Model Predictive Virtual Synchronous Control of Permanent Magnet Synchronous Generator-Based Wind Power System


Abstract
:1. Introduction
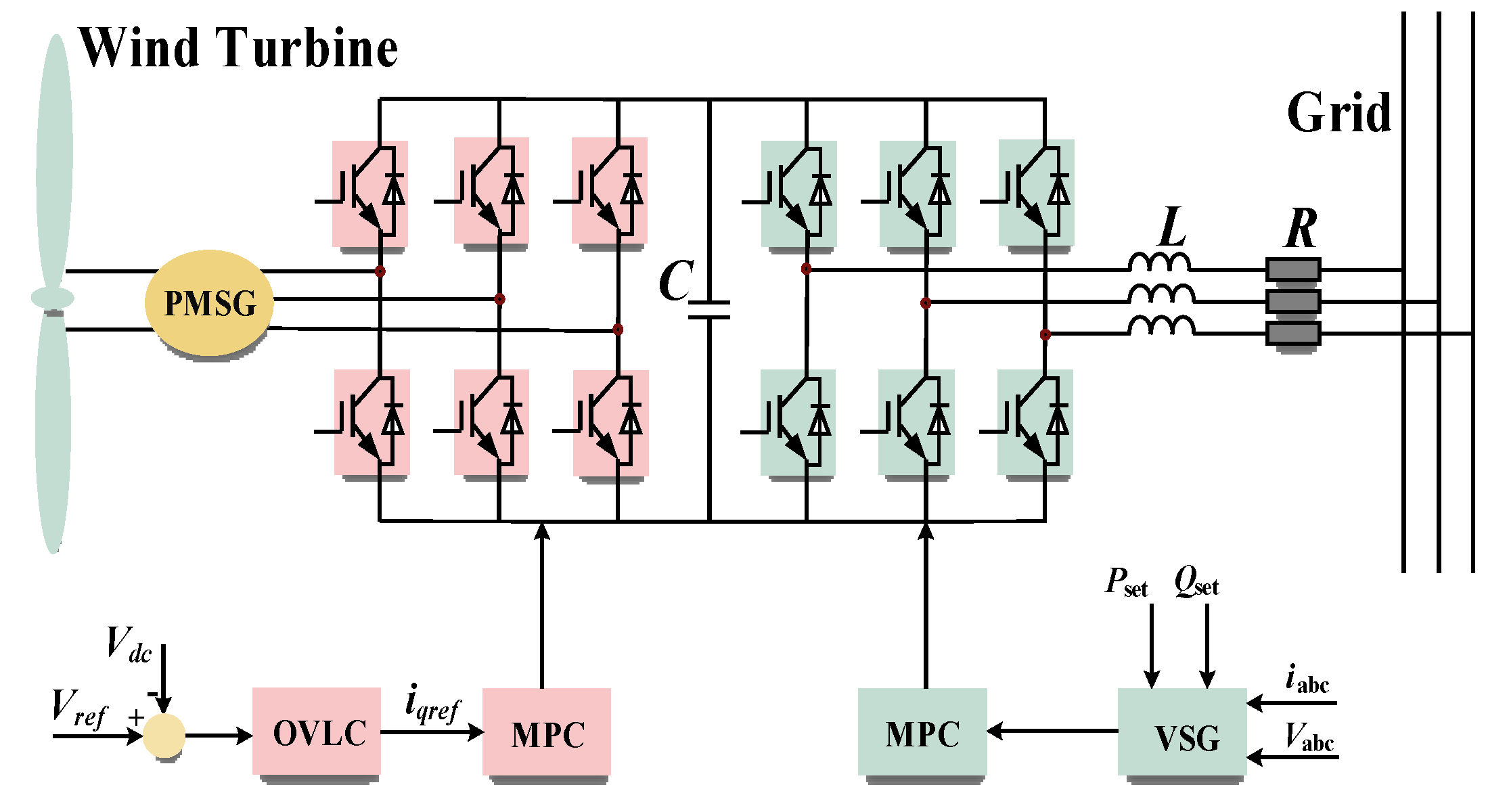
2. Outer-Voltage Loop Control and Model Predictive Control in Generator-Side
2.1. Wind Power System
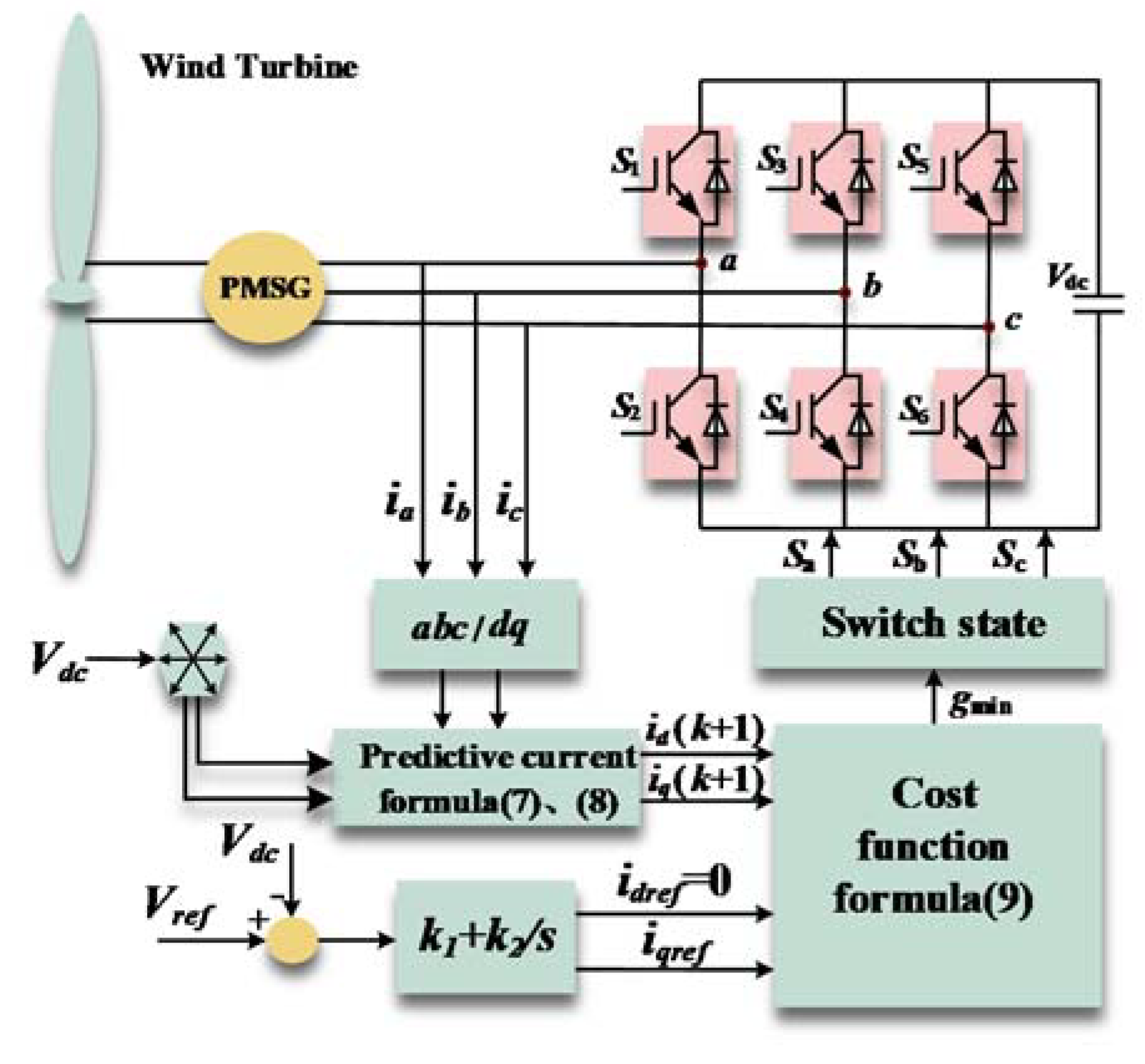
2.2. Establish Permanent Magnet Synchronous Generator Current Model
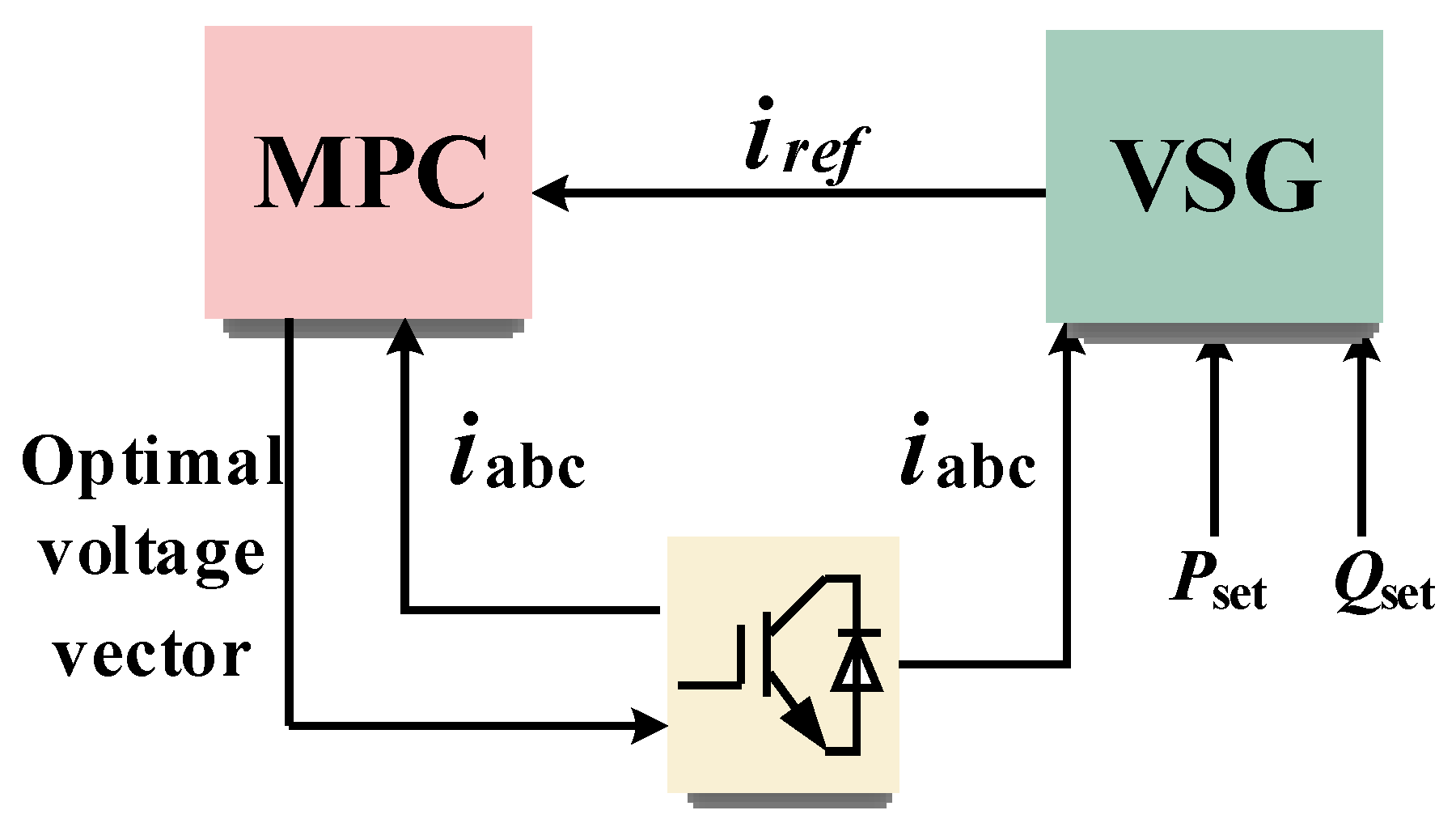
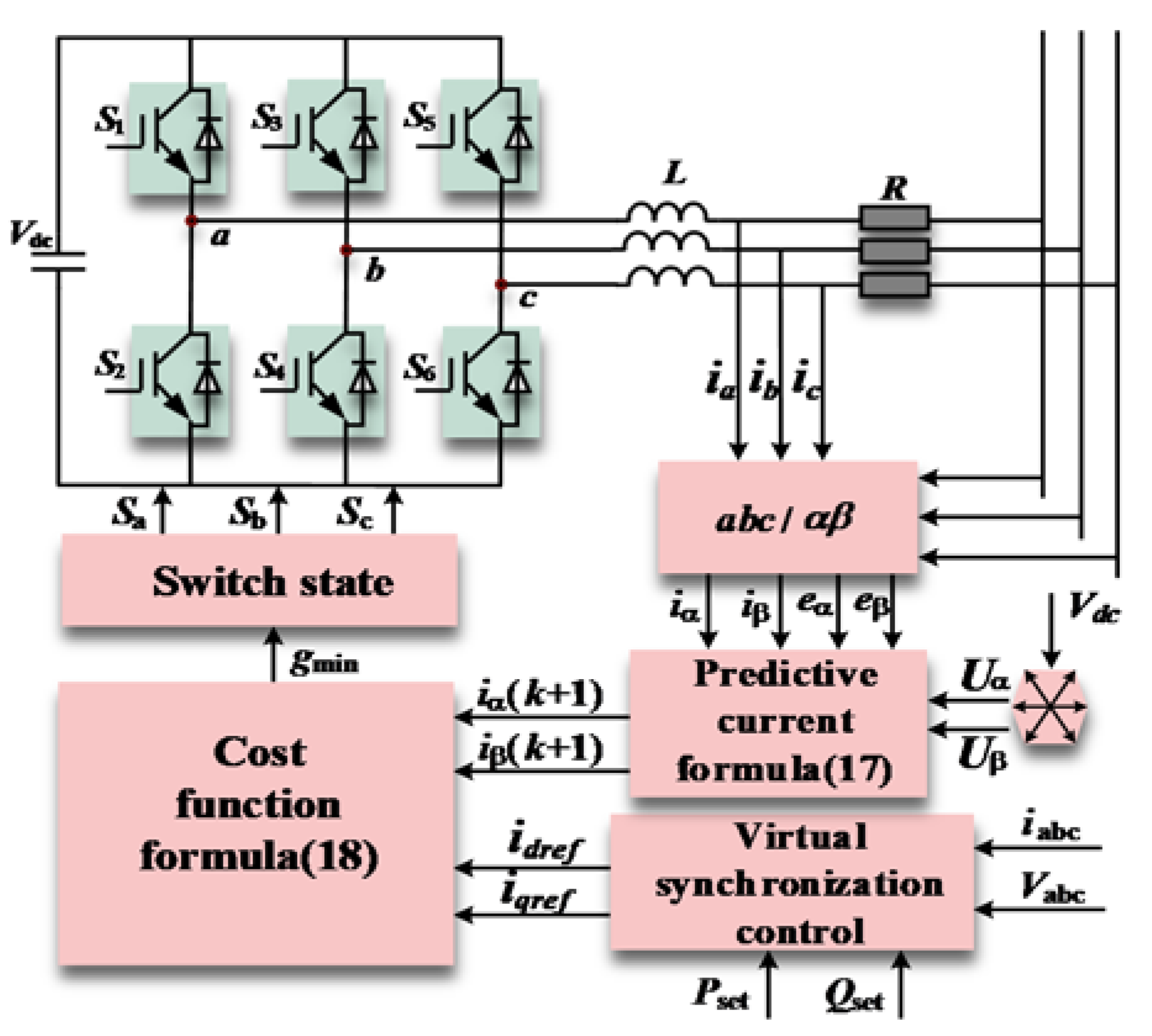
3. Virtual Synchronous Inverter in Grid-Side
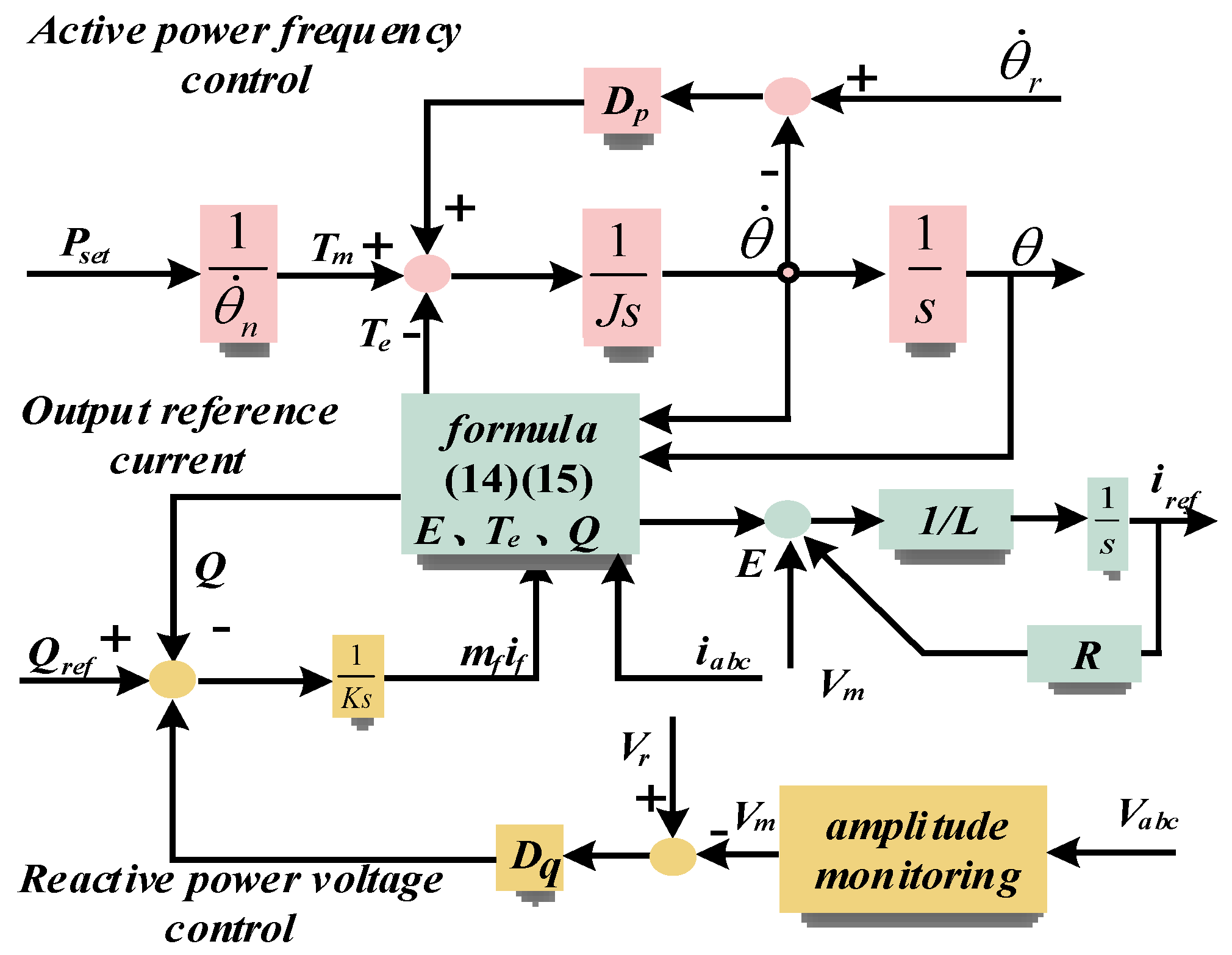
3.1. Virtual Synchronous Generator Mathematical Model in Grid-Side
3.2. Establish Virtual Synchronous Generator Prediction Control Model
4. Simulation Verification
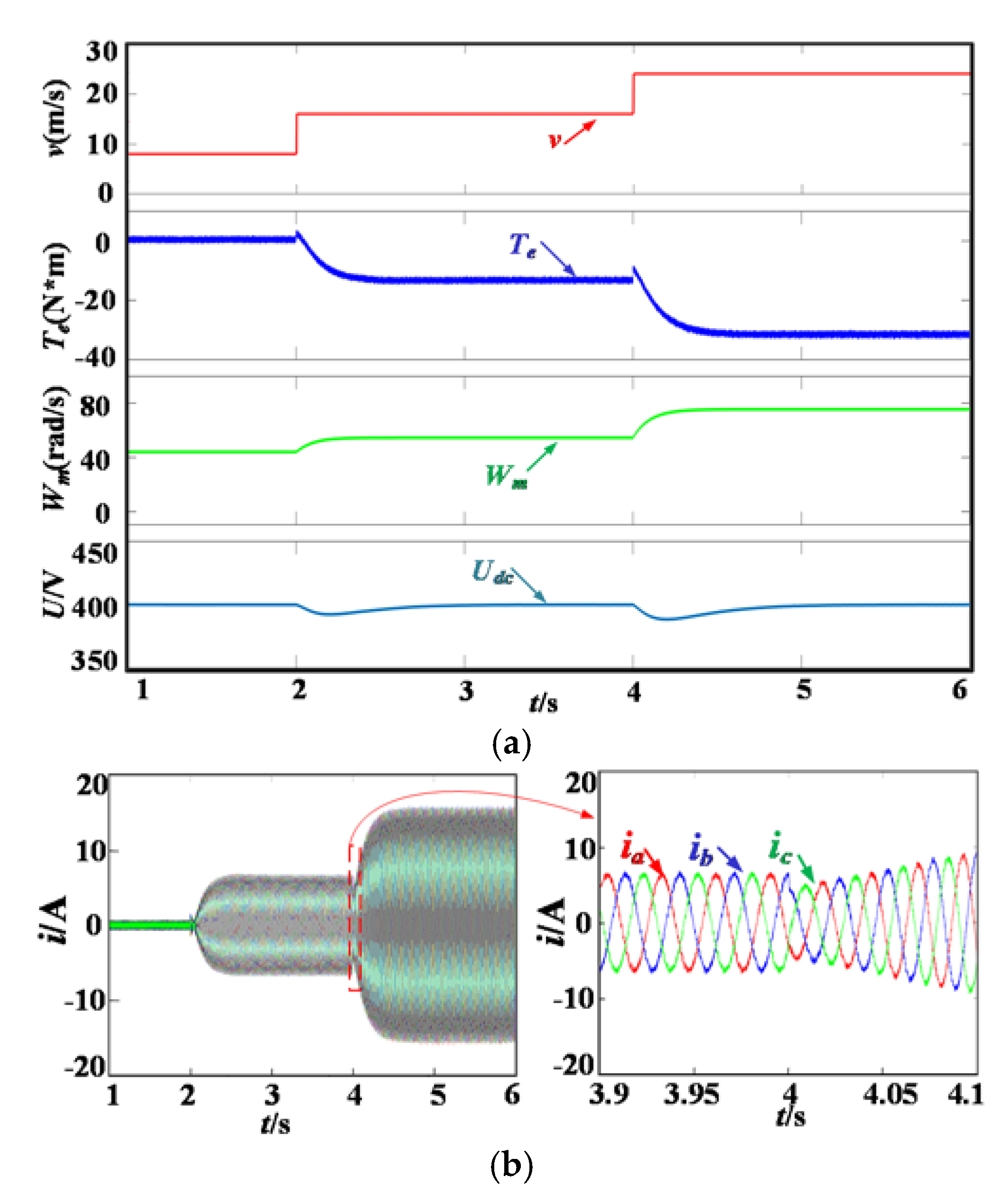
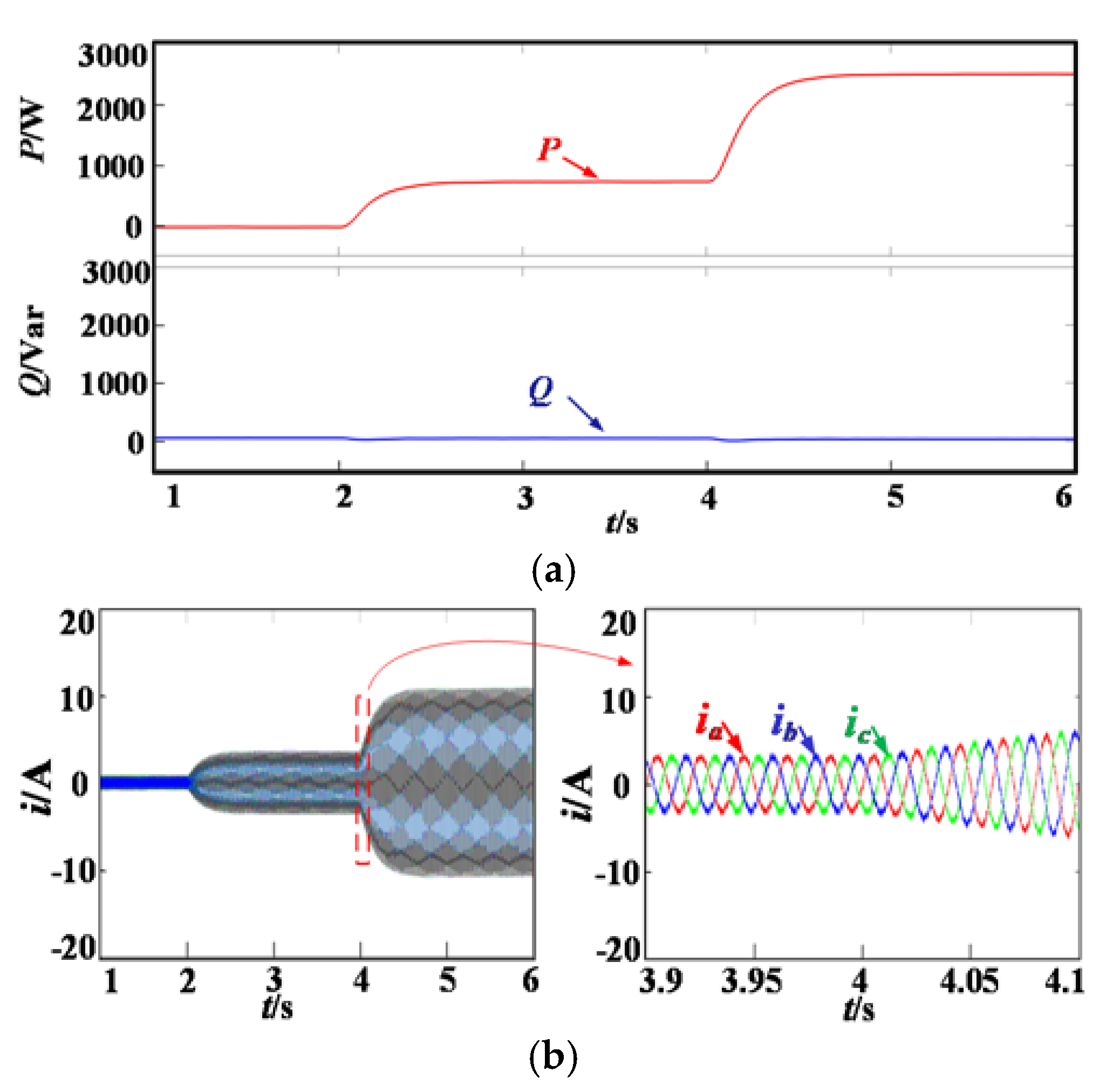
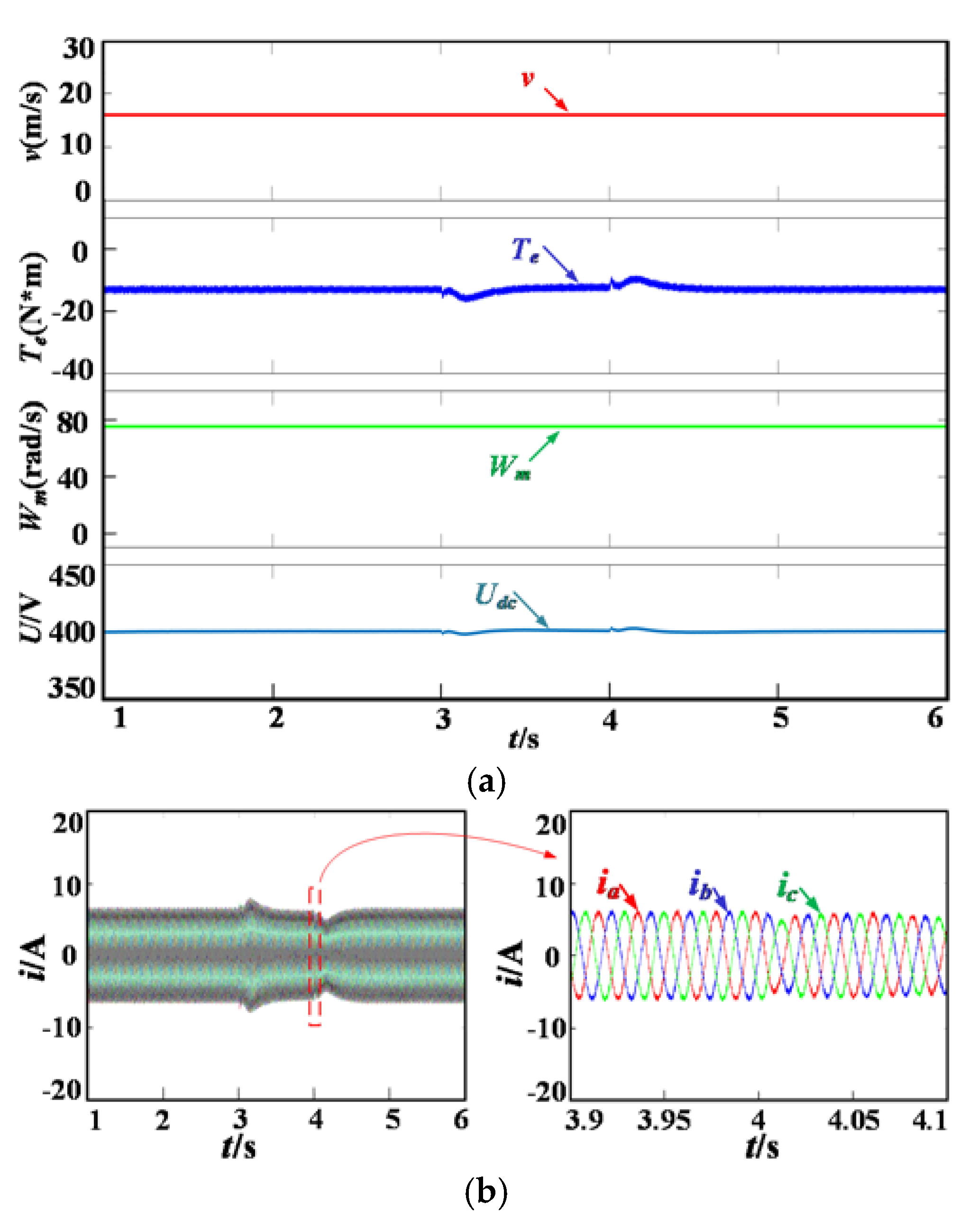
4.1. Simulation Waveform of Wind Speed Variations
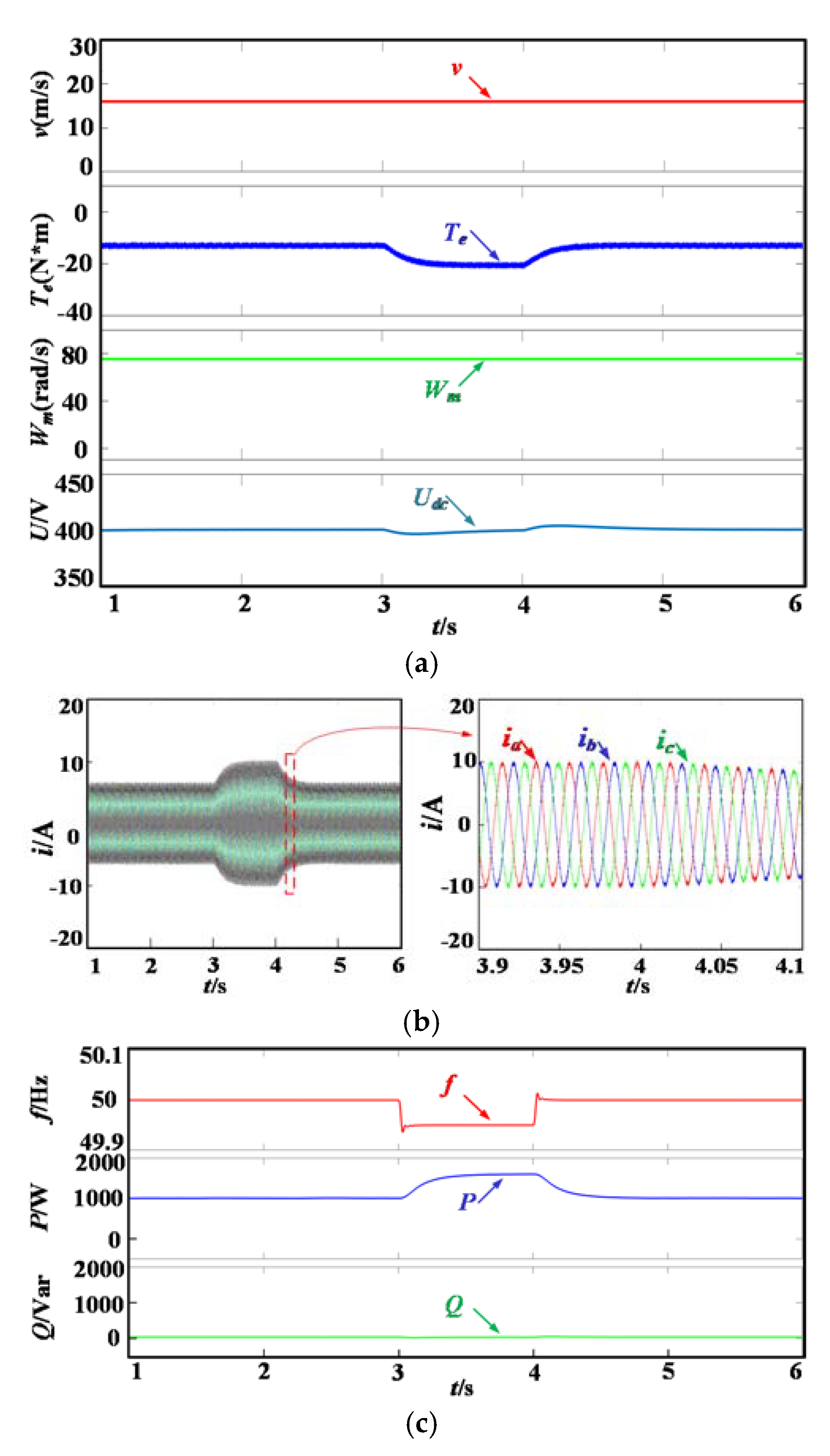
4.2. Simulation Results of Frequency Variation
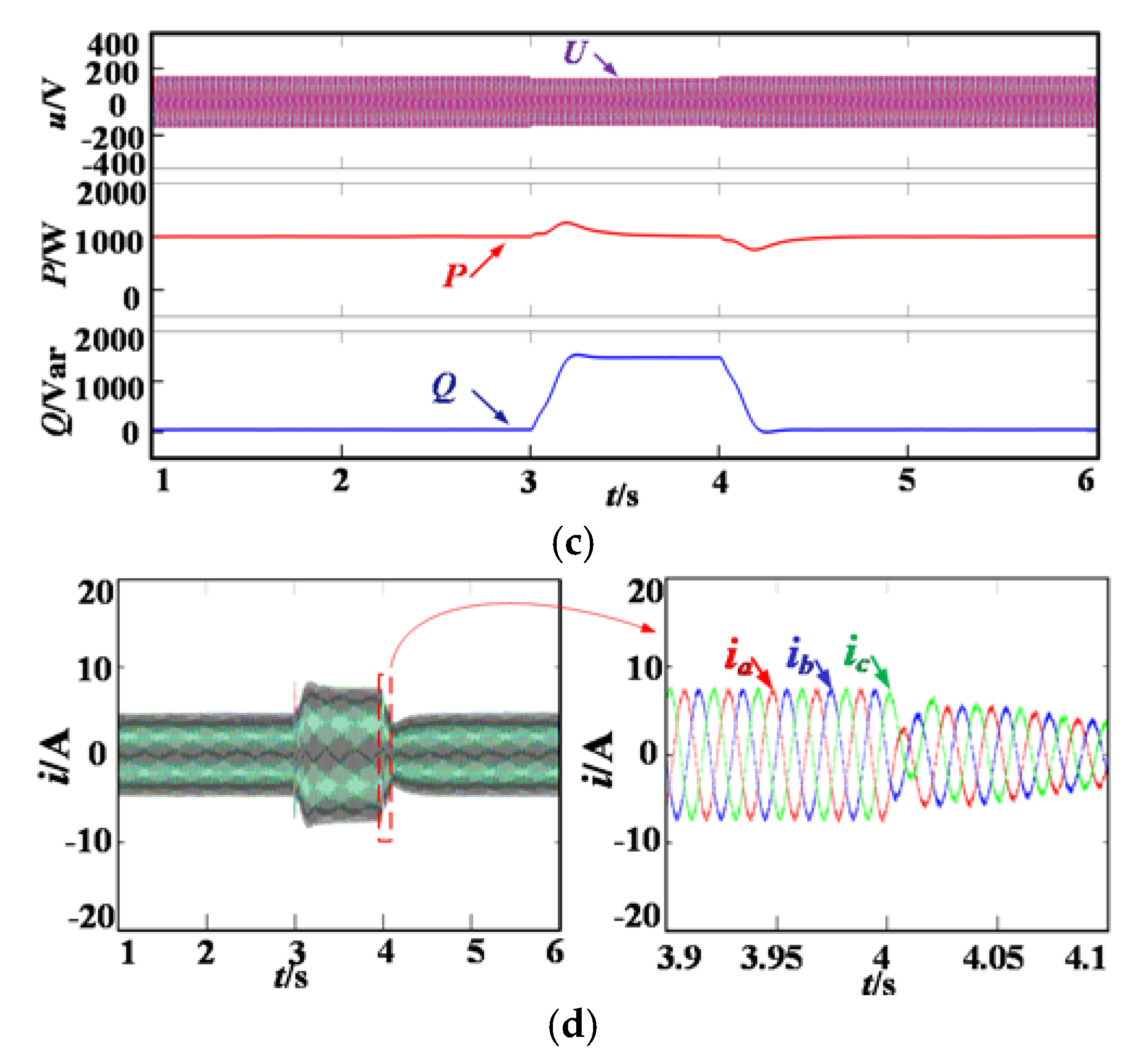
4.3. Simulation Waveform of Voltage Variation
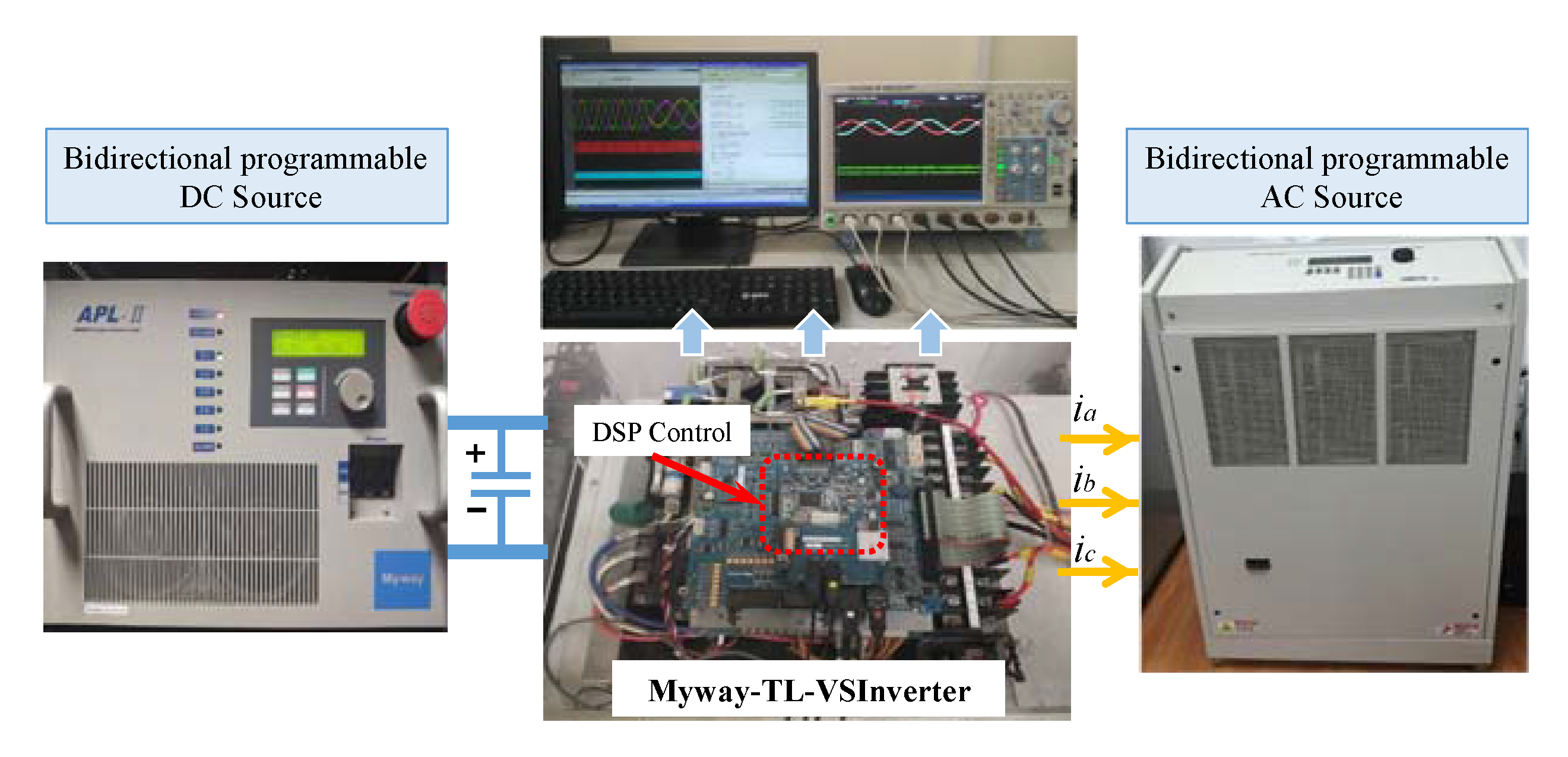
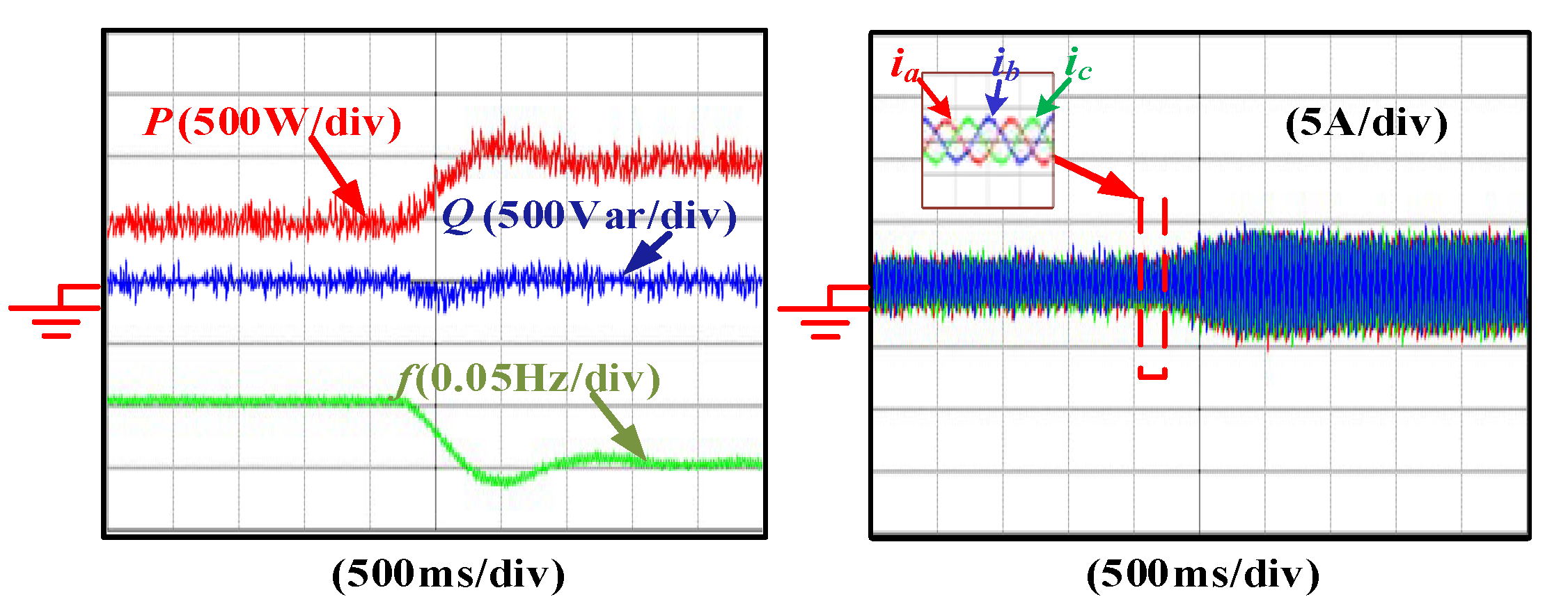
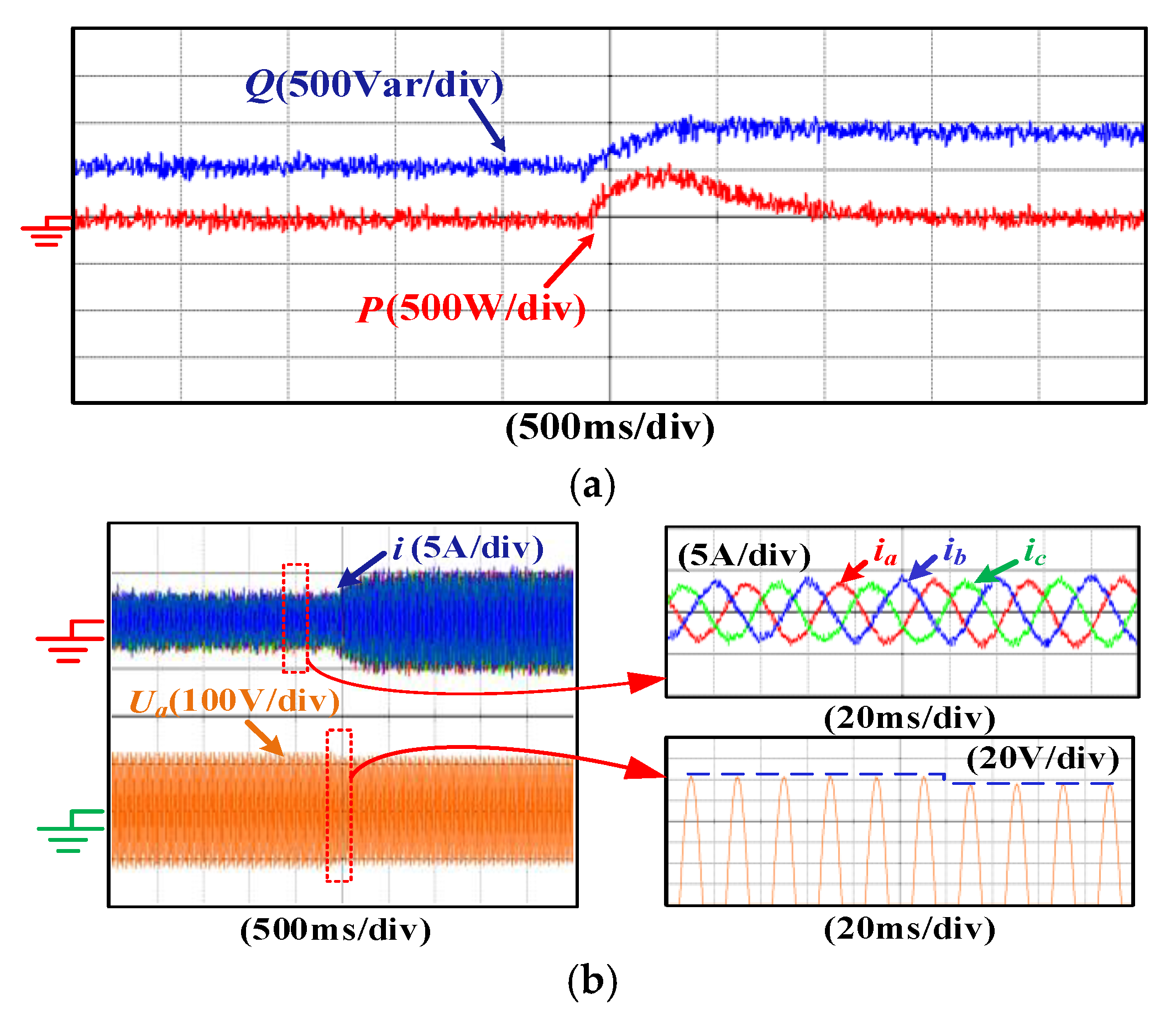
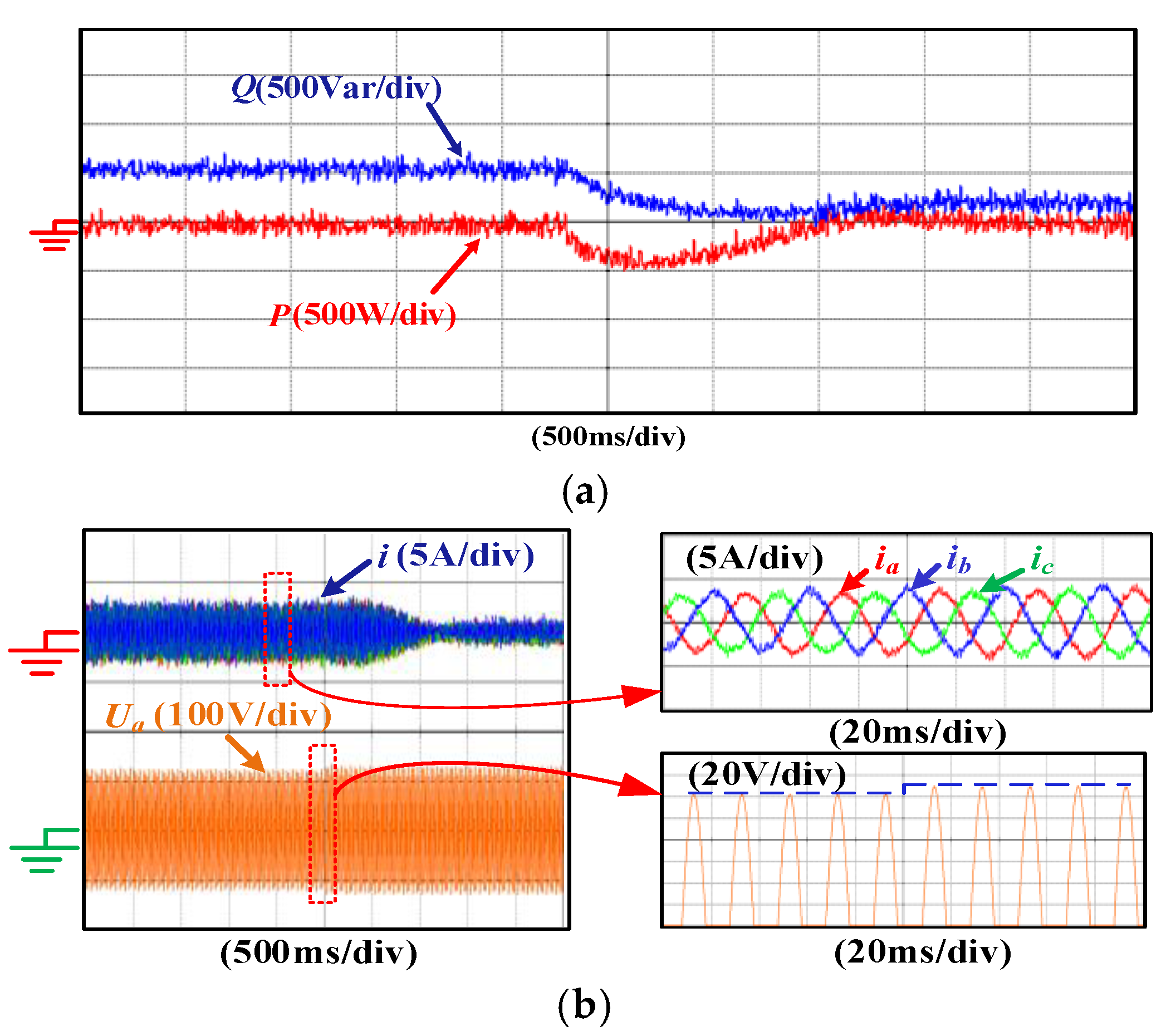
5. Grid Side Experimental Verification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vita, G.; Šarkić-Glumac, A.; Hemida, H.; Salvadori, S.; Baniotopoulos, C. On the Wind Energy Resource above High-Rise Buildings. Energies 2020, 13, 3641. [Google Scholar] [CrossRef]
- Sarkar, M.R.; Julai, S.; Tong, C.W.; Uddin, M.; Romlie, M.; Shafiullah, G. Hybrid Pitch Angle Controller Approaches for Stable Wind Turbine Power under Variable Wind Speed. Energies 2020, 13, 3622. [Google Scholar] [CrossRef]
- Andrychowicz, M. Comparison of the Use of Energy Storages and Energy Curtailment as an Addition to the Allocation of Renewable Energy in the Distribution System in Order to Minimize Development Costs. Energies 2020, 13, 3746. [Google Scholar] [CrossRef]
- Go, S.-I.; Yun, S.-Y.; Ahn, S.-J.; Choi, J.-H. Voltage and Reactive Power Optimization Using a Simplified Linear Equations at Distribution Networks with DG. Energies 2020, 13, 3334. [Google Scholar] [CrossRef]
- Chen, J.; Li, C. Design Optimization and Coupled Dynamics Analysis of an Offshore Wind Turbine with a Single Swivel Connected Tether. Energies 2020, 13, 3526. [Google Scholar] [CrossRef]
- Jin, N.; Hu, S.; Gan, C.; Ling, Z. Finite States Model Predictive Control for Fault-Tolerant Operation of a Three-Phase Bidirectional AC/DC Converter Under Unbalanced Grid Voltages. IEEE Trans. Ind. Electron. 2018, 65, 819–829. [Google Scholar] [CrossRef]
- Guo, L.; Jin, N.; Li, Y.; Luo, K. A Model Predictive Control Method for Grid-Connected Power Converters without AC Voltage Sensors. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Guo, L.; Jin, N.; Gan, C.; Xu, L.; Wang, Q. An Improved Model Predictive Control Strategy to Reduce Common-Mode Voltage for Two-Level Voltage Source Inverters Considering Dead-Time Effects. IEEE Trans. Ind. Electron. 2019, 66, 3561–3572. [Google Scholar] [CrossRef]
- Nayanar, V.; Kumaresan, N.; Gounden, N.A. A Single Sensor Based MPPT Controller for Wind-Driven Induction Generators Supplying DC Microgrid. IEEE Trans. Power Electron. 2015, 31, 1161–1172. [Google Scholar] [CrossRef]
- Singh, M.; Chandra, A. Power maximization and voltage sag/swell ride-through capability of PMSG based variable speed wind energy conversion system. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 2206–2211. [Google Scholar]
- Pena-Alzola, R.; Campos-Gaona, D.; Ksiazek, P.F.; Ordonez, M. DC-Link Control Filtering Options for Torque Ripple Reduction in Low-Power Wind Turbines. IEEE Trans. Power Electron. 2016, 32, 4812–4826. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Lee, S.H.; Park, J.-W. Inertia-Free Stand-Alone Microgrid—Part II: Inertia Control for Stabilizing DC-Link Capacitor Voltage of PMSG Wind Turbine System. IEEE Trans. Ind. Appl. 2018, 54, 4060–4068. [Google Scholar] [CrossRef]
- Beck, H.-P.; Hesse, R.; Beck, I.H.-P.; Hesse, D.I.R. Virtual synchronous machine. In Proceedings of the 2007 9th International Conference on Electrical Power Quality and Utilisation, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar]
- Zhong, Q.-C. Virtual Synchronous Machines: A unified interface for grid integration. IEEE Power Electron. Mag. 2016, 3, 18–27. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Nguyen, P.-L.; Ma, Z.; Sheng, W. Self-Synchronized Synchronverters: Inverters without a Dedicated Synchronization Unit. IEEE Trans. Power Electron. 2013, 29, 617–630. [Google Scholar] [CrossRef]
- Fang, J.; Tang, Y.; Li, H.; Li, X. A Battery/Ultracapacitor Hybrid Energy Storage System for Implementing the Power Management of Virtual Synchronous Generators. IEEE Trans. Power Electron. 2018, 33, 2820–2824. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, L.; Feng, X.; Guo, H. An Adaptive Control Strategy for Virtual Synchronous Generator. IEEE Trans. Ind. Appl. 2018, 54, 5124–5133. [Google Scholar] [CrossRef]
- Shi, K.; Song, W.; Xu, P.; Liu, R.; Fang, Z.; Ji, Y. Low-Voltage Ride-Through Control Strategy for a Virtual Synchronous Generator Based on Smooth Switching. IEEE Access 2018, 6, 2703–2711. [Google Scholar] [CrossRef]
- Zheng, X.; Wang, C.; Pang, S. Injecting positive-sequence current virtual synchronous generator control under unbalanced grid. IET Renew. Power Gener. 2019, 13, 165–170. [Google Scholar] [CrossRef]
- Xi, J.; Geng, H.; Ma, S.; Chi, Y.; Yang, G. Inertial response characteristics analysis and optimisation of PMSG-based VSG-controlled WECS. IET Renew. Power Gener. 2018, 12, 1741–1747. [Google Scholar] [CrossRef]
- Elsisi, M.; Soliman, M.; Aboelela, M.A.; Mansour, W. Model predictive control of plug-in hybrid electric vehicles for frequency regulation in a smart grid. IET Gener. Transm. Distrib. 2017, 11, 3974–3983. [Google Scholar] [CrossRef]
- Wang, J.; Ding, B.; Wang, Y. Two-step MPC for systems with input non-linearity and norm-bounded disturbance. IET Control. Theory Appl. 2019, 13, 183–190. [Google Scholar] [CrossRef]
- Ma, Z.; Zhang, X.; Huang, J.; Zhao, B. Stability-Constraining-Dichotomy-Solution-Based Model Predictive Control to Improve the Stability of Power Conversion System in the MEA. IEEE Trans. Ind. Electron. 2018, 66, 5696–5706. [Google Scholar] [CrossRef]
- Kim, S.-K.; Choi, D.-K.; Lee, K.-B.; Lee, Y.I. Offset-Free Model Predictive Control for the Power Control of Three-Phase AC/DC Converters. IEEE Trans. Ind. Electron. 2015, 62, 7114–7126. [Google Scholar] [CrossRef]
- Jin, C.; Li, W.; Shen, J.; Li, P.; Liu, L.; Wen, K.; Wei-Dong, L. Active Frequency Response Based on Model Predictive Control for Bulk Power System. IEEE Trans. Power Syst. 2019, 34, 3002–3013. [Google Scholar] [CrossRef]
- Rodriguez, J.L.; Burgos, J.C.; Amalte, L. Sistemas Eolicos de Produccion de Energia Electrica; Editorial Rueda S.L.: Madrid, Spain, 2003. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | Symbol | Value |
|---|---|---|
| Reference DC voltage | Vref | 400 V |
| Filter inductance | L | 10 mH |
| Line resistance | R | 0.01 Ω |
| Power line voltage | U | 190 V |
| Power line frequency | f | 50 Hz |
| Sampling frequency | fs | 10 kHz |
| Voltage sag coefficient | Dq | 5 |
| Inertia | J | 0.0122 |
| Damping coefficient | Dp | 50 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Zhao, Y.; Dou, Z.; Li, Y.; Guo, L. Model Predictive Virtual Synchronous Control of Permanent Magnet Synchronous Generator-Based Wind Power System. Energies 2020, 13, 5022. https://doi.org/10.3390/en13195022
Sun Y, Zhao Y, Dou Z, Li Y, Guo L. Model Predictive Virtual Synchronous Control of Permanent Magnet Synchronous Generator-Based Wind Power System. Energies. 2020; 13(19):5022. https://doi.org/10.3390/en13195022
Chicago/Turabian StyleSun, Yusheng, Yaqian Zhao, Zhifeng Dou, Yanyan Li, and Leilei Guo. 2020. "Model Predictive Virtual Synchronous Control of Permanent Magnet Synchronous Generator-Based Wind Power System" Energies 13, no. 19: 5022. https://doi.org/10.3390/en13195022