1. Introduction
Power cables have been extensively used in urban power grids because of their reliable electrical and mechanical properties. In normal operations, partial defects can occur in power cable lines due to long-term environmental, mechanical, and electrical stresses. The further degradation of cable defects can lead to partial discharge (PD) [
1,
2]. It is difficult to find the location of the defects in long underground cable lines. As a result, PD location is a useful method for locating insulation defects in power cables [
3,
4].
Over the years, many studies have been conducted on PD locating methods, and numerous research results have been reported. There are two kinds of PD locating methods: PD signal pulse characteristics analysis and difference of times of arrival (TOA) evaluation [
5]. PD locating methods based on the PD signal pulse characteristics analysis are easier to implement. Among these, the amplitude-frequency mapping method locates the PD source by comparing the time and frequency domain characteristics of PD pulses [
6]. As a result of PD signal propagation, the peak and the bandwidth of the PD pulse decrease, while the time length of the PD pulse increases. In other words, the waveform of the PD signal becomes wider in the time domain and sharper in the frequency domain as PD propagates. These three features, noted as peak value, bandwidth and time length, are used in the amplitude-frequency mapping method to locate PD source. However, PD source in short cable systems is difficult to locate accurately with this method. The rise-time transfer function method can analyze the rise time of the PD pulse to locate the PD source [
7], which only requires detection of the direct pulse at one measuring point. However, the locating result is easily affected by the shape of the original PD pulse.
To improve PD location accuracy, researchers use PD locating methods based on the TOA evaluation to locate the PD source in cable lines [
8]. By using time domain and frequency domain analysis of direct PD waves and reflected PD waves, researchers have proposed a series of effective methods to obtain the TOA. The peak detection method (PDM) obtains the TOA by detecting the peaks of two PD pulses [
9]. Although this method operates easily, it is often influenced by noise. The energy criterion algorithm (ECA) obtains the TOA by determining the variable time of the PD signal energy curve [
10]; the Akaike information criterion (AIC) is an autoregressive time-picking algorithm capable of detecting PD signal arrival time, the AIC curve can be calculated directly from the PD signal itself, and the TOA is obtained by determining the global minimums of AIC curves of two PD pulses [
11]. Both ECA and AIC can reduce the influence of noise, but it is greatly affected by artificial factors. The phase difference method converts the PD signal to the frequency domain and estimates the TOA from the phase difference between the direct PD wave and the reflected PD wave in the frequency domain [
12,
13]. The phase difference method does not consider the frequency-dependent characteristic of phase velocity, so the results of the PD location are not good enough. Because the cross-correlation function can reduce the influence of artificial factors and noise, it is used to locate the PD source [
14]. The traditional cross-correlation function (TCF) method obtains the TOA by calculating the maximum value of the cross-correlation function of the direct PD wave and reflected PD wave. However, in the measured PD signals, the accuracy of all TOA evaluation methods is susceptible to the sampling rate and the frequency-dependent characteristic of phase velocity. Additionally, positioning failure can occur.
To solve the problem of the estimation error of the sampling rate and the frequency-dependent characteristic of phase velocity in the TOA evaluation methods, in this paper, we present a new PD localization method that can more accurately pinpoint the PD location in power cables lines. This method is based on the cross-correlation function of propagation distance (CFD) between the direct and reflected waves of the PD signal. When the value of the proposed function reaches the maximum value, the PD source can be located. The contributions of this paper are as follows:
A new PD localization method is proposed, which can directly obtain the propagation distance between the direct and reflected waves of the PD signal.
Compared with all TOA evaluation methods, the proposed method obtains the propagation distance instead of the time delay. It does not need to determine the point on the waves, so it can eliminate the influence of the sampling rate on positioning accuracy.
The proposed method considers the frequency-dependent characteristic of phase velocity, so it has superior locating precision.
Because the frequency band of the PD signal is narrow in actual tests, the proposed method can reduce the effects of noise by setting the upper and lower limits frequency of PD signal.
In this paper, all abbreviations are listed in
Appendix A for convenience.
2. Principle of Cross-Correlation Method Based on Propagation Distance
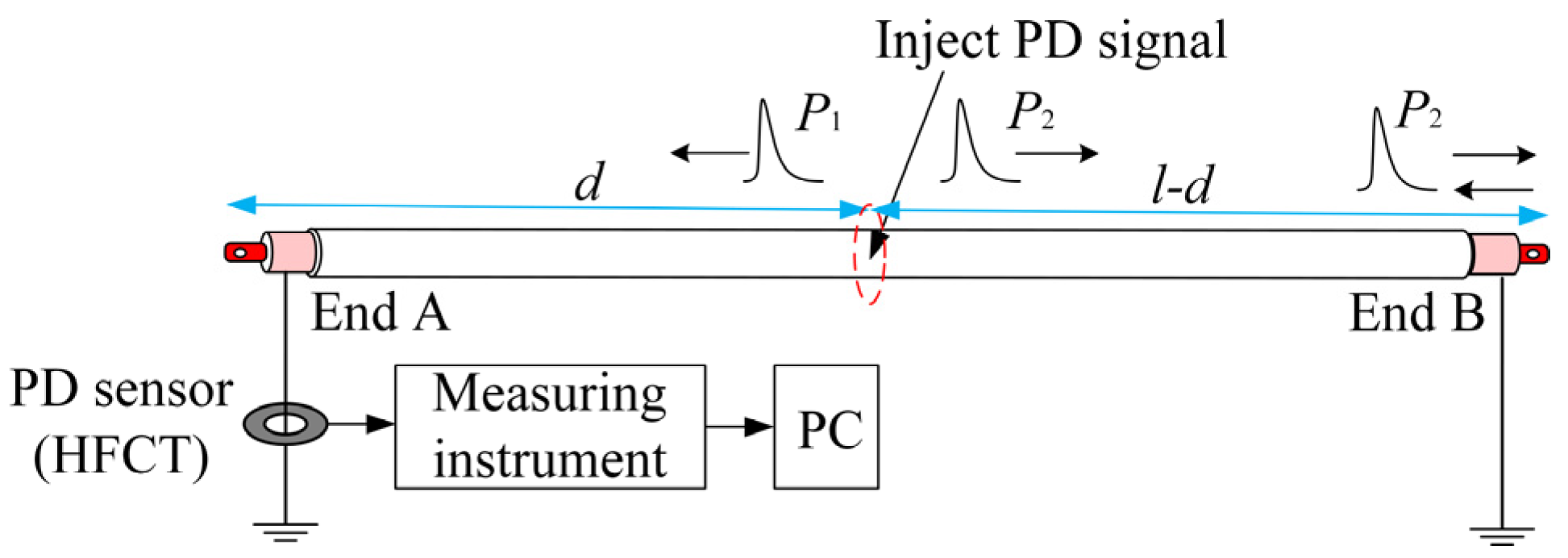
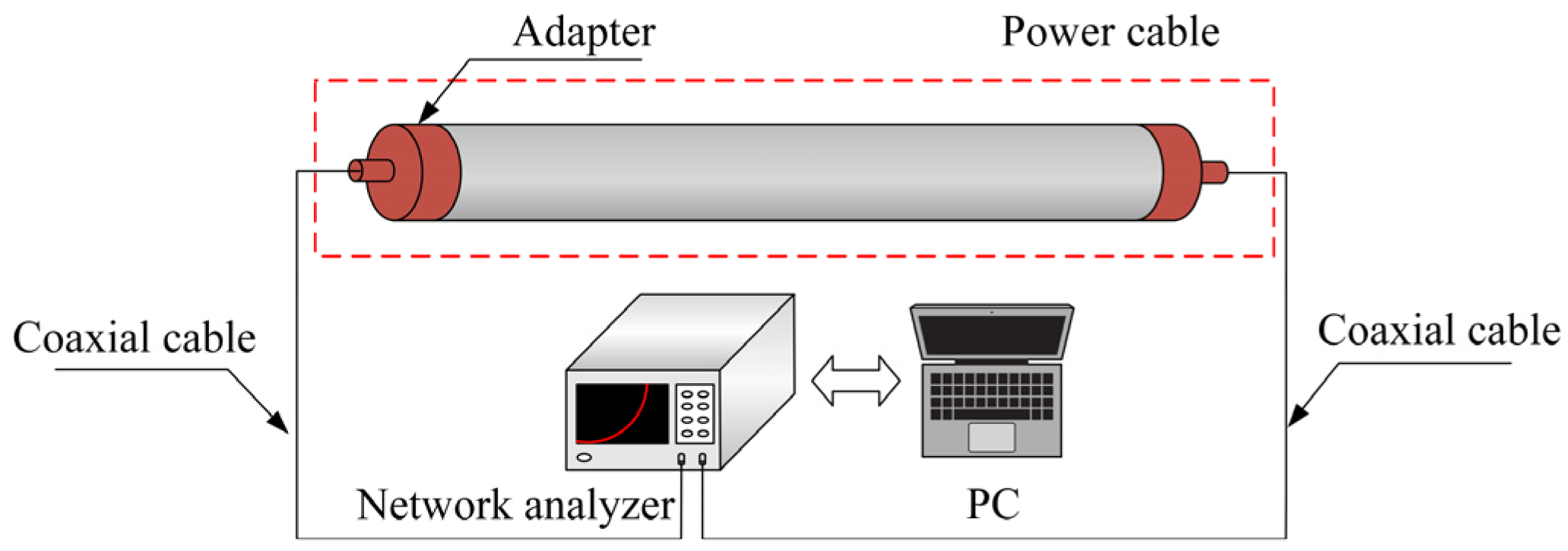
Figure 1 illustrates a simplified single-ended PD measuring system, the length of the cable is
l. The PD signal measuring instrument is connected to the test cable at end A. The remote end B is kept at open circuit. From
Figure 1, the PD signal generated in the cable is simulated by injecting a narrow pulse at the distance of
d from the end A. The injected PD signal will generate two pulses, and one pulse travels toward the measuring end A, and the other travels in the opposite direction toward the remote end B. Once one PD pulse reaches the remote end B, it is reflected and arrives later at the measuring end A, as illustrated in
Figure 1. The first pulse is referred to as direct wave
P1, whereas the second pulse is reflected wave
P2.
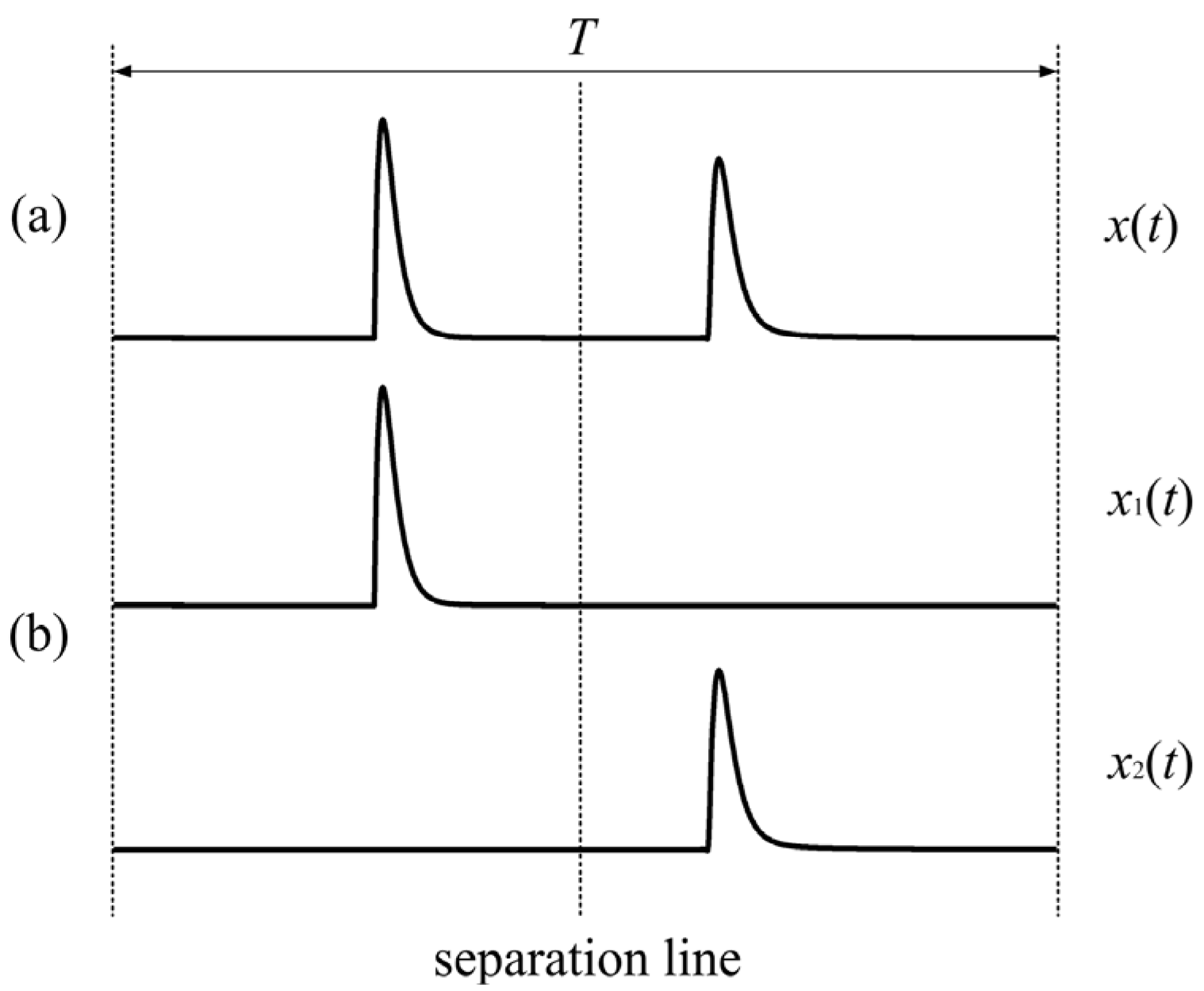
In the proposed method, it is necessary to first obtain the direct wave and the reflected wave for the PD signals. According to the different arrival time at end A, the PD signal is divided into two windows by the separation line shown in
Figure 2. The first window contains the direct wave denoted as
x1(
t), whereas the second window contains the reflected wave denoted as
x2(
t). From
Figure 1, compared with the direct wave, the reflected wave has traveled an additional distance of 2(
l −
d).
Assuming a total record time length of
T for each wave, then deriving the signals in the frequency domain using the Fourier transformation (FT) [
15], we have the following:
where
f is the frequency, and
t is the time.
Because the PD pulse suffers from significant attenuation and dispersion as it travels in the cable, the reflected pulse
X2(
f) is expressed as
where
γ is the propagation constant,
α is the attenuation constant, and
β is the phase constant.
The new cross-correlation function of both signals is defined as
where
r is the propagation distance, and * denotes the complex conjugate.
Replacing
X2(
f) with Equation (3), we can obtain
The parameter
dx is defined as
Inserting Equation (6) into Equation (5), the cross-correlation function is expressed as
When dx = d, the function reaches the maximum value, and the location of the PD source can be obtained.
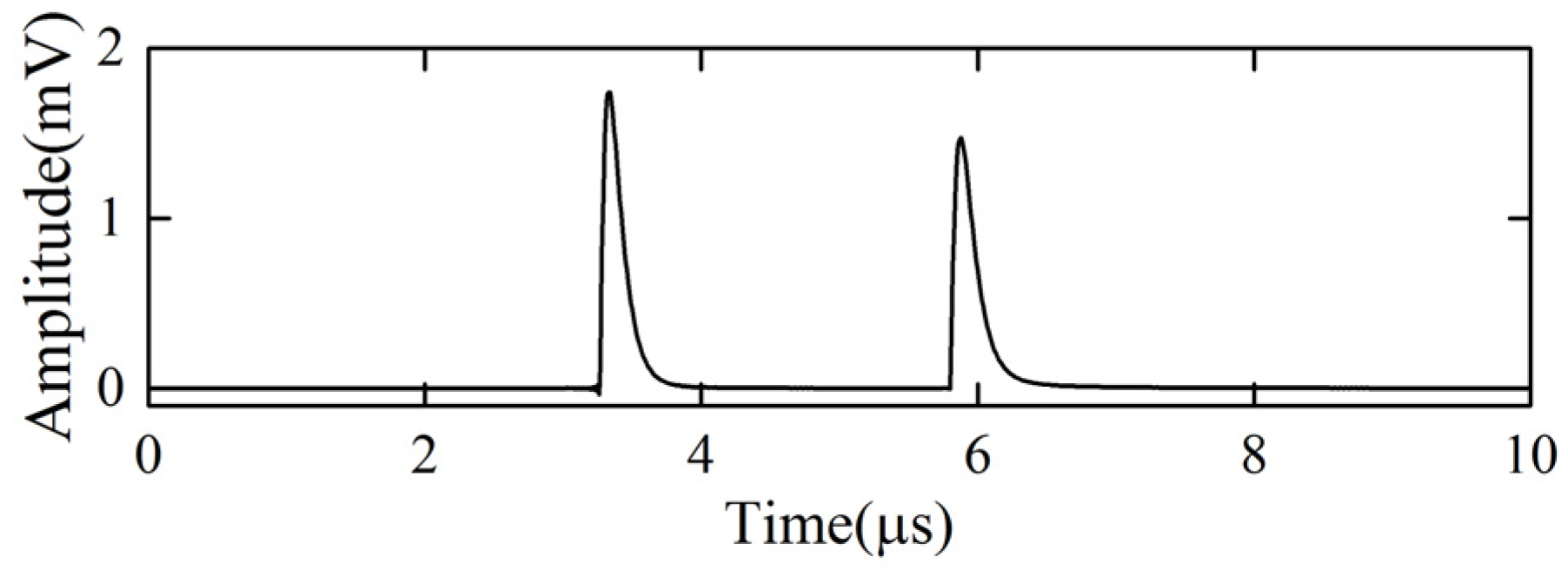
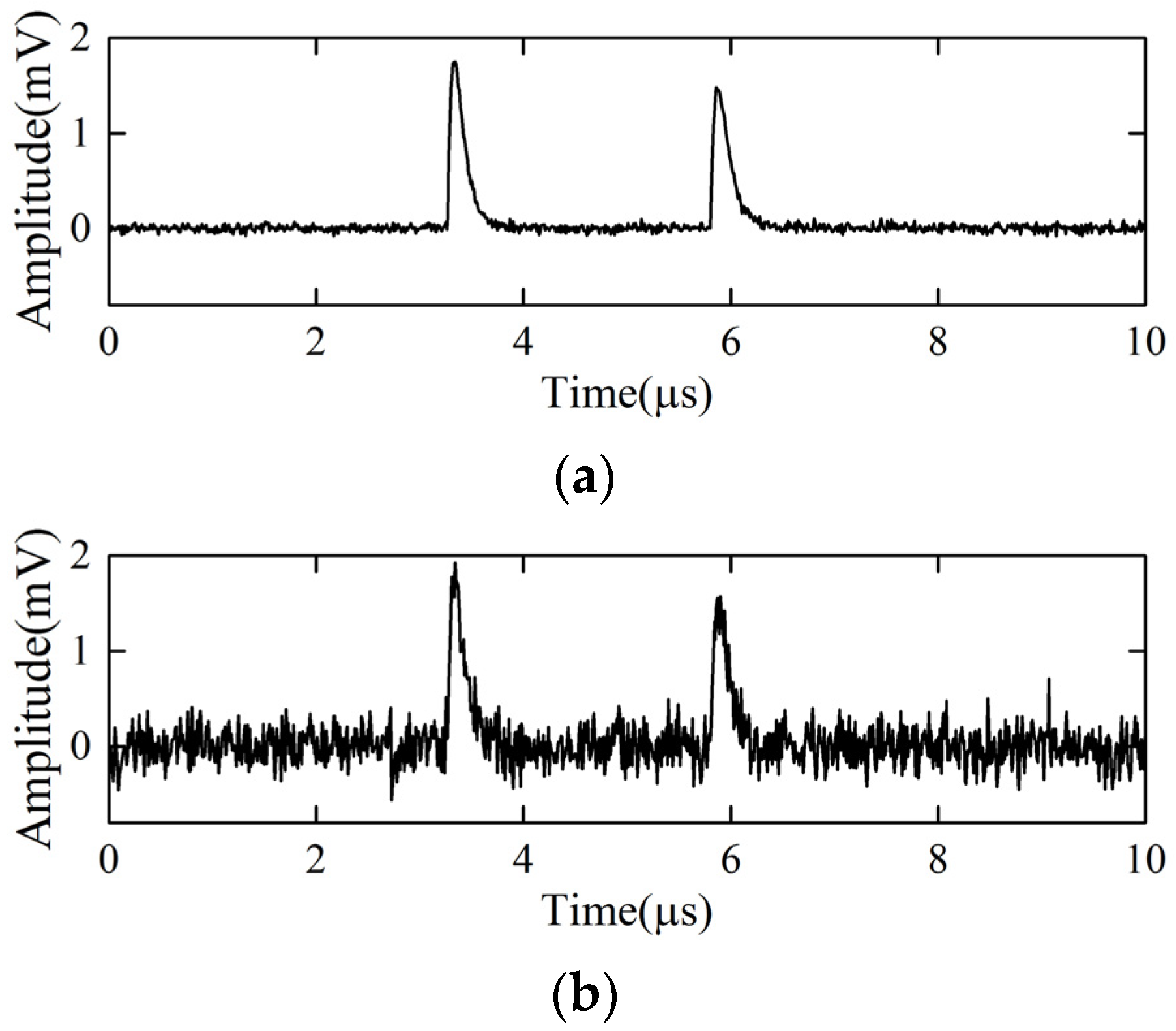
The time domain waveform of field-detected PD signal is shown in
Figure 3a. It was measured on a 10 kV XLPE cable system with a sampling rate of 200 MHz.
Figure 3b shows the frequency domain waveform of field-detected PD signal. The PD signal only dominates the signal in the red area. The noise dominates the signal in most areas. Generally, as shown in
Figure 3, the frequency band of the PD signal is narrow in actual tests [
16]. Except for the center frequency, for the other frequency components, the PD amplitude spectrum is relatively low, and the noise dominates the signal. Thus, the new cross-correlation function can reduce the effects of noise by setting the upper and lower limits frequency in Equation (5). Meanwhile, both
X1(
f) and
X2(
f) are discrete signals, so Equation (5) should be rearranged as Equation (8).
where
k1 and
k2 are the discrete points of upper and lower limits frequency, which is a band-pass filter [
17].
Because the traditional positioning methods use the time delay between the direct wave and the reflected wave to locate the PD source, the positioning accuracy can be influenced by the sampling rate and frequency-dependent characteristic of phase velocity. As shown in Equation (8), because the proposed method uses the propagation distance instead of the time delay, it can eliminate the influences of the sampling rate and frequency-dependent characteristics of phase velocity on positioning accuracy.
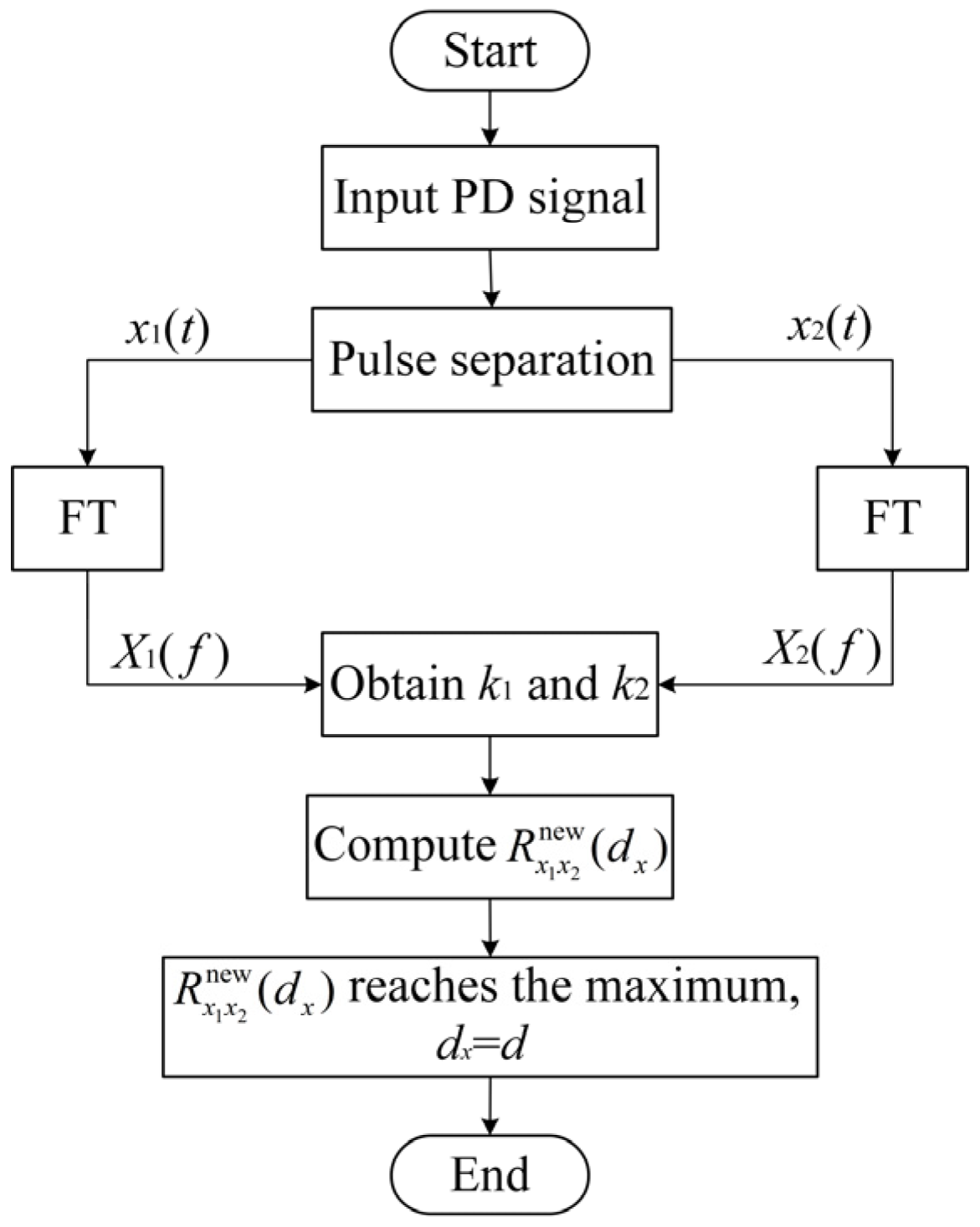
Figure 4 contains a flowchart of the proposed PD location method. The direct wave
x1(
t) and the reflected wave
x2(
t) are obtained using the PD pulse separation procedure as described in
Figure 2. The
x1(
t) and
x2(
t) are transformed into frequency domain signals using the FT. The output of this transformation is
X1(
f) and
X2(
f), respectively. The
k1 and
k2 are obtained by analyzing the frequency range of
X1(
f) and
X2(
f) to reduce the effects of noise. The function
is obtained using Equation (8), and it reaches the maximum value, the location of the PD source can be obtained.
3. Simulation Verification of the Positioning Method
To evaluate the performance of the proposed method, we simulated the PD cable pulse propagation through a computer. The cable model is a 10 kV XLPE cable with a length of
l = 500 m, and
Table 1 shows the parameters. We injected the PD pulse at the distance of
d = 250 m, which is in the middle of the cable. The distributed parameters of the cable can be approximately formulated as follows, according to [
18,
19]:
where
R,
L,
G, and
C separately represent the unit resistance, inductance, conductance, and capacitance of the cable line in a distributed parameter model;
rc and
rs are the cable core and shielding layer radiuses, respectively;
ρc and
ρs are the resistivities of cable core and shielding layer, respectively;
is the vacuum permeability, and ɛ is the dielectric constant of the XLPE material; σ is the conductivity of the XLPE material, whereas
is the angular frequency.
The PD cable propagation characteristic is simulated by using the transfer function
s1(
t) [
7], which is defined by the following:
where
S(
ω) is the FT of original PD signal
s(
t); IFT is the inverse Fourier transform;
h is the propagation distance of
s(
t); and
γ is defined by [
19]
3.1. PD Signal Model
The PD signal is commonly represented by a double-exponential pulse [
20,
21], and it is given by
where
= 100 ns is the attenuation time constant of the PD signal, and the voltage multiplier
A is 10 mV.
We injected the PD pulse at the distance of
d = 250 m to obtain the PD waveform shown in
Figure 5. The sampling rate is 100 MHz, and the time window
T is 10 μs.
In the proposed method, the PD pulses must be split into the direct wave
x1(
t) and the reflected wave
x2(
t) using the pulse separation procedure, as illustrated in
Figure 2.
Figure 6 shows the magnitude-frequency spectrums of
x1(
t) and
x2(
t) using the FT.
Intuitively, with the increase in propagation distance, the signal becomes wider in the time domain (see
Figure 5) and sharper in the frequency domain (see
Figure 6). The frequency-dependent characteristic of phase velocity causes the differences of the waveform in the direct PD pulse and the reflected PD pulse, which will affect the accuracy of PD location through the traditional cross-correlation algorithm. The frequency range of the PD pulse is limited, as shown in
Figure 6, so the method will obtain better noise resistance performance by setting proper parameters of
k1 and
k2, which are like a band-pass filter.
k1 and
k2 are set to 1 and 140 in
Figure 6.
3.2. Results of the PD Location
Figure 7 displays the normalized CFD curve, and it reaches the maximum value when
dx = 250 m, so the proposed method can accurately locate the PD source. Meanwhile,
Figure 7 shows the comparison of the normalized curves between the TCF and CFD. For the comparison, the independent TCF variable is converted from delay time to distance
dς from the end A by Equation (16).
where
ς is the delay time, and
is the mean of the high-frequency phase velocity.
Compared with TCF, because the CFD method considers the frequency-dependent characteristic of phase velocity in Equation (8), the CFD curve is more symmetrical and accurately locates the PD source. The value of parameter dx in Equation (8) can be easily adjusted, but the value of parameter dς of the TCF curve is determined by the sampling rate, so the CFD curve has a higher resolution and is more smooth, which also makes the location accuracy higher.
Table 2 shows the absolute error values of the PDM, ECA, TCF, and CFD at a distance of
d = 250 m. The fixed phase velocity of PD pulses in PDM, ECA, and TCF is calculated by the mean of the high-frequency phase velocity. According to
Table 2, the locating algorithm proposed in this paper has the smallest absolute error, thus obtaining higher positioning accuracy. The proposed method does not need to determine the point on the waves, which is important for the measurement of the arrival time interval. This is an advantage of the proposed algorithm over the traditional TOA evaluation methods, including PDM, ECA, and TCF.
3.3. The Influence of Propagation Distance on Localization Accuracy
With the increase in propagation distance, more distortion of the reflected wave would occur because of the attenuation and dispersion on the cable, which will affect the location accuracy. To analyze the effect of propagation distance on the location accuracy, we used different cable models with different lengths for comparison.
Similarly, we injected the PD pulse in the middle of the cables with different lengths to obtain absolute errors for the various PD location methods in
Figure 8. The
T is 50 μs.
For the traditional TOA evaluation methods, the location absolute error values will increase with the increase in propagation distance for the influences of phase velocity and waveform distortion. Compared with other algorithms, because the proposed locating algorithm considers the frequency-dependent characteristic of phase velocity, the method performs excellently and has minimal location error for the PD signal.
3.4. The Influence of the Sampling Rate on Localization Accuracy
The acquisition equipment sampling rate also affects the PD waveform. As a result, the location accuracy will be affected. To analyze the effects of the sampling rate on location accuracy, we changed the PD waveform sampling rate described in
Section 3.1.
Figure 9 shows the absolute errors of different sampling rates on the PD location estimation.
The equipment sampling rate will affect the location accuracy of traditional TOA evaluation methods. However, in all cases, the absolute error of the proposed locating algorithm approaches zero. When the sampling rate is low, the traditional TOA evaluation methods are difficult to accurately determinate the point on the waves. However, the proposed locating algorithm uses the propagation distance instead of the time delay. Even at a low sampling rate, it can also achieve a low positioning error.
In
Figure 8 and
Figure 9, we can obtain the accurate phase constant of cable in simulation, thus the CFD curve can accurately locate the PD source. On the other hand, the PD signal has no noise in
Figure 8 and
Figure 9. As a result, the absolute error of the proposed method approaches zero.
3.5. The Influence of White Noise on Localization Accuracy
The white Gaussian noise (WGN) is added into the simulated PD signal in
Figure 5 to imitate the PD signal in actual conditions.
Figure 10 shows the simulated PD pulse with three different signal-to-noise ratios (SNRs) white noises (i.e., 30 dB, 15 dB, and 5 dB). These SNRs represent small, moderate, and large noise, respectively.
To evaluate the localization effects of the four locating algorithms, the mean location error (MLE) is defined as [
12]:
where
dxi is the estimated location, and
p = 100.
Table 3 shows the results of the MLE of the four location methods at a distance of
d = 250 m. In the noisy environment with an SNR of 30 dB to 5 dB, the location algorithm proposed in this paper has the lowest MLE values, thus obtaining higher positioning accuracy.
Figure 11 shows the statistical analysis of different location methods under 15 dB. Compared with the four location methods, the location algorithm proposed in this paper has the smallest diversity of results, and the max location absolute error is less than 0.5%. It should be noted that
k1 and
k2 in Equation (8) are set to 1 and 50, respectively, to reduce the influences of WGN.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














