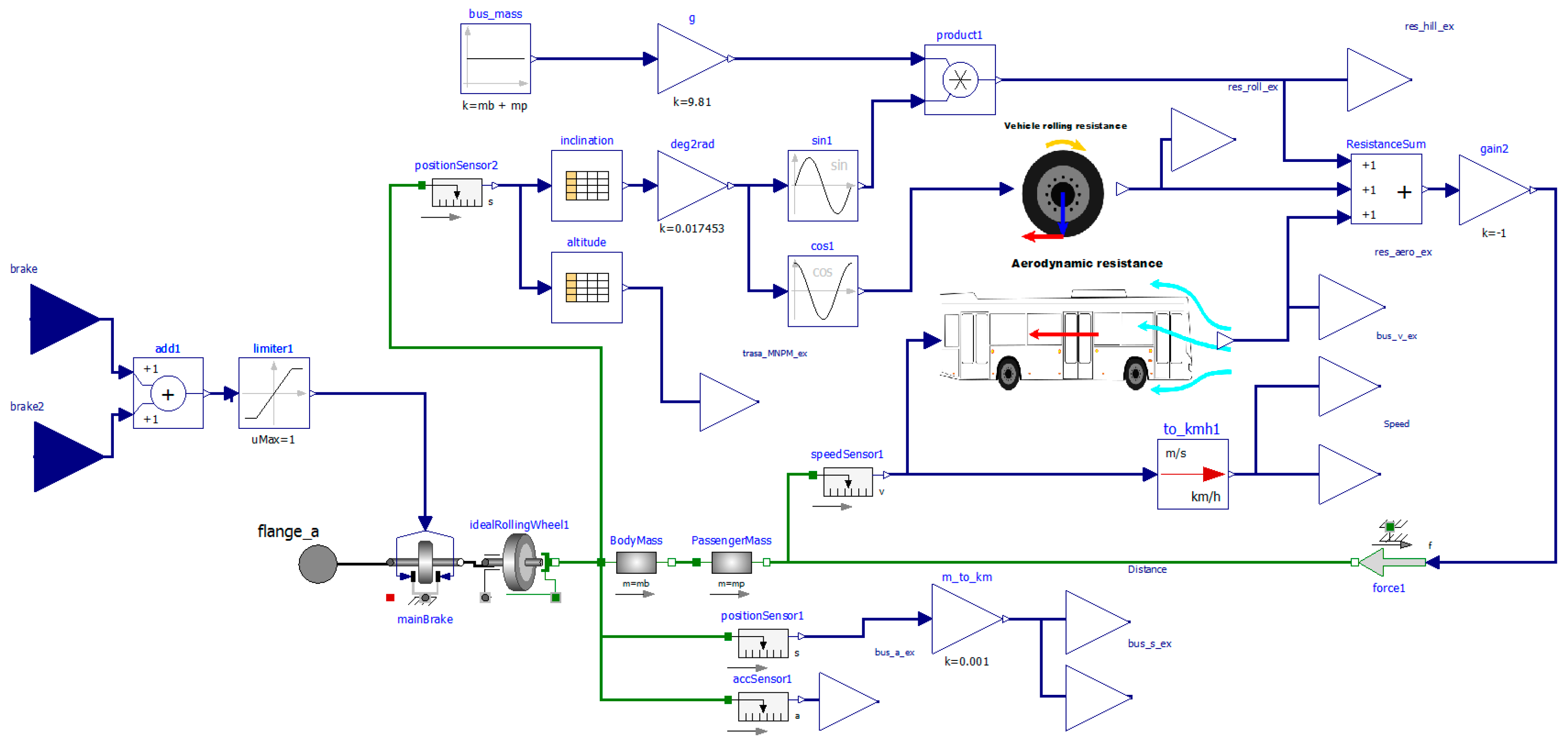
- The body of the vehicle together with the forces acting on it;
- Electric drive system consisting of a synchronous motor module, an inverter module, and an electric energy storage module;
- Power transmission system with differential;
- Vehicle route referencing module, including support and control of acceleration and braking pedals;
- Module for setting temperature parameters of the external environment;
- Module for determining the state of loading of the vehicle (number of passengers onboard);
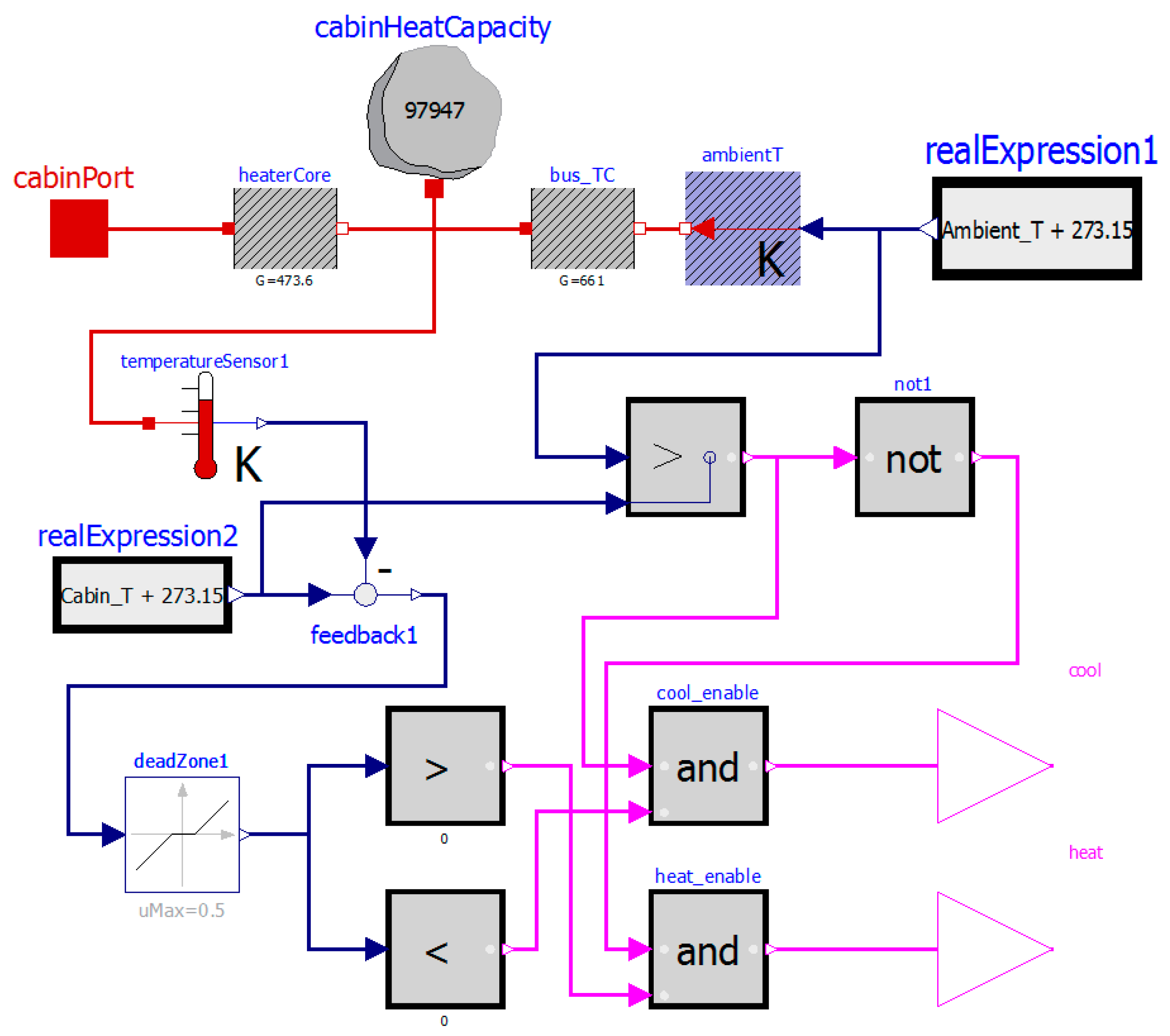
- Thermal conditioning system module for the electrical components of the propulsion system and the passenger compartment, together with the ventilation system consisting mainly of the heat pump module, the valve manifold controlling the flow of thermal energy, and heat exchangers;
- Module simulating the load of auxiliary on-board equipment (low-voltage vehicle installation, vehicle lighting system, passenger information system, ticket validator system, power steering system support system, pneumatic braking support system, etc.).
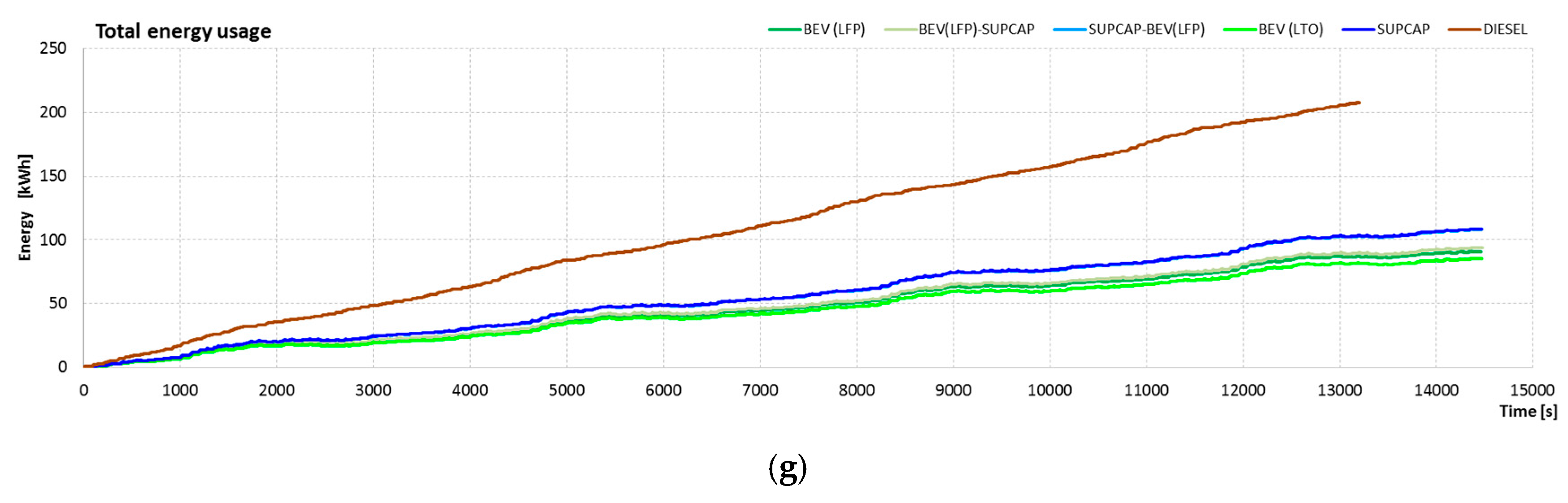
4. Simulations Results
4.1. Research on Energy Consumption Using Test Cycles WP.29
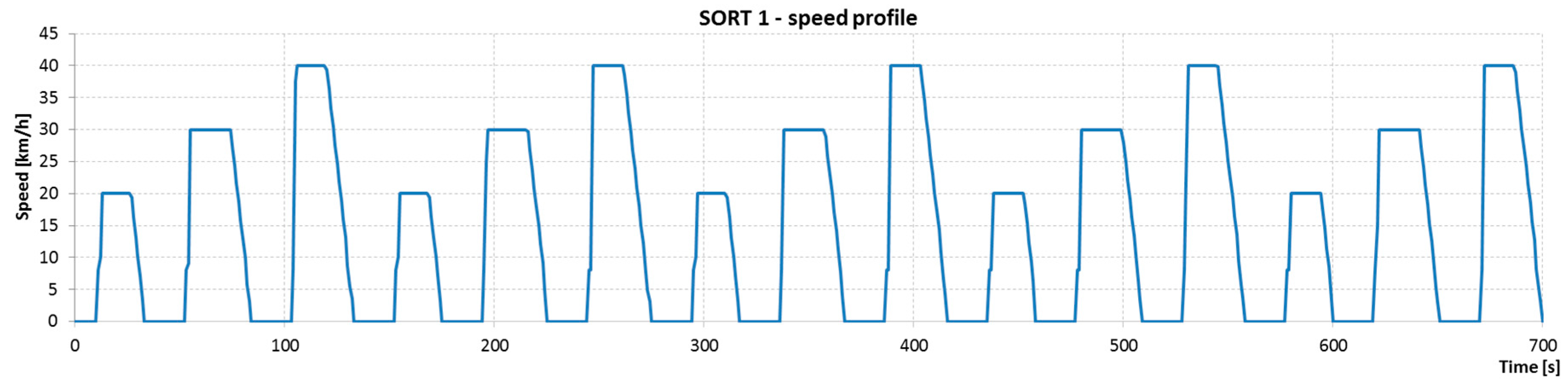
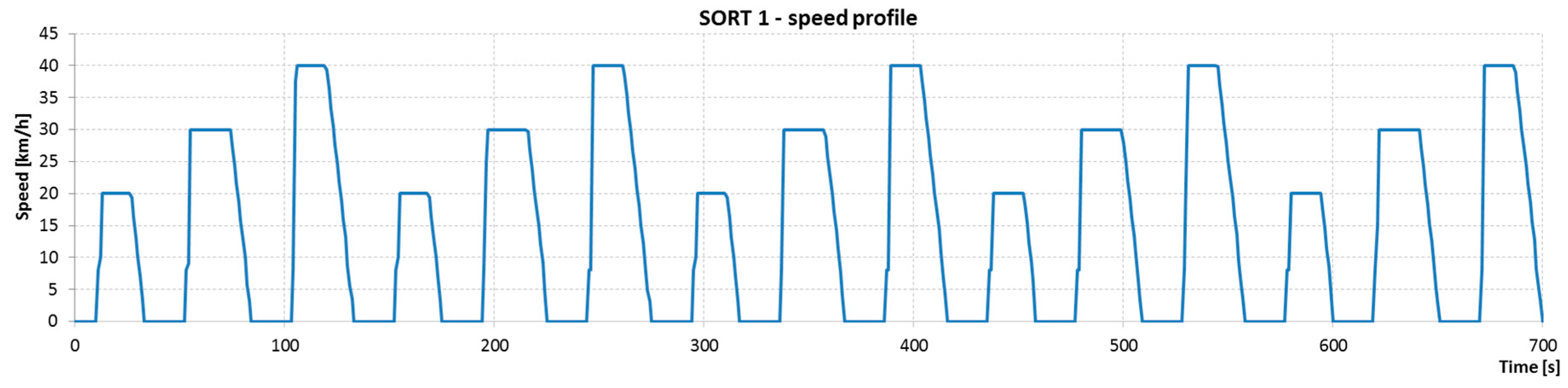
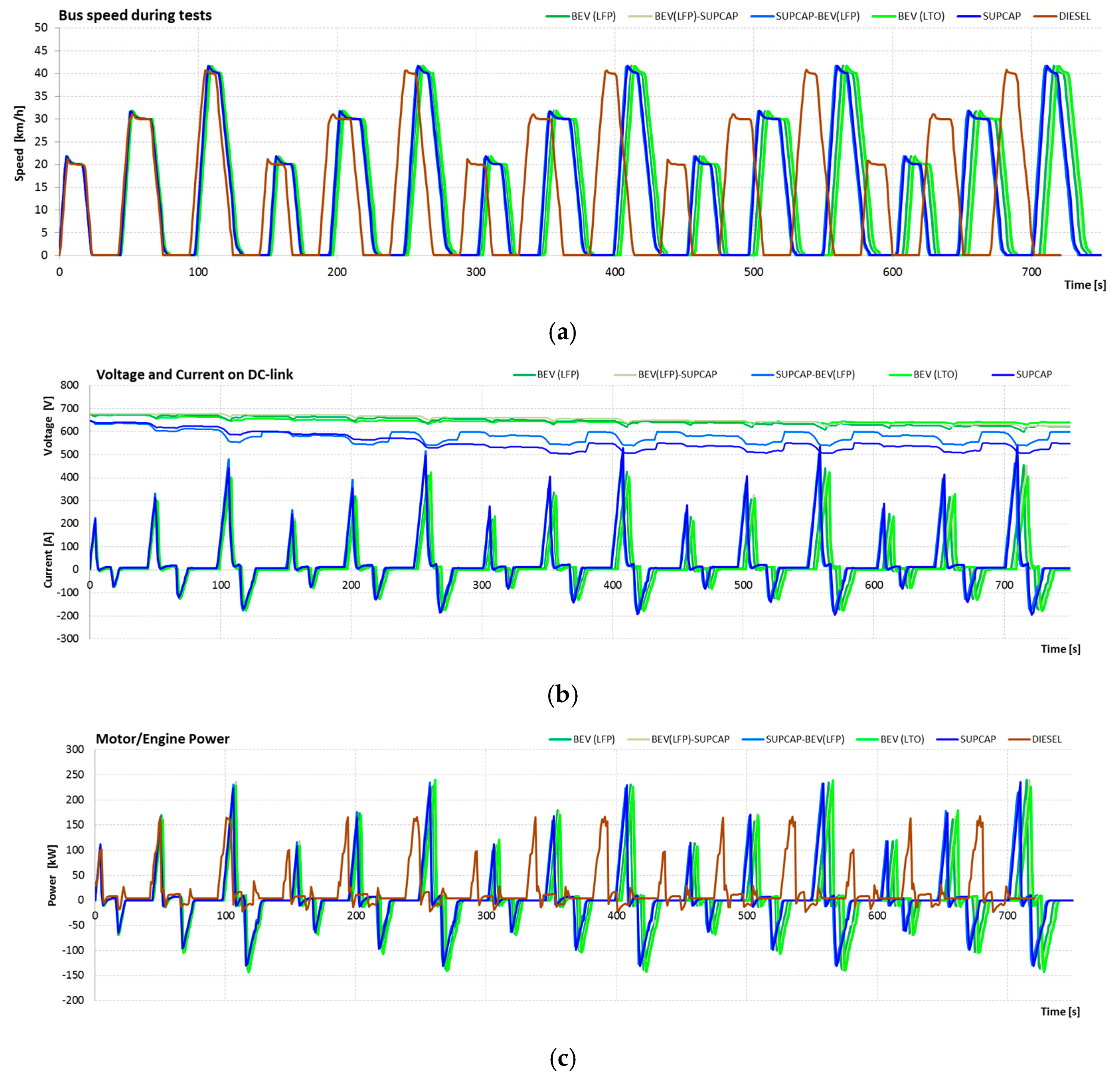
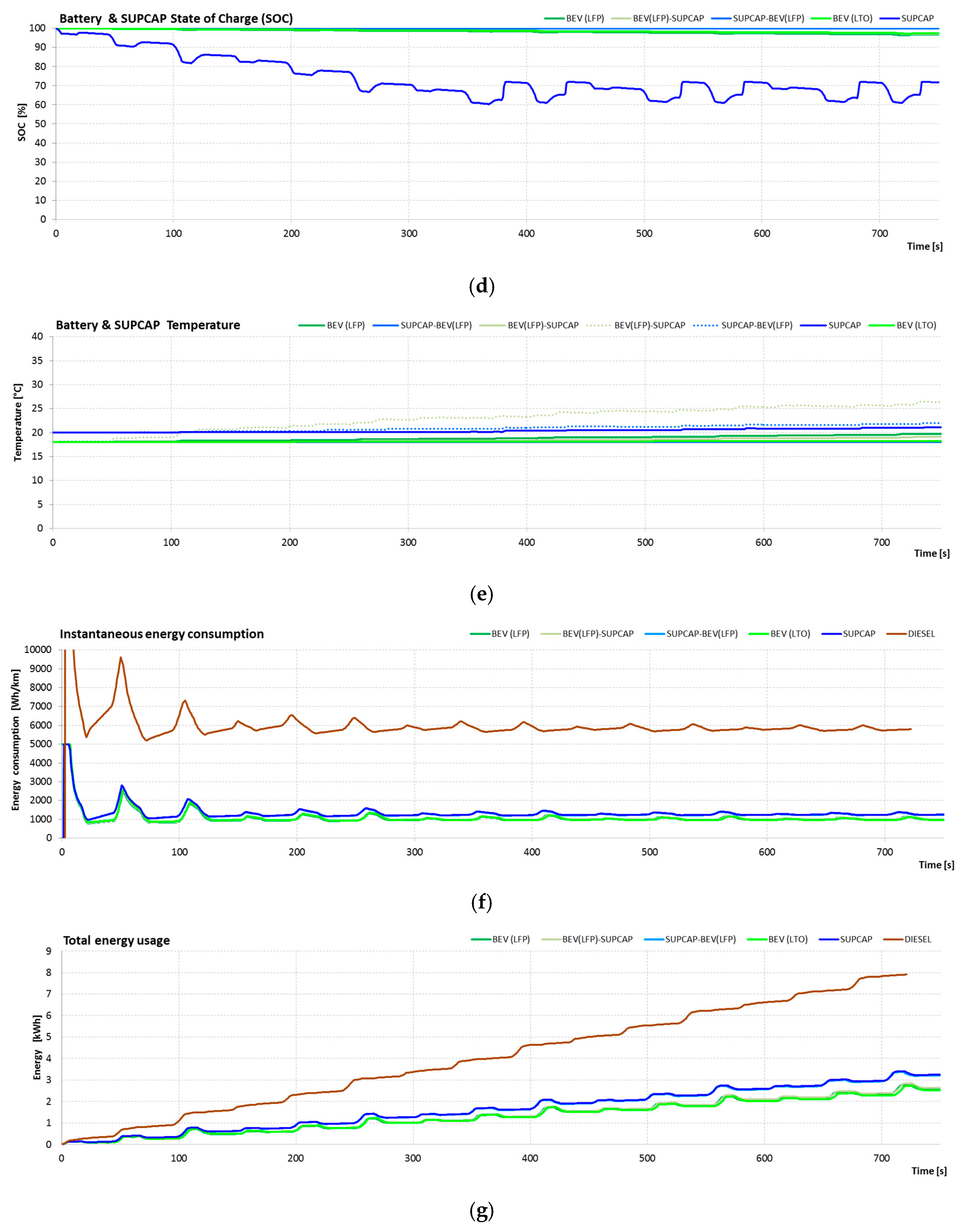
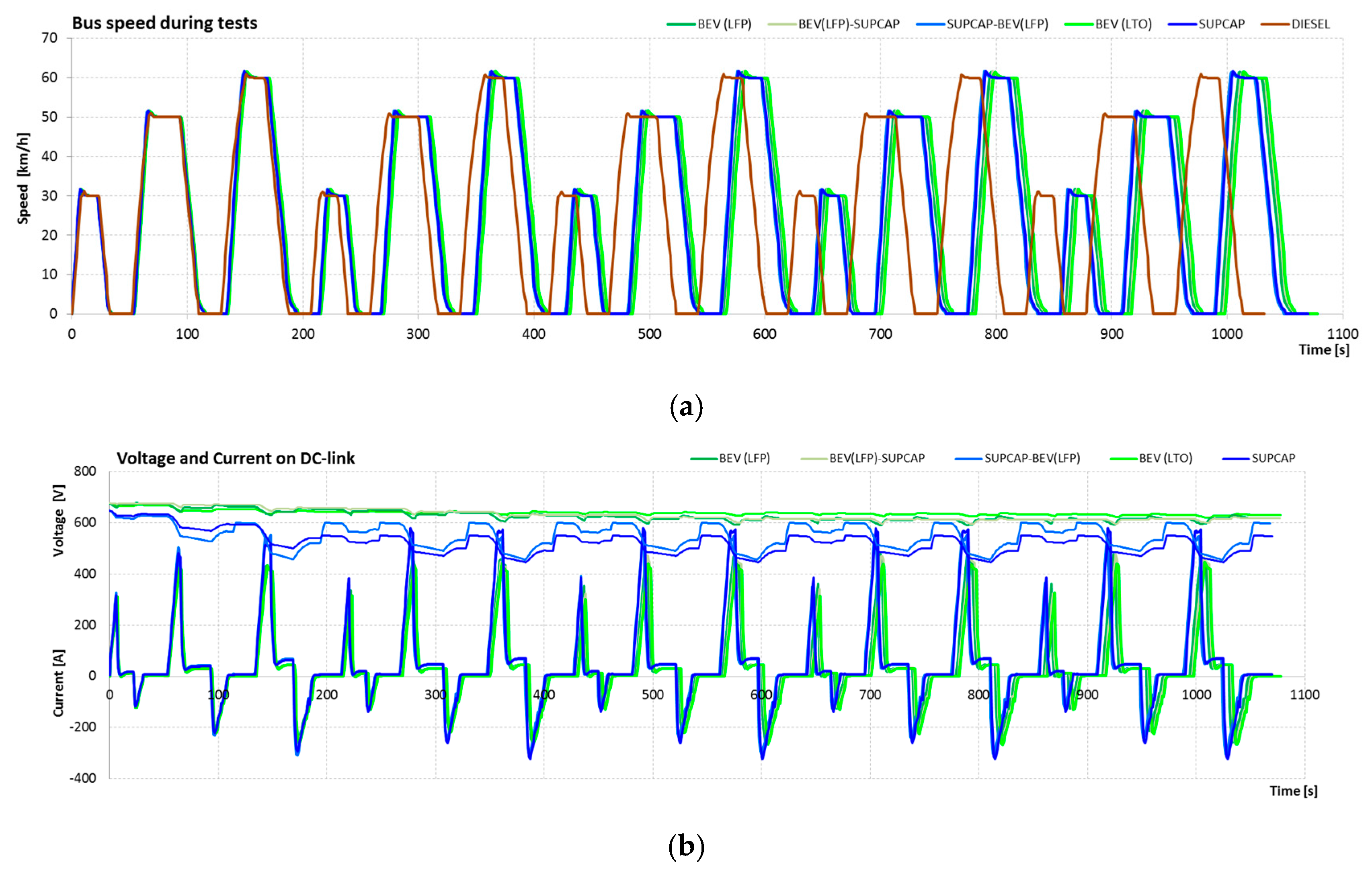
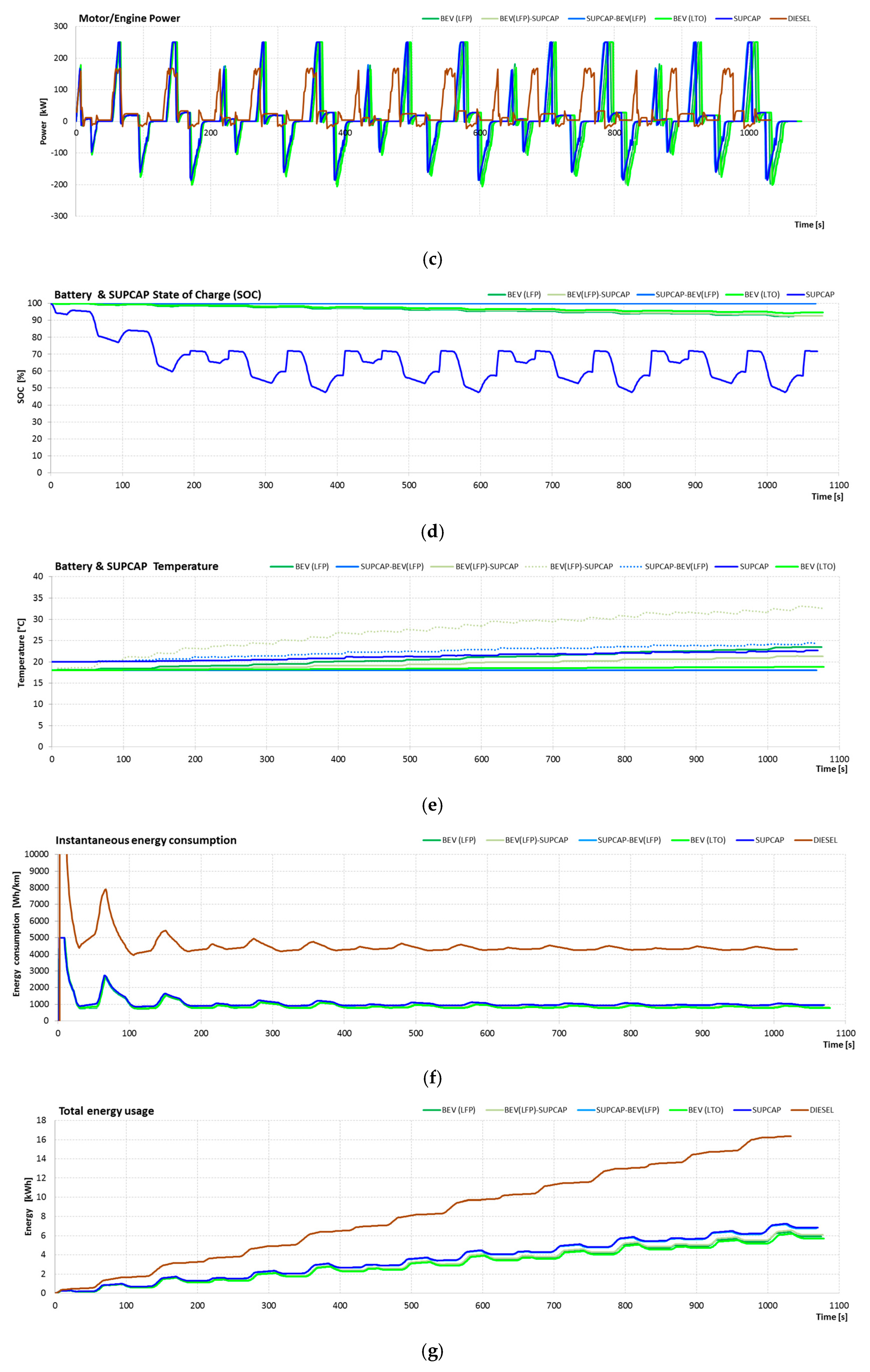
4.1.1. Bus Energy Consumption Tests Using the SORT 1 Test
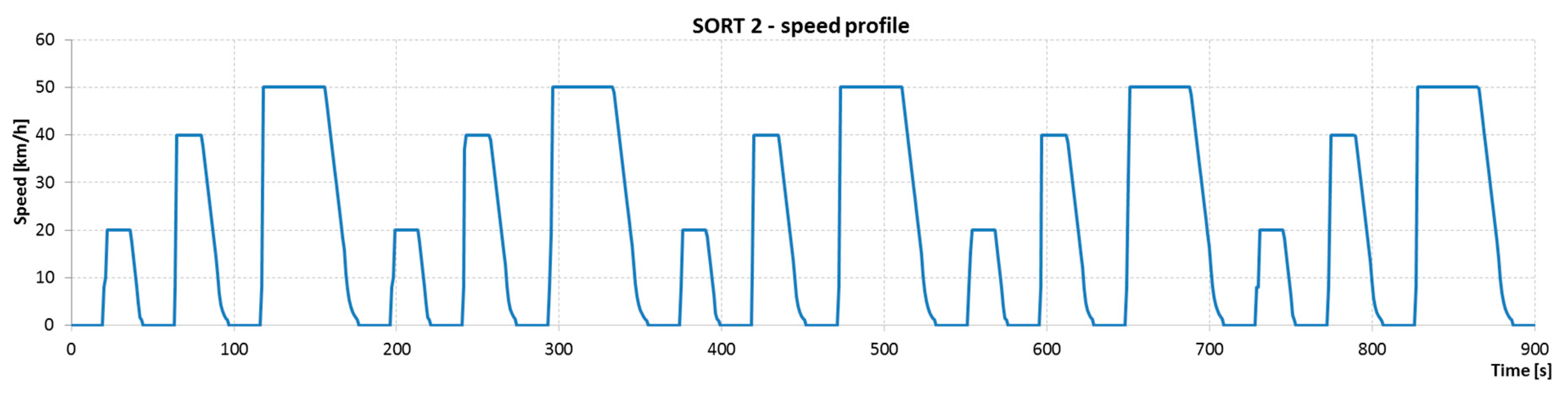
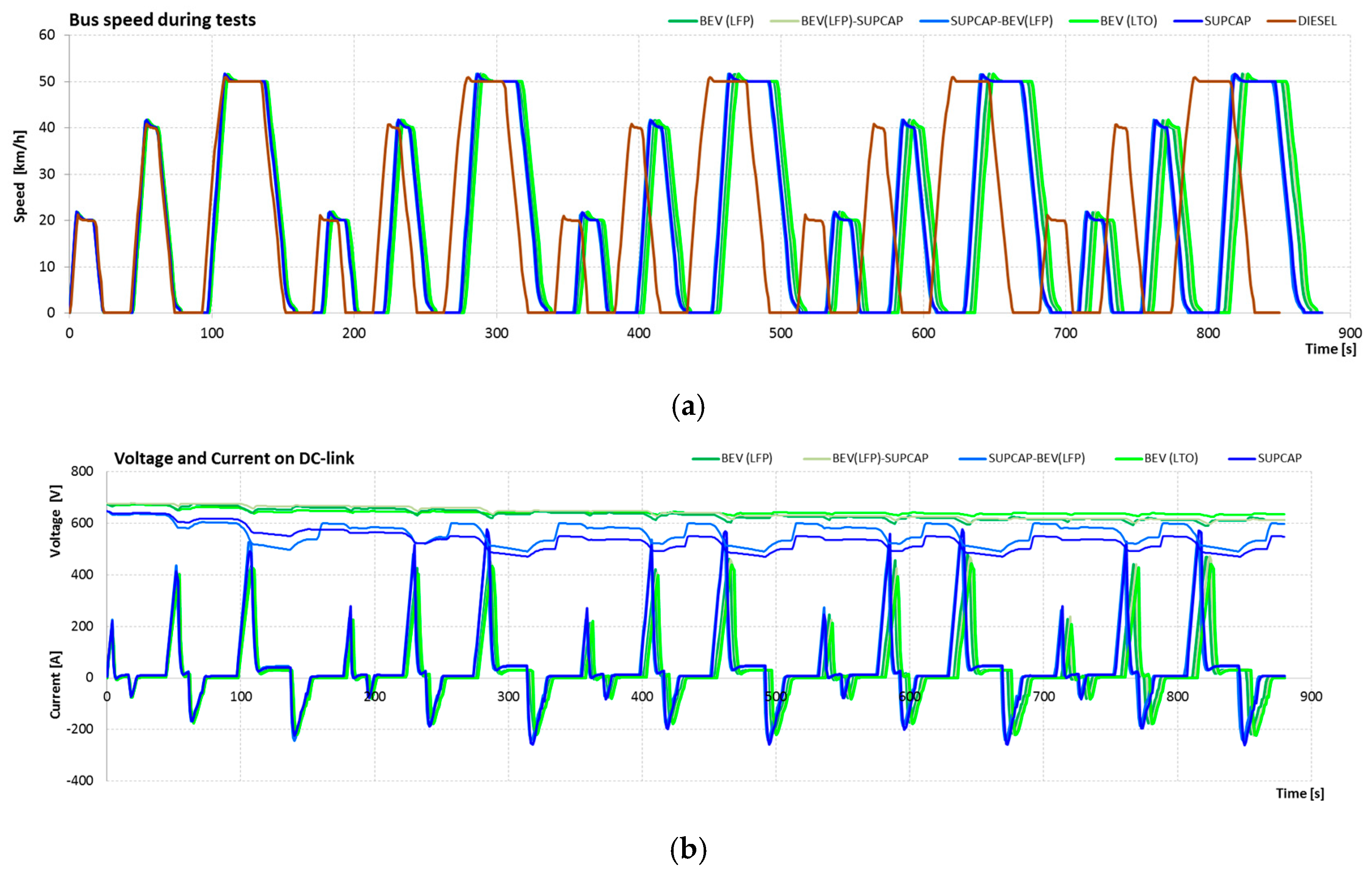
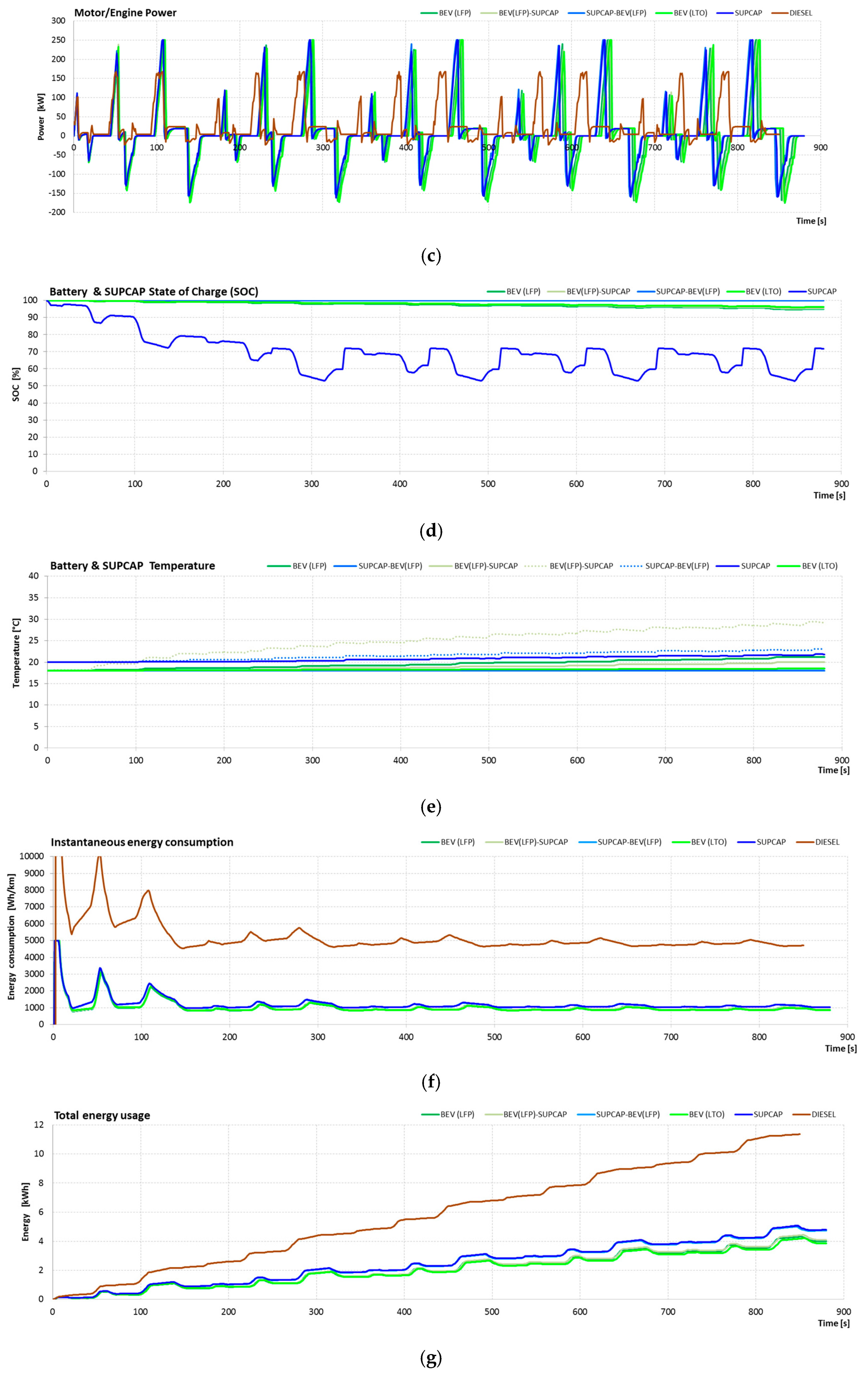
4.1.2. Bus Energy Consumption Tests Using the SORT 2 Test
4.1.3. Bus Energy Consumption Tests Using the SORT 3 Test
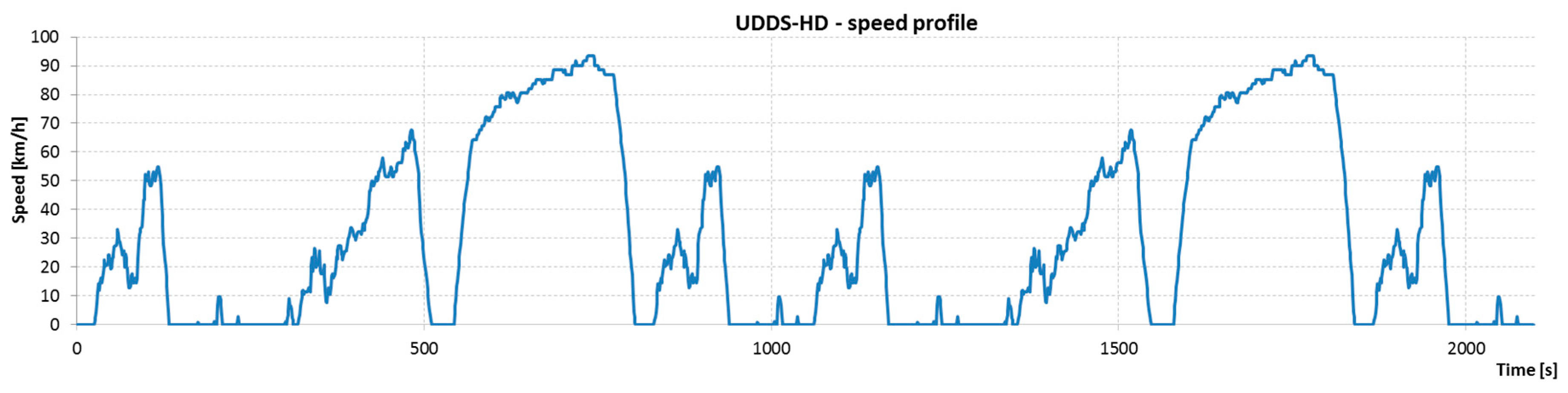
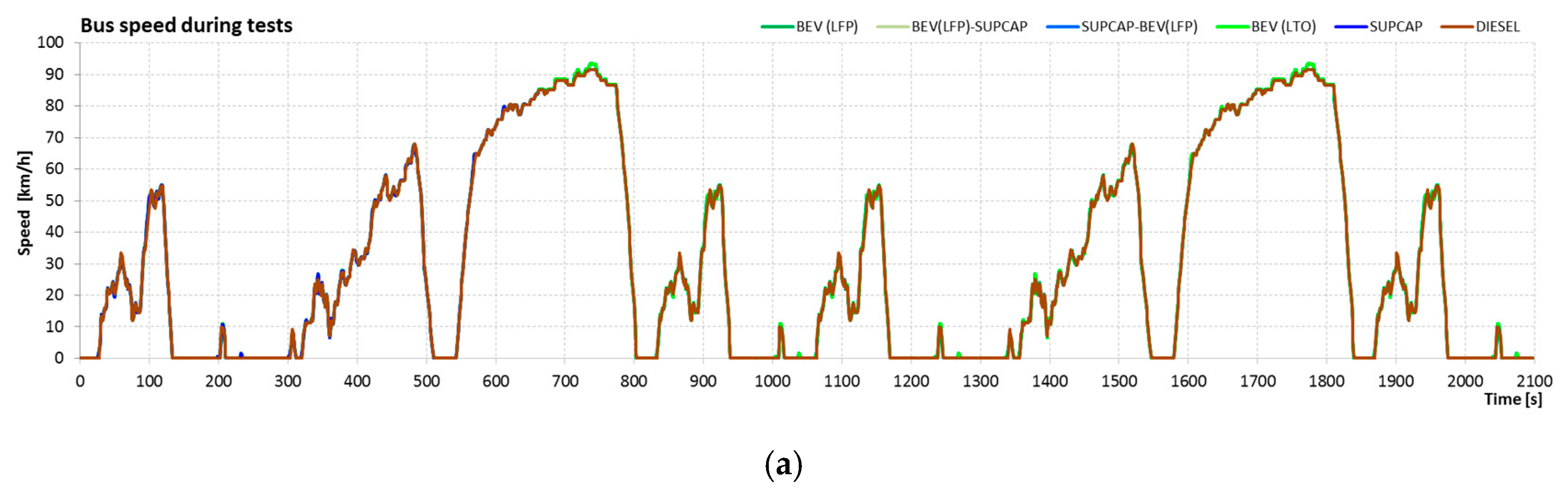
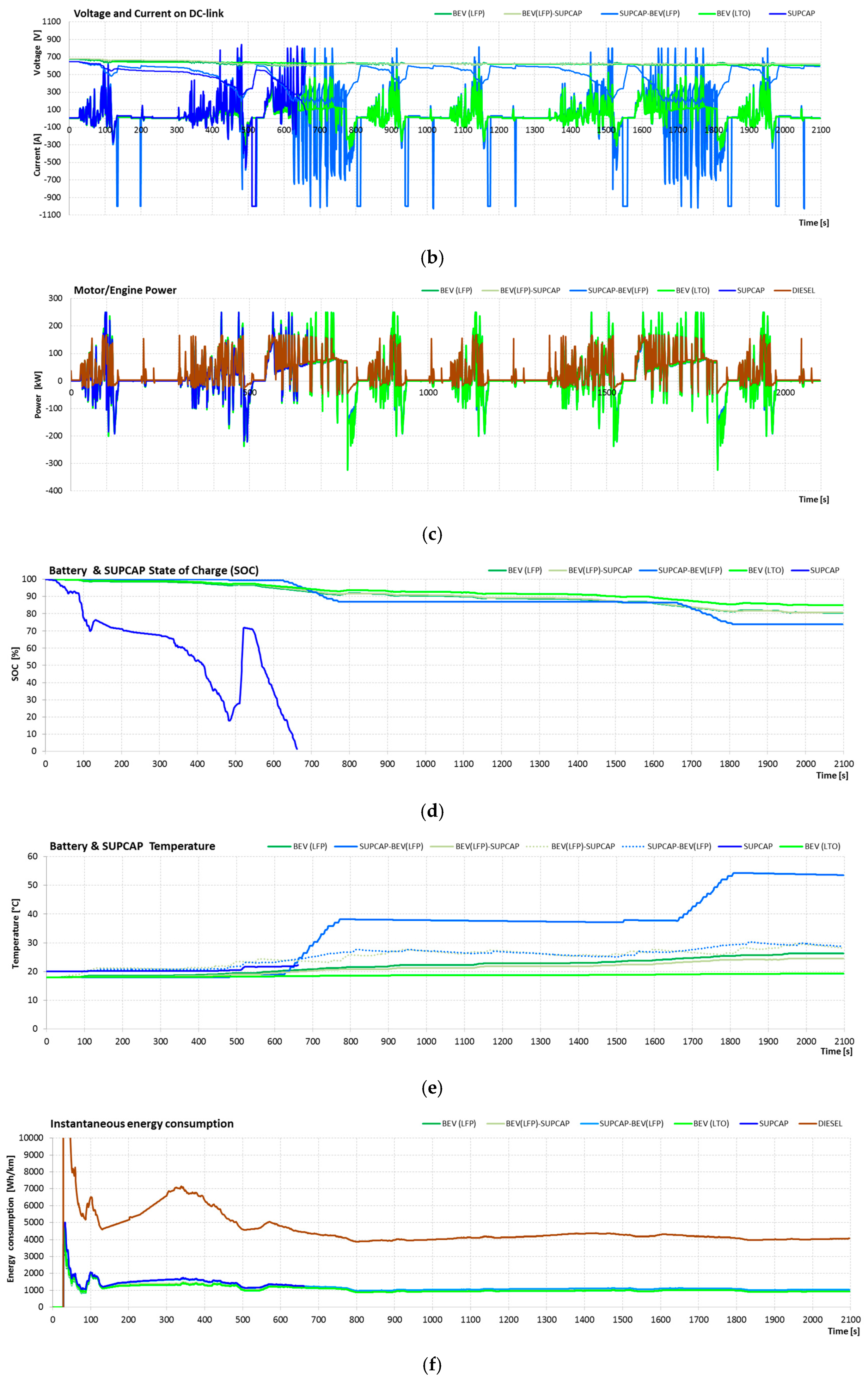
4.1.4. Studies of Energy Consumption by a Bus Using the UDDS-HD Test
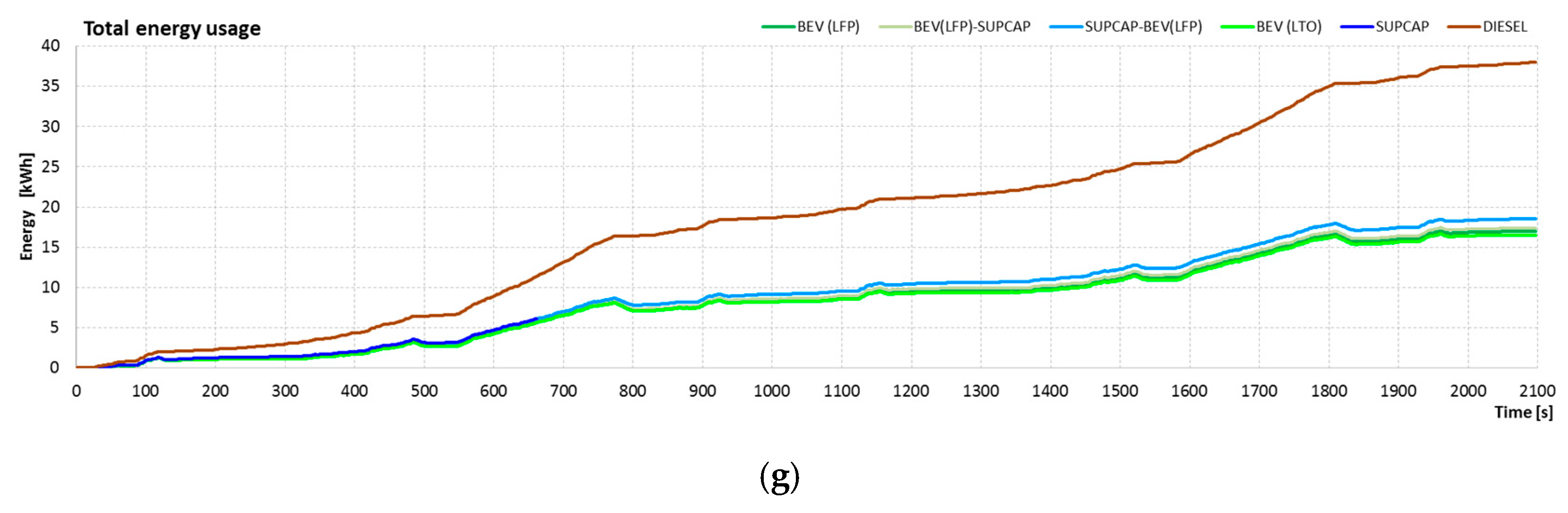
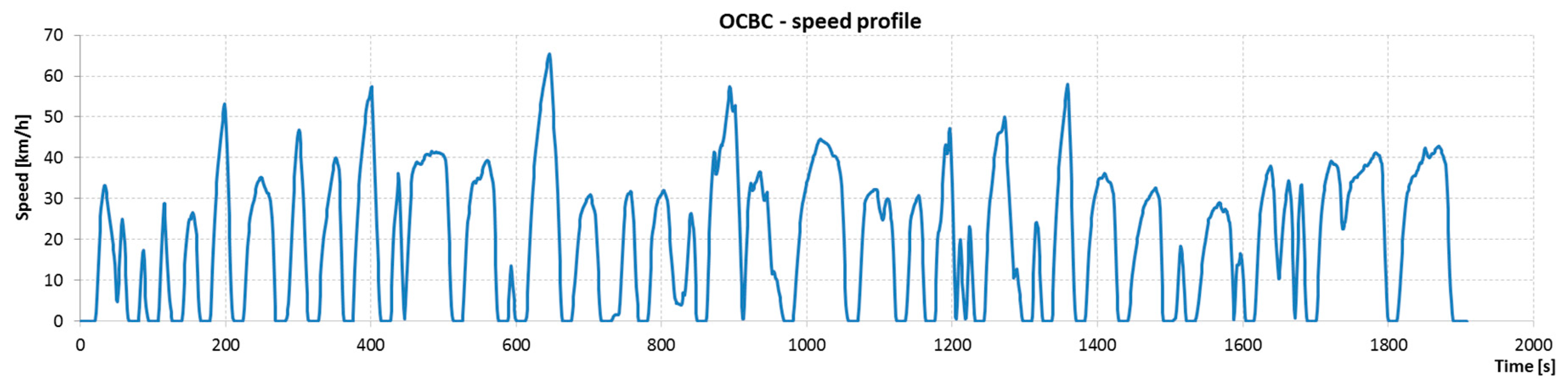
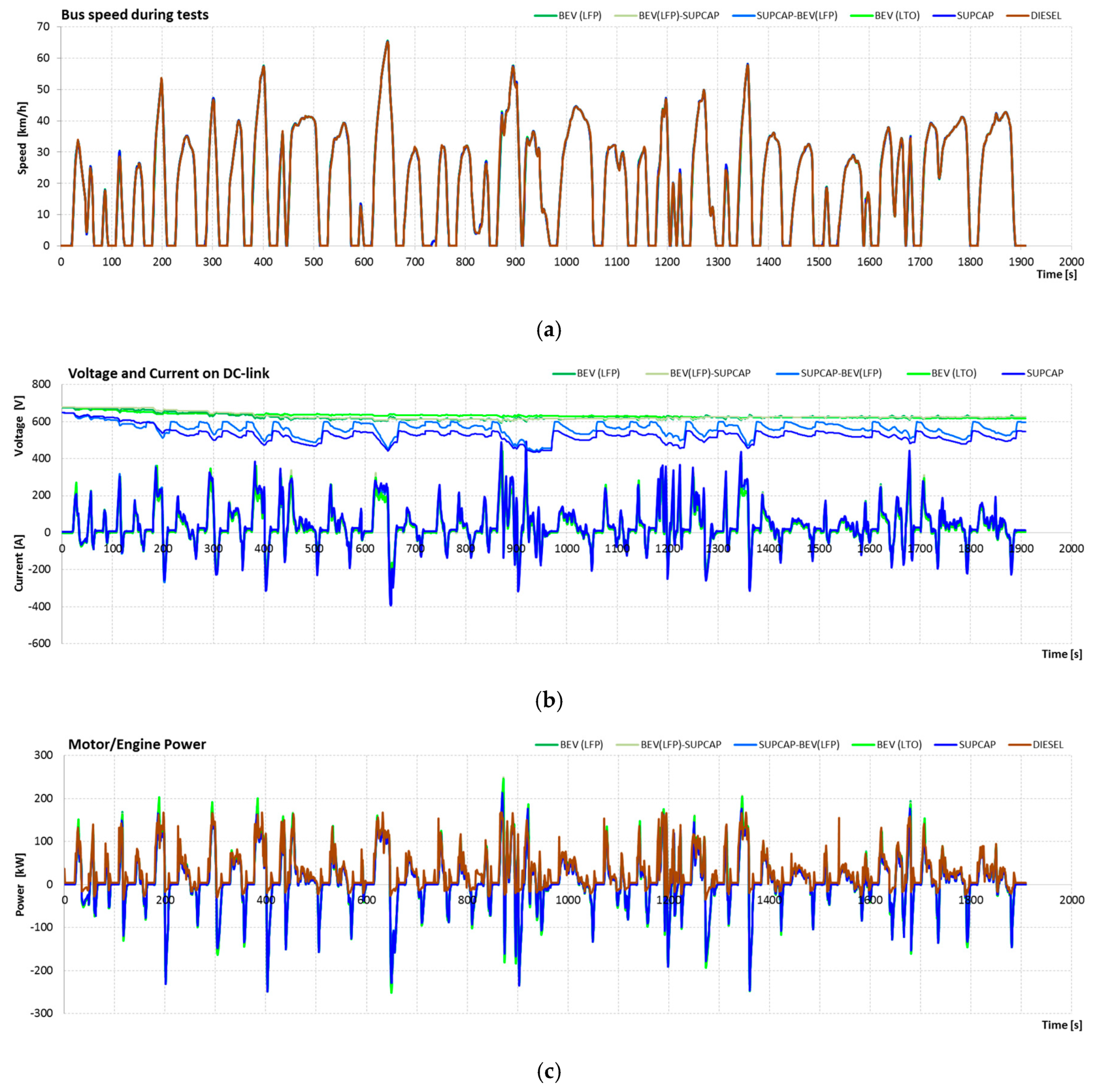
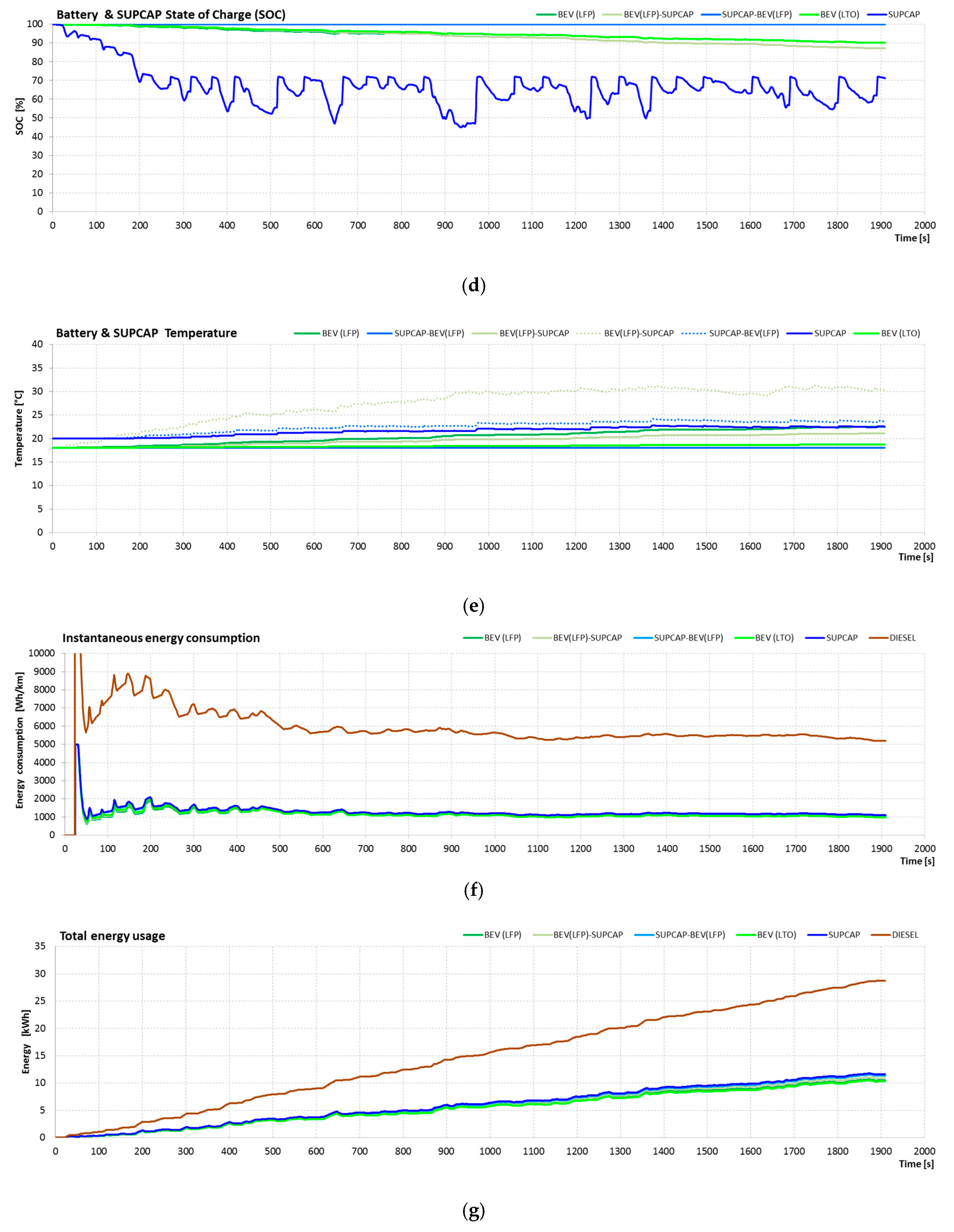
4.1.5. Research on Energy Consumption by a Bus Using the OCBC Test
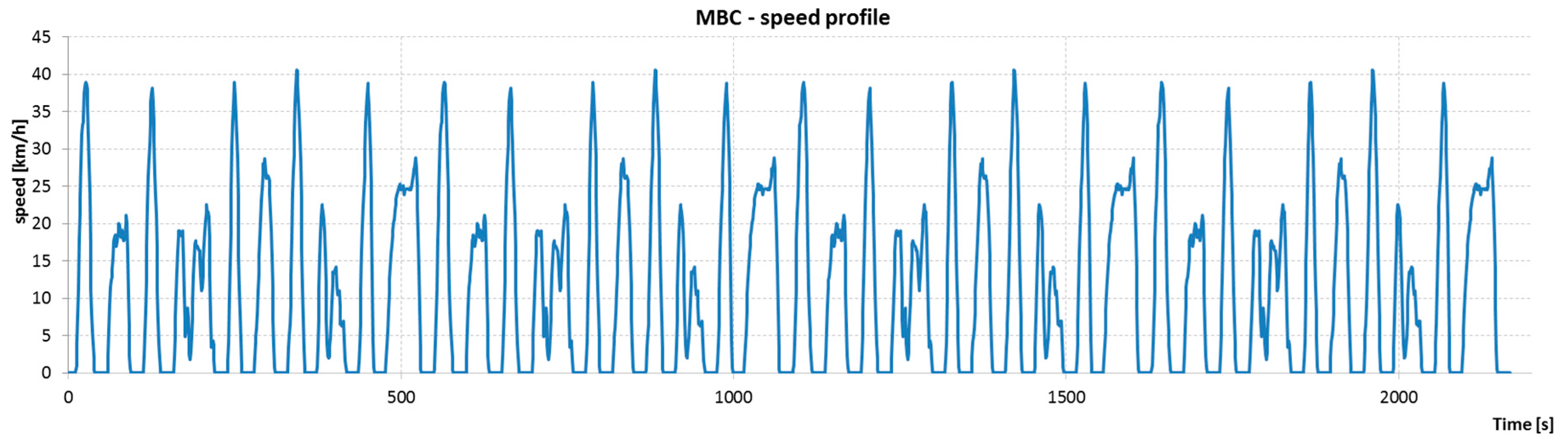
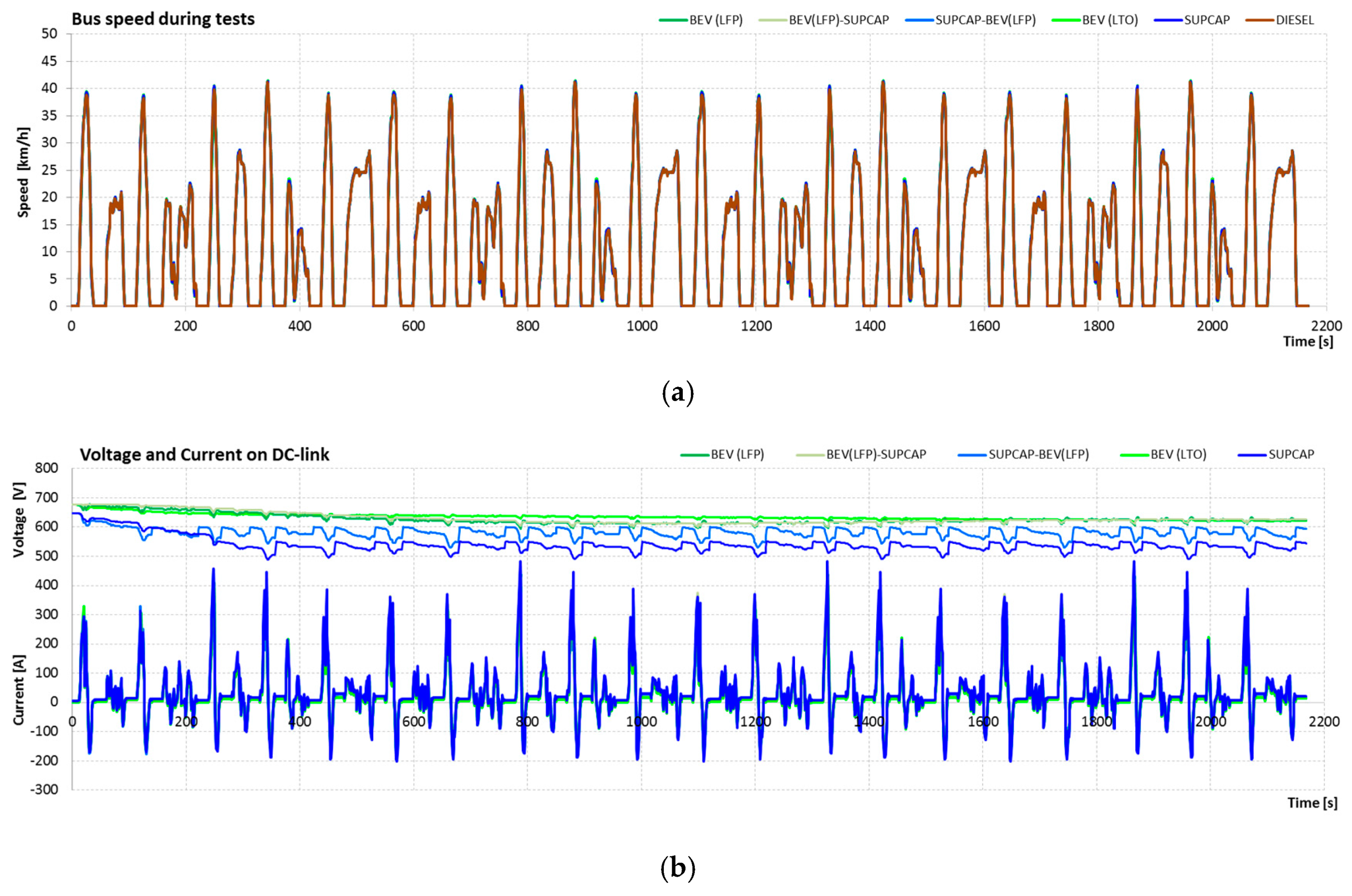
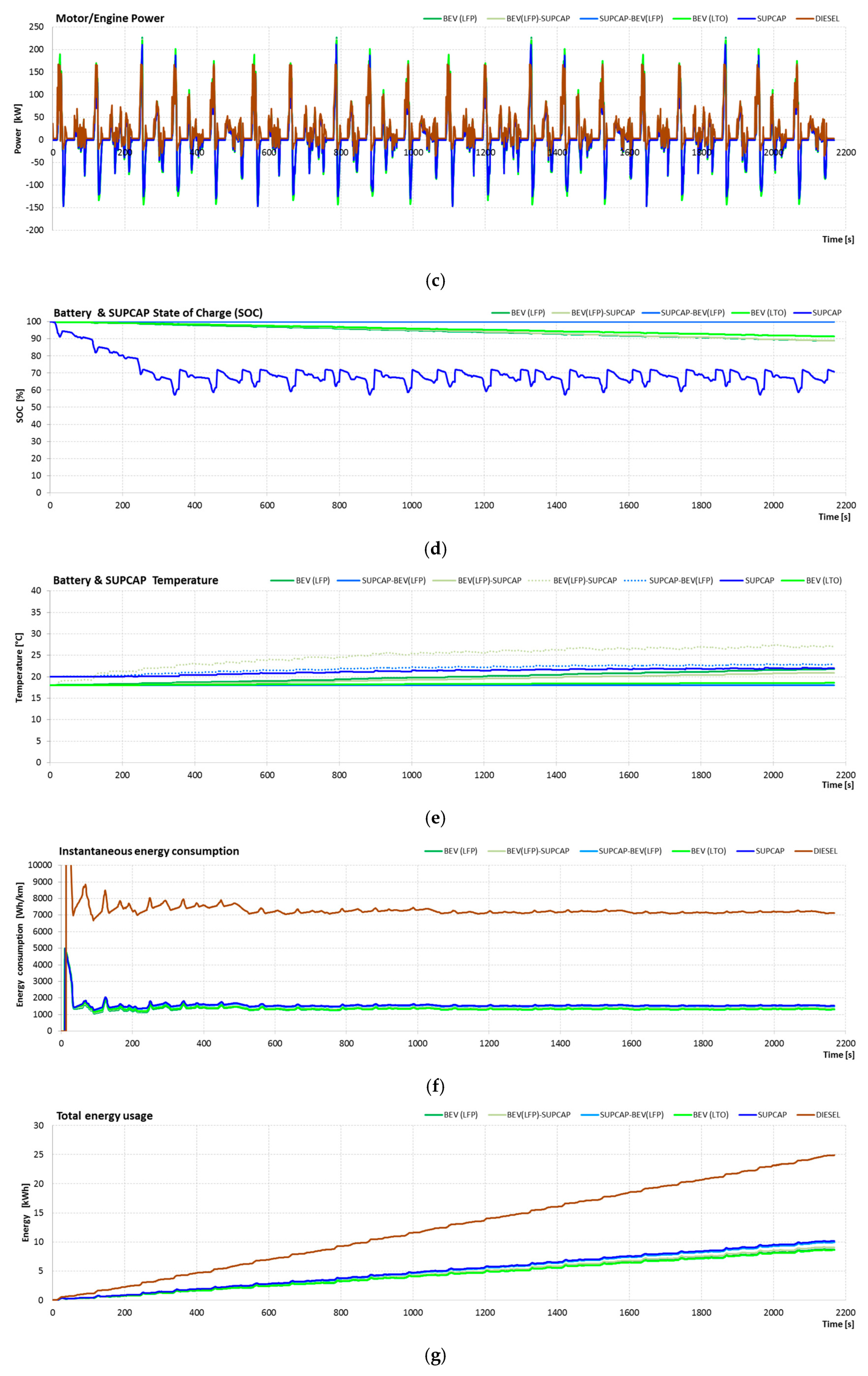
4.1.6. Bus Energy Consumption Tests Using the MBC Test
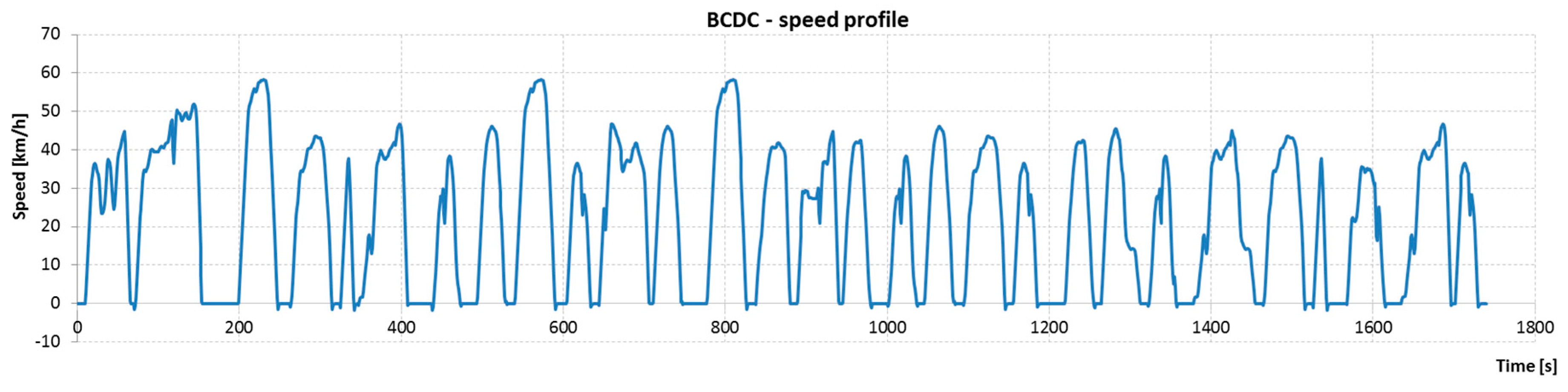
4.1.7. Bus Energy Consumption Tests Using the BCDC Test
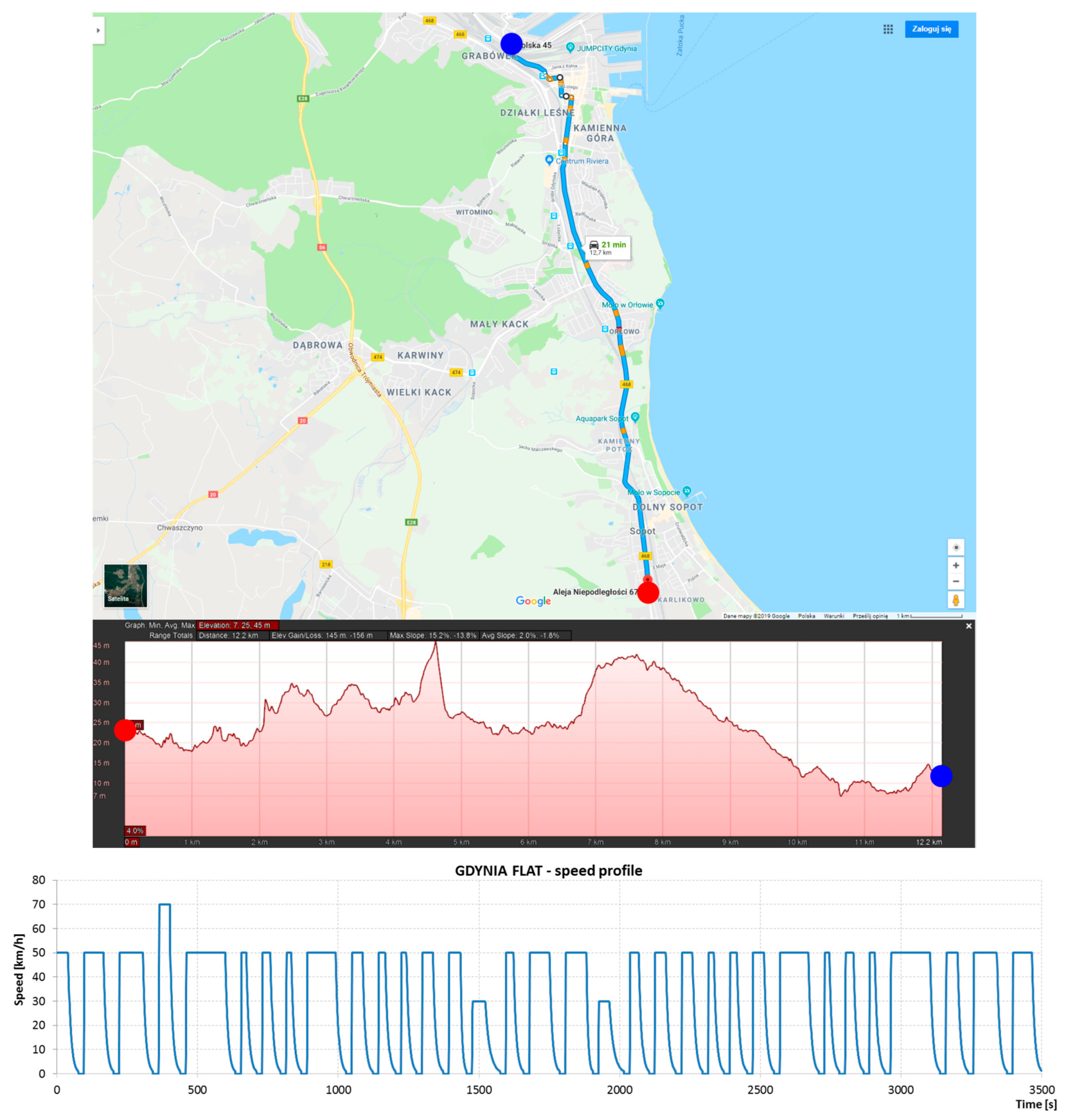
4.2. Research on Energy Consumption in the Gdynia-Flat, Gdynia-Hills Test Cycles
4.2.1. The Study on How Route Choice Impacts the Energy Consumption by the Electric Bus—Gdynia-Flat Route
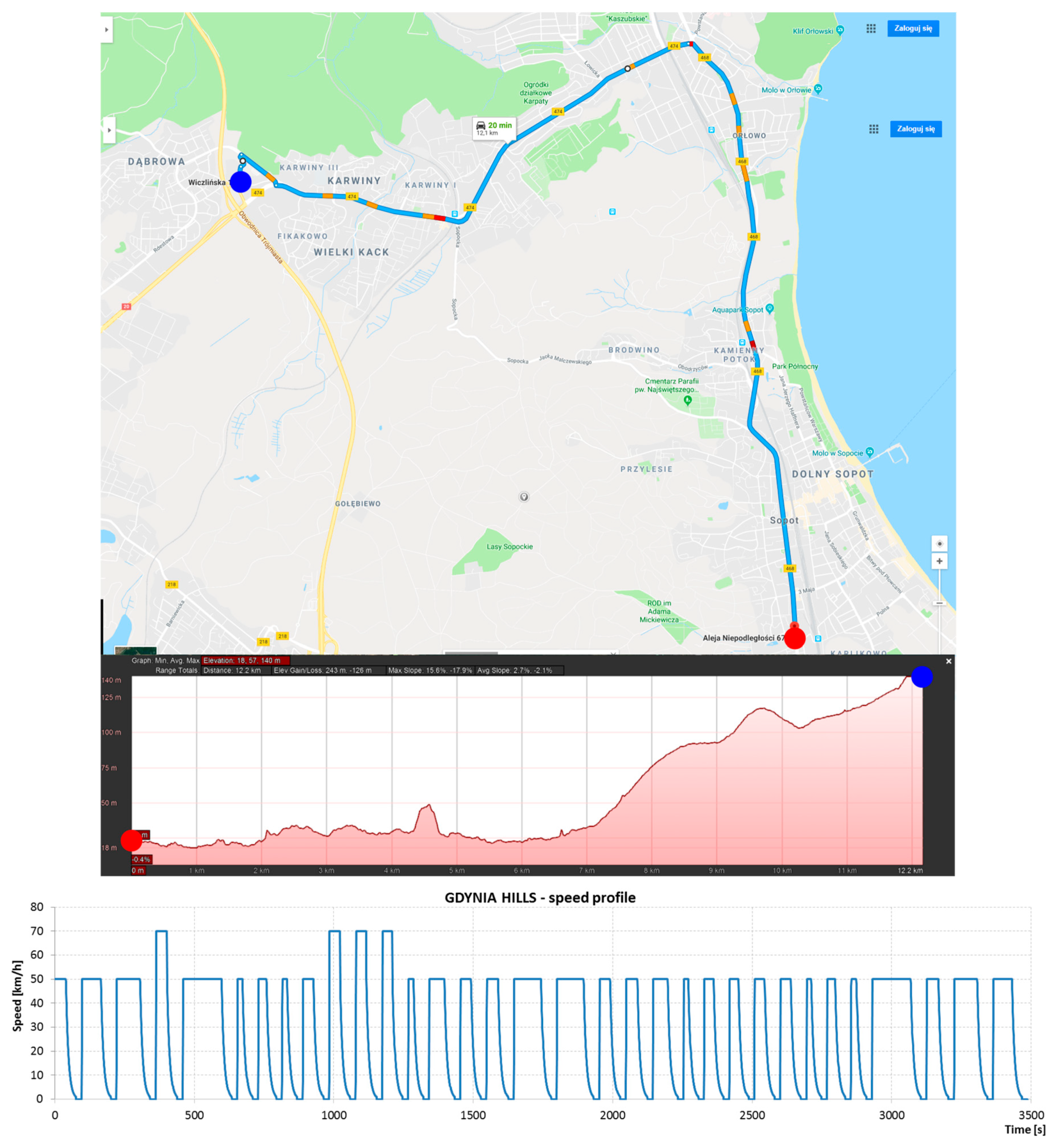
4.2.2. The Study on How Route Choice Impacts the Energy Consumption by the Electric Bus—Gdynia-Hills Route
4.3. Energy Consumption Tests for Changes in Passenger Load, Thermal Conditioning System, and Ambient Temperatures
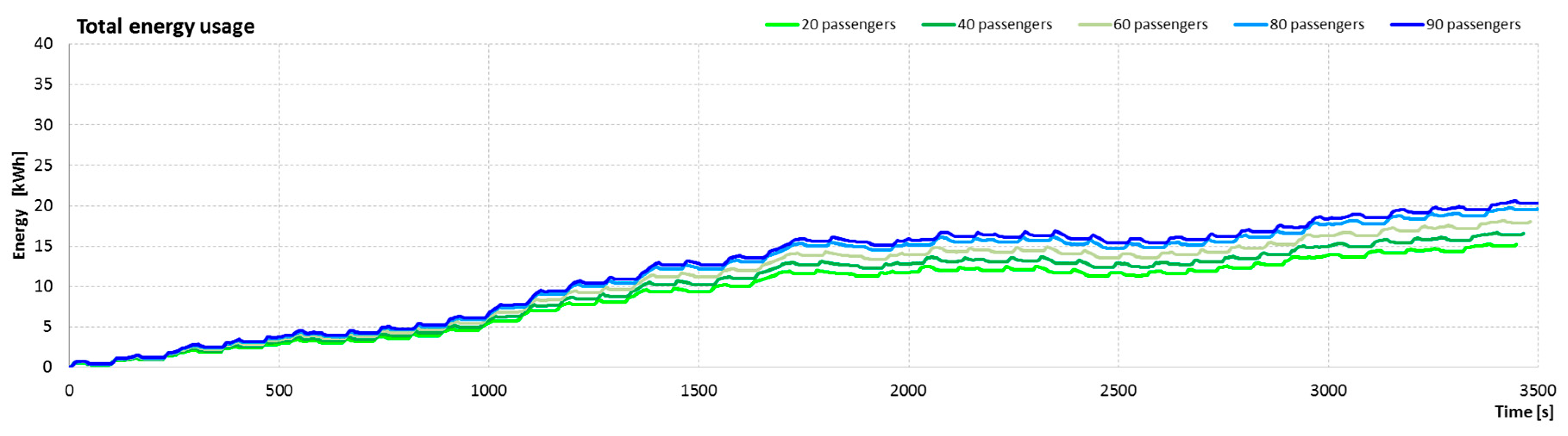
4.3.1. Investigation of Influence of Electric Bus Passenger Number Change on Energy Consumption
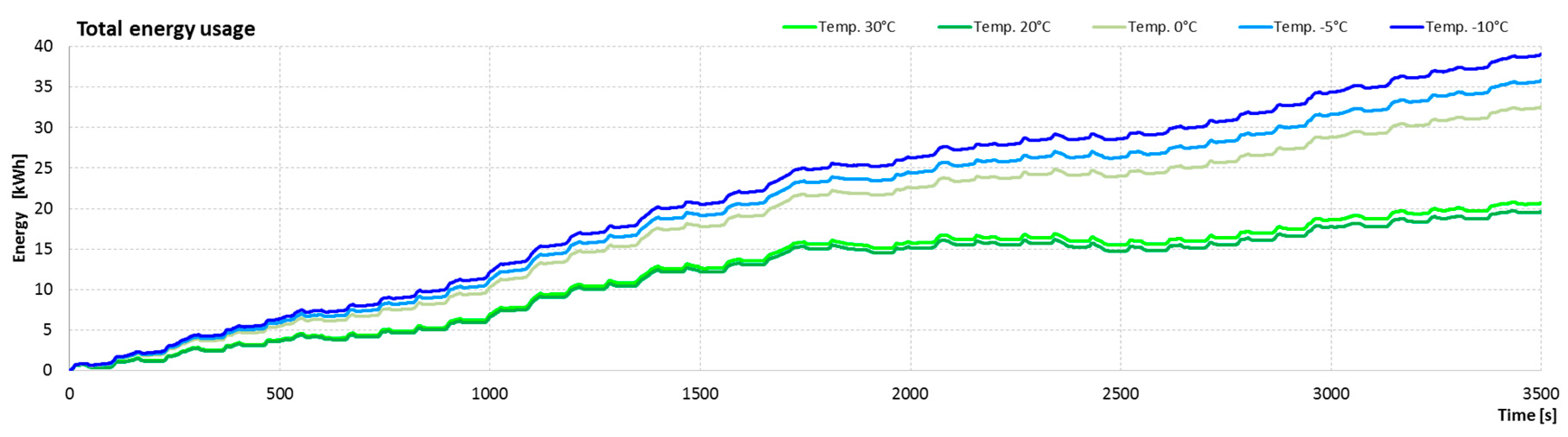
4.3.2. Study of Influence of Ambient Temperature Changes on the Energy Consumption in an Electric Bus with a Resistive Heating Source and Air Conditioning
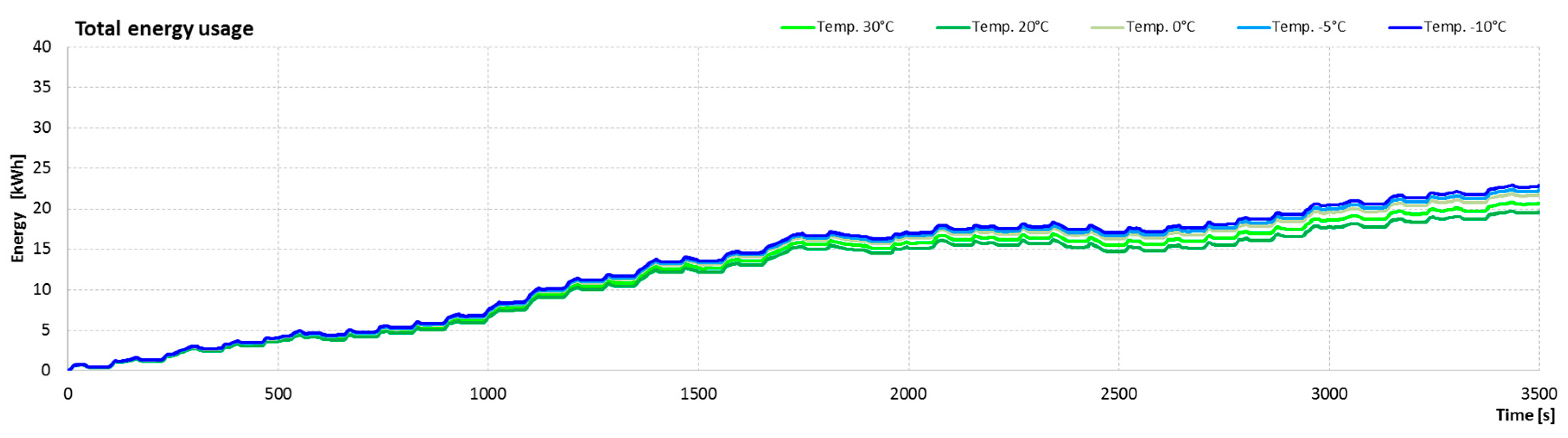
4.3.3. Study of Influence of Ambient Temperature Changes on the Energy Consumption in an Electric Bus with a Heat Pump
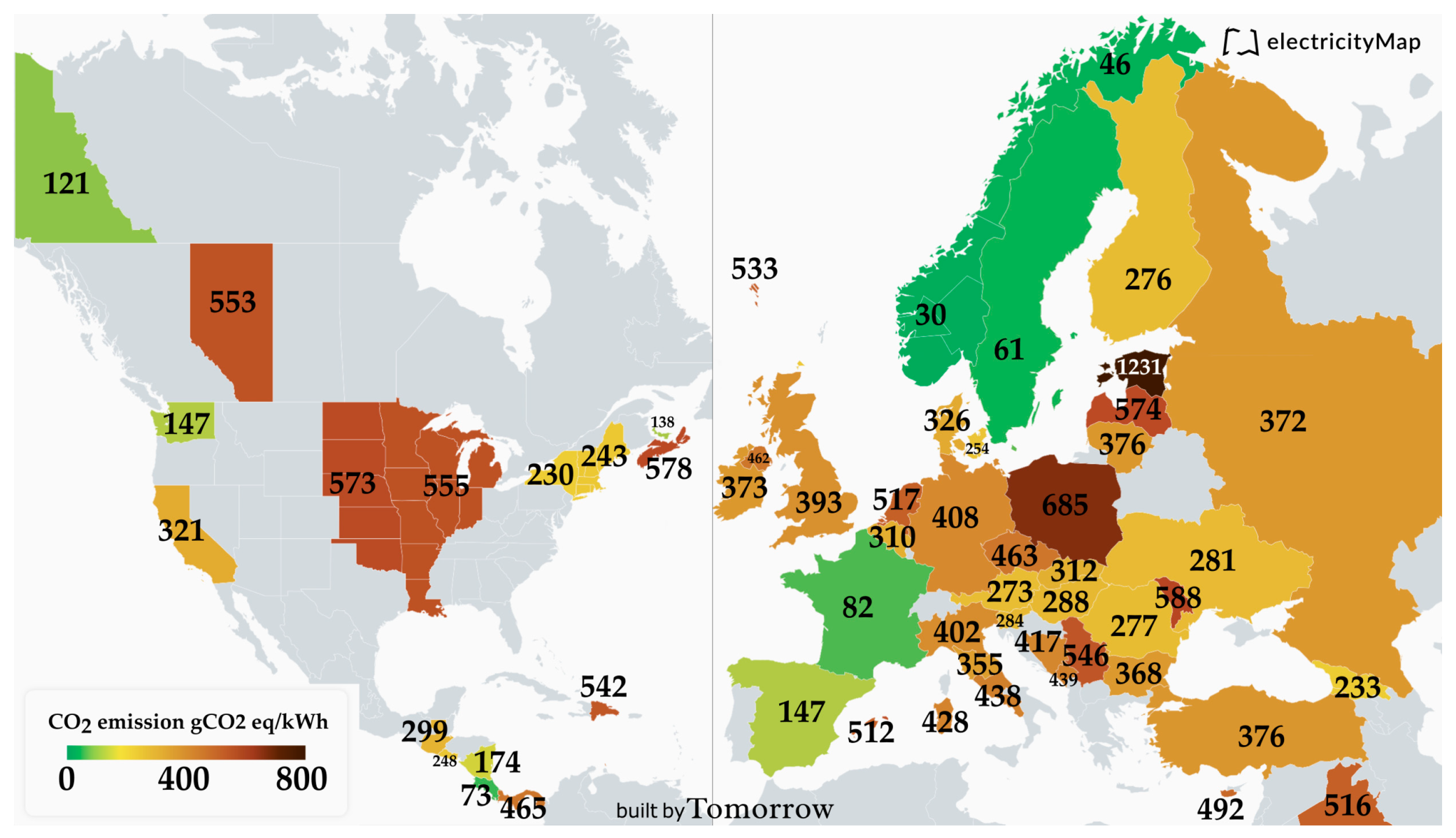
4.4. CO2 Emission
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Sanchez-Lugo. Global Climate Report-September 2018|State of the Climate|National Centers for Environmental Information (NCEI). Available online: https://www.ncdc.noaa.gov/sotc/global/201809 (accessed on 18 November 2018).
- Ministry of the Environment. COP24. Available online: https://cop24.gov.pl/ (accessed on 1 January 2019).
- Plumer, B. COP24, the New Round of Global Climate Talks, Has Begun. We Answer Three Key Questions. Available online: https://www.nytimes.com/2018/12/04/climate/cop24-climate-conference-katowice.html (accessed on 1 January 2019).
- Worland, J. The Paris Agreement Lives on at the U.N. Climate Change Conference. But Political Disruption Still Remains a Threat. Available online: http://time.com/5480146/climate-change-cop-24-paris-agreement/ (accessed on 1 January 2019).
- The Directorate-General for Climate Action (DG CLIMA). Road Transport: Reducing CO2 Emissions from Vehicles-Climate Action-European Commission. Available online: https://ec.europa.eu/clima/policies/transport/vehicles_en (accessed on 1 January 2019).
- Howell, D. Hybrid and Electric Systems R&D at DOE: Fiscal Year 2011–2012 Status. WEVJ 2012, 5, 370–381. [Google Scholar] [CrossRef]
- Bottiglione, F.; Contursi, T.; Gentile, A.; Mantriota, G. The Fuel Economy of Hybrid Buses: The Role of Ancillaries in Real Urban Driving. Energies 2014, 7, 4202–4220. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; You, S.; Yang, C.; Yan, B.; Song, J.; Chen, Z. Driving-behavior-aware stochastic model predictive control for plug-in hybrid electric buses. Appl. Energy 2016, 162, 868–879. [Google Scholar] [CrossRef]
- Martinez-Laserna, E.; Herrera, V.; Gandiaga, I.; Milo, A.; Sarasketa-Zabala, E.; Gaztañaga, H. Li-Ion Battery Lifetime Model’s Influence on the Economic Assessment of a Hybrid Electric Bus’s Operation. WEVJ 2018, 9, 28. [Google Scholar] [CrossRef]
- Wang, X.; He, H.; Sun, F.; Sun, X.; Tang, H. Comparative Study on Different Energy Management Strategies for Plug-In Hybrid Electric Vehicles. Energies 2013, 6, 5656–5675. [Google Scholar] [CrossRef] [Green Version]
- Kim, M.; Jeung, D.; Min, K. Fuel Economy of Series Hybrid Electric Bus by Matching the Gear Ratio of Different Capacity Traction Motors. WEVJ 2012, 5, 254–260. [Google Scholar] [CrossRef] [Green Version]
- Tian, X.; He, R.; Xu, Y. Design of an Energy Management Strategy for a Parallel Hybrid Electric Bus Based on an IDP-ANFIS Scheme. IEEE Access 2018, 6, 23806–23819. [Google Scholar] [CrossRef]
- Zhao, K.; Liang, Z.; Huang, Y.; Wang, H.; Khajepour, A.; Zhen, Y. Research on a Novel Hydraulic/Electric Synergy Bus. Energies 2018, 11, 34. [Google Scholar] [CrossRef]
- Topal, O.; Nakir, İ. Total Cost of Ownership Based Economic Analysis of Diesel, CNG and Electric Bus Concepts for the Public Transport in Istanbul City. Energies 2018, 11, 2369. [Google Scholar] [CrossRef]
- Madanda, R.; Musasizi, P.I.; Asiimwe, A.T.; Matovu, F.; Africa, J.; Tickodri-Togboa, S.S. Model Based Engineering and Realization of the KAYOOLA Electric City Bus Powertrain. WEVJ 2013, 6, 155–164. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Wang, T. Optimization of Battery Capacity Decay for Semi-Active Hybrid Energy Storage System Equipped on Electric City Bus. Energies 2017, 10, 792. [Google Scholar] [CrossRef]
- Min, H.; Lai, C.; Yu, Y.; Zhu, T.; Zhang, C. Comparison Study of Two Semi-Active Hybrid Energy Storage Systems for Hybrid Electric Vehicle Applications and Their Experimental Validation. Energies 2017, 10, 279. [Google Scholar] [CrossRef]
- Nájera, J.; Moreno-Torres, P.; Lafoz, M.; de Castro, R.; Arribas, J.R. Approach to Hybrid Energy Storage Systems Dimensioning for Urban Electric Buses Regarding Efficiency and Battery Aging. Energies 2017, 10, 1708. [Google Scholar] [CrossRef]
- Soltani, M.; Ronsmans, J.; Kakihara, S.; Jaguemont, J.; van den Bossche, P.; van Mierlo, J.; Omar, N. Hybrid Battery/Lithium-Ion Capacitor Energy Storage System for a Pure Electric Bus for an Urban Transportation Application. Appl. Sci. 2018, 8, 1176. [Google Scholar] [CrossRef]
- Fang, S.-C.; Ke, B.-R.; Chung, C.-Y. Minimization of Construction Costs for an All Battery-Swapping Electric-Bus Transportation System: Comparison with an All Plug-In System. Energies 2017, 10, 890. [Google Scholar] [CrossRef]
- Li, W.; Li, Y.; Deng, H.; Bao, L. Planning of Electric Public Transport System under Battery Swap Mode. Sustainability 2018, 10, 2528. [Google Scholar] [CrossRef]
- Liu, H.; Wang, C.; Zhao, X.; Guo, C. An Adaptive-Equivalent Consumption Minimum Strategy for an Extended-Range Electric Bus Based on Target Driving Cycle Generation. Energies 2018, 11, 1805. [Google Scholar] [CrossRef]
- Mallon, K.; Assadian, F.; Fu, B. Analysis of On-Board Photovoltaics for a Battery Electric Bus and Their Impact on Battery Lifespan. Energies 2017, 10, 943. [Google Scholar] [CrossRef]
- Aschilean, I.; Varlam, M.; Culcer, M.; Iliescu, M.; Raceanu, M.; Enache, A.; Raboaca, M.; Rasoi, G.; Filote, C. Hybrid Electric Powertrain with Fuel Cells for a Series Vehicle. Energies 2018, 11, 1294. [Google Scholar] [CrossRef]
- Yulianto, A.; Simic, M.; Taylor, D.; Trivailo, P. Modelling of full electric and hybrid electric fuel cells buses. Procedia Comput. Sci. 2017, 112, 1916–1925. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Z.; Shi, J.; Lin, C.; Gao, Y. Optimization of a Dual-Motor Coupled Powertrain Energy Management Strategy for a Battery Electric Bus Based on Dynamic Programming Method. IEEE Access 2018, 6, 32899–32909. [Google Scholar] [CrossRef]
- Zhao, M.; Shi, J.; Lin, C.; Zhang, J. Application-Oriented Optimal Shift Schedule Extraction for a Dual-Motor Electric Bus with Automated Manual Transmission. Energies 2018, 11, 325. [Google Scholar] [CrossRef]
- Panday, A.; Bansal, H.O. Optimal fuel control of series-parallel input split hybrid electric vehicle using genetic algorithm based control strategy. In Proceedings of the2015 International Conference on Energy Economics and Environment (ICEEE), Greater Noida, India, 27–28 March 2015. [Google Scholar]
- Zhao, G.-Z.; Huang, X.; Peng, X. Adaptive Model Predictive Control Research on Regenerative Braking for Electric Bus Cruising Downhill. J. Adv. Manuf. Syst. 2016, 15, 133–150. [Google Scholar] [CrossRef]
- Halmeaho, T.; Rahkola, P.; Tammi, K.; Pippuri, J.; Pellikka, A.-P.; Manninen, A.; Ruotsalainen, S. Experimental validation of electric bus powertrain model under city driving cycles. IET Electr. Syst. Transp. 2017, 7, 74–83. [Google Scholar] [CrossRef]
- Kivekäs, K.; Lajunen, A.; Vepsäläinen, J.; Tammi, K. City Bus Powertrain Comparison: Driving Cycle Variation and Passenger Load Sensitivity Analysis. Energies 2018, 11, 1755. [Google Scholar] [CrossRef]
- Vepsäläinen, J.; Kivekäs, K.; Otto, K.; Lajunen, A.; Tammi, K. Development and validation of energy demand uncertainty model for electric city buses. Transp. Res. Part D Transp. Environ. 2018, 63, 347–361. [Google Scholar] [CrossRef]
- Yan, M.; Li, M.; He, H.; Peng, J.; Sun, C. Rule-based energy management for dual-source electric buses extracted by wavelet transform. J. Clean. Prod. 2018, 189, 116–127. [Google Scholar] [CrossRef]
- Yu, L.; Kong, D.; Yan, X. A Driving Behavior Planning and Trajectory Generation Method for Autonomous Electric Bus. Future Internet 2018, 10, 51. [Google Scholar] [CrossRef]
- Shen, P.; Zhao, Z.; Li, J.; Zhan, X. Development of a typical driving cycle for an intra-city hybrid electric bus with a fixed route. Transp. Res. Part D Transp. Environ. 2018, 59, 346–360. [Google Scholar] [CrossRef]
- Leou, R.-C.; Hung, J.-J. Optimal Charging Schedule Planning and Economic Analysis for Electric Bus Charging Stations. Energies 2017, 10, 483. [Google Scholar] [CrossRef]
- Bak, D.-B.; Bak, J.-S.; Kim, S.-Y. Strategies for Implementing Public Service Electric Bus Lines by Charging Type in Daegu Metropolitan City, South Korea. Sustainability 2018, 10, 3386. [Google Scholar] [CrossRef]
- Gao, Y.; Guo, S.; Ren, J.; Zhao, Z.; Ehsan, A.; Zheng, Y. An Electric Bus Power Consumption Model and Optimization of Charging Scheduling Concerning Multi-External Factors. Energies 2018, 11, 2060. [Google Scholar] [CrossRef]
- Lajunen, A. Lifecycle costs and charging requirements of electric buses with different charging methods. J. Clean. Prod. 2018, 172, 56–67. [Google Scholar] [CrossRef]
- Rogge, M.; van der Hurk, E.; Larsen, A.; Sauer, D.U. Electric bus fleet size and mix problem with optimization of charging infrastructure. Appl. Energy 2018, 211, 282–295. [Google Scholar] [CrossRef]
- Bi, Z.; Keoleian, G.A.; Ersal, T. Wireless charger deployment for an electric bus network: A multi-objective life cycle optimization. Appl. Energy 2018, 225, 1090–1101. [Google Scholar] [CrossRef]
- Jang, Y.J.; Suh, E.S.; Kim, J.W. System Architecture and Mathematical Models of Electric Transit Bus System Utilizing Wireless Power Transfer Technology. IEEE Syst. J. 2016, 10, 495–506. [Google Scholar] [CrossRef]
- Kotiev, G.O.; Butarovich, D.O.; Kositsyn, B.B. Energy efficient motion control of the electric bus on route. IOP Conf. Ser. Mater. Sci. Eng. 2018, 315, 12014. [Google Scholar] [CrossRef] [Green Version]
- Cho, C.-W.; Lee, H.-S.; Won, J.-P.; Lee, M.-Y. Measurement and Evaluation of Heating Performance of Heat Pump Systems Using Wasted Heat from Electric Devices for an Electric Bus. Energies 2012, 5, 658–669. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Li, W.; Shi, J.; Chen, J. A Study on Electric Vehicle Heat Pump Systems in Cold Climates. Energies 2016, 9, 881. [Google Scholar] [CrossRef]
- He, H.; Yan, M.; Sun, C.; Peng, J.; Li, M.; Jia, H. Predictive air-conditioner control for electric buses with passenger amount variation forecast. Appl. Energy 2018, 227, 249–261. [Google Scholar] [CrossRef]
- Xiong, X.; Wang, Y.; Zhong, Y. Modeling and analysis in air conditioning control system based on electric bus. In Proceedings of the 2017 IEEE 17th International Conference on Communication Technology (ICCT), Chengdu, China, 27–30 October 2017. [Google Scholar]
- Yan, M.; He, H.; Jia, H.; Li, M.; Xue, X. Model Predictive Control of the Air-conditioning System for Electric Bus. Energy Procedia 2017, 105, 2415–2421. [Google Scholar] [CrossRef]
- Wu, X.; Lv, S.; Chen, J. Determination of the Optimum Heat Transfer Coefficient and Temperature Rise Analysis for a Lithium-Ion Battery under the Conditions of Harbin City Bus Driving Cycles. Energies 2017, 10, 1723. [Google Scholar] [CrossRef]
- Turoń, K.; Czech, P.; Juzek, M. The concept of a walkable city as an alternative form of urban mobility. Sci. J. Sil. Univ. Technol.-Ser. Transp. 2017, 95, 223–230. [Google Scholar] [CrossRef]
- Kurek, A.; Jużyniec, J.; Kielc, B. Analysis of road safety in the city of Sosnowiec in the period 2006–2016. Sci. J. Sil. Univ. Technol.-Ser. Transp. 2018, 100, 69–79. [Google Scholar] [CrossRef]
- Czech, P.; Turon, K.; Barcik, J. Autonomous Vehicles: Basic Issues. Sci. J. Sil. Univ. Technol. Ser. Transp. 2018, 15–22. [Google Scholar] [CrossRef]
- Skrúcaný, T.; Šarkan, B.; Figlus, T.; Synák, F.; Vrábel, J. Measuring of noise emitted by moving vehicles. MATEC Web Conf. 2017, 107, 72. [Google Scholar] [CrossRef] [Green Version]
- Yamamoto, A.; Fukuda, M.; Utsumi, H. Vehicle Management and Travel Data Analysis of E-Bus Adopted in JR Kesennuma Line. WEVJ 2016, 8, 122–130. [Google Scholar] [CrossRef] [Green Version]
- Łebkowski, A. Temperature, Overcharge and Short-Circuit Studies of Batteries used in Electric Vehicles. Przegląd Elektrotechniczny 2017, 1, 69–75. [Google Scholar] [CrossRef]
- Nørregaard, K.; Johnsen, B.; Hedegaard Gravesen, C. Battery degradation in electric buses. 2016. Available online: https://www.trafikstyrelsen.dk/~/media/Dokumenter/06%20Kollektiv%20trafik/Forsogsordningen/2013/Elbusser/Battery%20degradation%20in%20electric%20buses%20-%20final.pdf (accessed on 27 February 2019).
- Łebkowski, A. Steam and Oxyhydrogen Addition Influence on Energy Usage by Range Extender—Battery Electric Vehicles. Energies 2018, 11, 2403. [Google Scholar] [CrossRef]
- Global Carbon Dioxide Emissions Rose Almost 3% in 2018|CBC News. Available online: https://www.cbc.ca/news/technology/carbon-pollution-increase-1.4934096 (accessed on 25 January 2019).
- The Global Fuel Economy Initiative. International Test Cycles for Emissions and Fuel Economy. Available online: https://www.globalfueleconomy.org/transport/gfei/autotool/approaches/information/test_cycles.asp#pg (accessed on 27 January 2019).
- US EPA. Vehicle and Fuel Emissions Ttesting-Dynamometer Drive Schedules. Available online: https://www.epa.gov/vehicle-and-fuel-emissions-testing/dynamometer-drive-schedules (accessed on 27 January 2019).
- DieselNet. Emission Test Cycles. Available online: https://www.dieselnet.com/standards/cycles/index.php (accessed on 27 January 2019).
- European Commission. COMMISSION RECOMMENDATION of 31.5.2017 on the use of fuel consumption and CO2 emission values type-approved and measured in accordance with the World Harmonised Light Vehicles Test Procedure when making information available for consumers pursuant to Directive 1999/94/EC of the European Parliament and of the Council; European Commission: Brussels, Belgium, 2017. [Google Scholar]
- UNECE. World Forum for Harmonization of Vehicle Regulations. Available online: http://www.unece.org/trans/main/wp29/meeting_docs_wp29.html (accessed on 27 January 2019).
- Gis, W.; Kruczyński, S.; Taubert, S.; Wierzejsk, A. Studies of energy use by electric buses in SORT tests. Combust. Engines 2017, 135–138. [Google Scholar] [CrossRef]
- Live CO2 Emissions of Electricity Consumption. Available online: https://www.electricitymap.org/ (accessed on 1 February 2019).


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | BEV (LFP) | BEV (LTO) | BEV (LFP) SUPCAP | SUPCAP BEV (LFP) | SUPCAP | Diesel |
|---|---|---|---|---|---|---|---|
| Body mass | (kg) | 9800 | 9800 | 9800 | 9800 | 9800 | 9800 |
| Motor mass | (kg) | 300 | 300 | 300 | 300 | 300 | 1200 |
| Inverter mass | (kg) | 40 | 40 | 40 | 40 | 40 | - |
| Motor power | (kW) | 250 | 250 | 250 | 250 | 250 | 270 |
| Battery mass | (kg) | 1241 | 1625 | 1241 | 336 | - | - |
| Battery energy | (kWh) | 120 | 120 | 120 | 38 | - | - |
| SUPCAP mass | (kg) | - | - | 275 (5 pcs.) | 1100 (20 pcs.) | 1 650 (30 pcs.) | - |
| SUPCAP energy | (kWh) | - | - | 0.7 | 2.9 | 4.3 | - |
| Power electronics mass | (kg) | 30 | 30 | 30 | 30 | 30 | - |
| Electrical switching equip | (kg) | 50 | 50 | 50 | 50 | 50 | - |
| SUPCAP Inverter | (kg) | - | - | 45 | 45 | 45 | - |
| Gearbox | (kg) | - | - | - | - | - | 400 |
| Fuel tank | (kg) | - | - | - | - | - | 350 |
| Powertrain total mass | (kg) | 1661 | 2045 | 1981 | 1901 | 2115 | 850 |
| Vehicle total mass | (kg) | 11,461 | 11,845 | 11,781 | 11,701 | 11,915 | 11,750 |
| Passengers mass | (kg) | 5590 | 5590 | 5590 | 5590 | 5590 | 5590 |
| Fully loaded vehicle mass | (kg) | 17,251 | 17,635 | 17,571 | 17,491 | 17,705 | 17,540 |
| GVWR | (kg) | 18,000 | 18,000 | 18,000 | 18,000 | 18,000 | 18,000 |
| Test Cycle | Unit | BEV (LTO) | BEV (LFP) | BEV (LFP) SUPCAP | SUPCAP BEV (LFP) | SUPCAP | DIESEL |
|---|---|---|---|---|---|---|---|
| SORT 1 | Wh/km | 967.8 | 990.5 | 1016.2 | 1239.9 | 1239.9 | 5793.2 |
| SORT 2 | Wh/km | 841.2 | 870.6 | 893.3 | 1030.6 | 1041.5 | 4703.3 |
| SORT 3 | Wh/km | 787.2 | 816.8 | 839.8 | 935.3 | 945.9 | 4297.2 |
| UDDS-HD | Wh/km | 924.6 | 949.4 | 972.6 | 1038.2 | 1246.8 | 4067.1 |
| OCBC | Wh/km | 982.7 | 997.5 | 1037.4 | 1083.4 | 1106.3 | 5205.3 |
| MBC | Wh/km | 1300.1 | 1315.2 | 1373.2 | 1495.2 | 1531.1 | 7127.3 |
| BCDC | Wh/km | 1020.6 | 1010.2 | 1138.1 | 1289.0 | 1297.2 | 4869.9 |
| Gdynia-Flat | Wh/km | 788.2 | 816.1 | 838.5 | 988.2 | 988.2 | 3730.4 |
| Gdynia-Hills | Wh/km | 855.5 | 913.5 | 941.3 | 1087.6 | 1091.3 | 3967.2 |
| Average | Wh/km | 940.9 | 964.4 | 1005.6 | 1131.9 | 1165.4 | 4862.3 |
| Passenger # | Total Energy (kWh) | Energy Consumption (Wh/km) | Range (km) | SOC at End (%) | Start Temperature (°C) | End Temperature (°C) |
|---|---|---|---|---|---|---|
| 20 | 15.18 | 624.54 | 192.11 | 84.64 | 18 | 24.23 |
| 40 | 16.57 | 681.80 | 175.98 | 83.47 | 18 | 24.86 |
| 60 | 18.05 | 742.91 | 161.53 | 82.22 | 18 | 25.48 |
| 80 | 19.66 | 808.99 | 148.31 | 80.87 | 18 | 26.13 |
| 90 | 20.49 | 842.85 | 142.35 | 80.18 | 18 | 26.46 |
| Ambient Temperature (°C) | Total Energy (kWh) | Energy Consumption (Wh/km) | Range (km) | SOC at End (%) | Start Temperature (°C) | End Temperature (°C) |
|---|---|---|---|---|---|---|
| 30 | 20.74 | 853.21 | 140.63 | 80.05 | 30 | 37.27 |
| 20 | 19.66 | 808.99 | 148.31 | 80.88 | 20 | 28.07 |
| 0 | 32.60 | 1341.41 | 89.45 | 70.16 | 0 | 13.25 |
| −5 | 35.85 | 1475.22 | 81.33 | 67.34 | −5 | 11,68 |
| −10 | 39.10 | 1608.67 | 74.58 | 64.50 | −10 | 10.61 |
| Ambient Temperature (°C) | Total Energy (kWh) | Energy Consumption (Wh/km) | Range (km) | SOC at End (%) | Start Temperature (°C) | End Temperature (°C) |
|---|---|---|---|---|---|---|
| 30 | 20.74 | 853.21 | 140.63 | 80.05 | 30 | 37.27 |
| 20 | 19.66 | 808.99 | 148.31 | 80.88 | 20 | 28.07 |
| 0 | 21.82 | 897.68 | 133.66 | 78.90 | 0 | 12.34 |
| −5 | 22.36 | 919.98 | 130.42 | 78.27 | −5 | 10.69 |
| −10 | 22.90 | 942.21 | 127.34 | 77.62 | −10 | 9.47 |
| Test Cycle | Unit | BEV (LTO) | BEV (LFP) | BEV (LFP) SUPCAP | SUPCAP BEV (LFP) | SUPCAP | DIESEL |
|---|---|---|---|---|---|---|---|
| SORT 1 | kg/CO2eq/kWh | 1.8 | 1.8 | 1.8 | 2.3 | 2.3 | 4.0 |
| SORT 2 | kg/CO2eq/kWh | 2.7 | 2.8 | 2.9 | 3.3 | 3.4 | 5.7 |
| SORT 3 | kg/CO2eq/kWh | 4.0 | 4.1 | 4.3 | 4.7 | 4.8 | 8.2 |
| UDDS-HD | kg/CO2eq/kWh | 11.6 | 11.9 | 12.2 | 13.0 | 4.3 | 19.1 |
| OCBC | kg/CO2eq/kWh | 7.2 | 7.3 | 7.6 | 8.0 | 8.1 | 14.4 |
| MBC | kg/CO2eq/kWh | 6.0 | 6.1 | 6.4 | 6.9 | 7.1 | 12.5 |
| BCDC | kg/CO2eq/kWh | 7.7 | 7.6 | 8.6 | 9.7 | 9.8 | 13.9 |
| Gdynia-Flat | kg/CO2eq/kWh | 54.7 | 56.7 | 58.2 | 68.6 | 68.6 | 97.6 |
| Gdynia-Hills | kg/CO2eq/kWh | 59.6 | 63.6 | 65.6 | 75.8 | 76.0 | 104.1 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Łebkowski, A. Studies of Energy Consumption by a City Bus Powered by a Hybrid Energy Storage System in Variable Road Conditions. Energies 2019, 12, 951. https://doi.org/10.3390/en12050951
Łebkowski A. Studies of Energy Consumption by a City Bus Powered by a Hybrid Energy Storage System in Variable Road Conditions. Energies. 2019; 12(5):951. https://doi.org/10.3390/en12050951
Chicago/Turabian StyleŁebkowski, Andrzej. 2019. "Studies of Energy Consumption by a City Bus Powered by a Hybrid Energy Storage System in Variable Road Conditions" Energies 12, no. 5: 951. https://doi.org/10.3390/en12050951
APA StyleŁebkowski, A. (2019). Studies of Energy Consumption by a City Bus Powered by a Hybrid Energy Storage System in Variable Road Conditions. Energies, 12(5), 951. https://doi.org/10.3390/en12050951