Three-Level NPC Inverter Incipient Fault Detection and Classification using Output Current Statistical Analysis

 ,
,  , and
, and 
Abstract
:1. Introduction
- Abrupt faults that suddenly occur, inducing significant changes in the system behavior.
- Gradual faults. These fault types can be considered as a slight but abnormal increasing over time variation in parameters and/or variables of the process.
- Intermittent faults. The immediate effect can be negligible but its repetition may lead to failures.
2. Induction Machine Drive and Fault Description
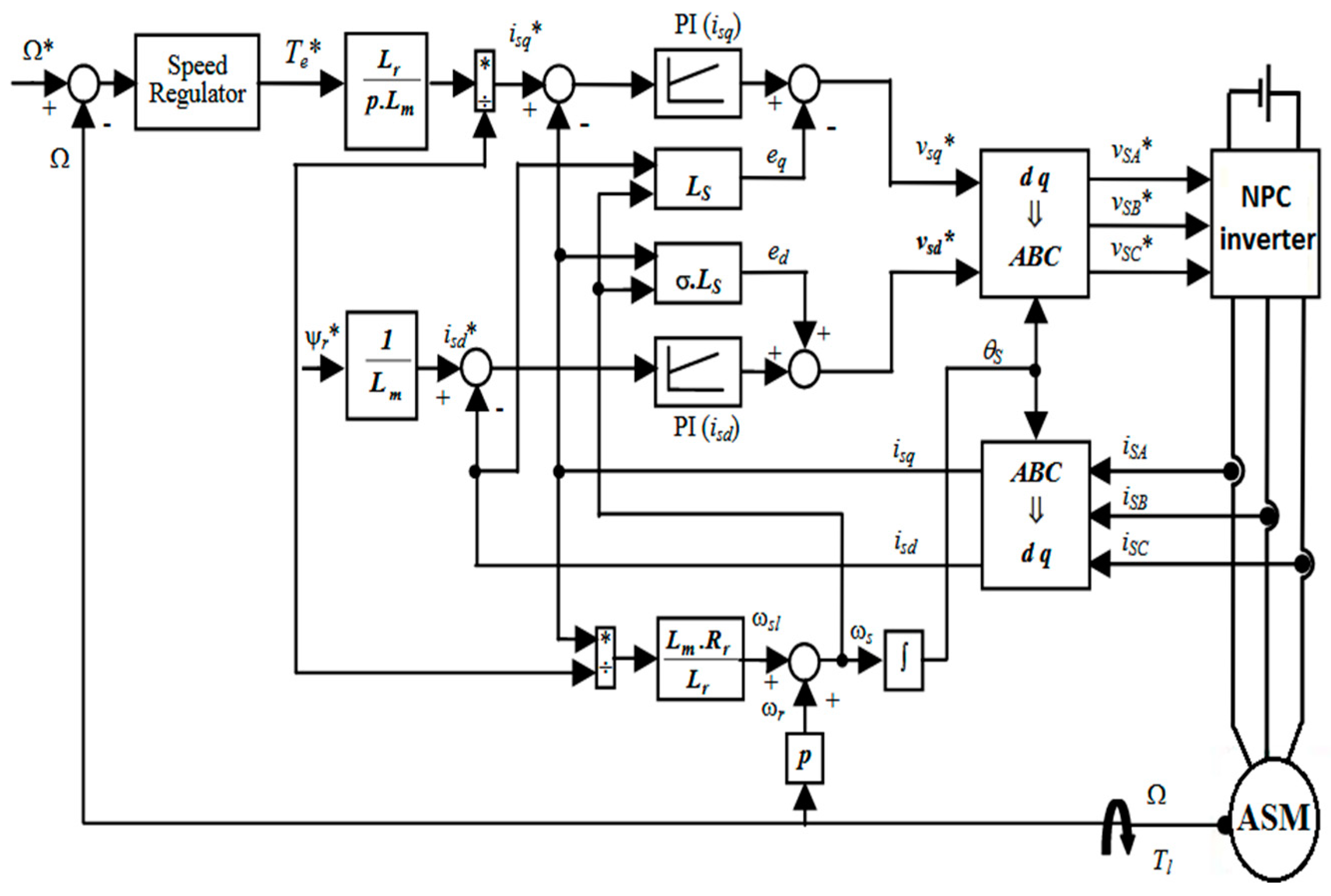
2.1. Description of the Induction Machine Drive
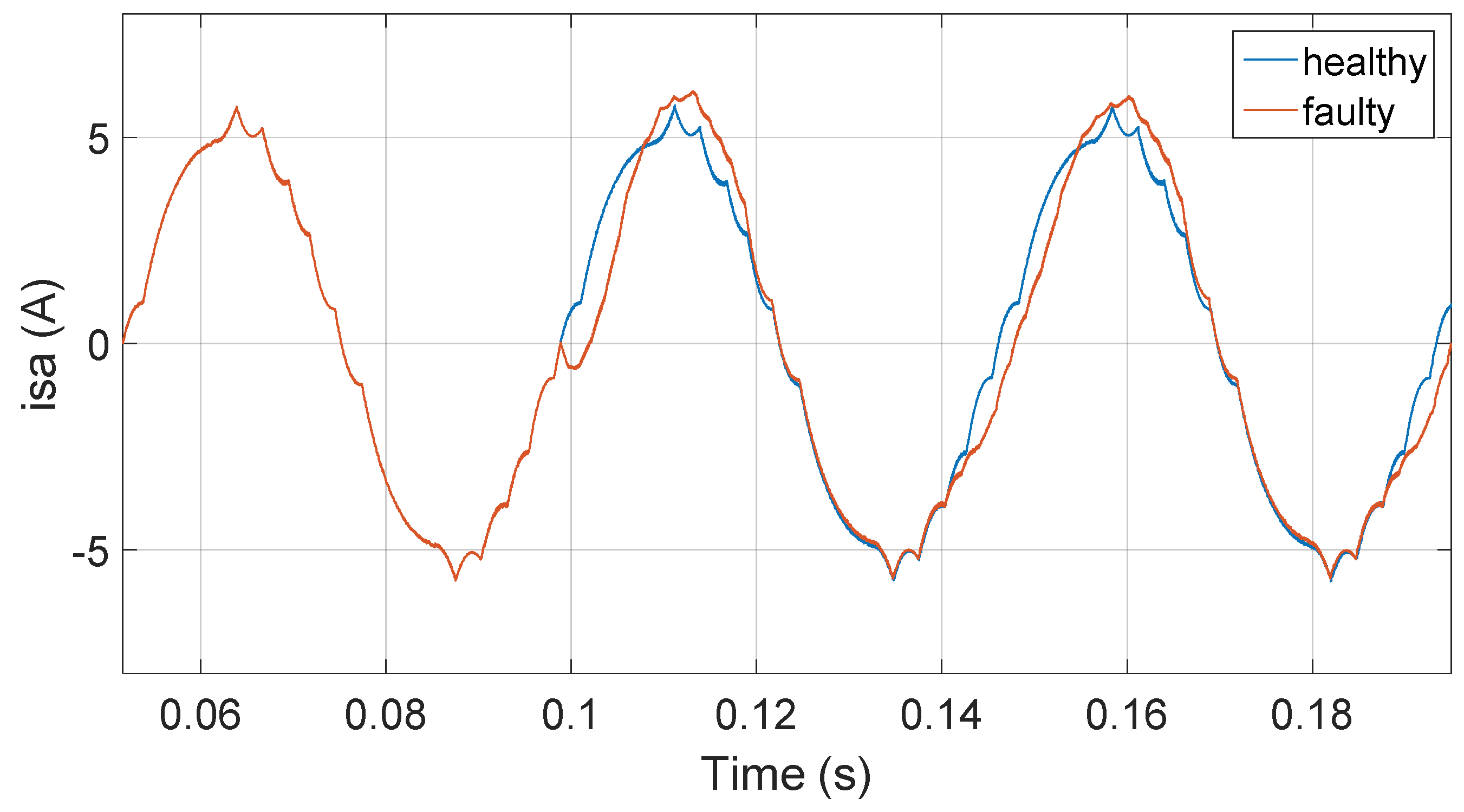
2.2. Fault Impact on Electrical Signals
- Short-Circuit Faults (SCF) that can lead to brutal damages on the switch itself or even on the drive. These faults usually cause the tripping of fuses and, in tolerant structures (conservative design), the turn-on of spare power switches.
- Open-Switch Faults (OSF) that have less immediate negative effect. However, the cumulative effect may lead to non-reversible degradations.
2.3. Fault Description and Operating Conditions
- Three rotating speeds (20, 40, and 60 rad/s) according to the European Urban Driving Cycle (EUDC).
- Three different loads (no load, 50% and 100% of the rated torque).
3. Fault Evaluation Process
3.1. Proposed Methodology
- The first step is the Modeling. In this step, a model describing the behavior of the system is derived. This model can be analytical (i.e., using physical laws describing the system), linguistic (i.e., using a linguistic description of the system), or data driven (i.e., using data history from the system). In the proposed work, a data driven-based approach is considered. The drive is simulated for different conditions of noise, OSF durations, and operating points (load and speed).
- The second step is the pre-processing. The collected data is pre-processed in the appropriate operating domain (e.g., time of frequency). In this study, the data (phase current signals) is arranged in time domain series.
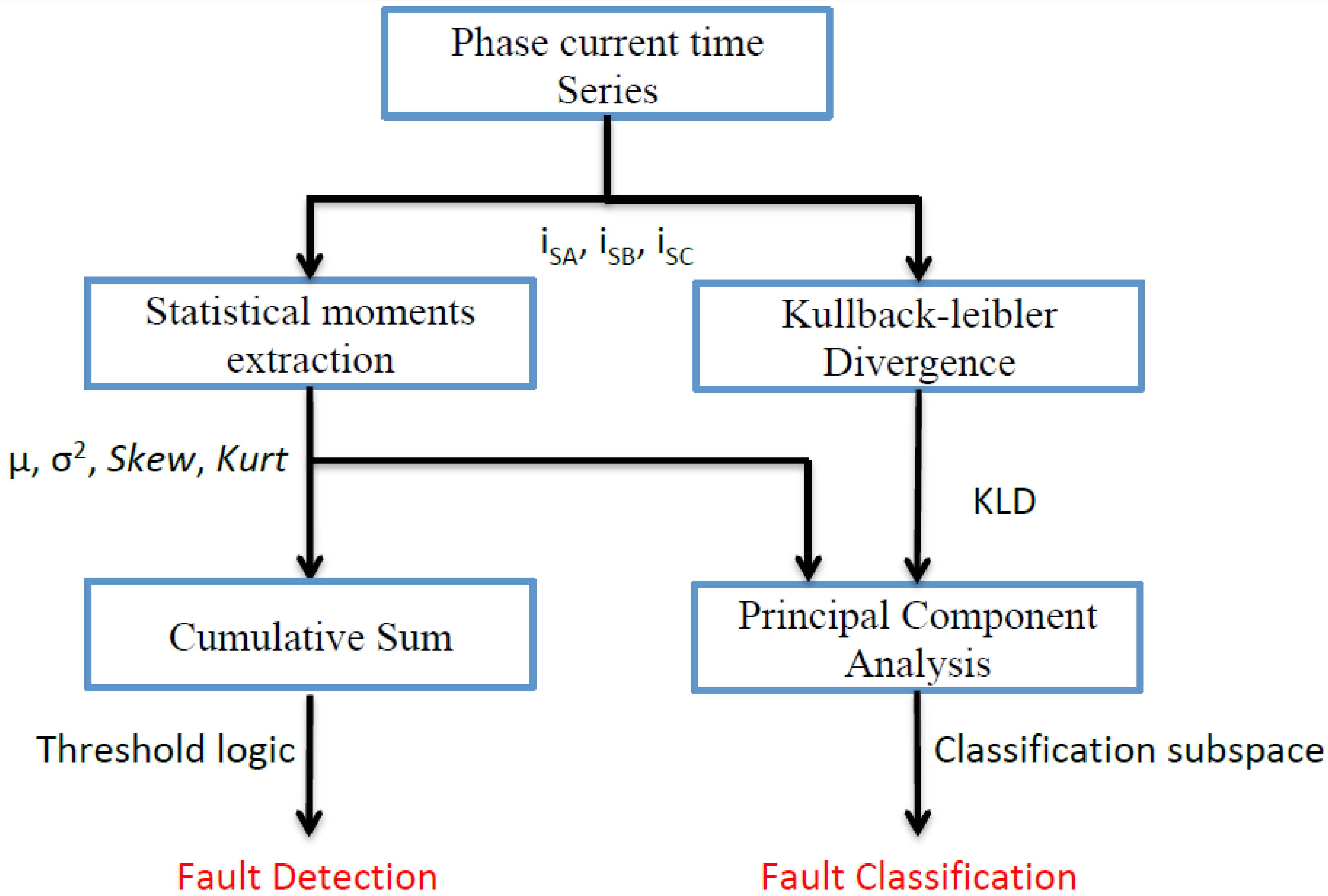
- The third step is the Features extraction. The goal of this step is to extract from the collected and processed data the most sensitive information (fault features) to the fault occurrence. The efficiency of these features will have critical consequences on the fault detection performances. For our proposal, we evaluate the first four statistical moments of the signal and the Kulback-Leibler divergence [18].
- The fourth step is for features analysis. The extracted features are analyzed to perform the fault detection and classification. In this work, we have analyzed the extracted features using statistical elements as the extremes, threshold logic, Cumulative Sum (CUSUM), or the Principal Component Analysis (PCA) [19].
3.2. Fault Detection and Classification
4. Fault Detection
4.1. Features Extraction for Fault Detection
- The mean µ representing the bias,
- The variance corresponding to the measured phase current dispersion within its offset,
- The skewness Skew, which evaluates the dissymmetry of the phase current distribution,
- The kurtosis Kurt that measures the flatness of the phase current distribution.
- Two OSF (100 μs and 500 μs),
- A rotating speed of 60 rad/s,
- 100% of the rated load.
4.2. Features Analysis for Fault Detection
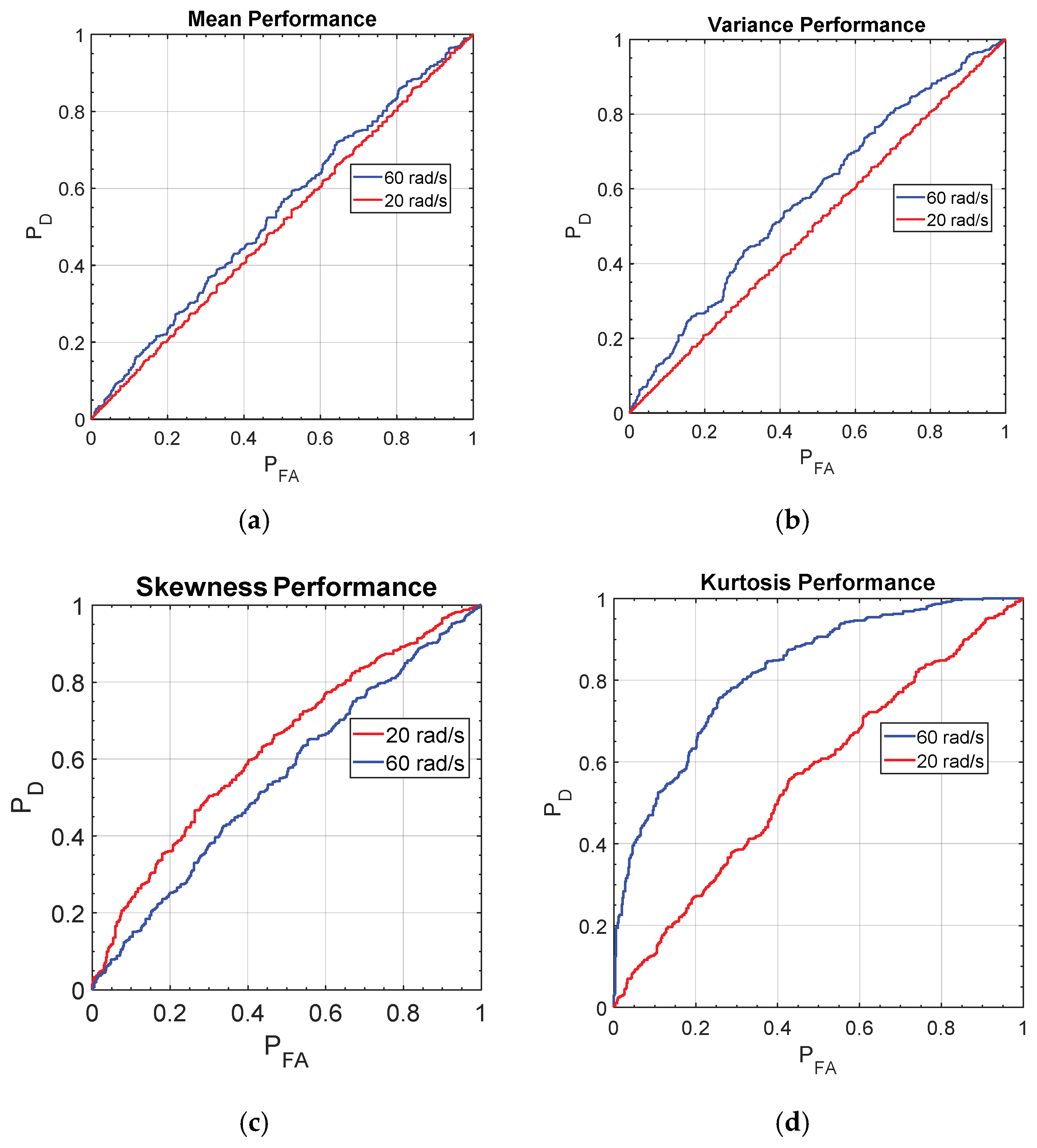
4.2.1. Fault Detection with Statistical Moments
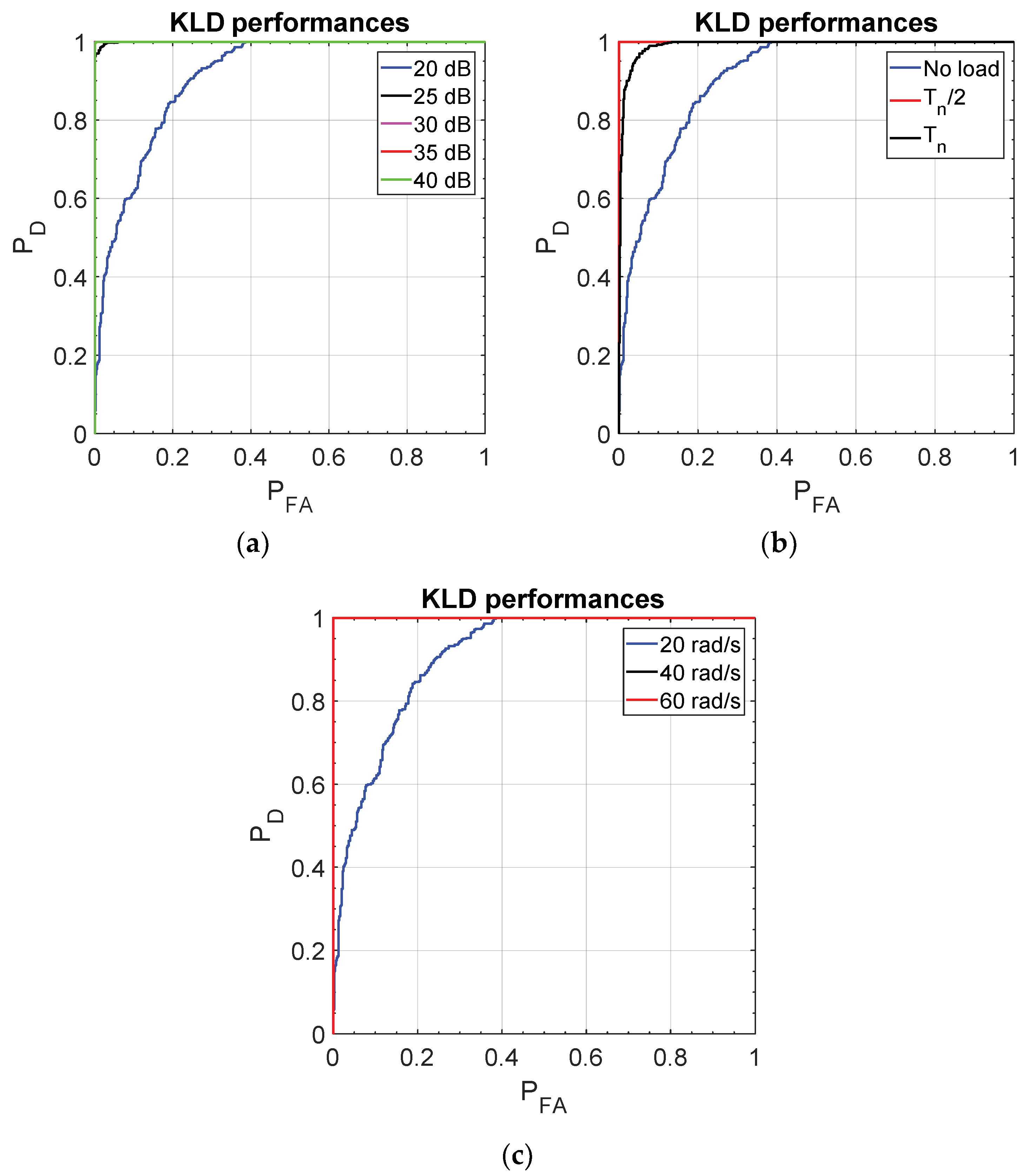
- The probability of detection (PD). It highlights the ability for correctly detecting a fault when it occurs.
- The probability of false alarm (PFA). It measures the probability of considering a healthy situation as a fault.
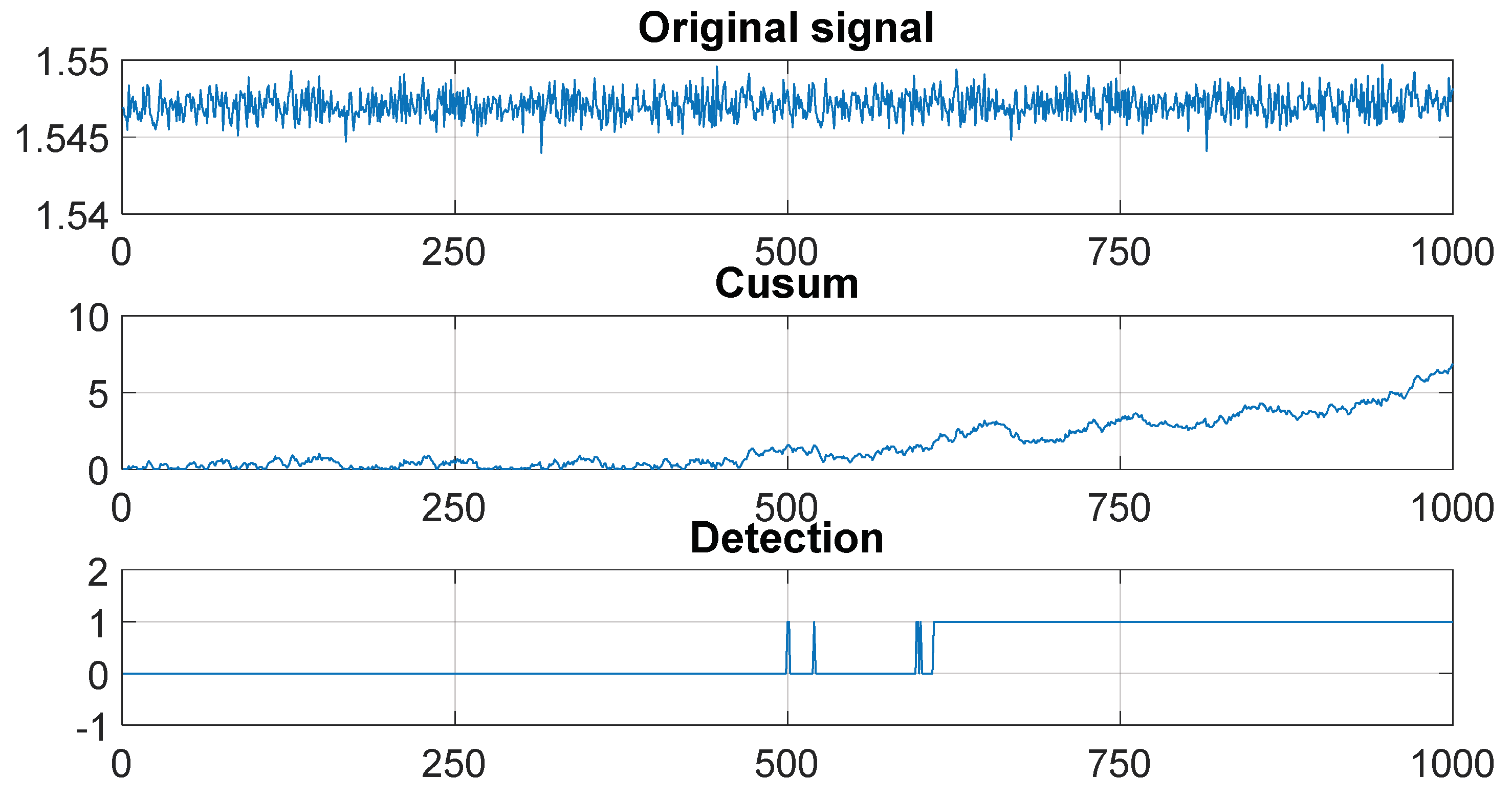
4.2.2. Fault Detection Improvement with CUSUM
5. Fault Classification
5.1. Features Extraction for Fault Classification
- At 60 rad/s, the fault detection with KLD is almost perfect (PD = 1) with no false alarms regardless of the noise level, the fault duration, and the load.
- At 40 rad/s, the performances are slightly degraded for 100 µs fault duration (PD > 0.98 for 50% and 100% of load and PD = 0.82 for no load) but remain excellent.
- At 20 rad/s, the performances are slightly reduced, but they are still acceptable.
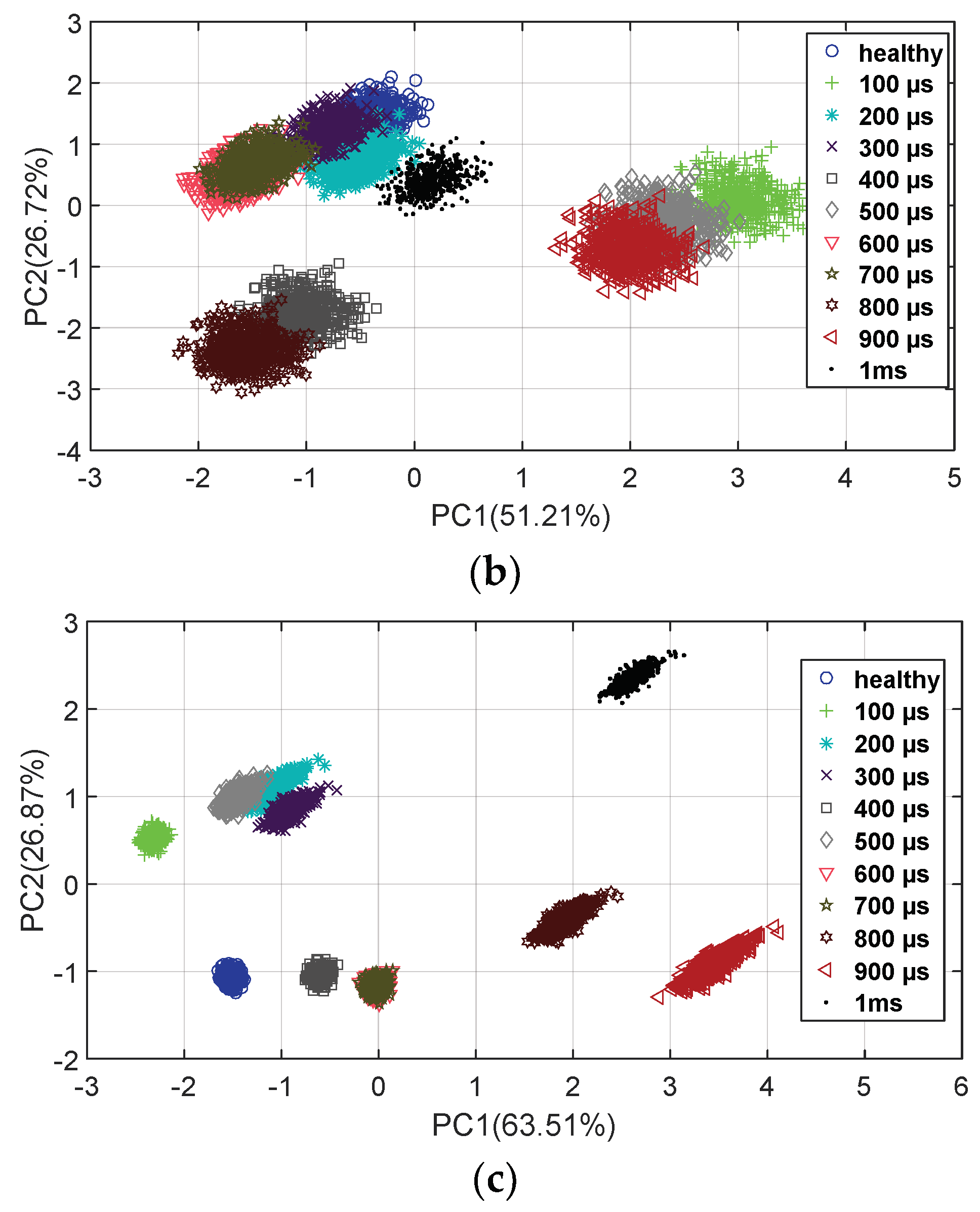
5.2. Feature Analysis for Fault Classification
- m is the number of features or variables. In our case m = 5 with (μ, 2, Skew, Kurt, KLD);
- N is the number of samples for each variable for all operating conditions, including healthy and faulty cases.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Acronyms | |
| NPC | Neutral-Point Clamped |
| IM | Induction Machine |
| SCF | Short Circuit Fault |
| OSF | Open Circuit Fault |
| FDD | Fault Detection and Diagnosis |
| EUDC | European Driving Cycle |
| CUSUM | Cumulative SUM |
| PCA | Principal Component Analysis |
| SNR | Signal to Noise Ratio |
| KLD | Kullack-Leibler Divergence |
| Variables | |
| μ | mean value |
| σ2 | variance |
| Skew | Skewness |
| Kurt | Kurtosis |
| PD | probability of fault detection |
| PFA | probability of false alarm |
| XNxm | data matrix |
| va, vb, vc | phase voltages |
| iSA, iSB, iSC | phase currents |
| I | Kullback-Leibler Information |
References
- Ganev, E. Selecting the Best Electric Machines for Electrical Power-Generation Systems: High-performance solutions for aerospace more electric architectures. IEEE Electron. Mag. 2014, 2, 13–22. [Google Scholar] [CrossRef]
- Chudzikiewicz, A.; Bogacz, R.; Kostrzewski, M.; Konowrocki, R. Condition monitoring of railway track systems by using acceleration signals on wheelset axle-boxes. Transport 2018, 33, 555–566. [Google Scholar] [CrossRef]
- Ferguson, M.; Law, K.H.; Bhinge, R.; Lee, Y.T. A generalized method for featurization of manufacturing signals, with application to tool condition monitoring. In Proceedings of the 37th Computers and Information in Engineering Conference IDETC2017, Cleveland, OH, USA, 6–9 August 2017. [Google Scholar]
- Chybowski, L.; Gawdzińska, K. On the Possibilities of Applying the AHP Method to a Multi-criteria Component Importance Analysis of Complex Technical Objects. Adv. Intell. Syst. Comput. 2016, 445, 701–710. [Google Scholar]
- Benbouzid, M.; Delpha, C.; Khatir, Z.; Lefebvre, S.; Diallo, D. Faults Detection and Diagnosis in a Static Converter. In Electrical Machines Diagnosis; Wiley: New York, NY, USA, 2011; pp. 271–316. [Google Scholar]
- Franquelo, L.; Rodriguez, J.; Leon, J.I.; Kouro, S.; Portillo, L.; Prats, M. The age of Multilevel Converter arrives. IEEE Ind. Electron. Mag. 2008, 2, 28–39. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Malinowski, M.; Al Haddad, K. Multilevel Converter/Inverter Topologies and Applications; Wiley-IEEE Press: New York, NY, USA, 2014. [Google Scholar]
- Sharkh, S.M.; Abusara, M.A.; Orfanoudakis, G.I.; Hussain, B. Power Electronic Converters for Microgrids; IEEE Wiley: New York, NY, USA, 2014; 72p. [Google Scholar]
- Wu, B.; Narimani, M. Diode-Clamped Multilevel Inverters; Wiley-IEEE Press: New York, NY, USA, 2017. [Google Scholar]
- Chowdhury, A. Three-Level Neutral Point Clamped Traction Inverter Drive for Electric Vehicles. Ph.D. Thesis, Concordia University, Montreal, QC, Canada, April 2015. [Google Scholar]
- Errabelli, R.; Mutschler, P. Fault-tolerant voltage source inverter for permanent magnet drives. IEEE Trans. Power Electron. 2012, 27, 500–508. [Google Scholar] [CrossRef]
- Varghese, S.E.; Reema, N. Effects of Switching Faults on Induction Motor Drive System. IRJET 2016, 3, 607–611. [Google Scholar]
- Delpha, C.; Diallo, D.; Al Samrout, H.; Moubayed, N. Multiple incipient fault diagnosis in three-phase electrical systems using multivariate statistical signal processing. Eng. Appl. Artif. Intell. 2018, 73, 68–79. [Google Scholar] [CrossRef]
- Lezana, P.; Pou, J.; Meynard, T.A.; Rodriguez, J.; Ceballos, S.; Richardeau, F. Survey on Fault Operation in Multilevel Inverters. IEEE Trans. Ind. Electron. 2010, 57, 2207–2218. [Google Scholar] [CrossRef]
- Lamb, J.; Mirafzal, B. Open-Circuit IGBT Fault Detection and Location Isolation for Cascaded Multilevel Inverters. IEEE Trans. Ind. Electron. 2017, 64, 4846–4853. [Google Scholar] [CrossRef]
- Rothenhagen, K.; Fuchs, F.W. Performance of diagnosis methods for IGBT open circuit faults in voltage source active rectifiers. In Proceedings of the IEEE PESC, Aachen, Germany, 20–25 June 2004; pp. 4348–4354. [Google Scholar]
- Mendes, A.M.S.; Cardoso, A.J.M.; Saraiva, E.S. Voltage source inverter fault diagnosis in variable speed AC drives, by the average current Park’s vector approach. In Proceedings of the IEEE IEMDC, Seattle, WA, USA, 9–12 May 1999; pp. 704–706. [Google Scholar]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Jolliffe, I. Principal Component Analysis, 2nd ed.; Springer Series in Statistics: London, UK, 2002. [Google Scholar]
- Green, D.M.; Swets, J.M. Signal Detection Theory and Psychophysics; John Wiley and Sons Inc.: New York, NY, USA, 1966. [Google Scholar]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M. Diagnosis and Fault-Tolerant Control, 2nd ed.; Springer: Berlin, Germany, 2006; pp. 238–263. [Google Scholar]
- Basseville, M.; Nikiforov, I. Detection of Abrupt Changes-Theory and Applications; Prentice-Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Delpha, C.; Diallo, D.; Al Samrout, H.; Moubayed, N. Incipient fault detection and diagnosis in a three-phase electrical system using statistical signal processing. In Proceedings of the IEEE Industrial Electronics Conference (IECON 2017), Beijing, China, 29 October–1 November 2017; pp. 3828–3833. [Google Scholar]
- Basseville, M. Distances measures for signal processing and pattern recognition. Signal Process. 1989, 18, 349–369. [Google Scholar] [CrossRef]
- Silva, J.; Narayanan, S. Average divergence distance as a statistical discrimination measure for hidden Markov models. IEEE Trans. Audio Speech Lang. Process. 2006, 14, 890–906. [Google Scholar] [CrossRef]
- Afgani, M.; Sinanovic, S.; Haas, H. Anomaly detection using the Kullback–Leibler divergence metric. In Proceedings of the 1st International Symposium on Applied Science on Biomedical and Computer Technology (ISABEL 2008), Aalborg, Denmark, 25–28 October 2008. [Google Scholar]
- Anderson, A.; Hass, H. Kullback–Leibler divergence (KLD) based anomaly detection and monotonic sequence analysis. In Proceedings of the IEEE Vehicular Technology Conference (VTCFall), Budapest, Hungary, 15–18 May 2011. [Google Scholar]
- Harmouche, J.; Delpha, C.; Diallo, D. Incipient Fault Detection and Diagnosis Based on Kullback-Leibler Divergence Using Principal Component Analysis: Part I. Signal Process. 2014, 94, 278–287. [Google Scholar] [CrossRef]
- Chai, Y.; Tao, S.; Mao, W.; Zhang, K.; Zhu, Z. Online incipient fault diagnosis based on Kullback-Leibler divergence and recursive principle component analysis. Can. J. Chem. Eng. 2018, 96, 426–433. [Google Scholar] [CrossRef]
- Zuo, M.J.; Lin, J.; Fan, X. Feature separation using ICA for a one-dimensional time series and its application in fault detection. J. Sound Vib. 2005, 287, 614–624. [Google Scholar] [CrossRef]
- Harmouche, J.; Delpha, C.; Diallo, D. Incipient Fault Detection and Diagnosis Based on Kullback-Leibler Divergence Using Principal Component Analysis: Part II. Signal Process. 2015, 109, 334–344. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Symbol | Value | Unit |
|---|---|---|---|
| Nominal voltage | Un | 220/380 | V |
| Nominal speed | Nn | 1420 | rpm |
| Nominal power | Pn | 1.5 | kW |
| Rated torque | Tn | 10 | Nm |
| Nominal frequency | f | 50 | Hz |
| Number of poles | p | 2 | |
| Stator resistance | Rs | 4.85 | Ω |
| Rotor resistance | Rr | 3.805 | Ω |
| Stator self-inductance | Ls | 0.274 | H |
| Rotor self-inductance | Lr | 0.274 | H |
| Mutual inductance (stator-rotor) | Lm | 0.258 | H |
| Inertia | J | 0.031 | kgm2 |
| SNR | 20 rad/s | 40 rad/s | 60 rad/s | ||||||
|---|---|---|---|---|---|---|---|---|---|
| No Load | 50% of Tn | 100% of Tn | No Load | 50% of Tn | 100% of Tn | No Load | 50% of Tn | 100% of Tn | |
| 40 dB | 9/10 | 4/10 | 10/10 | 9/10 | 7/10 | 10/10 | 10/10 | 10/10 | 10/10 |
| 35 dB | 7/10 | 0/10 | 10/10 | 9/10 | 9/10 | 10/10 | 10/10 | 10/10 | 10/10 |
| 30 dB | 1/10 | 0/10 | 10/10 | 8/10 | 4/10 | 8/10 | 10/10 | 10/10 | 9/10 |
| 25 dB | 0/10 | 0/10 | 6/10 | 6/10 | 2/10 | 6/10 | 10/10 | 9/10 | 6/10 |
| 20 dB | 0/10 | 0/10 | 3/10 | 2/10 | 0/10 | 2/10 | 9/10 | 8/10 | 6/10 |
| SNR | 20 rad/s | 40 rad/s | 60 rad/s | ||||||
|---|---|---|---|---|---|---|---|---|---|
| No load | 50% of Tn | 100% of Tn | No load | 50% of Tn | 100% of Tn | No load | 50% of Tn | 100% of Tn | |
| 40 dB | 6/10 | 6/10 | 8/10 | 5/10 | 6/10 | 2/10 | 7/10 | 4/10 | 5/10 |
| 35 dB | 5/10 | 7/10 | 8/10 | 6/10 | 9/10 | 4/10 | 8/10 | 6/10 | 5/10 |
| 30 dB | 6/10 | 6/10 | 3/10 | 6/10 | 7/10 | 3/10 | 8/10 | 5/10 | 6/10 |
| 25 dB | 5/10 | 8/10 | 2/10 | 5/10 | 8/10 | 3/10 | 9/10 | 5/10 | 5/10 |
| 20 dB | 9/10 | 7/10 | 9/10 | 7/10 | 3/10 | 5/10 | 9/10 | 10/10 | 4/10 |
| SNR | 20 rad/s | 40 rad/s | 60 rad/s | ||||||
|---|---|---|---|---|---|---|---|---|---|
| No load | 50% of Tn | 100% of Tn | No load | 50% of Tn | 100% of Tn | No load | 50% of Tn | 100% of Tn | |
| 40 dB | 10/10 | 9/10 | 10/10 | 10/10 | 10/10 | 10/10 | 10/10 | 10/10 | 10/10 |
| 35 dB | 9/10 | 10/10 | 8/10 | 10/10 | 10/10 | 10/10 | 10/10 | 10/10 | 10/10 |
| 30 dB | 10/10 | 9/10 | 9/10 | 10/10 | 9/10 | 10/10 | 10/10 | 10/10 | 10/10 |
| 25 dB | 9/10 | 10/10 | 9/10 | 9/10 | 9/10 | 10/10 | 10/10 | 10/10 | 10/10 |
| 20 dB | 7/10 | 8/10 | 6/10 | 8/10 | 8/10 | 10/10 | 9/10 | 10/10 | 8/10 |
| SNR | 20 rad/s | 40 rad/s | 60 rad/s | ||||||
|---|---|---|---|---|---|---|---|---|---|
| No load | 50% of Tn | 100% of Tn | No load | 50% of Tn | 100% of Tn | No load | 50% of Tn | 100% of Tn | |
| 40 dB | 7/10 | 7/10 | 10/10 | 10/10 | 6/10 | 10/10 | 10/10 | 10/10 | 10/10 |
| 35 dB | 8/10 | 3/10 | 8/10 | 10/10 | 10/10 | 10/10 | 10/10 | 10/10 | 10/10 |
| 30 dB | 8/10 | 8/10 | 9/10 | 10/10 | 9/10 | 9/10 | 10/10 | 10/10 | 10/10 |
| 25 dB | 8/10 | 8/10 | 8/10 | 9/10 | 10/10 | 10/10 | 10/10 | 10/10 | 10/10 |
| 20 dB | 8/10 | 5/10 | 7/10 | 10/10 | 6/10 | 10/10 | 9/10 | 10/10 | 9/10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baghli, M.; Delpha, C.; Diallo, D.; Hallouche, A.; Mba, D.; Wang, T. Three-Level NPC Inverter Incipient Fault Detection and Classification using Output Current Statistical Analysis. Energies 2019, 12, 1372. https://doi.org/10.3390/en12071372
Baghli M, Delpha C, Diallo D, Hallouche A, Mba D, Wang T. Three-Level NPC Inverter Incipient Fault Detection and Classification using Output Current Statistical Analysis. Energies. 2019; 12(7):1372. https://doi.org/10.3390/en12071372
Chicago/Turabian StyleBaghli, Mehdi, Claude Delpha, Demba Diallo, Abdelhamid Hallouche, David Mba, and Tianzhen Wang. 2019. "Three-Level NPC Inverter Incipient Fault Detection and Classification using Output Current Statistical Analysis" Energies 12, no. 7: 1372. https://doi.org/10.3390/en12071372
APA StyleBaghli, M., Delpha, C., Diallo, D., Hallouche, A., Mba, D., & Wang, T. (2019). Three-Level NPC Inverter Incipient Fault Detection and Classification using Output Current Statistical Analysis. Energies, 12(7), 1372. https://doi.org/10.3390/en12071372