Design and Analysis of a Linear Memory Machine for Ocean Wave Power Generation


Abstract
:1. Introduction
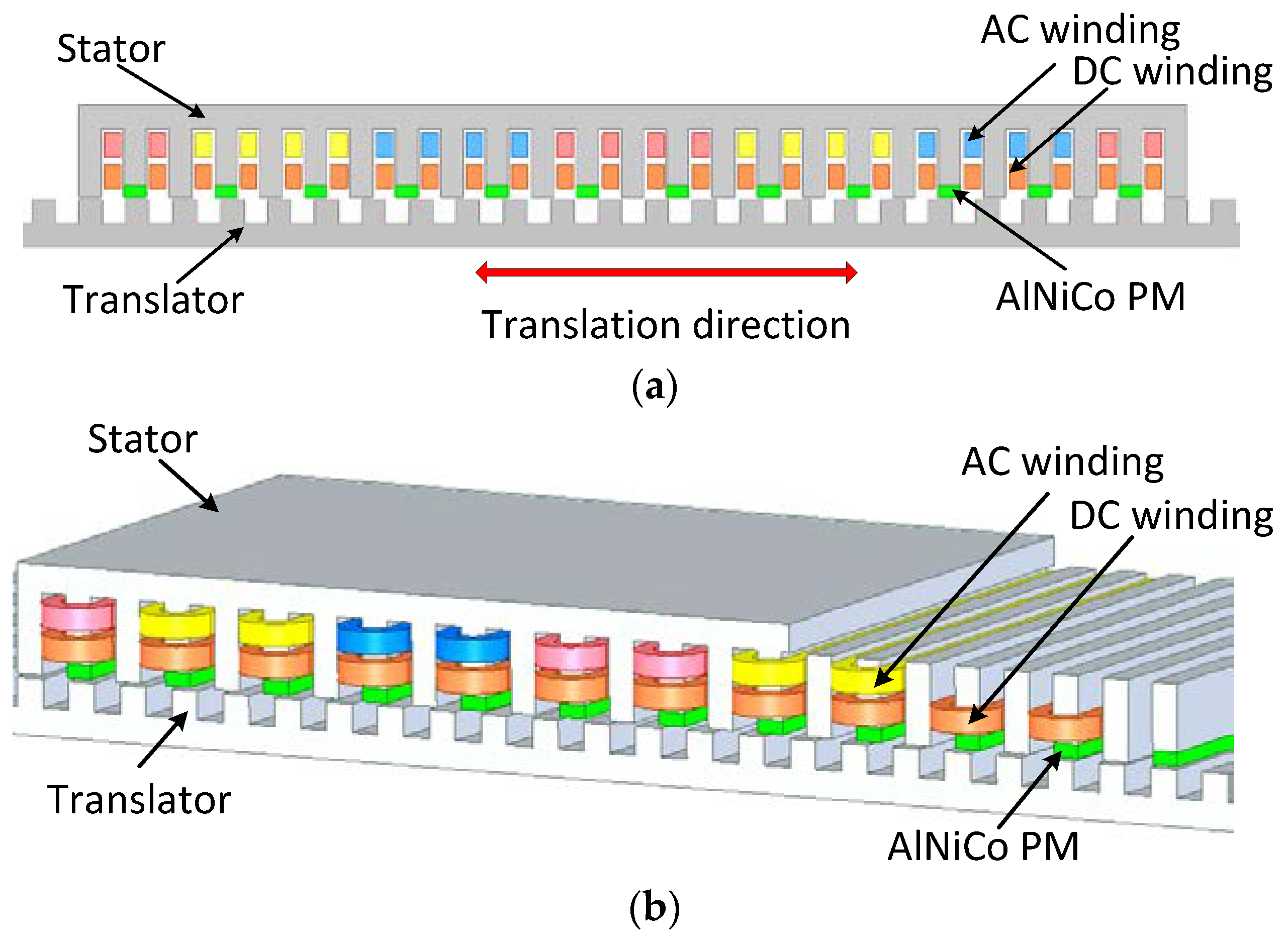
2. Proposed Machine Configuration and Operation Principle
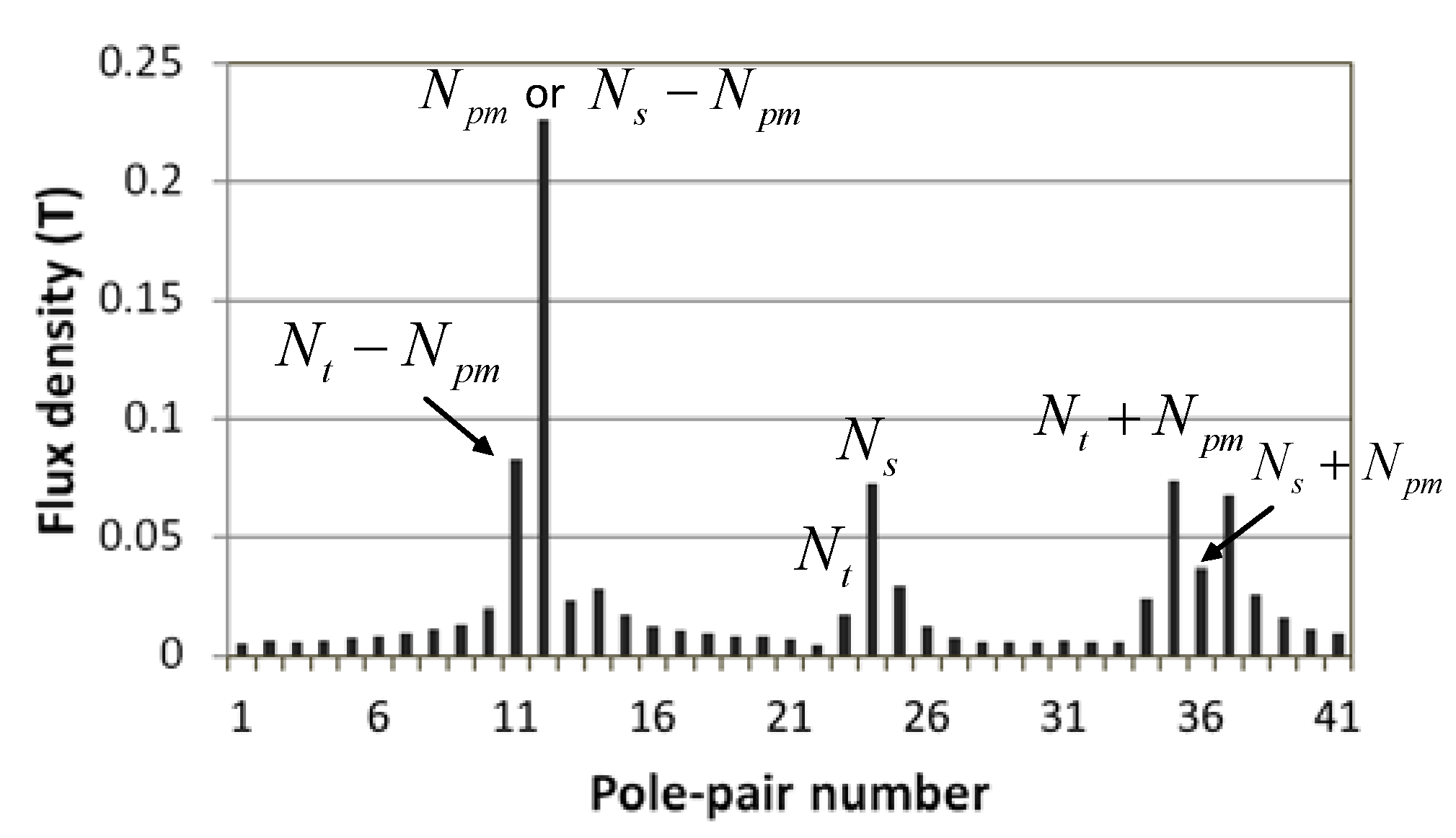
2.1. Flux Modulation
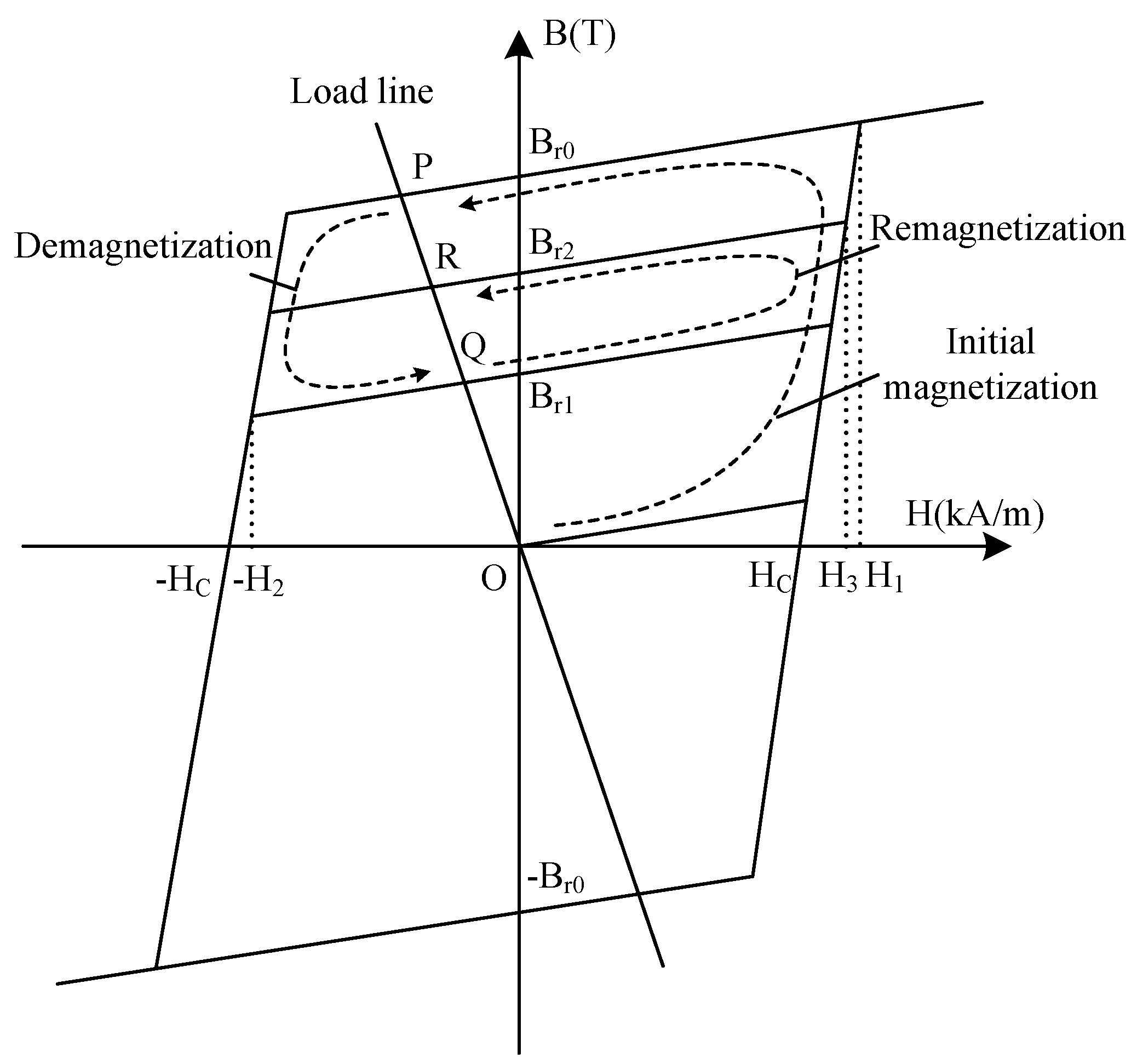
2.2. Mnemonic Flux
3. Design Considerations
- (1)
- The current density in the winding conductors was 4 A/mm2 and the slot fill factor was 50%. As the magnetization current pulse was very short and its copper losses can be ignored, the DC winding needed only a small part of the slot area (10% in this design).
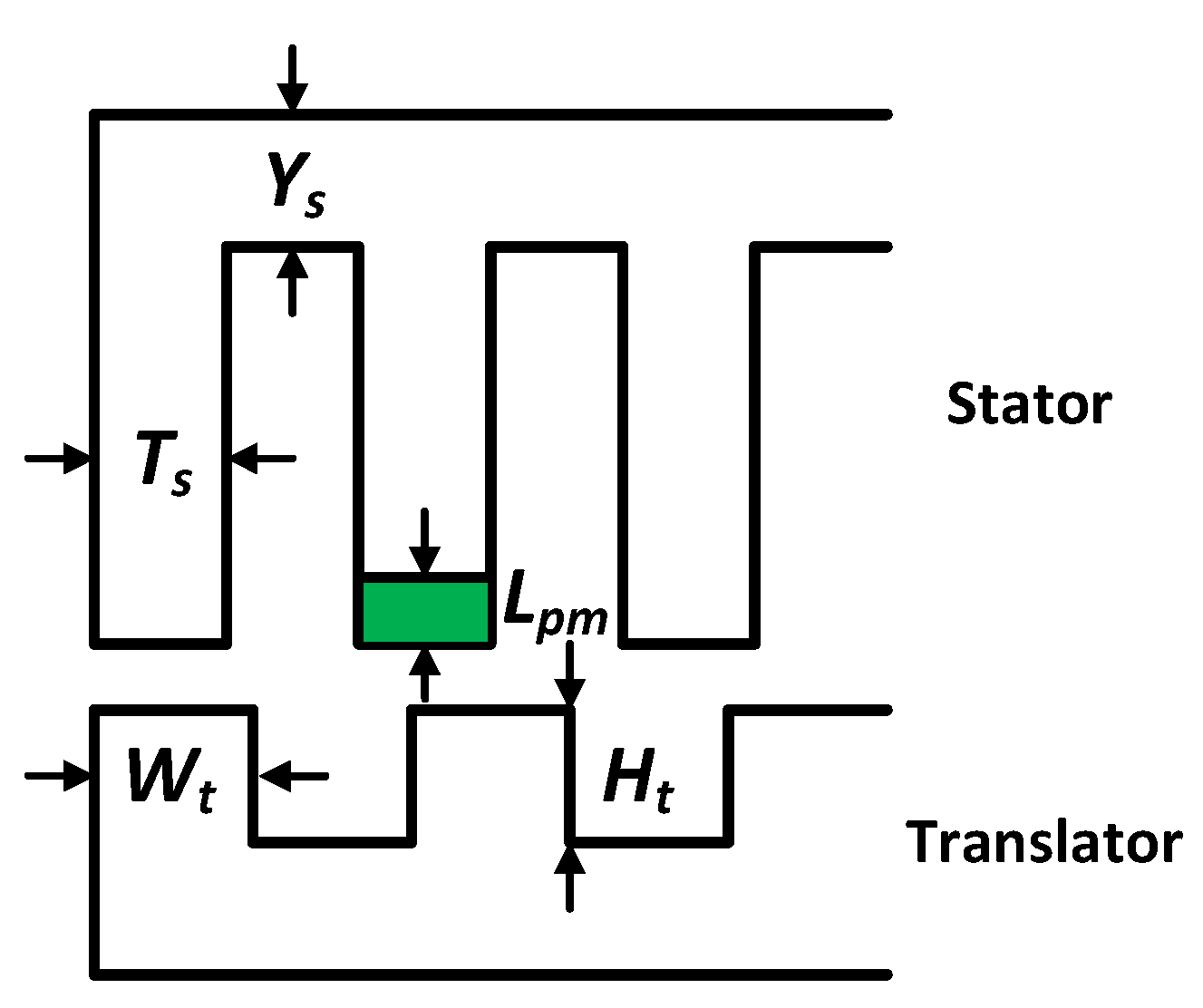
- (2)
- The stator yoke height YS, the stator teeth width TS, the PM length Lpm, the translator teeth width Wt, and the translator teeth height Ht were considered in the analysis, as shown in Figure 4. The initial values were as follows: YS = 4 mm, TS = 5 mm, Lpm = 2 mm, Wt = 5 mm, and Ht = 5 mm. When one variable was under analysis, the other variables were fixed at their initial values.
4. Performance Analysis
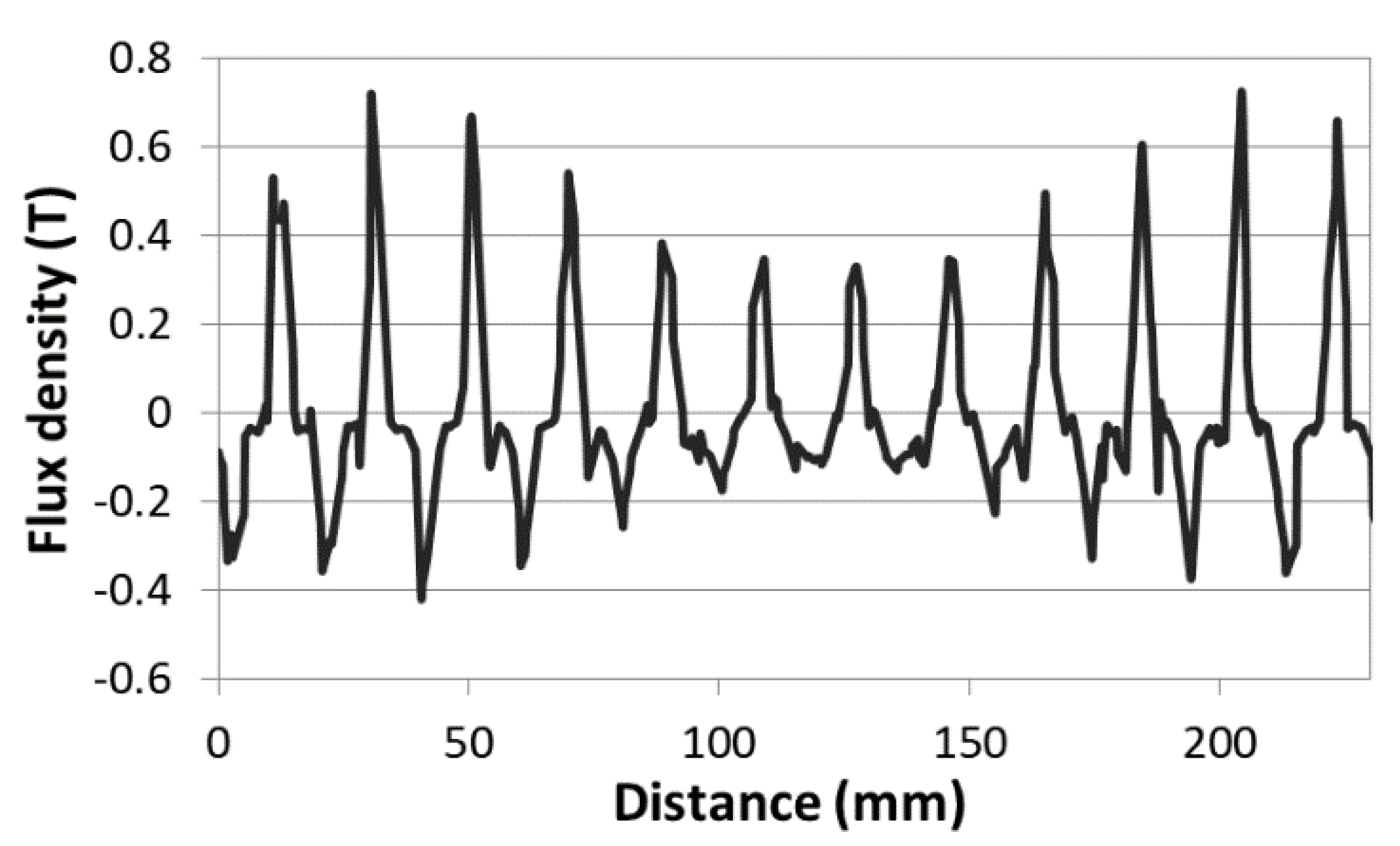
4.1. Field Analysis
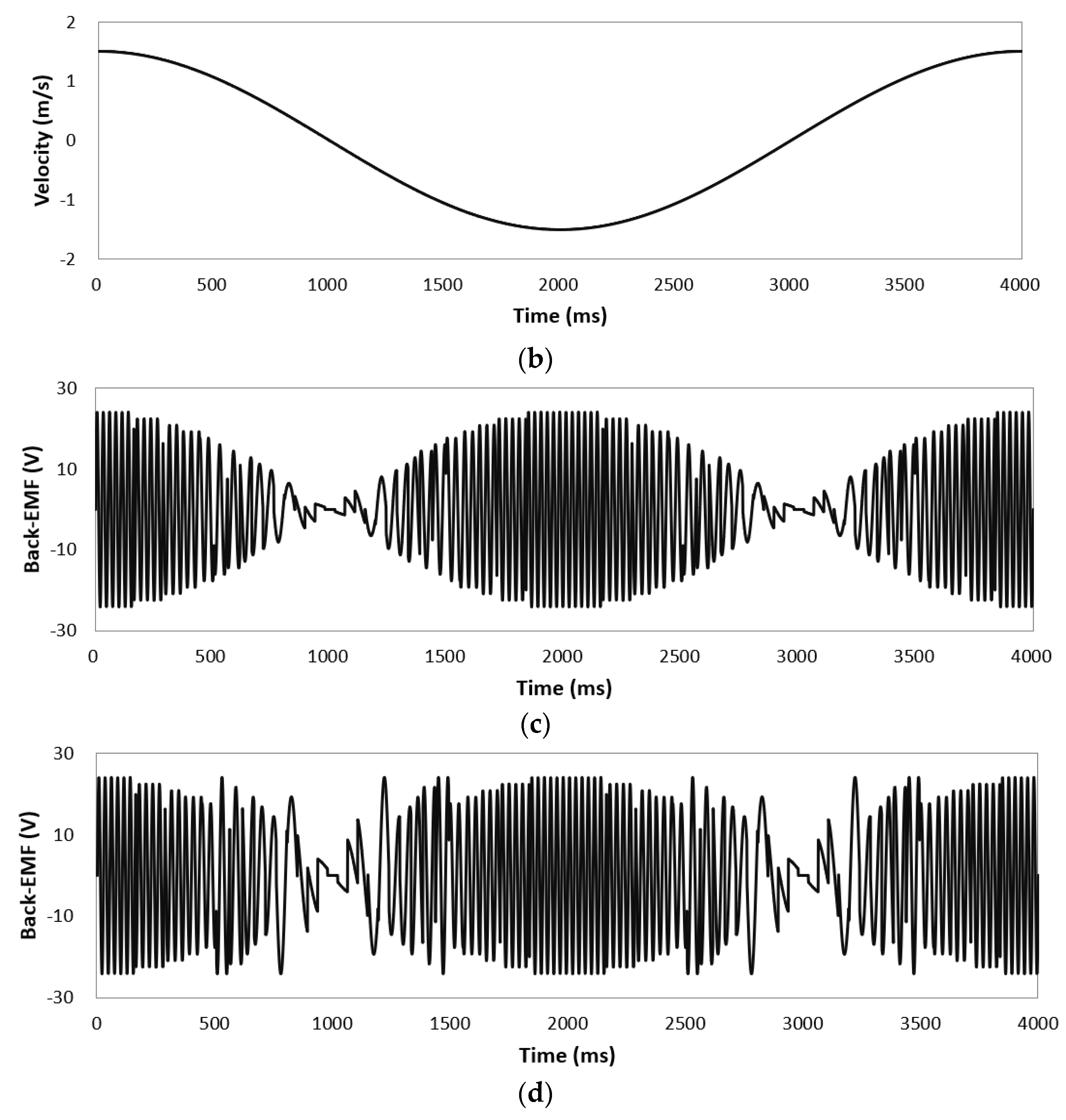
4.2. Flux Regulation
4.3. Electromagnetic Force and Efficiency
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Melikoglu, M. Current status and future of ocean energy sources: A global review. Ocean Eng. 2018, 148, 563–573. [Google Scholar] [CrossRef]
- Saeed, O.; Wahyudie, A.; Susilo, T.B.; Shareef, H. Simple resonance circuit to improve electrical power conversion in a two-sided planar permanent magnet linear generator for wave energy converters. IEEE Access 2017, 5, 18654–18664. [Google Scholar] [CrossRef]
- Elhanafi, A.; Macfarlane, G.; Fleming, A.; Leong, Z. Scaling and air compressibility effects on a three-dimensional offshore stationary OWC wave energy converter. Appl. Energy 2017, 189, 1–20. [Google Scholar] [CrossRef]
- Gunawardane, S.P.; Kankanamge, C.J.; Watabe, T. Study on the performance of the “Pendulor” wave energy converter in an array configuration. Energies 2016, 9, 282. [Google Scholar] [CrossRef] [Green Version]
- Henderson, R. Design, simulation, and testing of a novel hydraulic power take-off system for the Pelamis wave energy converter. Renew. Energy 2006, 31, 271–283. [Google Scholar] [CrossRef]
- Tedd, J.; Kofoed, J.P. Measurements of overtopping flow time series on the Wave Dragon, wave energy converter. Renew. Energy 2009, 34, 711–717. [Google Scholar] [CrossRef]
- Polinder, H.; Damen, M.E.C.; Gardner, F. Linear PM generator system for wave energy conversion in the AWS. IEEE Trans. Energy Convers. 2004, 19, 583–589. [Google Scholar] [CrossRef] [Green Version]
- Leijon, M.; Bernhoff, H.; Agren, O.; Isberg, J.; Sundberg, J.; Berg, M.; Karlsson, K.E.; Wolfbrandt, A. Multiphysics simulation of wave energy to electric energy conversion by permanent magnet linear generator. IEEE Trans. Energy Convers. 2005, 20, 219–224. [Google Scholar] [CrossRef]
- Hong, Y.; Eriksson, M.; Castellucci, V.; Boström, C.; Waters, R. Linear generator-based wave energy converter model with experimental verification and three loading strategies. IET Renew. Power Gener. 2016, 10, 349–359. [Google Scholar] [CrossRef] [Green Version]
- Manuel, G.; Adolfo, U.; Almudena, F.; Julien, M.; Paolo, G. Chapter 6—Marine Dynamics. In Oceanography and Marine Environment of the Basque Country; Elsevier: Amsterdam, The Netherlands, 2004; Volume 70, pp. 133–157. [Google Scholar]
- Mackay, E.B.L. Chapter 8.03—Resource Assessment for Wave Energy. In Comprehensive Renewable Energy; Elsevier: Amsterdam, The Netherlands, 2012; Volume 8, pp. 11–77. [Google Scholar]
- Muetze, A.; Vining, J.G. Ocean Wave Energy Conversion—A Survey. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006. [Google Scholar]
- Ostovic, V. Memory motor—A new class of controllable flux PM machines for a true wide speed operation. IEEE Ind. Appl. Mag. 2003, 9, 52–61. [Google Scholar] [CrossRef]
- Gong, Y.; Chau, K.T.; Jiang, J.Z.; Yu, C.; Li, W. Analysis of doubly salient memory motors using Preisach theory. IEEE Trans. Magn. 2009, 45, 4676–4679. [Google Scholar] [CrossRef] [Green Version]
- Maekawa, S.; Kazuaki, Y.; Makoto, M.; Isamu, N.; Yukihisa, H.; Tsuyoshi, S.; Tsuyoshi, H.; Kazunobu, N.; Hisao, K. Study of the magnetization method suitable for fractional-slot concentrated winding variable magnetomotive force memory motor. IEEE Trans. Power Electron. 2014, 29, 4877–4887. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Qiu, C. Design and analysis of a new magnetic-geared memory machine. IEEE Trans. Appl. Supercond. 2014, 24, 0503005. [Google Scholar]
- Wang, Q.; Niu, S. Electromagnetic design and analysis of a novel fault-tolerant flux-modulated memory machine. Energies 2015, 8, 8069–8085. [Google Scholar] [CrossRef] [Green Version]
- Fan, Y.; Zhang, L.; Cheng, M.; Chau, K.T. Sensorless SVPWM-FADTC of a New Flux-Modulated Permanent-Magnet Wheel Motor Based on a Wide-Speed Sliding Mode Observer. IEEE Trans. Ind. Electron. 2015, 62, 3143–3151. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Niu, S.; Fu, W.N. Design of an Electrical Continuously Variable Transmission Based Wind Energy Conversion System. IEEE Trans. Ind. Electron. 2016, 63, 6745–6755. [Google Scholar] [CrossRef]
- Liu, Y.; Niu, S.; Fu, W.N. A Novel Multi-Phase Brushless Power Split Transmission System for Wind Power Generation. IEEE Trans. Magn. 2016, 52, 8100907. [Google Scholar] [CrossRef]
- Tyrberg, S.; Svensson, O.; Kurupath, V.; Engström, J.; Strömstedt, E.; Leijon, M. Wave buoy and translator motions—on-site measurements and simulations. IEEE J. Ocean. Eng. 2011, 36, 377–385. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of phases | 3 |
| Stator length | 230 mm |
| Stator tooth pitch | 230/24 mm |
| Stator height | 30 mm |
| Translator pole pitch | 10 mm |
| Translator height | 10 mm |
| Airgap length | 0.6 mm |
| Stack length | 100 mm |
| Number of active translator teeth | 23 |
| AC winding pole-pairs | 11 |
| DC winding poles | 12 |
| PM poles | 12 |
| PM material | AlNiCo |
| PM remanence | 1.2 T |
| Translator Velocity | Magnetization Level | PM Remanence |
|---|---|---|
| <0.5 m/s | 100% | 1.2 T |
| 0.5–1 m/s | 50% | 0.6 T |
| >1 m/s | 33% | 0.4 T |
| Translator Velocity | Parameter | Proposed Machine with Flux Regulation | Comparison Machine without Flux Regulation |
|---|---|---|---|
| 1.5 m/s | PM remanence (T) | 0.4 | 1.2 |
| Induced voltage (V) | 35.3 | 32.7 | |
| Output power (W) | 211.8 | 215.8 | |
| Copper loss (W) | 36.2 | 8.1 | |
| Iron loss (W) | 11.9 | 12.1 | |
| Efficiency (%) | 81.5 | 91.4 | |
| 1.0 m/s | PM remanence (T) | 0.6 | 1.2 |
| Induced voltage (V) | 33.9 | 12.6 | |
| Output power (W) | 203.4 | 52.9 | |
| Copper loss (W) | 34.7 | 3.3 | |
| Iron loss (W) | 6.2 | 7.8 | |
| Efficiency (%) | 83.3 | 82.6 | |
| 0.5 m/s | PM remanence (T) | 1.2 | 1.2 |
| Induced voltage (V) | 33.2 | 4.2 | |
| Output power (W) | 199.2 | 8.82 | |
| Copper loss (W) | 34 | 0.8 | |
| Iron loss (W) | 2.3 | 3.4 | |
| Efficiency (%) | 84.6 | 67.7 | |
| Coil turns | 30 | 10 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhang, X.; Niu, S.; Fu, W.; Guo, X. Design and Analysis of a Linear Memory Machine for Ocean Wave Power Generation. Energies 2020, 13, 5216. https://doi.org/10.3390/en13195216
Liu Y, Zhang X, Niu S, Fu W, Guo X. Design and Analysis of a Linear Memory Machine for Ocean Wave Power Generation. Energies. 2020; 13(19):5216. https://doi.org/10.3390/en13195216
Chicago/Turabian StyleLiu, Yulong, Xiaodong Zhang, Shuangxia Niu, Weinong Fu, and Xinhua Guo. 2020. "Design and Analysis of a Linear Memory Machine for Ocean Wave Power Generation" Energies 13, no. 19: 5216. https://doi.org/10.3390/en13195216