1. Introduction
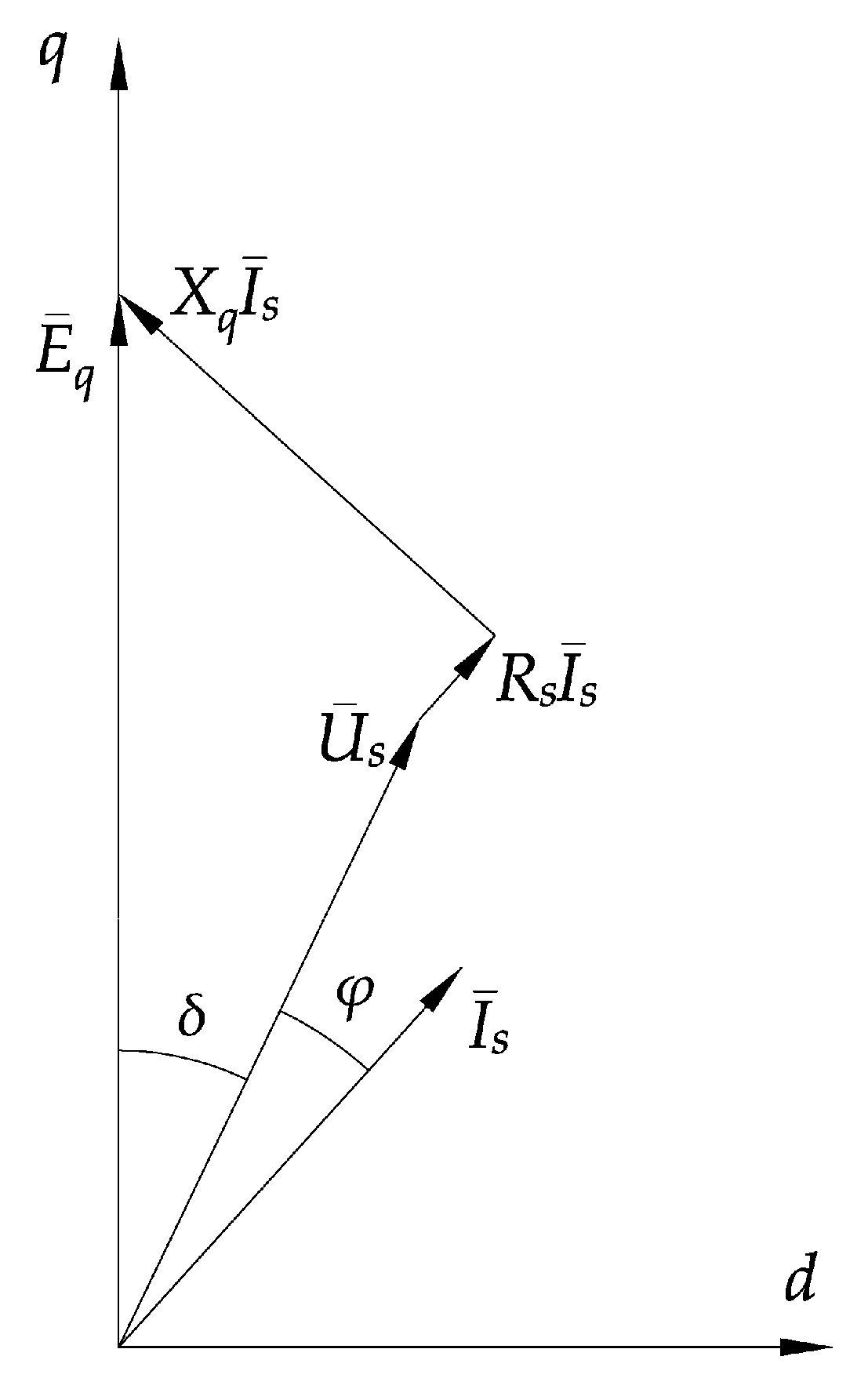
Due to increasing demands and regulatory constraints, modern power systems have been forced to operate close to their stability limits. The wound rotor synchronous generator is a basic production unit of the electrical power system, and its load angle, defined as the electrical angle by which the internal induced voltage in the quadrature (
q) axis
Eq leads the stator terminal voltage
Us, represents a fundamental quantity for power system stability assessment [
1,
2]. It defines the generator operating point with respect to the stability limits. Load angle is essential in transient stability studies, and its utilization in other real-time applications, such as protection functions, or as an input to excitation control systems and power system stabilizers has been investigated [
3,
4]. Therefore, the accurate knowledge of load angle value is required.
The methods of determining the generator’s load angle in power plants mainly consist of physical measurements. Direct load angle measurements are rarely used, while indirect measurements, utilizing rotor position information from the corresponding sensor and the information about the first harmonic of the generator terminal voltage, such as those presented in [
5,
6,
7], are more prevalent. These methods of load angle determination require installation of additional measuring equipment, which represents additional costs, while in some systems it is even not possible to install it due to their configuration.
The alternative approach to load angle determination is estimation based on electrical quantities (voltages and currents), whose measurements are already incorporated in generator protection systems and excitation control systems. This approach might offer an effective and economic way of load angle monitoring. However, existing research attempts on the load angle estimation of the wound rotor synchronous generator have been limited to the estimator based on the generator’s voltage-current phasor diagram and estimators based on artificial neural networks (ANNs).
The load angle estimator based on the generator’s voltage-current phasor diagram was studied in [
8]. The estimator utilized measured values of stator voltages, stator currents, active and reactive power, as well as generator parameters: stator resistance and quadrature axis synchronous reactance. This estimation method was slightly extended in [
7] to take into account network parameters, i.e., the equivalent reactance of a transmission line and a transformer. However, it should be noted that the estimation method based on the phasor diagram is valid for the steady-state generator operation, while during the dynamic transients the estimation performance deteriorates as each phasor has its own dynamics due to the present time constants. The study in [
9] presented a technique for the approximate computation of load angle which was valid for the simplified generator model, and which used generator dynamic parameters and terminal measurements of voltage magnitude, active power, reactive power, and field current.
In [
10] the simulations of the generator speed and load angle estimation based on real-time phasor measurements and two multilayered feedforward artificial neural networks were presented. The ANN for load angle estimation included 40 neurons in the hidden layer, and its inputs were values of terminal voltage and current magnitudes, as well as their phase angles, measured in the current time step and the two previous time steps. The study presented in [
11] proposed an estimation method based on the post-processing of sine and cosine values of the load angle, which were obtained by two ANNs implemented in the simulation environment, both with two hidden layers of eight neurons and 20 input variables. The study conducted in [
12] dealt with the load angle estimation by using dynamic ANN with the following inputs: active power, reactive power, field current, and terminal voltage at the current and the previous time instant. The performance of the ANN based load angle estimation generally depends on the training process and the quality of the obtained training data, which represents a significant drawback of this type of estimation methods, as such amount of measurements that would include all operating states of the synchronous generator is hardly feasible for practical applications.
In recent years, sliding mode observers (SMOs) [
13,
14,
15,
16,
17] and sliding mode control (SMC) [
18,
19,
20,
21,
22,
23] have gained much research interest in the field of state estimation and control of electrical drives, including permanent magnet synchronous machines (PMSMs) and induction machines (IMs). The main reasons for increasing interest in application of SMOs in the field of electrical drives are their attractive features, such as simple implementation, strong robustness, order reduction, and disturbance rejection [
24]. Moreover, SMOs are characterized by insensitivity to the effects of parameters variation under dynamic conditions of electrical drives [
24]. In comparison with other commonly applied observers, such as Kalman filter and Luenberger observer, SMO has a simpler algorithm [
25]. Additionally, application of the Kalman filter requires the tuning of the initial values of covariance matrices, and such a process, which can be time-consuming, is not needed when SMO is applied [
25]. These reasons also motivated the application of SMO in this paper.
The study in [
26] introduced an SMO based on the equivalent electromotive force (EMF) machine model for rotor position estimation of interior-permanent-magnet synchronous motor (IPMSM). An SMO based on back EMF model which utilized the obtained back EMF equivalent signal, thus eliminating a need for low-pass filter and phase compensation, was proposed in [
27] for rotor position and speed estimation in order to achieve sensorless control of PMSM. In [
28] a wide-speed SMO of rotor position was proposed for sensorless flux adaption-direct torque control of a flux-modulated permanent-magnet wheel motor, eliminating low-pass filter and phase compensation, improving system chattering, and enhancing estimation accuracy at low speed. Sensorless control of a salient-pole PMSM was achieved in [
29] by utilizing extended flux-based machine model and an SMO with a dynamic position compensator for improvement of system dynamic performance. The study in [
30] proposed sensorless control of PMSM with rotor position estimation based on tangent function-based phase-locked loop (PLL) structure and improved SMO with adaptive feedback gain related to the rotor speed. An SMO based on adaptive super-twisting algorithm was proposed in [
31] for rotor position estimation of surface-mounted permanent magnet synchronous machine (SPMSM) and applied for sensorless control with compensation of voltage source inverter nonlinearity. The research conducted in [
32] proposed sensorless control of IPMSM based on an SMO which utilized PLL technique and fuzzy control adjustment of sliding mode gain in order to reduce chattering and increase the observer robustness.
A detailed literature survey has shown that there are many research papers focused on the application of SMOs for the estimation of rotor position of PMSMs. However, to the best of our knowledge, there are no studies on application of SMO for estimation of load angle of grid-connected salient-pole wound rotor synchronous generator. This type of synchronous generator is dominantly used in hydro-electric power plants and, unlike PMSM, is characterized by the ability to control its field excitation, which is achieved by field current regulation.
In [
33] a nonlinear SMO for the estimation of power generator damper currents was developed and applied in sliding mode control in order to achieve transient stabilization and voltage regulation. The study in [
34] presented the observer-based nonlinear controller for the excitation control of synchronous generator, where SMO was used for the estimation of system states and perturbation. State estimation did not include estimation of load angle as it was treated as system output already available by measurements. In [
35] a sliding mode controller of synchronous generator was developed using a nonlinear SMO for estimation of rotor fluxes and mechanical torque. Thus, in SMOs described in studies in [
33,
34,
35] load angle was not estimated, but it was treated as observer output, i.e., its measurements were available and used for estimation of other generator state variables.
Therefore, in this paper, we propose a load angle estimator for a salient-pole wound rotor synchronous generator based on the SMO principle. Unlike the studies described above, the proposed estimator utilizes information about the phase angle of the generator terminal voltage and a concept of a simple SMO based on the equivalent EMF machine model. The estimator uses measurements of terminal voltages and currents, as well as field current measurements. Additionally, values of stator resistance and quadrature axis synchronous inductance are used as estimator parameters. This study shows that a simple SMO based on the equivalent EMF machine model may be effectively applied to the load angle estimation problem of a salient-pole wound rotor synchronous generator. Moreover, traditional SMO structure is improved in this paper with several methods. Firstly, hyperbolic tangent sigmoid (tansig) functions are used instead of the classical sign functions in order to reduce system chattering problems. Furthermore, the second order low-pass filters (LPFs) realized as cascades of two first order LPFs and accompanied with the appropriate phase delay compensation, are implemented to extract EMF values. Finally, a novel approach to observer gain calculation is presented, where an adaptive observer gain proportional to the measured field current value is introduced, in contrast to the commonly applied approach where this gain is set to constant value. Numerical simulations are done on the model of the high power salient-pole wound rotor synchronous generator connected to an infinite network through a transformer and two parallel transmission lines. Results of several case studies show that proposed estimator offers a satisfactory estimation accuracy during active and reactive power disturbances, both in the steady and the transient state, outperforming a classical estimator based on the phasor diagram.
The rest of this paper is organized as follows: in the second section, the principle of the conventionally applied estimator based on the machine phasor diagram is presented, and the SMO based load angle estimator is proposed and explained. Moreover, the structure of the simulated system is explained. The third section presents simulation results obtained for several case studies, accompanied with the evaluation of the proposed estimator’s performance during active and reactive power disturbances. Finally, the fourth section presents our conclusions.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}