Indirect Vector-Controlled Brushless Doubly-Fed Twin-Stator Induction Generator for Wind Energy Conversion Application †

Abstract
1. Introduction
2. System Under Investigation
2.1. Wind Turbine Model
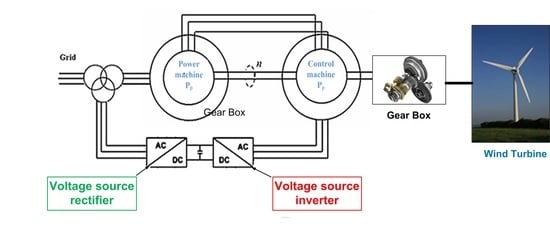
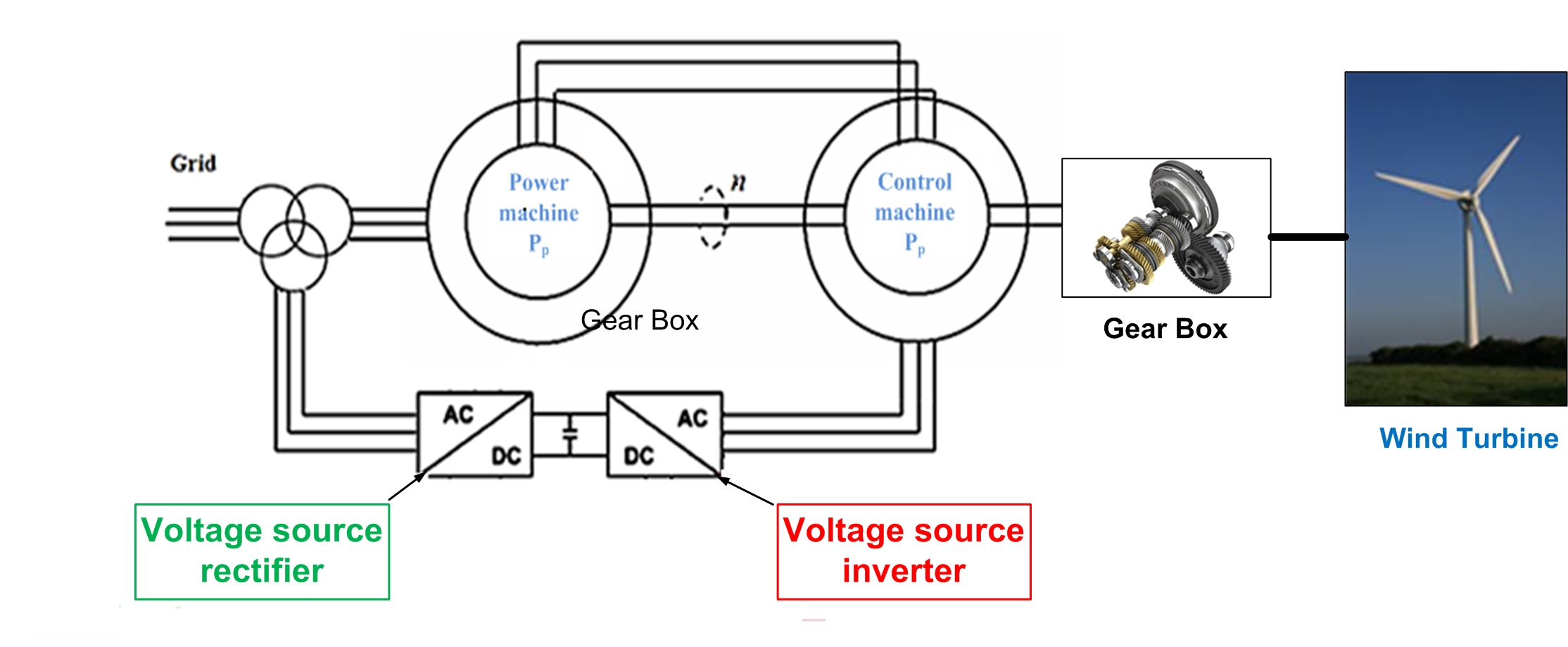
2.2. Brushless Doubly-Fed Twin-Stator Induction Generator (BDFTSIG) Model
2.2.1. Voltage Equations
2.2.2. Flux Equations
2.2.3. Torque Equation
2.2.4. Dynamic Equations
- stand for the stationary reference frame attached to the power machine stator
- is the synchronous reference frame rotating with speed . The transformation angle for the stator quantities is the synchronous angle, which for a ‘stiff’ grid always rotates at a constant speed.
- is the d-q reference frame attached to the rotor. This stationary frame, however, is rotating with respect to the stator stationary reference frame at an angular speed of .
3. Proposed Indirect Vector Control
- Voltage source pulse width modulated (PWM) rectifier acting as boost converter
- Voltage source PWM inverter used to adjust the control machine of the BDFTSIG.
3.1. Grid Side Converter Control
3.2. Machine Side Converter Control System
4. Simulation Results
- The complete modelling of the BDFTIG with bi-directional converter;
- The controllers for the BDFTIG;
- The aerodynamic model of the wind turbine.
4.1. Turbine Aeromechanical Model Simulation
4.2. Voltage Source Rectifier (VSR) Control Simulation
- Perform the function of the boost-rectifier;
- Maintain constant DC-link voltage;
- Exchange the energy between the grid and the DC-link regardless of the load connected to the VSI side (the control machine in our system).
4.3. Voltage Source Inverter (VSI) Control Simulation
- (a)
- Variable wind speed and consequently the turbine speed command signal will be variable to obtain the maximum power extraction at the corresponding varying wind speed, while the reactive power command signal remains constant at 0 VAr to achieve a unity power factor operation.
- (b)
- Constant wind speed and hence the turbine speed command signal will be kept constant at the value that achieves maximum power extraction at this wind speed, while the reactive power command signal varies from −500 VAr (leading p.f), to 0 VAr (unity p.f) to 500 VAr (lagging p.f). This investigation shows the degree of independence between the speed, which is in direct proportion with the active power flow, and the reactive power flow in the BDFTIG.
- First case: Variable speed command at constant reactive power reference:
- ⮚
- Sub-synchronous speed: The initial per unit rotor speed p.u with wind speed input = 9.6 m/s.
- ⮚
- Super-synchronous: The initial per unit rotor speed p.u with wind speed input = 10.8 m/s.
- Second case: Constant speed command at variable reactive power reference:
5. Experimental Verification
- Two identical 1.5 kW wound rotor induction machines forming the BDFTIG induction machine. These were mechanically coupled in the back to back topology, while their rotors were interconnected without any phase inversion between them.
- The wind turbine itself was emulated using another induction machine equipped with a commercial alternating current (AC) drive to imitate wind speed variation.
- The bidirectional power converter with the controller controlled by a Digital Signal Processor (DSP) controller based on Texas Instruments’ F28335 Delfino DSP board.
- The voltages and currents of each stator phase are measured by LEM LV25-p and LEM LA 55-p transducers, respectively.
- In order to get the value of the angle required for the abc-dq transformation in the controller, a digital photo tachometer (MODEL HPT-100A) was used and a special signal conditioning circuit was designed to provide the data required for the mechanical speed and angle () calculation.
5.1. Control Implementation
- First, the grid side converter was energized and operates in the uncontrolled rectifier mode under no-load conditions.
- Second, the VSR is activated and it boosts the DC voltage to the required level (in our case the DC voltage is kept at 100 V).
- Third, the VSI was turned on and left in the idle mode, effectively producing a short circuit at the control machine windings.
- Fourth, with stabilization of the DC voltage, the power machine stator windings are energized, bringing the BDFTIG to its synchronous speed.
- When the generator reached steady state operation the VSI controller became fully engaged driving the BDFTIG to whatever the reference speed was set to be. The reference speed was limited to 25% of the synchronous speed to allow for a safe operation of the BDFTIG.
- The turn off sequence for the converter was the opposite of the start-up procedure, allowing for gradual disconnection of the machine and the converter.
5.2. Grid-Side Converter (GSC) Experimental Results
5.3. Machine-Side Converter (MSC) Experimental Results
- (a)
- The desired turbine speed, which is directly related to the active power produced by the BDFTIG generated from the power signal feedback (PSF) MPPT technique.
- (b)
- The required reactive power for the generator to maintain an appropriate power quality to the grid.
6. Results Discussion
6.1. Grid-Side Converter Results
6.2. Machine-Side Converter Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| kinetic power of air stream | |
| Air Density | |
| Wind Linear Velocity | |
| Tip Speed Ratio (TSR) | |
| Turbine Blade Swept Area | |
| The mechanical power | |
| performance coefficient of turbine blades | |
| Blade Pitch Angles | |
| Wind Turbine blade radius | |
| rotor speed | |
| Cut-in wind velocity of the turbine | |
| Nominal wind velocity of the turbine | |
| Characteristic constants for each wind turbine. | |
| Angular speed for power machine, (r/s) | |
| Rotor frequency, (r/s) | |
| Shaft mechanical speed, (r/s) | |
| Angular speed for control machine, (r/s) | |
| Grid frequency | |
| Pole Pairs for Power and Control machines | |
| Rotor current of the power machine | |
| Rotor current of the control machine | |
| Rotor voltage of the power machine | |
| Rotor voltage of the control machine | |
| slip | |
| Stator leakage inductance of the power and control machine | |
| Mutual inductance of the power and control machine | |
| Rotor-inductance of the power and control machine | |
| power machine stator flux | |
| rotor flux | |
| control machine stator flux | |
| Stator current of the power machine | |
| Stator current of the control machine | |
| Rotor current of the power and control machine | |
| Moment of inertia of the power machine | |
| Friction coefficient of the power machine | |
| Electromagnetic torque of the BDFTIG machine | |
| Moment of inertia of the control machine | |
| Friction coefficient of the control machine | |
| Load torque | |
| Stator voltage of the power machine | |
| Stator voltage of the control machine | |
| q-axis stator voltage of the power machine | |
| d-axis stator voltage of the power machine | |
| q-axis rotor voltage of the power machine | |
| d-axis rotor voltage of the power machine | |
| q-axis stator current of the power machine | |
| d-axis stator current of the power machine | |
| q-axis rotor current of the power machine | |
| d-axis rotor current of the power machine | |
| q-axis stator voltage of the control machine | |
| d-axis stator voltage of the control machine | |
| q-axis rotor voltage of the control machine | |
| d-axis rotor voltage of the control machine | |
| q-axis stator current of the control machine | |
| d-axis stator current of the control machine | |
| q-axis rotor current of the control machine | |
| d-axis rotor current of the control machine | |
| Generator phase voltage | |
| Bridge converter voltage controllable according to the demanded DC voltage level | |
| Load current | |
| Line current | |
| Converter DC output current | |
| Converter DC output controlled voltage | |
| Grid voltage phase-angle | |
| instantaneous three, phase-to-neutral grid voltages | |
| Rectifier d-axis voltage | |
| Rectifier q-axis voltage | |
| Rectifier d-axis current | |
| Rectifier q-axis current | |
| Active Power of the Power Machine | |
| Reactive Power of the Power Machine | |
| q-axis stator flux of the power machine | |
| d-axis stator flux of the power machine | |
| q-axis rotor flux of the power machine | |
| d-axis rotor flux of the power machine | |
| q-axis stator flux of the control machine | |
| d-axis stator flux of the control machine | |
| q-axis rotor flux of the control machine | |
| d-axis rotor flux of the control machine | |
| Power Machine angular position | |
| Control Machine angular position |
Appendix A
Appendix A.1. BDFTSIG Experimental Realisation


Appendix A.2. Parameter Sensitivity Analysis
Appendix A.2.1. GSC Controller Parameter Sensitivity Analysis



Appendix A.2.2. MSC Controller Parameter Sensitivity



References
- European Wind Energy Association. Available online: http://www.ewea.org/ (accessed on 25 July 2020).
- Ledesma, P.; Usaola, J. Doubly Fed Induction Generator Model for Transient Stability Analysis. IEEE Trans. Energy Convers. 2005, 20, 388–397. [Google Scholar] [CrossRef]
- Lei, Y.; Mullane, A.; Lightbody, G.; Yacamini, R. Modeling of the Wind Turbine with a Doubly Fed Induction Generator for Grid Integration Studies. IEEE Trans. Energy Convers. 2006, 21, 257–264. [Google Scholar] [CrossRef]
- Hansen, A.D.; Hansen, L.H. Wind Turbine Concept Market Penetration over 10 Years (1995–2004). Wind Energy 2007, 10, 81–97. [Google Scholar] [CrossRef]
- Zhou, D.; Blaabjerg, F.; Lau, M.; Tonnes, M. Optimized Reactive Power Flow of DFIG Power Converters for Better Reliability Performance Considering Grid Codes. IEEE Trans. Ind. Electron. 2014, 62, 1552–1562. [Google Scholar] [CrossRef]
- Pena, R.; Clare, J.; Asher, G. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEE Proc. Electr. Power Appl. 1996, 143, 231. [Google Scholar] [CrossRef]
- Rüncos, F.; Carlson, R.; Oliveira, A.M.; Kuo-Peng, P.; Sadowski, N. Performance Analysis of a Brushless Double Fed Cage Induction Generator. In Proceedings of the Nordic Wind Power Conference, Göteborg, Sweden, 1–2 March 2004. [Google Scholar]
- Protsenko, K.; Xu, D. Modeling and Control of Brushless Doubly-Fed Induction Generators in Wind Energy Applications. In Proceedings of the APEC 07–Twenty-Second Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 25 February–1 March 2007; pp. 529–535. [Google Scholar]
- Voltolini, H.; Carlson, R. Grid synchronization and maximum power point tracking for wind energy generation system with Brushless Doubly Fed Induction Generator. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 2173–2177. [Google Scholar]
- Shao, S.; Abdi, E.; Barati, F.; McMahon, R. Stator-Flux-Oriented Vector Control for Brushless Doubly Fed Induction Generator. IEEE Trans. Ind. Electron. 2009, 56, 4220–4228. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Z.; Hu, J.; Xu, W.; Zhu, J. A cascaded brushless doubly fed induction generator for wind energy applications based on direct power control. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–6. [Google Scholar]
- Williamson, S.; Ferreira, A.C.; Wallace, A.K. Generalized theory of brushless doubly-fed machine. Part 1: Analysis. IEE Proc. Elect. Power Appl. 1997, 144, 111–122. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, J.; Dorrell, D.G. A New Control Method of Cascaded Brushless Doubly Fed Induction Generators Using Direct Power Control. IEEE Trans. Energy Convers. 2014, 29, 771–779. [Google Scholar] [CrossRef]
- Ademi, S.; Jovanović, M.; Hasan, M. Control of Brushless Doubly-Fed Reluctance Generators for Wind Energy Conversion Systems. IEEE Trans. Energy Convers. 2015, 30, 596–604. [Google Scholar] [CrossRef]
- Sadeghi, R.; Madani, S.M.M.; Ataei, M. A New Smooth Synchronization of Brushless Doubly-Fed Induction Generator by Applying a Proposed Machine Model. IEEE Trans. Sustain. Energy 2017, 9, 371–380. [Google Scholar] [CrossRef]
- Sadeghi, R.; Madani, S.M.; Ataei, M.; Kashkooli, M.R.A.; Ademi, S. Super-Twisting Sliding Mode Direct Power Control of a Brushless Doubly Fed Induction Generator. IEEE Trans. Ind. Electron. 2018, 65, 9147–9156. [Google Scholar] [CrossRef]
- Yang, J.; Tang, W.; Zhang, G.; Sun, Y.; Ademi, S.; Blaabjerg, F.; Zhu, Q. Sensorless Control of Brushless Doubly Fed Induction Machine Using a Control Winding Current MRAS Observer. IEEE Trans. Ind. Electron. 2019, 66, 728–738. [Google Scholar] [CrossRef]
- Wei, X.; Cheng, M.; Zhu, J.; Yang, H.; Luo, R. Finite-Set Model Predictive Power Control of Brushless Doubly Fed Twin Stator Induction Generator. IEEE Trans. Power Electron. 2018, 34, 2300–2311. [Google Scholar] [CrossRef]
- Zhang, F.; Zhu, L.; Jin, S.; Su, X.; Ademi, S.; Cao, W. Controller Strategy for Open-Winding Brushless Doubly Fed Wind Power Generator with Common Mode Voltage Elimination. IEEE Trans. Ind. Electron. 2018, 66, 1098–1107. [Google Scholar] [CrossRef]
- Wei, X.; Fang, C.; Liu, J.; Liu, S.; Cheng, M. Model Predictive Power Control of Brushless Doubly Fed Twin Stator Induction Generator for Grid Synchronization and Power Generation. In Proceedings of the 8th Renewable Power Generation Conference (RPG 2019), Shanghai, China, 24–25 October 2019; pp. 1–7. [Google Scholar]
- Xu, W.; Ebraheem, A.K.; Liu, Y.; Zhu, J.; Hussien, M.G.; Elbabo Mohammed, O.M. An MRAS Speed Observer Based on Control Winding Flux for Sensorless Control of Stand-Alone BDFIGs. IEEE Trans. Power Electron. 2020, 35, 7271–7281. [Google Scholar] [CrossRef]
- Dauksha, G.; Iwanski, G. Indirect Torque Control of a Cascaded Brushless Doubly-Fed Induction Generator Operating with Unbalanced Power Grid. IEEE Trans. Energy Convers. 2020, 35, 1065–1077. [Google Scholar] [CrossRef]
- Barati, F.; McMahon, R.; Shao, S.; Abdi, E.; Oraee, H. Generalized Vector Control for Brushless Doubly Fed Machines with Nested-Loop Rotor. IEEE Trans. Ind. Electron. 2012, 60, 2477–2485. [Google Scholar] [CrossRef]
- Abdulla, M.A.M. New system for power transfer between two asynchronous grids using twin stator induction machine. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; Volume 1, pp. 1658–1663. [Google Scholar] [CrossRef]
- Abdelkader, M.I.; Abdelsalam, A.K.; Hossam, A.A. Asynchronous grid interconnection using brushless Doubly Fed Induction Machines: Assessment on various configurations. In Proceedings of the 2014 16th International Power Electronics and Motion Control Conference and Exposition, Antalya, Turkey, 21–24 September 2014; pp. 406–412. [Google Scholar]
- Gowaid, I.A.; Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S. Ride-Through Capability of Grid-Connected Brushless Cascade DFIG Wind Turbines in Faulty Grid Conditions—A Comparative Study. IEEE Trans. Sustain. Energy 2013, 4, 1002–1015. [Google Scholar] [CrossRef]
- Wang, X.; McMahon, R.A.; Tavner, P.J. Design of the Brushless Doubly-Fed (Induction) Machine. In Proceedings of the 2007 IEEE International Electric Machines & Drives Conference, Antalya, Turkey, 3–5 May 2007; Volume 2, pp. 1508–1513. [Google Scholar] [CrossRef]
- Protsenko, K.; Xu, D. Modeling and Control of Brushless Doubly-Fed Induction Generators in Wind Energy Applications. IEEE Trans. Power Electron. 2008, 23, 1191–1197. [Google Scholar] [CrossRef]
- Gevaert, L.F.M.; De Kooning, J.D.M.; VanDoorn, T.L.; Van De Vyver, J.; Vandevelde, L. Evaluation of the MPPT performance in small wind turbines by estimating the tip-speed ratio. In Proceedings of the 2013 48th International Universities’ Power Engineering Conference (UPEC), Dublin, Ireland, 2–5 September 2013; Volume 1, pp. 1–5. [Google Scholar] [CrossRef]
- Boukettaya, G.; Naifar, O.; Ouali, A. A vector control of a cascaded doubly fed induction generator for a wind energy conversion system. In Proceedings of the 2014 IEEE 11th International Multi-Conference on Systems, Signals & Devices (SSD14), Barcelona, Spain, 11–14 February 2014; pp. 1–7. [Google Scholar]
- Heier, S. Grid Integration of Wind Energy Conversion Systems; Wiley: Hoboken, NJ, USA, 1998. [Google Scholar]
- Basic, D.; Zhu, J.; Boardman, G. Transient performance study of a brushless doubly fed twin stator induction generator. IEEE Trans. Energy Convers. 2003, 18, 400–408. [Google Scholar] [CrossRef]
- Akagi, H.; Fujita, H. A new power line conditioner for harmonic compensation in power systems. IEEE Trans. Power Deliv. 1995, 10, 1570–1575. [Google Scholar] [CrossRef]
- Singh, B.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D.P. A review of single-phase improved power quality ac~dc converters. IEEE Trans. Ind. Electron. 2003, 50, 962–981. [Google Scholar] [CrossRef]
- Rodríguez, J.; Dixon, J.; Espinosa, J.R.; Pontt, J.; Lezana, P. PWM regenerative rectifiers: State of the art. IEEE Trans. Ind. Electron. 2005, 52, 5–22. [Google Scholar] [CrossRef]
- Abdelkader, M.I.; Abdelsalam, A.K.; Eldin, A.A.H. Vector controlled brushless doubly fed twin stator cascaded induction generator for variable speed wind generation connected to weak grids. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–12. [Google Scholar]
- Xia, Y.; Ahmed, K.H.; Williams, B.W. A New Maximum Power Point Tracking Technique for Permanent Magnet Synchronous Generator Based Wind Energy Conversion System. IEEE Trans. Power Electron. 2011, 26, 3609–3620. [Google Scholar] [CrossRef]
- Wei, X.; Cheng, M.; Wang, W.; Han, P.; Luo, R. Direct Voltage Control of Dual-Stator Brushless Doubly Fed Induction Generator for Stand-Alone Wind Energy Conversion Systems. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Tohidi, S. Analysis and simplified modelling of brushless doubly-fed induction machine in synchronous mode of operation. IET Electr. Power Appl. 2016, 10, 110–116. [Google Scholar] [CrossRef]
- Han, P.; Cheng, M.; Wei, X.; Li, N. Modeling and Performance Analysis of a Dual-Stator Brushless Doubly-Fed Induction Machine Based on Spiral Vector Theory. IEEE Trans. Ind. Appl. 2015, 52, 1380–1389. [Google Scholar] [CrossRef]
- Strous, T.D.; Wang, X.; Polinder, H.; Ferreira, J.A. Evaluating Harmonic Distortions in Brushless Doubly Fed Induction Machines. IEEE Trans. Magn. 2016, 53, 1–10. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Machine Type | Paper Contribution | Converter Type | Proportional Integral (PI) Control Loops | Exp. Result | Merits | Limitations |
|---|---|---|---|---|---|---|---|
| [7] | BDFTSIG | Vector control based on the orientation on the power machine stator lux. | Current regulated pulse width (CRPWM) with hysteresis controllers | 2 | Y | Good steady-state current harmonic spectra | Not robust to machine parameters variations |
| [8] | BDFTSIG | Field-oriented control (FOC) for flexible power flow control | Voltage source converter (VSC) with SPWM | 3 | Y | Separate control of active and reactive power | Use of flux estimators and compensation block. |
| [9] | BDFIG with nested loop or wound rotor | vector control using a rotating reference frame fixed on the PW flux and proposed synchronization process | VSC with Space vector pulse width modulation (SVPWM) | 6 | N | Synchronization controller is implemented for soft connection with the grid | Sophisticated controller and not robust to machine parameters variations |
| [10] | BDFIG with a nested loop rotor | A simplified controller oriented with the PW stator flux | VSI with (SPWM) | 2 | Y | Simplified controller with stable operation and satisfactory dynamic responses. | Use of flux estimators and compensation block. |
| [11] | BDFTSIG | Direct power control (DPC) strategy | VSC with hysteresis controller | - | N | Excellent dynamic response and steady state performance | Active and reactive power ripples and current distortions |
| [12] | BDFIM with nested-loop type rotor | The vector control and synchronization to the grid | 3-Phase, 2-level VSI with hysteresis controller | - | Y | BDFM performance optimizations or reactive power regulation | Complicated controller |
| [13] | BDFTSIG | DPC | VSI with hysteresis controller | - | Y | Control system is simpler and tuning effort is not needed. | Active/reactive power ripples and current distortions |
| [14] | BDFRG | Voltage and flux vector oriented control of a (BDFRG) technology | VSI with space vector PWM | 4 | Y | Similarity at variable speeds/loads of parameter-free VC and FOC | Reactive power response distortion |
| [15] | BDFTSIG | An improved direct torque control (DTC) | VSI with hysteresis controller | - | Y | No PLL, PI controllers and measurements of rotor position/speed and faster grid synchronization with no inrush current. | Complicated equivalent circuit |
| [16] | BDFIG with nested-loop/wound rotor | Super-twisting sliding mode direct power control (SSM-DPC) | VSI with SVPWM | 1 | Y |
| High transient response |
| [17] | BDFIG with nested-loop/wound rotor | A model reference adaptive system (MRAS) observer to realize sensorless control | VSI with SPWM | 2 | Y | good steady-state and dynamic performance. | Sophisticated controller implementation |
| [18] | BDFTSIG | Finite-set model predictive power control (FS-MPPC) in variable speed constant frequency (VSCF) generation applications. | VSI getting the switching states from a cost optimization function | - | Y |
| Sophisticated controller implementation |
| [19] | OW-BDFRG | Direct power control (DPC) | dual controllable two-level three-phase converters with SVPWM and hysteresis controller | - | Y | The main circuit structure is simpler and easier to control. | Complicated hardware implementation. |
| [20] | BDFIG with nested-loop/wound rotor | A model predictive virtual power control (MPVPC). | VSI getting the switching states from a cost optimization function | - | Y | MPVPC controller can achieve fast and smooth grid synchronization, and excellent decoupled control of active power and reactive power. | Sophisticated controller implementation |
| [21] | BDFIM with wound rotor type | Rotor speed observer for sensorless control with model reference adaptive system (MRAS) structure. | VSC with SVPWM | 3 | Y | Maintain effectively amplitude and frequency of power winding voltage constant | Sophisticated controller implementation |
| [22] | BDFTSIG | An indirect torque control algorithm for a BDFTSIG | VSI with SPWM | - | N | Reduction of electromagnetic torque oscillations, full or partial active power oscillations reduction | Constant torque target still provide some torque oscillations. |
| Machine Parameters | ||
|---|---|---|
| Parameters | Cascade IM | |
| PM | CM | |
| 1.82 | 1.82 | |
| 2.14 | 2.14 | |
| 6.6 | 6.6 | |
| 15.23 | 15.23 | |
| 188.5 | 188.5 | |
| Poles | 6 | 4 |
| 4 | 4 | |
| Generator Voltage (V) | 220 | 220 |
| Rectifier Parameters | ||
| DC−link capacitor | 470 | |
| Rectifier inductance | 5 | |
| DC link voltage (V) | 500 | |
| Wind Turbine Parameters | ||
| Turbine nominal Mechanical output power (W) | 4500 | |
| Rated wind speed (m/s) | 12 | |
| Rated output mechanical power at rated wind speed (pu of nominal mech. power) | 0.73 | |
| Mechanical rotational speed at rated wind speed (pu of the rated generator speed) | 1.2 | |
| Blade pitch angle, (deg) | 0 | |
| Grid parameters | ||
| Grid voltage (V) | 220 | |
| Grid frequency (Hz) | 50 | |
| Grid resistance (Ω) | 0.01 | |
| Grid inductance (mH) | 0.34 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelkader, M.I.; Abdelsalam, A.K.; Hossameldin, A.A. Indirect Vector-Controlled Brushless Doubly-Fed Twin-Stator Induction Generator for Wind Energy Conversion Application. Energies 2020, 13, 4174. https://doi.org/10.3390/en13164174
Abdelkader MI, Abdelsalam AK, Hossameldin AA. Indirect Vector-Controlled Brushless Doubly-Fed Twin-Stator Induction Generator for Wind Energy Conversion Application. Energies. 2020; 13(16):4174. https://doi.org/10.3390/en13164174
Chicago/Turabian StyleAbdelkader, Mona I., Ahmed K. Abdelsalam, and Ahmed A. Hossameldin. 2020. "Indirect Vector-Controlled Brushless Doubly-Fed Twin-Stator Induction Generator for Wind Energy Conversion Application" Energies 13, no. 16: 4174. https://doi.org/10.3390/en13164174
APA StyleAbdelkader, M. I., Abdelsalam, A. K., & Hossameldin, A. A. (2020). Indirect Vector-Controlled Brushless Doubly-Fed Twin-Stator Induction Generator for Wind Energy Conversion Application. Energies, 13(16), 4174. https://doi.org/10.3390/en13164174