Multi-Functional Model Predictive Control with Mutual Influence Elimination for Three-Phase AC/DC Converters in Energy Conversion




Abstract
:1. Introduction
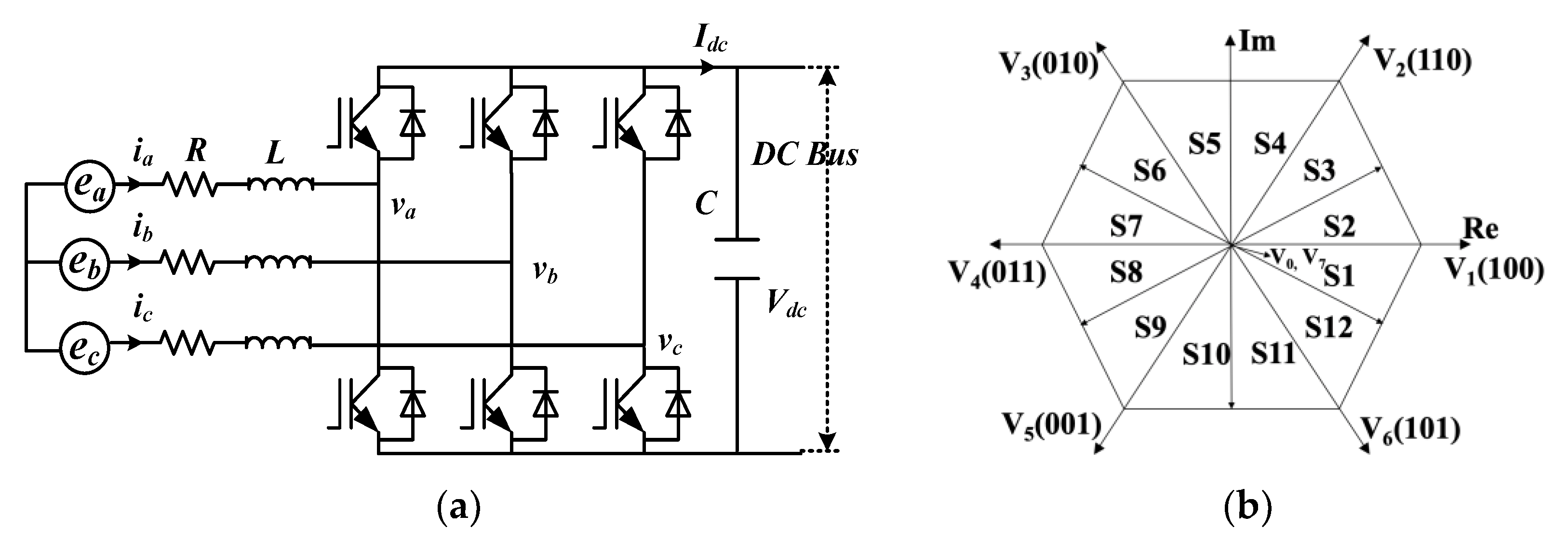
2. Modeling of Three-phase Full-bridge Converter
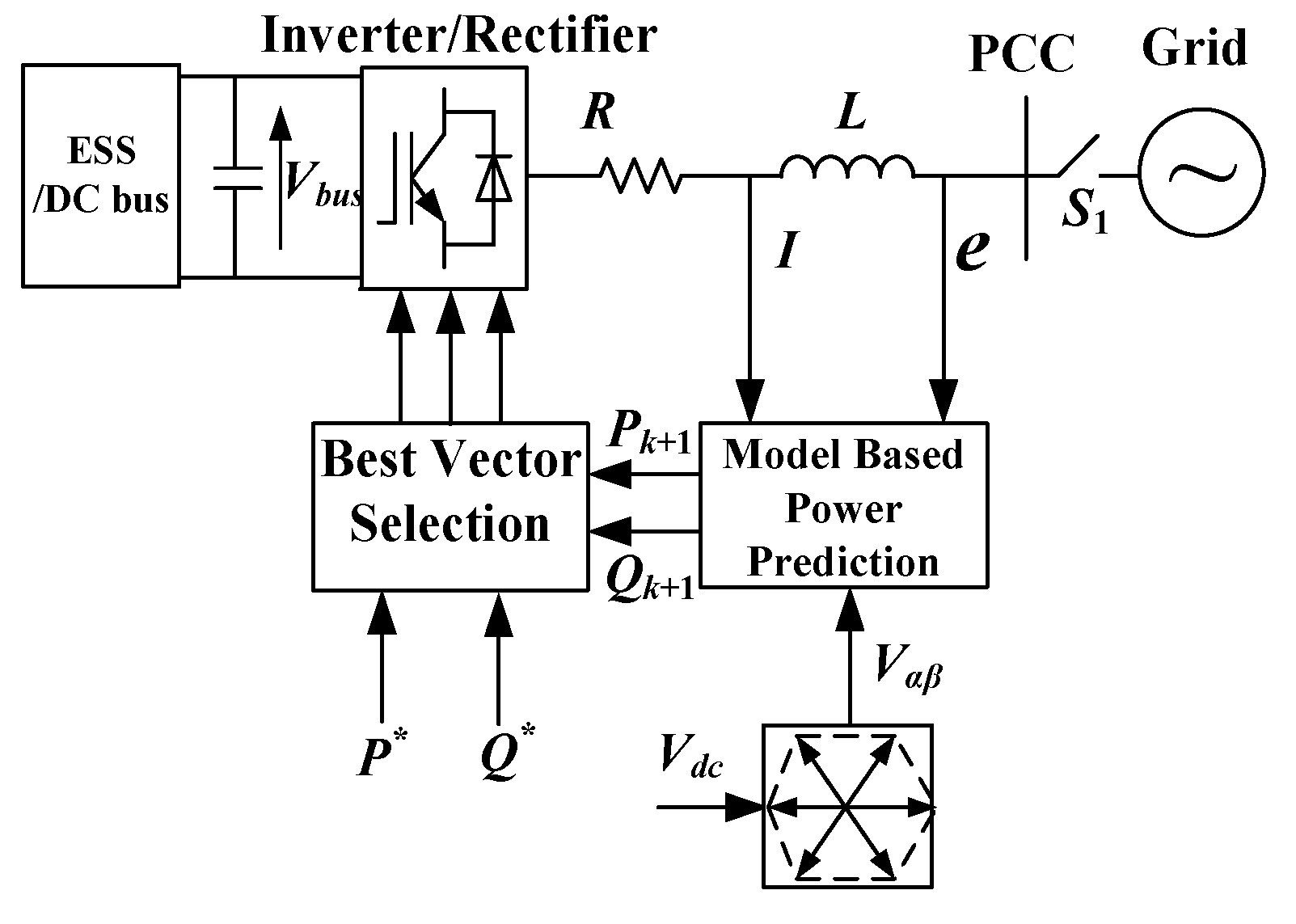
3. Predictive Model of AC/DC Converter
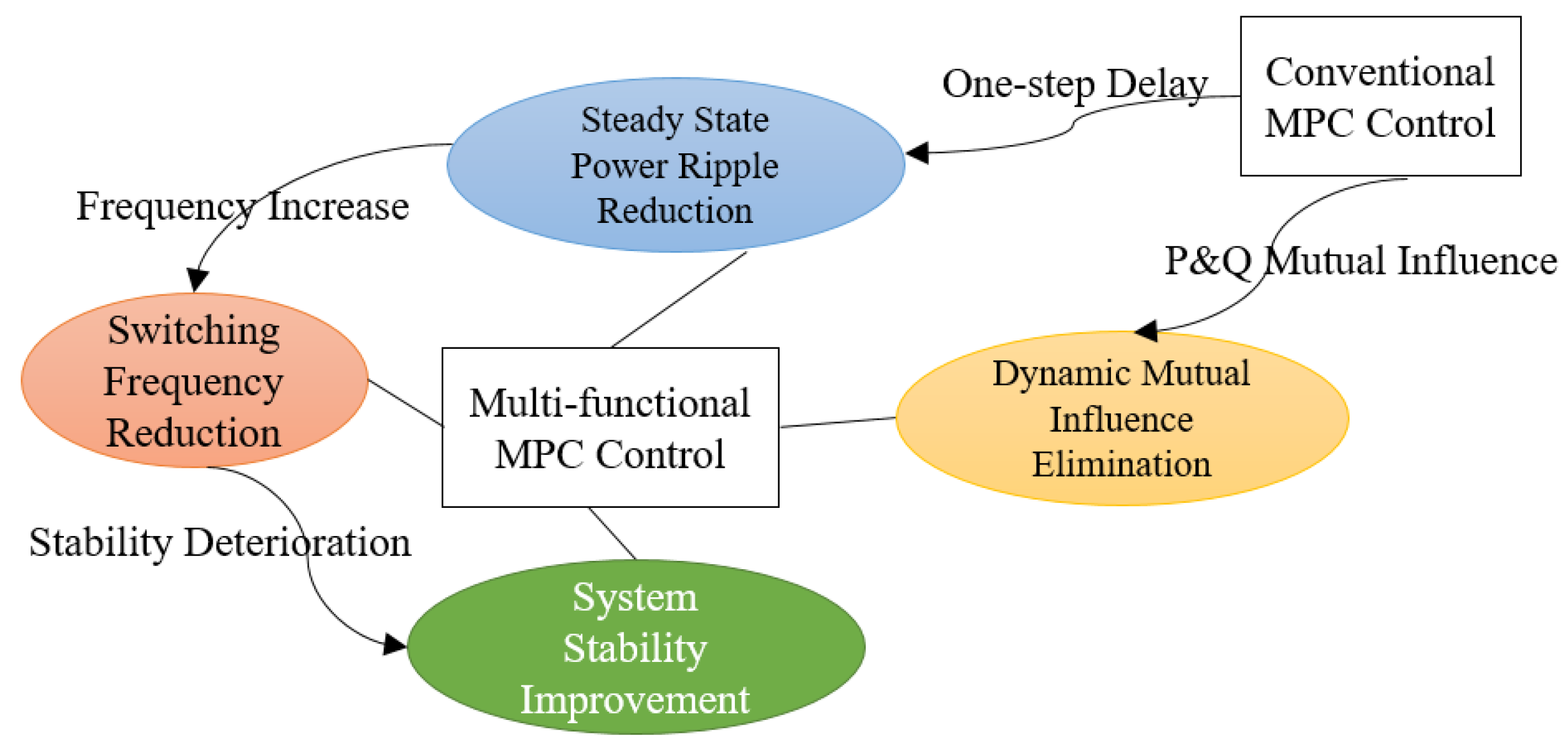
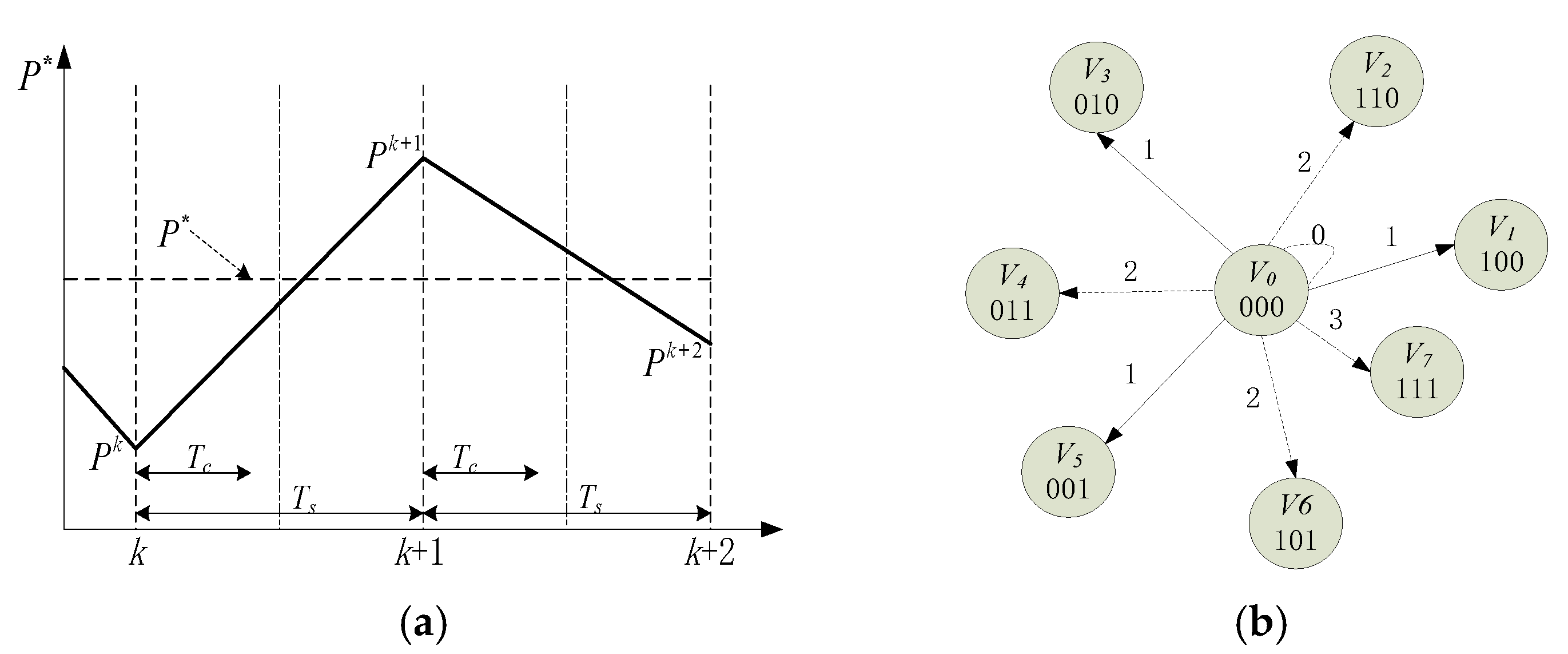
4. Proposed Multi-Functional MPC for Steady and Dynamic Performance Optimization
4.1. Steady-state Performance Improvement
4.1.1. One-Step-Delay Compensation
4.1.2. Frequency Reduction and Stability Improvement
4.2. Dynamic Performance Improvement with Mutual Influence Elimination Constraint
5. Simulation Results
5.1. Steady-State Performance Comparison
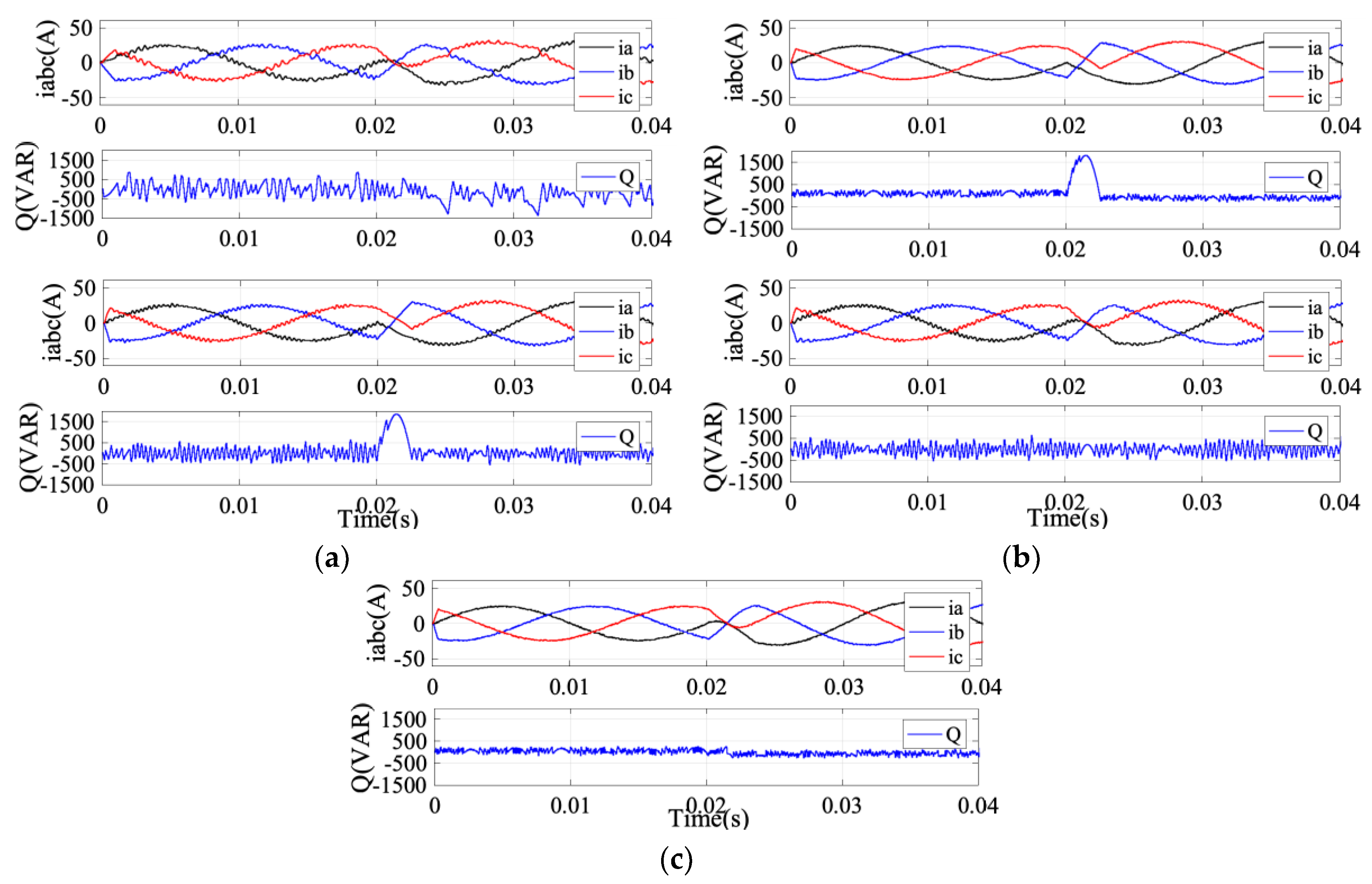
5.2. Dynamic Performance Comparison
6. Experimental Results
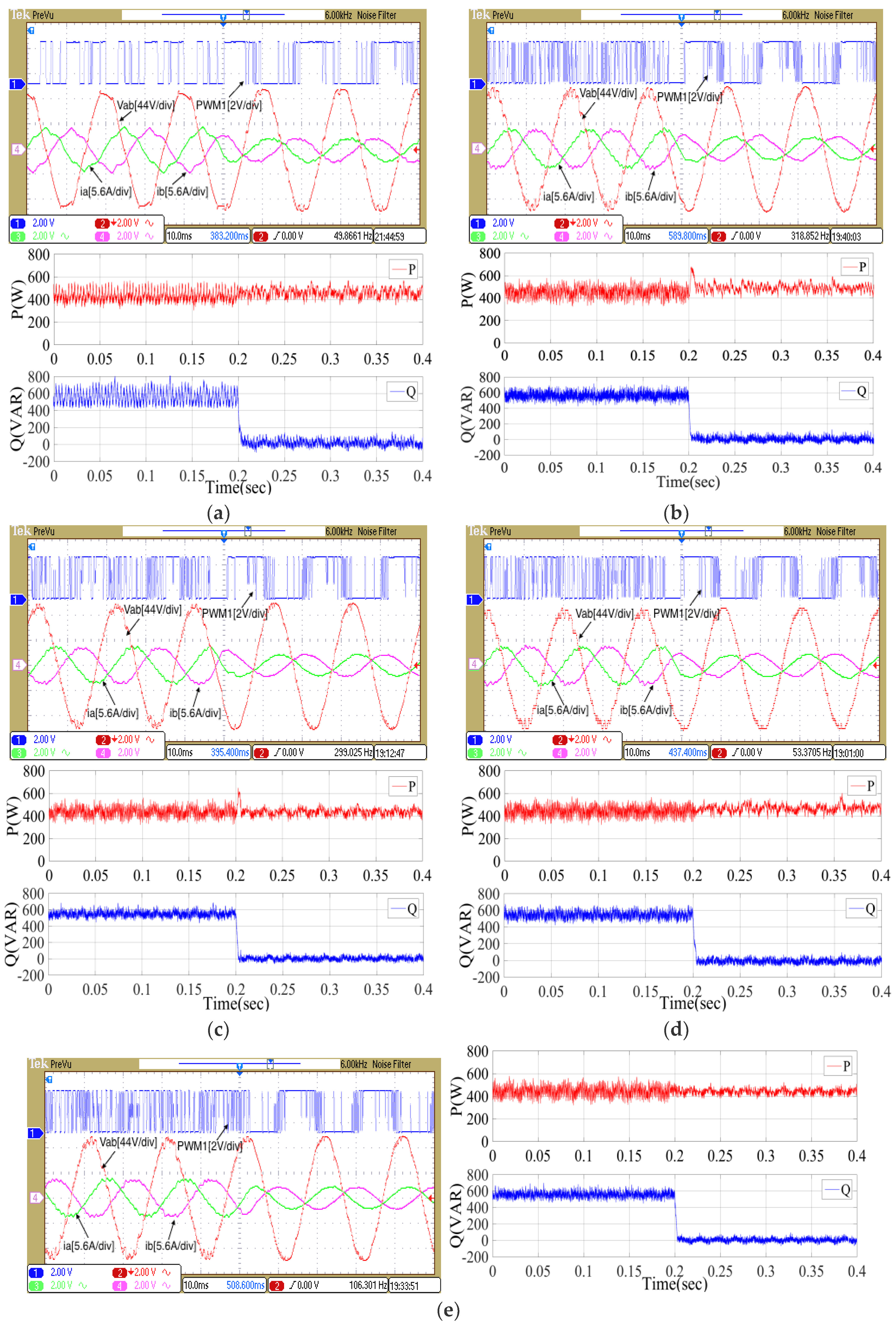
6.1. Comparison of Steady and Dynamic Performance under the Step Change of Reactive Power
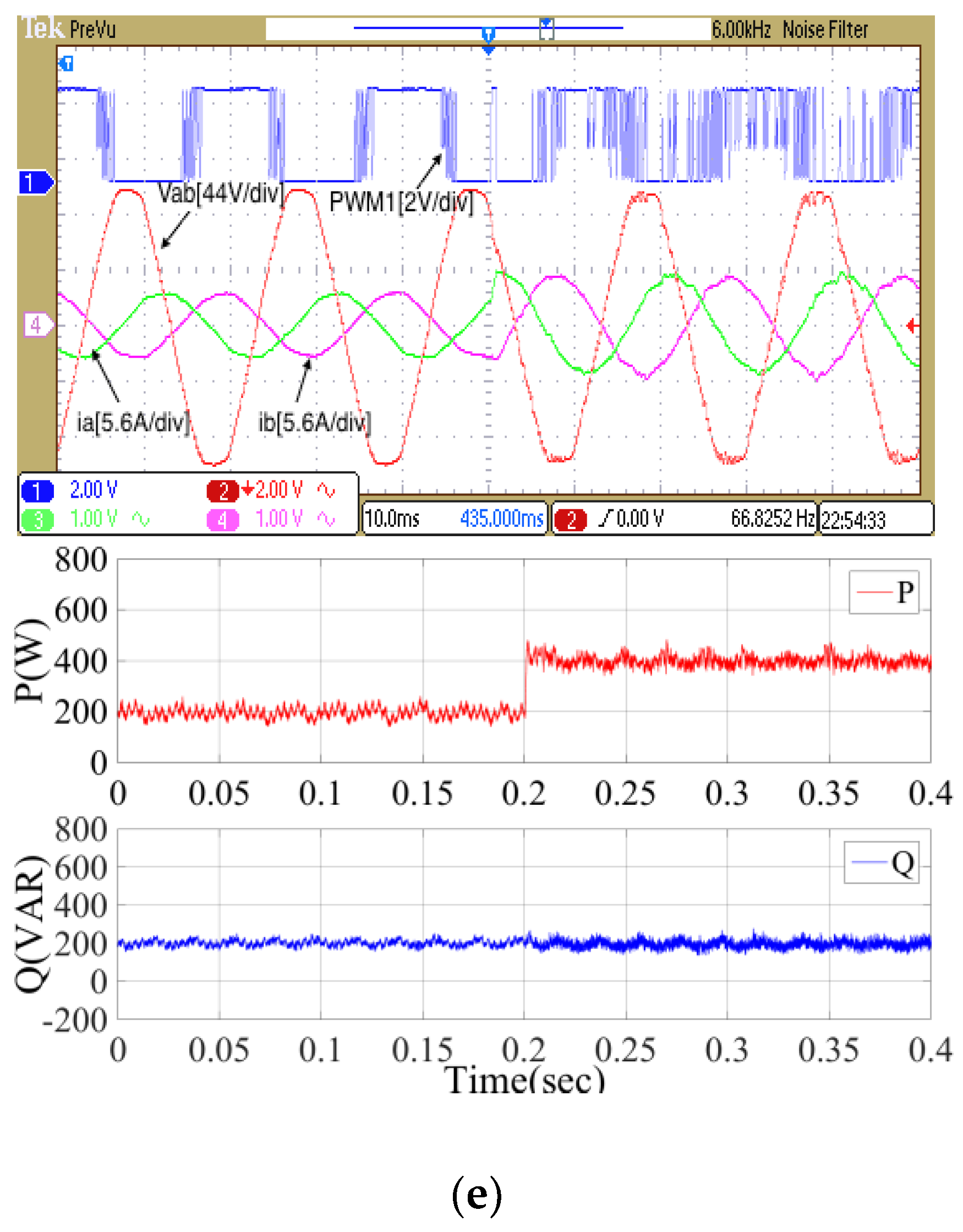
6.2. Dynamic-State Performance with P Step Change
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Carrasco, J.M.; Franquelo, L.G.; Bialasiewicz, J.T.; Galvan, E.; Guisado, R.C.P.; Prats, A.M.; Leon, J.I.; Moreno-Alfonso, N. Power-electronic systems for the grid integration of renewable energy sources: A survey. IEEE Trans. Ind. Electron. 2006, 53, 1002–1016. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Liserre, M.; Ma, K. Power electronics converters for wind turbine systems. IEEE Trans. Ind. Appl. 2012, 48, 708–719. [Google Scholar] [CrossRef]
- Rodriguez, J.R.; Dixon, J.W.; Espinoza, J.R.; Pontt, J.; Lezana, P. PWM regenerative rectifiers: State of the art. IEEE Trans. Ind. Electron. 2005, 52, 5–22. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Chakraborty, S.; Kramer, B.; Kroposki, B. A review of power electronics interfaces for distributed energy systems toward achieving low-cost modular design. Renew. Sustain. Energy Rev. 2009, 13, 2323–2335. [Google Scholar] [CrossRef]
- Strasser, T.; Andrén, F.; Kathan, J.; Cecati, C.; Buccella, C.; Siano, P.; Leitão, P.; Zhabelova, G.; Vyatkin, V.; Vrba, P.; et al. A Review of Architectures and Concepts for Intelligence in Future Electric Energy Systems. IEEE Trans. Ind. Electr. 2015, 62, 2424–2438. [Google Scholar] [CrossRef] [Green Version]
- Alonso-Martinez, J.; Carrasco, J.E.; Arnaltes, S. Table-based direct power control: A critical review for microgrid applications. IEEE Trans. Power Electron. 2010, 25, 2949–2961. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Z.; Zhang, Y.; Xie, W.; Piao, Z.; Hu, C. Performance improvement of direct power control of PWM rectifier with simple calculation. IEEE Trans. Power Electron. 2013, 28, 3428–3437. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, J.; Dorrell, D.G. A Comparative Study of Direct Power Control of AC/DC Converters for Renewable Energy Generation. Proc. IEEE IECON Conf. 2011, 3453–3458. [Google Scholar] [CrossRef]
- Noguchi, T.; Tomiki, T.; Kondo, S.; Takahashi, I. Direct power control of PWM converter without power-source voltage sensors. IEEE Trans. Ind. Appl. 1998, 34, 473–479. [Google Scholar] [CrossRef]
- Xu, L.; Zhi, D.; Yao, L. Direct power control of grid connected voltage source converters. Proc. IEEE Power Eng. Soc. Gen. Meet. 2007, 1–6. [Google Scholar] [CrossRef]
- Malinowski, M.; Kazmierkowski, M.P.; Trzynadlowski, A.M. A comparative study of control techniques for PWM rectifiers in AC adjustable speed drives. IEEE Trans. Power Electron. 2003, 18, 1390–1396. [Google Scholar] [CrossRef]
- Antoniewicz, P.; Kazmierkowski, M. Virtual-flux-based predictive direct power control of ac/dc converters with online inductance estimation. IEEE Trans. Ind. Electron. 2008, 55, 4381–4390. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, J.; Dorrell, D.G. In-depth study of direct power control strategies for power converters. IET Power Electronics. 2014, 7, 1810–1820. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model predictive control for power converters and drives: Advances and trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef]
- Kouro, S.; Cores, P.; Vargas, R.; Ammann, U.; Rodrıguez, J. Model predictive control—A simple and powerful method to control power converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, W.; Li, Z.; Zhang, Y. Model predictive direct power control of a PWM rectifier with duty cycle optimization. IEEE Trans. Power Electron. 2013, 28, 5343–5351. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, W. Low complexity model predictive control—Single vector based approach. IEEE Trans. Power Electron. 2014, 29, 5532–5541. [Google Scholar] [CrossRef]
- Song, Z.; Xia, C.; Liu, T. Predictive current control of three-phase grid- connected converters with constant switching frequency for wind energy systems. IEEE Trans. Ind. Electron. 2013, 60, 2451–2464. [Google Scholar] [CrossRef]
- Aguilera, R.P.; Lezana, P.; Quevedo, D.E. Finite-control-set model predictive control with improved steady-state performance. IEEE Trans. Ind. Electron. 2013, 9, 658–667. [Google Scholar] [CrossRef]
- Preindl, M.; Schaltz, E.; Thøgersen, P. Switching frequency reduction using model predictive direct current control for high-power voltage source inverters. IEEE Trans. Ind. Electron. 2011, 58, 2826–2835. [Google Scholar] [CrossRef]
- Cortes, P.; Ortiz, G.; Yuz, J.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Model predictive control of an inverter with output LC filter for UPS applications. IEEE Trans. Ind. Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Vazquez, S.; Montero, C.; Bordons, C.; Franquelo, L.G. Model predictive control of a VSI with long prediction horizon. Proc. IEEE Int. Symp. Ind. Electron. 2011, 1805–1810. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, Z. Improved voltage-vector sequences on dead-beat predictive direct power control of reversible three-phase grid-connected voltage-sourced converters. IEEE Trans. Power Electron. 2013, 28, 254–267. [Google Scholar] [CrossRef]
- Song, Z.; Chen, W.; Xia, C. Predictive direct power control for three-phase grid-connected converters without sector information and voltage vector selection. IEEE Trans. Power Electron. 2014, 29, 5518–5531. [Google Scholar] [CrossRef]
- Ramirez, R.O.; Espinoza, J.R.; Villarroel, F.; Maurelia, E.; Reyes, M.E. A novel hybrid finite control set model predictive control scheme with reduced switching. IEEE Trans. Ind. Electron. 2014, 61, 5912–5920. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Informat. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Maedera, U.; Borrelli, F.; Morari, M. Linear offset-free model predictive control. Automatica 2009, 45, 2214–2222. [Google Scholar] [CrossRef]
- Larrinaga, S.A.; Rodriguez, M.A.; Oyarbide, E.; Apraiz, J.R.T. Predictive control strategy for DC/AC converters based on direct power control. IEEE Trans. Ind. Electron. 2007, 54, 1261–1271. [Google Scholar] [CrossRef]
- Cortes, P.; Kazmierkowski, M.; Kennel, R.; Quevedo, D.; Rodriguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Kwak, S.; Park, J.-C. Switching strategy based on model predictive control of VSI to obtain high efficiency and balanced loss distribution. IEEE Trans. Power Electron. 2014, 29, 4551–4567. [Google Scholar] [CrossRef]
- Vazquez, S. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Vazquez, S.; Sanchez, J.A.; Carrasco, J.M.; Leon, J.I.; Galvan, E. A model-based direct power control for three-phase power converters. IEEE Trans. Ind. Electron. 2008, 55, 1647–1657. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Guzinski, J.; Krzeminski, Z.; Toliyat, H.A. Predictive current control of voltage source inverters. IEEE Trans. Ind. Electron. 2004, 51, 585–593. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, J.; Platt, G.; Dorrell, D.G. Multi-objective model-predictive control for high power converters. IEEE Trans. Energy Convers. 2013, 28, 652–663. [Google Scholar] [CrossRef]
- Quevedo, D.E.; Aguilera, R.P.; Perez, M.A.; Cortes, P.; Lizana, R. Model predictive control of an AFE rectifier with dynamic references. IEEE Trans. Power Electron. 2012, 27, 3128–3136. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Antoniewicz, P.; Kazmierkowski, M. Direct power control of an AFE using predictive control. IEEE Trans. Power Electron. 2008, 23, 2516–2523. [Google Scholar] [CrossRef]
- Choi, D.; Lee, K. Dynamic performance improvement of AC/DC converter using model predictive direct power control with finite control set. IEEE Trans. Ind. Electron. 2015, 62, 757–767. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Name | Value |
|---|---|---|
| Resistance of reactor | R | 510 mΩ |
| Inductance of reactor | L | 4.2 mH |
| DC-bus capacitor | C | 3500 μF |
| Load resistance | RL | 50 Ω |
| Source voltage | e | 110 V(peak) |
| Source voltage frequency | f | 50 Hz |
| DC-bus voltage | Vdc | 300 V |
| Weighting factor | λm | 0.02 |
| Weighting factor | λf | 100 |
| Weighting factor | λs | 55 |
| Control | THD (%) | Prip (W) | Qrip (Var) | fsw (Hz) | Psht (W) | Qsht (Var) | Time (ms) |
|---|---|---|---|---|---|---|---|
| CDPC [8] | 7.95↑ | 209.6↑ | 323.1↑ | 1472↓ | 600↓ | 580↓ | 3.6↑ |
| CMPC-I [35] | 5.92 * | 143.2 * | 244.3 * | 1908 * | 2020 * | 1855 * | 2.5 * |
| CMPC-II [35] | 2.69↓ | 77.7↓ | 81.3↓ | 3201↑ | 1561↓ | 1812↓ | 2.7↑ |
| MMPC-I | 5.33→ | 152.3→ | 224.3→ | 1952→ | 541↓ | 185↓ | 3.3↑ |
| MMPC-II | 2.76↓ | 81.8↓ | 83.1↓ | 3291↑ | 310↓ | 170↓ | 3.2↑ |
| Description | Name | Value |
|---|---|---|
| Resistance of reactor | R | 500 mΩ |
| Inductance of reactor | L | 22 mH |
| DC-bus capacitor | C | 680 μF |
| Load resistance | RL | 34 Ω |
| Source voltage | e | 110 V(peak) |
| Sampling Period | Ts | 50 μs |
| Source voltage frequency | f | 50 Hz |
| Control | THD (%) | Prip (W) | Qrip (Var) | fsw (Hz) | Psht (W) | Qsht (Var) | Time (ms) |
|---|---|---|---|---|---|---|---|
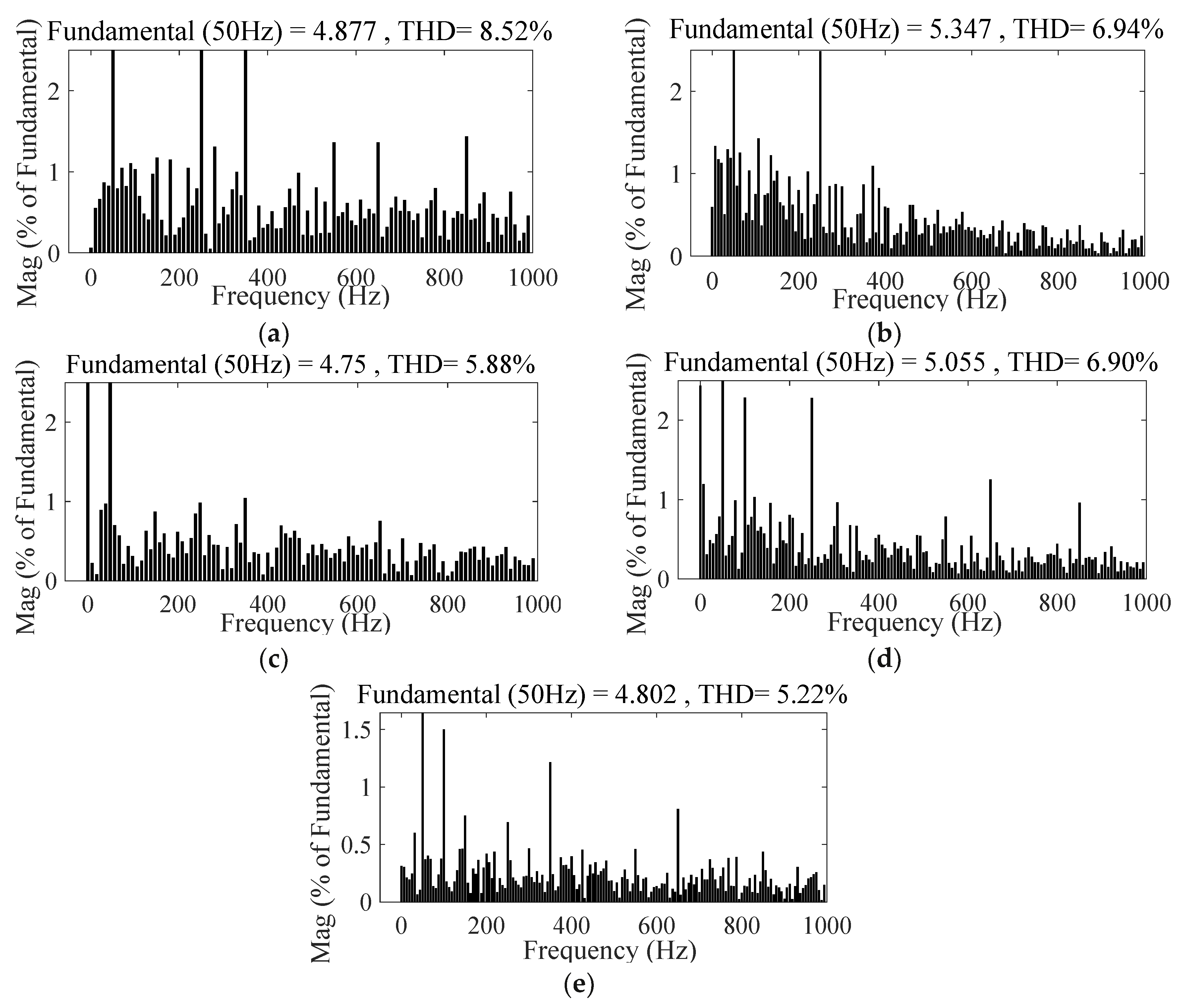
| CDPC [8] | 8.52↑ | 38.56↑ | 38.7↑ | 1720↓ | 68↓ | 133↓ | 4.1↑ |
| CMPC-I [35] | 6.94 * | 30.59 * | 31.57 * | 2520 * | 231 * | 163 * | 2.7* |
| CMPC-II [35] | 5.88↓ | 28.67↓ | 22.87↓ | 3410↑ | 201↓ | 141↓ | 3.2↑ |
| MMPC-I | 6.90→ | 32.82→ | 27.43→ | 2650→ | 71↓ | 45↓ | 3.9↑ |
| MMPC-II | 5.22↓ | 22.12↓ | 22.49↓ | 3760↑ | 49↓ | 49↓ | 3.8↑ |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Zhu, J.; Lu, D.; Li, L. Multi-Functional Model Predictive Control with Mutual Influence Elimination for Three-Phase AC/DC Converters in Energy Conversion. Energies 2019, 12, 1616. https://doi.org/10.3390/en12091616
Shi X, Zhu J, Lu D, Li L. Multi-Functional Model Predictive Control with Mutual Influence Elimination for Three-Phase AC/DC Converters in Energy Conversion. Energies. 2019; 12(9):1616. https://doi.org/10.3390/en12091616
Chicago/Turabian StyleShi, Xiaolong, Jianguo Zhu, Dylan Lu, and Li Li. 2019. "Multi-Functional Model Predictive Control with Mutual Influence Elimination for Three-Phase AC/DC Converters in Energy Conversion" Energies 12, no. 9: 1616. https://doi.org/10.3390/en12091616