Porous Cores in Small Thermoacoustic Devices for Building Applications


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Theoretical Background
2.1.1. Standing Wave TAHE
- A resonator tube with diameter Dr and length Lr.
- A porous core (stack) of length Ls located at a distance La from the rigid wall of the resonator.
- A hot heat exchanger (HX) which heats up the first end of the stack, and a cold heat exchanger (CX) which cools down the second end of the stack.
- Possibly, a utilizer. For instance, a thermoacoustic heat pump (i.e., reversed prime mover) for air cooling applications or a linear generator, a reversed loudspeaker, an impulse turbine or a piezoelectric device for electric energy conversion.
2.1.2. Momentum and Thermal Diffusion
2.1.3. Equivalent Cores
2.1.4. Governing Equations
2.2. Thermoacoustic Performance
2.2.1. Power and Efficiency
- The actual dissipated and acoustic powers are not accounted for: the terms involved in M are proportional to these powers but the terms and in Equations (14) affect the powers in a substantial way.
- The total power and the effects of both entropy flux and heat conduction through the core (see Equation (15)) are not accounted for.
- The power dissipation due to the thermal relaxation, included in Equation (13) is not accounted for.
- No information is provided regarding the optimal size of the resonator where the core is used.
2.2.2. Simulations and Optimal Configuration Assessment
3. Results
3.1. Numerical Results
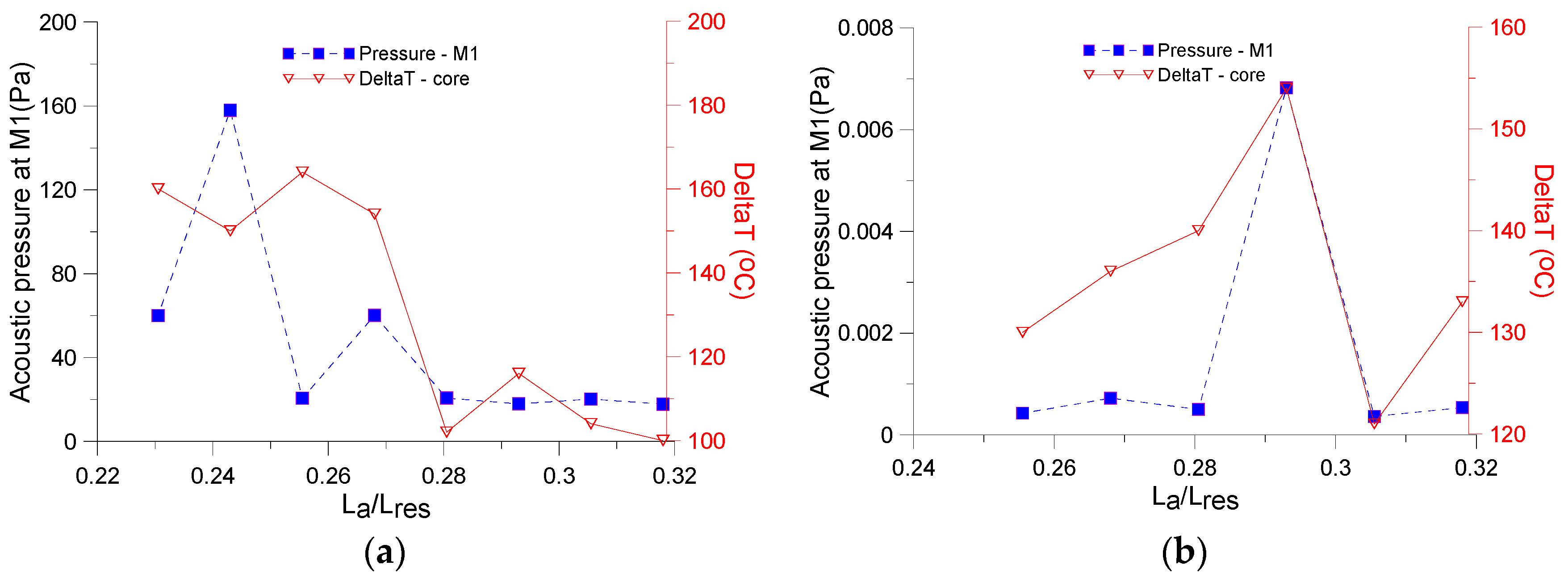
3.2. Experimental Results
4. Discussion
5. Conclusions
- The geometrical characteristics of different cores (diameter of the inner tubes, width of the slits, pin diameter and porosities of the cores) have been chosen to result in “equivalent” thermo-viscous behavior.
- The behavior of each core has been modelled by means of one dimensional thermoacoustic simulations which have been included in a numerical optimization procedure.
- The optimization procedure has been able to find, per each core analyzed, the engine configuration (length of the resonator, operating frequency and position of the core) which maximizes the acoustic power converted from a fixed small input thermal power. The input power used in the simulations is limited to the range 50–150 W.
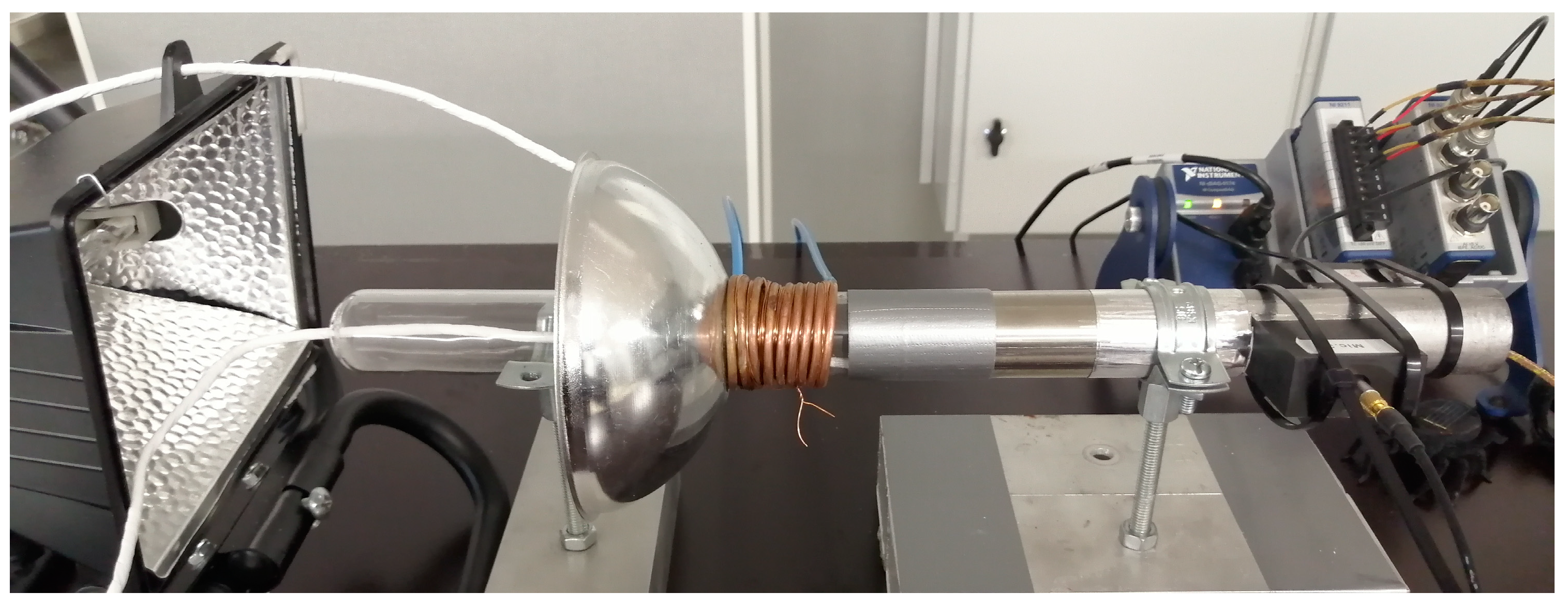
- An experimental setup has been used to emulate a small-scale solar-driven standing wave prime mover. The setup is equipped with a relatively short resonator (40 cm length) and the input thermal power is delivered by the focussed light of a small projector. An additive manufactured core with parallel pins has been tested at different positions in the resonator and compared with an equivalent core provided with rectangular slits.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Symbol | Description |
| a | Semi width of the slit |
| A | Cross section area of the pore |
| Afluid | Fluid area of the core cross section |
| Asolid | Solid area of the core cross section |
| Awet | Wet area of the core |
| Ak | Thermal diffusion area within the pore |
| Av | Viscous diffusion area within the pore |
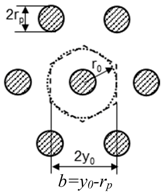
| b | = y0 − rp |
| c | Speed of sound |
| cp | Isobaric heat capacity per unit mass of the fluid |
| cs | Isobaric heat capacity per unit mass of the solid frame |
| CX | Cold heat exchanger |
| d | Semi-distance between two adiacent tubes |
| Dr | Diameter of the resonator and of the core |
| Time averaged acoustic power per unit are of the fluid | |
| fk | Spatially averaged temperature function within the pore |
| fk,s | Spatially averaged temperature function of the solid part of the pore |
| fv | Spatially averaged viscosity function within the pore |
| g | Gain/attenuation constant |
| h | Semi thickness of the plate |
| Total thermal input power | |
| HX | Hot heat exchanger |
| HR | Hydraulic radius |
| HVAC | Heat, ventilation and air conditioning |
| Imaginary part | |
| k | Thermal conductivity |
| La | Distance between the hot end of the stack and the closed end of the resonator |
| Lr | Length of the resonator |
| M | Figure of merit |
| M1 and M2 | Microphone 1 and 2 |
| p and p1 | Pressure and fluctuating pressure |
| pm | Mean pressure |
| Pr | Prandtl number |
| rp | Radius of the pin |
| R | Diameter of a tube |
| Re | Real part |
| r0 | Radius of the circle inscribed in the hexagonal pattern of pins |
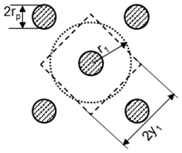
| r1 | Radius of the circle inscribed in the square pattern of pins |
| rv | Viscous resistance per unit length |
| rk | Thermal relaxation conductance per unit length |
| S | (i−1)/δv |
| Sh | Shear wavenumber |
| s’ | (i+1)/δv |
| T and T1 | Temperature and fluctuating temperature |
| T | Period of the acoustic oscillation |
| TAHE | Thermo acoustic heat engine |
| TC1, TC2 | Thermocouple 1, 2 |
| u and u1 | Particle velocity, fluctuating particle velocity |
| Vfluid | Volume of fluid in the core |
| Vsolid | Volume of solid in the core |
| Vtotal | Total volume of the core |
| Vk | Thermal diffusion volume |
| Vv | Viscous diffusion volume |
| y0 | Semi distance between adjacent pins in hexagonal pattern |
| y1 | Semi distance between adjacent pins in square pattern |
| γ | Specific heat ratio |
| ΔTc | Critical temperature differential |
| Greek letters | |
| εs | Heat capacity ratio |
| εs,c, εs,s and εs,p | Heat capacity ratios of circular pore, slit and pin array pore |
| δk | Thermal boundary layer |
| δv | Viscous boundary layer |
| k | Thermal diffusivity |
| Λ’ | Thermal characteristic length |
| μ | Dynamic viscosity |
| η | Global efficiency |
| Π | Perimeter of the cross section of the pore |
| ρ and ρm | Fluid density and mean fluid density |
| ϕ | Porosity |
| ϕw | Phase between acoustic pressure and particle velocity |
| ω | Angular frequency |
| Subscripts | |
| c | Circle |
| p | Pin |
| s | Slit |
| m | Mean |
| 1 | First order |
| 2 | Second order |
References
- Kurnitski, J. Technical definition of nearly zero energy buildings. REHVA J. 2013, 2013, 22–28. [Google Scholar]
- Piccolo, A. Study of standing-wave thermoacoustic electricity generators for low-power applications. Appl. Sci. 2018, 8, 287. [Google Scholar] [CrossRef] [Green Version]
- Hong, B.-S.; Lin, T.-Y. System identification and resonant control of thermoacoustic engines for robust solar power. Energies 2015, 8, 4138–4159. [Google Scholar] [CrossRef]
- Hariharan, N.M.; Shvashanmugam, P.; Kasthurirengam, S. Experimental investigation of a thermoacoustic refrigerator driven by a standing wave twin thermoacoustic prime mover. Int. J. Refrig. 2013, 36, 2420–2425. [Google Scholar] [CrossRef]
- Timmer, M.A.G.; de Blok, K.; van der Meer, T.H. Review on the conversion of thermoacoustic power into electricity. J. Acoust. Soc. Am. 2018, 143, 841–857. [Google Scholar] [CrossRef] [Green Version]
- Olivier, C.; Penelet, G.; Poignand, G.; Lotton, P. Active control of thermoacoustic amplification in a thermo-acoustic-electric engine. J. Appl. Phys. 2014, 115, 174905-1-6. [Google Scholar] [CrossRef] [Green Version]
- Swift, G.W. Thermoacoustics—A Unifying Perspective for Some Engines and Refrigerators, 2nd ed.; ASA Press Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Kabral, R.; Rämmal, H.; Lavrentjev, J. Acoustic studies of micro-perforates for small engine silencers. SAE Tech. Pap. 2012, 32, 107. [Google Scholar] [CrossRef]
- Lavrentjev, J.; Rämmal, H. Acoustic study on motorcycle helmets with application of novel porous materials. SAE Tech. Pap. 2019, 32, 0531. [Google Scholar]
- Rott, N. Damped and thermally driven acoustic oscillations in wide and narrow tubes. Z. Angew. Math. Phys. 1969, 20, 230–243. [Google Scholar] [CrossRef]
- Arnott, W.P.; Bass, H.E.; Raspet, R. General formulation of thermoacoustics for stacks having arbitrarily shaped pore cross sections. J. Acoust. Soc. Am. 1991, 90, 3228–3237. [Google Scholar] [CrossRef]
- Hofler, T.J. Thermoacoustic Refrigerator Design and Performance. Ph.D. Thesis, Physics Department, University of California, San Diego, CA, USA, 1986. [Google Scholar]
- Dragonetti, R.; Napolitano, M.; Di Filippo, S.; Romano, R. Modeling energy conversion in a tortuous stack for thermoacoustic applications. Appl. Therm. Eng. 2016, 103, 233–242. [Google Scholar] [CrossRef]
- Napolitano, M.; Romano, R.; Dragonetti, R. Open-cell foams for thermoacoustic applications. Energy 2017, 138, 147–156. [Google Scholar] [CrossRef]
- Swift, G.W.; Keolian, R.M. Thermoacoustics in pin-array stacks. J. Acoust. Soc. Am. 1993, 94, 941–943. [Google Scholar] [CrossRef]
- Tu, Q.; Zhang, X.; Chen, Z.; Guo, F. Design of miniature thermoacoustic refrigerator with pin-array stack. Acta Acust. United Acust. 2006, 92, 16–23. [Google Scholar]
- Matveev, K. Thermoacoustic energy analysis of transverse-pin and tortuous stack at large acoustic displacements. Int. J. Therm. Sci. 2010, 49, 1019–1025. [Google Scholar] [CrossRef]
- Asgharian, B.; Matveev, K.I. Influence of finite heat capacity of solid pins and their spacing on thermoacoustic performance of transverse-pin stacks. Appl. Therm. Eng. 2014, 62, 593–598. [Google Scholar] [CrossRef]
- Auriemma, F.; Holovenko, Y. Performance of additive manufactured stacks in a small scale thermoacous-tic engine. SAE Tech. Pap. 2019, 1, 1534. [Google Scholar] [CrossRef]
- Auriemma, F.; Holovenko, Y. Use of selective laser melting for manufacturing the porous stack of a ther-moacoustic engine. Key Eng. Mater. 2019, 799, 246–251. [Google Scholar] [CrossRef]
- Babaei, H.; Siddiqui, K. Design and optimization of thermoacoustic devices. Energy Convers. Manag. 2008, 49, 3585–3598. [Google Scholar] [CrossRef]
- Hariharan, N.M.; Shvashanmugam, P.; Kasthurirengam, S. Influence of stack geometry and resonator length on the performance of thermoacoustic engine. Appl. Acoust. 2012, 73, 1052–1058. [Google Scholar] [CrossRef]
- Majak, J.; Kuttner, F.; Pohlak, M.; Eerme, M.; Karjust, K. Application of evolutionary methods for solving optimization problems in engineering. In Proceedings of the NordDesign, NordDesign Conference, Tallinn, Estonia, 21–23 August 2008; pp. 39–48. [Google Scholar]
- Majak, J.; Pohlak, M.; Karjust, K.; Eerme, M.; Kurnitski, J.; Shvartsman, B.S. New high order Haar wavelet method: Application to FGM structures. Compos. Struct. 2018, 201, 72–78. [Google Scholar] [CrossRef]
- Tiikoja, H.; Auriemma, F.; Lavrentjev, J. Damping of acoustic waves in straight ducts and turbulent flow conditions. SAE Tech. Pap. 2016, 1, 1816. [Google Scholar] [CrossRef]
- Champoux, Y.; Allard, J.F. Dynamic tortuosity and bulk modulus in air-saturated porous media. J. Appl. Phys. 1991, 70, 1975–1979. [Google Scholar] [CrossRef]
- Johnson, D.L.; Koplik, J.; Dashen, R. Theory of dynamic permeability and tortuosity in fluid-saturated porous media. J. Fluid Mech. 1987, 176, 379–402. [Google Scholar] [CrossRef]
- Piccolo, A.; Sapienza, A.; Guglielmino, C. Convection heat transfer coefficients in thermoacoustic heat exchangers: An experimental investigation. Energies 2019, 12, 4525. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cell Type | Λ’ | ϕ | Distance between Pins | Minimum Characteristic Dimension of Solid Skeleton |
|---|---|---|---|---|
 Parallel pins (hexagonal pattern) | ||||
 Parallel pins (square pattern) | ||||
 Infinite rectangular slit | ||||
 Circular tubes (hexagonal pattern) |
| Parallel Pins | Slits | Circular Tubes | ||||
|---|---|---|---|---|---|---|
| rp/b | Λ’ [m] | ϕ | a [m] | h [m] | R [m] | d [m] |
| 0.001 | 9.05 × 101 | 1.000 | 4.51 × 101 | 4.50 × 10−5 | 9.02 × 11 | 4.50 × 10−5 |
| 0.01 | 9.18 × 10−1 | 1.000 | 4.59 × 10−1 | 4.50 × 10−5 | 9.18 × 10−1 | 4.50 × 10−5 |
| 0.05 | 3.96 × 10−2 | 0.998 | 1.98 × 10−2 | 4.50 × 10−5 | 3.96 × 10−2 | 4.50 × 10−5 |
| 0.1 | 1.08 × 10−2 | 0.992 | 5.40 × 10−3 | 4.50 × 10−5 | 1.08 × 10−2 | 4.50 × 10−5 |
| 0.29 | 1.69 × 10−3 | 0.949 | 8.45 × 10−4 | 4.50 × 10−5 | 1.69 × 10−3 | 4.50 × 10−5 |
| 0.5 | 7.20 × 10−4 | 0.889 | 3.60 × 10−4 | 4.50 × 10−5 | 7.20 × 10−4 | 4.50 × 10−5 |
| 1 | 2.70 × 10−4 | 0.750 | 1.35 × 10−4 | 4.50 × 10−5 | 2.70 × 10−4 | 4.50 × 10−5 |
| 1.5 | 1.6 × 10−4 | 0.640 | 8.00 × 10−5 | 4.50 × 10−5 | 1.60 × 10−4 | 4.50 × 10−5 |
| 2 | 1.13 × 10−4 | 0.556 | 5.63 × 10−5 | 4.50 × 10−5 | 1.13 × 10−4 | 4.50 × 10−5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Auriemma, F.; Di Giulio, E.; Napolitano, M.; Dragonetti, R. Porous Cores in Small Thermoacoustic Devices for Building Applications. Energies 2020, 13, 2941. https://doi.org/10.3390/en13112941
Auriemma F, Di Giulio E, Napolitano M, Dragonetti R. Porous Cores in Small Thermoacoustic Devices for Building Applications. Energies. 2020; 13(11):2941. https://doi.org/10.3390/en13112941
Chicago/Turabian StyleAuriemma, Fabio, Elio Di Giulio, Marialuisa Napolitano, and Raffaele Dragonetti. 2020. "Porous Cores in Small Thermoacoustic Devices for Building Applications" Energies 13, no. 11: 2941. https://doi.org/10.3390/en13112941
APA StyleAuriemma, F., Di Giulio, E., Napolitano, M., & Dragonetti, R. (2020). Porous Cores in Small Thermoacoustic Devices for Building Applications. Energies, 13(11), 2941. https://doi.org/10.3390/en13112941