Study on Design and Vibration Reduction Optimization of High Starting Torque Induction Motor


Abstract
:1. Introduction
2. Prototype Parameters and Magnetic Field Calculation
2.1. Prototype Parameters
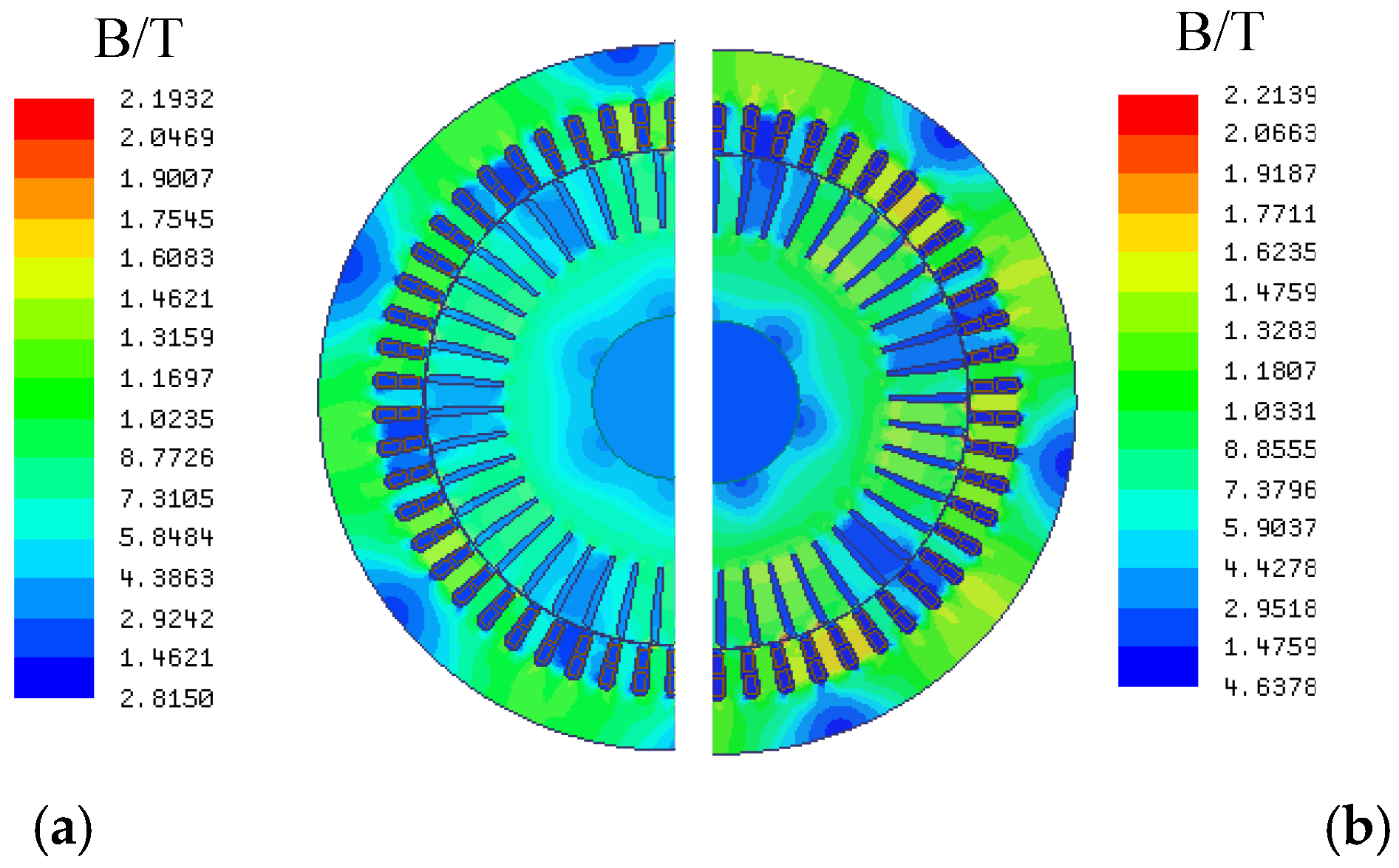
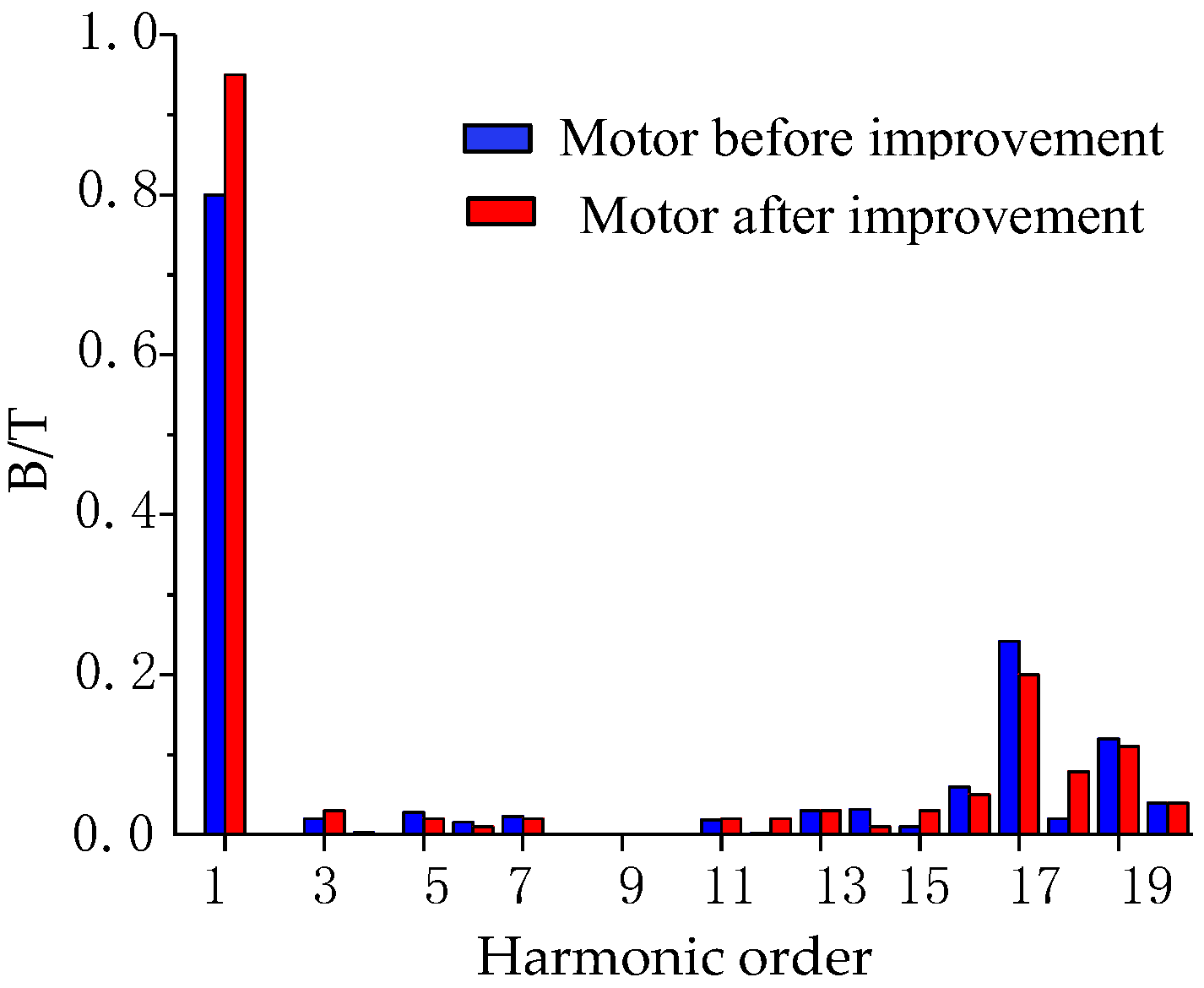
2.2. Calculation of the Magnetic Field and Starting Performance
3. Calculation and Analysis of Electromagnetic Vibration
3.1. Time-Domain Characteristics of Electromagnetic Force Waves
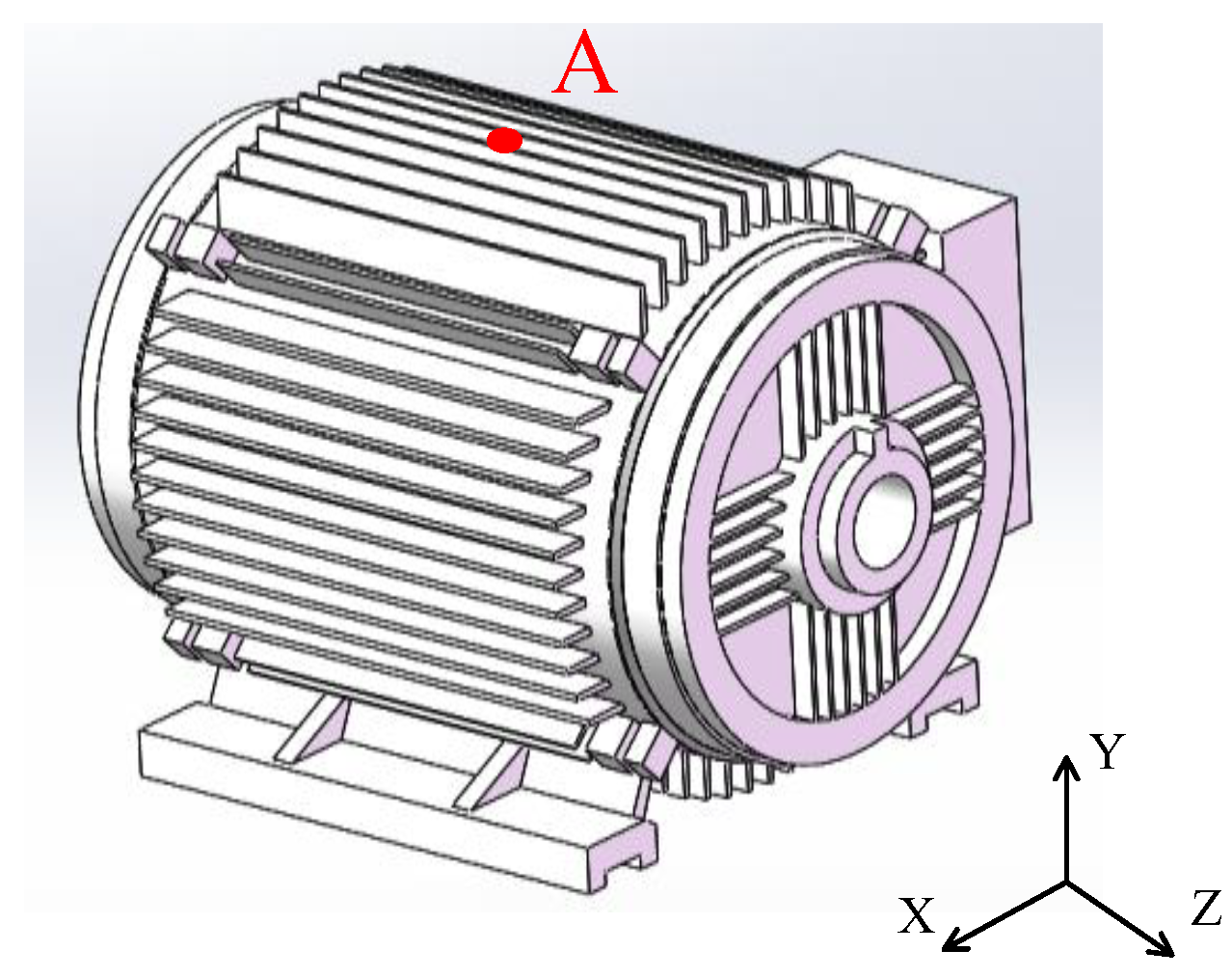
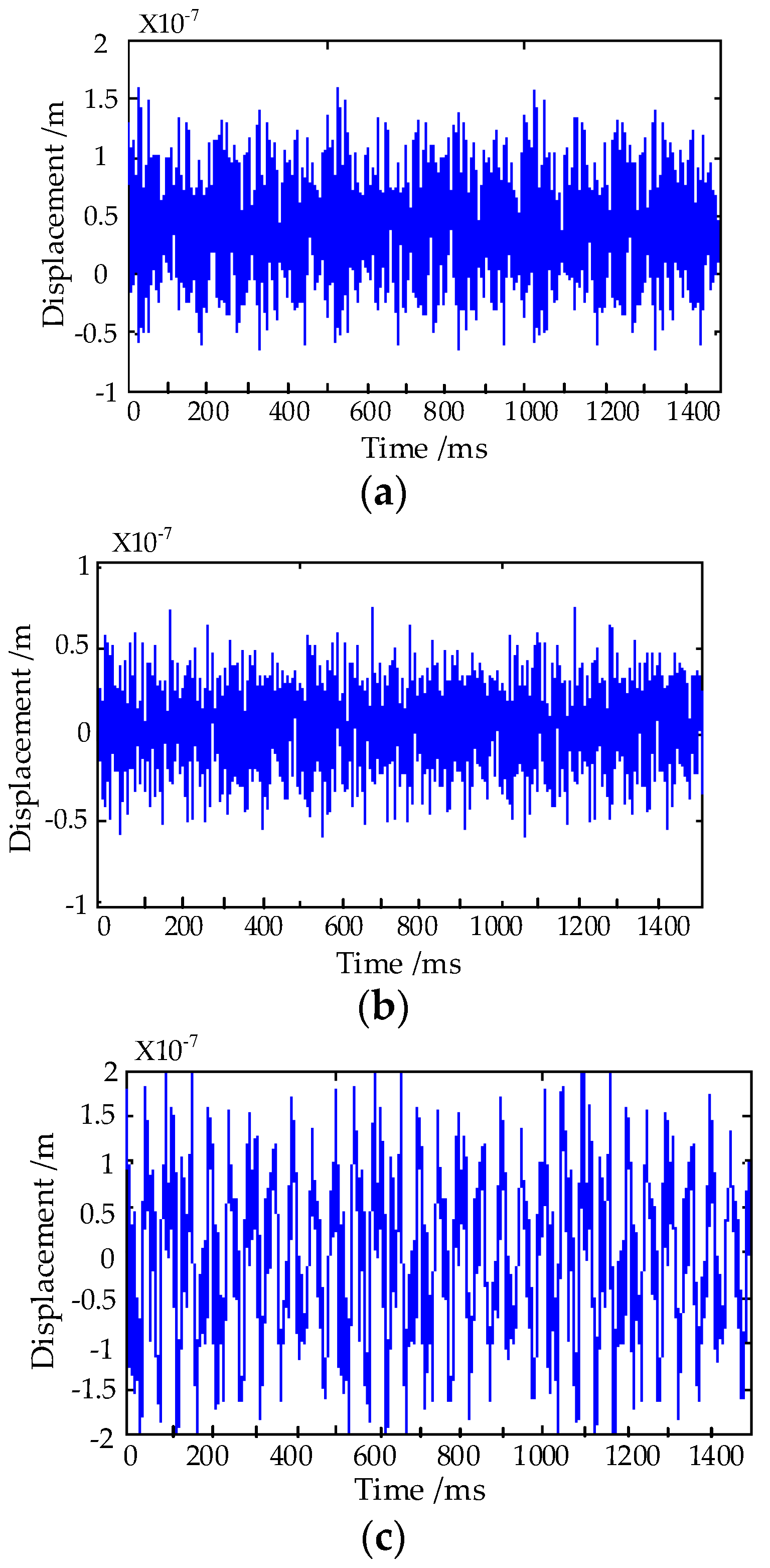
3.2. Time-Domain Calculation and Analysis of Electromagnetic Vibration
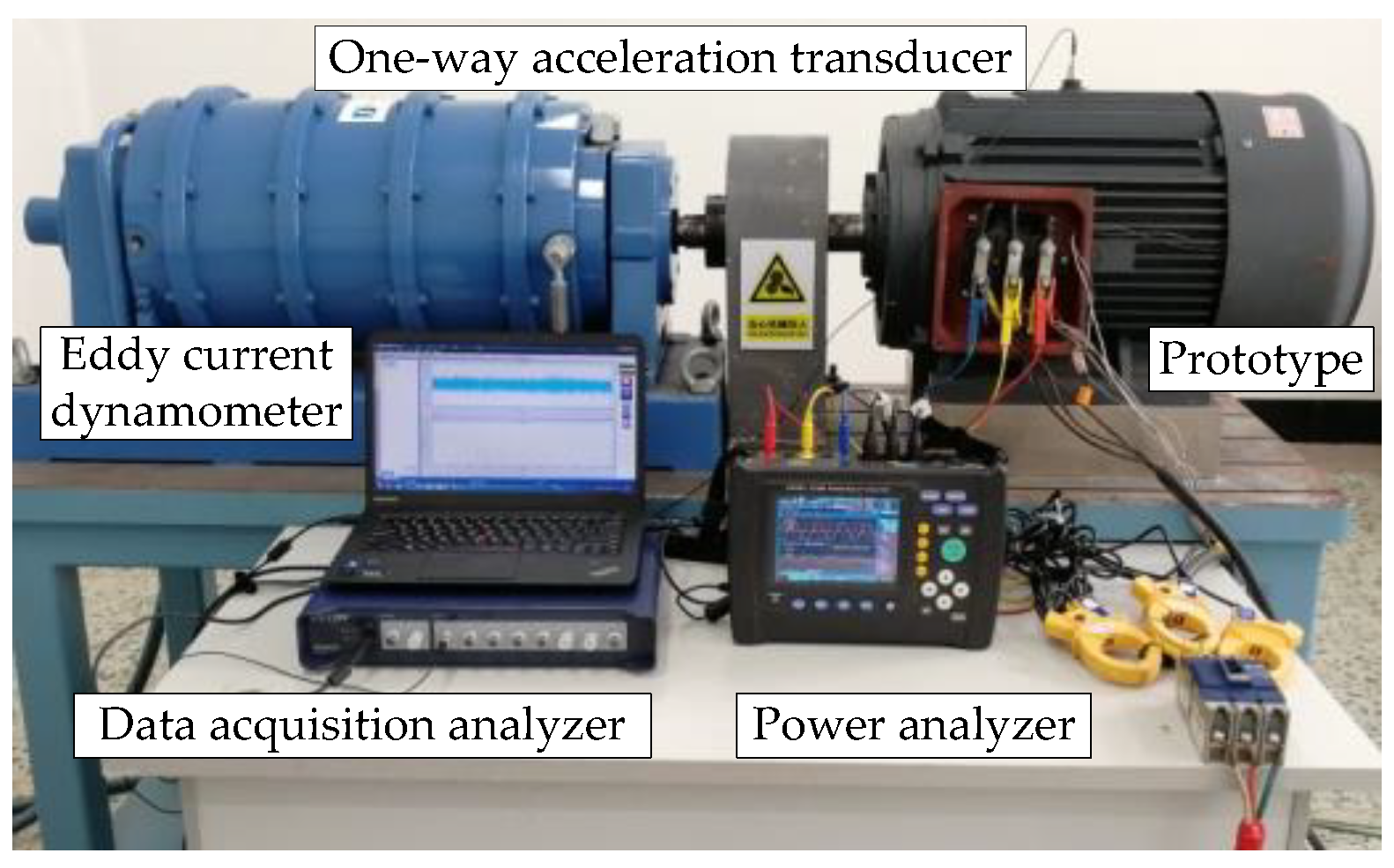
3.3. Comparison of Calculation and Experiment of Electromagnetic Vibration
4. The Optimal Design for the Stator Winding of Vibration Reduction
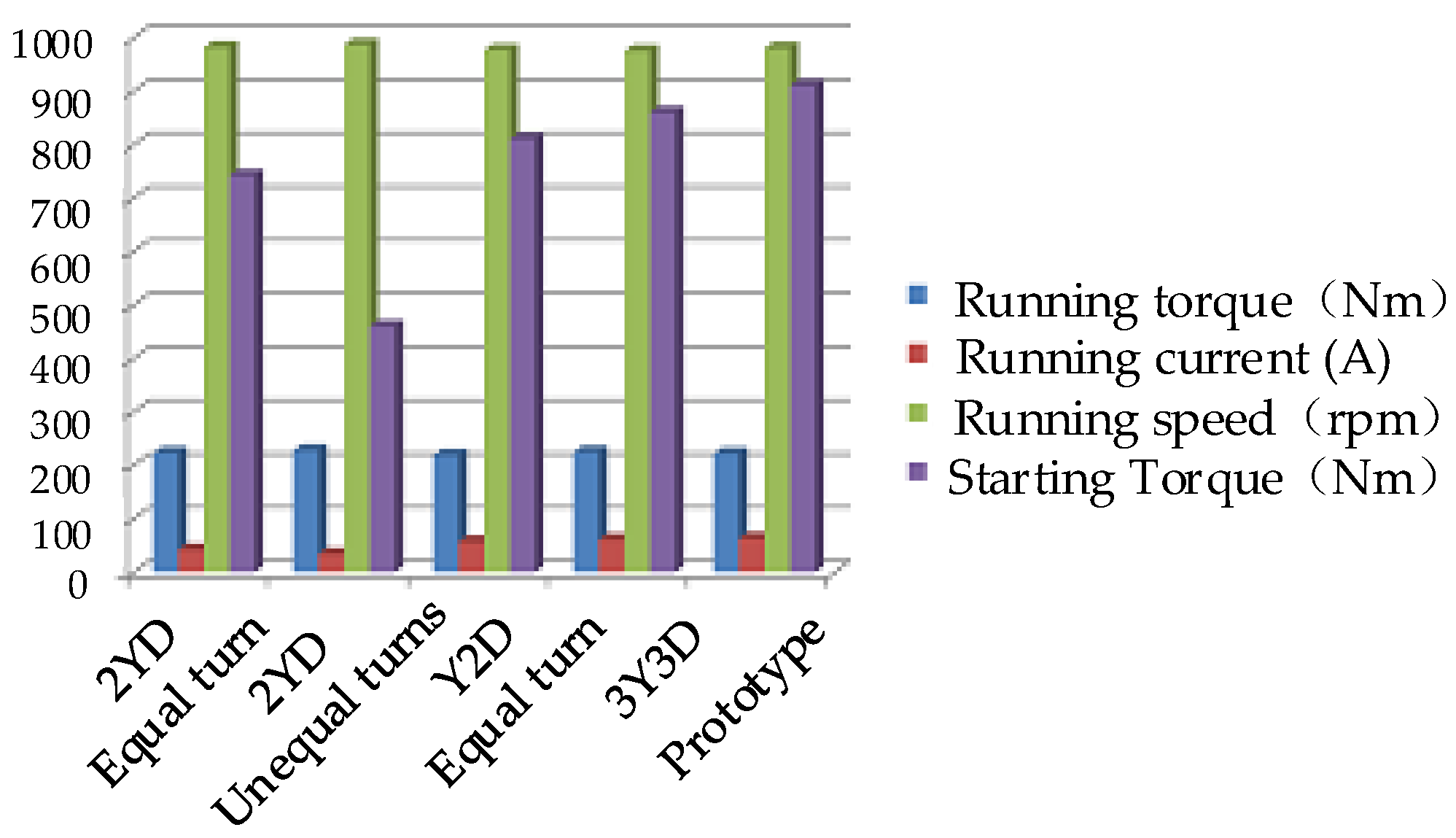
4.1. Winding Optimization Scheme
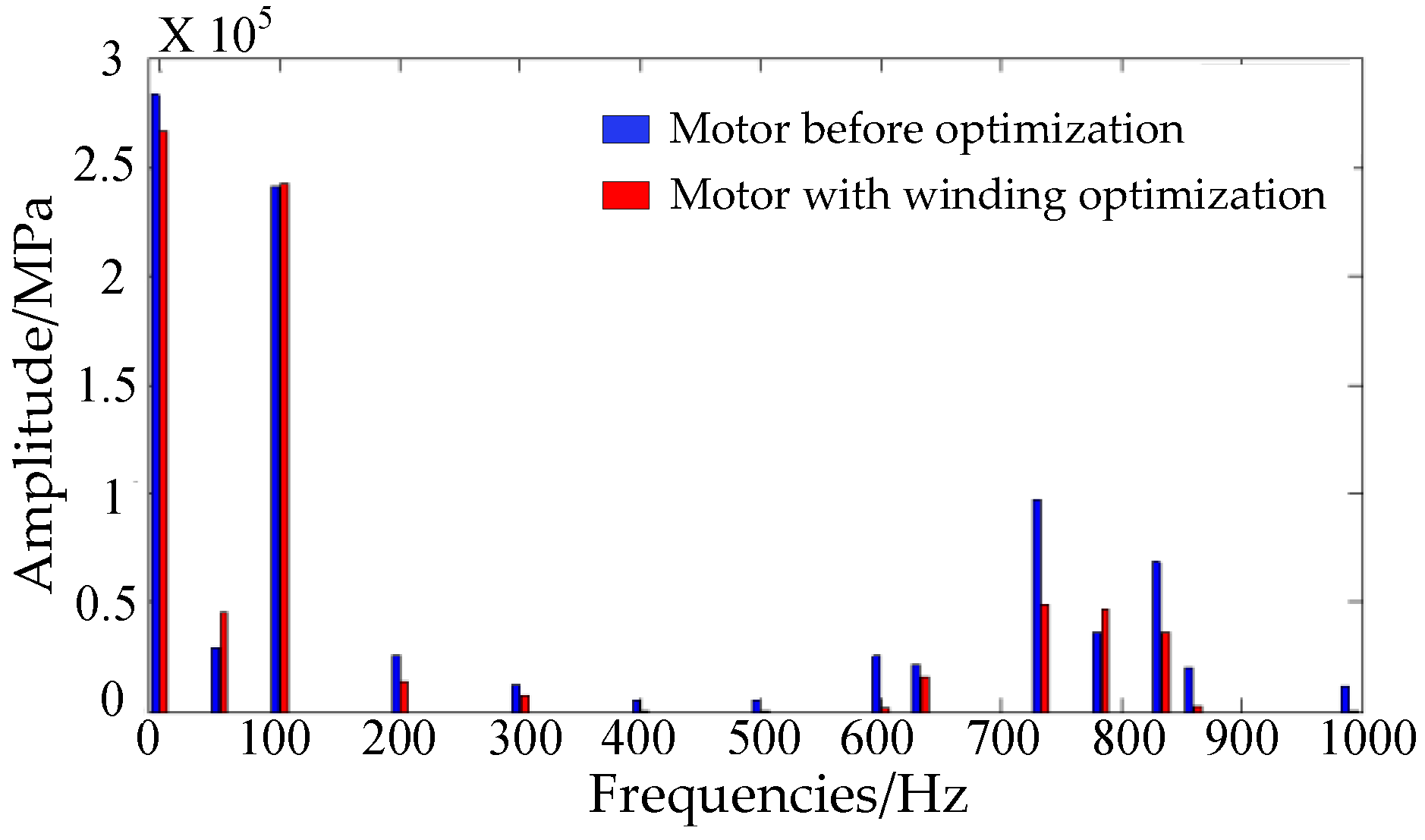
4.2. Electromagnetic Vibration Before and After Winding Optimization
5. Conclusions
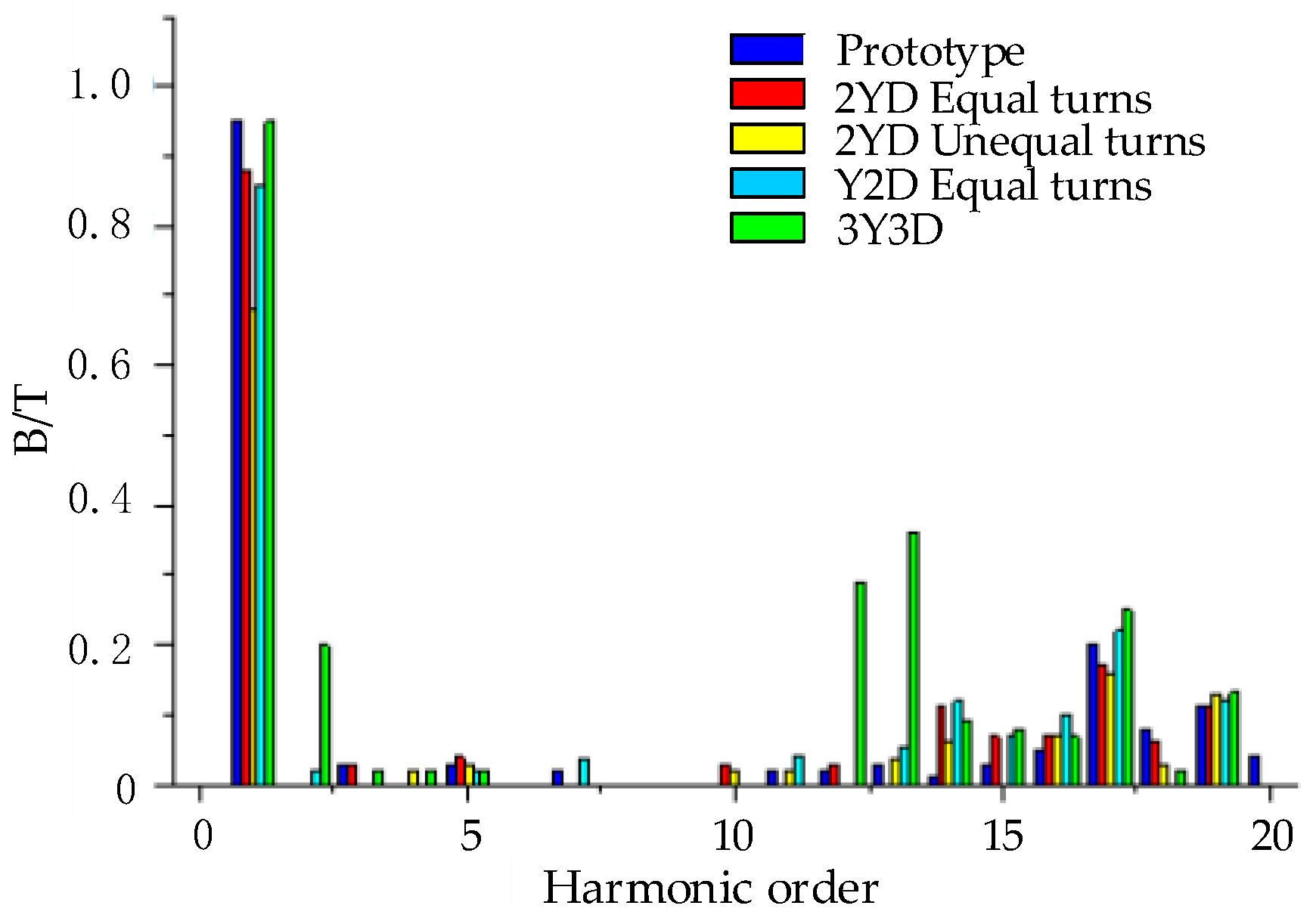
- The starting torque of the improved motor has been significantly increased, and the air gap flux density waveform was effectively improved, that is, the amplitude of the fundamental wave increased, and the fifth- and seventh-order harmonics were effectively weakened.
- By analyzing the radial vibration displacement of the prototype in the time domain and frequency domain, it can be observed that the simulation results are consistent with the experimental results, which confirms the reliability of the calculation method proposed in this paper. Because the influence of mechanical vibration and other factors were not considered in the simulation process, the simulation result was slightly smaller than the experimental value.
- In this paper, the optimal design scheme for vibration reduction windings was proposed. The adopted stator winding design of 2YD (equal turns) can ensure that the starting performance of the motor is not significantly affected, meanwhile, the motor has better magnetic field characteristics and operation performance.
- After winding optimization, the amplitude and fluctuation of the electromagnetic force of the motor were evidently reduced, and the corresponding vibration displacement of the motor was evidently reduced, especially in the Y direction, which means the object of optimization design was reached. In addition, the radial vibration displacement was larger than the axial vibration displacement.
- This paper designs a high-start torque induction motor for oil field operations, which meets the requirements of high starting torque and low load operation. At the same time, the vibration reduction optimization method proposed in this paper can provide a reference for the vibration reduction design of other types of induction motors.
Author Contributions
Funding
Conflicts of Interest
References
- Wang, J. Research of Δ-Y connected low harmonic winding. Electr. Mach. Technol. 1996, 17–41. [Google Scholar]
- Zhang, C.; Yang, G.; Meng, S. Efficiency of three-phase induction motors with a connected stator winding. J. Huazhong Univ. Sci. Technol. 1983, 11, 91–96. (In Chinese) [Google Scholar]
- Auinger, H.; Fei, Y. Three-phase winding uses star-delta hybrid connection to reduce copper consumption and harmonic components. Medium Small Mot. 1984, 58–65. Available online: http://kns.cnki.net/KCMS/detail/detail.aspx?dbcode=CJFQ&dbname=CJFD7984&filename=ZXXD198403018&uid=WEEvREdxOWJmbC9oM1NjYkZCbDdrdW1OMEorK2tRNWZlVlBBR1VUZkhGd2w=$R1yZ0H6jyaa0en3RxVUd8df-oHi7XMMDo7mtKT6mSmEvTuk11l2gFA!!&v=MzAxMjRhckt4RnRYTXJJOUViSVI4ZVgxTHV4WVM3RGgxVDNxVHJXTTFGckNVUkxPZlkrWnVGQ25sVTdyTVB6WFQ= (accessed on 2 April 2019).
- Zou, C. Three-phase star—Some key issues of triangular winding–theoretical design and manufacturing and repair practice. Mot. Technol. 1989, 11–14. [Google Scholar]
- Yang, Y. Harmonic analysis of star and triangular sinusoidal windings and its new type. Mot. Technol. 2009, 6–10. Available online: http://kns.cnki.net/KCMS/detail/detail.aspx?dbcode=CJFQ&dbname=CJFD2009&filename=DJIJ200901004&uid=WEEvREdxOWJmbC9oM1NjYkZCbDdrdW1OMEorK2tRNWZlVlBBR1VUZkhGd2w=$R1yZ0H6jyaa0en3RxVUd8df-oHi7XMMDo7mtKT6mSmEvTuk11l2gFA!!&v=MDEyNTh6UElTZkNaTEc0SHRqTXJvOUZZSVI4ZVgxTHV4WVM3RGgxVDNxVHJXTTFGckNVUkxPZlkrWnVGQ25sVnI= (accessed on 2 April 2019).
- Kan, C.; Xia, B.; Liu, Q.; Chen, P.; Li, H. Research on brushless doubly-fed machine with star-delta connection of rotor winding. Micromotor 2013, 46, 6–9. [Google Scholar]
- Yamazaki, K. Comparison of induction motor characteristics calculated from electromagnetic field and equivalent circuit determined by 3D FEM. IEEE Trans. Magn. 2000, 36, 1881–1885. [Google Scholar] [CrossRef]
- McDevitt, T.E.; Campbell, R.L.; Jenkins, D.M. An investigation of induction motor zeroth-order magnetic stresses, vibration and sound radiation. IEEE Trans. Magn. 2004, 40, 774–777. [Google Scholar] [CrossRef]
- He, H.; Liu, H. Radial electromagnetic radial force analysis in induction motors. Micromotors 2011, 44, 26–30. [Google Scholar]
- Lang, W.; Xiao, B.; Chong, D.; Yang, Z. Influence on vibration and noise of squirrel-cage induction machine with double skewed rotor for different slot combinations. IEEE Trans. Magn. 2016, 52, 8104404. [Google Scholar]
- Kapitaniak, T.; Bishop, S. A Dictionary of Nonlinear Dynamics; Wiley: Chichester, UK, 1999. [Google Scholar]
- Muscolino, G. Non-stationary pre-envelope covariances of non-classically damped systems. J. Sound Vib. 1988, 149, 107–123. [Google Scholar] [CrossRef]
- Kamiński, M.; Corigliano, A. Numerical solution of the Duffing equation with random coefficients. Meccanica 2015, 50, 1841–1853. [Google Scholar] [CrossRef] [Green Version]
- Han, X.; Li, S.; Mi, X. Research on radial magnetic force of permanent magnet synchronous motor supplied by sine wave. Adv. Technol. Electr. Eng. Energy 2016, 3, 1–5. [Google Scholar]
- Yang, H.; Chen, Y. Electromagnetic vibration analysis and suppression of permanent magnet synchronous motor with fractional slot combination. Proc. CSEE 2011, 3, 1–5. [Google Scholar]
- Toru, I.; Akatsu, K. Electromagnetic sorce acquisition distributed in electric motor to reduce vibration. IEEE Trans. Ind. Appl. 2016, 53, 1001–1008. [Google Scholar]
- Wang, D.; Zhu, C.; Fu, J. Electromagnetically excited vibration analysis for an asynchronous electrical machine with finite element method. J. Vib. Shock 2012, 31, 140–144. [Google Scholar]
- Dai, Y.; Cui, S.; Zhang, Q. Analysis on electromagnetic vibration/noise of induction motors for EV drives. Proc. CSEE 2012, 32, 89–97. [Google Scholar]
- Xie, Y.; Liu, H.; Lv, S.; Liu, H. Study on electromagnetic vibration of cage induction motor considering rotor chute. Proc. Chin. J. Electr. Eng. 2015, 35, 3952–3954. [Google Scholar]
- Xie, Y.; Liu, H. Study on the variation laws of electromagnetic vibration considered the skewed rotor in a squirrel-cage induction motor. Proc. CSEE 2015, 35, 3952–3954. [Google Scholar]
- Long, S.A.; Zhu, Z.Q.; Howe, D. Vibration behaviour of stators of switched reluctance motors. IEEE Proc. Electr. Power Appl. 2001, 148, 257–264. [Google Scholar] [CrossRef]
- Hwang, S.M.; Lee, H.J.; Kim, T.S.; Jung, Y.H.; Hong, J.P. The influence of electromagnetic force upon the noise of an IPM motor used in a compressor. IEEE Trans. Magn. 2006, 42, 3494–3496. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, X.H.; Qiao, D.W.; Yang, Y.B. Reduction of exciting force wave for permanent magnet motors by teeth notching. Proc. CSEE 2010, 30, 103–108. [Google Scholar]
- Zang, X.; Xiu, H.; Yang, Y.; Wei, B. Vibration reduction of a switches reluctance motor using new rotor tooth with slot on each side. Proc. CSEE 2015, 35, 1508–1515. [Google Scholar]
- Yan, R.; Wu, Y.; Liu, W.; Zhang, X.; Duan, M. Influence of magmetostriction effect on induction motor vibration. Small Spec. Electr. Mach. 2016, 44, 27–29. [Google Scholar]
- Zuo, S.; Liu, X.; Yu, M.; Wu, X.; Zhang, G. Numerical prediction and analysis of electromagnetic vibration in permanent magnet synchronous motor. Trans. China Electrotech. Soc. 2017, 32, 159–167. [Google Scholar]
- Li, Y.; Liu, J.; Xia, J. Electromagnetically excited vibration calculation and analysis for a three-phase asynchronous motor with finite element method. J. Electr. Eng. 2015, 10, 30–33. [Google Scholar]
- Jang, I.S.; Ham, S.H.; Kim, W.H.; Jin, C.S.; Cho, S.Y. Method for analyzing vibrations due to electromagnetic force in electric motors. IEEE Trans. Magn. 2014, 50, 7007204. [Google Scholar] [CrossRef]
- Immovilli, F.; Bianchini, B.; Cocconcelli, M.; Bellini, A. Bearing fault model for induction motor with externally induced vibration. IEEE Trans. Ind. Electron. 2013, 60, 3408–3418. [Google Scholar] [CrossRef]
- Tang, Y. Electromagnetic Field in Electric Machine, 2nd ed.; Science Press: Beijing, China, 1998. [Google Scholar]
- Yan, D.; Liu, R.; Hu, M. Transient starting performance of squirrel cage induction motor with time-stepping FEM. Electr. Mach. Control 2003, 7, 177–181. [Google Scholar]
- Chen, Y.; Zhu, Z.; Ying, S. Analysis and Control of Motor Noise; Zhejiang University Press: Hangzhou, China, 1987. [Google Scholar]
- Wang, S.; Zhao, Z. Design of sinusoidal hard winding for high voltage asynchronous motors. Trans. China Electrotech. Soc. 2009, 24, 8–13. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated power (kW) | 22 | Rated voltage (V) | 380 |
| Power frequency (Hz) | 50 | Rated speed (rpm) | 980 |
| Stator outer diameter (mm) | 327 | Stator inner diameter (mm) | 230 |
| Number of stator slots | 54 | Number of rotor slots | 44 |
| Air gap length (mm) | 0.5 | Core height (mm) | 245 |
| Starting Performance | Starting Torque-Simulation Value /Nm | Starting Torque-Design Value/Nm | Starting Current Ratio Calculated Value |
|---|---|---|---|
| Motor before improvement | 510 | 530 | 6.34 |
| Motor after improvement | 923 | 914 | 7.973 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Y.; Pi, C.; Li, Z. Study on Design and Vibration Reduction Optimization of High Starting Torque Induction Motor. Energies 2019, 12, 1263. https://doi.org/10.3390/en12071263
Xie Y, Pi C, Li Z. Study on Design and Vibration Reduction Optimization of High Starting Torque Induction Motor. Energies. 2019; 12(7):1263. https://doi.org/10.3390/en12071263
Chicago/Turabian StyleXie, Ying, Cheng Pi, and Zhiwei Li. 2019. "Study on Design and Vibration Reduction Optimization of High Starting Torque Induction Motor" Energies 12, no. 7: 1263. https://doi.org/10.3390/en12071263