Development and Validation of CFD 2D Models for the Simulation of Micro H-Darrieus Turbines Subjected to High Boundary Layer Instabilities †


Abstract
:1. Introduction
2. Numerical Model and Experimental Setup
2.1. Literature Background
2.2. Computational Domain and Experimental Setup
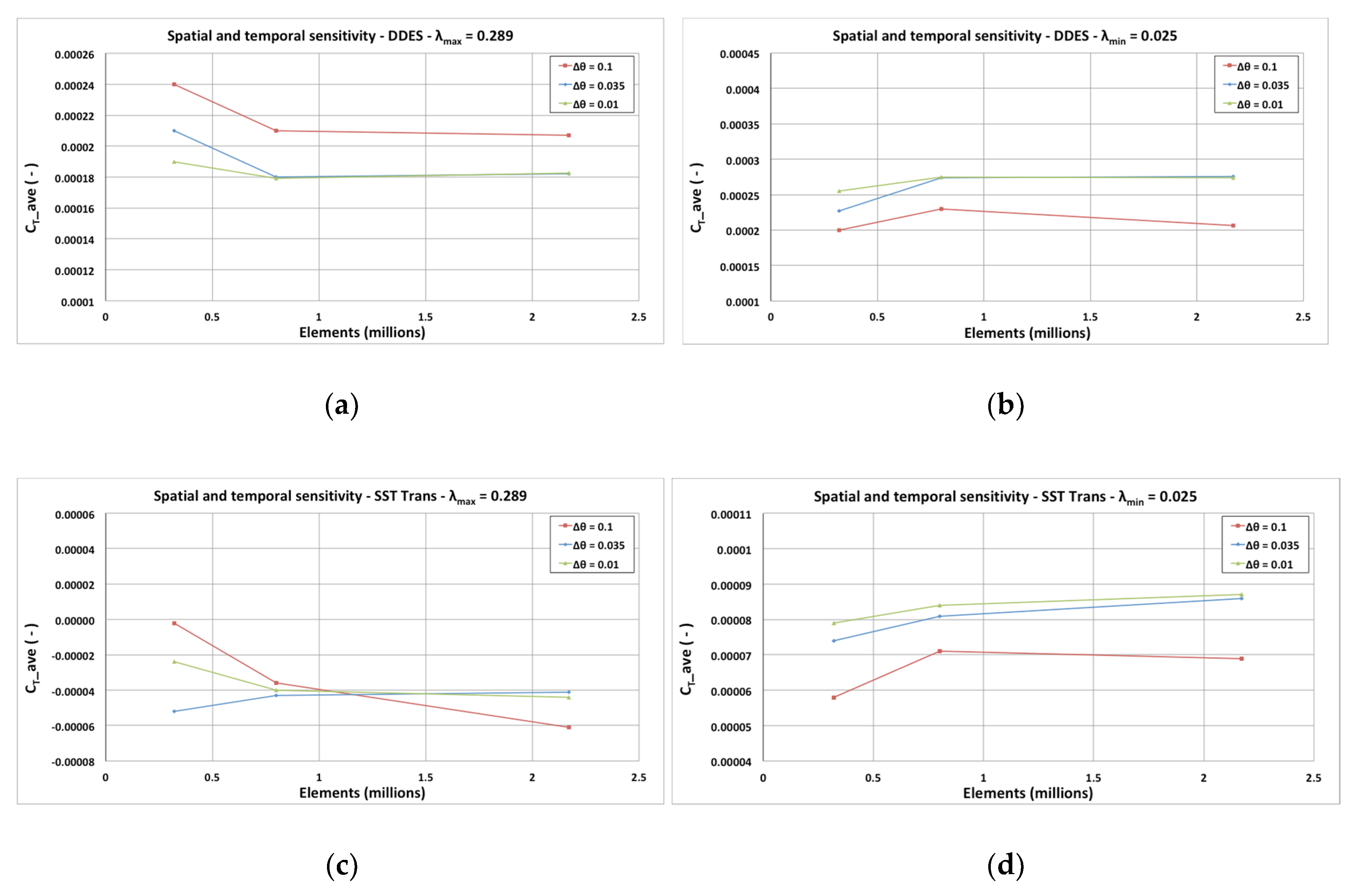
2.3. Spatial and Temporal Sensitivity Study
2.4. CFD SOLVER Settings
3. Model Validation and Analysis of the Results
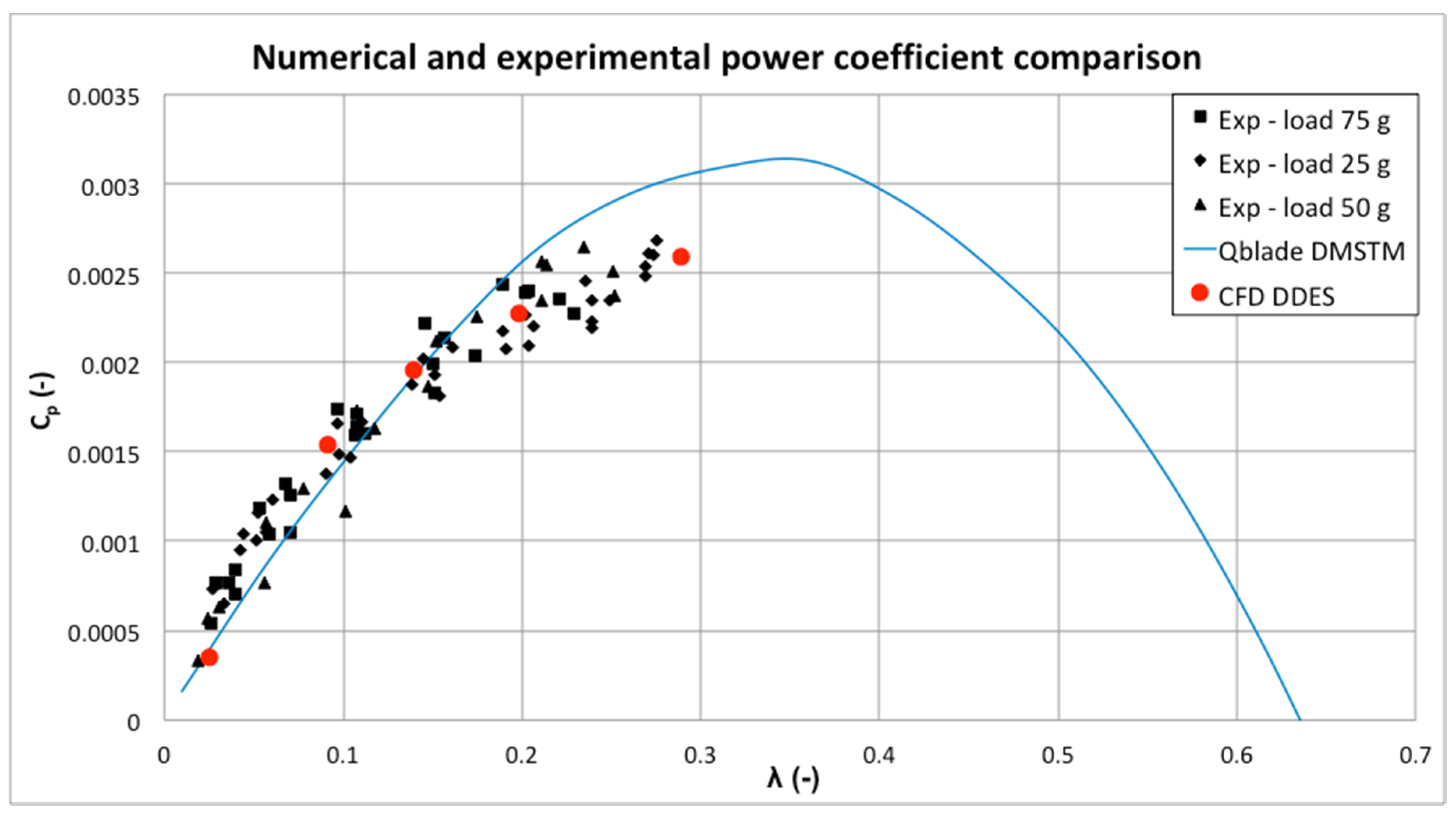
3.1. Experimental Validation of the CFD Model
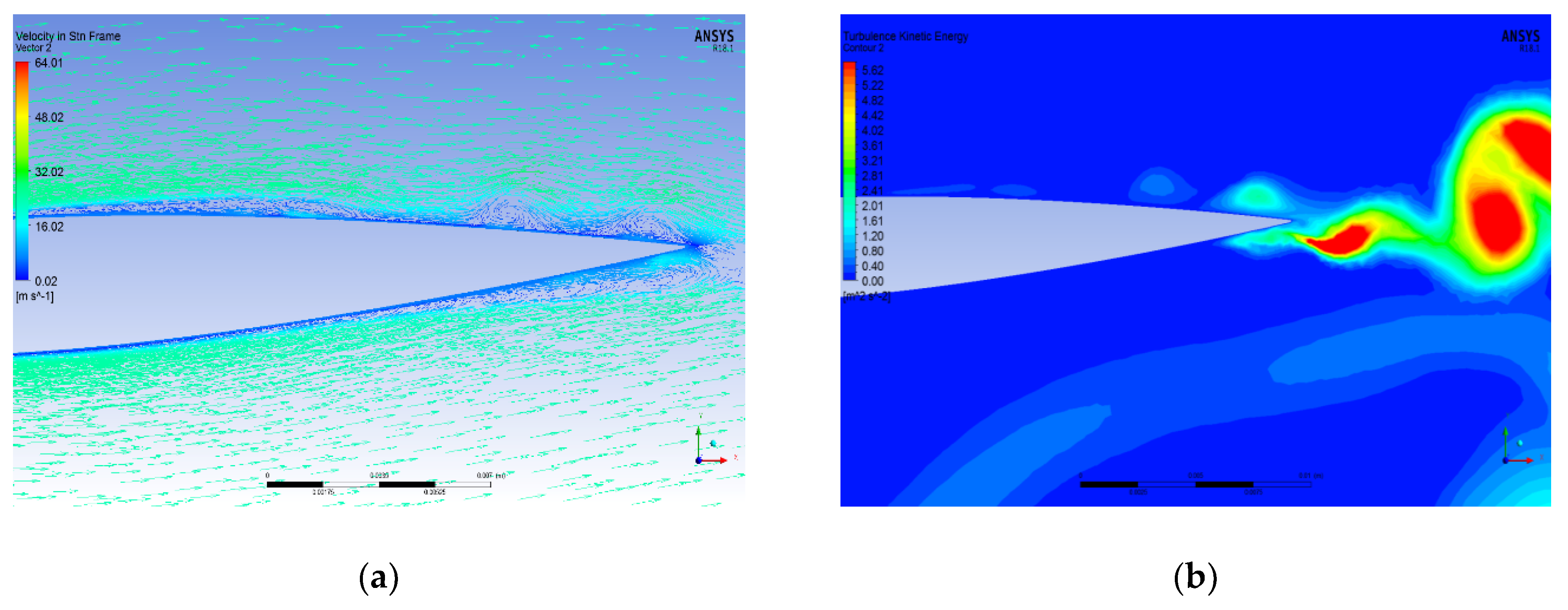
3.2. Post-Processing and Analysis of the Results
4. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xu, F.J.; Yuan, F.-G.; Liu, L.; Hu, J.Z.; Qiu, Y.P. Performance Prediction and Demonstration of a Miniature Horizontal Axis Wind Turbine. J. Energy Eng. 2013, 139, 143–152. [Google Scholar] [CrossRef]
- Kishore, R.A.; Coudron, T.; Priya, S. Small-scale wind energy portable wind turbine (SWEPT). J. Wind Eng. Ind. Aerodyn. 2013, 116, 21–31. [Google Scholar] [CrossRef] [Green Version]
- Kishore, R.A.; Priya, S. Design and eperimental verification of a high efficiencysmall wind energy portable turbine (SWEPT). J. Wind Eng. Ind. Aerodyn. 2013, 118, 12–19. [Google Scholar] [CrossRef]
- Zakaria, M.Y.; Pereira, D.A.; Hajj, M.R. Experimental investigation and performance modeling of centimeter-scale micro-wind turbine energy harvesters. J. Wind Eng. Ind. Aerodyn. 2015, 147, 58–65. [Google Scholar] [CrossRef]
- Xu, F.J.; Yuan, F.G.; Hu, J.Z.; Qiu, Y.P. Miniature horizontal axis wind turbine system for multipurpose application. Energy 2014, 75, 216–224. [Google Scholar] [CrossRef]
- Ionescu, R.D.; Szava, I.; Vlase, S.; Ivanoiu, M.; Munteanu, R. Innovative solutions for portable wind turbines, used on ships. Procedia Technol. 2015, 19, 722–729. [Google Scholar] [CrossRef]
- Leung, D.Y.C.; Deng, Y.; Leung, M.K.H. Design Optimization of a Cost-Effective Micro Wind Turbine. In Proceedings of the World Congress on Engineering (WCE 2010), London, UK, 30 June–2 July 2010; Volume 2, pp. 988–993. [Google Scholar] [CrossRef] [Green Version]
- Howey, D.A.; Bansal, A.; Holmes, A.S. Design and performance of a cm-scale shrouded wind turbine for energy harvesting. Smart Mater. Struct. 2011, 20, 85021. [Google Scholar] [CrossRef] [Green Version]
- Park, J.W.; Jung, H.-J.; Jo, H.; Spencer, B.F., Jr. Feasibility Study of Micro-Wind Turbines for Powering Wireless Sensors on a Cable-Stayed Bridge. Energies 2012, 5, 3450–3464. [Google Scholar] [CrossRef] [Green Version]
- Bastankhah, M.; Porté-Agel, F. A New Miniature Wind Turbine for Wind Tunnel Experiments. Part I: Design and Performance. Energies 2017, 10, 908. [Google Scholar] [CrossRef] [Green Version]
- Lanzafame, R.; Mauro, S.; Messina, M. Numerical and experimental analysis of micro HAWTs designed for wind tunnel applications. Int. J. Energy Environ. Eng. 2016, 7, 199. [Google Scholar] [CrossRef] [Green Version]
- Mutlu, Y.; Çakan, M. Evaluation of in-pipe turbine performance for turbo solenoid valve system. Eng. Appl. Comput. Fluid Mech. 2018, 12, 625–634. [Google Scholar] [CrossRef]
- Balduzzi, F.; Bianchini, A.; Maleci, R.; Ferrera, G.; Ferrari, L. Critical issues in the CFD simulation of Darrieus wind turbines. Renew. Energy 2016, 85, 419–435. [Google Scholar] [CrossRef]
- Balduzzi, F.; Bianchini, A.; Ferrara, G.; Ferrari, L. Dimensionless numbers for the assessment of the mesh and timestep requirements in CFD simulations of Darrieus wind turbines. Energy 2016, 97, 246–261. [Google Scholar] [CrossRef]
- Bianchini, A.; Balduzzi, F.; Bachant, P.; Ferrara, G.; Ferrari, L. Effectiveness of two-dimensional CFD simulations for Darrius VAWTs: A combined numerical and experimental assessment. Energy Convers. Manag. 2017, 136, 318–328. [Google Scholar] [CrossRef]
- Rezaeiha, A.; Kalkman, I.; Blocken, B. CFD simulation of a vertical axis wind turbine operating at a moderate tip speed ratio: Guidelines for minimum domain size and azimuthal increment. Renew. Energy 2017, 107, 373–385. [Google Scholar] [CrossRef] [Green Version]
- Castelli, M.R.; Ardizzon, G.; Battisti, L.; Benini, E.; Pavesi, G. Modeling strategy for a Darrieus vertical axis micro-wind turbine. In Proceedings of the ASME 2010 International Mechanical Engineering Congress & Exposition IMECE2010-39548, Vancouver, BC, Canada, 12–18 November 2010; pp. 409–418. [Google Scholar] [CrossRef]
- Rogowski, K.; Hansen, M.O.L.; Lichota, P. 2-D CFD Computations of the Two-Bladed Darrius-Type Wind Turbine. J. Appl. Fluid Mech. 2018, 11, 835–845. [Google Scholar] [CrossRef]
- Bangga, G.; Huotomo, G.; Wiranegara, R.; Sasongko, H. Numerical study on a single bladed vertical axis wind turbine under dynamic stall. J. Mech. Sci. Technol. 2017, 31, 261–267. [Google Scholar] [CrossRef]
- Lanzafame, R.; Mauro, S.; Messina, M. 2D CFD modeling of H-Darrieus wind turbines using a transition turbulence model. Energy Procedia 2014, 45, 131–140. [Google Scholar] [CrossRef] [Green Version]
- Mannion, B.; Leen, S.B.; Nash, S. A two and three-dimensional CFD investigation into performance prediction and wake characterization of a vertical axis turbine. J. Renew. Sustain. Energy 2018, 10, 34503. [Google Scholar] [CrossRef]
- Lei, H.; Zhou, D.; Bao, Y.; Li, Y.; Han, Z. Three-dimensional Improved Delayed Detached Eddy Simulation of a two-bladed vertical axis wind turbine. Energy Convers. Manag. 2017, 133, 235–248. [Google Scholar] [CrossRef]
- Li, C.; Xiao, Y.; Xu, Y.; Peng, Y.; Hu, G.; Zhu, S. Optimization of blade pitch in H-rotor vertical axis wind turbines through computational fluid dynamics simulations. Appl. Energy 2018, 212, 1107–1125. [Google Scholar] [CrossRef]
- Thé, J.; Yu, H. A critical review on the simulations of wind turbine aerodynamics focusing on hybrid RANS-LES methods. Energy 2017, 138, 257–289. [Google Scholar] [CrossRef]
- Ferreira, C.J.S.; Bijl, H.; van Bussel, G.; van Kuik, G. Simulating Dynamic Stall in a 2D VAWT: Modeling strategy, verification and validation with Particle Image Velocimetry data. J. Phys. Conf. Ser. 2007, 75, 12023. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, C.J.S.; van Zuijlen, A.; Bijl, H.; van Bussel, G.; van Kuik, G. Simulating dynamic stall in a two-dimensional vertical-axis wind turbine: Verification and validation with particle image velocimetry data. Wind Energ. 2010, 13, 1–17. [Google Scholar] [CrossRef]
- Elkhoury, M.; Kiwata, T.; Nagao, K.; Kono, T.; Elhajj, F. Wind tunnel experiments and Delayed Detached Eddy Simulation of a three-bladed micro vertical axis wind turbine. Renew. Energy 2018, 129, 63–74. [Google Scholar] [CrossRef]
- Abdellah, B.; Belkheir, N.; Khelladi, S. Effect of Computational Grid on Prediction of a Vertical axis Wind turbine Rotor Using Delayed Detached-Eddy Simulations. In Proceedings of the 2018 International Conference on Wind Energy and Applications in Algeria (ICWEAA), Algiers, Algeria, 6–7 November 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, S.; Ingham, D.B.; Ma, L.; Pourkashanian, M.; Tao, Z. Turbulence modeling of deep dynamic stall at relatively low Reynolds number. J. Fluids Struct. 2012, 33, 191–209. [Google Scholar] [CrossRef]
- Sa, J.H.; Park, S.H.; Kim, C.J.; Park, J.K. Low-Reynolds number flow computation for eppler 387 wing using hybrid DES/transition model. J. Mech. Sci. Technol. 2015, 29, 1837–1847. [Google Scholar] [CrossRef]
- Menter, F.R.; Langtry, R.; Volker, S. Transition modeling for general purpose CFD codes. Flow Turb. Combust. 2006, 77, 277–303. [Google Scholar] [CrossRef]
- Langtry, R.B.; Menter, F.R.; Likki, S.R.; Suzen, Y.B.; Huang, P.G.; Volker, S. A Correlation-Based Transition Model Using Local Variables—Part I: Model Formulation. In Proceedings of the ASME Turbo Expo 2004: Power for Land, Sea, and Air, Vienna, Austria, 14–17 June 2004. [Google Scholar]
- Langtry, R.B.; Menter, F.R.; Likki, S.R.; Suzen, Y.B.; Huang, P.G.; Volker, S. A correlation-based transition model using local variables—Part II: Test cases and industrial applications. ASME J. Turbomach. 2006, 128, 423–434. [Google Scholar] [CrossRef]
- Brusca, S.; Lanzafame, R.; Messina, M. Low speed wind tunnel: Design and build. In Wind Tunnels: Aerodynamics, Models and Experiments; Pereira, J.D., Ed.; Nova Science Publishers, Inc.: Hauppauge, NY, USA, 2011; ISBN 978-1-61209-204-1. [Google Scholar]
- Spalart, P.R. Young-Person’s Guide to Detached-Eddy Simulation Grids; NASA/CR-2001-211032; NASA Langley Research Center: Hampton, VA, USA, 2001.
- Mauro, S.; Lanzafame, R.; Messina, M.; Pirrello, D. Transition turbulence model calibration for wind turbine airfoil characterization through the use of a Micro-Genetic Algorithm. Int. J. Energy Environ. Eng. 2017, 8, 359–374. [Google Scholar] [CrossRef] [Green Version]
- Marten, D.; Wendler, J.; Pechlivanoglou, G.; Nayeri, C.N.; Paschereit, C.O. Qblade: An open source tool for design and simulation of horizontal and vertical axis wind turbines. Int. J. Emerg. Technol. Adv. Eng. 2013, 3, 264–269. [Google Scholar]
- Shedahl, R.E.; Klimas, P.C. Aerodynamic Characteristics of Seven Symmetrical Airfoil Sections through 180-Degree Angle of Attack for Use in Aerodynamic Analysis of Vertical Axis Wind Turbines; Technical Report No. SAND80-2114; Sandia National Laboratories: Albuquerque, NM, USA, 1981.
- Lanzafame, R.; Mauro, S.; Messina, M. HAWT design and performance evaluation: Improving the BEM therory mathematical models. Energy Procedia 2015, 82, 172–179. [Google Scholar] [CrossRef] [Green Version]
- Mauro, S.; Brusca, S.; Lanzafame, R.; Messina, M. Micro H-Darrieus wind turbines: CFD modeling and experimental validation. AIP Conf. Proc. 2019, 2191. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometrical and Experimental Details | |
|---|---|
| Diameter (m) | 0.2 |
| Height (m) | 0.2 |
| Cord (m) | 0.03 |
| Number of blades | 4 |
| Solidity | 0.19 |
| Blade airfoil | NACA 0012 |
| Pitch (deg) | 0 |
| Shaft diameter (m) | 0.01 |
| Maximum Re | ~50,000 |
| Bearings | 2 Needle Roller Bearings |
| Flow speed range (m/s) | 11–21 |
| Rotational speed range (r/min) | 27–580 |
| Tip speed ratio range | 0.025–0.29 |
| Blade attachment point | ¼ chord length from LE |
| Grid Features | Mesh M1 | Mesh M2 | Mesh M3 |
|---|---|---|---|
| Number of elements | 320,000 | 800,000 | 2,170,000 |
| Nodes on airfoil | 1000 | 2000 | 4000 |
| Max rotating domain sizing | 0.75 mm | 0.5 mm | 0.25 mm |
| Max inner circle sizing | 0.75 mm | 0.5 mm | 0.25 mm |
| Max outer domain sizing | 10 mm | 10 mm | 10 mm |
| Global growth rate | 1.2 | 1.1 | 1.05 |
| Inflation layers | 20 | 40 | 60 |
| First layer height | 10−3 mm | 10−3 mm | 10−3 mm |
| Skewness max | 0.77 | 0.72 | 0.79 |
| Y+ max | 0.25 | 0.23 | 0.22 |
| Δθ (deg) | Δt (s) | Δx (mm) | λ (-) | ||
|---|---|---|---|---|---|
| 0.03 (M1) | 0.015 (M2) | 0.0075 (M3) | |||
| Co (-) | |||||
| 0.1 | 0.00003 | 6.07 | 12.15 | 24.29 | 0.29 |
| 0.035 | 0.00001 | 2.02 | 4.05 | 8.10 | |
| 0.01 | 0.000003 | 0.61 | 1.21 | 2.43 | |
| 0.1 | 0.00062 | 5.84 | 11.69 | 23.37 | 0.025 |
| 0.035 | 0.00021 | 1.98 | 3.96 | 7.92 | |
| 0.01 | 0.000062 | 0.58 | 1.17 | 2.34 | |
| Solver | ANSYS Fluent—Transient—Coupled | ||
|---|---|---|---|
| Turbulence models | URANS Transition SST URANS SST k-ω Delayed DES with Transition SST | ||
| Numerical schemes | Least squares cell based for gradients Second order upwind for all the equations Bounded central differencing for momentum in DDES Second order implicit for time differencing in URANS Bounded second order implicit for time differencing in DDES | ||
| Rotation model | Sliding Mesh Model | ||
| Iterations per time step | 60 | ||
| Turbulence boundary conditions | Inlet: TI = 0.1%, TVR = 10 Outlet: TI = 5%, TVR = 10 | ||
| Convergence criterion | Average torque coefficient variation lower than 0.1% between two subsequent revolutions | ||
| Simulated operating conditions | Vw = 11.1 m/s | n = 27 r/min | λ = 0.025 |
| Vw = 15.2 m/s | n = 133 r/min | λ = 0.092 | |
| Vw = 17 m/s | n = 227 r/min | λ = 0.14 | |
| Vw = 19.1 m/s | n = 362 r/min | λ = 0.198 | |
| Vw = 21 m/s | n = 580 r/min | λ = 0.29 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lanzafame, R.; Mauro, S.; Messina, M.; Brusca, S. Development and Validation of CFD 2D Models for the Simulation of Micro H-Darrieus Turbines Subjected to High Boundary Layer Instabilities. Energies 2020, 13, 5564. https://doi.org/10.3390/en13215564
Lanzafame R, Mauro S, Messina M, Brusca S. Development and Validation of CFD 2D Models for the Simulation of Micro H-Darrieus Turbines Subjected to High Boundary Layer Instabilities. Energies. 2020; 13(21):5564. https://doi.org/10.3390/en13215564
Chicago/Turabian StyleLanzafame, Rosario, Stefano Mauro, Michele Messina, and Sebastian Brusca. 2020. "Development and Validation of CFD 2D Models for the Simulation of Micro H-Darrieus Turbines Subjected to High Boundary Layer Instabilities" Energies 13, no. 21: 5564. https://doi.org/10.3390/en13215564