On the Comparison of 2- and 4-Wheel-Drive Electric Vehicle Layouts with Central Motors and Single- and 2-Speed Transmission Systems


 ,
,  and
and
Abstract
:1. Introduction
- A drivability analysis based on the frequency and time response characteristics of 2WD and 4WD powertrain layouts, excluding and including the effect of the anti-jerk control action;
- A unified optimization routine to find the energy-efficient transmission state and front-to-total torque distribution for each operating condition of the EV, to provide a fair comparison among the considered architectures;
- A comparison of the resulting acceleration, gradeability and energy consumption performance.
2. Electric Vehicle Layouts and Simulation Models
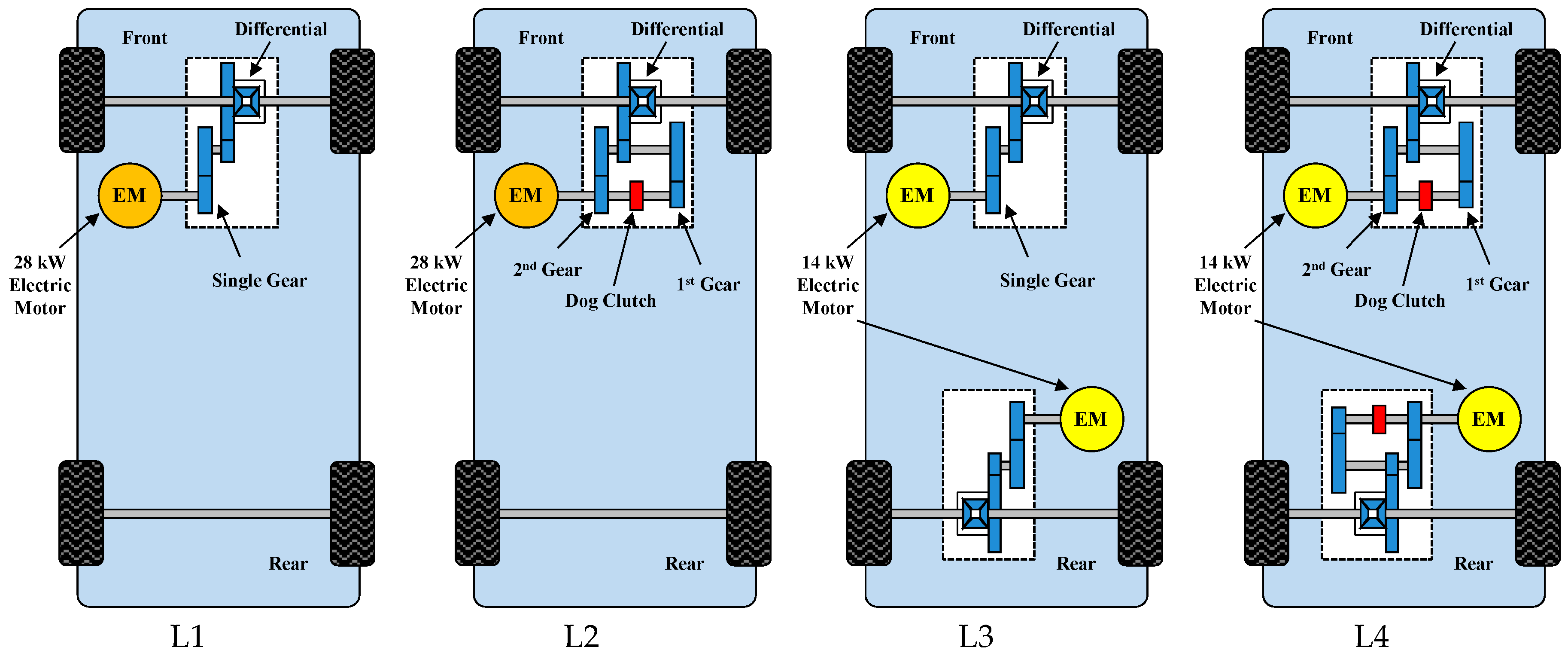
2.1. Electric Vehicle Layouts
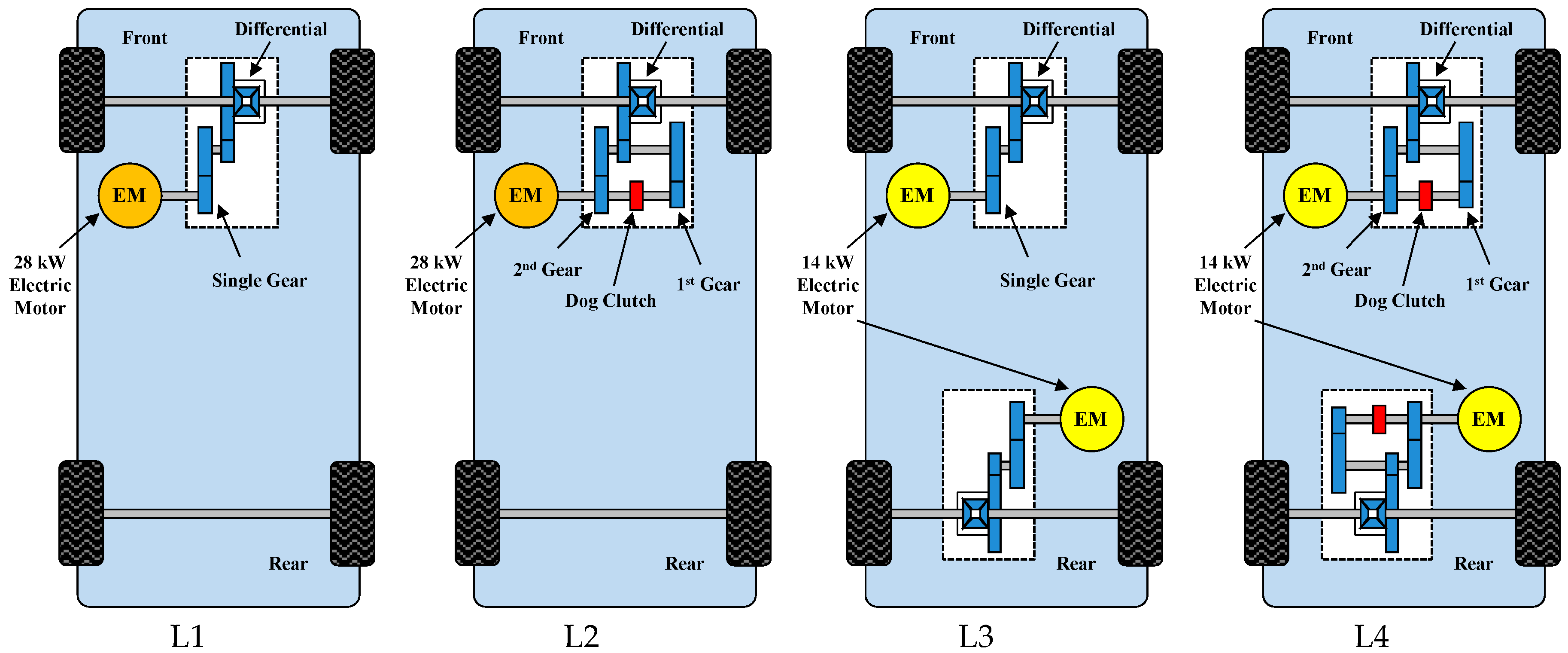
- Layout L1: a 2WD configuration with a single front 28 kW (peak power value) electric motor coupled with a single-speed transmission. The gear ratio was chosen by the involved industrial companies as a trade-off between gradeability and top speed.
- Layout L2: a 2WD configuration, which differs from L1 for the adoption of a 2-speed transmission. The design is a cost-driven simplification of the 2-speed transmission in [14,18], by excluding the friction and sprag clutches, which are replaced by a dog clutch. During the gearshifts, the synchronization is controlled through the electric motor drive [20,21], at the price, with respect to the more sophisticated original design, of a wheel torque gap. The first gear ratio provides the required longitudinal acceleration and gradeability performance, while the second gear ratio ensures the desired top speed.
- Layout L3: a 4WD configuration with two 14 kW electric motors, connected to the respective axle through single-speed transmissions.
- Layout L4: a 4WD configuration, which differs from L3 for the adoption, within each axle, of the same 2-speed transmission system as in L2. In this EV layout, a torque-fill controller provides seamless gearshifts at low-to-medium wheel torque demands, through the variation of the torque on the axle not involved in the gearshift [20,21].
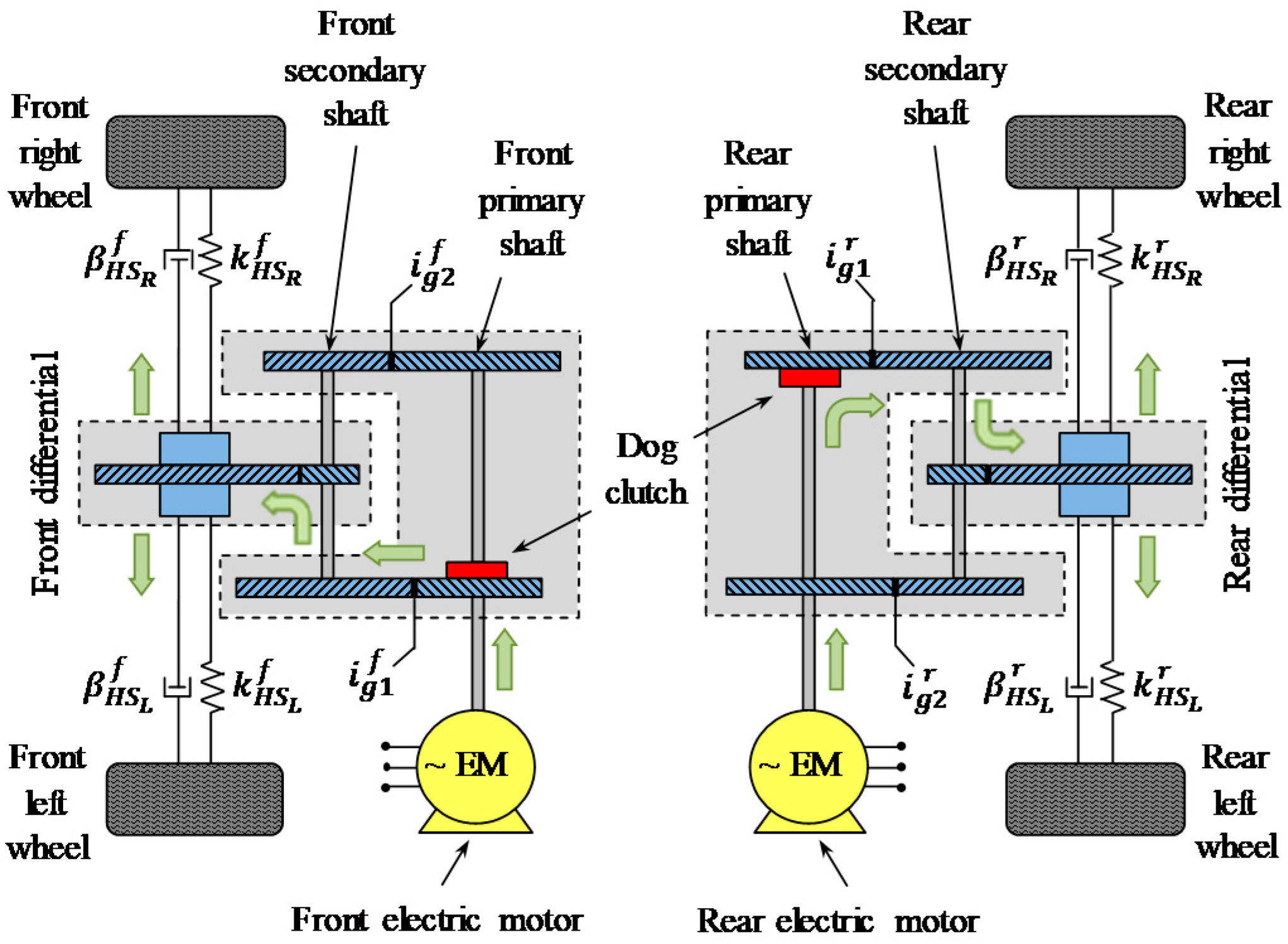
2.2. Nonlinear Model
- Engaged first gear, i.e., with the dog clutch engaged such that the primary and secondary shafts rotate according to the first gear ratio;
- Engaged second gear, i.e., with the dog clutch engaging the corresponding gear;
- Disengaged gear: in this condition the drivetrain is characterized by two degrees of freedom, as the electric motor is decoupled from the secondary transmission shaft.
2.3. Linearized Model
3. Drivability Analysis
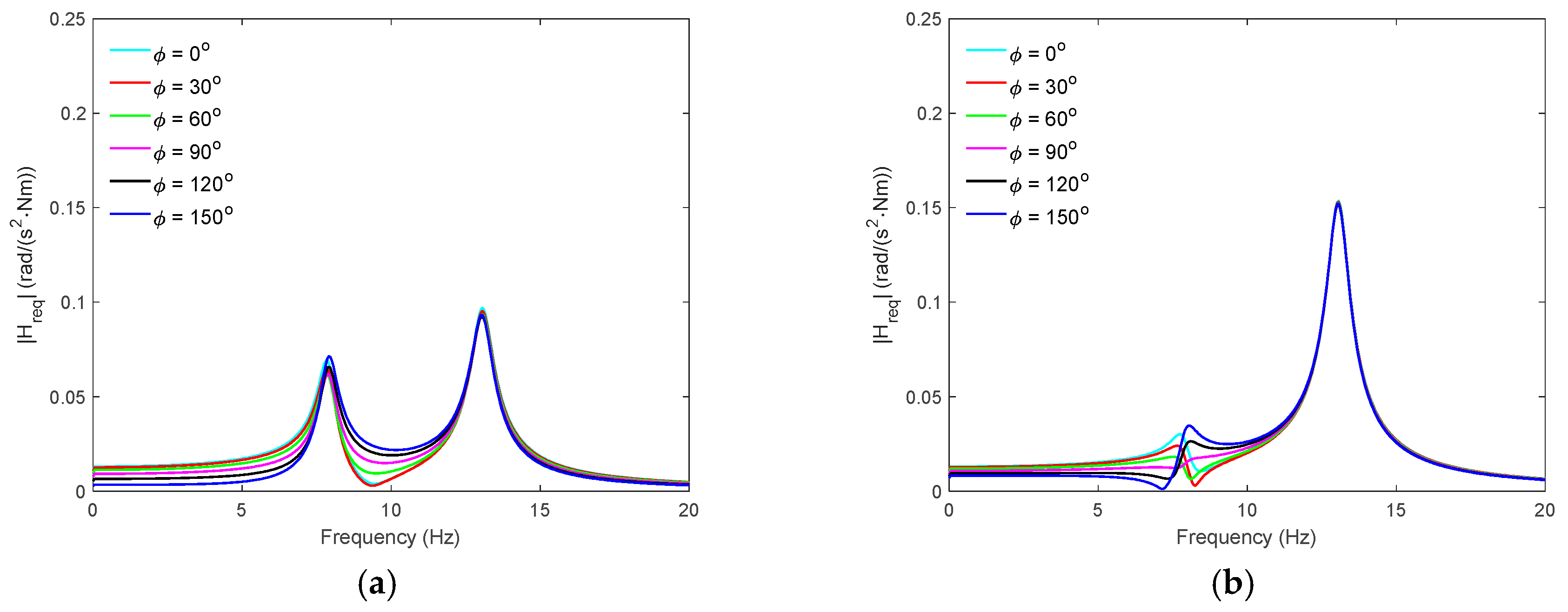
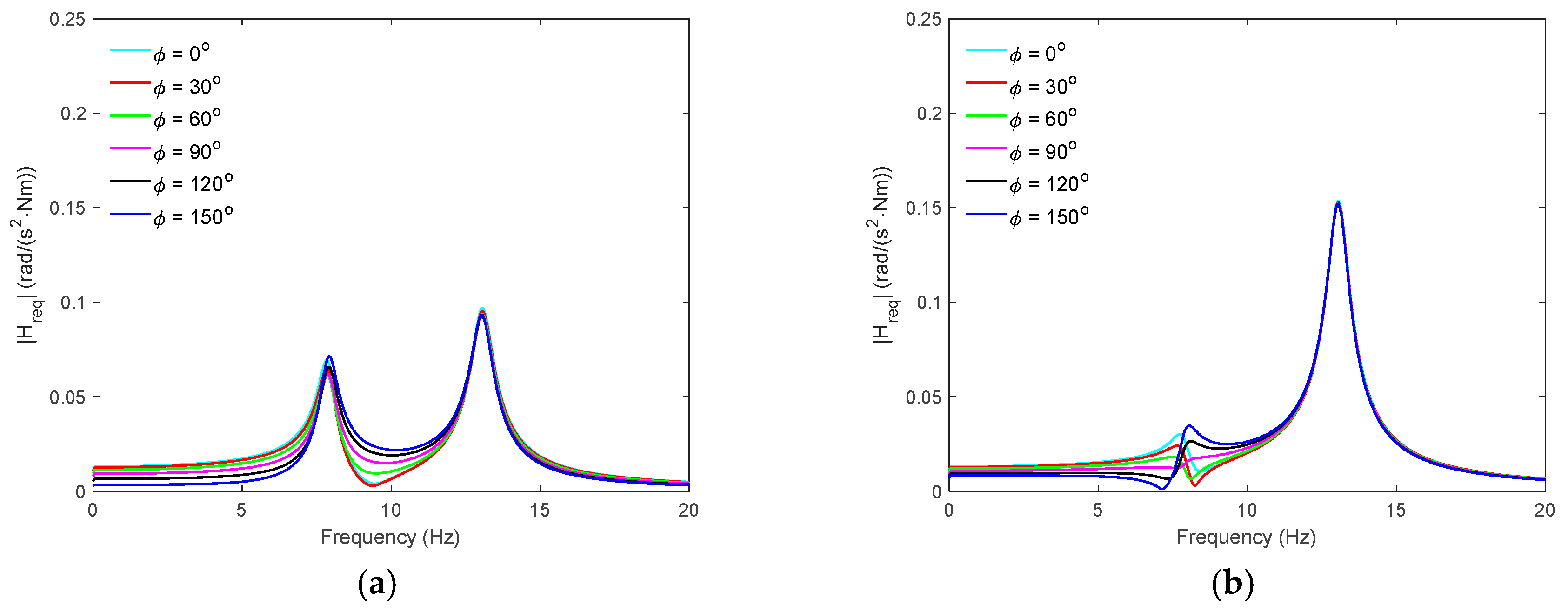
3.1. Frequency Response Characteristics
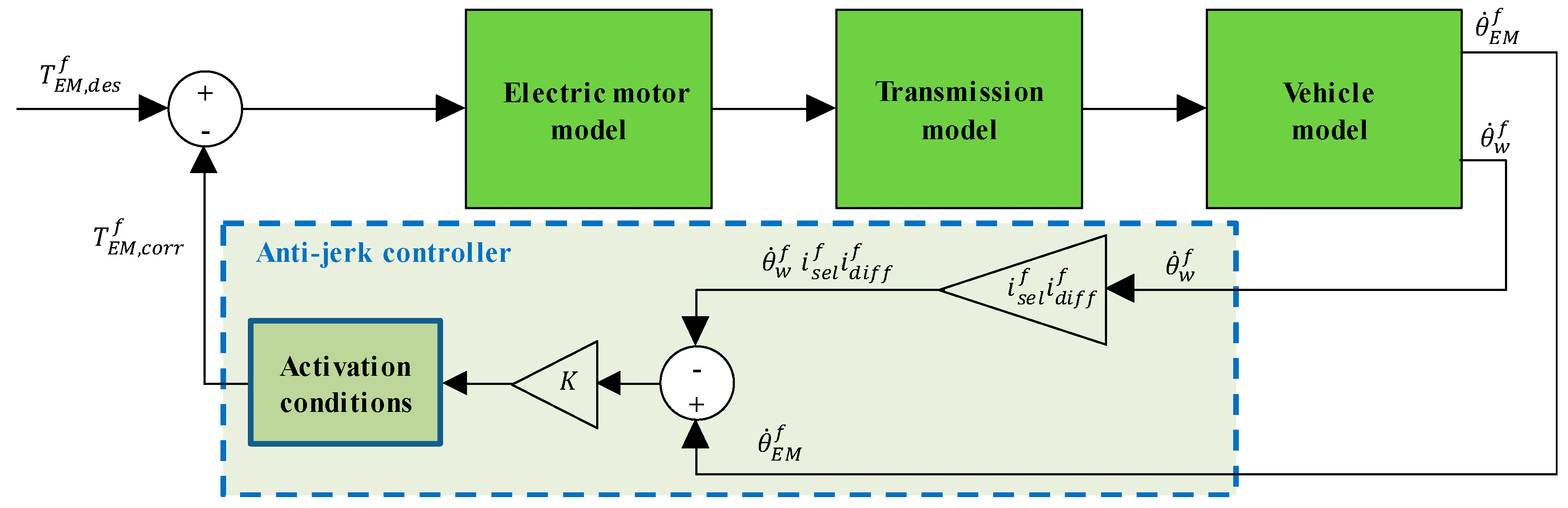
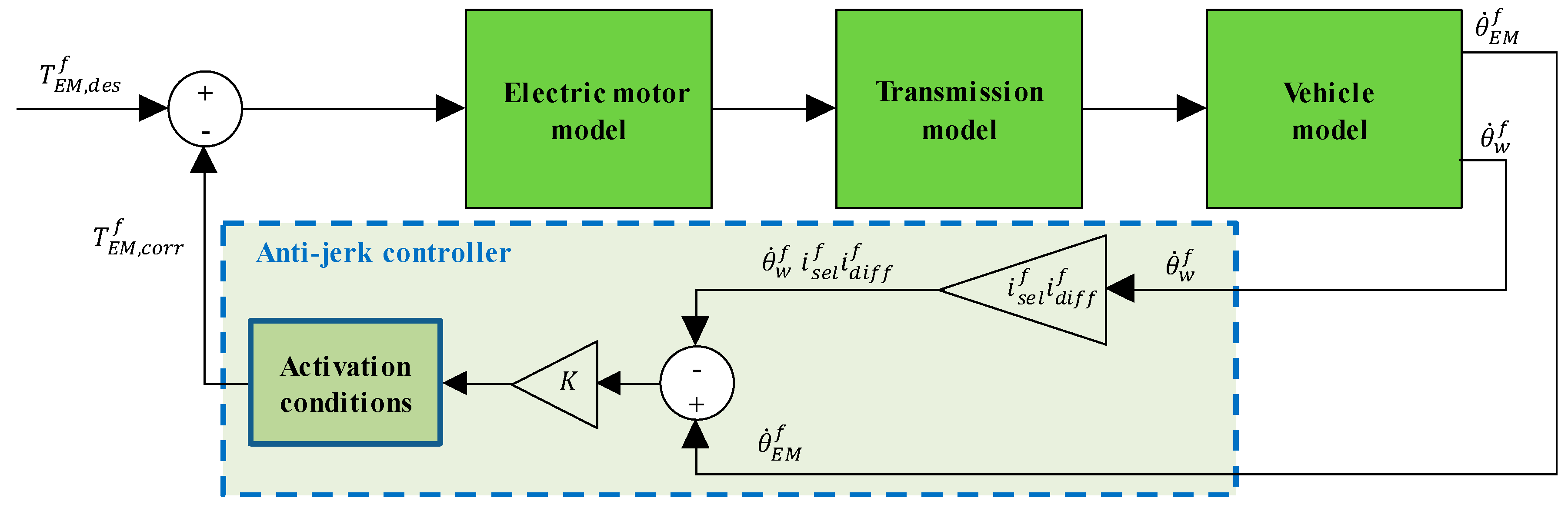
3.2. Anti-Jerk Controller
3.3. Drivability Assessment
- The fourth-power vibration dose value of the longitudinal acceleration, , evaluating the vehicle comfort level:where is the difference between the actual EV acceleration profile, , and the acceleration value, , computed at the time = 1.5 s, in which the acceleration can be considered stabilized to its steady-state value in all controlled configurations:is the time in which crosses zero for the first time during the tip-in.
- The root-mean-square value of , i.e., :
- The difference of the resulting EV speeds at , without and with anti-jerk controller, i.e., and :which evaluates the degradation of the acceleration performance induced by the controller.
- The response time,, evaluated as the difference between the times in which the longitudinal acceleration profile crosses 90% and 10% of for the first time after the variation of the torque demand request.
- The settling time, , i.e., the time that is required for to remain within a given range of percentage (2.5%) of , evaluated in the interval .
- The peak response time, , evaluated as the difference between the time of the first acceleration peak, and the time corresponding to the first crossing of after the variation of torque demand request.
- The overshoot, , expressed in percentage, calculated from the difference between the peak acceleration value and .
- The integral (normalized with time) of the absolute value of the anti-jerk control actions, which evaluates the magnitude of the control effort:
4. Routine for Selection of Optimal Gear State and Front-to-Total Wheel Torque Distribution
4.1. Structure of the Optimization Routine
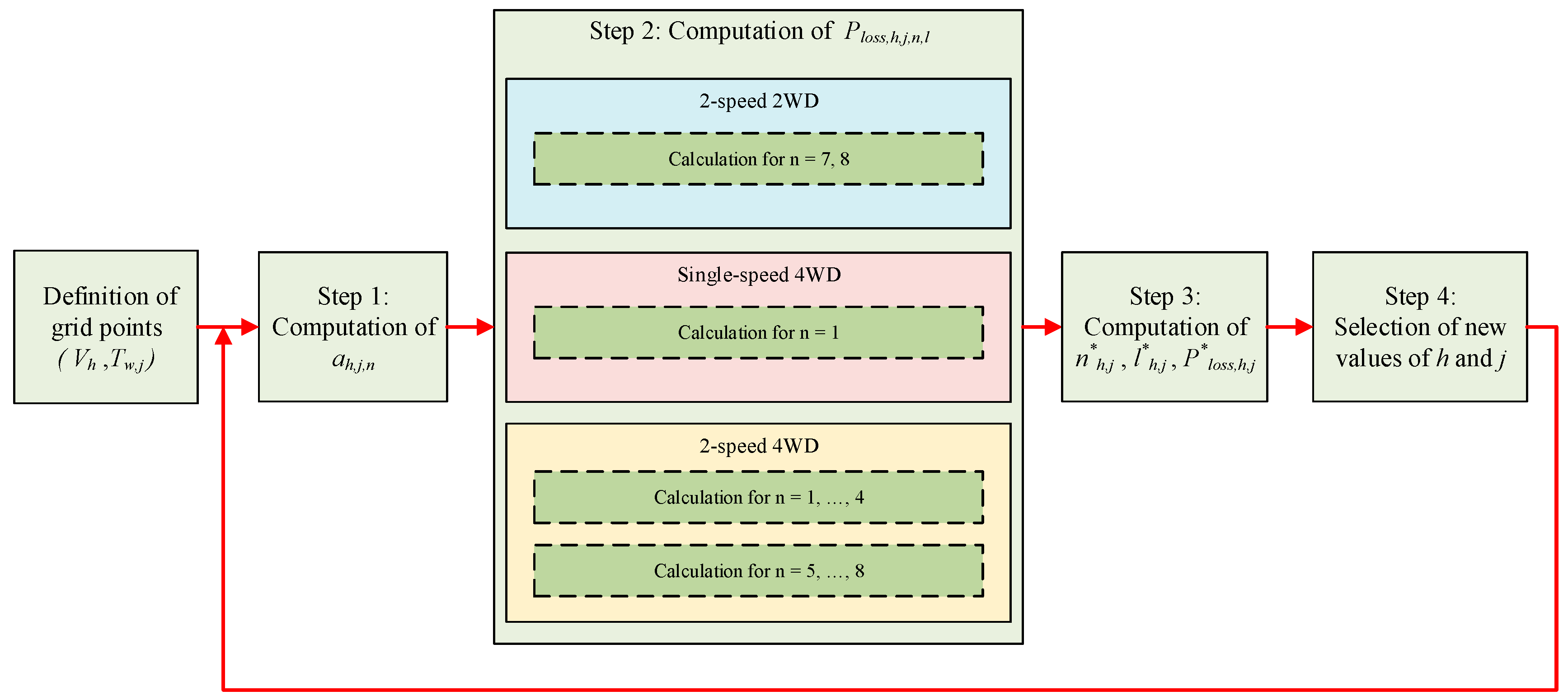
- Step 1: Computation of the longitudinal vehicle acceleration, , for each feasible EV state, , under the assumption of known road gradient:where the apparent vehicle mass, , function of , is:represents the equivalent mass moment of inertia of the rotating parts of the considered powertrain. The feasibility of a state corresponds to its capability of generating the required wheel torque at the assigned speed. An approximate option, available in the routine, is to neglect the inertial effects in Steps 1–2, which simplifies the problem without significant drawbacks, especially if the vehicle is not equipped with an on-line estimator of mass and road gradient.
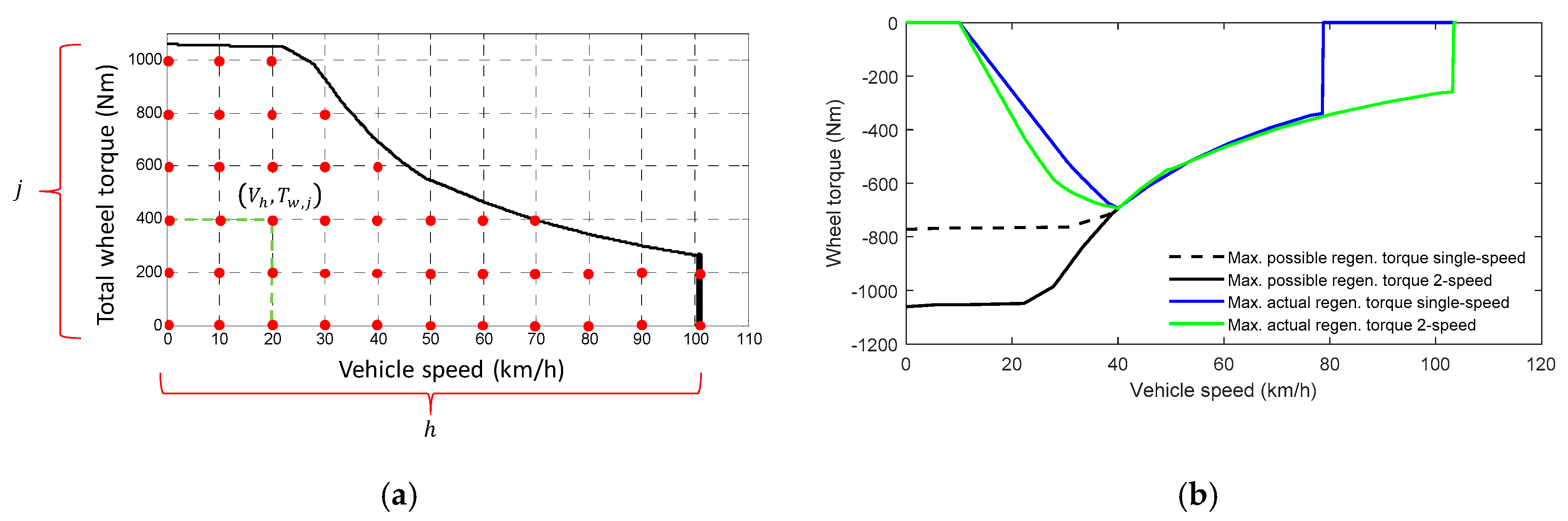
- Step 2: Computation of the sum, , of the transmission, electric motor, inverter and rolling resistance power losses at the selected grid point , for each of its feasible states and—where relevant depending on the state—along a further grid, defined by the index , covering the feasible range of front-to-total wheel torque distributions. The front-to-total torque distribution corresponds to the inner loop of the routine. In the most general case, corresponding to L4, is given by:where , and are provided in the form of maps. The motor drive and transmission power loss maps are functions of the respective input torque and angular speed, calculated for the specific grid point through a backward facing rigid drivetrain model. The tire slip power losses are neglected by the optimization routine.
- Step 3: Selection of the state, , and (where applicable) front-to-total torque distribution, , which minimize the drivetrain power losses for the operating condition defined by and :and are stored in the look-up tables of the on-line implementation of the controller.
- Step 4: Selection of new values of and on the defined grid and repetition the process from Step 1.
4.2. Optimal State Selection for the 2-Speed 2WD Layout (L2)
4.3. Single-Speed 4WD Layout (L3)
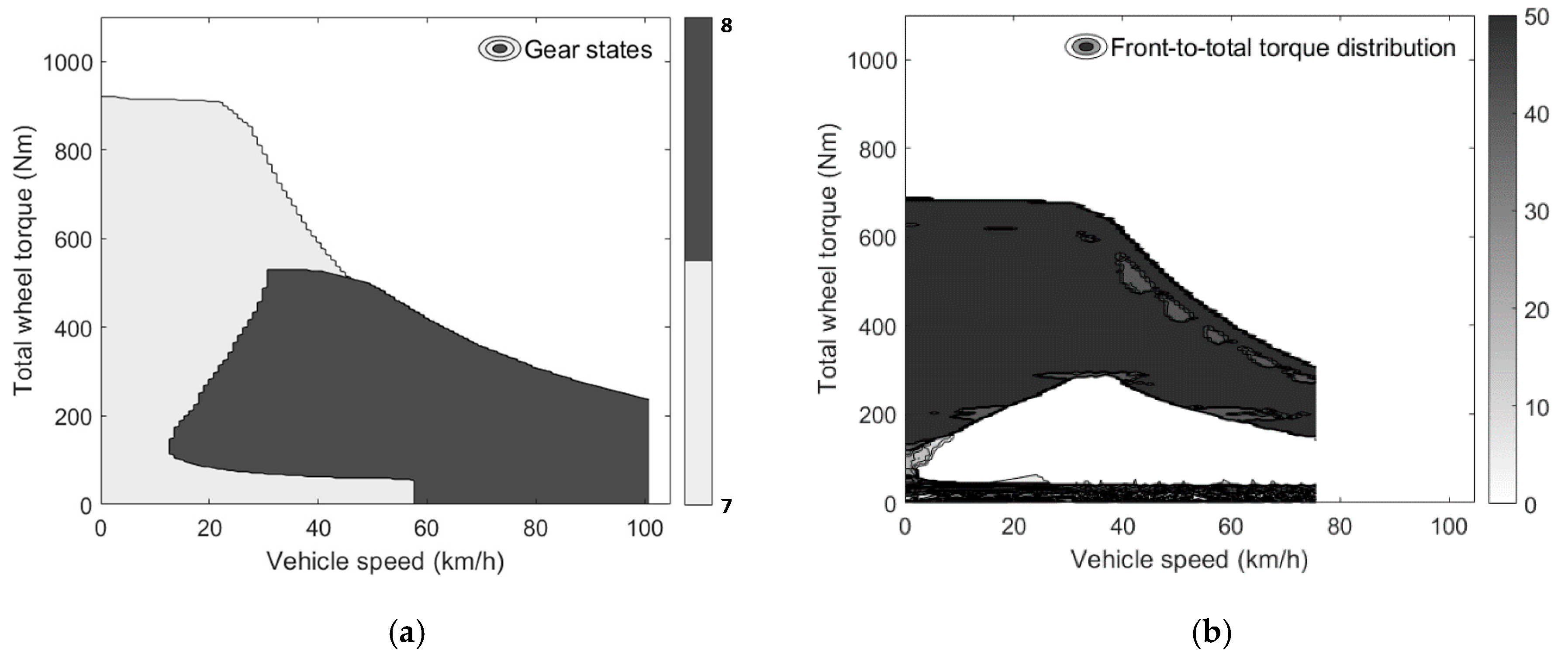
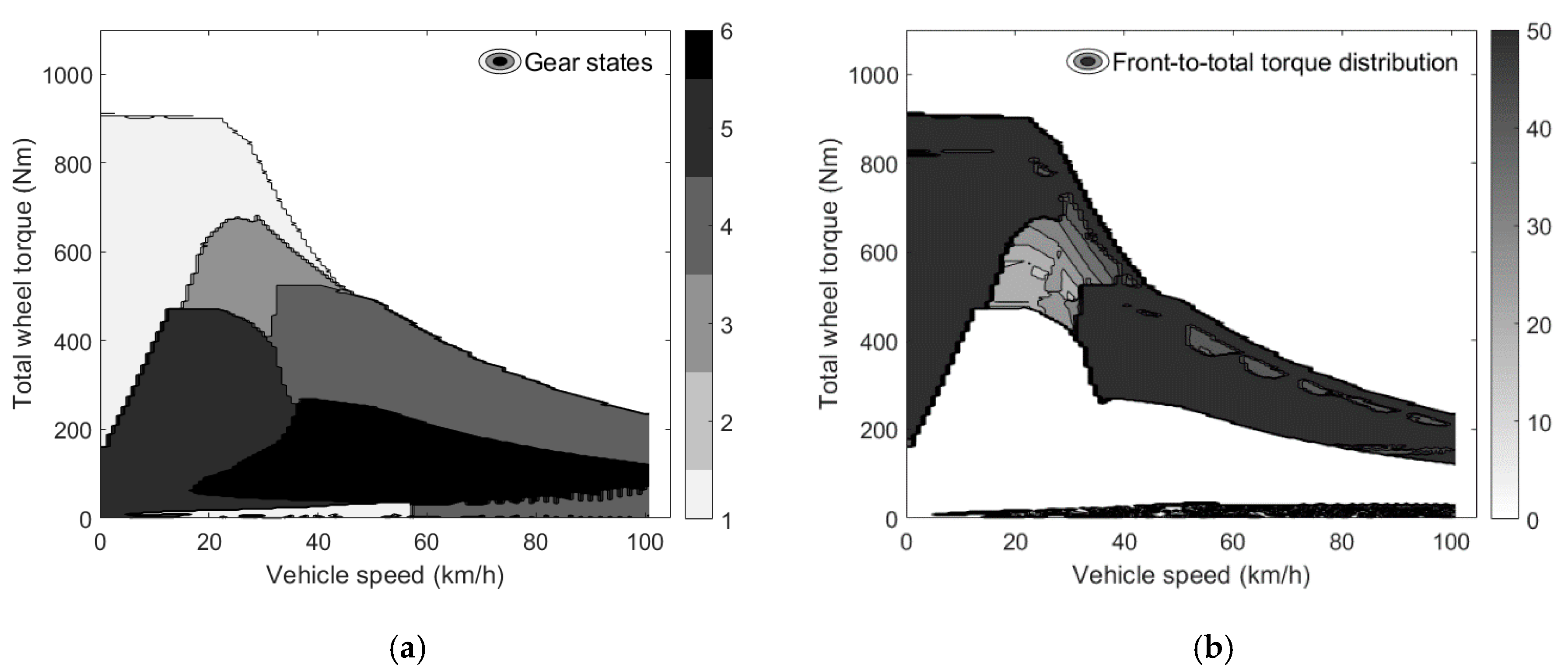
4.4. 2-Speed 4WD Layout (L4)
5. Acceleration, Gradeability, and Consumption Results
5.1. Acceleration and Gradeability Performance
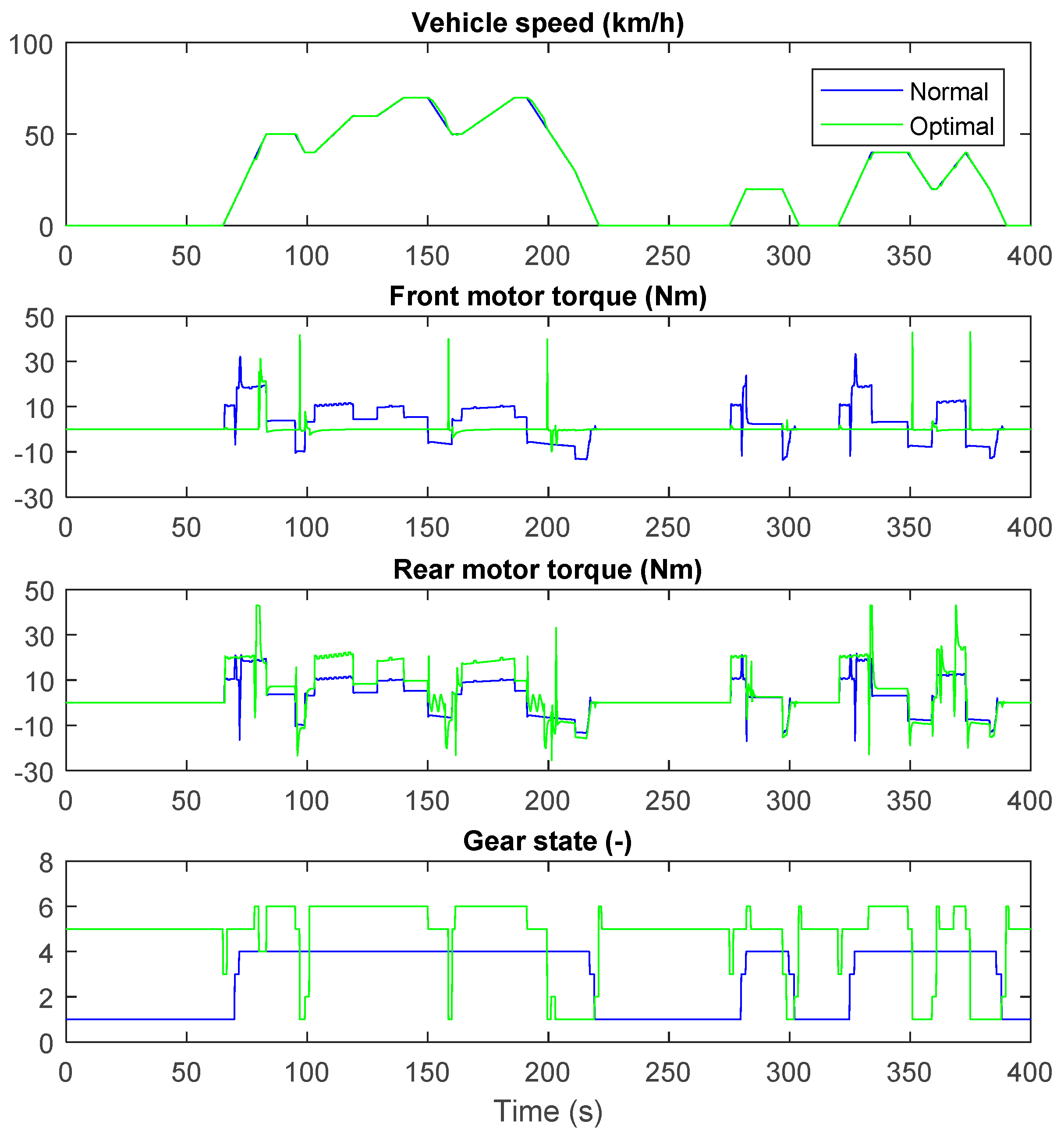
5.2. Energy Consumption
6. Conclusions
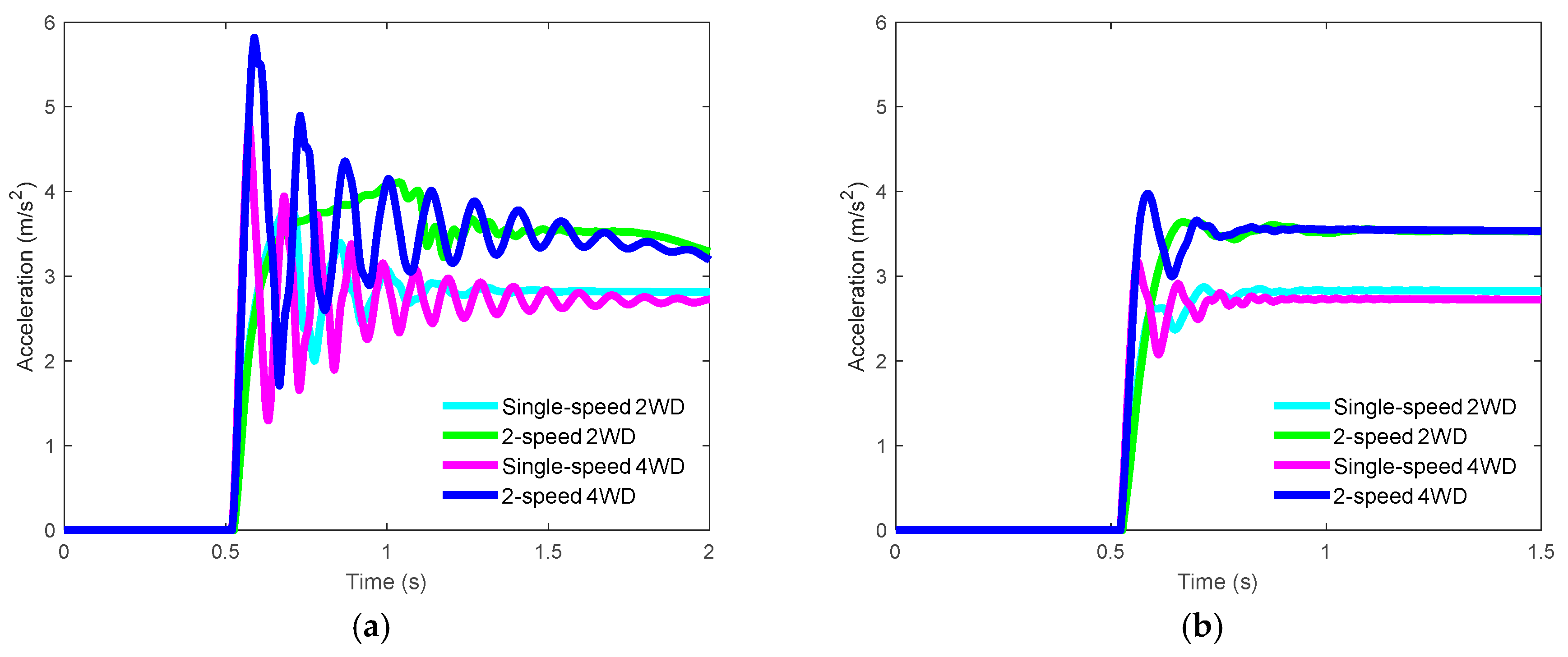
- The fast dynamics of typical traction motors, in conjunction with the low mechanical damping of electric drivetrains, can provoke significant resonances and torsional vibrations of the driveline. The electrical dynamics and mass moment of inertia of the electric machine/s, together with the transmission gear ratio and torsion stiffness of the half-shafts, are the key parameters affecting the magnitude and frequency of the resulting vibrations.
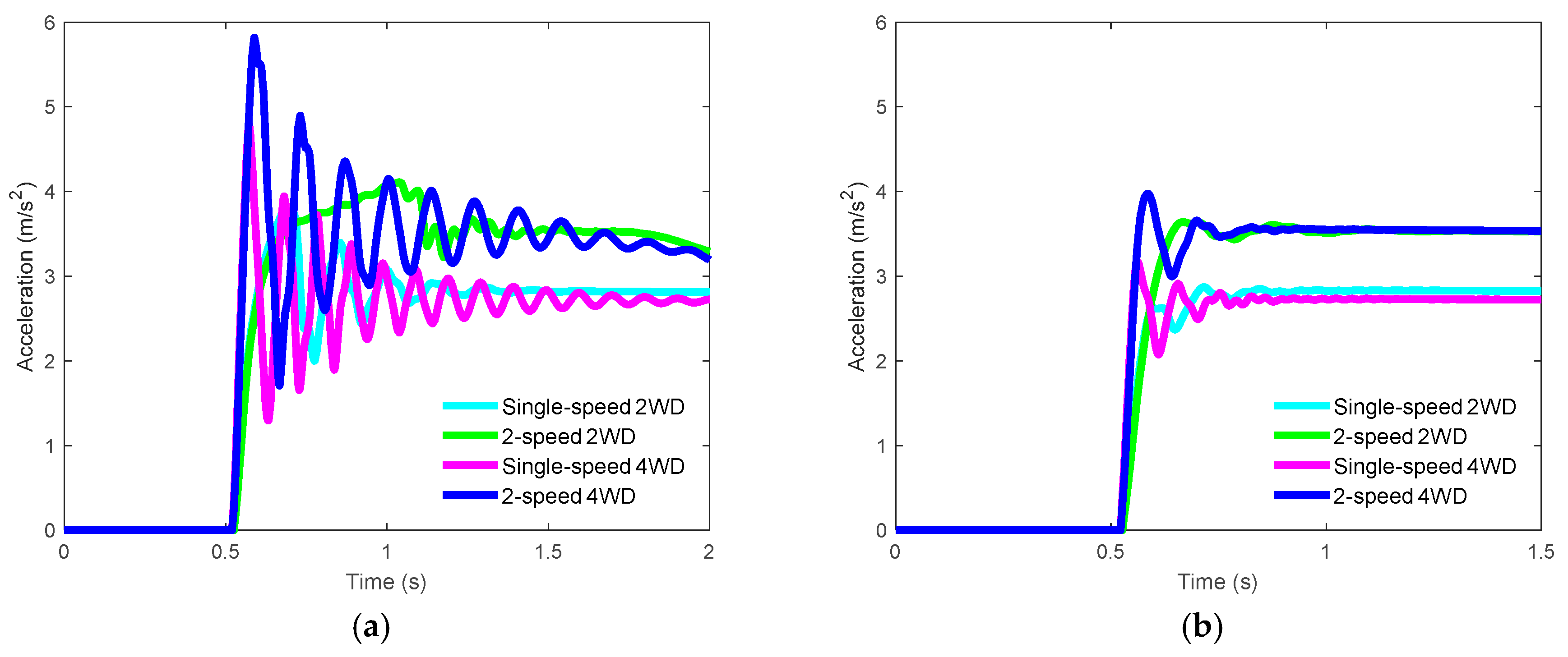
- 2-speed transmission systems and 4WD layouts add complexity and criticalities to the drivability response of the EV, and thus to the tuning of the anti-jerk controller. Without anti-jerk control, typical electric powertrains with central motor excite significant oscillations of the longitudinal acceleration of the EV during tip-in tests. The vibrations are effectively compensated by the proposed anti-jerk control scheme in all considered EV configurations, with a more reactive response of the 4WD layouts.
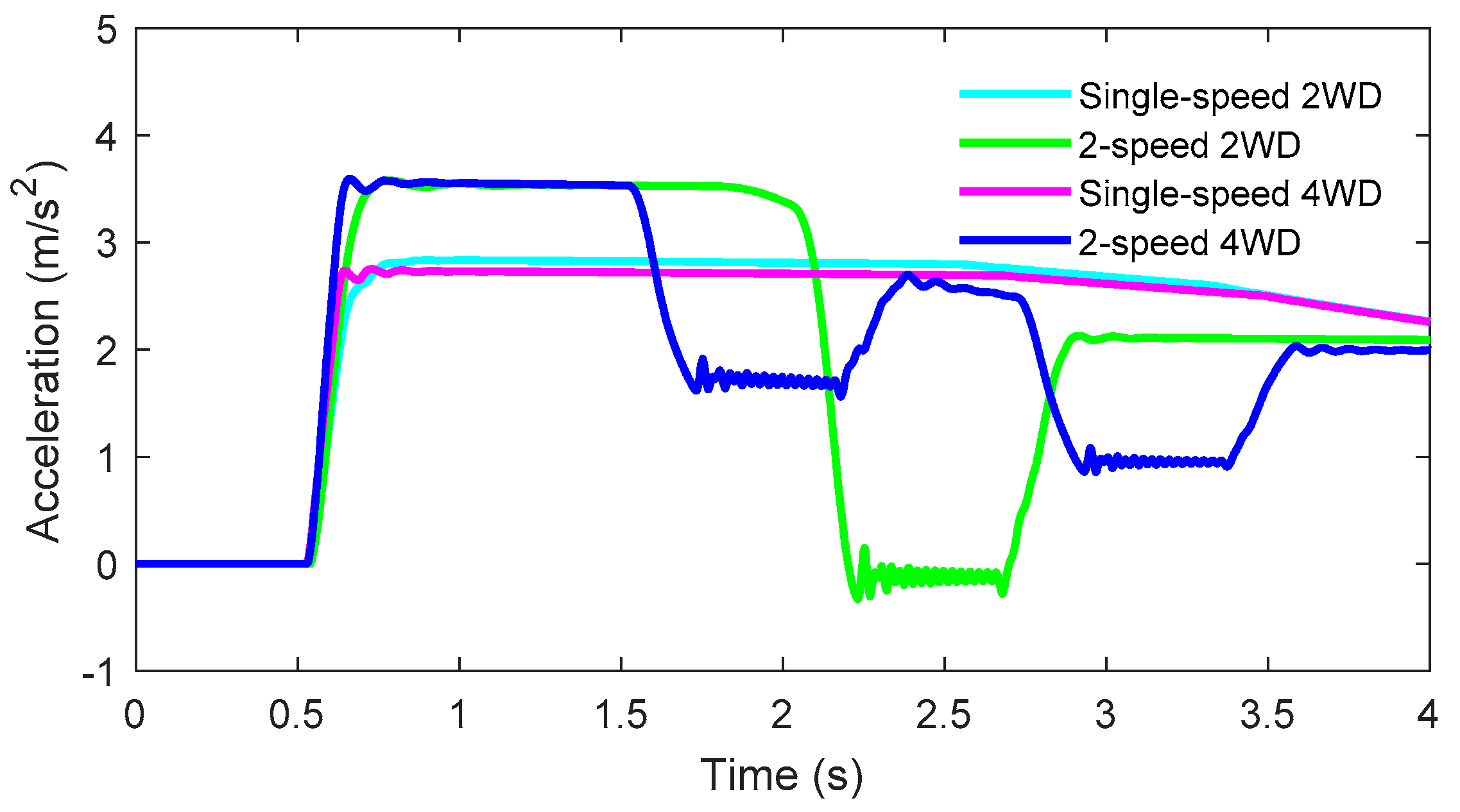
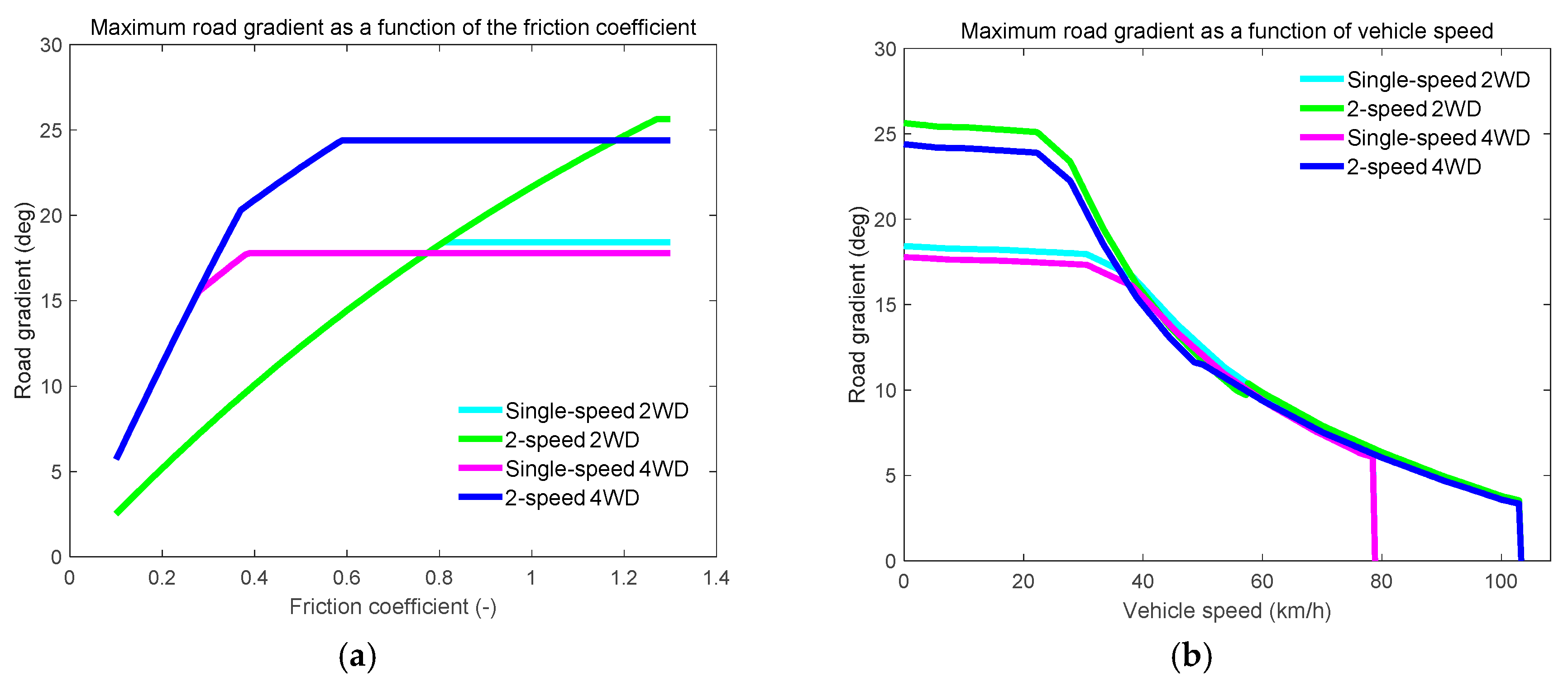
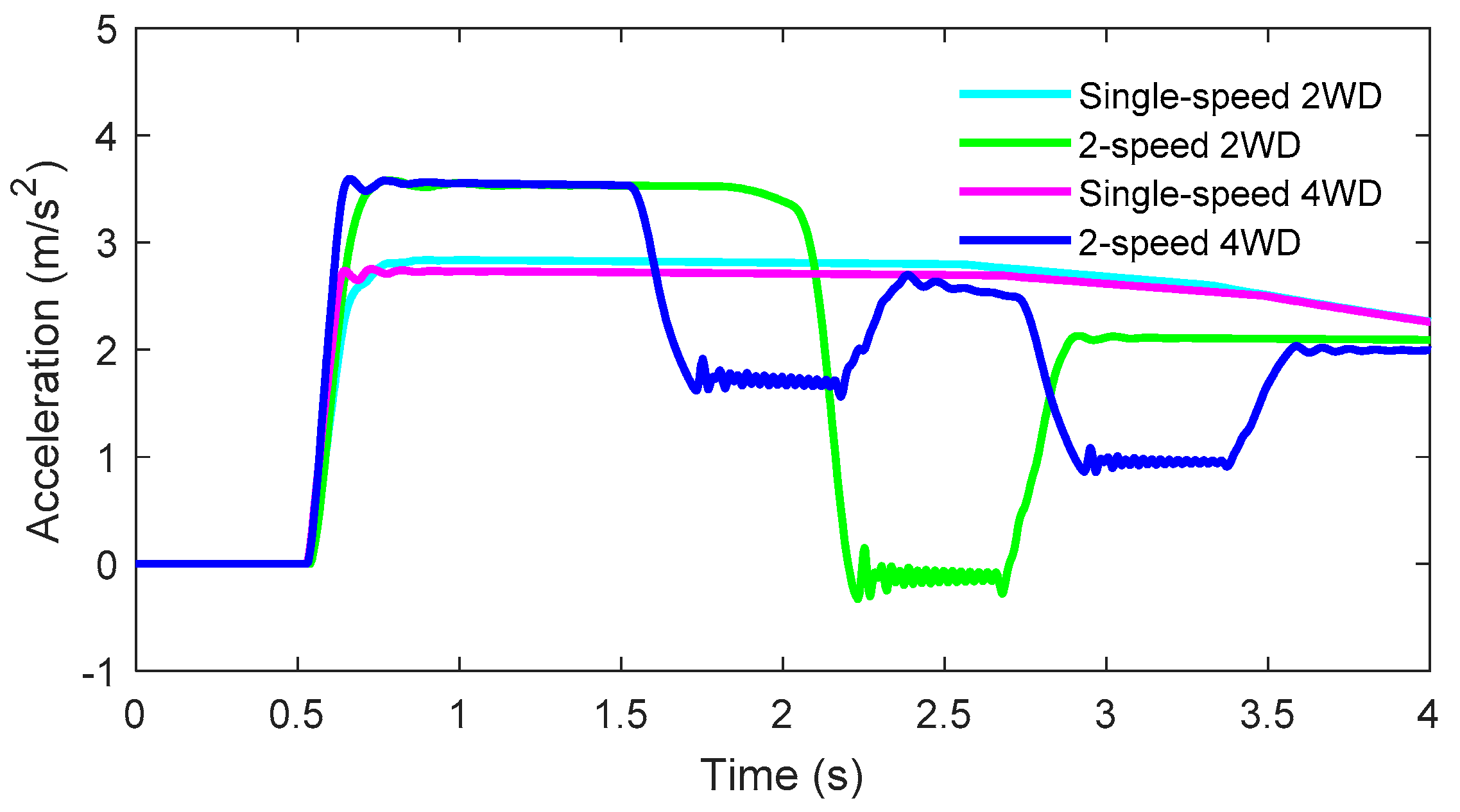
- At high torque demand, the gearshift dynamics significantly penalize the drivability and longitudinal acceleration performance of the EV layouts with the considered 2-speed transmission systems, as in these conditions the axle not involved in the gearshift cannot compensate for the wheel torque gap on the other axle. Despite this inconvenience, 2-speed transmissions expand the high efficiency operating region of the powertrain and increase top speed and gradeability.
- In terms of energy consumption, for the case study EV, during constant speed operation, i.e., at low torque demands, the prevailing effect is the mass increase associated with the advanced powertrain configurations. Hence, the best energy consumption performance is provided by the conventional single-speed 2WD EV layout. On the contrary, the increased flexibility in the operating conditions of the electric powertrains, provided by the more advanced EV architectures, reduces the energy consumption along driving cycles, with the single-speed 4WD vehicle achieving the lowest consumption.
- The single-speed 4WD layout does not require transmission controllers nor gearshift actuators, and, for the case study EV, can be considered an effective configuration, achieving a good compromise between predictable drivability, acceleration performance, gradeability for a variety of friction conditions, and energy consumption.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Longitudinal vehicle acceleration. | |
| Longitudinal vehicle acceleration difference with respect to the steady-state value (see Section 3). | |
| Longitudinal slip stiffness. | |
| Force. | |
| Gravitational acceleration. | |
| Index corresponding to the vehicle speed value within the discrete grid (also used as a subscript). | |
| Transfer function from wheel torque demand to angular vehicle acceleration. | |
| Transmission gear ratio. | |
| Integral (normalized with time) of the absolute value of the control action. | |
| Index corresponding to the wheel torque value within the discrete grid (also used as a subscript). | |
| Mass moment of inertia. | |
| Torsional stiffness. | |
| Anti-jerk controller gain. | |
| Index indicating the front-to-total wheel torque distribution within the discrete grid (also used as a subscript). | |
| Length. | |
| Vehicle mass. | |
| Index indicating the vehicle state number (also used as a subscript). | |
| Overshoot. | |
| Torque distribution factor. | |
| Power. | |
| Radius. | |
| Root mean square. | |
| Laplace operator and its imaginary part. | |
| Time. | |
| Torque. | |
| Vehicle speed. | |
| Fourth-power vibration dose value. | |
| Gearbox actuator position. | |
| Angle defining the longitudinal road gradient. | |
| Torsional damping coefficient. | |
| Angular position, speed, acceleration. | |
| Efficiency. | |
| Slip ratio. | |
| Time constant or pure time delay. | |
| Phase angle difference between front and rear motor inputs. |
| Gearbox actuator. | |
| Aerodynamic drag. | |
| Apparent. | |
| Anti-jerk controller. | |
| Deactivated anti-jerk controller. | |
| Activated anti-jerk controller. | |
| Brake. | |
| Corrective. | |
| Delay. | |
| Demand. | |
| Desired (or reference) value. | |
| Differential. | |
| Electric motor. | |
| Electric motor and drive. | |
| Equivalent. | |
| Front. | |
| Gear 1, gear 2, disengaged gear. | |
| Half-shaft. | |
| Left. | |
| Loss (referred to a power). | |
| Peak of the response. | |
| Primary shaft, secondary shaft. | |
| Rear. | |
| Tire relaxation. | |
| Requested. | |
| Right. | |
| Response time. | |
| Rolling resistance. | |
| Steady-state. | |
| Selected gear ratio (first, second or neutral). | |
| Settling time of the response. | |
| Transmission. | |
| Vehicle. | |
| Wheel. | |
| Windage and friction. | |
| Optimal value. | |
| Initial condition or linearization point. | |
| Initial point of relevant interval. | |
| Final point of relevant interval. |
References
- Wu, G.; Zhang, X.; Dong, Z. Powertrain architectures of electrified vehicles: Review, classification and comparison. J. Frankl. Inst. 2015, 352, 425–448. [Google Scholar] [CrossRef]
- De Novellis, L.; Sorniotti, A.; Gruber, P.; Orus, J.; Rodriguez Fortun, J.M.; Theunissen, J.; De Smet, J. Direct yaw moment control actuated through electric drivetrains and friction brakes: Theoretical design and experimental assessment. Mechatronics 2015, 26, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Murata, S. Innovation by in-wheel-motor drive unit. Veh. Syst. Dyn. 2012, 50, 807–830. [Google Scholar] [CrossRef]
- Shao, L.; Hartavi Karci, A.E.; Tavernini, D.; Sorniotti, A.; Cheng, M. Design approaches and control strategies for energy-efficient electric machines for electric vehicles—A review. IEEE Access 2020, in press. [Google Scholar] [CrossRef]
- Mutoh, N.; Kazama, T.; Takita, K. Driving characteristics of an electric vehicle system with independently driven front and rear wheels. IEEE Trans. Ind. Electron. 2006, 53, 803–813. [Google Scholar] [CrossRef]
- Sinha, P.; Agrawal, V. Evaluation of electric-vehicle architecture alternatives. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 6–9 September 2011. [Google Scholar]
- ISO. Road Vehicles—Functional Safety; ISO/FDIS Standard No. 26262:2018; ISO: Geneva, Switzerland.
- Available online: https://www.rimac-automobili.com/en/hypercars/c_two/ (accessed on 15 June 2020).
- Direct-Drive in-Wheel Motors. Available online: https://in-wheel.com/en/solutions/direct-drive-in-wheel-motors/ (accessed on 15 June 2020).
- De Filippis, G.; Lenzo, B.; Sorniotti, A.; Gruber, P.; De Nijs, W. Energy-efficient torque-vectoring control of electric vehicles with multiple drivetrains. IEEE Trans. Veh. Technol. 2018, 67, 4702–4715. [Google Scholar] [CrossRef]
- Tavernini, D.; Metzler, M.; Gruber, P.; Sorniotti, A. Explicit nonlinear model predictive control for electric vehicle traction control. IEEE Trans. Control Syst. Technol. 2019, 27, 1438–1451. [Google Scholar] [CrossRef]
- De Novellis, L.; Sorniotti, A.; Gruber, P. Design and comparison of the handling performance of different electric vehicle layouts. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 218–232. [Google Scholar] [CrossRef] [Green Version]
- Ruan, J.; Walker, P.; Zhang, N. A comparative study energy consumption and costs of battery electric vehicle transmissions. Appl. Energy 2016, 165, 119–134. [Google Scholar] [CrossRef] [Green Version]
- Sorniotti, A.; Loro Pilone, G.; Viotto, F.; Bertolotto, S.; Everitt, M.; Barnes, R.; Morrish, I. A novel seamless 2-speed transmission system for electric vehicles: Principles and simulation results. SAE Int. J. Engines 2011, 4, 2671–2685. [Google Scholar] [CrossRef]
- Sorniotti, A.; Subramanyan, S.; Turner, A.; Cavallino, C.; Viotto, F.; Bertolotto, S. Selection of the optimal gearbox layout for an electric vehicle. SAE Int. J. Engines 2011, 4, 1267–1280. [Google Scholar] [CrossRef]
- Spanoudakis, P.; Tsourveloudis, N.; Koumartzakis, G.; Krahtoudis, A.; Karpouzis, T.; Tsinaris, I. Evaluation of a 2-speed transmission on electric vehicle’s energy consumption. In Proceedings of the IEEE International Electric Vehicle Conference (IEVC), Florence, Italy, 17–19 December 2014. [Google Scholar]
- Gao, B.; Liang, Q.; Xiang, Y.; Guo, L.; Chen, H. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle. Mech. Syst. Signal Process. 2015, 50–51, 615–631. [Google Scholar] [CrossRef]
- Sorniotti, A.; Holdstock, T.; Loro Pilone, G.; Viotto, F.; Bertolotto, S.; Everitt, M.; Barnes, R.; Stubbs, B.; Westby, M. Analysis and simulation of the gearshift methodology for a novel two-speed transmission system for electric powertrains with a central motor. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 915–929. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://www.porsche.com/international/aboutporsche/e-performance/magazine/e-performance-advantages/ (accessed on 9 May 2020).
- De Pinto, S.; Sorniotti, A.; Gruber, P.; Camocardi, P.; Perlo, P.; Viotto, F. Gear shift control with torque-fill for a 4-wheel-drive fully electric vehicle. In Proceedings of the International Conference on Sustainable Mobility Applications, Renewables and Technology (SMART), Kuwait City, Kuwait, 23–25 November 2015. [Google Scholar]
- De Pinto, S.; Camocardi, P.; Sorniotti, A.; Gruber, P.; Perlo, P.; Viotto, F. Torque-fill control and energy management for a four-wheel-drive electric vehicle layout with two-speed transmissions. IEEE Trans. Ind. Appl. 2016, 53, 447–458. [Google Scholar] [CrossRef]
- Baraszu, R.; Cikanek, S. Torque fill-in for an automated shift manual transmission in a parallel hybrid electric vehicle. In Proceedings of the American Control Conference, Anchorage, AK, USA, 8–10 May 2002. [Google Scholar]
- Kwon, K.; Seo, M.; Min, S. Efficient multi-objective optimization of gear ratios and motor torque distribution for electric vehicles with two-motor and two-speed powertrain system. Appl. Energy 2020, 259, 114190. [Google Scholar] [CrossRef]
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- Bottiglione, F.; De Pinto, S.; Mantriota, G.; Sorniotti, A. Energy consumption of a battery electric vehicle with infinitely variable transmission. Energies 2014, 7, 8317–8337. [Google Scholar] [CrossRef] [Green Version]
- Holdstock, T.; Sorniotti, A.; Everitt, M.; Fracchia, M.; Bologna, S.; Bertolotto, S. Energy consumption analysis of a novel four-speed dual motor drivetrain for electric vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Seoul, Korea, 9–12 October 2012; pp. 295–300. [Google Scholar]
- Ruan, J.; Song, Q. A novel dual-motor two-speed direct drive battery electric vehicle drivetrain. IEEE Access 2019, 7, 54330–54342. [Google Scholar] [CrossRef]
- Nguyen, C.T.; Walker, P.D.; Zhang, N.; Ruan, J. Efficiency improvement of a novel dual motor powertrain for plug-in hybrid electric buses. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 1869–1882. [Google Scholar] [CrossRef]
- De Carlo, M.; Mantriota, G. Electric vehicles with two motors combined via planetary gear train. Mech. Mach. Theory 2020, 148, 103789. [Google Scholar] [CrossRef]
- Wu, J.; Liang, J.; Ruan, J.; Zhang, N.; Walker, P.D. Efficiency comparison of electric vehicles powertrains with dual motor and single motor input. Mech. Mach. Theory 2018, 128, 569–585. [Google Scholar] [CrossRef]
- Scamarcio, A.; Gruber, P.; De Pinto, S.; Sorniotti., A. Anti-jerk controllers for automotive applications: A review. Annu. Rev. Control 2020, in press. [Google Scholar]
- Towards a Fast Uptake of mEdium/Low-Voltage Electric Powertrains (TELL). 2019. Available online: https://horizon2020-tell.eu/ (accessed on 9 May 2020).
- Pacejka, H.B. Tyre and Vehicle Dynamics; Butterworth-Heinemann: Oxford, UK, 2005. [Google Scholar]
- Amann, N.; Böcker, J.; Prenner, F. Active damping of drive train oscillations for an electrically driven vehicle. IEEE/ASME Trans. Mechatron. 2004, 9, 697–700. [Google Scholar] [CrossRef]
- Rodriguez, J.; Meneses, R.; Orus, J. Active vibration control for electric vehicle compliant drivetrains. In Proceedings of the 39th Annual Conference of the IEEE Industrial Electronics Society (IECON), Vienna, Austria, 10–13 November 2013. [Google Scholar]
- ISO. Mechanical vibration and shock—Evaluation of human exposure to whole-body vibration—Part 1: General Requirements; BS ISO 2631-1:1997; ISO: Geneva, Switzerland, 1997. [Google Scholar]
- ISO. Human Response to Vibration—Measuring Instrumentation— Part 1: General Purpose Vibration Meters; BS EN ISO 8041-1:2017; ISO: Geneva, Switzerland, 2017. [Google Scholar]
- Pennycott, A.; De Novellis, L.; Sabbatini, A.; Gruber, P.; Sorniotti, A. Reducing the motor power losses of a four-wheel drive, fully electric vehicle via wheel torque allocation. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 830–839. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electric Vehicle Layouts | Vehicle Mass (kg) | Motor Rotor Inertia (kgm2) | Transmission Mass (kg) | Inverter Mass (kg) | 1st Gear Ratio (−) | 2nd Gear Ratio (−) | Max. Wheel Torque * (Nm) |
|---|---|---|---|---|---|---|---|
| L1: single-speed 2WD | 820.6 | 0.0338 | 12.6 | 5 | 8.9 | − | 772 |
| L2: 2-speed 2WD | 831.5 | 0.0338 | 23.5 | 5 | 12.2 | 6.76 | 1060 |
| L3: single-speed 4WD | 848.2 | 0.0181 | 12.6 × 2 | 5 × 2 | 8.9 | − | 772 |
| L4: 2-speed 4WD | 870.0 | 0.0181 | 23.5 × 2 | 5 × 2 | 12.2 | 6.76 | 1060 |
| State | Front Transmission | Rear Transmission | State | Front Transmission | Rear Transmission |
|---|---|---|---|---|---|
| 1 | 1st gear | 1st gear | 5 | Neutral | 1st gear |
| 2 | 1st gear | 2nd gear | 6 | Neutral | 2nd gear |
| 3 | 2nd gear | 1st gear | 7 | 1st gear | Neutral |
| 4 | 2nd gear | 2nd gear | 8 | 2nd gear | Neutral |
| Layout | Anti-jerk Controller | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| (m/s1.75) | (m/s2) | (km/h) | (s) | (s) | (s) | (%) | (Nm) | ||
| L1: Single-speed 2WD | Off | 0.491 | 0.341 | 0 | 0.055 | 0.646 | 0.150 | 33.22 | 0 |
| On | 0.035 | 0.020 | −0.370 | 0.056 | 0.259 | 0.184 | 1.67 | 2.588 | |
| L2: 2-speed 2WD | Off | 0.329 | 0.279 | 0 | 0.096 | 0.789 | 0.505 | 16.29 | 0 |
| On | 0.056 | 0.039 | −0.423 | 0.081 | 0.258 | 0.132 | 3.08 | 3.752 | |
| L3: Single-speed 4WD | Off | 0.799 | 0.528 | − | 0.021 | NA | 0.048 | 69.65 | 0 |
| On | 0.238 | 0.120 | −0.232 | 0.023 | 0.252 | 0.037 | 16.54 | 1.675 | |
| L4: 2-speed 4WD | Off | 1.046 | 0.701 | − | 0.027 | NA | 0.062 | 68.90 | − |
| On | 0.219 | 0.120 | −0.372 | 0.032 | 0.180 | 0.058 | 12.45 | 2.044 |
| Vehicle | Top Speed (km/h) | Acc. Time 0–30 km/h (s) | Acc. Time 0–50 km/h (s) | Acc. Time 0–70 km/h (s) |
|---|---|---|---|---|
| L1: single-speed 2WD | 78.7 | 3.1 | 5.4 | 9.1 |
| L2: 2-speed 2WD | 103.2 | 2.7 | 6.0 | 9.6 |
| L3: single-speed 4WD | 78.7 | 3.1 | 5.5 | 9.3 |
| L4: 2-speed 4WD | 103.2 | 2.4 | 5.7 | 9.4 |
| Consumption | 30 km/h | 50 km/h | 70 km/h | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (Wh/km) | Normal | Optimal | Normal | Optimal | Normal | Optimal | ||||||
| L1: single-speed 2WD | 36.20 | − | 50.53 | − | 72.61 | − | ||||||
| L2: 2-speed 2WD | 37.41 | 3.3% | 37.18 | 2.7% | 51.56 | 2.0% | 50.92 | 0.8% | 73.23 | 0.9% | 73.23 | 0.9% |
| L3: single-speed 4WD | 37.16 | 2.7% | 37.16 | 2.7% | 51.56 | 2.0% | 51.47 | 1.9% | 73.71 | 1.5% | 70.70 | −2.6% |
| L4: 2-speed 4WD | 38.80 | 7.2% | 37.31 | 3.1% | 53.03 | 4.9% | 51.02 | 1.0% | 74.64 | 2.8% | 68.53 | −5.6% |
| Consumption | New European Drive Cycle (NEDC)— Urban Section (4 x ECE-15) | Japanese 10–15 Mode (J10–15) | ||||||
|---|---|---|---|---|---|---|---|---|
| (Wh) | Normal | Optimal | Normal | Optimal | ||||
| L1: single-speed 2WD | 240.1 | − | 418.2 | − | ||||
| L2: 2-speed 2WD | 220.4 | −8.2% | 219.1 | −8.7% | 393.4 | −5.9% | 394.3 | −5.7% |
| L3: single-speed 4WD | 223.2 | −7.0% | 216.5 | −9.8% | 402.5 | −3.8% | 380.4 | −9.0% |
| L4: 2-speed 4WD | 226.4 | −5.7% | 221.0 | −8.0% | 405.2 | −3.1% | 381.5 | −8.8% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Pinto, S.; Camocardi, P.; Chatzikomis, C.; Sorniotti, A.; Bottiglione, F.; Mantriota, G.; Perlo, P. On the Comparison of 2- and 4-Wheel-Drive Electric Vehicle Layouts with Central Motors and Single- and 2-Speed Transmission Systems. Energies 2020, 13, 3328. https://doi.org/10.3390/en13133328
De Pinto S, Camocardi P, Chatzikomis C, Sorniotti A, Bottiglione F, Mantriota G, Perlo P. On the Comparison of 2- and 4-Wheel-Drive Electric Vehicle Layouts with Central Motors and Single- and 2-Speed Transmission Systems. Energies. 2020; 13(13):3328. https://doi.org/10.3390/en13133328
Chicago/Turabian StyleDe Pinto, Stefano, Pablo Camocardi, Christoforos Chatzikomis, Aldo Sorniotti, Francesco Bottiglione, Giacomo Mantriota, and Pietro Perlo. 2020. "On the Comparison of 2- and 4-Wheel-Drive Electric Vehicle Layouts with Central Motors and Single- and 2-Speed Transmission Systems" Energies 13, no. 13: 3328. https://doi.org/10.3390/en13133328
APA StyleDe Pinto, S., Camocardi, P., Chatzikomis, C., Sorniotti, A., Bottiglione, F., Mantriota, G., & Perlo, P. (2020). On the Comparison of 2- and 4-Wheel-Drive Electric Vehicle Layouts with Central Motors and Single- and 2-Speed Transmission Systems. Energies, 13(13), 3328. https://doi.org/10.3390/en13133328