A Review on Power Electronics Technologies for Electric Mobility

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Power Electronics for Road Electric Vehicles
2.1. Power Electronics for Battery Charging Systems
2.1.1. On-Board Battery Charging Systems
2.1.2. Off-Board Battery Charging Systems
2.1.3. Auxiliary Battery Charging Systems
2.2. Inductive Wireless Battery Charging
2.2.1. Principles of Inductive Wireless Power Transfer
2.2.2. Frequency Splitting in Serial-Serial (SS)-Compensation Topology
2.2.3. Other Circuit Compensation Topologies
2.2.4. Power Electronics Topologies for Inductive Wireless Power Transfer (IWPT)
2.2.5. Stationary Battery Charging of Electric Vehicles with IWPT
2.2.6. Limiting Human Exposure to Electromagnetic Fields (EMF) in IWPT Systems
2.2.7. Dynamic Inductive Wireless Power Transfer
2.3. Power Electronics for Traction Systems
2.4. Unified Systems for Traction and Battery Charging
2.5. Summary
3. Power Electronics for Railway Systems
3.1. Power Quality Compensators
3.2. Power Management Converters
3.3. Traction and Regenerative Braking Converters
3.4. Special Power Electronics Applications in Electrified Railways
3.5. Summary
4. Power Electronics for Other Types of Electric Vehicle
4.1. Electric Ships
4.2. Electric Aircraft
4.3. Electric Trucks
4.4. Electric Buses
4.5. Electric Pallet Trucks and Forklifts
4.6. Electric Motorcycles/Scooters
4.7. Electric Bicycles
4.8. Other Small Electric Vehicles
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations and Acronyms
| BLDC | Brushless dc |
| CC-CV | Constant Current—Constant Voltage |
| CO2 | Carbon Dioxide |
| DIWPT | Dynamic Inductive Wireless Power Transfer |
| EV | Electric Vehicle |
| EVBC | EV Battery Charger |
| G2V | Grid-to-Vehicle |
| GA | Ground Assembly |
| ICE | Internal Combustion Engine |
| ICNIRP | International Commission on Non-Ionizing Radiation Protection |
| IGBT | Insulated Gate Bipolar Transistor |
| IMD | Implanted Medical Device |
| IWPT | Inductive Wireless Power Transfer |
| LV | Low-Voltage |
| MOSFET | Metal Oxide Semiconductor Field Effect Transistor |
| MMC | Modular Multilevel Converter |
| MV | Medium-Voltage |
| OLEV | On-Line Electric Vehicle |
| PMSM | Permanent Magnet Synchronous Machines |
| PP | Parallel-Parallel |
| PS | Parallel-Series |
| PWM | Pulse-Width Modulation |
| RB-IGBT | Reverse-Blocking Insulated Gate Bipolar Transistor |
| RPC | Rail Power Conditioner |
| SAE | Society of Automotive Engineers |
| SiC | Silicon Carbide |
| SP | Series-Parallel |
| SS | Series-Serial |
| STATCOM | Static Synchronous Compensator |
| TPS | Traction Power System |
| UPS | Uninterruptible Power Supply |
| V2H | Vehicle-to-Home |
| V2G | Vehicle-to-Grid |
| VA | Vehicle Assembly |
| WPT | Wireless Power Transfer |
References
- Bozchalui, M.C.; Canizares, C.A.; Bhattacharya, K. Optimal Energy Management of Greenhouses in Smart Grids. IEEE Trans. Smart Grid 2014, 6, 827–835. [Google Scholar] [CrossRef]
- Ezzat, M.; Dincer, I. Development and assessment of a new hybrid vehicle with ammonia and hydrogen. Appl. Energy 2018, 219, 226–239. [Google Scholar] [CrossRef]
- Eurostat Regional Yearbook. Energy Statistics—An Overview; EUROSAT: Luxemburg, 2018. [Google Scholar]
- LeQuesne, B. Automotive Electrification: The Nonhybrid Story. IEEE Trans. Transp. Electrification 2015, 1, 40–53. [Google Scholar] [CrossRef]
- Su, W.; Eichi, H.; Zeng, W.; Chow, M.-Y. A Survey on the Electrification of Transportation in a Smart Grid Environment. IEEE Trans. Ind. Inform. 2011, 8, 1–10. [Google Scholar] [CrossRef]
- Bilgin, B.; Magne, P.; Malysz, P.; Yang, Y.; Pantelic, V.; Preindl, M.; Korobkine, A.; Jiang, W.; Lawford, M.; Emadi, A. Making the Case for Electrified Transportation. IEEE Trans. Transp. Electrification 2015, 1, 4–17. [Google Scholar] [CrossRef]
- Boulanger, A.G.; Chu, A.C.; Maxx, S.; Waltz, D.L. Vehicle Electrification: Status and Issues. Proc. IEEE 2011, 99, 1116–1138. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. A Review on the State-of-the-Art Technologies of Electric Vehicle, its Impacts and Prospects. Renew. Sustain. Energy. Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Tamai, G. What Are the Hurdles to Full Vehicle Electrification? IEEE Electrification Mag. 2019, 7, 5–11. [Google Scholar] [CrossRef]
- Chan, C.C. The State of the Art of Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 704–718. [Google Scholar] [CrossRef]
- Chan, C.C.; Bouscayrol, A.; Chen, K. Electric, Hybrid, and Fuel-Cell Vehicles: Architectures and Modeling. IEEE Trans. Veh. Technol. 2010, 59, 589–598. [Google Scholar] [CrossRef]
- Khaligh, A.; Li, Z. Battery, Ultracapacitor, Fuel Cell, and Hybrid Energy Storage Systems for Electric, Hybrid Electric, Fuel Cell, and Plug-In Hybrid Electric Vehicles: State of the Art. IEEE Trans. Veh. Technol. 2010, 59, 2806–2814. [Google Scholar] [CrossRef]
- Masrur, M.A. Toward Ground Vehicle Electrification in the U.S. Army: An Overview of Recent Activities. IEEE Electrification Mag. 2016, 4, 33–45. [Google Scholar] [CrossRef]
- Masrur, M.A.; Skowronska, A.G.; Hancock, J.; Kolhoff, S.W.; McGrew, D.Z.; Vandiver, J.C.; Gatherer, J. Military-Based Vehicle-to-Grid and Vehicle-to-Vehicle Microgrid—System Architecture and Implementation. IEEE Trans. Transp. Electrification 2017, 4, 157–171. [Google Scholar] [CrossRef]
- Alamgir, M. Lithium Has Transformed Vehicle Technology: How trends in Li-ion battery technology have developed for vehicle electrification. IEEE Electrification Mag. 2017, 5, 43–52. [Google Scholar] [CrossRef]
- Houseman, D. The Future of Batteries in an Electrified Fleet: Storage Will Play a Major Role. IEEE Electrification Mag. 2018, 6, 44–48. [Google Scholar] [CrossRef]
- Rajashekara, K. Present Status and Future Trends in Electric Vehicle Propulsion Technologies. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 3–10. [Google Scholar] [CrossRef]
- Wang, W.; Chen, X.; Wang, J. Motor/Generator Applications in Electrified Vehicle Chassis—A Survey. IEEE Trans. Transp. Electrification 2019, 5, 584–601. [Google Scholar] [CrossRef]
- Ferreira, J.C.; Monteiro, V.; Afonso, J.L. Vehicle-to-Anything Application (V2Anything App) for Electric Vehicles. IEEE Trans. Ind. Inform. 2013, 10, 1927–1937. [Google Scholar] [CrossRef]
- Galus, M.D.; Vayá, M.G.; Krause, T.; Andersson, G. The Role of Electric Vehicles in Smart Grids. WIREs Energy Environ. 2013, 2, 384–400. [Google Scholar] [CrossRef]
- Monteiro, V.; Afonso, J.A.; Ferreira, J.C.; Afonso, J.L. Vehicle Electrification: New Challenges and Opportunities for Smart Grids. Energies 2019, 12, 118. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Wu, D.; Gao, S. Opportunities and Challenges of Vehicle-to-Home, Vehicle-to-Vehicle, and Vehicle-to-Grid Technologies. Proc. IEEE 2013, 101, 2409–2427. [Google Scholar] [CrossRef]
- Tushar, M.H.K.; Zeineddine, A.W.; Assi, C. Demand-Side Management by Regulating Charging and Discharging of the EV, ESS, and Utilizing Renewable Energy. IEEE Trans. Ind. Inform. 2017, 14, 117–126. [Google Scholar] [CrossRef]
- Monteiro, V.; Pinto, J.G.O.; Afonso, J.L. Experimental Validation of a Three-Port Integrated Topology to Interface Electric Vehicles and Renewables with the Electrical Grid. IEEE Trans. Ind. Inform. 2018, 14, 2364–2374. [Google Scholar] [CrossRef]
- Chandler, S.; Gartner, J.; Jones, D. Integrating Electric Vehicles with Energy Storage and Grids: New Technology and Specific Capabilities Spur Numerous Applications. IEEE Electrification Mag. 2018, 6, 38–43. [Google Scholar] [CrossRef]
- Pavić, I.; Capuder, T.; Kuzle, I. A Comprehensive Approach for Maximizing Flexibility Benefits of Electric Vehicles. IEEE Syst. J. 2018, 12, 2882–2893. [Google Scholar] [CrossRef]
- Adib, A.; Shadmand, M.B.; Shamsi, P.; Afridi, K.K.; Amirabadi, M.; Fateh, F.; Ferdowsi, M.; Lehman, B.; Lewis, L.H.; Mirafzal, B.; et al. E-Mobility—Advancements and Challenges. IEEE Access 2019, 7, 165226–165240. [Google Scholar] [CrossRef]
- Ustun, T.S.; Zayegh, A.; Ozansoy, C. Electric Vehicle Potential in Australia: Its Impact on Smartgrids. IEEE Ind. Electron. Mag. 2013, 7, 15–25. [Google Scholar] [CrossRef]
- Donadee, J.; Shaw, R.; Garnett, O.; Cutter, E.; Min, L. Potential Benefits of Vehicle-to-Grid Technology in California: High Value for Capabilities beyond One-Way Managed Charging. IEEE Electrification Mag. 2019, 7, 40–45. [Google Scholar] [CrossRef]
- Jhunjhunwala, A.; Kaur, P.; Mutagekar, S. Electric Vehicles in India: A Novel Approach to Scale Electrification. IEEE Electrification Mag. 2018, 6, 40–47. [Google Scholar] [CrossRef]
- Hajimiragha, A.; Canizares, C.A.; Fowler, M.W.; Elkamel, A. Optimal Transition to Plug-In Hybrid Electric Vehicles in Ontario, Canada, Considering the Electricity-Grid Limitations. IEEE Trans. Ind. Electron. 2009, 57, 690–701. [Google Scholar] [CrossRef]
- Song, Y.; Yang, X.; Lu, Z. Integration of Plug-in Hybrid and Electric Vehicles Experience from China. In Proceedings of the IEEE PES Power and Energy Society General Meeting, Providence, RI, USA, 25–29 July 2010; pp. 1–6. [Google Scholar]
- Moghaddam, Z.; Ahmad, I.; Habibi, D.; Phung, Q.V. Smart Charging Strategy for Electric Vehicle Charging Stations. IEEE Trans. Transp. Electrification 2018, 4, 76–88. [Google Scholar] [CrossRef]
- Turton, H.; Moura, F. Vehicle-to-grid systems for sustainable development: An integrated energy analysis. Technol. Forecast. Soc. Chang. 2008, 75, 1091–1108. [Google Scholar] [CrossRef]
- Yu, R.; Zhong, W.; Xie, S.; Yuen, C.; Gjessing, S.; Zhang, Y. Balancing Power Demand Through EV Mobility in Vehicle-to-Grid Mobile Energy Networks. IEEE Trans. Ind. Inform. 2015, 12, 79–90. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Tang, H. Assessment of electric vehicles concerning impacts, charging infrastructure with unidirectional and bidirectional chargers, and power flow comparisons. Int. J. Energy Res. 2018, 42, 3416–3441. [Google Scholar] [CrossRef]
- Monteiro, V.D.F.; Pinto, J.G.; Afonso, J.L. Operation Modes for the Electric Vehicle in Smart Grids and Smart Homes: Present and Proposed Modes. IEEE Trans. Veh. Technol. 2016, 65, 1007–1020. [Google Scholar] [CrossRef]
- Monteiro, V.; Pinto, J.G.O.; Afonso, J.L. Improved vehicle-for-grid (iV4G) mode: Novel operation mode for EVs battery chargers in smart grids. Int. J. Electr. Power Energy Syst. 2019, 110, 579–587. [Google Scholar] [CrossRef]
- Monteiro, V.; Exposto, B.; Ferreira, J.C.; Afonso, J.L. Improved Vehicle-to-Home (iV2H) Operation Mode: Experimental Analysis of the Electric Vehicle as Off-Line UPS. IEEE Trans. Smart Grid 2016, 8, 2702–2711. [Google Scholar] [CrossRef]
- Hudgins, J.L. Power Electronic Devices in the Future. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 11–17. [Google Scholar] [CrossRef]
- Bose, B.K. Global Energy Scenario and Impact of Power Electronics in 21st Century. IEEE Trans. Ind. Electron. 2013, 60, 2638–2651. [Google Scholar] [CrossRef]
- Sun, X.; Li, Z.; Wang, X.; Li, C. Technology Development of Electric Vehicles: A Review. Energies 2020, 13, 90. [Google Scholar] [CrossRef]
- Chen, A.; Sen, P.K. Advancement in battery technology: A state-of-the-art review. In Proceedings of the 2016 IEEE Industry Applications Society Annual Meeting, Portland, OR, USA, 2–6 October 2016; pp. 1–10. [Google Scholar]
- Hannan, M.A.; Hoque, M.M.; Hussain, A.; Yusof, Y.; Ker, P.J. Stateof-the-art and energy management system of lithium-ion batteries in electric vehicle applications: Issues and recommendations. IEEE Access 2018, 6, 19362–19378. [Google Scholar] [CrossRef]
- Metwly, M.Y.; Abdel-Majeed, M.S.; Abdel-Khalik, A.S.; Hamdy, R.A.; Hamad, M.S.; Ahmed, S. A Review of Integrated On-Board EV Battery Chargers: Advanced Topologies, Recent Developments and Optimal Selection of FSCW Slot/Pole Combination. IEEE Access 2020, 8, 85216–85242. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Khaligh, A.; D’Antonio, M. Global Trends in High-Power On-Board Chargers for Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 3306–3324. [Google Scholar] [CrossRef]
- Feng, H.; Tavakoli, R.; Onar, O.C.; Pantic, Z. Advances in High-Power Wireless Charging Systems: Overview and Design Considerations. IEEE Trans. Transp. Electrification 2020, 6, 886–919. [Google Scholar] [CrossRef]
- Ahmad, A.; Alam, M.S.; Chabaan, R. A Comprehensive Review of Wireless Charging Technologies for Electric Vehicles. IEEE Trans. Transp. Electrification 2018, 4, 38–63. [Google Scholar] [CrossRef]
- De Lulhe, A.M.; Date, T.N. A Technology Review Paper for Drives used in Electrical Vehicle (EV) & Hybrid Electrical Vehicles (HEV). In Proceedings of the International Conference on Control, Instrumentation, Communication and Computational Technologies, Kumaracoil, India, 18–19 December 2015; pp. 632–636. [Google Scholar]
- Monteiro, V.D.F.; Pinto, J.G.; Exposto, B.F.; Monteiro, L.F.C.; Couto, C.; Afonso, J.L. A novel concept of unidirectional bridgeless combined boost-buck converter for EV battery chargers. In Proceedings of the 2015 IEEE 24th International Symposium on Industrial Electronics, Buzios, Brazil, 3–5 June 2015; pp. 210–215. [Google Scholar]
- Monteiro, V.; Ferreira, J.C.; Melendez, A.A.N.; Couto, C.; Afonso, J.L. Experimental Validation of a Novel Architecture Based on a Dual-Stage Converter for Off-Board Fast Battery Chargers of Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 1000–1011. [Google Scholar] [CrossRef]
- Shi, C.; Khaligh, A. A Two-Stage Three-Phase Integrated Charger for Electric Vehicles with Dual Cascaded Control Strategy. IEEE J. Emerg. Sel. Topic Power Electron. 2018, 6, 898–909. [Google Scholar] [CrossRef]
- Pandey, A.; Singh, B.; Singh, B.N.; Chandra, A.; Al Haddad, K.; Kothari, D.P. A Review of Multilevel Power Converters. J. Inst. Eng. 2006, 8, 220–231. [Google Scholar]
- Leon, J.I.; Vazquez, S.; Franquelo, L.G. Multilevel Converters: Control and Modulation Techniques for Their Operation and Industrial Applications. Proc. IEEE 2017, 105, 2066–2081. [Google Scholar] [CrossRef]
- Drobnic, K.; Grandi, G.; Hammami, M.; Mandrioli, R.; Ricco, M.; Viatkin, A.; Vujacic, M. An Output Ripple-Free Fast Charger for Electric Vehicles Based on Grid-Tied Modular Three-Phase Interleaved Converters. IEEE Trans. Ind. Appl. 2019, 55, 6102–6114. [Google Scholar] [CrossRef]
- Leite, R.S.; Afonso, J.L.; Monteiro, V. A Novel Multilevel Bidirectional Topology for On-Board EV Battery Chargers in Smart Grids. Energies 2018, 11, 3453. [Google Scholar] [CrossRef]
- Nussbaumer, T.; Raggl, K.; Kolar, J.W. Design Guidelines for Interleaved Single-Phase Boost PFC Circuits. IEEE Trans. Ind. Electron. 2009, 56, 2559–2573. [Google Scholar] [CrossRef]
- Ayele, G.T. Challenges of Multi-channel Interleaved Bidirectional Power Converters and Their Digital Solutions. Master’s Thesis, University of Nottingham, Nottingham, UK, September 2015. [Google Scholar]
- Krismer, F.; Biela, J.; Kolar, J.W. A Comparative Evaluation of Isolated Bi-directional DC/DC Converters with Wide Input and Output Voltage Range. In Proceedings of the IEEE Industry Applications Conference, Hong Kong, China, 2–6 October 2005; Volume 1, pp. 599–606. [Google Scholar]
- Gorji, S.A.; Sahebi, H.G.; Ektesabi, M.; Rad, A.B. Topologies and Control Schemes of Bidirectional DC–DC Power Converters: An Overview. IEEE Access 2019, 7, 117997–118019. [Google Scholar] [CrossRef]
- Du, Y.; Zhou, X.; Bai, S.; Lukic, S.; Huang, A. Review of non-isolated bi-directional DC-DC converters for plug-in hybrid electric vehicle charge station application at municipal parking decks. In Proceedings of the IEEE APEC Applied Power Electronics Conference and Exposition, Palm Springs, CA, USA, 21–25 February 2010; pp. 1145–1151. [Google Scholar]
- Monteiro, V.; Pinto, J.G.; Exposto, B.; Afonso, J.L. Comprehensive Comparison of a Current-Source and a Voltage-Source Converter for Three-Phase EV Fast Battery Chargers. In Proceedings of the CPE International Conference on Compatibility and Power Electronics, Costa da Caparica, Portugal, 24–26 June 2015; pp. 173–178. [Google Scholar]
- Monteiro, V.; Pinto, J.G.; Melendez, A.A.N.; Afonso, J.L. A novel single-phase five-level active rectifier for on-board EV battery chargers. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics, Edinburgh, UK, 19–21 June 2017; Volume 4, pp. 582–587. [Google Scholar]
- Monteiro, V.; Exposto, B.; Pinto, J.G.; Fernandes, J.A.; Monteiro, L.F.; Afonso, J.L. A Novel Architecture of a Bidirectional Bridgeless Interleaved Converter for EV Battery Chargers. In Proceedings of the IEEE ISIE International Symposium on Industrial Electronics, Buzios, Brazil, 3–5 June 2015; pp. 204–209. [Google Scholar]
- Monteiro, V.; Meléndez AA, N.; Couto, C.; Afonso, J.L. Model Predictive Current Control of a Proposed Single-Switch Three-Level Active Rectifier Applied to EV Battery Chargers. In Proceedings of the IEEE IECON Industrial Electronics Conference, Florence, Italy, 23–26 October 2016; pp. 1365–1370. [Google Scholar]
- Whitaker, B.; Barkley, A.; Cole, Z.; Passmore, B.; Martin, D.; McNutt, T.; Lostetter, A.B.; Lee, J.S.; Shiozaki, K. A High-Density, High-Efficiency, Isolated On-Board Vehicle Battery Charger Utilizing Silicon Carbide Power Devices. IEEE Trans. Power Electron. 2014, 29, 2606–2617. [Google Scholar] [CrossRef]
- Mouawad, B.; Espina, J.; Li, J.; Empringham, L.; Johnson, C.M. Novel Silicon Carbide Integrated Power Module for EV application. In Proceedings of the Workshop on Wide Bandgap Power Devices and Applications in Asia (WiPDA Asia), Xi’an, China, 16–18 May 2018; pp. 176–180. [Google Scholar]
- Williamson, S.S.; Rathore, A.K.; Musavi, F. Industrial Electronics for Electric Transportation: Current State-of-the-Art and Future Challenges. IEEE Trans. Ind. Electron. 2015, 62, 3021–3032. [Google Scholar] [CrossRef]
- Tu, H.; Feng, H.; Srdic, S.; Lukic, S. Extreme Fast Charging of Electric Vehicles: A Technology Overview. IEEE Trans. Transp. Electrification 2019, 5, 861–878. [Google Scholar] [CrossRef]
- Evtimov, I.; Ivanov, R.; Sapundjiev, M. Energy consumption of auxiliary systems of electric cars. MATEC Web Conf. 2017, 133, 06002. [Google Scholar] [CrossRef]
- Lee, Y.; Khaligh, A.; Emadi, A. Advanced Integrated Bidirectional AC/DC and DC/DC Converter for Plug-In Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2009, 58, 3970–3980. [Google Scholar]
- Kim, S.Y.; Song, H.-S.; Nam, K. Idling Port Isolation Control of Three-Port Bidirectional Converter for EVs. IEEE Trans. Power Electron. 2012, 27, 2495–2506. [Google Scholar] [CrossRef]
- Oh, W.J.; Kim, S.Y. Electric Vehicle and Charging Control Method for Auxiliary Battery Thereof. U.S. Patent 9,174,547, 3 November 2015. [Google Scholar]
- Pinto, J.G.; Monteiro, V.D.F.; Goncalves, H.; Afonso, J.L. Onboard Reconfigurable Battery Charger for Electric Vehicles with Traction-to-Auxiliary Mode. IEEE Trans. Veh. Technol. 2014, 63, 1104–1116. [Google Scholar] [CrossRef]
- Lee, J.; Kang, F. Low voltage dc-to-dc converter combining flyback and boost converter for charging an auxiliary battery in hybrid electric vehicle. In Proceedings of the IEEE International Conference on Power Electronics and Drive Systems, Kitakyushu, Japan, 22–25 April 2013; pp. 286–288. [Google Scholar]
- Chen, W.; Round, S.; Duke, R. Design of an auxiliary power distribution network for an electric vehicle. In Proceedings of the IEEE International Workshop on Electronic Design, Test and Applications, Christchurch, New Zealand, 29–31 January 2002; pp. 257–261. [Google Scholar]
- Coltman, J.W. The transformer [historical overview]. IEEE Ind. Appl. Mag. 2002, 8, 8–15. [Google Scholar] [CrossRef]
- The Faraday Centenary. Bell Syst. Tech. J. 1931, 10, 1–7.
- Faraday, M. Experimental Researches in Electricity, 2nd ed.; Richard and John E. Taylor: London, UK, 1839; Volume 1. [Google Scholar]
- Terman, F.E. Resistance at Radio Frequencies—Skin Effect, Section 2.4. In Radio Engineer’s Handbook; McGraw-Hill Book Company Inc.: New York, NY, USA, 1943; pp. 28–37. [Google Scholar]
- Tesla, N. Nikola Tesla on His Work with Alternating Currents and Their Application to Wireless Telegraphy, Telephony, and Transmission of Power—An Extended Interview; Tesla Presents Series, Part 1; Twenty First Century Books: Breckenridge, CO, USA, 1992. [Google Scholar]
- van Schuylenbergh, K.; Puers, R. Inductive Powering—Basic Theory and Application to Biomedical Systems; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Zargham, M.; Gulak, P.G. Maximum Achievable Efficiency in Near-Field Coupled Power-Transfer Systems. IEEE Trans. Biomed. Circuits Syst. 2012, 6, 228–245. [Google Scholar] [CrossRef]
- Liao, C. Design of LCC Impedance Matching Circuit for Wireless Power Transfer System under Rectifier Load. CPSS Trans. Power Electron. Appl. 2017, 2, 237–245. [Google Scholar] [CrossRef]
- Terman, F.E. Two Resonant Circuits Tuned to the Same Frequency and Coupled Together, Sections 3.5 and 3.6. In Radio Engineer’s Handbook; McGraw-Hill Book Company, Inc.: New York, NY, USA, 1943; pp. 154–164. [Google Scholar]
- Niu, W.-Q.; Chu, J.-X.; Gu, W.; Shen, A.-D. Exact Analysis of Frequency Splitting Phenomena of Contactless Power Transfer Systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 60, 1670–1677. [Google Scholar] [CrossRef]
- Lyu, Y.-L.; Meng, F.-Y.; Yang, G.-H.; Che, B.-J.; Wu, Q.; Sun, L.; Erni, D.; Li, L.-W. A Method of Using Nonidentical Resonant Coils for Frequency Splitting Elimination in Wireless Power Transfer. IEEE Trans. Power Electron. 2015, 30, 6097–6107. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Xue, C.-D.; Lin, J.-K. Distance-Insensitive Wireless Power Transfer Using Mixed Electric and Magnetic Coupling for Frequency Splitting Suppression. IEEE Trans. Microw. Theory Tech. 2017, 65, 4307–4316. [Google Scholar] [CrossRef]
- Cardoso, L.L.; Monteiro, V.; Pinto, J.G.O.; Nogueira, M.; Abreu, A.; Afonso, J.A.; Afonso, J.L. Design of an Intrinsically Safe Series-Series Compensation WPT System for Automotive LiDAR. Electronics 2020, 9, 86. [Google Scholar] [CrossRef]
- Wang, C.-S.; Covic, G.A.; Stielau, O.H. Power Transfer Capability and Bifurcation Phenomena of Loosely Coupled Inductive Power Transfer Systems. IEEE Trans. Ind. Electron. 2004, 51, 148–157. [Google Scholar] [CrossRef]
- Li, J.; Ji, K. Frequency splitting research of series-parallel type magnetic coupling resonant wireless power transfer system. In Proceedings of the IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; pp. 2254–2257. [Google Scholar]
- Li, S.; Mi, C.C. Wireless Power Transfer for Electric Vehicle Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Onar, O.C.; Chinthavali, M.; Campbell, S.L.; Seiber, L.E.; White, C.P.; Galigekere, V.P. Modeling, Simulation, and Experimental Verification of a 20-kW Series-Series Wireless Power Transfer System for a Toyota RAV4 Electric Vehicle. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 874–880. [Google Scholar]
- Jha, R.K.; Giacomuzzi, S.; Buja, G.; Bertoluzzo, M.; Naik, M.K. Efficiency and power sizing of SS vs. SP topology for wireless battery chargers. In Proceedings of the IEEE International Power Electronics and Motion Control Conference (PEMC), Varna, Bulgaria, 25–28 September 2016; pp. 1014–1019. [Google Scholar]
- Rehman, M.; Nallagownden, P.; Baharudin, Z. Efficiency investigation of SS and SP compensation topologies for wireless power transfer. Int. J. Power Electron. Drive Syst. 2019, 10, 2157–2164. [Google Scholar] [CrossRef]
- Shevchenko, V.; Husev, O.; Strzelecki, R.; Pakhaliuk, B.; Poliakov, N.; Strzelecka, N. Compensation Topologies in IPT Systems: Standards, Requirements, Classification, Analysis, Comparison and Application. IEEE Access 2019, 7, 120559–120580. [Google Scholar] [CrossRef]
- Zhang, W.; Mi, C.C. Compensation Topologies of High-Power Wireless Power Transfer Systems. IEEE Trans. Veh. Technol. 2016, 65, 4768–4778. [Google Scholar] [CrossRef]
- Singh, B.N.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D.P. A review of single-phase improved power quality ac~dc converters. IEEE Trans. Ind. Electron. 2003, 50, 962–981. [Google Scholar] [CrossRef]
- Wong, N.; Kazerani, M. A Review of Bidirectional On-Board Charger Topologies for Plug-In Vehicles. In Proceedings of the IEEE CCECE Canadian Conference on Electrical & Computer Engineering, Montreal, QC, Canada, 29 April–2 May 2012; pp. 1–6. [Google Scholar]
- Singh, B.; Singh, S.; Chandra, A.; Al-Haddad, K. Comprehensive Study of Single-Phase AC-DC Power Factor Corrected Converters with High-Frequency Isolation. IEEE Trans. Ind. Inform. 2011, 7, 540–556. [Google Scholar] [CrossRef]
- Lai, J.-S.; Peng, F.Z. Multilevel converters-a new breed of power converters. IEEE Trans. Ind. Appl. 1996, 32, 509–517. [Google Scholar]
- Rodriguez, J.; Lai, J.-S.; Peng, F.Z. Multilevel inverters: A survey of topologies, controls, and applications. IEEE Trans. Ind. Electron. 2002, 49, 724–738. [Google Scholar] [CrossRef]
- Park, S.-J.; Kang, F.-S.; Lee, M.H.; Kim, C.-U. A new single-phase five-level PWM inverter employing a deadbeat control scheme. IEEE Trans. Power Electron. 2003, 18, 831–843. [Google Scholar] [CrossRef]
- Marchesoni, M.; Tenconi, M.M.S. A Non-Conventional Power Converter for Plasma Stabilization. In Proceedings of the IEEE PESC Power Electronics Specialists Conference, Kyoto, Japan, 11–14 April 1988; Volume 1, pp. 122–129. [Google Scholar]
- Khoucha, F.; Lagoun, M.S.; Kheloui, A.; Benbouzid, M.E. A Comparison of Symmetrical and Asymmetrical Three-Phase H-Bridge Multilevel Inverter for DTC InductionMotor Drives. IEEE Trans. Energy Convers. 2011, 26, 64–72. [Google Scholar] [CrossRef]
- Zhang, L.; Sun, K.; Feng, L.; Wu, H.; Xing, Y. A Family of Neutral Point Clamped Full-Bridge Topologies for Transformerless Photovoltaic Grid-Tied Inverters. IEEE Trans. Power Electron. 2013, 28, 730–739. [Google Scholar] [CrossRef]
- Teixeira, C.A.; Holmes, D.G.; McGrath, B.P. Single-Phase Semi-Bridge Five-Level Flying-Capacitor Rectifier. IEEE Trans. Ind. Appl. 2013, 49, 2158–2166. [Google Scholar] [CrossRef]
- Fu, M.; Ma, C.; Zhu, X. A Cascaded Boost—Buck Converter for High-Efficiency Wireless Power Transfer Systems. IEEE Trans. Ind. Inform. 2014, 10, 1972–1980. [Google Scholar] [CrossRef]
- Kim, M.; Marius, T.; Lee, G.; Oh, J.; Yoo, K.; Kim, E.; Hwang, I. A Single-Stage Three-Level AC/DC Converter for Wireless Power Transfer. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 17–21 March 2019; pp. 3123–3128. [Google Scholar]
- Vardani, B.; Tummuru, N.R. Bidirectional Wireless Power Transfer Using Single Phase Matrix Converter for Electric Vehicle Application. In Proceedings of the IEEE TENCON 2019—Region 10 Conference, Kochi, India, 17–20 October 2019; pp. 1523–1528. [Google Scholar]
- Liu, J.; Chan, K.W.; Chung, C.Y.; Chan, N.H.L.; Liu, M.; Xu, W. Single-Stage Wireless-Power-Transfer Resonant Converter With Boost Bridgeless Power-Factor-Correction Rectifier. IEEE Trans. Ind. Electron. 2017, 65, 2145–2155. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, Y.; Madawala, U.K.; Thrimawithana, D.J.; Ma, H. A New Controller for Bidirectional Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2018, 33, 9076–9087. [Google Scholar] [CrossRef]
- Lee, J.Y.; Han, B.-M. A Bidirectional Wireless Power Transfer EV Charger Using Self-Resonant PWM. IEEE Trans. Power Electron. 2014, 30, 1784–1787. [Google Scholar] [CrossRef]
- Liu, J.; Xu, W.; Chan, K.W.; Liu, M.; Zhang, X.; Chan, N.H.L. A Three-Phase Single-Stage AC-DC Wireless-Power-Transfer Converter with Power Factor Correction and Bus Voltage Control. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1782–1800. [Google Scholar] [CrossRef]
- Samanta, S.; Rathore, A.K. A New Inductive Power Transfer Topology Using Direct AC–AC Converter With Active Source Current Waveshaping. IEEE Trans. Power Electron. 2017, 33, 5565–5577. [Google Scholar] [CrossRef]
- González-Santini, N.S.; Zeng, H.; Yu, Y.; Peng, F.Z. Z-Source Resonant Converter with Power Factor Correction for Wireless Power Transfer Applications. IEEE Trans. Power Electron. 2016, 31, 7691–7700. [Google Scholar] [CrossRef]
- Society of Automobile Engineers (SAE). SAE Technical Information Report J2954—Wireless Power Transfer for Light-Duty Plug-In/ Electric Vehicles and Alignment Methodology; SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Society of Automobile Engineers (SAE). SAE International Surface Vehicle Recommended Practice, ‘Communication between Wireless Charged Vehicles and Wireless EV Chargers,’ SAE Standard J2847/6; SAE International: Warrendale, PA, USA, 2015. [Google Scholar]
- Lee, G.; Park, J.; Sim, Y.; Cho, D. Implementation of WPT communication system based on SAE J2847 standard for electric vehicle. In Proceedings of the IEEE Vehicular Networking Conference (VNC), Torino, Italy, 27–29 November 2017; pp. 251–254. [Google Scholar]
- Pantic, Z.; Bai, S.; Lukic, S.M. ZCS LCC-Compensated Resonant Inverter for Inductive-Power-Transfer Application. IEEE Trans. Ind. Electron. 2010, 58, 3500–3510. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C. A Double-Sided LCC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Technol. 2014, 64, 2261–2273. [Google Scholar] [CrossRef]
- Madawala, U.K.; Thrimawithana, D.J. A Bidirectional Inductive Power Interface for Electric Vehicles in V2G Systems. IEEE Trans. Ind. Electron. 2011, 58, 4789–4796. [Google Scholar] [CrossRef]
- Zhang, Y.; He, F.; Liu, F.; Chen, K.; Zhao, Z.; Yuan, L. Comparison of two bidirectional wireless power transfer control methods. In Proceedings of the 2016 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Shenzhen, China, 17–21 May 2016; Volume 1, pp. 68–70. [Google Scholar]
- Huang, M.; Lu, Y.; Martins, R.P. A Reconfigurable Bidirectional Wireless Power Transceiver for Battery-to-Battery Wireless Charging. IEEE Trans. Power Electron. Aug. 2019, 34, 7745–7753. [Google Scholar] [CrossRef]
- Izumi, T.; Hirota, M.; Hatanaka, K.; Isoyama, Y.; Sano, K.; Takayama, K. Bidirectional Charging Unit for Vehicle-to-X (V2X) Power Flow. SEI Tech. Rev. Oct. 2014, 79, 39–42. [Google Scholar]
- Monteiro, V.; Afonso, J.A.; Sousa, T.J.C.; Cardoso, L.L.; Pinto, J.G.; Afonso, J.L. Vehicle Electrification: Technologies, Challenges, and a Global Perspective for Smart Grids. In Innovation in Energy Systems; Ustun, T.S., Ed.; IntechOpen: Rijeka, Croatia, 2019. [Google Scholar]
- Tachikawa, K.; Kesler, M.; Atasoy, O. Feasibility Study of Bi-Directional Wireless Charging for Vehicle-to-Grid; SAE Technical Paper 2018-01-0669; SAE International: Warrendale, PA, USA, 2018; pp. 1–9. [Google Scholar]
- International Commission on Non-Ionizing Radiation Protection. Guidelines for limiting exposure to time-varying electric and magnetic fields (1 Hz to 100 kHz). Health Phys. 2010, 99, 818–836. [Google Scholar]
- Bateman, D.; Leal, D.; Reeves, S.; Emre, M.; Stark, L.; Myers, R.; Lamb, M. TRL Academy Report PPR875—Electric Road Systems: A solution for the future; TRL: Wokingham, UK, 2018. [Google Scholar]
- Hutin, M.; Leblanc, M. Un Nouveau Système de Traction Électrique des Véhicules (A New Electric Traction System for Vehicles). French Republic Patent 209,323, 18 February 1891. [Google Scholar]
- Pyrgidis, C.N. Railway Transportation Systems—Design, Construction and Operation, 1st ed.; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Siemens Historical Institute. The Siemens Tram from Past to Present. Available online: https://www.siemens.com/history/pool/innovationen/mobilitaet/the_siemens_tram_from_past_to_present.pdf (accessed on 28 February 2017).
- Davies, R.A. ‘Wireless’ Autos: A Russian Dream. Macleans Mag. 1945, 58, 34–36. [Google Scholar]
- Babat, G.I. High Frequency Electric Transport System with Contactless Transmission of Energy. Filled 26 March 1946. UK Patent 657,035, 12 September 1951. [Google Scholar]
- Bolger, J.G. Supplying Power to Vehicles. Filed 10 September 1974. U.S. Patent 3,914,562, 21 October 1975. [Google Scholar]
- Bolger, J.G.; Kirsten, F.A. Investigation of the Feasibility of a Dual Mode Electric Transportation System; Lawrence Berkeley Laboratory, University of California: Berkeley, CA, USA, 1977. [Google Scholar]
- Lashkari, K.; Shladover, S.E.; Lechner, E.H. Inductive Power Transfer to an Electric Vehicle. In Proceedings of the Eighth International Electric Vehicle Symposium, Washington, DC, USA, 20–23 October 1986. [Google Scholar]
- Systems Control Technology Inc. Roadway Powered Electric Vehicle Project Track Construction and Testing Program Phase 3D; California Partners for Advanced Transit and Highways (PATH); California PATH Research Paper UCB-ITS-PRR-94-07; University of California, Berkeley: Palo Alto, CA, USA, 1994. [Google Scholar]
- Boys, J.T.; Covic, G.A. The Inductive Power Transfer Story at the University of Auckland. IEEE Circuits Syst. Mag. 2015, 15, 6–27. [Google Scholar] [CrossRef]
- Covic, G.A.; Elliott, G.; Stielau, O.H.; Green, R.M.; Boys, J.T. The design of a contact-less energy transfer system for a people mover system. In Proceedings of the International Conference on Power System Technology. Proceedings (Cat. No.00EX409), Perth, Australia, 4–7 December 2000; Volume 1, pp. 79–84. [Google Scholar]
- Ahn, S.; Pak, J.; Song, T.; Lee, H.; Byun, J.G.; Kang, D.; Cha, Y. Low frequency electromagnetic field reduction techniques for the On-Line Electric Vehicle (OLEV). In Proceedings of the IEEE International Symposium on Electromagnetic Compatibility, Fort Lauderdale, FL, USA, 25–30 July 2010; pp. 625–630. [Google Scholar]
- Huh, J.; Lee, W.; Cho, G.-H.; Lee, B.; Rim, C.-T. Characterization of Novel Inductive Power Transfer Systems for On-Line Electric Vehicles. In Proceedings of the Twenty-Sixth Annual IEEE Applied Power Electronics Conference and Exposition, Fort Worth, TX, USA, 6–11 March 2011; pp. 1975–1979. [Google Scholar]
- Ahn, S.; Lee, J.Y.; Cho, D.H.; Kim, J. Magnetic Field Design for Low EMF and High Efficiency Wireless Power Transfer System in On-Line Electric Vehicles. In Proceedings of the CIRP Design Conference, Daejeon, Korea, 27–29 March 2011; pp. 233–239. [Google Scholar]
- Suh, N.P.; Cho, D.H. The On-line Electric Vehicle—Wireless Electric Ground Transportation Systems, 1st ed.; Springer: New York, NY, USA, 2017. [Google Scholar]
- Rim, C.T.; Mi, C. Wireless Power Transfer for Electric Vehicles and Mobile Devices, 1st ed.; John Wiley & Sons Ltd.—IEEE Press: Hoboken, NJ, USA, 2017. [Google Scholar]
- Valtchev, S.; Borges, B.; Brandisky, K.; Ben Klaassens, J. Resonant Contactless Energy Transfer with Improved Efficiency. IEEE Trans. Power Electron. 2009, 24, 685–699. [Google Scholar] [CrossRef]
- Throngnumchai, K.; Hanamura, A.; Naruse, Y.; Takeda, K. Design and evaluation of a wireless power transfer system with road embedded transmitter coils for dynamic charging of electric vehicles. World Electr. Veh. Symp. Exhib. 2013, 1–10. [Google Scholar] [CrossRef]
- Lukic, S.; Pantic, Z. Cutting the Cord: Static and Dynamic Inductive Wireless Charging of Electric Vehicles. IEEE Electrification Mag. 2013, 1, 57–64. [Google Scholar] [CrossRef]
- Miller, J.M.; Onar, O.C.; White, C.; Campbell, S.; Coomer, C.; Seiber, L.; Sepe, R.; Steyerl, A. Demonstrating Dynamic Wireless Charging of an Electric Vehicle: The Benefit of Electrochemical Capacitor Smoothing. IEEE Power Electron. Mag. 2014, 1, 12–24. [Google Scholar] [CrossRef]
- Buja, G.; Bertoluzzo, M.; Dashora, H.K. Lumped Track Layout Design for Dynamic Wireless Charging of Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6631–6640. [Google Scholar] [CrossRef]
- Mi, C.C.; Buja, G.; Choi, S.Y.; Rim, C.T. Modern Advances in Wireless Power Transfer Systems for Roadway Powered Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6533–6545. [Google Scholar] [CrossRef]
- Laporte, S.; Coquery, G.; Revilloud, M.; Deniau, V. Experimental performance assessment of a dynamic wireless power transfer system for future EV in real driving conditions. In Proceedings of the Workshop on Electric Vehicle Systems, Data, and Applications (EV-Sys 2018), Karlsruhe, Germany, 12–15 June 2018; pp. 570–578. [Google Scholar]
- Laporte, S.; Coquery, G.; Deniau, V.; De Bernardinis, A.; Hautière, N.; Bernardinis, D. Dynamic Wireless Power Transfer Charging Infrastructure for Future EVs: From Experimental Track to Real Circulated Roads Demonstrations. World Electr. Veh. J. 2019, 10, 84. [Google Scholar] [CrossRef]
- Cirimele, V.; Diana, M.; Freschi, F.; Mitolo, M. Inductive Power Transfer for Automotive Applications: State-of-the-Art and Future Trends. IEEE Trans. Ind. Appl. 2018, 54, 4069–4079. [Google Scholar] [CrossRef]
- Cirimele, V.; Diana, M.; Bellotti, F.; Berta, R.; El Sayed, N.; Kobeissi, A.; Guglielmi, P.; Ruffo, R.; Khalilian, M.; La Ganga, A.; et al. The Fabric ICT Platform for Managing Wireless Dynamic Charging Road Lanes. IEEE Trans. Veh. Technol. 2020, 69, 2501–2512. [Google Scholar] [CrossRef]
- Kane, M. Sweden to Test Dynamic Wireless Charging on Island of Gotland. InsideEVs, 20 April 2020. Available online: https://insideevs.com/news/345858/sweden-to-test-dynamic-wireless-charging-on-island-of-gotland/ (accessed on 1 May 2020).
- Cardoso, L.A.L.; Martinez, M.C.; Melendez, A.A.N.; Afonso, J.L. Dynamic inductive power transfer lane design for e-bikes. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 2307–2312. [Google Scholar]
- Cardoso, L.A.L.; Afonso, J.L.; Martinez, M.C.; Meléndez, A.A.N. RFID-Triggered Power Activation for Smart Dynamic Inductive Wireless Power Transfer. In Proceedings of the IECON—The Annual Conference of the IEEE Industrial Electronics Society (IES), Beijing, China, 29 October–1 November 2017. [Google Scholar]
- Afonso, J.A.; Duarte, H.G.; Cardoso, L.L.; Monteiro, V.; Afonso, J.L. Wireless Communication and Management System for E-Bike Dynamic Inductive Power Transfer Lanes. Electronics 2020, 9, 1485. [Google Scholar] [CrossRef]
- Hurst, N. Is Wireless Charging for Cars Finally Here? 2018. Available online: https://www.smithsonianmag.com/innovation/wireless-charging-cars-finally-here-180970494/ (accessed on 4 July 2020).
- Allied Market Research. Wireless Electric Vehicle Charging Market Statistics 2020–2030. Available online: https://www.alliedmarketresearch.com/wireless-electric-vehicle-charging-market (accessed on 4 July 2020).
- VynZ Research. Wireless Electric Vehicle Charging Market—Analysis and Forecast (2019–2025). Available online: https://www.vynzresearch.com/press-release/global-wireless-electric-vehicle-charging-market (accessed on 1 May 2020).
- De Santiago, J.; Bernhoff, H.; Ekergård, B.; Eriksson, S.; Ferhatovic, S.; Waters, R.; Leijon, M. Electrical Motor Drivelines in Commercial All-Electric Vehicles: A Review. IEEE Trans. Veh. Technol. 2012, 61, 475–484. [Google Scholar] [CrossRef]
- Apatya, Y.B.A.; Subiantoro, A.; Yusivar, F. Design and prototyping of 3-phase BLDC motor. In Proceedings of the International Conference on Quality in Research (QiR): International Symposium on Electrical and Computer Engineering, Nusa Dua, Indonesia, 24–27 July 2017; pp. 209–214. [Google Scholar]
- Akhtar, M.A.; Saha, S. Positive Current Reference Generation based Current Control Technique for BLDC Motor Drives Applications. In Proceedings of the International Conference on Advanced Computing & Communication Systems (ICACCS), Coimbatore, India, 15–16 March 2019; pp. 496–500. [Google Scholar]
- Kumar, B.V.R.; Kumar, K.S. Design of a new Dual Rotor Radial Flux BLDC motor with Halbach array magnets for an electric vehicle. In Proceedings of the IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Trivandrum, India, 14–17 December 2016; pp. 1–5. [Google Scholar]
- Hughes, A.; Drury, B. Electric Motors and Drives—Fundamentals, Types and Applications, 5th ed.; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Wang, Y.; Chau, K.T.; Chan, C.C.; Jiang, J.Z. Transient analysis of a new outer-rotor permanent-magnet brushless DC drive using circuit-field-torque coupled time-stepping finite-element method. IEEE Trans. Magn. 2002, 38, 1297–1300. [Google Scholar] [CrossRef]
- Honda. Honda e. 2019. Available online: https://honda-automoveis.pt/reservashondae/wp-content/uploads/2020/08/Catalogo-Honda-e-20YM.pdf (accessed on 8 September 2020).
- Saunders, R.M.; Weakley, R.H. Design of Permanent-Magnet Alternators. Trans. Am. Inst. Electr. Eng. 1951, 70, 1578–1581. [Google Scholar] [CrossRef]
- Merrill, F.W. Permanent magnet excited synchronous motors. Electr. Eng. 1955, 74, 143. [Google Scholar] [CrossRef]
- Bauerlein, G. A Brushless DC Motor with Solid-State Commutation. In Proceedings of the IRE National Convention, New York, NY, USA, 26–29 March 1962; pp. 184–190. [Google Scholar]
- Sato, N.; Semenov, V.V. Adjustable Speed Drive with a Brushless DC Motor. IEEE Trans. Ind. Gen. Appl. 1971, 7, 539–543. [Google Scholar] [CrossRef]
- Sato, N. A Brushless DC Motor with Armature Induced Voltage Commutation. IEEE Trans. Power Appar. Syst. 1972, 91, 1485–1492. [Google Scholar] [CrossRef]
- Inagaki, J.; Kuniyoshi, M.; Tadakuma, S. Commutators get the brushoff. IEEE Spectr. 1973, 10, 52–58. [Google Scholar] [CrossRef]
- Woodbury, J.R. The Design of Brushless DC Motor Systems. IEEE Trans. Ind. Electron. Control. Instrum. 1974, 21, 52–60. [Google Scholar] [CrossRef]
- Chalmers, B.; Pacey, K.; Gibson, J. Brushless d.c. traction drive. Proc. Inst. Electr. Eng. 1975, 122, 733. [Google Scholar] [CrossRef]
- Mohan, N. Electric Machines and Drives, 1st ed.; John Wiley & Sons Ltd.—IEEE Press: Hoboken, NJ, USA, 2012. [Google Scholar]
- Richter, E.; Neumann, T. Line start permanent magnet motors with different materials. IEEE Trans. Magn. 1984, 20, 1762–1764. [Google Scholar] [CrossRef]
- Levran, A.; Levi, E. Design of polyphase motors with PM excitation. IEEE Trans. Magn. 1984, 20, 507–515. [Google Scholar] [CrossRef]
- Miller, T.J.E. Synchronization of Line-Start Permanent-Magnet AC Motors. IEEE Trans. Power Appar. Syst. 1984, PAS-103, 1822–1828. [Google Scholar] [CrossRef]
- Binns, K.; Wong, T. Analysis and performance of a high-field permanent-magnet synchronous machine. IEE Proc. B Electr. Power Appl. 1984, 131, 252–258. [Google Scholar] [CrossRef]
- Rahman, M.; Little, T. Dynamic Performance Analysis of Permanet Magnet Synchronous Motors Magnet Synchronous Motors. IEEE Trans. Power Appar. Syst. 1984, 103, 1277–1282. [Google Scholar] [CrossRef]
- Jahns, T.M. Flux-Weakening Regime Operation of an Interior Permanent-Magnet Synchronous Motor Drive. IEEE Trans. Ind. Appl. 1987, 23, 681–689. [Google Scholar] [CrossRef]
- Pillay, P.; Krishnan, R. Modeling, simulation, and analysis of permanent-magnet motor drives. I. The permanent-magnet synchronous motor drive. IEEE Trans. Ind. Appl. 1989, 25, 265–273. [Google Scholar] [CrossRef]
- Jahns, T.M.; Kliman, G.B.; Neumann, T.W. Interior Permanent-Magnet Synchronous Motors for Adjustable-Speed Drives. IEEE Trans. Ind. Appl. 1986, 22, 738–747. [Google Scholar] [CrossRef]
- Toyota Prius. Available online: https://www.toyota.pt/new-cars/prius/features-and-specs.json (accessed on 30 July 2020).
- Nissan Leaf. Available online: https://www.nissan.pt/veiculos/novos-veiculos/leaf/dimensoes-especificacoes.html (accessed on 30 July 2020).
- Douglas, J.F.H. Characteristics of Induction Motors with Permanent-Magnet Excitation. Trans. Am. Inst. Electr. Eng. Part III Power Appar. Syst. 1959, 78, 221–225. [Google Scholar] [CrossRef]
- Shibata, Y.; Tsuchida, N.; Imai, K. Performance of induction motor with free-rotating magnets inside its rotor. IEEE Trans. Ind. Electron. 1999, 46, 646–652. [Google Scholar] [CrossRef]
- Tsuda, T.; Fukami, T.; Kanamaru, Y.; Miyamoto, T. Effects of the Built-in Permanent Magnet Rotor on the Equivalent Circuit Parameters of a Permanent Magnet Induction Generator. IEEE Trans. Energy Convers. 2007, 22, 798–799. [Google Scholar] [CrossRef]
- Pellegrino, G.-M.L.; Vagati, A.; Boazzo, B.; Guglielmi, P. Comparison of Induction and PM Synchronous Motor Drives for EV Application Including Design Examples. IEEE Trans. Ind. Appl. 2012, 48, 2322–2332. [Google Scholar] [CrossRef]
- Pindoriya, R.M.; Rajpurohit, B.S.; Kumar, R.; Srivastava, K.N. Comparative analysis of permanent magnet motors and switched reluctance motors capabilities for electric and hybrid electric vehicles. In Proceedings of the IEEMA Engineer Infinite Conference (eTechNxT), New Delhi, India, 13–14 March 2018; pp. 1–5. [Google Scholar]
- Kostko, J.K. Polyphase reaction synchronous motors. J. Am. Inst. Electr. Eng. 1923, 42, 1162–1168. [Google Scholar] [CrossRef]
- Lawrenson, P.; Stephenson, J.; Fulton, N.; Blenkinsop, P.; Corda, J. Variable-speed switched reluctance motors. IEE Proc. B Electr. Power Appl. 1980, 127, 253. [Google Scholar] [CrossRef]
- Hwang, H.; Bae, S.; Lee, C. Analysis and Design of a Hybrid Rare-Earth-Free Permanent Magnet Reluctance Machine by Frozen Permeability Method. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Farahani, E.F.; Kondelaji, M.A.J.; Mirsalim, M. An Innovative Hybrid-Excited Multi-Tooth Switched Reluctance Motor for Torque Enhancement. IEEE Trans. Ind. Electron. 2020, 46, 982–992. [Google Scholar] [CrossRef]
- Fratta, A.; Vagati, A.; Villata, F. On the evolution of AC machines for spindle drive applications. IEEE Trans. Ind. Appl. 1992, 28, 1081–1086. [Google Scholar] [CrossRef]
- Ooi, S.; Morimoto, S.; Sanada, M.; Inoue, Y. Performance Evaluation of a High-Power-Density PMASynRM with Ferrite Magnets. IEEE Trans. Ind. Appl. 2013, 49, 1308–1315. [Google Scholar] [CrossRef]
- Krishnan, R. An energy-efficiency-enhanced switched reluctance motor [From Mind to Market]. IEEE Ind. Electron. Mag. 2007, 1, 4–6. [Google Scholar] [CrossRef]
- Gan, C.; Chen, Y.; Qu, R.; Yu, Z.; Kong, W.; Hu, Y. An Overview of Fault-Diagnosis and Fault-Tolerance Techniques for Switched Reluctance Machine Systems. IEEE Access 2019, 7, 174822–174838. [Google Scholar] [CrossRef]
- Aiso, K.; Akatsu, K. High Speed SRM UsingVector Control for Electric Vehicle. China Electrotech. Soc. Trans. Electr. Mach. Syst. 2020, 4, 61–68. [Google Scholar] [CrossRef]
- Li, S.; Zhang, S.; Habetler, T.G.; Harley, R.G. Modeling, Design Optimization, and Applications of Switched Reluctance Machines—A Review. IEEE Trans. Ind. Appl. 2019, 55, 2660–2681. [Google Scholar] [CrossRef]
- Azer, P.; Bilgin, B.; Emadi, A. Mutually Coupled Switched Reluctance Motor: Fundamentals, Control, Modeling, State of the Art Review and Future Trends. IEEE Access 2019, 7, 100099–100112. [Google Scholar] [CrossRef]
- Hua, H.; Hua, W.; Zhao, G.; Cheng, M. Torque Production Mechanism of Switched Reluctance Machines with Air-Gap Field Modulation Principle. IEEE Trans. Energy Convers. 2020, 8969, 1617–1627. [Google Scholar] [CrossRef]
- Lipo, T.A. Synchronous Reluctance Machines-A Viable Alternative for AC Drives? Electr. Mach. Power Syst. 1991, 19, 659–671. [Google Scholar] [CrossRef]
- EBostanci, E.; Moallem, M.; Parsapour, A.; Fahimi, B. Opportunities and Challenges of Switched Reluctance Motor Drives for Electric Propulsion: A Comparative Study. IEEE Trans. Transp. Electrification 2017, 3, 58–75. [Google Scholar] [CrossRef]
- Lee, C.H.T.; Chau, K.T.; Liu, C.; Wu, D.; Gao, S. Quantitative Comparison and Analysis of Magnetless Machines With Reluctance Topologies. IEEE Trans. Magn. 2013, 49, 3969–3972. [Google Scholar] [CrossRef]
- Gan, C.; Wu, J.; Sun, Q.; Kong, W.; Li, H.; Hu, Y. A Review on Machine Topologies and Control Techniques for Low-Noise Switched Reluctance Motors in Electric Vehicle Applications. IEEE Access 2018, 6, 31430–31443. [Google Scholar] [CrossRef]
- Bolvashenkov, I.; Kammermann, J.; Herzog, H. Multi-Criteria Analysis for Ultimate Selection of the Vehicle Traction Electric Motor: Methodology and Application. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 366–371. [Google Scholar]
- Rachev, S.; Stefanov, D.; Dimitrov, L.; Koeva, D. Evaluation of Electric Power Losses of an Induction Motor Driving a Compact Electric Vehicle at Change of Parameters and Loads. In Proceedings of the Electric Vehicles International Conference (EV), Bucharest, Romania, 3–4 October 2019; pp. 1–5. [Google Scholar]
- Aliasand, A.E.; Josh, F.T. Selection of Motor for an Electric Vehicle: A Review. Mater. Today Proc. 2020, 24, 1804–1815. [Google Scholar] [CrossRef]
- Ehsani, M.; Bass, J.T.; Miller, T.J.E.; Steigerwald, R.L. Development of a Unipolar Converter for Variable Reluctance Motor Drives. IEEE Trans. Ind. Appl. 1987, 23, 545–553. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Emadi, A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles: Fundamentals, Theory, and Design, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Akagi, H. Active Harmonic Filters. Proc. IEEE 2005, 93, 2128–2141. [Google Scholar] [CrossRef]
- Pettersson, S.; Salo, M.; Tuusa, H. Four-Wire Current Source Active Power Filter with an Open-Loop Current Control. In Proceedings of the 2007 Power Conversion Conference, Nagoya, Japan, 2–5 April 2007; pp. 542–549. [Google Scholar]
- Vrazic, M.; Vuljaj, D.; Pavasovic, A.; Paukovic, E.H. Study of a vehicle conversion from internal combustion engine to electric drive. In Proceedings of the IEEE ENERGYCON International Energy Conference, Cavtat, Croatia, 13–16 May 2014; pp. 1544–1548. [Google Scholar]
- Van Oorschot, P.; Besselink, I.; Meinders, E.; Nijmeijer, H. Realization and Control of the Lupo EL Electric Vehicle. World Electr. Veh. J. 2012, 5, 14–23. [Google Scholar] [CrossRef]
- Charge Car. 100% Electric Charge Cars. Available online: http://chargecar.org/conversions (accessed on 21 September 2020).
- MIT Electric Vehicle Team. Vehicle: Porsche 914 BEV. Available online: http://web.mit.edu/evt/porsche914.html (accessed on 21 September 2020).
- EV Album. Helder Silva’s 1991 Volvo 460 GLE. Available online: http://www.evalbum.com/1452 (accessed on 21 September 2020).
- Men’s Journal. What You Should Know about Meghan Markle and Prince Harry’s Royal Wedding All-Electric Jaguar. Available online: https://www.mensjournal.com/gear/royal-wedding-electric-jaguar-e-type-concept-zero-meghan-markle-prince-harry/ (accessed on 21 September 2020).
- Pedrosa, D.; Monteiro, V.; Gonçalves, H.; Exposto, B.; Pinto, J.G.; Afonso, J.L. Conversion of an Internal Combustion Engine Vehicle into an Electric Vehicle. In Proceedings of the Annual Seminar on Automation, Industrial Electronics and Instrumentation, Guimarães, Portugal, 11–13 July 2012; pp. 446–451. [Google Scholar]
- Pedrosa, D.; Monteiro, V.; Gonçalves, H.; Martins, J.S.; Afonso, J.L. A Case Study on the Conversion of an Internal Combustion Engine Vehicle into an Electric Vehicle. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Coimbra, Portugal, 27–30 October 2014; pp. 1–5. [Google Scholar]
- Thimmesch, D. Integral Inverter/Battery Charger for Use in Electric Vehicles; USA Department of Energy/NASA: Springfield, VA, USA, 1983. [Google Scholar]
- Thimmesch, D. An SCR Inverter with an Integral Battery Charger for Electric Vehicles. IEEE Trans. Ind. Appl. 1985, 21, 1023–1029. [Google Scholar] [CrossRef]
- Rippel, W.E.; Cocconi, A.G. Integrated Motor Drive and Recharge System. U.S. Patent 5,099,186, 24 March 1992. [Google Scholar]
- Lacroix, S.; Laboure, E.; Hilairet, M. An integrated fast battery charger for Electric Vehicle. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Subotic, I.; Bodo, N.; Levi, E. An EV Drive-Train With Integrated Fast Charging Capability. IEEE Trans. Power Electron. 2016, 31, 1461–1471. [Google Scholar] [CrossRef]
- Chang, H.-C.; Liaw, C.-M. Development of a Compact Switched-Reluctance Motor Drive for EV Propulsion With Voltage-Boosting and PFC Charging Capabilities. IEEE Trans. Veh. Technol. 2009, 58, 3198–3215. [Google Scholar] [CrossRef]
- Haghbin, S.; Guillen, I.S. Integrated motor drive and non-isolated battery charger based on the torque cancelation in the motor. In Proceedings of the IEEE Power Electronics and Drive Systems, Kitakyushu, Japan, 22–25 April 2013; pp. 824–829. [Google Scholar]
- Haghbin, S.; Thiringer, T.; Carlson, O. An integrated split-phase dual-inverter permanent magnet motor drive and battery charger for grid-connected electric or hybrid vehicles. In Proceedings of the International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 1941–1947. [Google Scholar]
- Haghbin, S.; Lundmark, S.; Alakula, M.; Carlson, O. Grid-Connected Integrated Battery Chargers in Vehicle Applications: Review and New Solution. IEEE Trans. Ind. Electron. 2012, 60, 459–473. [Google Scholar] [CrossRef]
- Su, G.J.; Tang, L. Current source inverter based traction drive for EV battery charging applications. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Haghbin, S.; Khan, K.; Lundmark, S.; Alaküla, M.; Carlson, O.; Leksell, M.; Wallmark, O. Integrated chargers for EV’s and PHEV’s: Examples and new solutions. In Proceedings of the International Conference on Electrical Machines, Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar]
- Haghbin, S.; Ghorbani, R.; Bermejo, A.; Guillen, I.S. An Integrated Motor Drive and Battery Fast Charger Station for Plug-in Vehicles. In Proceedings of the 13th Spanish Portuguese Conference on Electrical Engineering, Valencia, Spain, 3–5 July 2013. [Google Scholar]
- Hegazy, O.; van Mierlo, J.; Lataire, P. Design and control of bidirectional DC/AC and DC/DC converters for plug-in hybrid electric vehicles. In Proceedings of the International Conference on Power Engineering, Energy and Electrical Drives, Malaga, Spain, 11–13 May 2011; pp. 1–7. [Google Scholar]
- Sousa, L.D.; Silvestre, B.; Bouchez, B. A combined multiphase electric drive and fast battery charger for Electric Vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Haghbin, S.; Carlson, O. Integrated Motor Drive and Non-Isolated Battery Charger Based on the Split-Phase PM Motors for Plug-in Vehicles. J. Eng. 2014, 6, 275–283. [Google Scholar] [CrossRef]
- Dusmez, S.; Khaligh, A. Cost effective solutions to level 3 on-board battery chargers. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Orlando, FL, USA, 5–9 February 2012; pp. 2121–2127. [Google Scholar]
- Cocconi, A.G. Combined Motor Drive and Battery Charge System. U.S. Patent 5,341,075, 23 August 1994. [Google Scholar]
- Zaja, M.; Oprea, M.; Suarez, C.G.; Mathe, L. Electric Vehicle Battery Charging Algorithm Using PMSM Windings and an Inverter as an Active Rectifier. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Coimbra, Portugal, 27–30 October 2014; pp. 1–6. [Google Scholar]
- Surada, R.; Khaligh, A. A novel approach towards integration of propulsion machine inverter with energy storage charger in plug-in hybrid electric vehicles. In Proceedings of the IECON Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 2493–2498. [Google Scholar]
- Bruyère, A.; Sousa, L.D.; Bouchez, B.; Sandulescu, P.; Kestelyn, X.; Semail, E. A multiphase traction/fast-battery-charger drive for electric or plug-in hybrid vehicles: Solutions for control in traction mode. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–7. [Google Scholar]
- Lhomme, W.; Delarue, P.; Kestelyn, X.; Sandulescu, P.; Bruyère, A. Control of a combined multiphase electric drive and battery charger for electric vehicle. In Proceedings of the European Conference on Power Electronics and Applications, Lille, France, 2–6 September 2013; pp. 1–10. [Google Scholar]
- Yilmaz, M.; Krein, P.T. Review of integrated charging methods for plug-in electric and hybrid vehicles. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety, Istanbul, Turkey, 24–27 July 2012; pp. 346–351. [Google Scholar]
- Haghbin, S. Integrated Motor Drives and Battery Chargers for Electric or Plug-in Hybrid Electric Vehicles; Chalmers University of Technology: Gothenburg, Sweden, 2013. [Google Scholar]
- Wang, L.; Liang, J.; Xu, G.; Xu, K.; Song, Z. A novel battery charger for plug-in hybrid electric vehicles. In Proceedings of the IEEE International Conference on Information and Automation, Shenyang, China, 6–8 June 2012; pp. 168–173. [Google Scholar]
- Pollock, C.; Thong, W.K. Low-cost battery-powered switched reluctance drives with integral battery-charging capability. IEEE Trans. Ind. Appl. 2000, 36, 1676–1681. [Google Scholar] [CrossRef]
- Chang, H.-C.; Liaw, C.-M. An Integrated Driving/Charging Switched Reluctance Motor Drive Using Three-Phase Power Module. IEEE Trans. Ind. Electron. 2011, 58, 1763–1775. [Google Scholar] [CrossRef]
- Hu, Y.; Song, X.; Cao, W.; Ji, B. New SR Drive With Integrated Charging Capacity for Plug-In Hybrid Electric Vehicles (PHEVs). IEEE Trans. Ind. Electron. 2014, 61, 5722–5731. [Google Scholar] [CrossRef]
- Hu, Y.; Gan, C.; Cao, W.; Li, C.; Finney, S. Split Converter-Fed SRM Drive for Flexible Charging in EV/HEV Applications. IEEE Trans. Ind. Electron. 2015, 62, 6085–6095. [Google Scholar] [CrossRef]
- Hu, K.-W.; Yi, P.-H.; Liaw, C.-M. An EV SRM Drive Powered by Battery/Supercapacitor with G2V and V2H/V2G Capabilities. IEEE Trans. Ind. Electron. 2015, 62, 4714–4727. [Google Scholar] [CrossRef]
- He, Z.; Zheng, Z.; Hu, H. Power quality in high-speed railway systems. Int. J. Rail Transp. 2016, 4, 71–97. [Google Scholar] [CrossRef]
- Morais, V.A.; Afonso, J.L.; Carvalho, A.S.; Martins, A. New Reactive Power Compensation Strategies for Railway Infrastructure Capacity Increasing. Energies 2020, 13, 4379. [Google Scholar] [CrossRef]
- Krastev, I.; Tricoli, P.; Hillmansen, S.; Chen, M. Future of Electric Railways: Advanced Electrification Systems with Static Converters for ac Railways. IEEE Electrification Mag. 2016, 4, 6–14. [Google Scholar] [CrossRef]
- Tanta, M.; Monteiro, V.; Sousa, T.J.C.; Martins, A.P.; Carvalho, A.S.; Afonso, J.L. Power quality phenomena in electrified railways: Conventional and new trends in power quality improvement toward public power systems. In Proceedings of the International Young Engineers Forum (YEF-ECE), Costa da Caparica, Portugal, 4 May 2018; pp. 25–30. [Google Scholar]
- Gazafrudi, S.M.M.; Langerudy, A.T.; Fuchs, E.F.; Al-Haddad, K. Power Quality Issues in Railway Electrification: A Comprehensive Perspective. IEEE Trans. Ind. Electron. 2014, 62, 3081–3090. [Google Scholar] [CrossRef]
- Uzuka, T. Faster than a Speeding Bullet: An Overview of Japanese High-Speed Rail Technology and Electrification. IEEE Electrification Mag. 2013, 1, 11–20. [Google Scholar] [CrossRef]
- Pinto, J.G.; Tanta, M.; Monteiro, V.; Barros, L.A.M.; Afonso, J.L. Active Power Conditioner Based on a Voltage Source Converter for Harmonics and Negative Sequence Components Compensation in Electrified Railway Systems. In Proceedings of the Transport Research Arena 2018, Vienna, Austria, 16–19 April 2018; pp. 1–10. [Google Scholar]
- Barros, L.A.M.; Tanta, M.; Martins, A.P.; Afonso, J.L.; Pinto, J.G. STATCOM Evaluation in Electrified Railway Using V/V and Scott Power Transformers. In Sustainable Energy for Smart Cities; Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Springer: Berlin/Heidelberg, Germany, 2019; Volume 315. [Google Scholar]
- Tanta, M.; Pinto, J.G.O.; Monteiro, V.; Martins, A.; Carvalho, A.S.; Afonso, J.L. Topologies and Operation Modes of Rail Power Conditioners in AC Traction Grids: Review and Comprehensive Comparison. Energies 2020, 13, 2151. [Google Scholar] [CrossRef]
- Uzuka, T.; Ikedo, S.; Ueda, K. A static voltage fluctuation compensator for AC electric railway. In Proceedings of the IEEE Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004; Volume 3, pp. 1869–1873. [Google Scholar]
- Horita, Y.; Morishima, N.; Kai, M.; Onishi, M.; Masui, T.; Noguchi, M. Single-phase STATCOM for feeding system of Tokaido Shinkansen. In Proceedings of the ECCE Power Electronics Conference, Sapporo, Japan, 21–24 June 2010; pp. 2165–2170. [Google Scholar]
- Tanta, M.; Barros, L.A.M.; Pinto, J.G.; Martins, A.P.; Afonso, J.L. Modular Multilevel Converter in Electrified Railway Systems: Applications of Rail Static Frequency Converters and Rail Power Conditioners. In Proceedings of the International Young Engineers Forum (YEF-ECE), Costa da Caparica, Portugal, 3 July 2020; pp. 55–60. [Google Scholar]
- Tanta, M.; Monteiro, V.; Exposto, B.; Pinto, J.G.; Martins, A.P.; Carvalho, A.S.; Meléndez, A.N.; Afonso, J.L. Simplified rail power conditioner based on a half-bridge indirect AC/DC/AC Modular Multilevel Converter and a V/V power transformer. In Proceedings of the IEEE IECON Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 6431–6436. [Google Scholar]
- Aoki, K.; Kikuchi, K.; Seya, M.; Kato, T. Power Interchange System for Reuse of Regenerative Electric Power. Hitachi Rev. 2018, 67, 71–75. [Google Scholar]
- Nagaura, Y.; Oishi, R.; Shimada, M.; Kaneko, T. Battery-powered Drive Systems: Latest Technologies and Outlook. Hitachi Rev. 2017, 66, 138–144. [Google Scholar]
- Agirre, X.; Abad, G. Railway traction. In Power Electronics and Electric Drives for Traction Applications; Abad, G., Ed.; Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- Hayashiya, H.; Kondo, K. Recent trends in power electronics applications as solutions in electric railways. IEEJ Trans. Electr. Electron. Eng. 2020, 15, 632–645. [Google Scholar] [CrossRef]
- Arboleya, P.; Bidaguren, P.; Armendariz, U. Energy Is On Board: Energy Storage and Other Alternatives in Modern Light Railways. IEEE Electrification Mag. 2016, 4, 30–41. [Google Scholar] [CrossRef]
- Okui, A.; Hase, S.; Shigeeda, H.; Konishi, T.; Yoshi, T. Application of energy storage system for railway transportation in Japan. In Proceedings of the ECCE International Power Electronics Conference, Sapporo, Japan, 21–24 June 2010; pp. 3117–3123. [Google Scholar]
- Hayashiya, H.; Yoshizumi, H.; Suzuki, T.; Furukawa, T.; Kondoh, T.; Kitano, M.; Aoki, T.; Ishii, T.; Kurosawa, N.; Miyagawa, T. Necessity and possibility of smart grid technology application on railway power supply system. In Proceedings of the European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–10. [Google Scholar]
- Yang, X.; Lin, Z.; Ding, J.; Long, Z. Lifetime Prediction of IGBT Modules in Suspension Choppers of Medium/Low-Speed Maglev Train Using an Energy-Based Approach. IEEE Trans. Power Electron. 2018, 34, 738–747. [Google Scholar] [CrossRef]
- Abdelrahman, A.S.; Sayeed, J.; Youssef, M.Z. Hyperloop Transportation System: Analysis, Design, Control, and Implementation. IEEE Trans. Ind. Electron. 2017, 65, 7427–7436. [Google Scholar] [CrossRef]
- Winter, J.; Mayer, S.; Kaimer, S.; Seitz, P.; Pagenkopf, J.; Streit, S. Inductive power supply for heavy rail vehicles. In Proceedings of the International Electric Drives Production Conference (EDPC), Nuremberg, Germany, 29–30 October 2013; pp. 1–9. [Google Scholar]
- Guerrieri, M. Catenary-Free Tramway Systems: Functional and Cost–Benefit Analysis for a Metropolitan Area. Urban Rail Transit 2019, 5, 289–309. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, B.-S.; Lee, J.-H.; Lee, S.-H.; Park, C.-B.; Jung, S.-M.; Lee, S.-G.; Yi, K.-P.; Baek, J. Development of 1-MW Inductive Power Transfer System for a High-Speed Train. IEEE Trans. Ind. Electron. 2015, 62, 6242–6250. [Google Scholar] [CrossRef]
- McCoy, T.J. Electric Ships Past, Present, and Future [Technology Leaders]. IEEE Electrification Mag. 2015, 3, 4–11. [Google Scholar] [CrossRef]
- Sulligoi, G.; Vicenzutti, A.; Menis, R. All-Electric Ship Design: From Electrical Propulsion to Integrated Electrical and Electronic Power Systems. IEEE Trans. Transp. Electrification 2016, 2, 507–521. [Google Scholar] [CrossRef]
- Al-Falahi, M.D.A.; Tarasiuk, T.; Jayasinghe, S.D.G.; Jin, Z.; Enshaei, H.; Guerrero, J. AC Ship Microgrids: Control and Power Management Optimization. Energies 2018, 11, 1458. [Google Scholar] [CrossRef]
- D’Agostino, F.; Fidigatti, A.; Ragaini, E.; Silvestro, F. Integration of Shipboard Microgrids Within Land Distribution Networks: Employing a Ship Microgrid to Meet Critical Needs. IEEE Electrification Mag. 2019, 7, 69–80. [Google Scholar] [CrossRef]
- Shakeri, N.; Zadeh, M.K.; Nielsen, J.B. Hydrogen Fuel Cells for Ship Electric Propulsion: Moving Toward Greener Ships. IEEE Electrification Mag. 2020, 8, 27–43. [Google Scholar] [CrossRef]
- Sulligoi, G.; Bosich, D.; Vicenzutti, A.; Khersonsky, Y. Design of Zonal Electrical Distribution Systems for Ships & Oil Platforms: Control Systems and Protections. IEEE Trans. Ind. Appl. 2020, 56, 5656–5669. [Google Scholar]
- AlAfnan, H.; Zhang, M.; Yuan, W.; Zhu, J.; Li, J.; Elshiekh, M.; Li, X. Stability Improvement of DC Power Systems in an All-Electric Ship Using Hybrid SMES/Battery. IEEE Trans. Appl. Supercond. 2018, 28, 1–6. [Google Scholar] [CrossRef]
- Balsamo, F.; De Falco, P.; Mottola, F.; Pagano, M. Power Flow Approach for Modeling Shipboard Power System in Presence of Energy Storage and Energy Management Systems. IEEE Trans. Energy Convers. 2020, 8969, 1. [Google Scholar] [CrossRef]
- Sarlioglu, B.; Morris, C.T. More Electric Aircraft: Review, Challenges, and Opportunities for Commercial Transport Aircraft. IEEE Trans. Transp. Electrification 2015, 1, 54–64. [Google Scholar] [CrossRef]
- Madonna, V.; Giangrande, P.; Galea, M. Electrical Power Generation in Aircraft: Review, Challenges, and Opportunities. IEEE Trans. Transp. Electrification 2018, 4, 646–659. [Google Scholar] [CrossRef]
- Bozhko, S.; Yang, T.; Le Peuvedic, J.-M.; Arumugam, P.; Degano, M.; La Rocca, A.; Xu, Z.; Rashed, M.; Fernando, W.; Hill, C.I.; et al. Development of Aircraft Electric Starter–Generator System Based on Active Rectification Technology. IEEE Trans. Transp. Electrification 2018, 4, 985–996. [Google Scholar] [CrossRef]
- Wu, S.; Tian, C.; Zhao, W.; Zhou, J.; Zhang, X. Design and Analysis of an Integrated Modular Motor Drive for More Electric Aircraft. IEEE Trans. Transp. Electrification 2020, 6, 1412–1420. [Google Scholar] [CrossRef]
- Wang, S.; Cui, X.; Ma, S.; Pang, Z.; Feng, Y.; Zhang, S. A Design Method of Air-Cooled Radiator Based on Electric Aircraft Controller. IEEE Access 2020, 8, 60270–60278. [Google Scholar] [CrossRef]
- Heinrich, M.T.E.; Kelch, F.; Magne, P.; Emadi, A. Regenerative Braking Capability Analysis of an Electric Taxiing System for a Single Aisle Midsize Aircraft. IEEE Trans. Transp. Electrification 2015, 1, 298–307. [Google Scholar] [CrossRef]
- Flynn, M.-C.; Jones, C.E.; Norman, P.J.; Burt, G.M. A Fault Management-Oriented Early-Design Framework for Electrical Propulsion Aircraft. IEEE Trans. Transp. Electrification 2019, 5, 465–478. [Google Scholar] [CrossRef]
- Jones, C.E.; Norman, P.J.; Sztykiel, M.; Alzola, R.P.; Burt, G.M.; Galloway, S.J.; Kawashita, L.F.; Hallett, S.R. Electrical and Thermal Effects of Fault Currents in Aircraft Electrical Power Systems with Composite Aerostructures. IEEE Trans. Transp. Electrification 2018, 4, 660–670. [Google Scholar] [CrossRef]
- Jiang, J.; Wang, K.; Chen, L.; Cotton, I.; Chen, J.; Chen, J.; Zhang, C. Optical Sensing of Partial Discharge in More Electric Aircraft. IEEE Sens. J. 2020, 20, 12723–12731. [Google Scholar] [CrossRef]
- Zhu, R.; Huang, Z.; Dinavahi, V. A Universal Wideband Device-Level Parallel Simulation Method and Conducted EMI Analysis for More Electric Aircraft Microgrid. IEEE J. Emerg. Sel. Top. Ind. Electron. 2020, 1, 162–171. [Google Scholar] [CrossRef]
- Siemens Mobility GmbH. Background Information: EHighway—The Backbone for Electrified Freight Transport by Road. Munich. 2019. Available online: https://assets.new.siemens.com/siemens/assets/api/uuid:5e482791-554d-4d84-84f8-943eab9e4be9/background-ehighway-solution-e.pdf (accessed on 30 July 2020).
- Felez, J.; Garcia-Sanchez, C.; Lozano, J.A. Control Design for an Articulated Truck with Autonomous Driving in an Electrified Highway. IEEE Access 2018, 6, 60171–60186. [Google Scholar] [CrossRef]
- Pham, T.H.; Kessels, J.T.B.A.; van den Bosch, P.P.J.; Huisman, R.G.M. Analytical Solution to Energy Management Guaranteeing Battery Life for Hybrid Trucks. IEEE Trans. Veh. Technol. 2016, 65, 7956–7971. [Google Scholar] [CrossRef]
- Cruzat, V.; Valenzuela, M.A. Modeling and Evaluation of Benefits of Trolley Assist System for Mining Trucks. IEEE Trans. Ind. Appl. 2018, 54, 3971–3981. [Google Scholar] [CrossRef]
- Cruzat, J.V.; Valenzuela, M.A. Integrated Modeling and Evaluation of Electric Mining Trucks during Propel and Retarding Modes. IEEE Trans. Ind. Appl. 2018, 54, 6586–6597. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Y.; Ai, Z.; Feng, Y.; Cheng, W.; Hu, Z. Energy Saving Control Strategy for the High-Frequency Start-up Process for Electric Mining Haul Trucks. IEEE Trans. Intell. Veh. 2018, 3, 595–606. [Google Scholar] [CrossRef]
- Hu, Y.; Gan, C.; Sun, Q.; Li, P.; Wu, J.; Wen, H. Modular Tri-Port High-Power Converter for SRM Based Plug-in Hybrid Electrical Trucks. IEEE Trans. Power Electron. 2017, 33, 3247–3257. [Google Scholar] [CrossRef]
- Bartlomiejczyk, M. Driving Performance Indicators of Electric Bus Driving Technique: Naturalistic Driving Data Multicriterial Analysis. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1442–1451. [Google Scholar] [CrossRef]
- Meishner, F.; Sauer, D.U. Technical and economic comparison of different electric bus concepts based on actual demonstrations in European cities. IET Electr. Syst. Transp. 2020, 10, 144–153. [Google Scholar] [CrossRef]
- Otto, K.; Vepsäläinen, J.; Tammi, K. Stochastic Driving Cycle Synthesis for Analyzing the Energy Consumption of a Battery Electric Bus. IEEE Access 2018, 6, 55586–55598. [Google Scholar]
- El-Taweel, N.A.; Farag, H.E.Z.; Mohamed, M. Integrated Utility-Transit Model for Optimal Configuration of Battery Electric Bus Systems. IEEE Syst. J. 2020, 14, 738–748. [Google Scholar] [CrossRef]
- Gkiotsalitis, K. Bus Holding of Electric Buses with Scheduled Charging Times. IEEE Trans. Intell. Transp. Syst. 2020, 1–12. [Google Scholar] [CrossRef]
- Nicolaides, D.; Madhusudhanan, A.K.; Na, X.; Miles, J.; Cebon, D. Technoeconomic Analysis of Charging and Heating Options for an Electric Bus Service in London. IEEE Trans. Transp. Electrification 2019, 5, 769–781. [Google Scholar] [CrossRef]
- Zhou, G.-J.; Xie, D.-F.; Zhao, X.; Lu, C. Collaborative Optimization of Vehicle and Charging Scheduling for a Bus Fleet Mixed with Electric and Traditional Buses. IEEE Access 2020, 8, 8056–8072. [Google Scholar] [CrossRef]
- Tian, X.; He, R.; Xu, Y. Design of an Energy Management Strategy for a Parallel Hybrid Electric Bus Based on an IDP-ANFIS Scheme. IEEE Access 2018, 6, 23806–23819. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Z.; Shi, J.; Lin, C.; Gao, Y. Optimization of a Dual-Motor Coupled Powertrain Energy Management Strategy for a Battery Electric Bus Based on Dynamic Programming Method. IEEE Access 2018, 6, 32899–32909. [Google Scholar] [CrossRef]
- Jang, Y.J.; Suh, E.S.; Kim, J.W. System Architecture and Mathematical Models of Electric Transit Bus System Utilizing Wireless Power Transfer Technology. IEEE Syst. J. 2016, 10, 495–506. [Google Scholar] [CrossRef]
- Yaïci, W.; Kouchachvili, L.; Entchev, E.; Longo, M. Performance Analysis of Battery/Supercapacitor Hybrid Energy Source for the City Electric Buses and Electric Cars. In Proceedings of the IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar]
- Lacressonniere, F.; Cassoret, B. Converter used as a battery charger and a motor speed controller in an industrial truck. Eur. Conf. Power Electron. Appl. 2005, 9, 7. [Google Scholar]
- Xia, W.; Zhao, D.A.; Hua, M.; Han, J. Research on switched reluctance motor drive system for the electric forklift based on DSP and μC/OS. Int. Conf. Electr. Control Eng. ICECE 2010, 1, 4132–4135. [Google Scholar]
- Terzic, M.V.; Bilgin, B.; Emadi, A. Switched Reluctance Motor Design for a Forklift Traction Application. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 812–818. [Google Scholar]
- Minav, T.A.; Pyrhonen, J.J.; Laurila, L.I.E. Induction machine drive in energy efficient industrial forklift. In Proceedings of the International Symposium on Power Electronics Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 20–22 June 2012; pp. 415–419. [Google Scholar]
- Minav, T.A.; Pyrhonen, J.J.; Laurila, L.I.E. Permanent Magnet Synchronous Machine Sizing: Effect on the Energy Efficiency of an Electro-Hydraulic Forklift. IEEE Trans. Ind. Electron. 2011, 59, 2466–2474. [Google Scholar] [CrossRef]
- Minav, T.A.; Laurila, L.I.E.; Pyrhonen, J.J. Effect of driving electric machine type on the system efficiency of an industrial forklift. In Proceedings of the International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 1964–1970. [Google Scholar]
- Kim, T.-H.; Lee, S.-J.; Choi, W. Design and Control of the Phase Shift Full Bridge Converter for the On-board Battery Charger of Electric Forklifts. J. Power Electron. 2012, 12, 113–119. [Google Scholar] [CrossRef]
- Dezza, F.C.; Musolino, V.; Piegari, L.; Rizzo, R. Hybrid battery–supercapacitor system for full electric forklifts. IET Electr. Syst. Transp. 2019, 9, 16–23. [Google Scholar] [CrossRef]
- Zhang, Z.; Mortensen, H.H.; Jensen, J.V.; Andersen, M.A.E. Fuel Cell and Battery Powered Forklifts. In Proceedings of the 2013 IEEE Vehicle Power and Propulsion Conference (VPPC), Beijing, China, 15–18 October 2013; pp. 1–5. [Google Scholar]
- Pacheco, D.S.; Gonzalez, L.G.; Espinoza, J.L.; Campoverde, C.J. Energy Consumption of an Electric Forklift Truck: Alternative with Fuel Cell and Supercapacitor. In Proceedings of the IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 13–15 November 2019; pp. 1–6. [Google Scholar]
- Minav, T.; Immonen, P.; Laurila, L.; Vtorov, V.; Pyrhönen, J.; Niemelä, M. Electric energy recovery system for a hydraulic forklift – theoretical and experimental evaluation. IET Electric Power Appl. 2011, 5, 377. [Google Scholar] [CrossRef]
- Ceraolo, M.; Lutzemberger, G.; Scarpelli, C.; Bonelli, G.P.; Piazza, T. Hybridisation of forklift trucks. IET Electr. Syst. Transp. 2020, 10, 116–123. [Google Scholar] [CrossRef]
- Li, J.; Lutzemberger, G.; Poli, D.; Scarpelli, C.; Piazza, T. Simulation and experimental validation of a hybrid forklift truck. In Proceedings of the AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Torino, Italy, 2–4 July 2019; pp. 1–6. [Google Scholar]
- Hyodo, J.; Aoshima, I.; Nakamura, A.; Saito, N.; Matsuo, R. Development of electric drive system for small vehicles. In Proceedings of the World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–5. [Google Scholar]
- Wijesekera, A.; Binduhewa, P. Impact of Electric Motorcycles on Distribution Network and Design of a Charger for Electric Motorcycles. In Proceedings of the IEEE Region 10 Humanitarian Technology Conference (R10-HTC), Malambe, Sri Lanka, 6–8 December 2018; pp. 1–6. [Google Scholar]
- Ruensumruay, S.; Pattaraprakorn, W.; Chutiprapat, V.; Bhasaputra, P. The study on the effect of electric motorcycle to energy consumption in Thailand. In Proceedings of the 2016 13th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, 28 June–1 July 2016; pp. 1–4. [Google Scholar]
- Mou, T.L.; Kin, W.P.; Cheong, W.H.; Hangyuan, L.; Zhengchao, X. A Case Study on Testing and Performance Evaluation of Electric Motorcycles to Discuss the Environmental Impact of Urban Area in Macao. In Proceedings of the International Conference on Intelligent System Design and Engineering Applications, Hong Kong, China, 16–18 January 2013; pp. 9–12. [Google Scholar]
- Weigl, J.D.; Saidi, H. Design, testing and optimisation of a hydrogen fuel cell motorcycle for South East Asia. In Proceedings of the Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 27–30 March 2013; pp. 1–4. [Google Scholar]
- Xuan, P.Y.; Henz, M.; Weigl, J.D. Environmental impact of converted electrical motorcycle. World Electr. Veh. J. 2013, 6, 1136–1143. [Google Scholar] [CrossRef]
- Marinov, M.; Valchev, V.; Stoyanov, R.; Andreev, P. An Approach to the Electrical Sizing of the Electric Motorcycle Drive. In Proceedings of the International Symposium on Electrical Apparatus and Technologies (SIELA), Bourgas, Bulgaria, 3–6 June 2018; pp. 1–4. [Google Scholar]
- Ravigan, F.; Alboteanu, L.; Dumitriu, M.; Zglimbea, I. BLDC Controller for two-wheel vehicles. In Proceedings of the International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 4–6 October 2018; pp. 1–4. [Google Scholar]
- Kumar, V.N.; Syed, A.; Kuruganti, D.; Egoor, A.; Vemuri, S. Measurement of position (angle) information of BLDC motor for commutation used for e-bike. In Proceedings of the International Conference on Advanced Electronic Systems (ICAES), Pilani, India, 21–23 September 2013; pp. 316–318. [Google Scholar]
- Lopes, S.J.; Gattelu, A.; Ghosalkar, A.; Gonsalves, S. Environment Friendly booster bike. In Proceedings of the International Conference on Smart City and Emerging Technology (ICSCET), Mumbai, India, 5 January 2018; pp. 1–5. [Google Scholar]
- Pa, P.S.; Chang, S.C. Model Analysis and Performance Assessment of Electrical Motorcycles. In Proceedings of the International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009; pp. 644–647. [Google Scholar]
- Drummond, E.; Condro, P.; Cotton, B.; Cox, C.; Pinegar, A.; Vickery, K.; Prins, R. Design and Construction of an Electric Motorcycle. In Proceedings of the Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 26 April 2019; pp. 1–6. [Google Scholar]
- Wheeler, P.; Blissett, J.; Fabra, M.G. Electric superbike racing—The design and construction of a championship winning electric superbike. In Proceedings of the International Conference on Power Electronics Systems and Applications—Smart Mobility, Power Transfer & Security (PESA), Hong Kong, China, 12–14 December 2017; pp. 1–5. [Google Scholar]
- Masoud, M.; Elhenawy, M.; Almannaa, M.H.; Liu, S.Q.; Glaser, S.; Rakotonirainy, A. Heuristic Approaches to Solve E-Scooter Assignment Problem. IEEE Access 2019, 7, 175093–175105. [Google Scholar] [CrossRef]
- Corno, M.; Savaresi, S.M. Design and Control of an All-in-the-Wheel Assisted Kick Scooter. IEEE/ASME Trans. Mech. 2016, 21, 1858–1867. [Google Scholar] [CrossRef]
- Hsu, Y.-C.; Kao, S.-C.; Ho, C.-Y.; Jhou, P.-H.; Lu, M.-Z.; Liaw, C.-M. On an Electric Scooter With G2V/V2H/V2G and Energy Harvesting Functions. IEEE Trans. Power Electron. 2017, 33, 6910–6925. [Google Scholar] [CrossRef]
- Hu, J.-S.; Lu, F.; Zhu, C.; Cheng, C.-Y.; Chen, S.-L.; Ren, T.-J.; Mi, C.C. Hybrid Energy Storage System of an Electric Scooter Based on Wireless Power Transfer. IEEE Trans. Ind. Inform. 2018, 14, 4169–4178. [Google Scholar] [CrossRef]
- Afonso, J.A.; Rodrigues, F.J.; Pedrosa, D.; Afonso, J.L. Mobile Sensing System for Cycling Power Output Control; CONTROLO, Garrido, P., Soares, F., Moreira, A., Eds.; Lecture Notes in Electrical Engineering; Springer: Cham, Switzerland, 2016; Volume 402. [Google Scholar]
- Corno, M.; Giani, P.; Tanelli, M.; Savaresi, S.M. Human-in-the-Loop Bicycle Control via Active Heart Rate Regulation. IEEE Trans. Control Syst. Technol. 2015, 23, 1029–1040. [Google Scholar] [CrossRef]
- Apostolou, G.; Reinders, A.; Geurs, K. An overview of existing experiences with solar-powered e-bicycles. Energies 2018, 11, 2129. [Google Scholar] [CrossRef]
- Mouli, G.R.C.; van Duijsen, P.; Grazian, F.; Jamodkar, A.; Bauer, P.; Isabella, O. Sustainable E-Bicycle Charging Station That Enables AC, DC and Wireless Charging from Solar Energy. Energies 2020, 13, 3549. [Google Scholar] [CrossRef]
- Directive 2002/24/EC of the European Parliament. Available online: https://op.europa.eu/en/publication-detail/-/publication/57ffec78-c753-4f54-a340-67b9200d4b66/language-en/format-PDF (accessed on 30 July 2020).
- Bolton, J.O. Electrical Bicycle. U.S. Patent 552,271, 31 December 1895. [Google Scholar]
- Starschich, E.; Muetze, A. Comparison of the performances of different geared brushless-DC motor drives for electric bicycles. In Proceedings of the IEEE International Electric Machines & Drives Conference 2007, Antalya, Turkey, 3–5 May 2007; Volume 1, pp. 140–147. [Google Scholar]
- Lin, J.; Schofield, N.; Emadi, A. External-Rotor 6-10 Switched Reluctance Motor for an Electric Bicycle. IEEE Trans. Transp. Electrif. 2015, 1, 348–356. [Google Scholar] [CrossRef]
- Kim, Y.; Rhyu, S.-H.; Jung, I.-S. Parameter determination of the BLDC motor considering the dynamic equation of vehicle. In Proceedings of the International Conference on Electrical Machines-ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–4. [Google Scholar]
- Hub-Drive vs. Mid-Drive e-Bicycles: What to Know before Buying. Available online: https://www.bosch-ebicycle.com/ca/everything-about-the-ebicycle/stories/hub-drive-vs-mid-drive-ebicycles/ (accessed on 30 July 2020).
- Hub Motors vs. Mid Drives. Available online: https://www.pedegoelectricbicycles.com/info/ (accessed on 30 July 2020).
- Afonso, J.A.; Rodrigues, F.J.; Pedrosa, D.D.R.; Afonso, J.L. Automatic Control of Cycling Effort Using Electric Bicycles and Mobile Devices. In Proceedings of the World Congress on Engineering (WCE 2015), London, UK, 1–3 July 2015. [Google Scholar]
- Eisenman, S.B.; Miluzzo, E.; Lane, N.D.; Peterson, R.A.; Ahn, G.-S.; Campbell, A.T. The BikeNet Mobile Sensing System for Cyclist Experience Mapping. In Proceeding of the 5th International Conference on Embedded Networked Sensor Systems (SenSys 2007), Sydney, Australia, 6–9 November 2007; pp. 87–101. [Google Scholar]
- Abhilash, D.; Wani, I.; Joseph, K.; Jha, R.; Haneesh, K. Power Efficient e-Bicycle with Terrain Adaptive Intelligence. In Proceedings of the International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 17–19 July 2019; pp. 1148–1153. [Google Scholar]
- RENOWATT 4.1. Available online: https://www.coluer.com/catalogue/renowatt_41/?lang=en (accessed on 30 July 2020).
- Herath, N.; Binduhewa, P.; Samaranayake, L.; Ekanayake, J.; Longo, S. Design of a dual energy storage power converter for a small electric vehicle. In Proceedings of the IEEE International Conference on Industrial and Information Systems (ICIIS), Peradeniya, Sri Lanka, 15–16 December 2017; pp. 1–6. [Google Scholar]
- Moraes, C.G.; Lazzarin, T.B. A Two-Stage Battery Charger with Active Power Decoupling Cell for Small Electric Vehicles. In Proceedings of the IEEE 15th Brazilian Power Electronics Conference and 5th IEEE Southern Power Electronics Conference (COBEP/SPEC), Santos, Brazil, 1–4 December 2019; pp. 1–6. [Google Scholar]
- Jeong, Y.; Park, J.-D.; Rorrer, R.; Kim, K.-W.; Lee, B.-H. A Novel Multi-input and Single-output DC/DC Converter for Small Unmanned Aerial Vehicle. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 1302–1308. [Google Scholar]
- Guha, B.; Haddad, R.J.; Kalaani, Y. Performance impact analysis of solar cell retrofitted electric golf cart. In Proceedings of the Conference SoutheastCon, Fort Lauderdale, FL, USA, 9–12 April 2015; pp. 1–2. [Google Scholar]
- Fan, J. Solar Powered Golf Cart: Testing and Performance Analyses. In Proceedings of the International Conference on Green Energy and Applications (ICGEA), Singapore, 24–26 March 2018; pp. 74–78. [Google Scholar]
- Trivedi, N.; Gujar, N.S.; Sarkar, S.; Pundir, S.P.S. Smart Solar Charge Controller for Electric Golf Cart Promoting Green Transportation. In Proceedings of the IEEE Punecon, Pune, India, 30 November–2 December 2018; pp. 1–6. [Google Scholar]
- Musslem, R.; Almehdar, W.; Diwan, G.; Bensenouci, A.; Munawwar, S. Solar Powered Golf Cart System for On-Campus University Use. In Proceedings of the IEEE 10th GCC Conference & Exhibition (GCC), Kuwait, 19–23 April 2019; pp. 1–6. [Google Scholar]
- Chao, C.-H. Simulation of a fuel cell-battery-ultra capacitor-hybrid-powered electric golf cart. In Proceedings of the International Conference on Systems and Informatics (ICSAI), Shanghai, China, 2–4 November 2019; pp. 1610–1615. [Google Scholar]
- Imawati, I.; Wijaya, F.D.; Sugiyantoro, B. Design and Simulation of Three Phase Squirrel Cage Induction Motor in Low Voltage System 48 V 50 Hz 3 Hp for Electric Golf Cart. In Proceedings of the International Conference on Information Technology and Electrical Engineering (ICITEE), Pattaya, Thailand, 10–11 October 2019; Volume 7, pp. 1–6. [Google Scholar]
- Harris, M. What comes first. Eng. Technol. 2009, 4, 28–29. [Google Scholar] [CrossRef]
- Draz, M.U.; Ali, M.S.; Majeed, M.; Ejaz, U.; Izhar, U. Segway electric vehicle. In Proceedings of the International Conference of Robotics and Artificial Intelligence, Rawalpindi, Pakistan, 22–23 October 2012; pp. 34–39. [Google Scholar]
- Babazadeh, R.; Khiabani, A.G.; Azmi, H. Optimal control of Segway personal transporter. In Proceedings of the International Conference on Control, Instrumentation, and Automation (ICCIA), Qazvin, Iran, 27–28 January 2016; pp. 18–22. [Google Scholar]
- Cardozo, G.S.S.; Vera, L.M.S. Prototype for a Self-Balanced Personal Transporter. In Proceedings of the Workshop on Engineering Applications, Bogota, Columbia, 2–4 May 2012; pp. 1–6. [Google Scholar]
- Mohtasib, A.M.; Shawar, M.H. Self-balancing two-wheel electric vehicle (STEVE). In Proceedings of the International Symposium on Mechatronics and Its Applications (ISMA), Amman, Jordan, 9–11 April 2013; pp. 1–8. [Google Scholar]
- Khan, A.R.; Khan, M.A.; Zubair, A.; Irshad, S.F. Two Wheel Self-Balancing Human Carrier. In Proceedings of the IEEE 21st International Multi-Topic Conference (INMIC), Karachi, Pakistan, 1–2 November 2018; pp. 1–4. [Google Scholar]
- Yiangkamolsing, C.; Laoonual, Y.; Channarong, S.; Katikawong, W.; Sasawat, P.; Yaotanee, B. A Development of Electric Tuk Tuk Conversion in Thailand. In Proceedings of the IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Seogwipo-si, Korea, 8–10 May 2019; pp. 1–8. [Google Scholar]
- Onose, B.; Hanek, M.A.; Vătăşelu, G.; Demeter, L.N. Advanced modular photovoltaic system for Plug-in Small Electric Vehicles (PsEV). In Proceedings of the Electric Vehicles International Conference (EV), Bucharest, Romania, 5–6 October 2017; pp. 1–4. [Google Scholar]
- Vázquez-Rodríguez, E.A.; Perez-Pinal, F.J.; Bautista-Camino, P.; Rodríguez-Licea, M.A. The Rollover Risk and its Mitigation in Rickshaws. In Proceedings of the IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 14–16 November 2018; pp. 1–6. [Google Scholar]
- Awal, M.R.; Rahman, M.M.; Islam, A.K.M.N.; Al-Hossain, J.; Khan, M.Z.R. Energy Consumption Analysis of Electric Three Wheelers in Bangladesh. In Proceedings of the IEEE International Conference on Power, Electrical, and Electronics and Industrial Applications (PEEIACON), Dhaka, Bangladesh, 29 November–1 December 2019; pp. 35–38. [Google Scholar]
- Uddin, M.R.; Tasneem, Z.; Annie, S.I.; Salim, K.M. A high capacity synchronous buck converter for highly efficient and lightweight charger of electric easy bikes. In Proceedings of the International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’s Bazar, Bangladesh, 16–18 February 2017; pp. 392–395. [Google Scholar]
- Ding, D.; Cooper, R.A. Electric powered wheelchairs. IEEE Control. Syst. 2005, 25, 22–34. [Google Scholar]
- Galvan, E.; Gonzalez, G.; Hernandez, G.; Manon, S.; Ponce, H. Electric wheelchair module: Converting a mechanical to an electric wheelchair. In Proceedings of the IEEE Mexican Humanitarian Technology Conference (MHTC), Puebla, Mexico, 29–31 March 2017; pp. 70–74. [Google Scholar]
- Podobnik, J.; Rejc, J.; Slajpah, S.; Munih, M.; Mihelj, M. All-Terrain Wheelchair: Increasing Personal Mobility with a Powered Wheel-Track Hybrid Wheelchair. IEEE Robot. Autom. Mag. 2017, 24, 26–36. [Google Scholar] [CrossRef]
- Tanohata, N.; Murakami, H.; Seki, H. Battery friendly driving control of Electric power-assisted wheelchair based on fuzzy algorithm. In Proceedings of the SICE Annual Conference, Taipei, Taiwan, 18–21 August 2010; pp. 1595–1598. [Google Scholar]
- Park, J.W.; Im, W.S.; Kim, D.Y.; Kim, J.M. Safe driving algorithm of the electric wheelchair with model following control. In Proceedings of the European Conference on Power Electronics and Applications, Lappeenranta, Finland, 26–28 August 2014; pp. 1–10. [Google Scholar]
- de Lima Neto, A.N.; Pomilio, J.A. Model, Simulation and Analysis of BLDCM for a Differential Controlled Electric-Powered Wheelchair. In Proceedings of the IEEE 15th Brazilian Power Electronics Conference and 5th IEEE Southern Power Electronics Conference (COBEP/SPEC), Santos, Brazil, 1–4 December 2019; pp. 1–6. [Google Scholar]
- Fernandes, J.F.P.; Vieira, S.M.; Branco, P.C. Multiobjective Optimization of a Shell-Like Induction Spherical Motor for a Power-Assisted Wheelchair. IEEE Trans. Energy Convers. 2017, 33, 660–669. [Google Scholar] [CrossRef]
- Takahashi, K.; Seki, H.; Tadakuma, S. Safety Driving Control for Electric Power Assisted Wheelchair Based on Regenerative Brake. In Proceedings of the IEEE International Conference on Industrial Technology, Mumbai, India, 15–17 December 2006; pp. 2492–2497. [Google Scholar]
- Takahashi, Y.; Seki, H. Capacitor regenerative braking system of electric wheelchair for senior citizen based on variable frequency chopper control. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 6062–6067. [Google Scholar]
- Aromal, V.; Gokulnath, G.L.; Amrithesh, M.S.; Arun, B.; PK, A.V.; Pandi, V.R. Design and Implementation of a Solar Integration in Electric Wheelchair. In Proceedings of the International Conference for Convergence in Technology (I2CT), Mangalore, India, 27–28 October 2018; pp. 1–6. [Google Scholar]
- Azad, A.; Tavakoli, R.; Pratik, U.; Varghese, B.; Coopmans, C.; Pantic, Z. A Smart Autonomous WPT System for Electric Wheelchair Applications with Free-Positioning Charging Feature. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3516–3532. [Google Scholar] [CrossRef]










































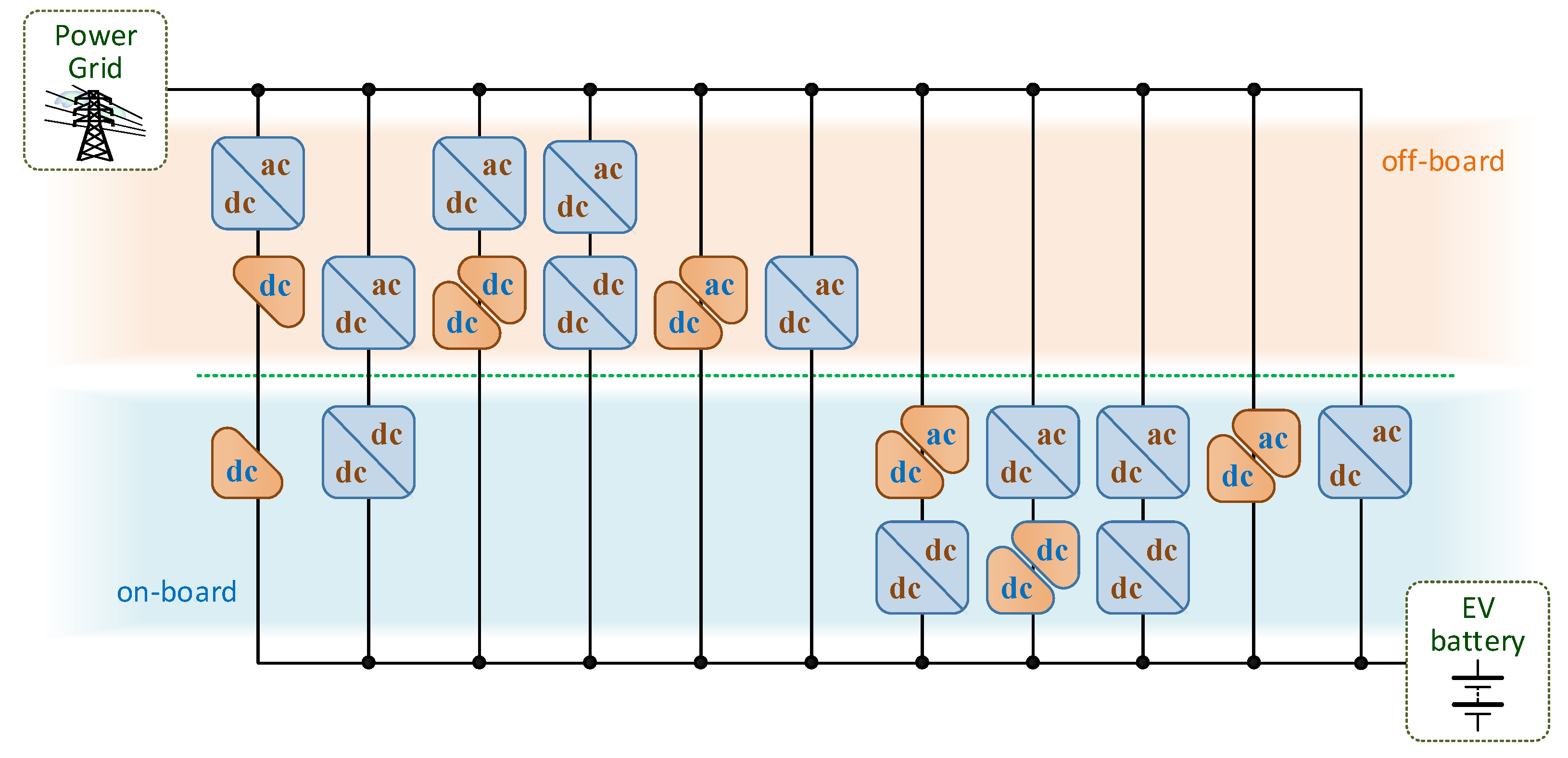{kind=link}
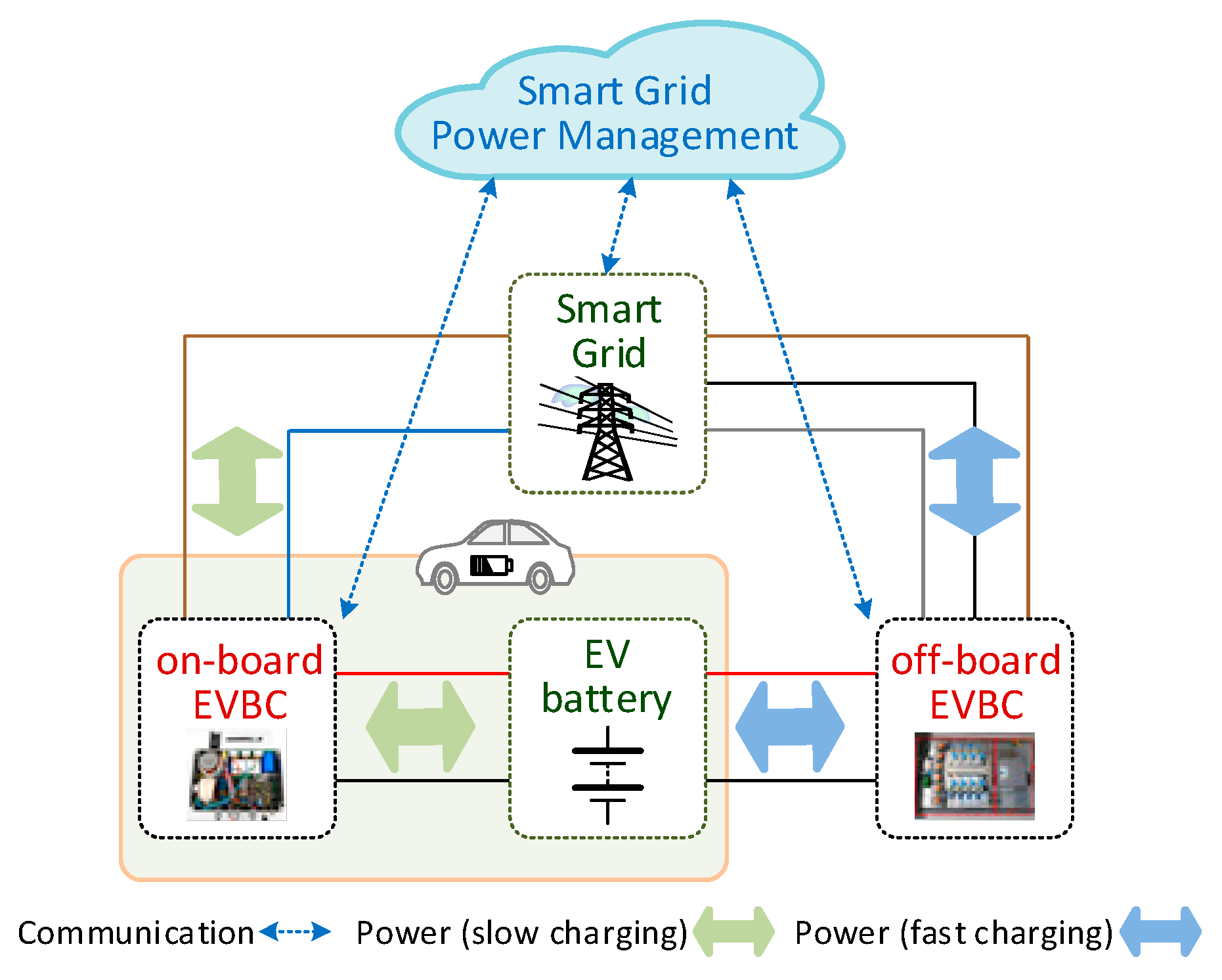{kind=link}
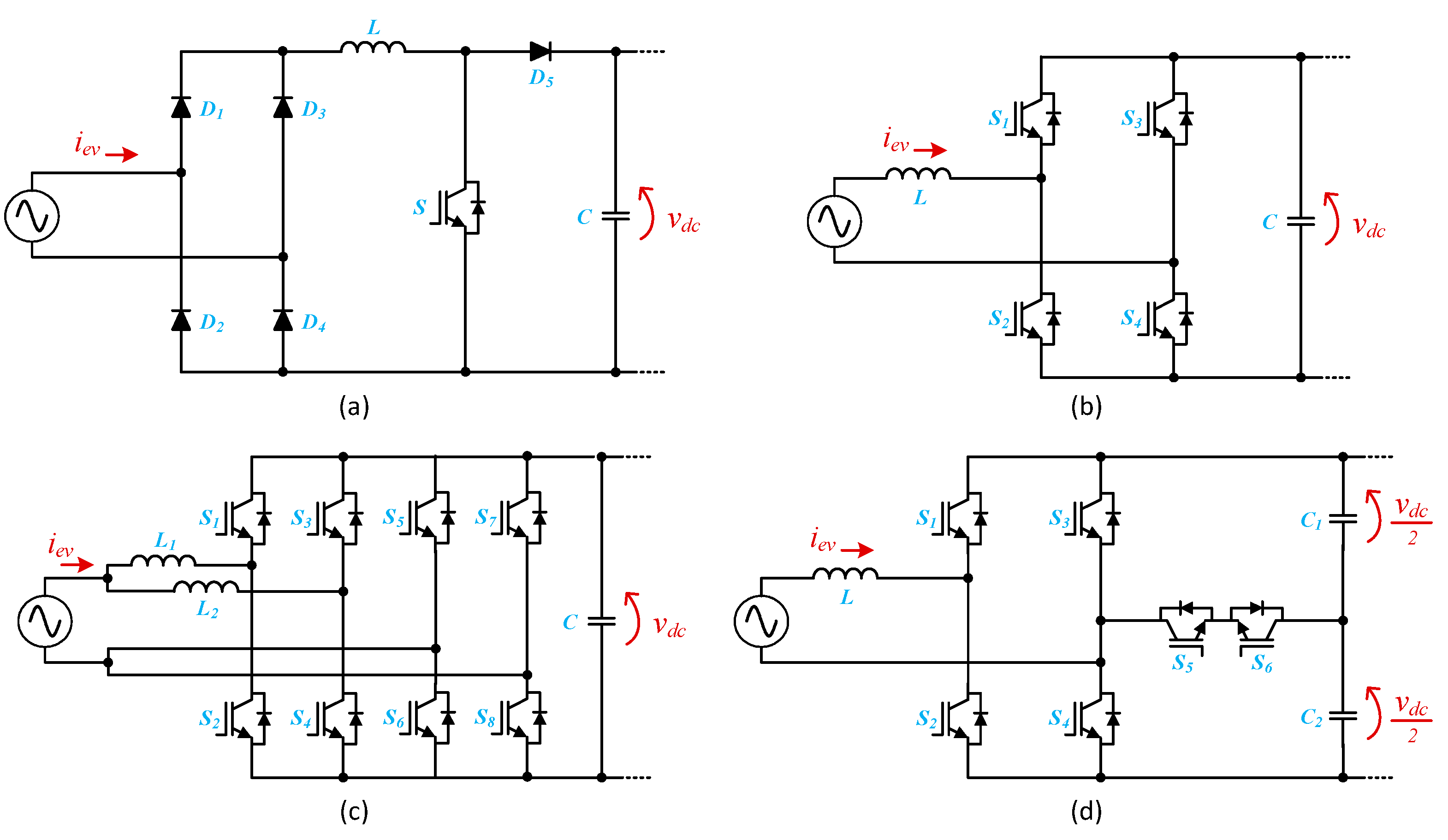{kind=link}
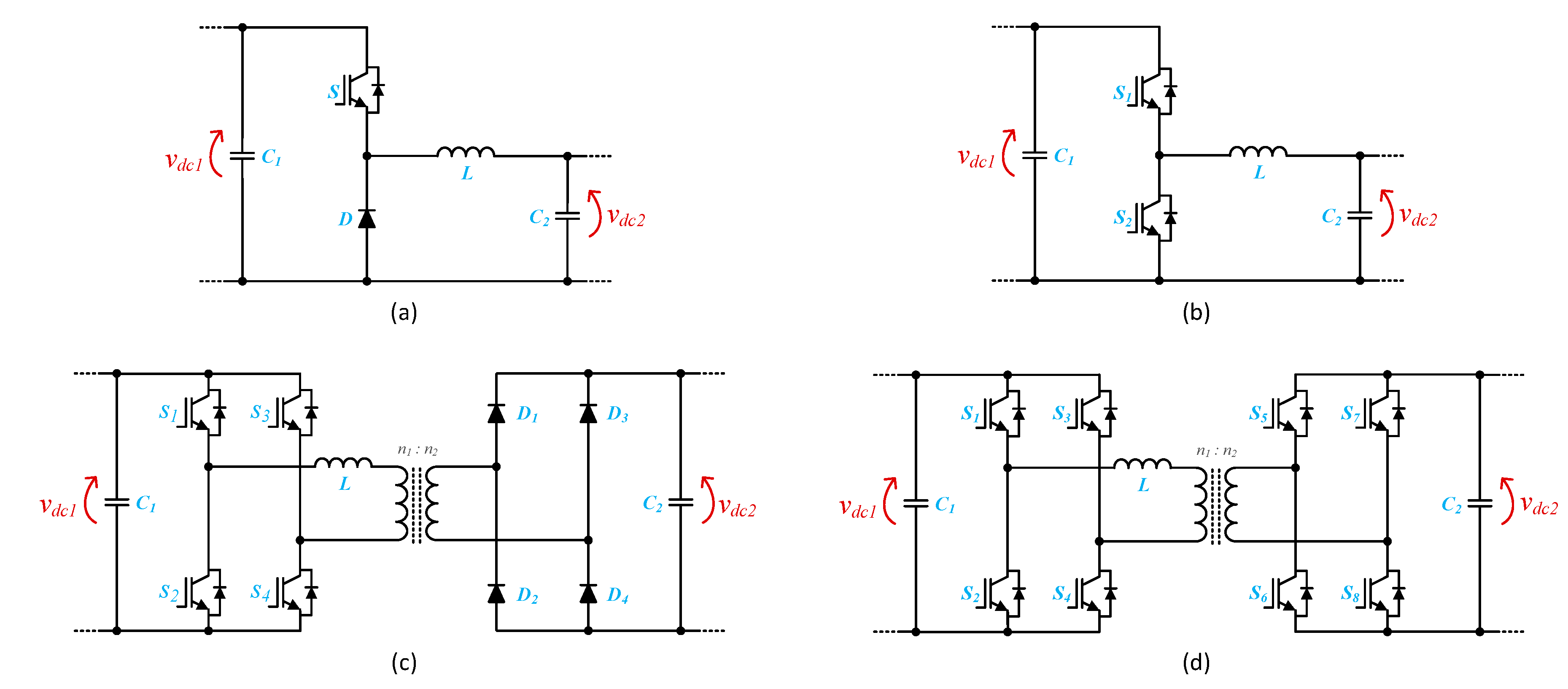{kind=link}
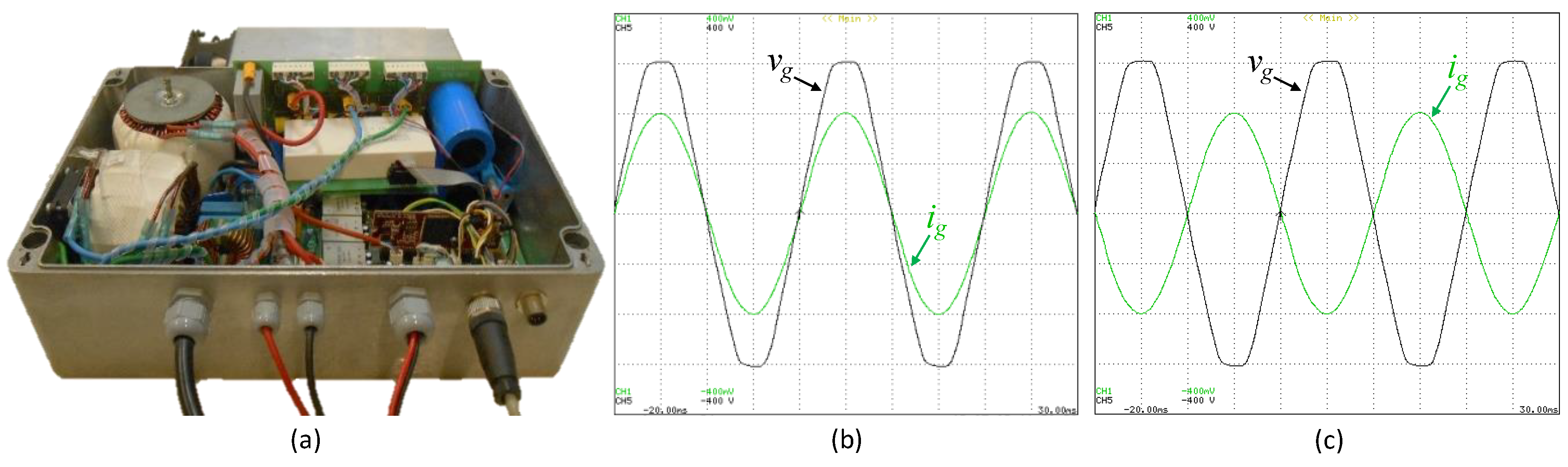{kind=link}
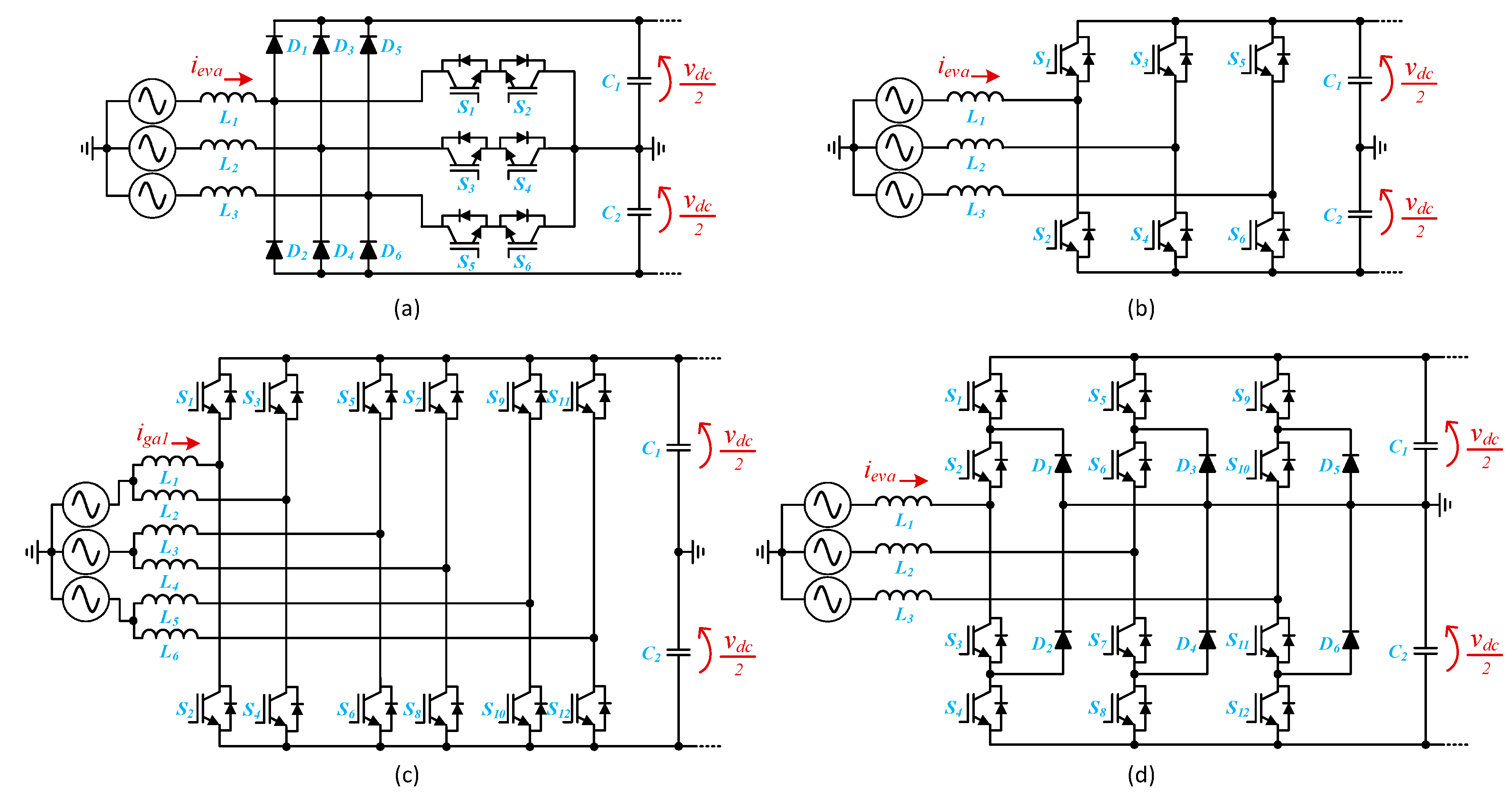{kind=link}
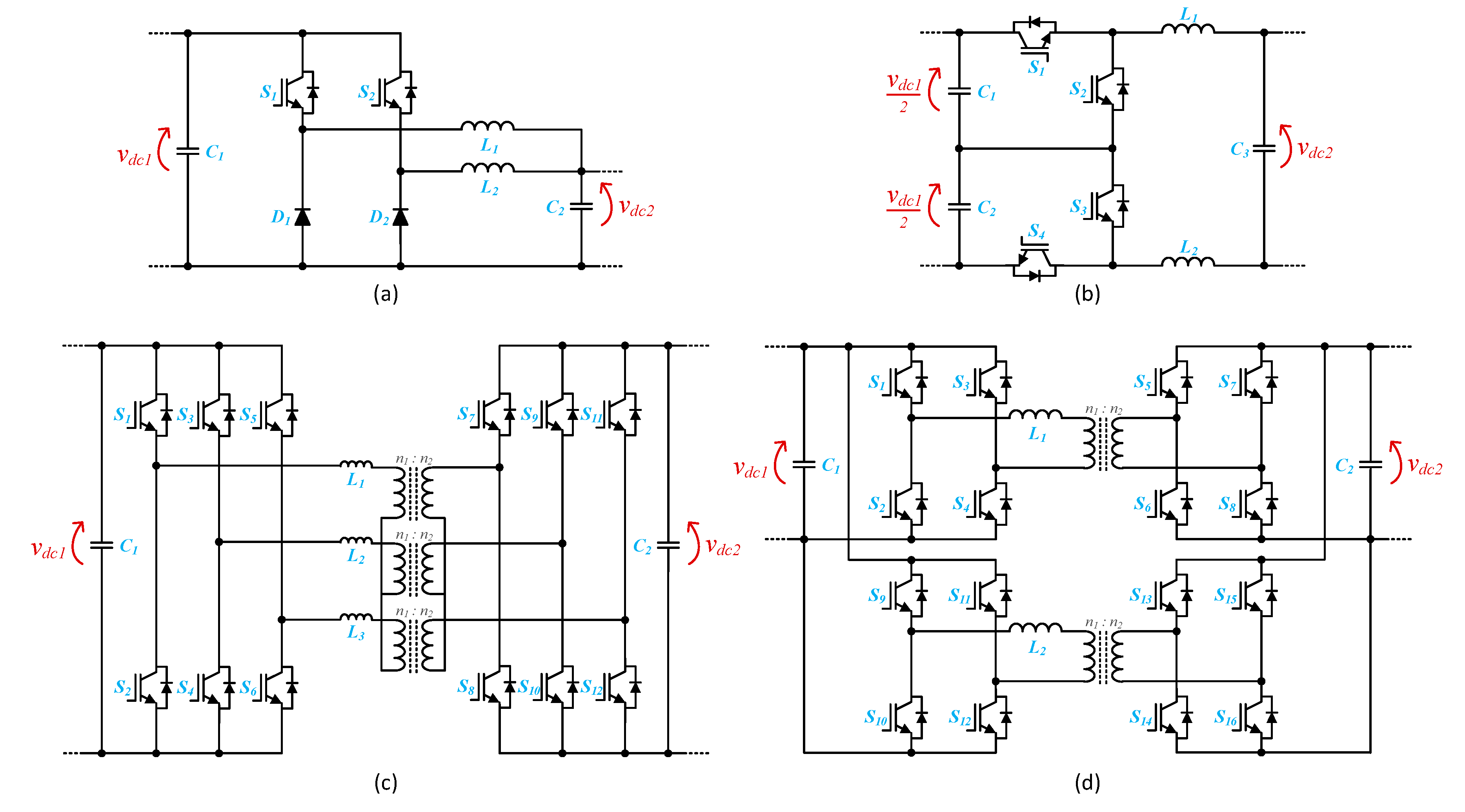{kind=link}
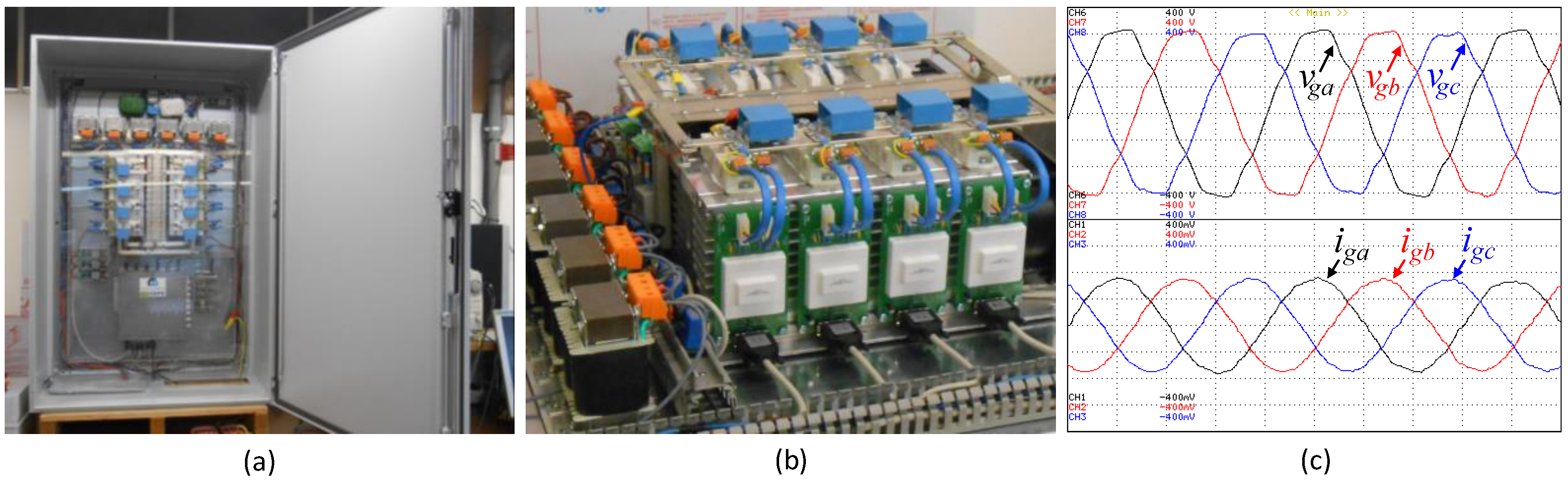{kind=link}
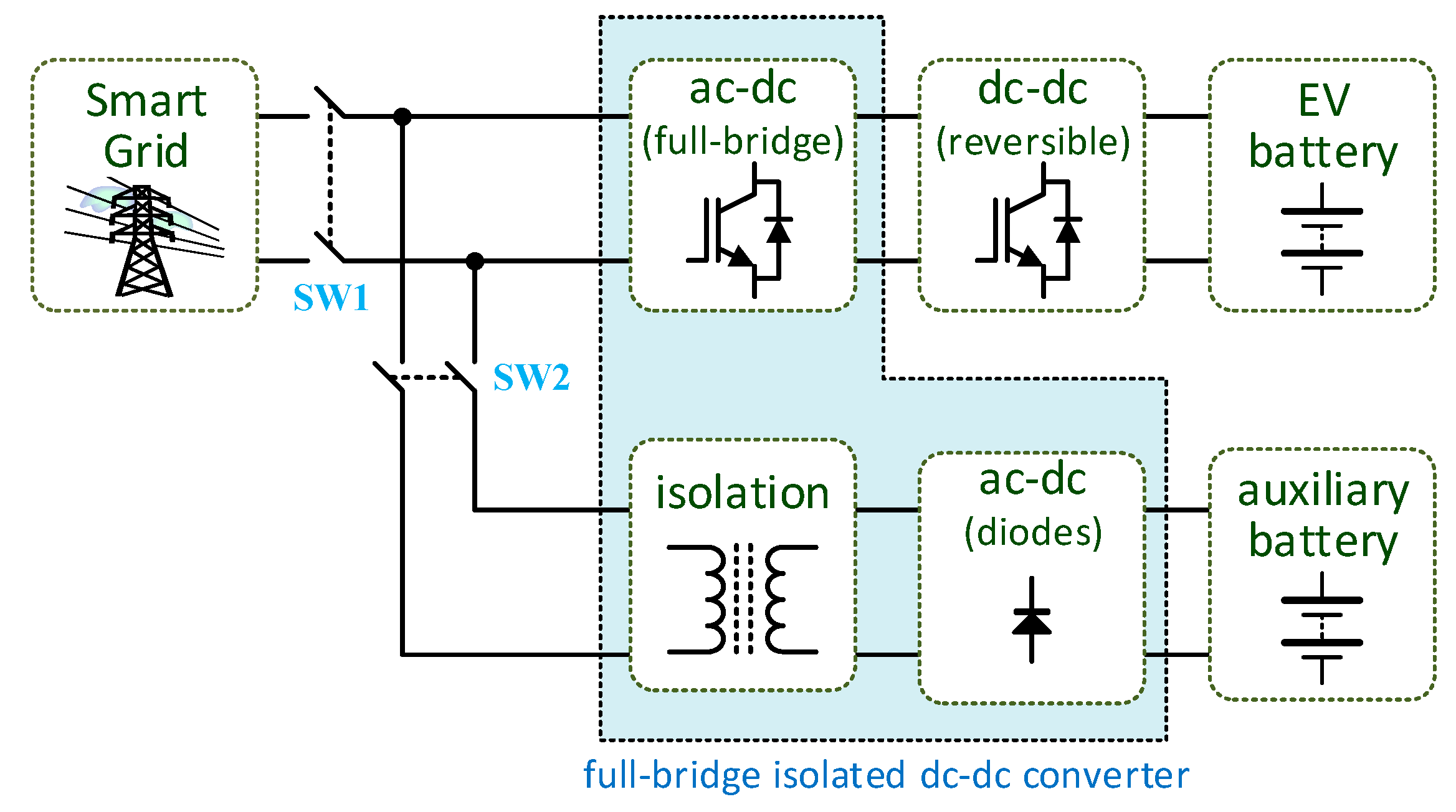{kind=link}
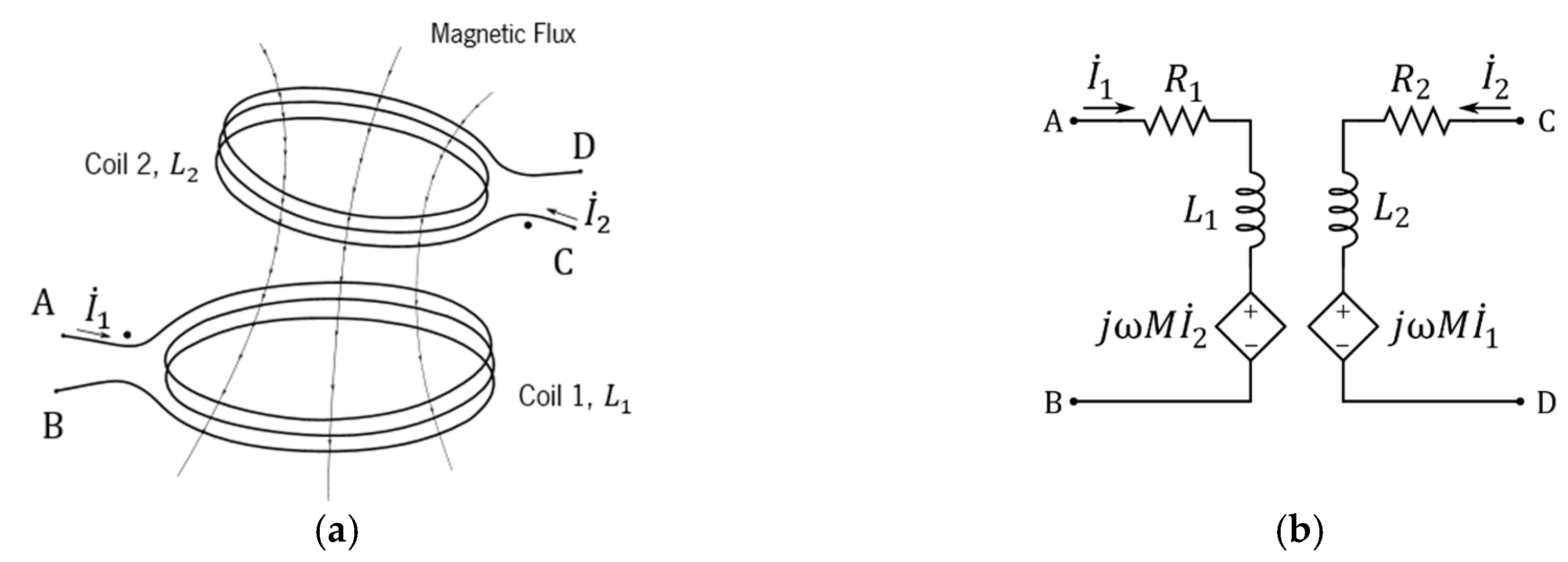{kind=link}
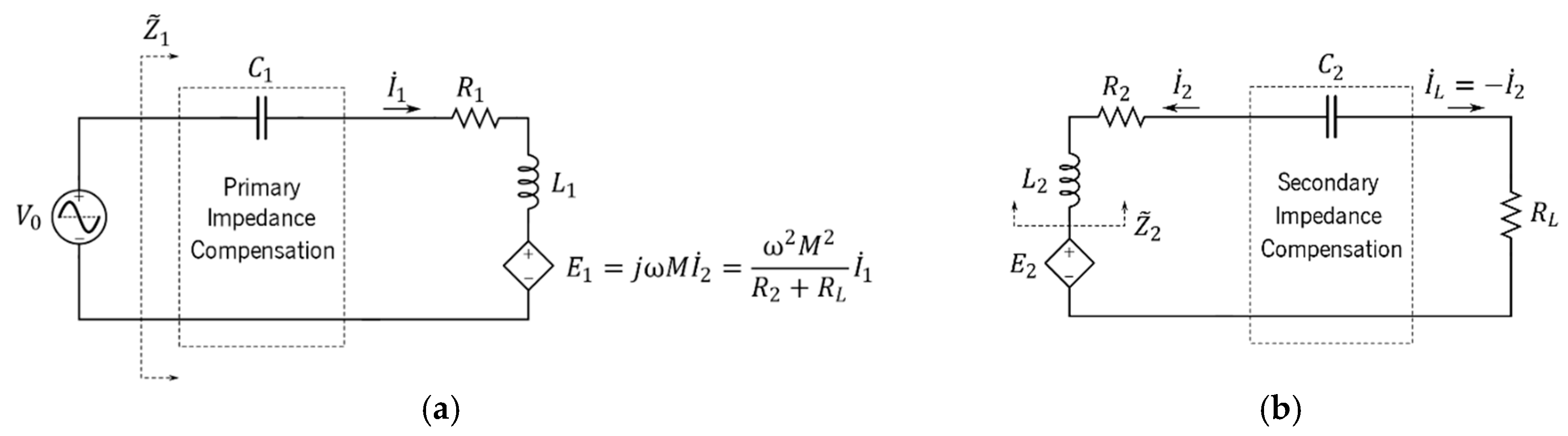{kind=link}
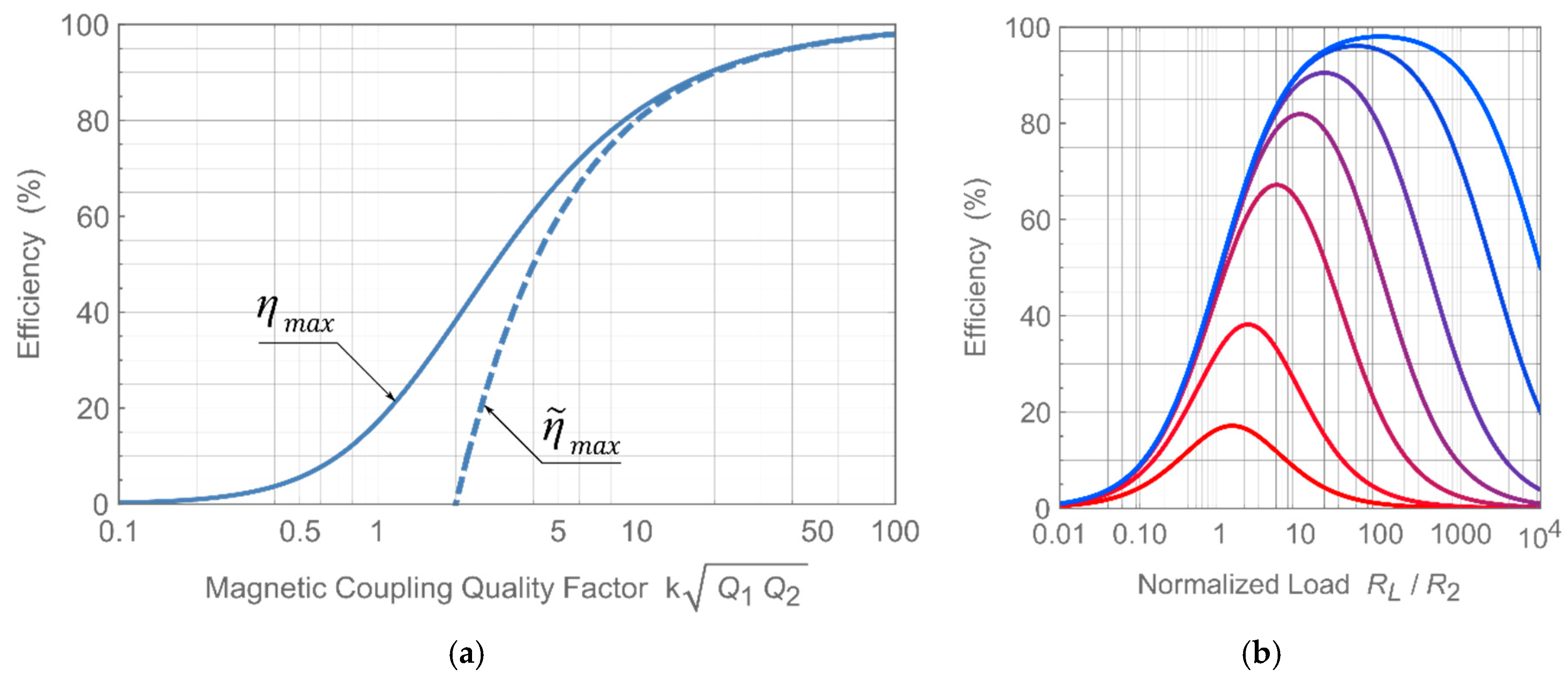{kind=link}
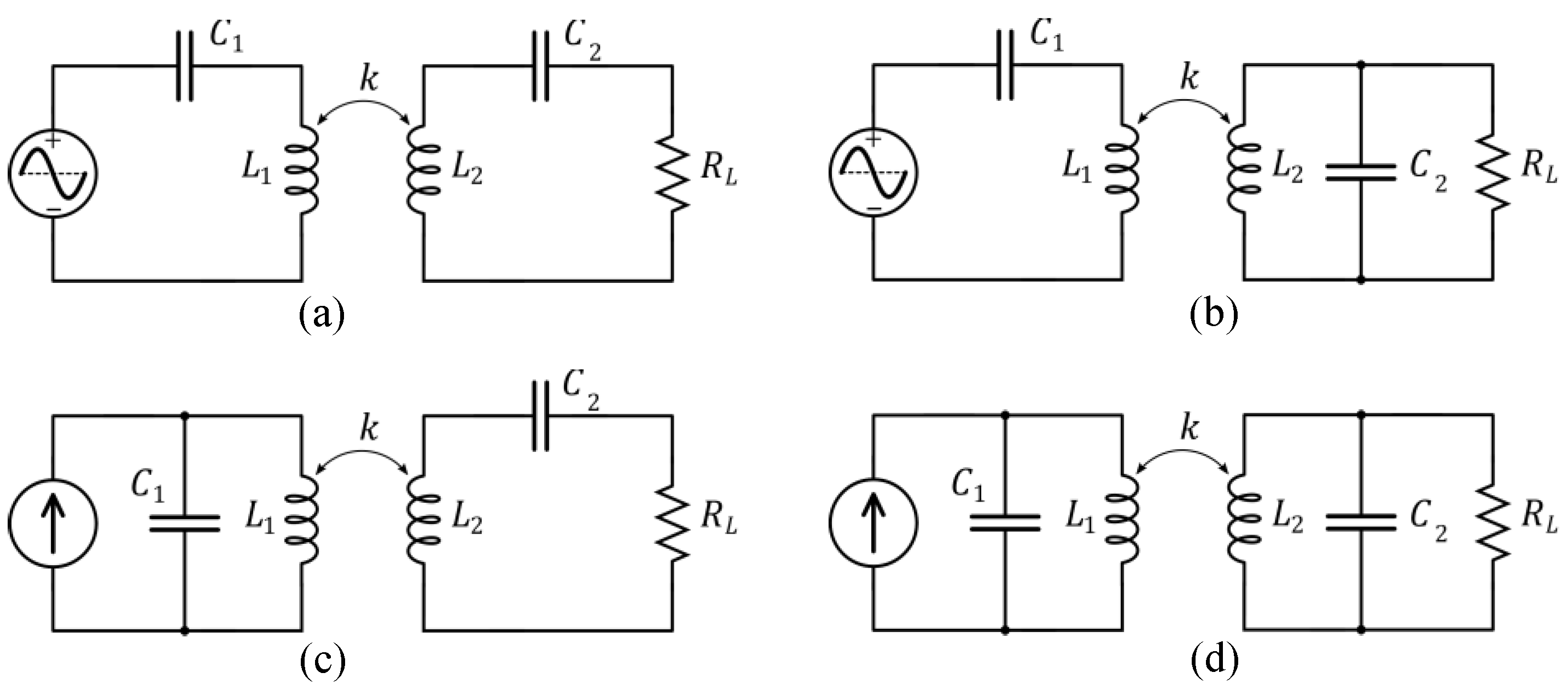{kind=link}
{kind=link}
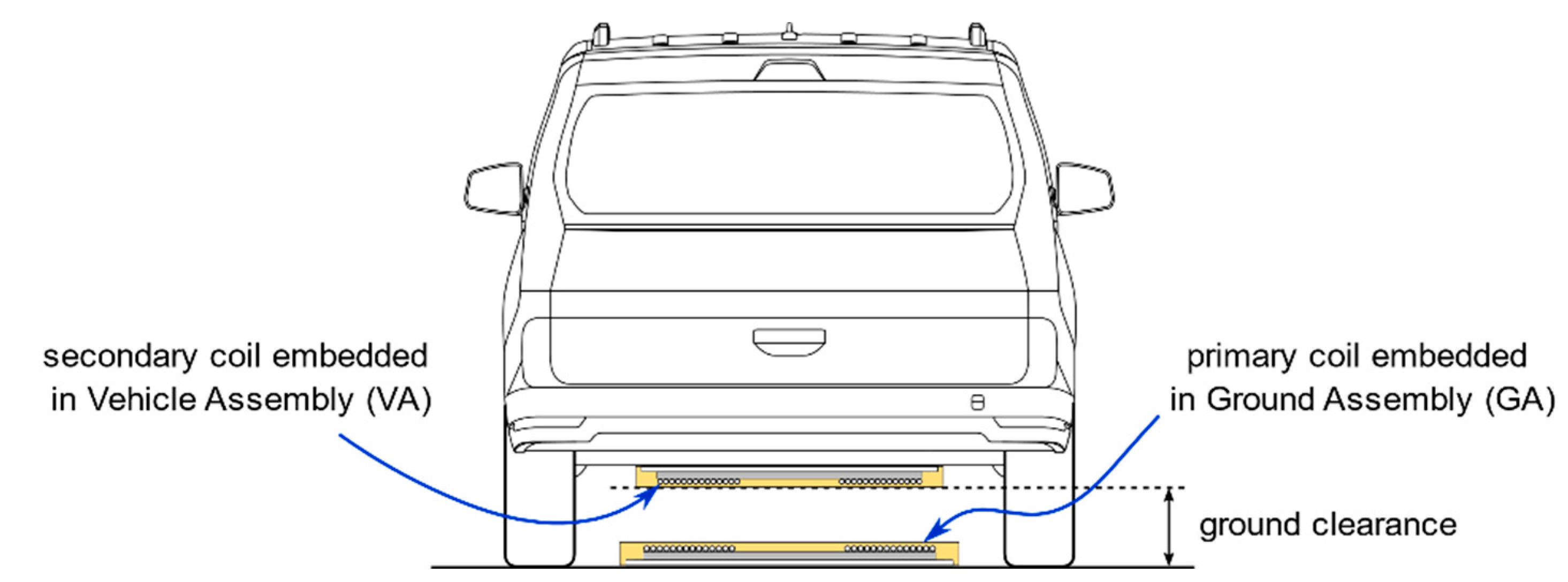{kind=link}
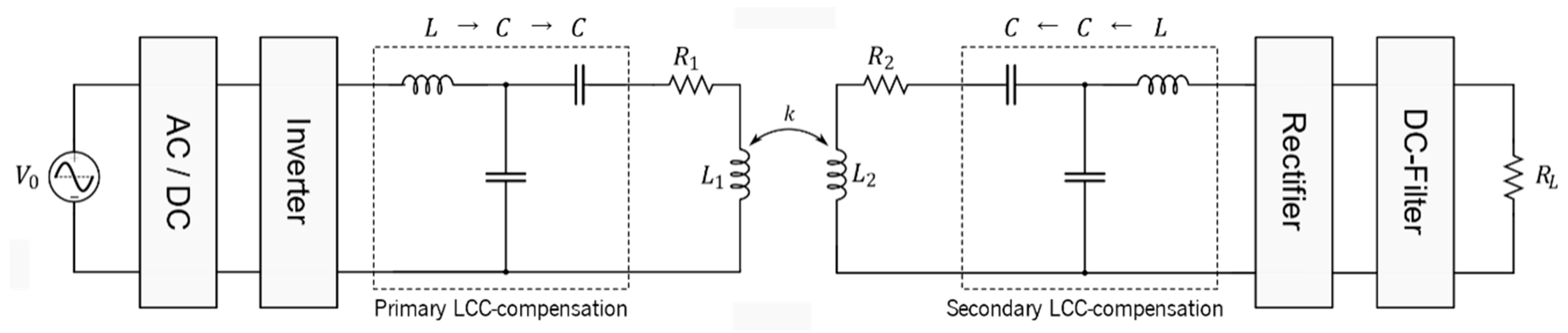{kind=link}
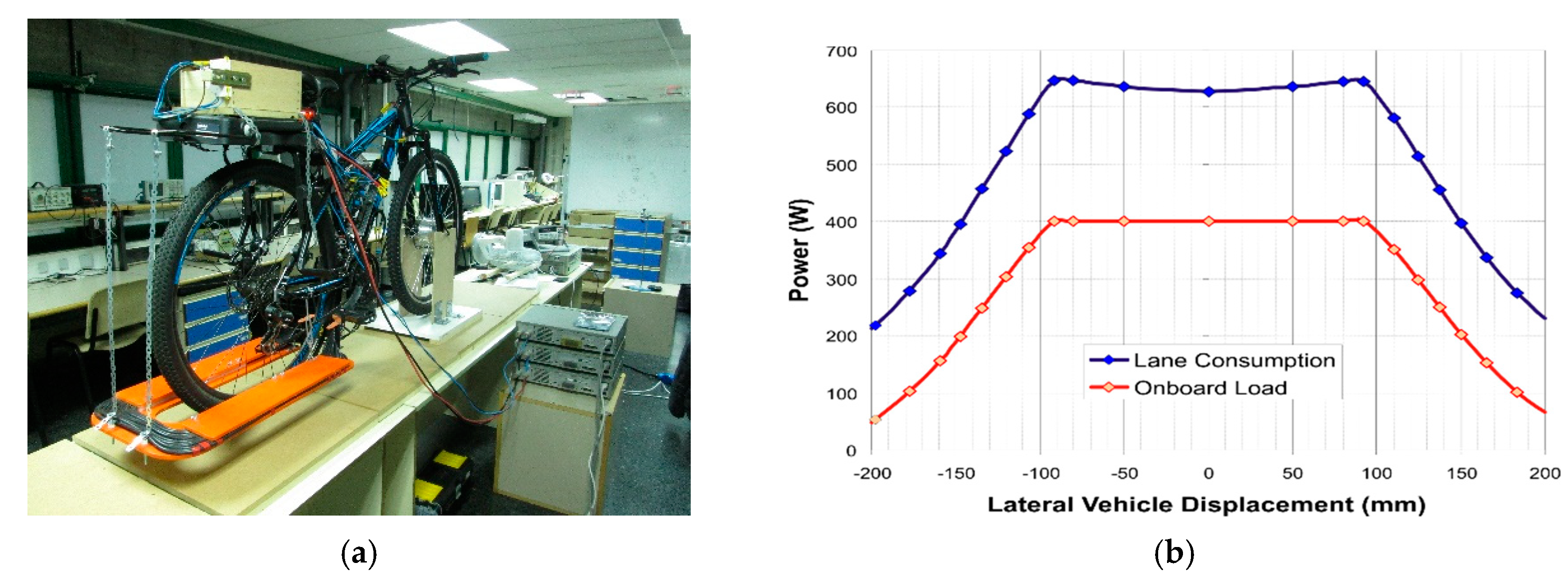{kind=link}
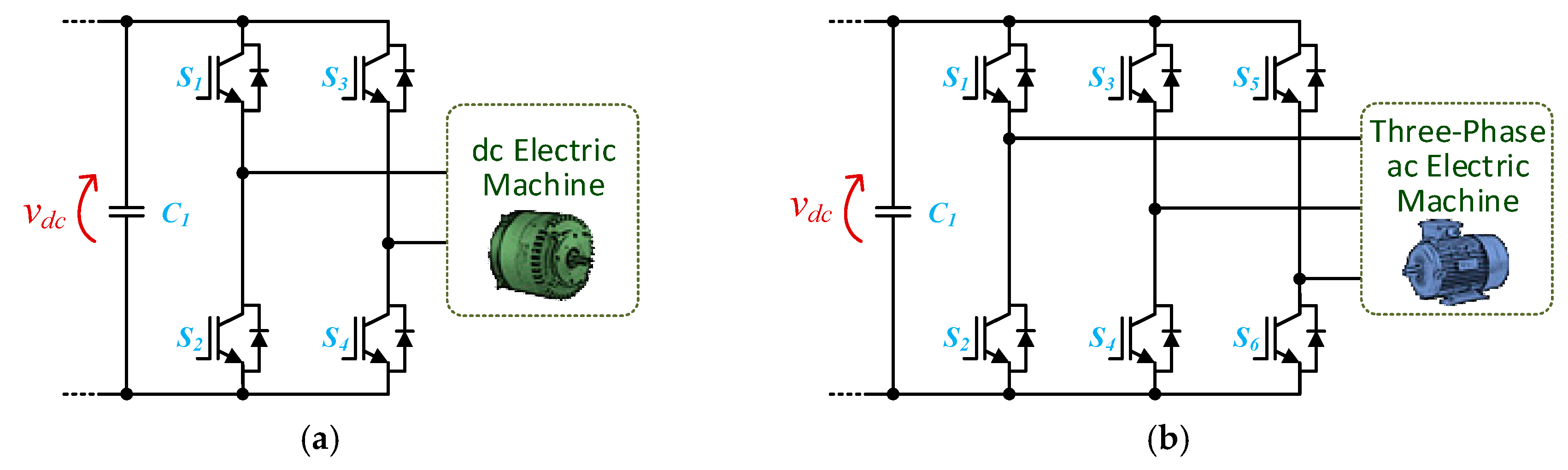{kind=link}
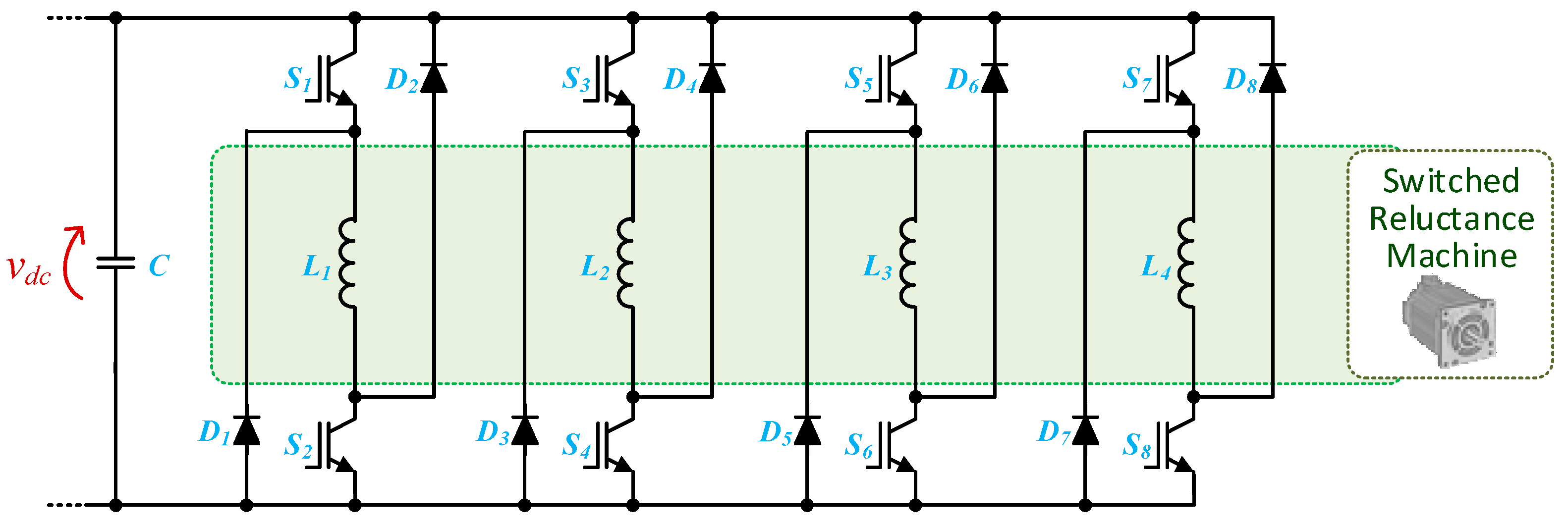{kind=link}
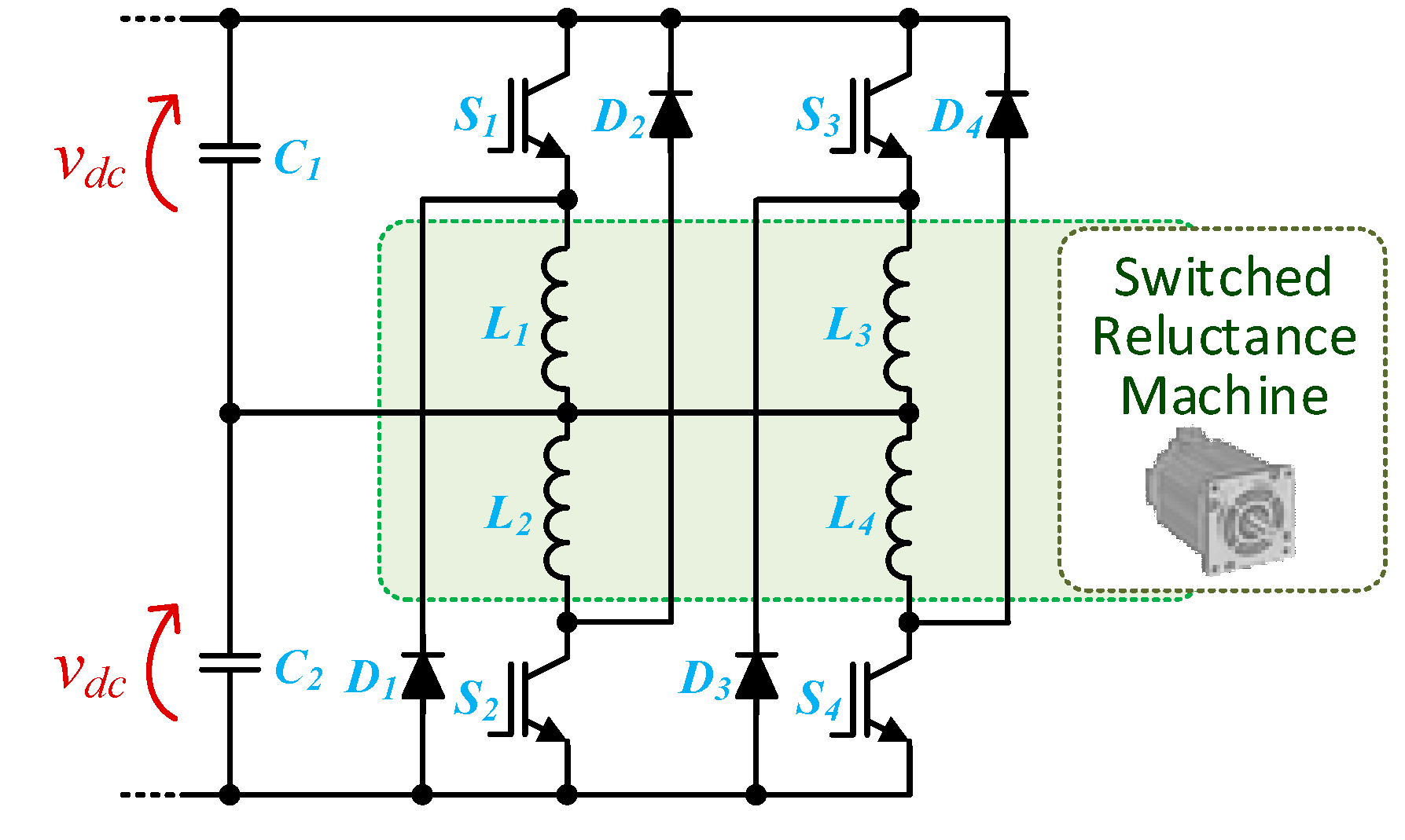{kind=link}
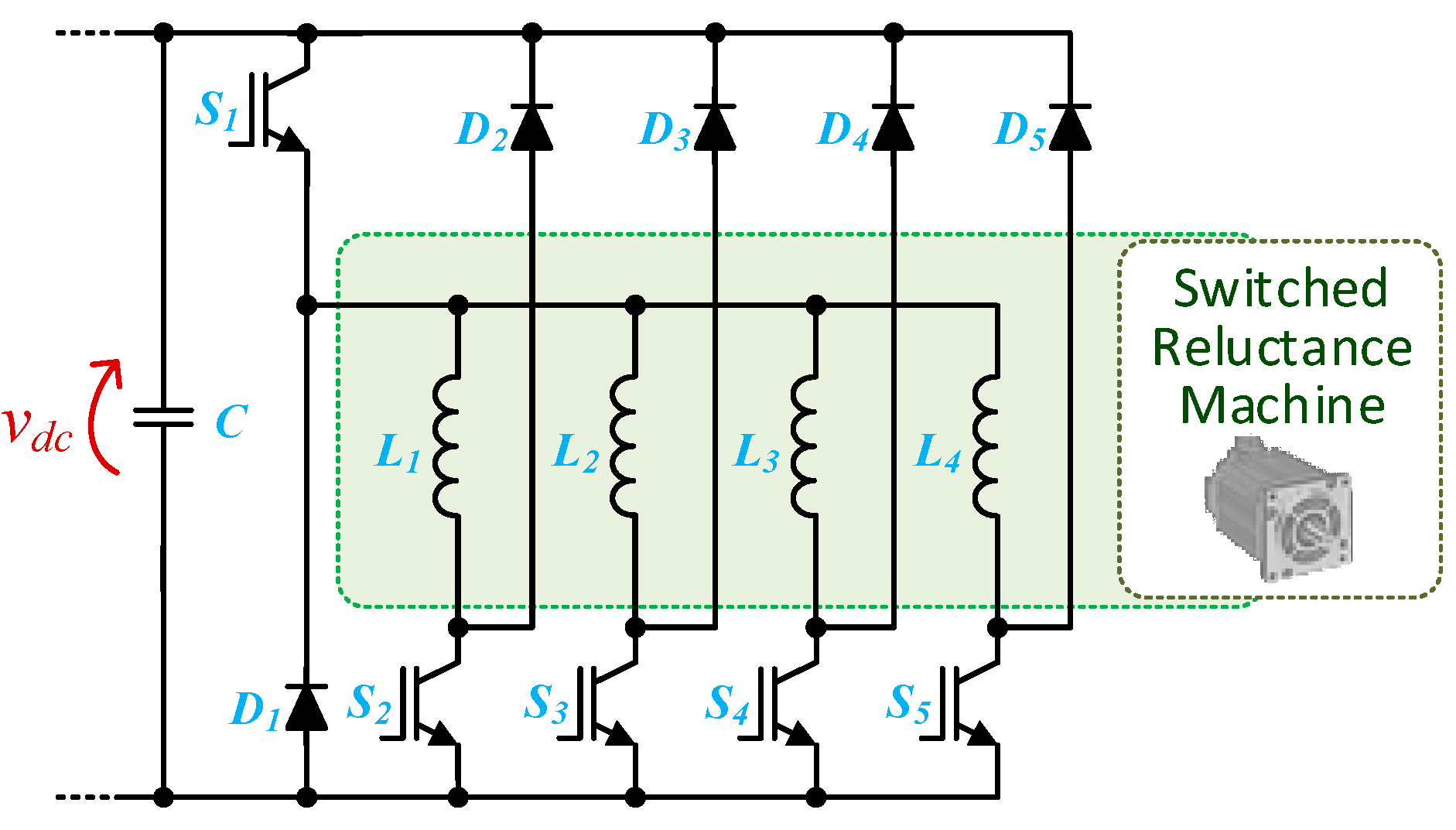{kind=link}
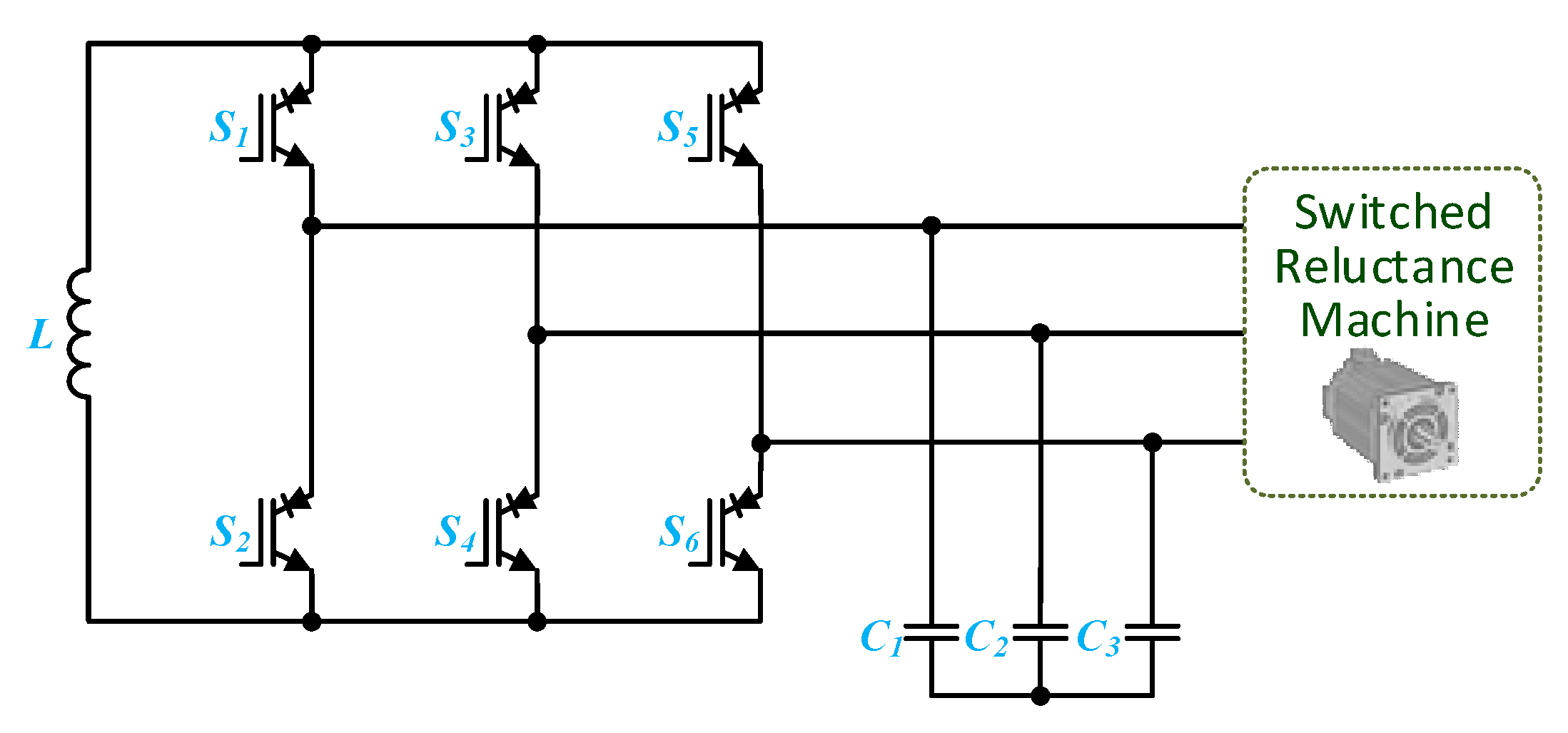{kind=link}
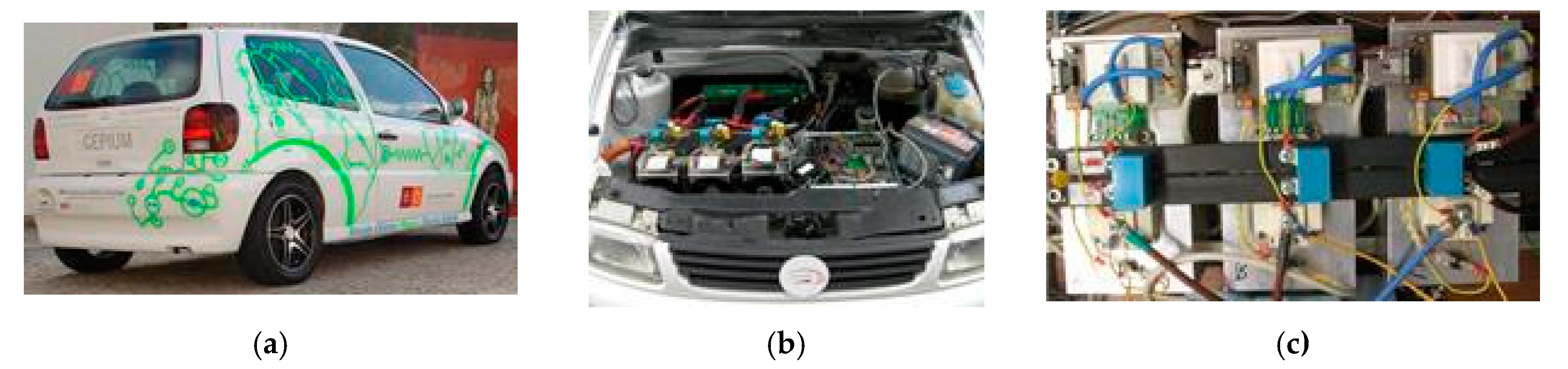{kind=link}
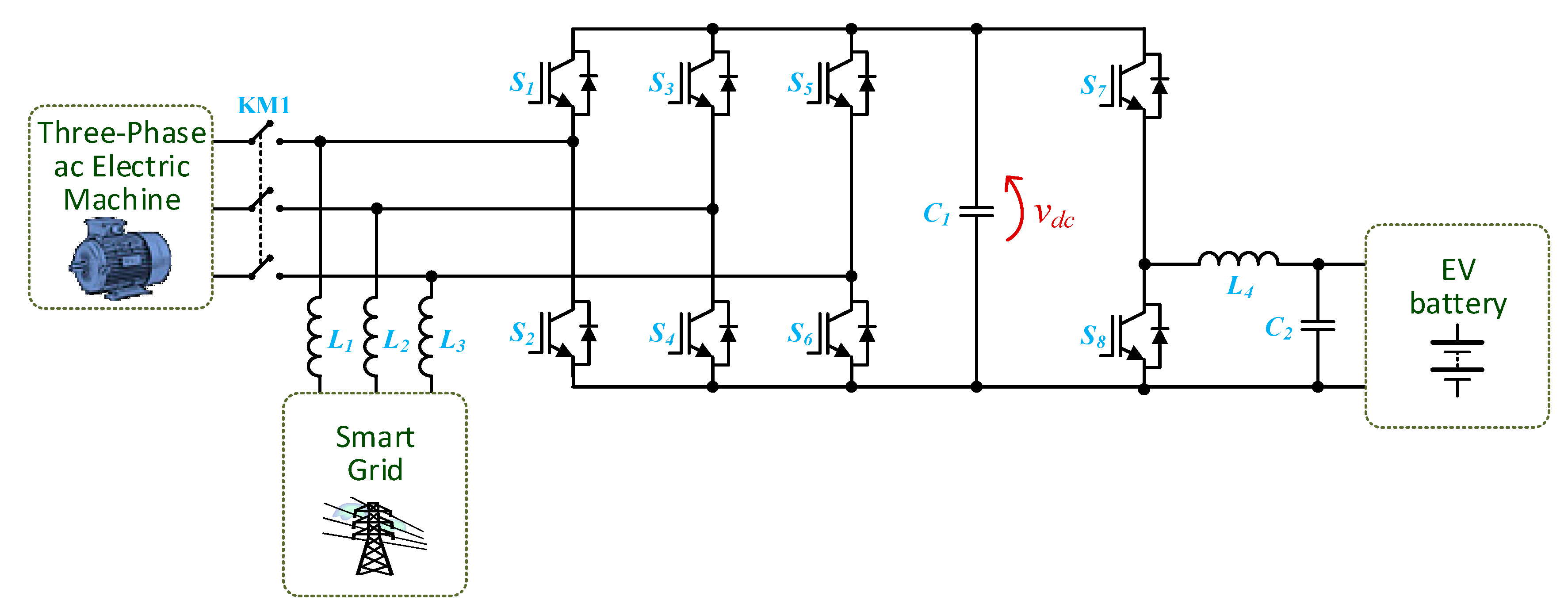{kind=link}
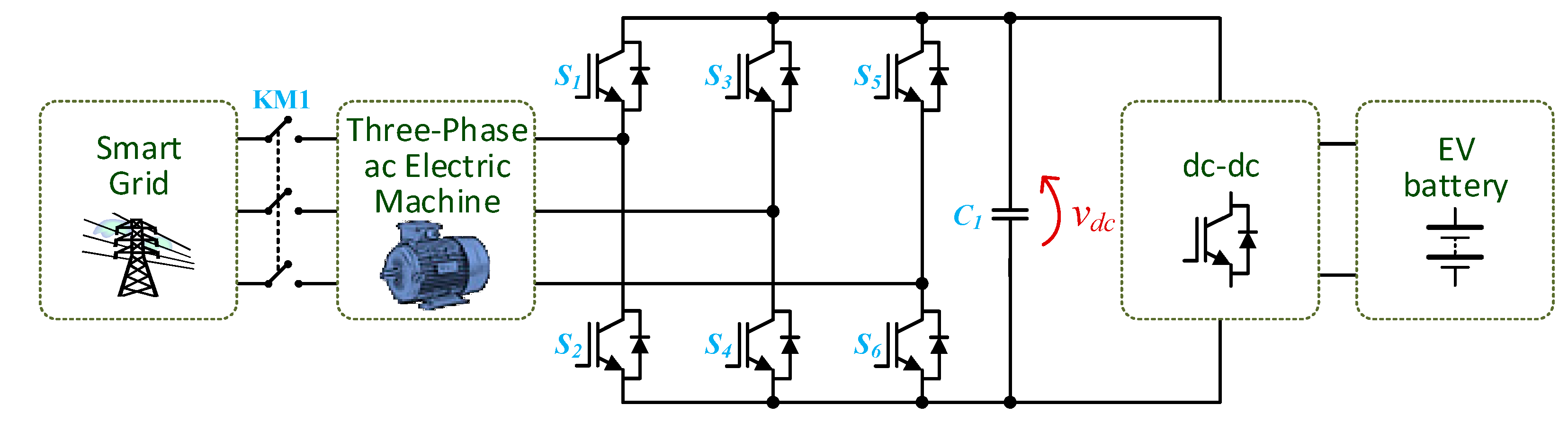{kind=link}
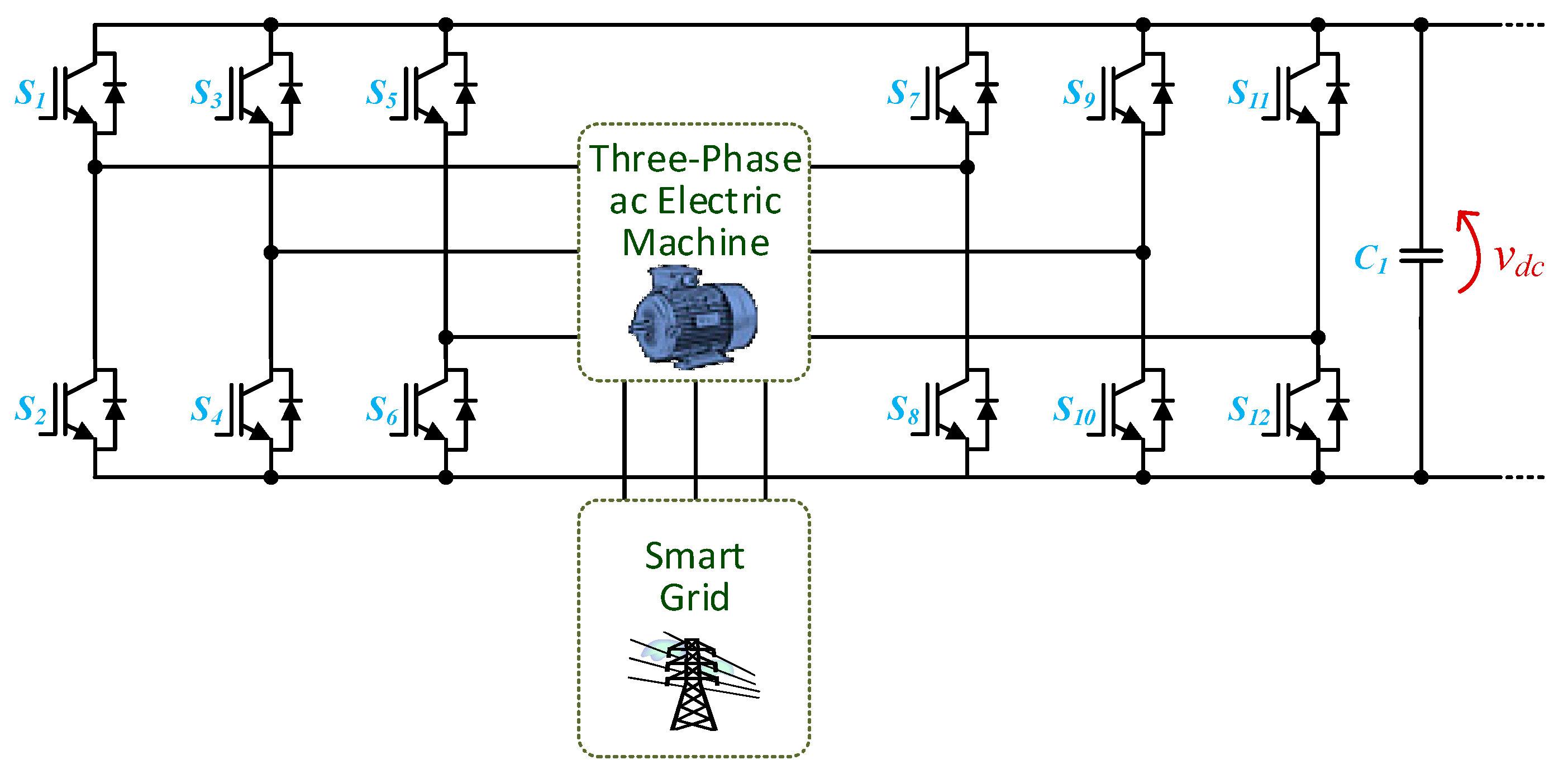{kind=link}
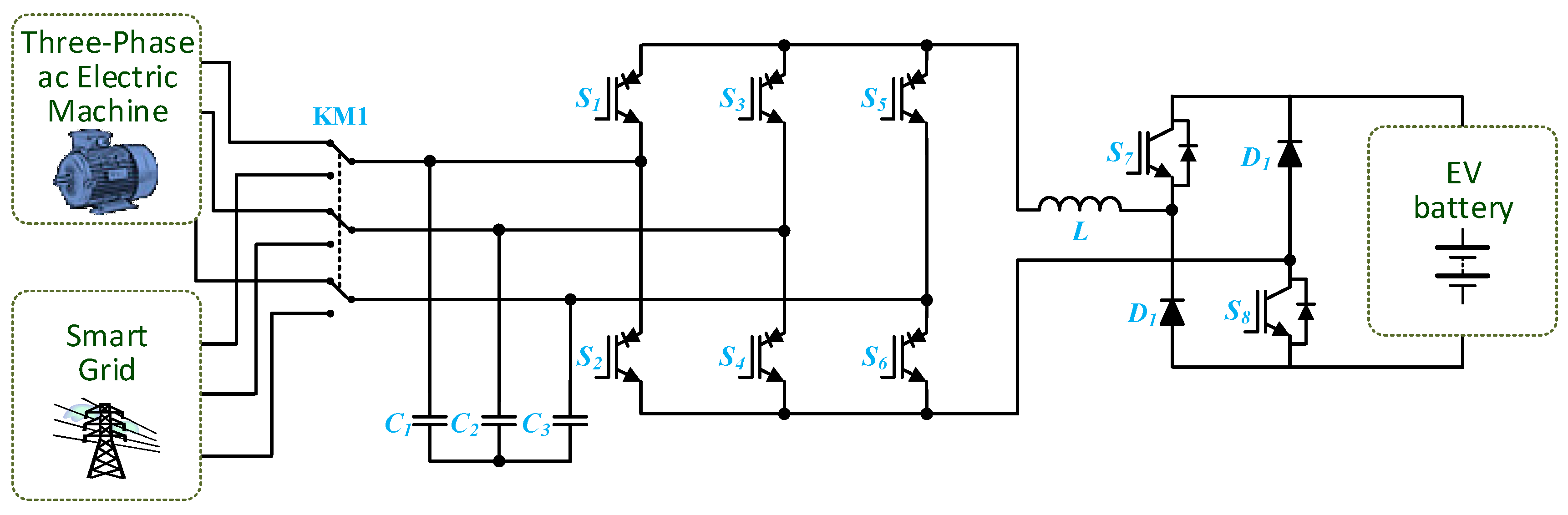{kind=link}
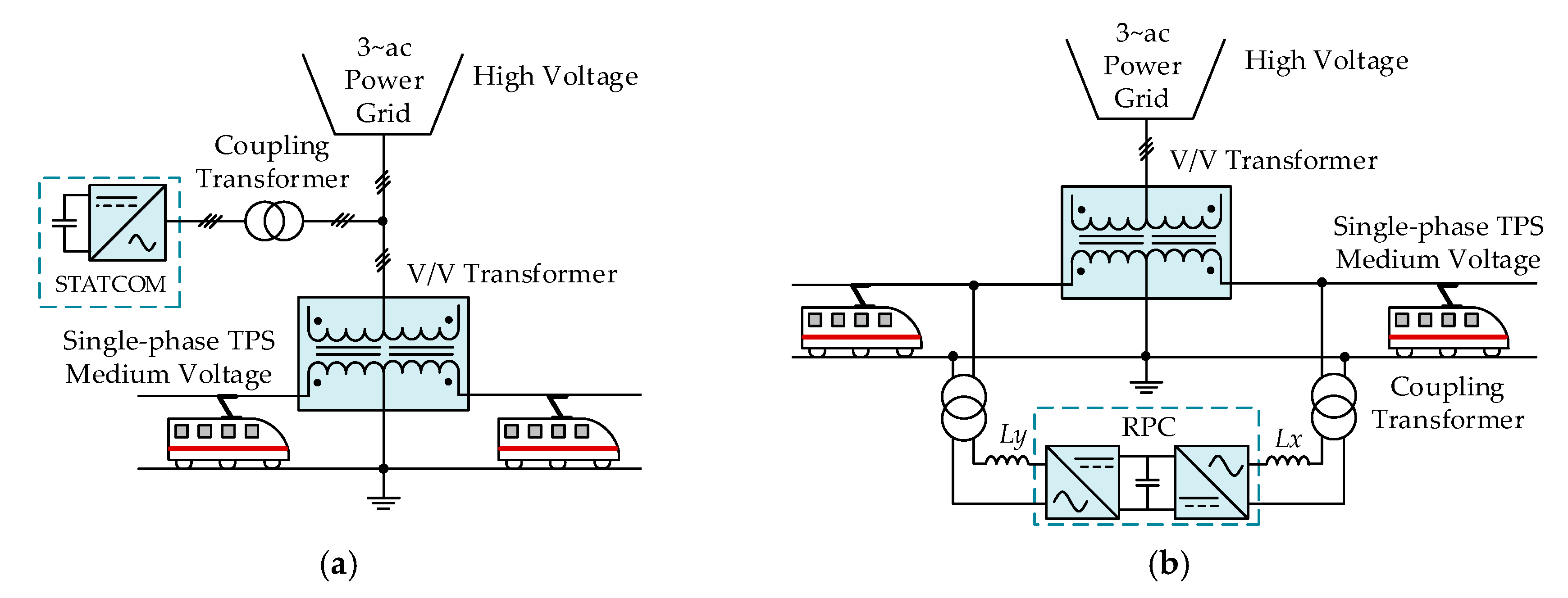{kind=link}
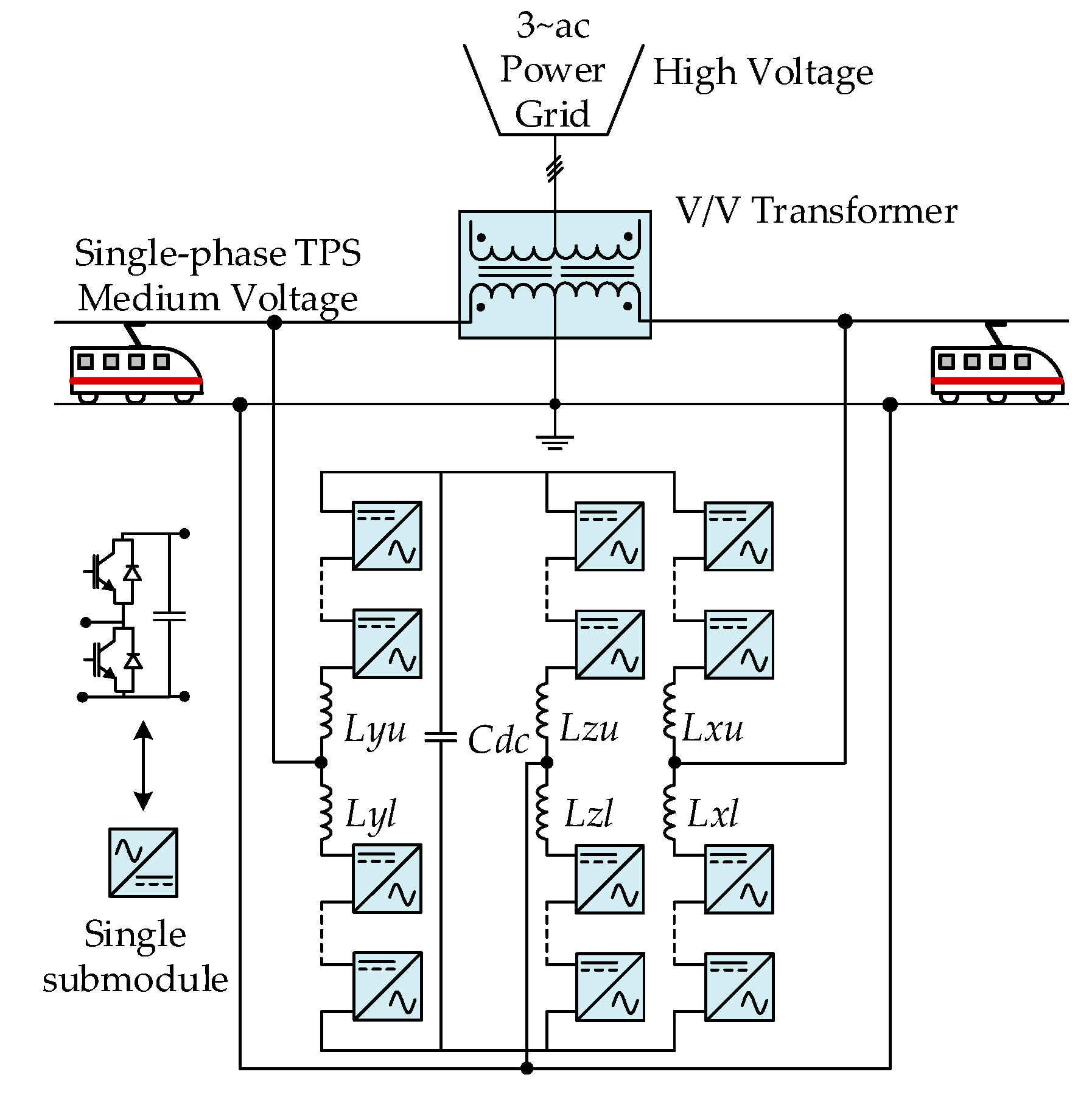{kind=link}
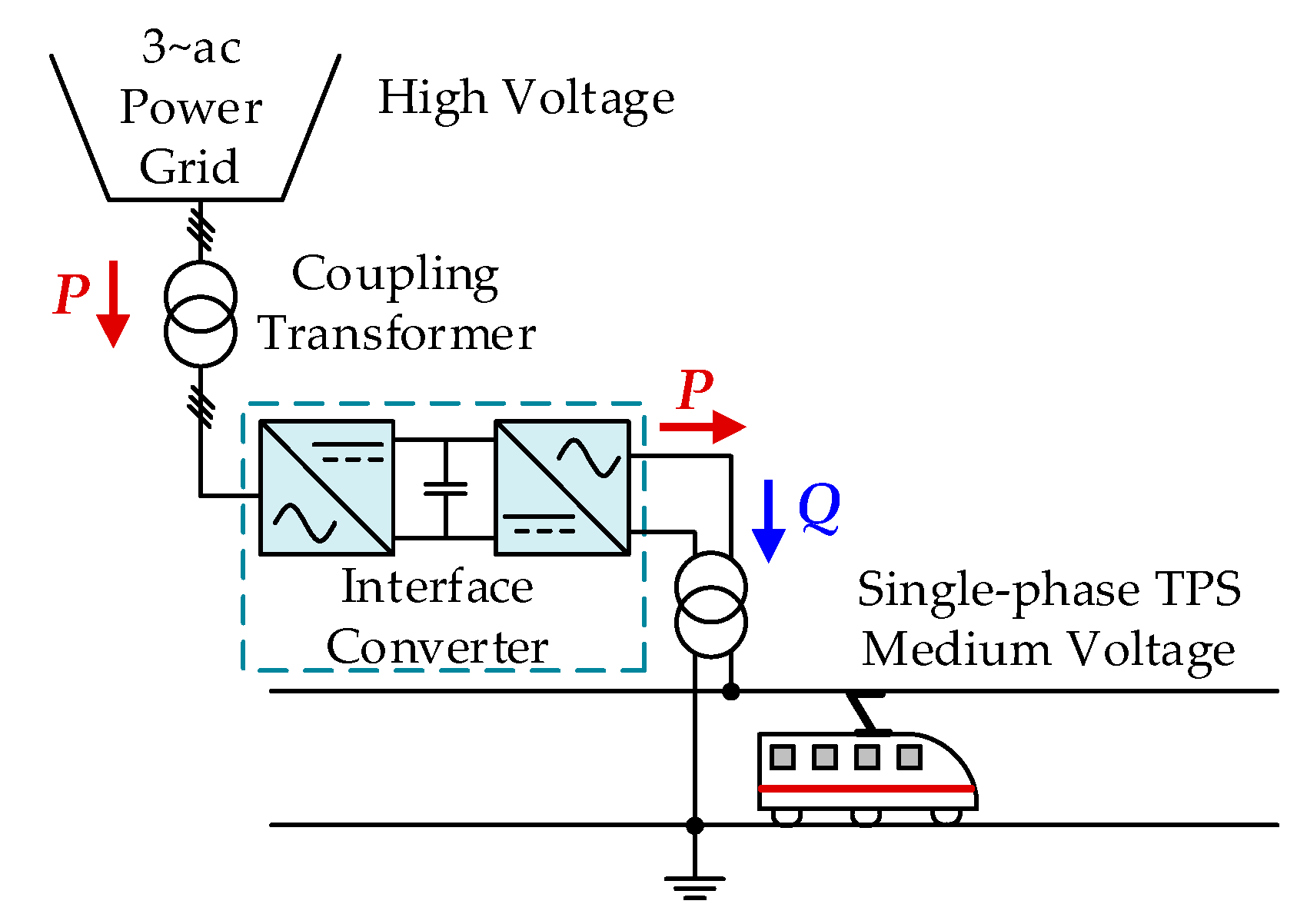{kind=link}
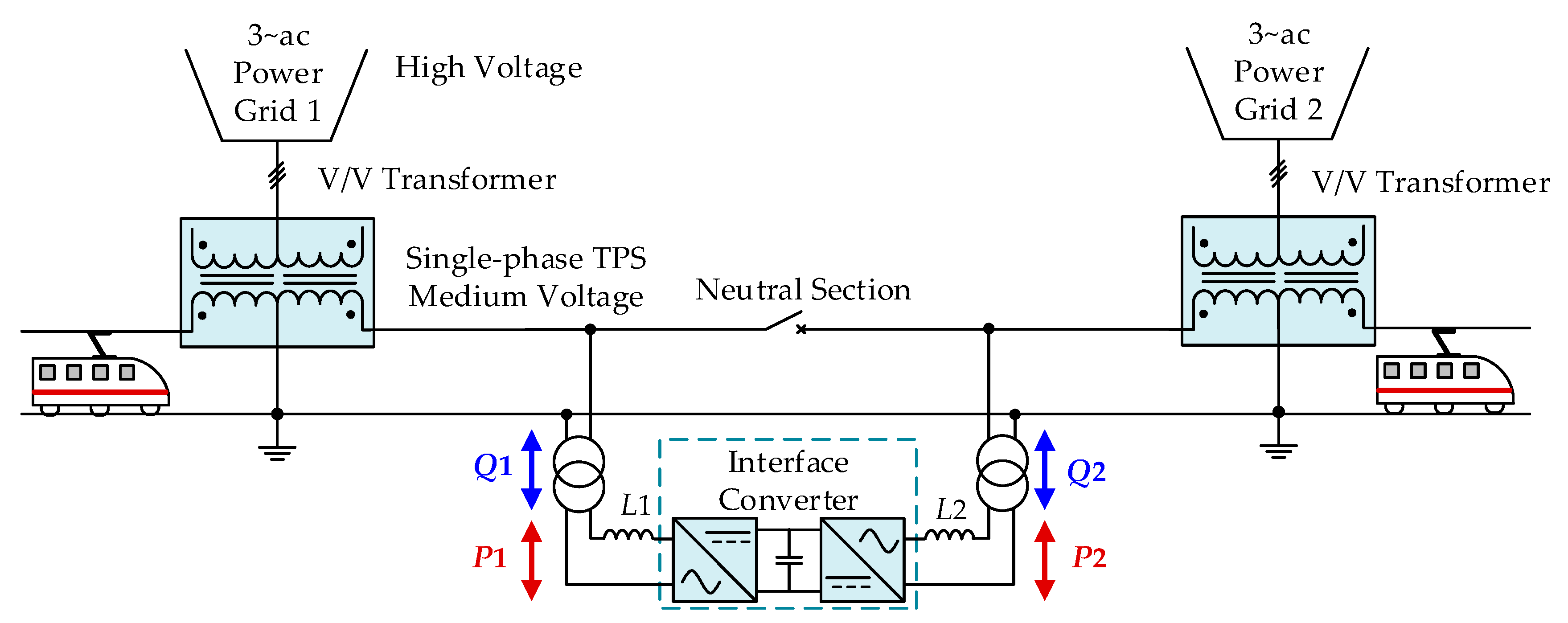{kind=link}
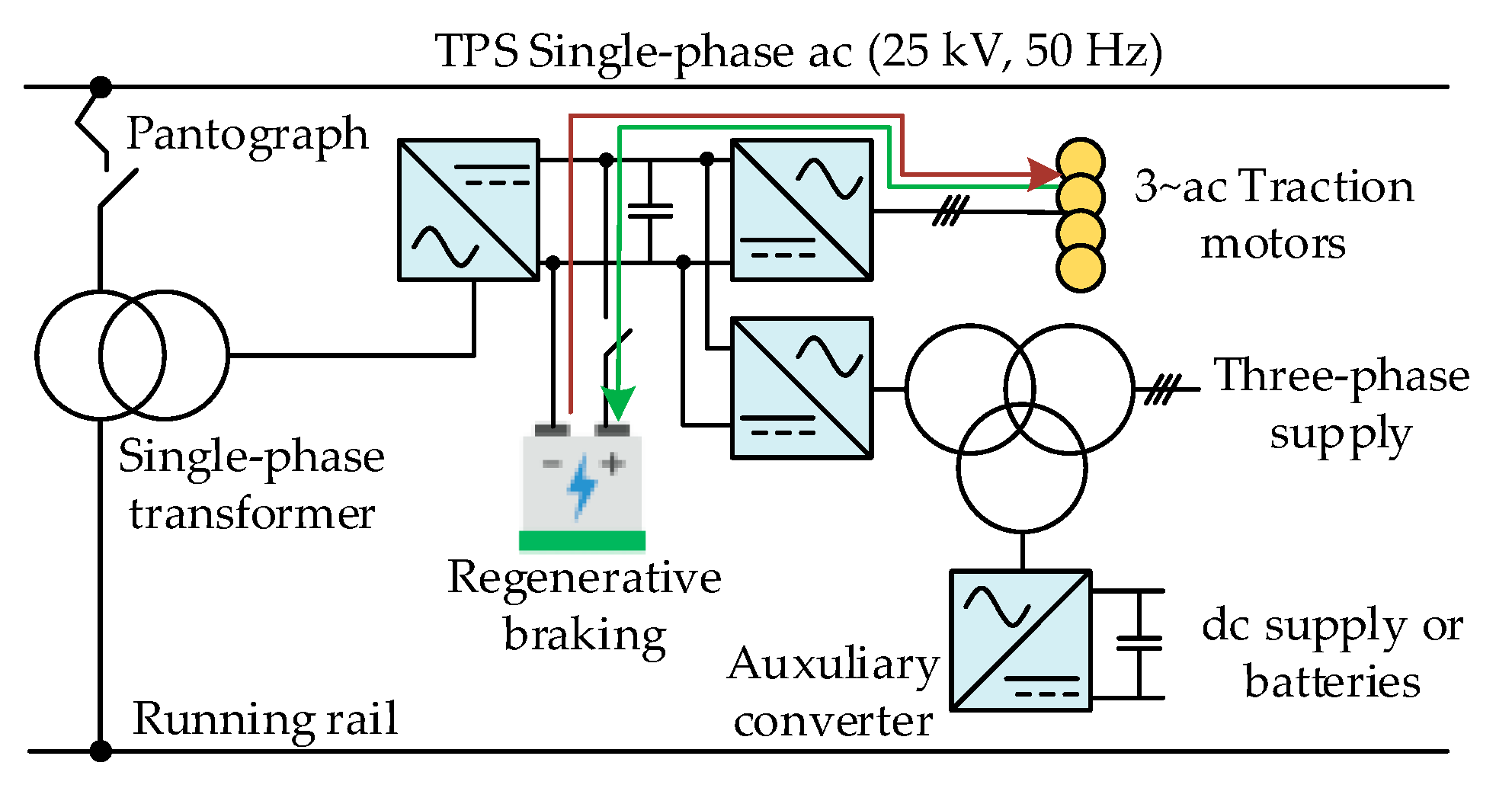{kind=link}
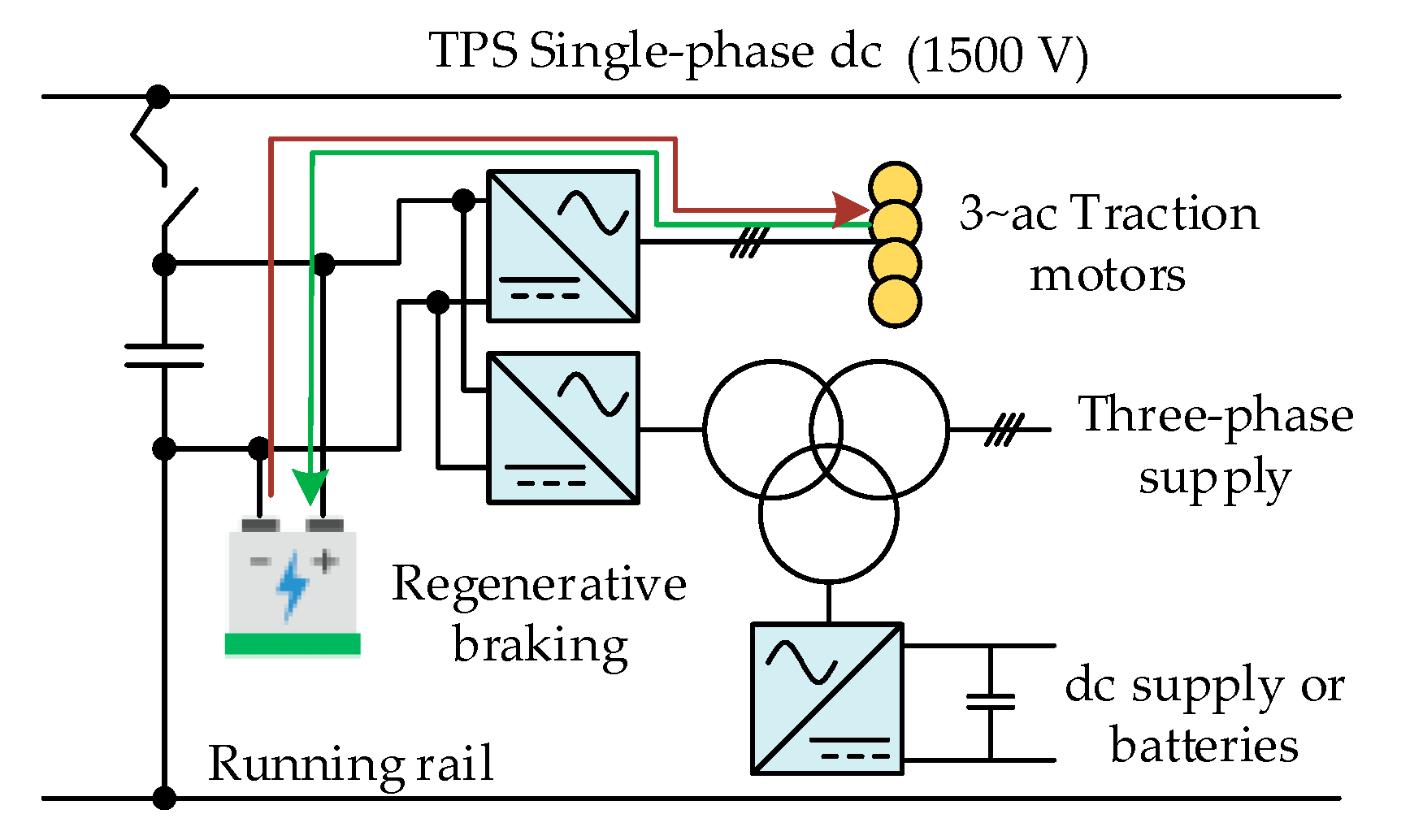{kind=link}
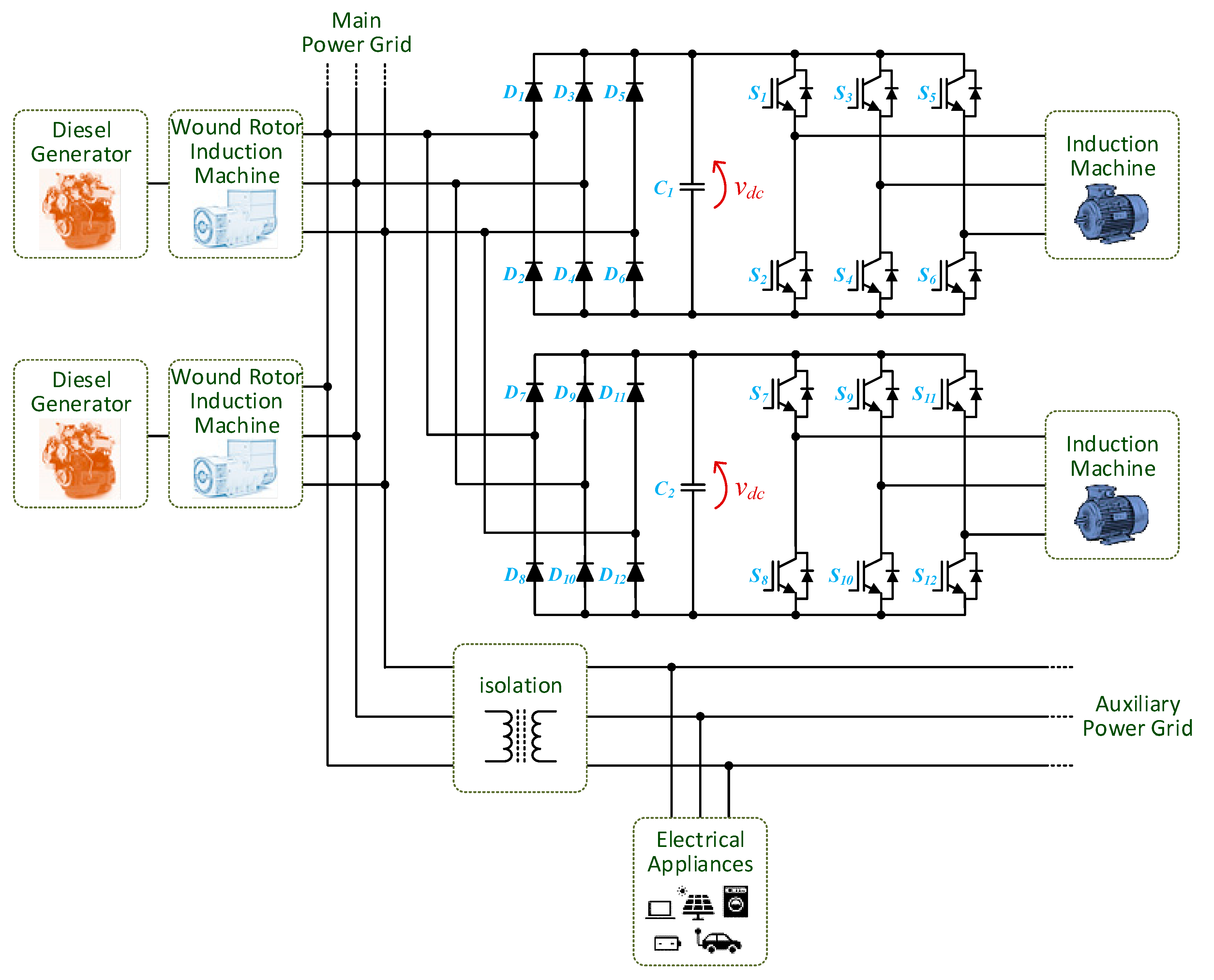{kind=link}
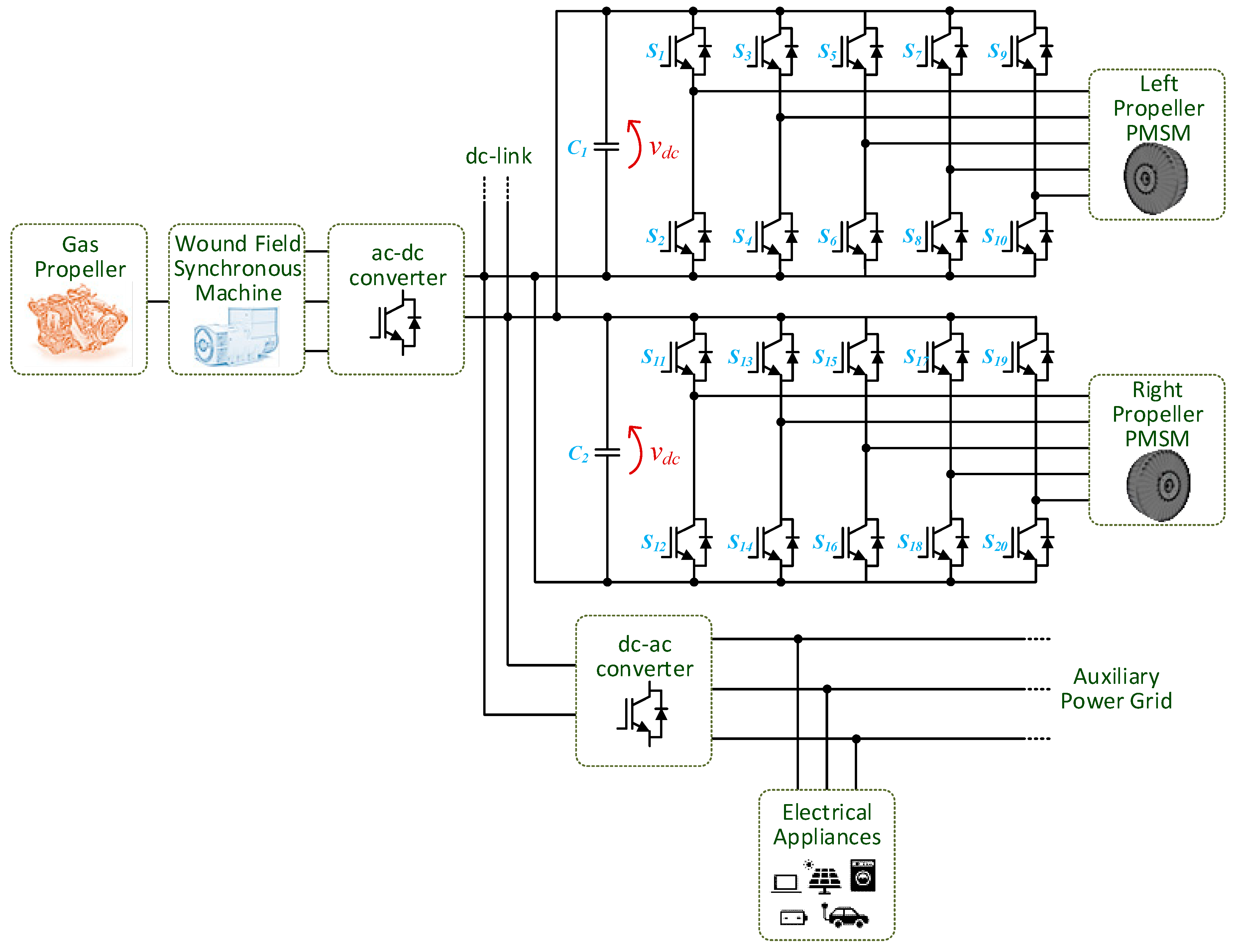{kind=link}
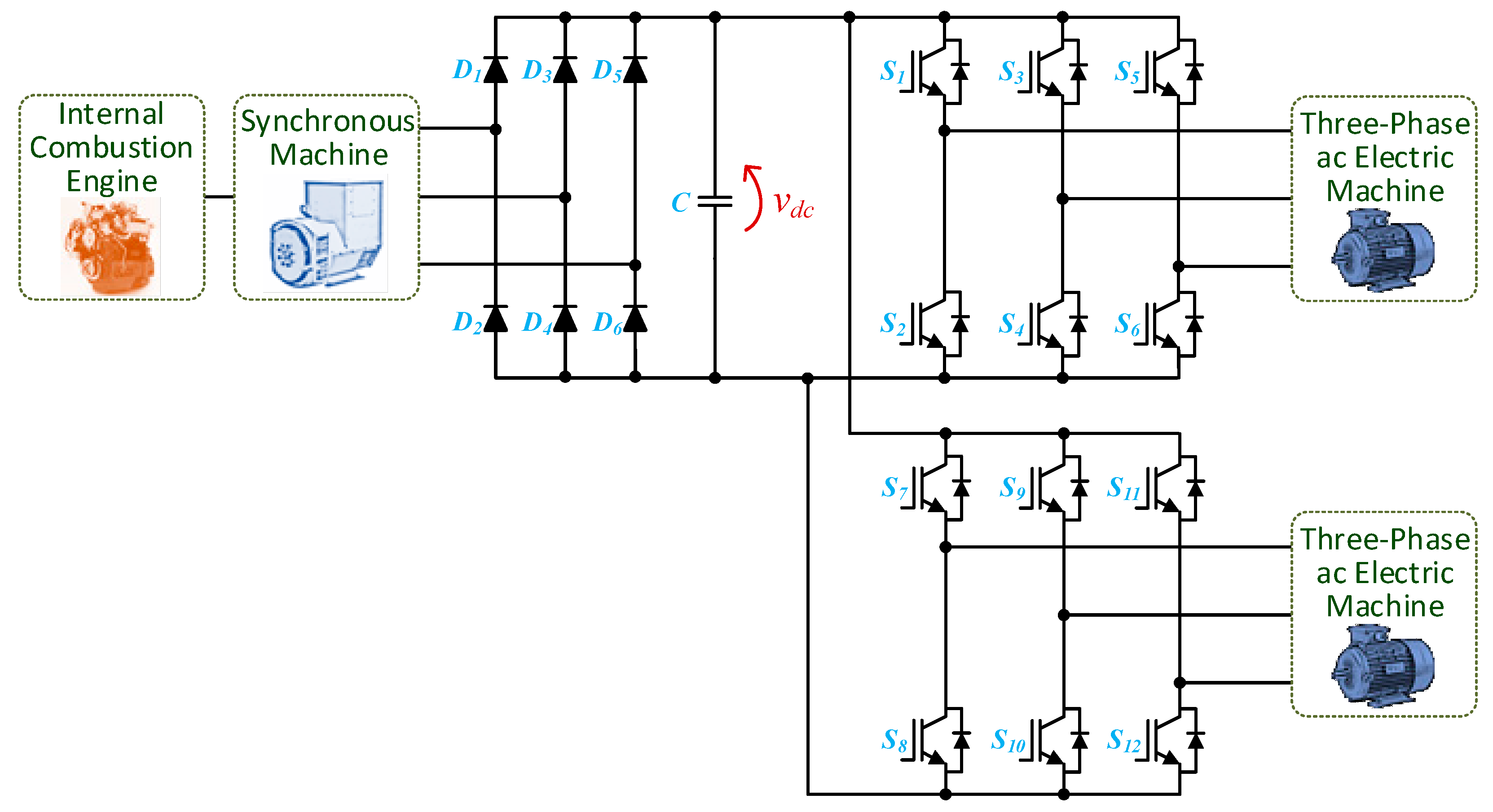{kind=link}
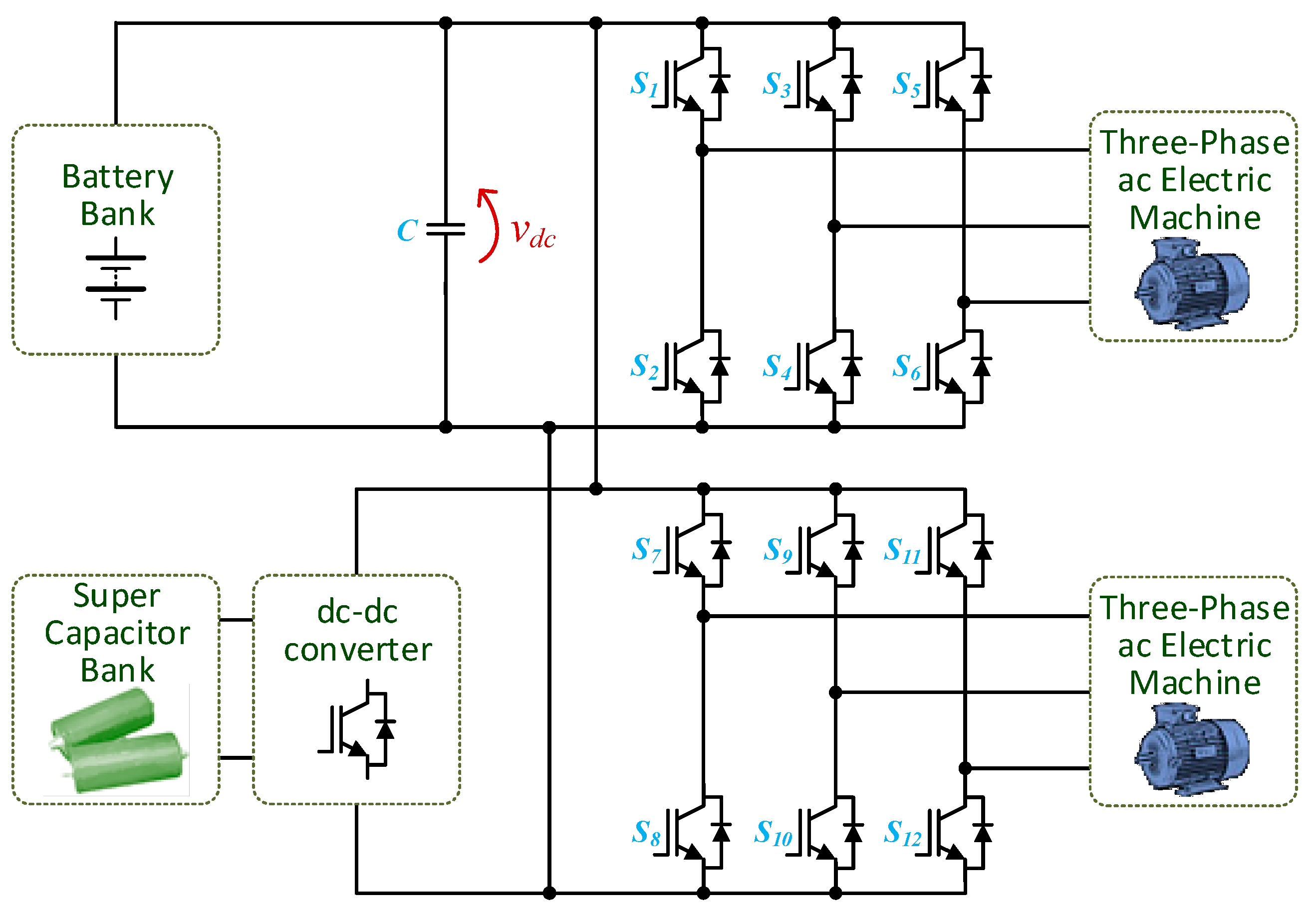{kind=link}
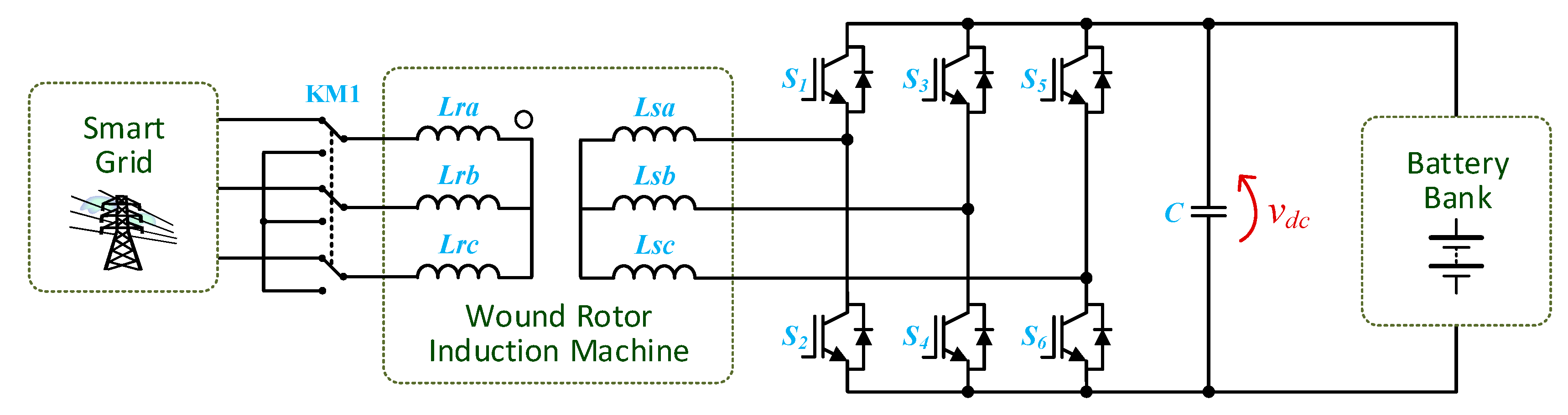{kind=link}
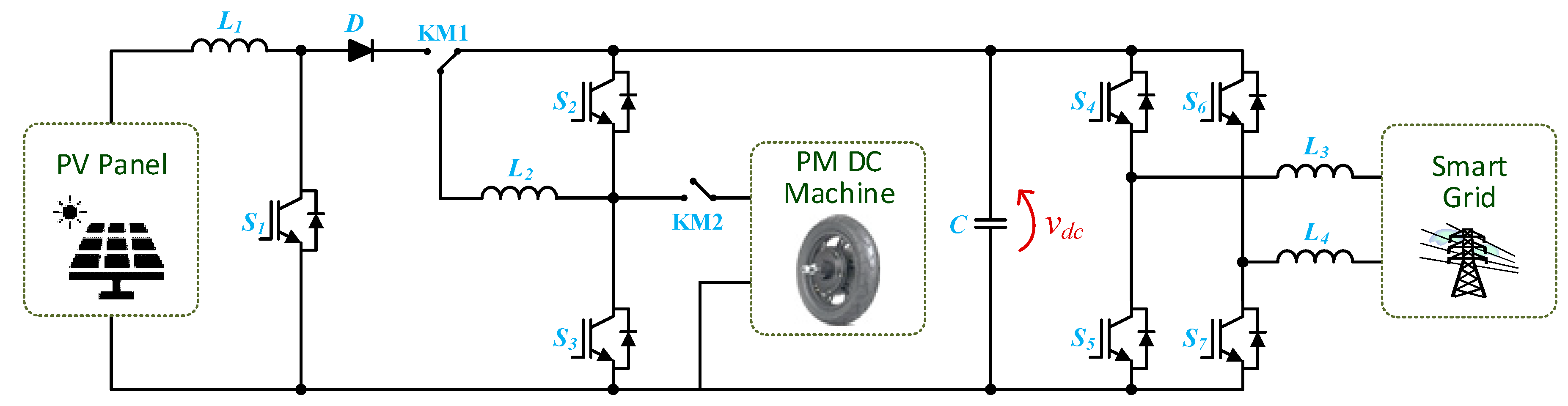{kind=link}
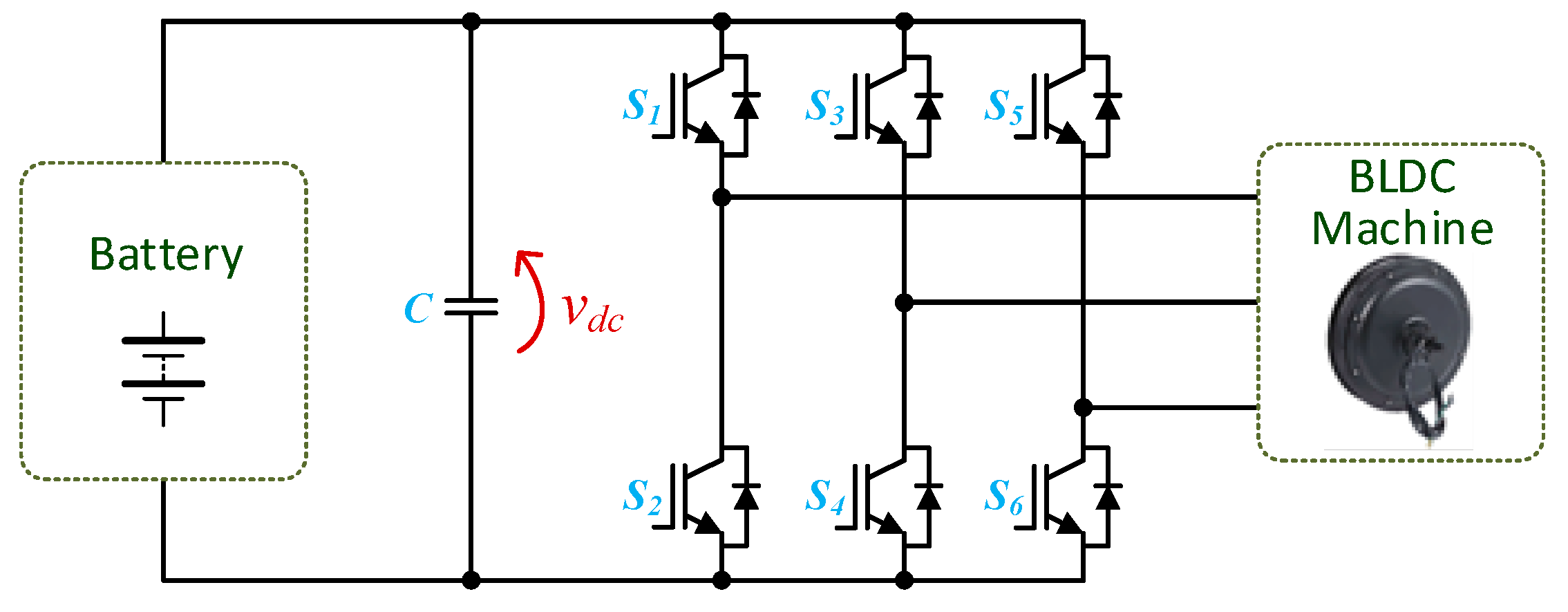{kind=link}
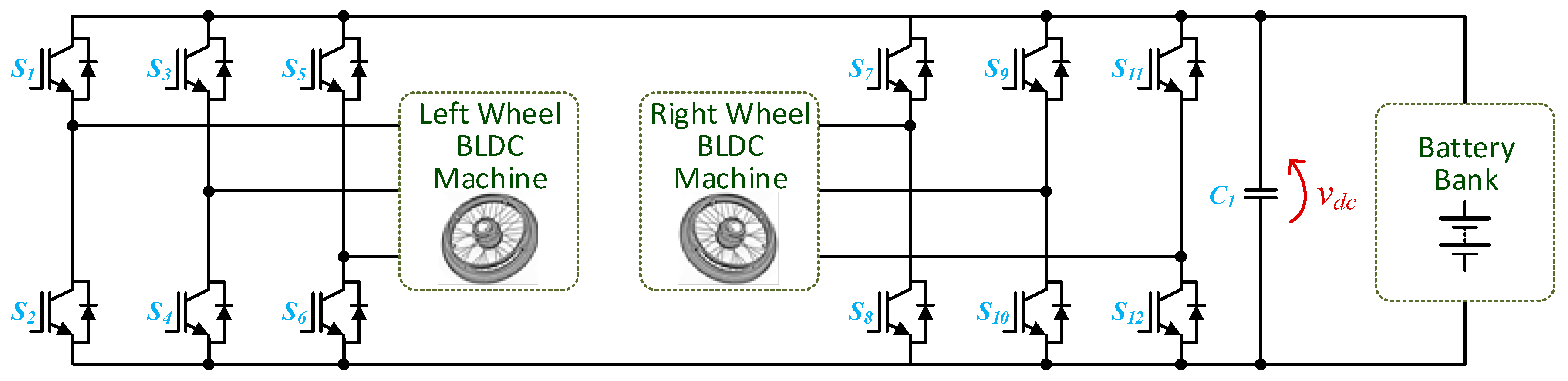{kind=link}
| SAE J2954 Recommendations (as of November 2017) | IWPT Power Classes | ||
|---|---|---|---|
| WPT1 | WPT2 | WPT3 | |
| Maximum Input Power | 3.7 kW | 7.7 kW | 11 kW |
| Frequency Band | 81.38 kHz to 90 kHz | ||
| Maximum Transfer Efficiency | >85% @ full alignment | ||
| SAE J2954 Z-Class | Ground Clearance Range (mm) |
|---|---|
| Z1 | 100–150 |
| Z2 | 140–210 |
| Z3 | 170–250 |
| Multilevel Topology | Interleaved Topology | Galvanic Isolation | Bidirectional Operation | |||
|---|---|---|---|---|---|---|
| on-board | ac–dc | Figure 3a | No | No | No | No |
| Figure 3b | No | No | No | Yes | ||
| Figure 3c | No | Yes | No | Yes | ||
| Figure 3d | Yes | No | No | Yes | ||
| dc–dc | Figure 4a | No | No | No | No | |
| Figure 4b | No | No | No | Yes | ||
| Figure 4c | No | No | Yes | No | ||
| Figure 4d | No | No | Yes | Yes | ||
| off-board | ac–dc | Figure 6a | No | No | No | No |
| Figure 6b | No | No | No | Yes | ||
| Figure 6c | No | Yes | No | Yes | ||
| Figure 6d | No | No | No | Yes | ||
| dc–dc | Figure 7a | No | Yes | No | No | |
| Figure 7b | Yes | Yes | No | Yes | ||
| Figure 7c | No | No | Yes | Yes | ||
| Figure 7d | No | No | Yes | Yes |
| Fast Battery Charging | Bidirectional Operation | Galvanic Isolation | External Inductors | Special Machine | |
|---|---|---|---|---|---|
| S. Haghbin, 2013 [234] | Yes | Yes | No | Yes | No |
| S. Dusmez, 2012 [241] | Yes | Yes | No | Yes | No |
| S. Haghbin, 2013 [237] | Yes | Yes | Yes | No | No |
| A. G. Cocconi, 1994 [242] | Yes | Yes | No | Yes | Yes |
| M. Zaja, 2014 [243] | Yes | Yes | No | No | Yes |
| R. Surada, 2010 [244] | No | Yes | No | Yes | No |
| L. D. Sousa, 2010 [239] | Yes | Yes | No | No | Yes |
| S. Lacroix, 2010 [229] | Yes | Yes | No | No | Yes |
| L. Wang, 2012 [249] | No | No | No | No | Yes |
| O. Hegazy, 2011 [238] | No | Yes | No | Yes | No |
| I. Subotic, 2016 [230] | Yes | Yes | No | No | Yes |
| S. Haghbin, 2012 [233] | No | Yes | No | No | Yes |
| H. C. Chang, 2009 [231] | No | Yes | No | No | Yes |
| G. J. Su, 2011 [235] | Yes | Yes | No | No | No |
| Three-Phase ac Electric Machines | dc Electric Machines | |
|---|---|---|
| Traction power (15 kV or 25 kV ac) |  ac-dc—dc–ac converter |  ac-dc—dc–ac converter |
| Medium Voltage (MV)/Low Voltage (LV) power transformer is essential | ||
| Traction power (750 V–3000 V dc) |  dc–dc—dc–ac converter |  dc–dc converter |
| No need for MV/LV power transformer | ||
| Frequency Conversion | Harmonics Filtering | Reactive Power Compensation | Power Factor Correction | Overloading Capability | Power between Two Substations | ||
|---|---|---|---|---|---|---|---|
| STATCOM (Figure 28a) | No | Yes | Yes | Yes | Yes | No | |
| RPC (Figure 28b) | No | Yes | Yes | Yes | Yes | No | |
| Interface Converter | Between Power Grids (Figure 30) | Yes | Yes (inherent) | Yes (inherent) | Yes | No | Yes |
| Between Traction Substations (Figure 31) | No | No | No | No | No | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Afonso, J.L.; Cardoso, L.A.L.; Pedrosa, D.; Sousa, T.J.C.; Machado, L.; Tanta, M.; Monteiro, V. A Review on Power Electronics Technologies for Electric Mobility. Energies 2020, 13, 6343. https://doi.org/10.3390/en13236343
Afonso JL, Cardoso LAL, Pedrosa D, Sousa TJC, Machado L, Tanta M, Monteiro V. A Review on Power Electronics Technologies for Electric Mobility. Energies. 2020; 13(23):6343. https://doi.org/10.3390/en13236343
Chicago/Turabian StyleAfonso, Joao L., Luiz A. Lisboa Cardoso, Delfim Pedrosa, Tiago J. C. Sousa, Luis Machado, Mohamed Tanta, and Vitor Monteiro. 2020. "A Review on Power Electronics Technologies for Electric Mobility" Energies 13, no. 23: 6343. https://doi.org/10.3390/en13236343
APA StyleAfonso, J. L., Cardoso, L. A. L., Pedrosa, D., Sousa, T. J. C., Machado, L., Tanta, M., & Monteiro, V. (2020). A Review on Power Electronics Technologies for Electric Mobility. Energies, 13(23), 6343. https://doi.org/10.3390/en13236343