Transient Flow Characteristic of High-Pressure Hydrogen Gas in Check Valve during the Opening Process


Abstract
:
1. Introduction
2. D Model of the Check Valve and the Governing Equations
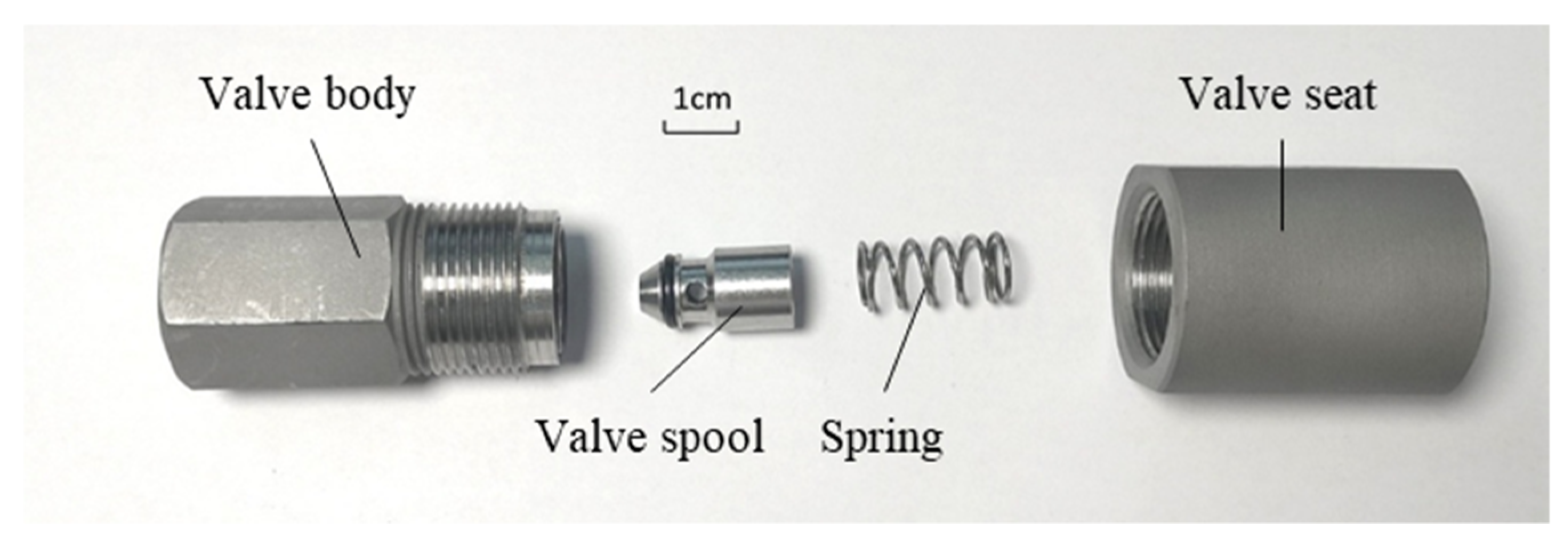
2.1. D Model of the Check Valve
2.2. Governing Equations for Transient Hydrogen Gas Flow
2.3. Movement Equations for the Valve Spool
3. CFD Model and Transient-Flow Model of the Check Valve
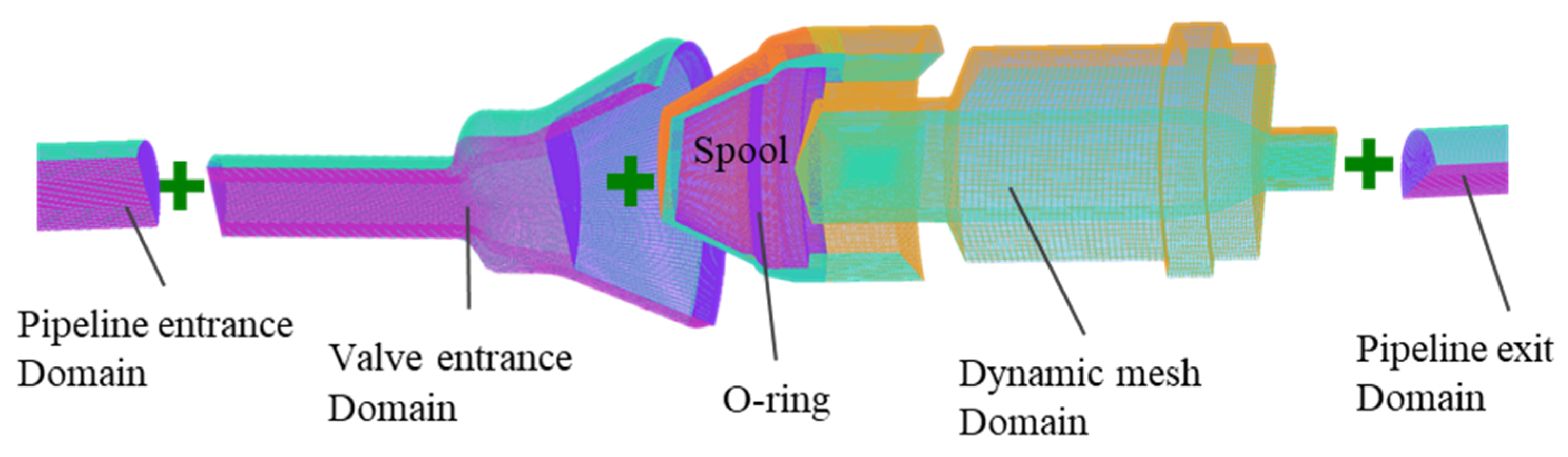
3.1. Domain Decomposition and Dynamic Mesh Generation
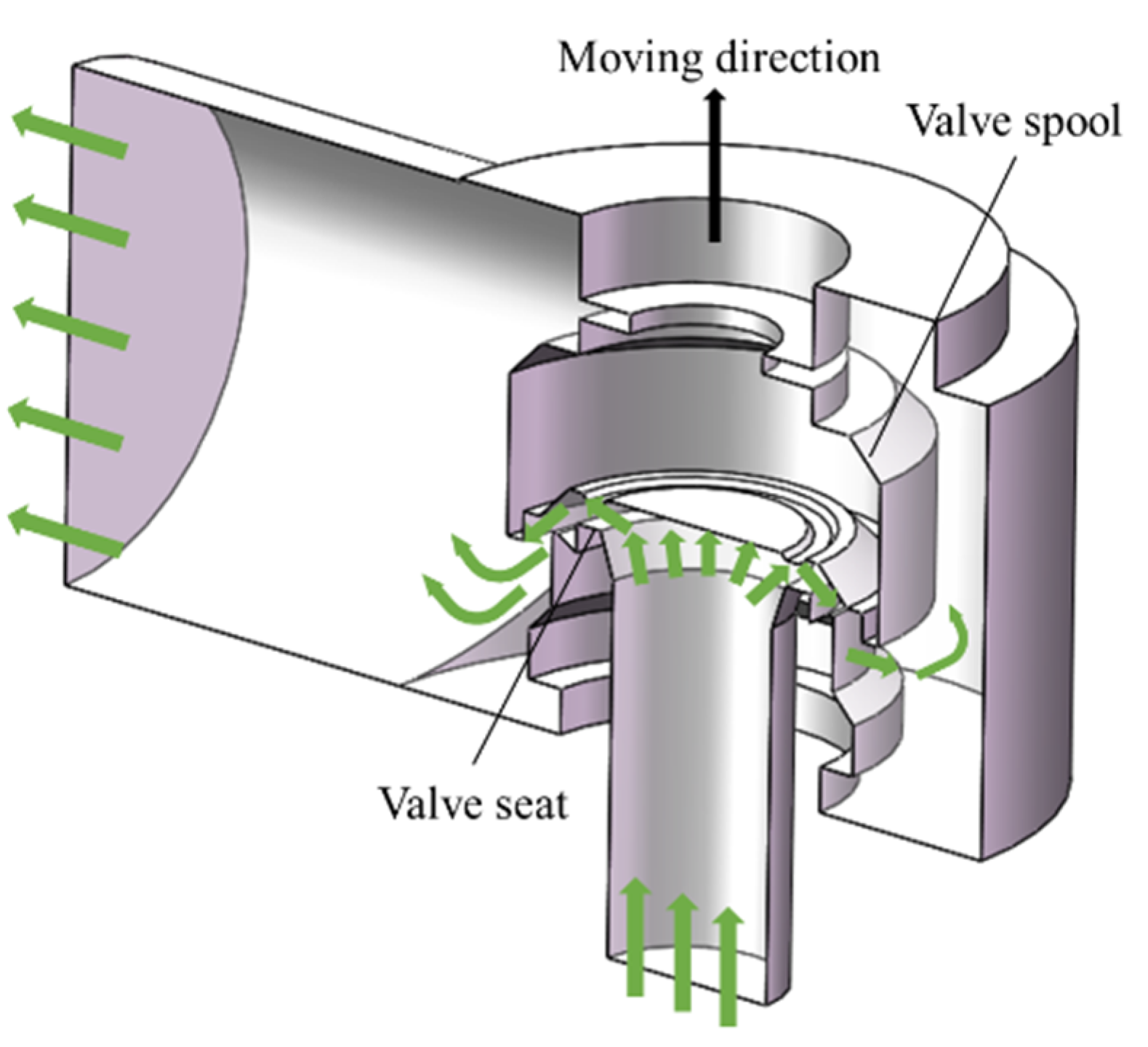
3.2. Moving Mesh Boundary Method of the CFD Model
3.3. Verification of the Transient CFD Model
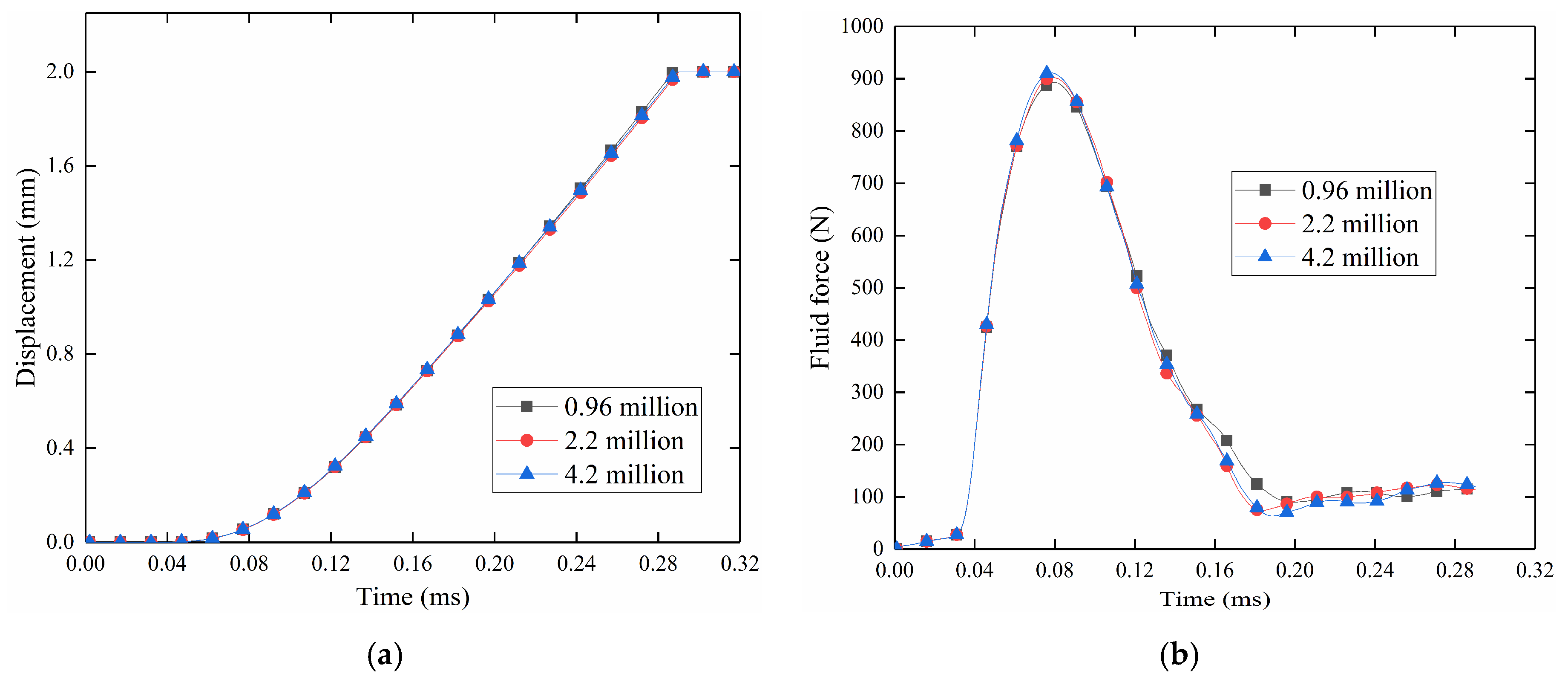
3.4. Effect of the Mesh Density on the Validity of the CFD Results
4. Detailed Parameters for the Investigated Cases
5. Results and Discussions
5.1. Transient-Flow Characteristics of High-Pressure Hydrogen Gas During the Opening Process
5.2. Effect of Inlet Pressure on the Movement Characteristic of the Valve Spool
6. Conclusions
- (1)
- The time for the valve spool to reach maximum displacement was very short during the opening process, at about minor second (ms) level. The high-pressure hydrogen gas quickly generates a maximum pressure at the valve spool, as well as a maximum acceleration of 105 m/s2 level. The maximum hydrogen fluid force was about 103 N level, and the resistance force from the spring was negligible compared to the fluid force.
- (2)
- The inlet hydrogen pressure had a very significant effect on the opening behavior of the valve spool. When the inlet pressure increased, the fluid force increased, the acceleration of the valve spool also increased; the time needed for the valve spool to reach the limiter decreased; and the velocity of the valve spool increased; whereas the time of the maximum fluid force was constant. Obviously, the higher inlet pressure generated a higher impact between the valve spool and the valve limiter.
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Z.; Kendall, K.; Yan, X. China progress on renewable energy vehicles: Fuel cells, Hydrogen and Battery hybrid vehicles. Energies 2019, 12, 54. [Google Scholar] [CrossRef] [Green Version]
- Kharel, S.; Shabani, B. Hydrogen as a Long-term Large-scale energy storage solution to support renewables. Energies 2018, 11, 2825. [Google Scholar] [CrossRef] [Green Version]
- Abdalla, A.M.; Hossain, S.; Nisfindy, O.B.; Azad, A.T.; Dawood, M.; Azad, A.K. Hydrogen production, storage, transportation and key challenges with applications: A review. Energy Convers. Manag. 2018, 165, 602–627. [Google Scholar] [CrossRef]
- Moradi, R.; Groth, K.M. Hydrogen storage and delivery: Review of the state of the art technologies and risk and reliability analysis. Int. J. Hydrogen Energy 2019, 44, 12254–12269. [Google Scholar] [CrossRef]
- Cerniauskas, S.; Grube, T.; Praktiknjo, A.; Stolten, D.; Robinius, M. Future Hydrogen Markets for Transportation and Industry: The Impact of CO2 Taxes. Energies 2019, 12, 4707. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Liu, X.; Xu, P.; Liu, P.; Zhao, Y.; Yang, J. Development of high pressure gaseous hydrogen storage technologies. Int. J. Hydrogen Energy 2012, 37, 1048–1057. [Google Scholar] [CrossRef]
- Kim, Y.; Shin, D.; Kim, C. On-Board Cold Thermal Energy Storage System for Hydrogen Fueling Process. Energies 2019, 12, 561. [Google Scholar] [CrossRef] [Green Version]
- Apostolou, D.; Xydis, G. A literature review on hydrogen refuelling stations and infrastructure. Current status and future prospects. Renew. Sustain. Energy Rev. 2019, 113, 109292. [Google Scholar] [CrossRef]
- Muratori, M.; Bush, B.; Hunter, C.; Melaina, M. Modeling Hydrogen Refueling Infrastructure to Support Passenger Vehicles. Energies 2018, 11, 1171. [Google Scholar] [CrossRef] [Green Version]
- Lowesmith, B.J.; Hankinson, G.; Chynoweth, S. Safety issues of the liquefaction, storage and transportation of liquid hydrogen: An analysis of incidents and HAZIDS. Int. J. Hydrogen Energy 2014, 39, 20516–20521. [Google Scholar] [CrossRef]
- Pagliaro, M.; Iulianelli, A. Hydrogen Refueling Stations: Safety and Sustainability. Gen. Chem. 2019, 6, 190029. [Google Scholar] [CrossRef]
- Sakamoto, J.; Sato, R.; Nakayama, J.; Kasai, N.; Shibutani, T.; Miyake, A. Leakage-type-based analysis of accidents involving hydrogen fueling stations in Japan and USA. Int. J. Hydrogen Energy 2016, 41, 21564–21570. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Yu, S. Numerical and experimental research of flow and sound fields in an axial-flow check valve and its optimization. Adv. Mech. Eng. 2015, 7, 2071731070. [Google Scholar] [CrossRef] [Green Version]
- Darby, R.; Aldeeb, A.A. The dynamic response of pressure relief valves in vapor or gas service. Part III: Model validation. J. Loss Prev. Process Ind. 2014, 31, 133–141. [Google Scholar] [CrossRef]
- Filo, G.; Lisowski, E.; Rajda, J. Flow analysis of a switching valve with innovative poppet head geometry by means of CFD method. Flow Meas. Instrum. 2019, 70, 101643. [Google Scholar] [CrossRef]
- Zhang, Z.; Jia, L.; Yang, L. Numerical simulation study on the opening process of the atmospheric relief valve. Nucl. Eng. Des. 2019, 351, 106–115. [Google Scholar] [CrossRef]
- Sibilla, S.; Gallati, M. Hydrodynamic Characterization of a Nozzle Check Valve by Numerical Simulation. J. Fluids Eng. 2008, 130, 121101. [Google Scholar] [CrossRef]
- Saha, B.K.; Chattopadhyay, H.; Mandal, P.B.; Gangopadhyay, T. Dynamic simulation of a pressure regulating and shut-off valve. Comput. Fluids 2014, 101, 233–240. [Google Scholar] [CrossRef]
- Song, X.; Cui, L.; Cao, M.; Cao, W.; Park, Y.; Dempster, W.M. A CFD analysis of the dynamics of a direct-operated safety relief valve mounted on a pressure vessel. Energy Convers. Manag. 2014, 81, 407–419. [Google Scholar] [CrossRef] [Green Version]
- Song, X.G.; Wang, L.T.; Park, Y.C.; Sun, W. A Fluid-structure Interaction Analysis of the Spring-Loaded Pressure Safety Valve during Popping Off. Proced. Eng. 2015, 130, 87–94. [Google Scholar] [CrossRef] [Green Version]
- Mamedov, B.A.; Somuncu, E.; Askerov, I.M. Evaluation of Speed of Sound and Specific Heat Capacities of Real Gases. J. Thermophys. Heat Transf. 2018, 32, 984–998. [Google Scholar] [CrossRef]
- Zheng, J.; Zhang, X.; Xu, P.; Gu, C.; Wu, B.; Hou, Y. Standardized equation for hydrogen gas compressibility factor for fuel consumption applications. Int. J. Hydrogen Energy 2016, 41, 6610–6617. [Google Scholar] [CrossRef]
- Johnson, T.; Bozinoski, R.; Ye, J.; Sartor, G.; Zheng, J.; Yang, J. Thermal model development and validation for rapid filling of high pressure hydrogen tanks. Int. J. Hydrogen Energy 2015, 40, 9803–9814. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, V.; Vu, D.; Park, W.; Jung, C. Navier-Stokes solver for water entry bodies with moving Chimera grid method in 6DOF motions. Comput. Fluids 2016, 140, 19–38. [Google Scholar] [CrossRef]
- Zheng, J.; Ye, J.; Yang, J.; Tang, P.; Zhao, L.; Kern, M. An optimized control method for a high utilization ratio and fast filling speed in hydrogen refueling stations. Int. J. Hydrogen Energy 2010, 35, 3011–3017. [Google Scholar] [CrossRef]
- Guo, J.; Xing, L.; Hua, Z.; Gu, C.; Zheng, J. Optimization of compressed hydrogen gas cycling test system based on multi-stage storage and self-pressurized method. Int. J. Hydrogen Energy 2016, 41, 16306–16315. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Inlet Pressure Pinlet (MPa) | Outlet Pressure Poutlet (MPa) | Spring Stiffness Coefficient (N/m) |
|---|---|---|---|
| 1 | 5 | 2 | 1000 |
| 2 | 7 | 2 | 1000 |
| 3 | 10 | 2 | 1000 |
| 4 | 20 | 2 | 1000 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, J.; Zhao, Z.; Zheng, J.; Salem, S.; Yu, J.; Cui, J.; Jiao, X. Transient Flow Characteristic of High-Pressure Hydrogen Gas in Check Valve during the Opening Process. Energies 2020, 13, 4222. https://doi.org/10.3390/en13164222
Ye J, Zhao Z, Zheng J, Salem S, Yu J, Cui J, Jiao X. Transient Flow Characteristic of High-Pressure Hydrogen Gas in Check Valve during the Opening Process. Energies. 2020; 13(16):4222. https://doi.org/10.3390/en13164222
Chicago/Turabian StyleYe, Jianjun, Zhenhua Zhao, Jinyang Zheng, Shehab Salem, Jiangcun Yu, Junxu Cui, and Xiaoyi Jiao. 2020. "Transient Flow Characteristic of High-Pressure Hydrogen Gas in Check Valve during the Opening Process" Energies 13, no. 16: 4222. https://doi.org/10.3390/en13164222