Convolutional Neural Network for Dust and Hotspot Classification in PV Modules

 ,
,  ,
,  , ,
, ,  and
and 
Abstract
:1. Introduction
2. PV Systems Efficiency
- (1)
- Plant characteristics: tilt angle, orientation, type of module coverage, module connections, etc.;
- (2)
- Environmental conditions: temperature, humidity and wind speed;
- (3)
- Site characteristics: local vegetation, traffic, air pollution, proximity to the sea.
- is the annual electrical energy supplied to the network (kWh/year);
- is the peak power at standard test conditions (STC) (kWp);
- is the solar irradiance at STC (W/m2);
- is the total annual solar irradiation on the PV module plan (kWh/(m2∙year));
- is the Azimuth angle of the modules;
- is the tilt angle of the modules;
- is the performance ratio;
- is the estimated loss factor due to shadowing;
- is the additional loss factor; this parameter includes the presence of different factors, such as shading, mismatching, dust, soiling and possible module failures.
3. Dust, Soiling and Debris
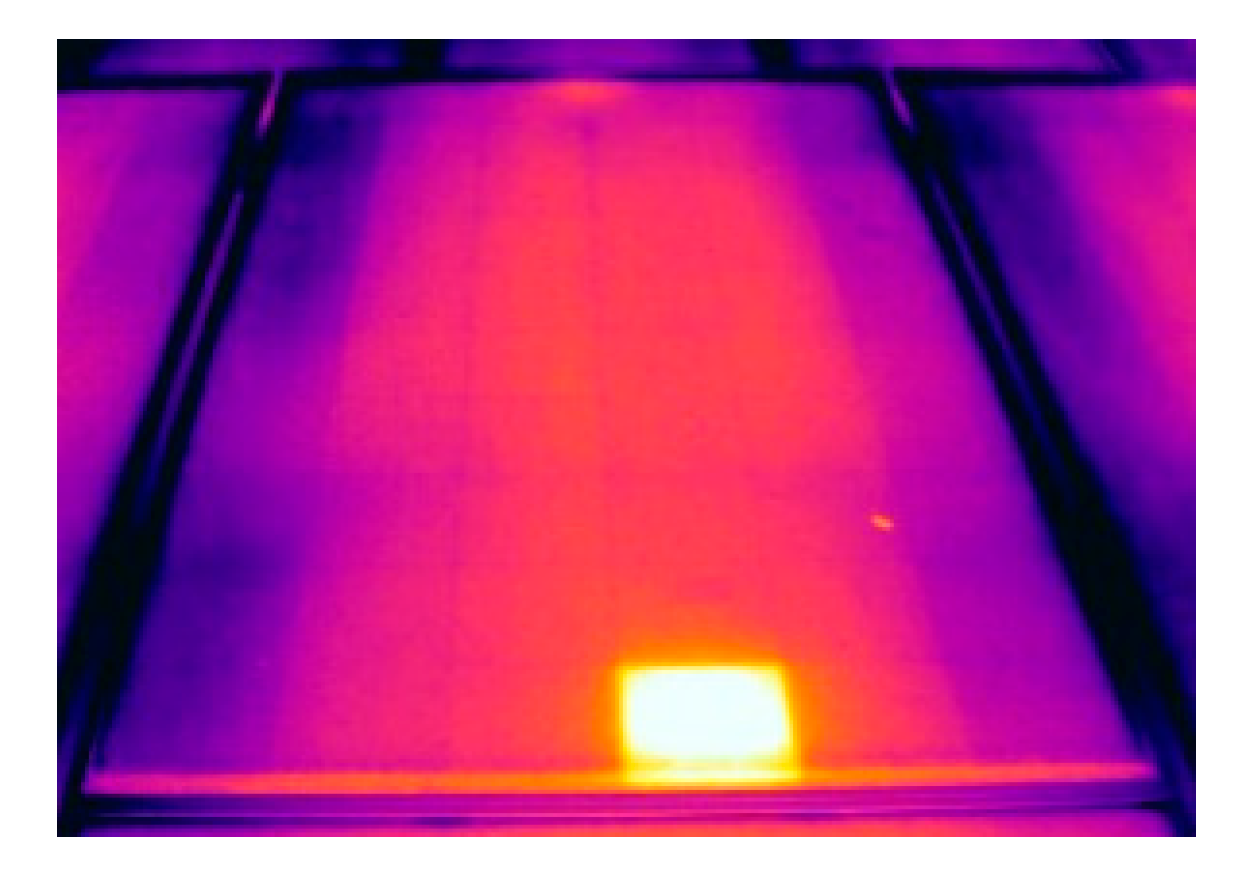
4. Thermographic Analysis to Detect the States of PV Modules
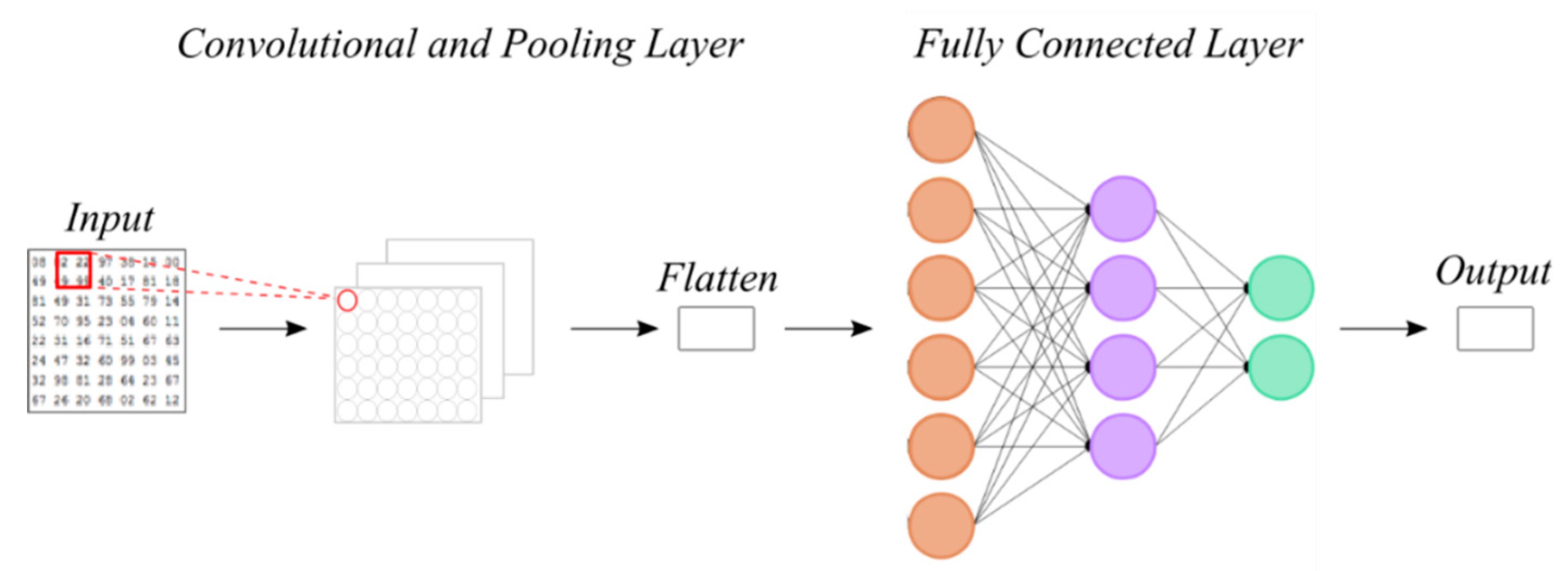
5. Convolutional Neural Network to Classify Thermographic Images
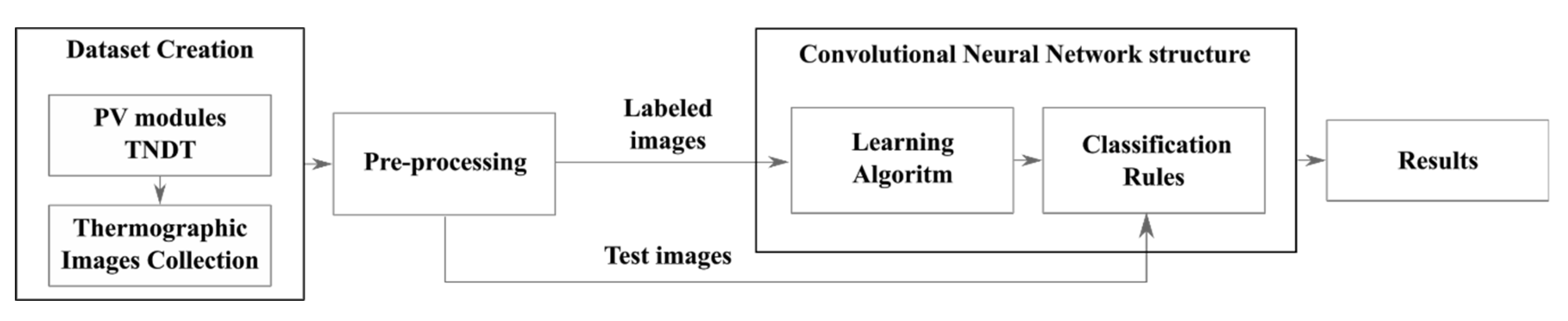
6. Dust and Hotspot Classification Using Convolutional Neural Network
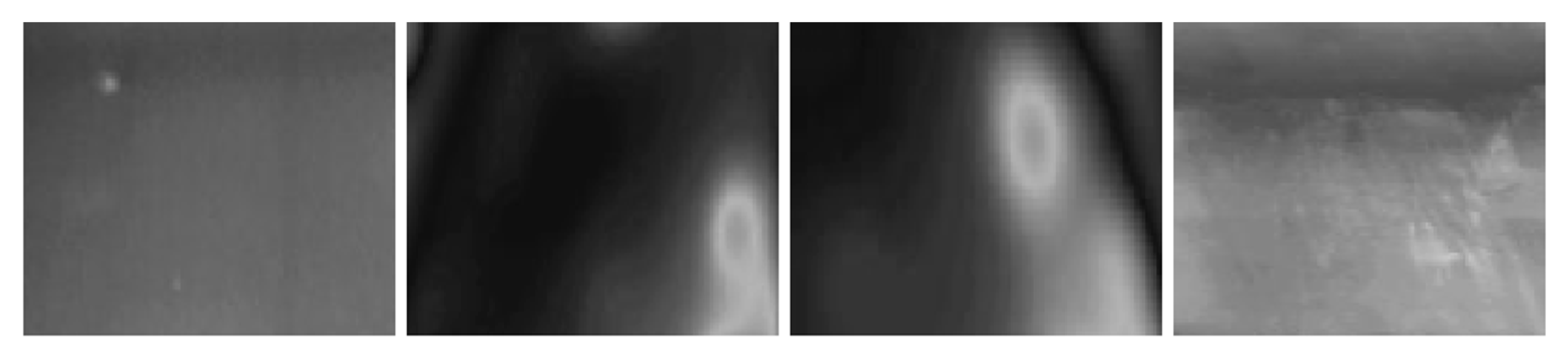
6.1. Dataset Creation
6.2. Pre-Processing Phase
- -
- Grayscaling (G): The color of the thermographic images is generally represented in a different “false color” scale or grayscale depending on the setting and type of thermal image camera.
- -
- Thresholding: To highlight the discontinuities of the modules surfaces, a black and white threshold (or binarization) of the light intensity value of the pixels was performed. In addition, dilated and erodible filters were used to increase the image quality and reduce noise (e.g., salt and pepper noise). The dilator filter allows one to determine the maximum local value of the light intensity of the pixels, expanding the area of the pixels with the highest light intensity value. The erode filter, on the contrary, allows one to identify the minimum local value, expanding the area of the pixels with the lower light intensity value [58].
- -
- Box blur and Sobel–Feldman filters (F): A combination of two images was used to compare the application of the box blur and Sobel–Feldman filter. The box blur filter was used to blur the thermographic image to reduce discontinuities shown on the surfaces of the module [59]. On the contrary, the Sobel–Feldman filter was used to highlight the edges and discontinuity [60].
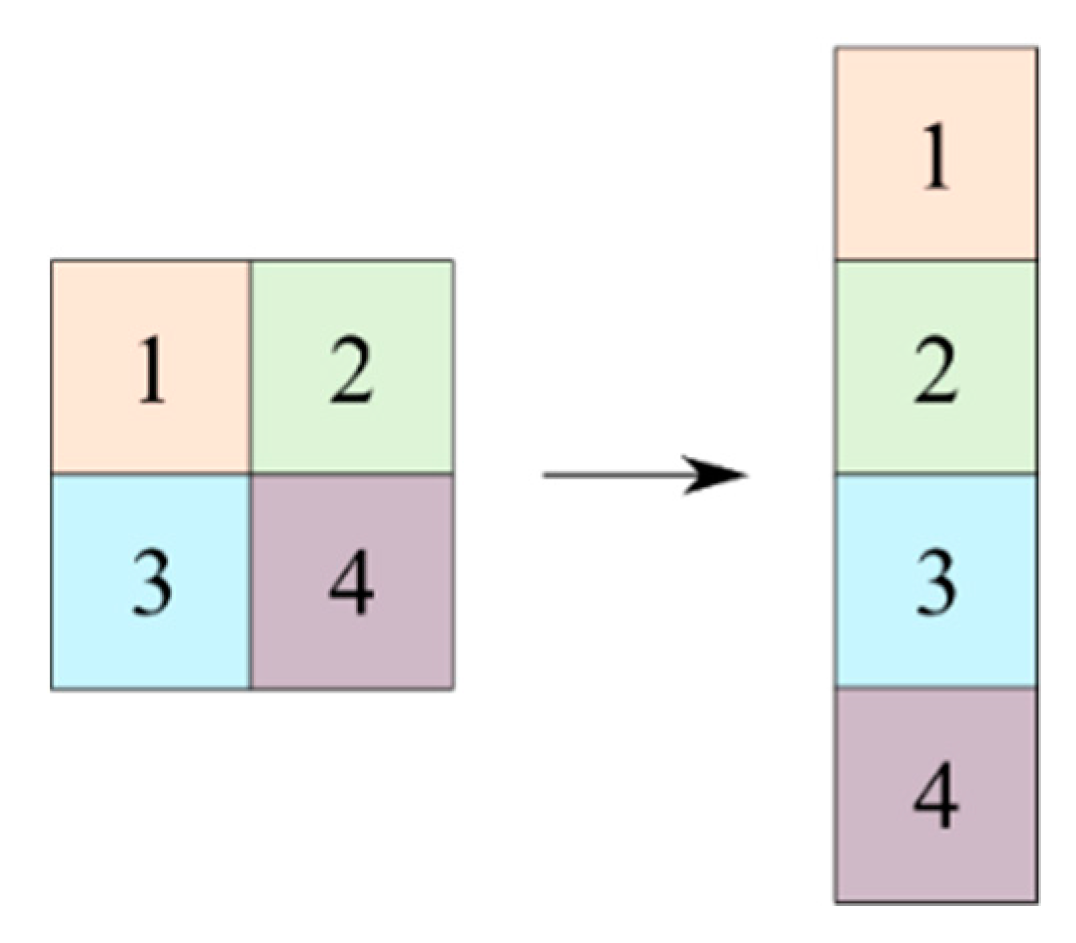
6.3. CNN Models and Configurations
- Image size: The size of 3500 pixels was selected.
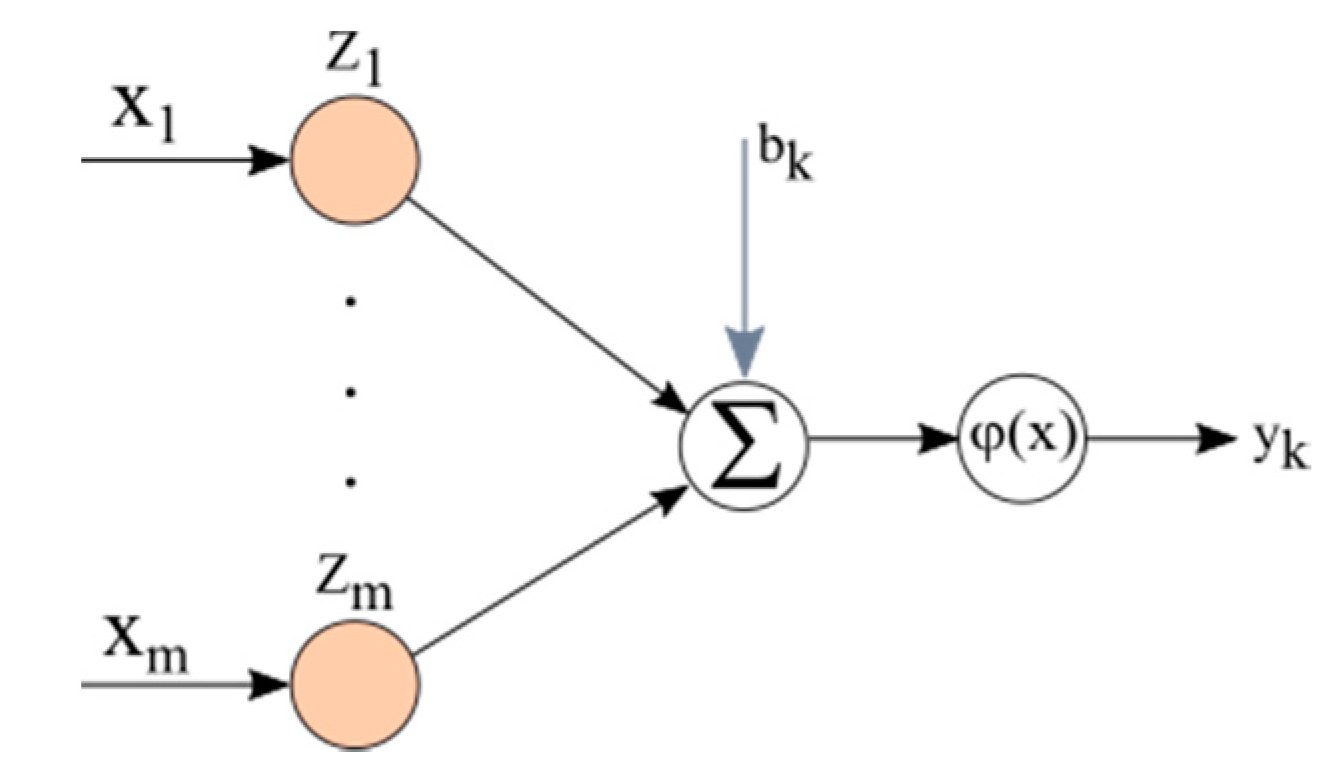
- Number of perceptrons: 20% of the image size was selected as the number of perceptrons.
- Number of epochs: The number of epochs of 15, 30, 45 was chosen to reduce overfitting problem, considering that the images used do not contain faults and dirty parts in the same frame; this helps CNN learn samples faster.
- Batch size: The batch was selected in a small size of 5 and 10 to avoid the overfitting problem and to improve the accuracy of the CNN.
- Optimizer type: Adam and Stochastic Gradient Descent (SGD) optimizers, both with a learning rate of 0.01, were compared to evaluate the quality and speed of convergence.
- Number of filters: The choice of the number of filters was made in accordance with the operation of convolutional layers—in the first convolutional layer, 16 or 32 filters were selected; in the subsequent layers, the number of filters applied were calculated, doubling the number of filters of the previous layer.
- Kernel parameters: According to the images size, (3, 3) and (5, 5) kernels were used with a stride 1.
- Activation function type: The ReLU activation function was used for each convolutional layer and the SoftMax activation function was used for all the models in the output layer. The hyperbolic tangent, Sigmoid and ReLU activation functions were chosen for the fully connected layers.
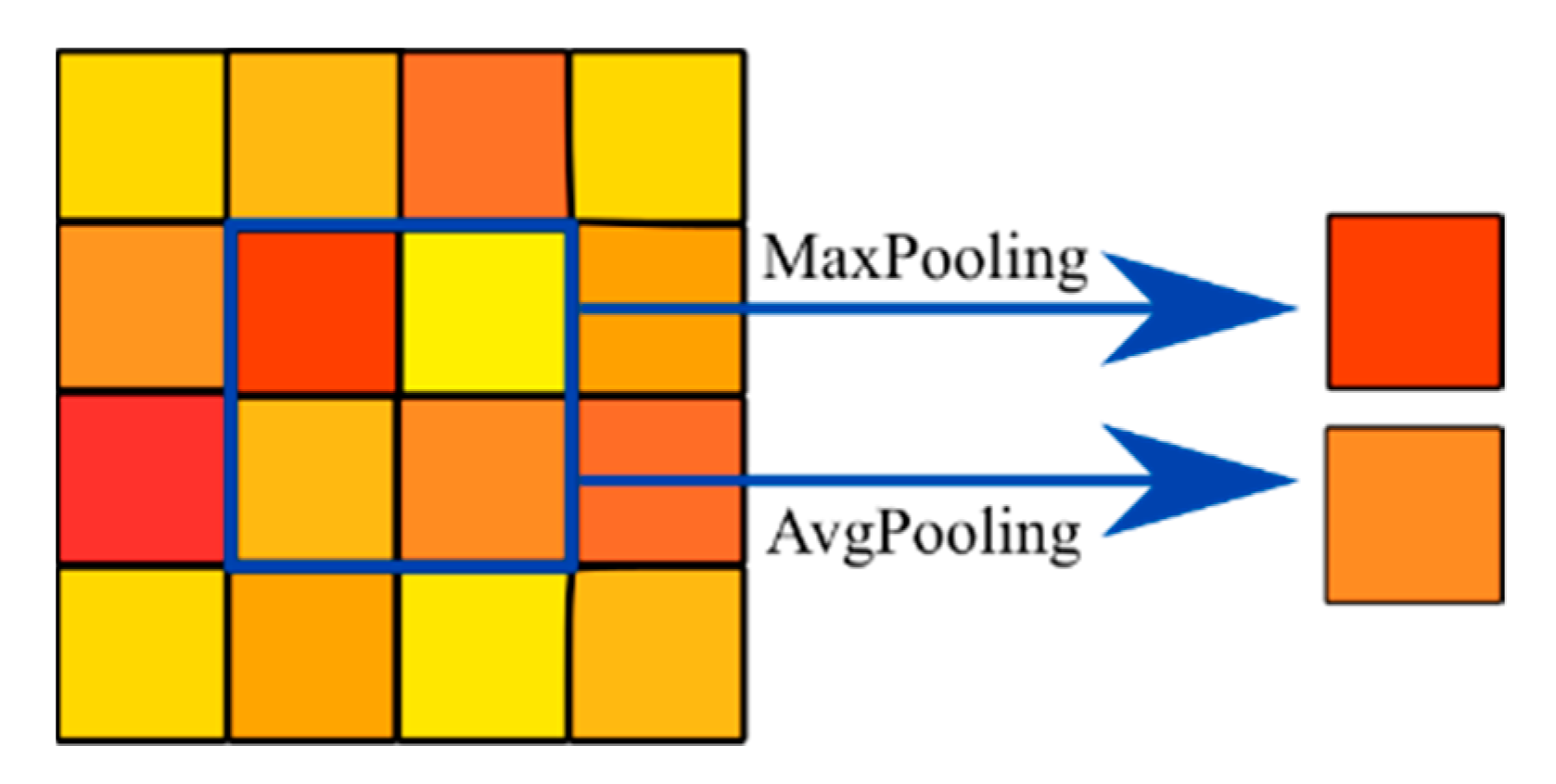
- Pooling function type: The Max-pooling function was used.
7. Results
7.1. Tests without Augmentation Techniques
7.2. Test with Augmentation Techniques
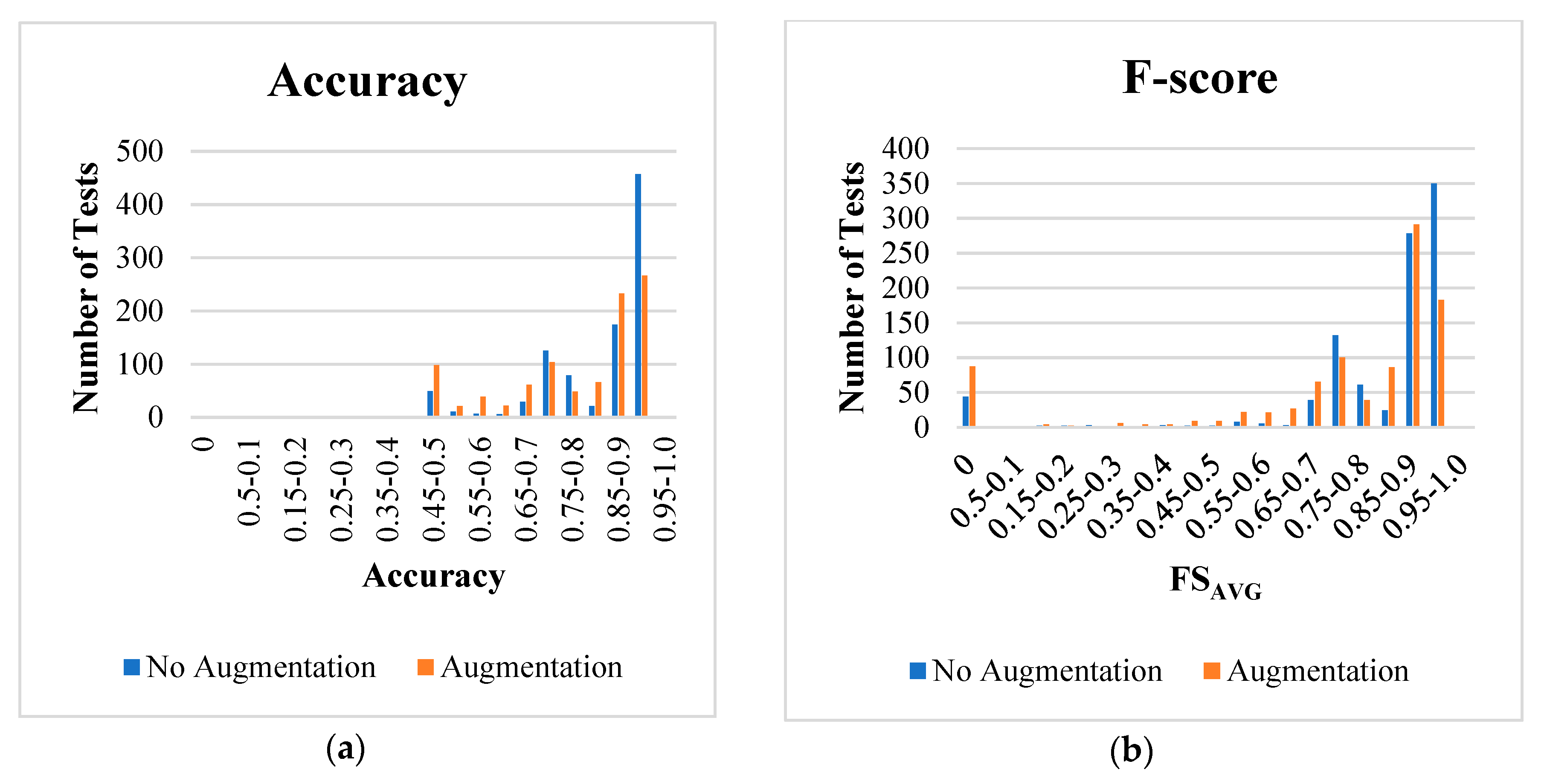
7.3. Comparison between Tests with and without Augmentation Techniques
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| A | accuracy (%) |
| b | bias vector of a fully connected layers network |
| annual electric output energy of the PV system (kWh/year) | |
| ReLU activation function | |
| FN | number of false negative samples |
| FP | number of false positive samples |
| estimated losses factor due to shadowing | |
| FS | f-score (%) |
| FSAVG | arithmetic means of the f-score values (%) |
| solar irradiance at the STC (W/m2) | |
| total annual solar irradiation on PV modules plan (kWh/(m2∙year)) | |
| loss factor including the presence of shading, mismatching, dust, soiling ed possible module failures | |
| N | number of tests |
| performance ratio of the PV system | |
| peak power of the PV system in STC (kWp) | |
| R | recall (%) |
| TN | number of true negative samples |
| TP | number of true positive samples |
| X | input vector of an activation function |
| Z | array containing the number of neurons of the previous layer and the current layer in a fully connected layers network |
| Greek letters | |
| azimuth angle of PV modules (°) | |
| tilt angle of PV modules (°) | |
| generic activation function of a fully connected layers | |
| Subscripts Abbreviations | |
| Aug | Augmentation techniques |
| C | False color image |
| CNN | Convolutional neural network |
| EMALS | Electromagnetic aircraft launch system |
| F | Box blur and Sobel–Feldman filters |
| G | Grayscaling |
| PV | Photovoltaic |
| SGD | Stochastic gradient descent |
| STC | Standard test conditions |
| TNDT | Thermographic non-destructive test |
References
- Colglazier, W. Sustainable development agenda: 2030. Science 2015, 349, 1048–1050. [Google Scholar] [CrossRef] [PubMed]
- GSE. Solare Fotovoltaico-Rapporto Statistico; GSE: Rome, Italy, 2018. [Google Scholar]
- Jäger-Waldau, A. Snapshot of Photovoltaics—February 2020. Energies 2020, 13, 930. [Google Scholar] [CrossRef] [Green Version]
- Nicolini, M.; Tavoni, M. Are renewable energy subsidies effective? Evidence from Europe. Renew. Sustain. Energy Rev. 2017, 74, 412–423. [Google Scholar] [CrossRef]
- European Union. E.U. Directive 2001/77/EC of the European Parliament and of the Council of 27 September 2001 on the Promotion of Electricity Produced from Renewable Energy Sources in the Internal Electricity Market. Off. J. Eur. Union 2001, 283, 82–209. [Google Scholar]
- Köntges, M.; Kurtz, S.; Packard, C.; Jahn, U.; Berger, K.A.; Kato, K.; Friesen, T.; Liu, H.; Iseghem, M.V.; Wohlgemuth, J.; et al. Review of Failures of Photovoltaic Modules; IEA: Paris, France, 2014. [Google Scholar]
- Photovoltaic Geographical Information System; European Communities: Paris, France, 2018.
- Pei, T.; Hao, X. A Fault Detection Method for Photovoltaic Systems Based on Voltage and Current Observation and Evaluation. Energies 2019, 12, 1712. [Google Scholar] [CrossRef] [Green Version]
- Ancuta, F.; Cepisca, C. Fault Analysis Possibilities for PV Panels. In Proceedings of the 3rd International Youth Conference on Energetics (IYCE), Bled, Slovenia, 3–6 July 2011; pp. 1–5. [Google Scholar]
- Musolino, A.; Raugi, M.; Rizzo, R.; Tucci, M. Optimal Design of EMALS Based on a Double-Sided Tubular Linear Induction Motor. IEEE Trans. Plasma Sci. 2015, 43, 1326–1331. [Google Scholar] [CrossRef]
- Jadin, M.S.; Taib, S. Recent progress in diagnosing the reliability of electrical equipment by using infrared thermography. Infrared Phys. Technol. 2012, 55, 236–245. [Google Scholar] [CrossRef] [Green Version]
- Cipriani, G.; Boscaino, V.; Di Dio, V.; Cardona, F.; Zizzo, G.; Di Caro, S.; Sa’Ed, J.A. Application of Thermographic Techniques for the Detection of Failures on Photovoltaic Modules. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Genova, Italy, 10–14 June 2019; pp. 1–5. [Google Scholar]
- Omar, T.; Nehdi, M.L. Remote sensing of concrete bridge decks using unmanned aerial vehicle infrared thermography. Autom. Constr. 2017, 83, 360–371. [Google Scholar] [CrossRef]
- Fenucci, D.; Caffaz, A.; Costanzi, R.; Fontanesi, E.; Manzari, V.; Sani, L.; Stifani, M.; Tricarico, D.; Turetta, A.; Caiti, A. WAVE: A Wave Energy Recovery Module for Long Endurance Gliders and AUVs. In Proceedings of the OCEANS 2016 MTS/IEEE, Monterey, CA, USA, 19–23 September 2016; pp. 1–5. [Google Scholar]
- Salazar, A.M.; Macabebe, E.Q.B. Hotspots Detection in Photovoltaic Modules Using Infrared Thermography. MATEC Web Conf. 2016, 70, 10015. [Google Scholar] [CrossRef] [Green Version]
- Ahmadipour, M.; Hazim, H.; Othman, M.L.; Radzi, M.A.M.; Chireh, N. A Fast Fault Identification in a Grid-Connected Photovoltaic System Using Wavelet Multi-Resolution Singular Spectrum Entropy and Support Vector Machine. Energies 2019, 12, 2508. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Q.; Shao, S.; Lu, L.; Liu, X.; Zhu, H. A New PV Array Fault Diagnosis Method Using Fuzzy C-Mean Clustering and Fuzzy Membership Algorithm. Energies 2018, 11, 238. [Google Scholar] [CrossRef] [Green Version]
- Alsafasfeh, M.; Abdel-Qader, I.; Bazuin, B.; Alsafasfeh, Q.H.; Su, W. Unsupervised Fault Detection and Analysis for Large Photovoltaic Systems Using Drones and Machine Vision. Energies 2018, 11, 2252. [Google Scholar] [CrossRef] [Green Version]
- Bharath, K.V.S.; Blaabjerg, F.; Khan, M.A.; Haque, A. A Novel Fault Classification Approach for Photovoltaic Systems. Energies 2020, 13, 308. [Google Scholar] [CrossRef] [Green Version]
- Ji, D.; Zhang, C.; Lv, M.; Ma, Y.; Guan, N. Photovoltaic Array Fault Detection by Automatic Reconfiguration. Energies 2017, 10, 699. [Google Scholar] [CrossRef] [Green Version]
- Mani, M.; Pillai, R. Impact of dust on solar photovoltaic (PV) performance: Research status, challenges and recommendations. Renew. Sustain. Energy Rev. 2010, 14, 3124–3131. [Google Scholar] [CrossRef]
- Cristaldi, L.; Faifer, M.; Rossi, M.; Catelani, M.; Ciani, L.; Dovere, E.; Jerace, S. Economical Evaluation of PV System Losses Due to the Dust and Pollution. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference, Gratz, Austria, 13–16 May 2012; pp. 614–618. [Google Scholar]
- Teo, J.C.; Tan, R.H.G.; Mok, V.H.; Ramachandaramurthy, V.K.; Tan, C. Impact of Partial Shading on the P-V Characteristics and the Maximum Power of a Photovoltaic String. Energies 2018, 11, 1860. [Google Scholar] [CrossRef] [Green Version]
- Van Sark, W. Photovoltaic system design and performance. Energies 2019, 12, 1826. [Google Scholar] [CrossRef] [Green Version]
- Kudelas, D.; Taušová, M.; Tauš, P.; Gabániová, Ľ.; Koščo, J. Investigation of Operating Parameters and Degradation of Photovoltaic Panels in a Photovoltaic Power Plant. Energies 2019, 12, 3631. [Google Scholar] [CrossRef] [Green Version]
- Olalla, C.; Deline, C.; Maksimovic, D. Performance of Mismatched PV Systems with Submodule Integrated Converters. IEEE J. Photovolt. 2013, 4, 396–404. [Google Scholar] [CrossRef]
- Klugmann-Radziemska, E. Shading, Dusting and Incorrect Positioning of Photovoltaic Modules as Important Factors in Performance Reduction. Energies 2020, 13, 1992. [Google Scholar] [CrossRef] [Green Version]
- Goossens, D.; Offer, Z.; Zangvil, A. Wind tunnel experiments and field investigations of eolian dust deposition on photovoltaic solar collectors. Sol. Energy 1993, 50, 75–84. [Google Scholar] [CrossRef]
- Pavan, A.M.; Mellit, A.; De Pieri, D. The effect of soiling on energy production for large-scale photovoltaic plants. Sol. Energy 2011, 85, 1128–1136. [Google Scholar] [CrossRef]
- El-Shobokshy, M.S.; Hussein, F.M. Effect of dust with different physical properties on the performance of photovoltaic cells. Sol. Energy 1993, 51, 505–511. [Google Scholar] [CrossRef]
- Jiang, H.; Lu, L.; Sun, K. Experimental investigation of the impact of airborne dust deposition on the performance of solar photovoltaic (PV) modules. Atmos. Environ. 2011, 45, 4299–4304. [Google Scholar] [CrossRef]
- Klugmann-Radziemska, E.; Rudnicka, M. The Analysis of Working Parameters Decrease in Photovoltaic Modules as a Result of Dust Deposition. Energies 2020, 13, 4138. [Google Scholar] [CrossRef]
- Montes, C.; Gonzalez-Díaz, B.; Linares, A.; Llarena, E. Effects of the Saharan Dust Hazes in the Performance of Multi-MW PV Gridconnected Facilities in the Canary Islands (Spain). In Proceedings of the 25th European Photovoltaic Solar Energy Conference and Exhibition, Valencia, Spain, 6–10 September 2010; pp. 5046–5049. [Google Scholar]
- Zorrilla-Casanova, J.; Piliougine, M.; Carretero Rubio, J.E.; Bernaola-Galvan, P. Analysis of Dust Losses in Photovoltaic Modules. In Proceedings of the World Renewable Energy Congress-Sweden, Linköping, Sweden, 8–13 May 2011; pp. 2985–2992. [Google Scholar]
- Hassan, A.H.; Rahoma, U.A.; Elminir, H.K.; Fathy, A.M. Effect of airborne dust concentration on the performance of PV modules. J. Astron. Soc. Egypt 2005, 13, 24–38. [Google Scholar]
- Buerhop, C.; Scheuerpflug, H. Field Inspection of PV-Modules Using Aerial, Drone-Mounted Thermography. In Proceedings of the 29th European Photovoltaic Solar Energy Conference and Exhibition (EU PVSEC 2014), Amsterdam, The Netherlands, 22–26 September 2014; pp. 2975–2979. [Google Scholar]
- Parlevliet, D.A.; Urmee, T.; Parlevliet, D.A. PV system defects identification using Remotely Piloted Aircraft (RPA) based infrared (IR) imaging: A review. Sol. Energy 2020, 206, 579–595. [Google Scholar] [CrossRef]
- Buerhop, C.; Weißmann, R.; Scheuerpflug, H.; Auer, R.; Brabec, C.J. Quality Control of PV-Modules in the Field Using a Remote-Controlled Drone with an Infrared Camera. In Proceedings of the 27th European Photovoltaic Solar Energy Conference and Exhibition (EU PVSEC 2012), Frankfurt, Germany, 24–28 September 2012; pp. 3370–3373. [Google Scholar]
- IEC. IEC TS 62446-3-Photovoltaic (PV) Systems-Requirements for Testing, Documentation and Maintenance-Part 3: Photovoltaic Modules and Plants-Outdoor Infrared Thermography; IEC: Geneva, Switzerland, 2017. [Google Scholar]
- Gallardo-Saavedra, S.; Hernández-Callejo, L.; Duque-Perez, O. Technological review of the instrumentation used in aerial thermographic inspection of photovoltaic plants. Renew. Sustain. Energy Rev. 2018, 93, 566–579. [Google Scholar] [CrossRef]
- Grimaccia, F.; Aghaei, M.; Mussetta, M.; Leva, S.; Quater, P.B. Planning for PV plant performance monitoring by means of unmanned aerial systems (UAS). Int. J. Energy Environ. Eng. 2015, 6, 47–54. [Google Scholar] [CrossRef] [Green Version]
- Quater, P.B.; Grimaccia, F.; Leva, S.; Mussetta, M.; Aghaei, M. Light Unmanned Aerial Vehicles (UAVs) for Cooperative Inspection of PV Plants. IEEE J. Photovolt. 2014, 4, 1107–1113. [Google Scholar] [CrossRef] [Green Version]
- Spagnolo, G.S.; Vecchio, P.D.; Makary, G.; Papalillo, D.; Martocchia, A. A Review of IR Thermography Applied to PV Systems. In Proceedings of the 11th International Conference on Environment and Electrical Engineering, Venice, Italy, 18–25 May 2012; pp. 879–884. [Google Scholar]
- Ketkar, N. Introduction to Keras. In Deep Learning with Python; Springer: Berlin/Heidelberg, Germany, 2017; pp. 97–111. [Google Scholar]
- Dorobantu, L.; Popescu, M.O.; Popescu, C.L. Yield Loss of Photovoltaic Panels Caused by Depositions. In Proceedings of the 7th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 7–9 May 2011; pp. 1–4. [Google Scholar]
- Ancuta, F.; Cepisca, C. Analysis of PV Panels Faults by Thermography. Proc. EVER Monaco 2011, 11–28, 128–134. [Google Scholar]
- Hopfield, J.J. Neural networks and physical systems with emergent collective computational abilities. Proc. Natl. Acad. Sci. USA 1982, 79, 2554–2558. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pang, B.; Lee, L.; Vaithyanathan, S. Thumbs up? Sentiment classification using machine learning techniques. arXiv 2002, arXiv:cs/0205070. Available online: https://arxiv.org/abs/cs/0205070 (accessed on 4 December 2019).
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60. [Google Scholar] [CrossRef]
- Hubel, D.H.; Wiesel, T.N. Receptive fields of single neurones in the cat’s striate cortex. J. Physiol. 1959, 148, 574–591. [Google Scholar] [CrossRef] [PubMed]
- Lawrence, S.; Giles, C.L.; Tsoi, A.C.; Back, A.D. Face recognition: A convolutional neural-network approach. IEEE Trans. Neural Netw. 1997, 8, 98–113. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, L.; Ren, J.S.J.; Liu, C.; Jia, J. Deep convolutional neural network for image deconvolution. Adv. Neural Inf. Process. Syst. 2014, 27, 1790–1798. [Google Scholar]
- Gardner, M.W.; Dorling, S.R. Artificial neural networks (the multilayer perceptron)—A review of applications in the atmospheric sciences. Atmos. Environ. 1998, 32, 2627–2636. [Google Scholar] [CrossRef]
- Estebon, M.D. Perceptrons: An Associative Learning Network. Spring. 1997. Available online: http://ei.cs.vt.edu/history/Perceptrons.Estebon.html (accessed on 20 September 2020).
- Jiang, X.; Pang, Y.; Li, X.; Pan, J.; Xie, Y. Deep neural networks with Elastic Rectified Linear Units for object recognition. Neurocomputing 2018, 275, 1132–1139. [Google Scholar] [CrossRef]
- Bera, S.; Shrivastava, V.K. Analysis of various optimizers on deep convolutional neural network model in the application of hyperspectral remote sensing image classification. Int. J. Remote Sens. 2019, 41, 2664–2683. [Google Scholar] [CrossRef]
- Lawrence, S.; Giles, C.L.; Tsoi, A.C. Lessons in Neural Network Training: Overfitting May Be Harder Than Expected. In Proceedings of the Fourteenth National Conference on Artificial Intelligence and Ninth Innovative Applications of Artificial Intelligence Conference, AAAI 97, IAAI 97, Providence, RI, USA, 27–31 July 1997; pp. 540–545. [Google Scholar]
- Li, Y.; Wang, J.; Zhao, H. Image Processing Method and Apparatus Using Self-Adaptive Binarization. U.S. Patent US7062099B2, 13 June 2006. [Google Scholar]
- Hummel, R.A.; Kimia, B.; Zucker, S.W. Deblurring Gaussian blur. Comput. Vis. Graph. Image Process. 1987, 38, 66–80. [Google Scholar] [CrossRef]
- Sobel, I.; Feldman, G. A 3x3 Isotropic Gradient Operator for Image Processing. In Pattern Classification and Scene Analysis; Wiley: New York, NY, USA, 1973. [Google Scholar]
- Mikolajczyk, A.; Grochowski, M. Data augmentation for improving deep learning in image classification problem. In Proceedings of the 2018 International Interdisciplinary PhD Workshop (IIPhDW), Świnoujście, Poland, 9–12 May 2018; pp. 117–122. [Google Scholar]
- Perez, L.; Wang, J. The effectiveness of data augmentation in image classification using deep learning. arXiv 2017, arXiv:171204621. Available online: https://arxiv.org/abs/1712.04621 (accessed on 20 December 2019).
- Forbes, A.D. Classification-algorithm evaluation: Five performance measures based onconfusion matrices. J. Clin. Monit. 1995, 11, 189–206. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Name | Convolutional and Pooling Layer | Activation Function | Fully Connected Layers | Activation Function |
|---|---|---|---|---|
| M1 | 3 | ReLU | 2 | ReLU |
| M2 | 4 | 2 | ||
| M3 | 3 | 3 | ||
| M4 | 3 | 2 | Sigmoid | |
| M5 | 3 | 2 | Hyperbolic tangent |
| N | Pre-Processing | Epochs | Optimizer | Model | Batch Size | Kernel Size | Filter Size | Duration (s) | Accuracy |
|---|---|---|---|---|---|---|---|---|---|
| 1 | F | 45 | Adam | M2 | 10 | 3 | 32 | 126.337 | 0.98 |
| 2 | C | 30 | Adam | M1 | 5 | 3 | 32 | 109.649 | 0.98 |
| 3 | F | 30 | Adam | M1 | 5 | 3 | 32 | 123.717 | 0.97 |
| 4 | F | 30 | Adam | M1 | 10 | 3 | 32 | 83.021 | 0.97 |
| 5 | F | 30 | Adam | M5 | 5 | 5 | 32 | 186.361 | 0.97 |
| 6 | F | 45 | Adam | M5 | 5 | 5 | 32 | 289.250 | 0.97 |
| 7 | G | 30 | SGD | M3 | 10 | 3 | 32 | 0.002 | 0.97 |
| 8 | G | 15 | SGD | M1 | 5 | 3 | 16 | 0.001 | 0.97 |
| N | True Positive | False Positive | False Negative | True Negative | Accuracy |
|---|---|---|---|---|---|
| 1 | 59 | 1 | 2 | 58 | 0.98 |
| 2 | 59 | 1 | 2 | 58 | 0.98 |
| 3 | 58 | 2 | 2 | 58 | 0.97 |
| 4 | 58 | 2 | 2 | 58 | 0.97 |
| 5 | 58 | 2 | 2 | 58 | 0.97 |
| 6 | 58 | 2 | 2 | 58 | 0.97 |
| 7 | 60 | 0 | 4 | 56 | 0.97 |
| 8 | 58 | 2 | 2 | 58 | 0.97 |
| Dust | Hot spot | ||||
| N | Pre-Processing | Epochs | Optimizer | Model | Batch Size | Kernel Size | Filter Size | Duration (s) | Accuracy |
|---|---|---|---|---|---|---|---|---|---|
| 9 | G | 30 | SGD | 2 | 5 | 3 | 16 | 0.002 | 0.98 |
| 10 | F | 45 | Adam | 1 | 5 | 3 | 32 | 165.443 | 0.97 |
| 11 | C | 30 | Adam | 0 | 5 | 3 | 32 | 125.817 | 0.97 |
| 12 | C | 30 | Adam | 1 | 5 | 3 | 32 | 112.898 | 0.97 |
| 13 | C | 45 | SGD | 3 | 5 | 3 | 32 | 0.002 | 0.97 |
| 14 | C | 45 | Adam | 1 | 5 | 3 | 16 | 0.001 | 0.97 |
| 15 | C | 45 | Adam | 3 | 5 | 3 | 16 | 0.001 | 0.97 |
| 16 | C | 45 | Adam | 3 | 5 | 3 | 32 | 0.002 | 0.97 |
| N | True Positive | False Positive | False Negative | True Negative | Accuracy |
|---|---|---|---|---|---|
| 9 | 59 | 1 | 2 | 58 | 0.98 |
| 10 | 59 | 1 | 3 | 57 | 0.97 |
| 11 | 59 | 1 | 3 | 57 | 0.97 |
| 12 | 58 | 2 | 2 | 58 | 0.97 |
| 13 | 58 | 2 | 2 | 58 | 0.97 |
| 14 | 57 | 3 | 1 | 59 | 0.97 |
| 15 | 59 | 1 | 3 | 57 | 0.97 |
| 16 | 59 | 1 | 3 | 57 | 0.97 |
| Dust | Hot spot | ||||
| Configuration | Parameters | FSAVG | Standard Deviation | ||
|---|---|---|---|---|---|
| No Aug | Aug | No Aug | Aug | ||
| pre-processing | F | 0.9304 | 0.8674 | 0.60 | 2.08 |
| epochs | 45 | 0.8510 | 0.8069 | 3.62 | 4.70 |
| optimizer | SGD | 0.8440 | 0.7971 | 3.83 | 4.79 |
| model | M1 | 0.8617 | 0.8109 | 0.02 | 0.04 |
| batch size | 5 | 0.8485 | 0.7663 | 4.02 | 5.95 |
| kernel size | 5 | 0.8596 | 0.8166 | 3.17 | 3.86 |
| filter size | 16 | 0.8583 | 0.7093 | 3.27 | 4.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cipriani, G.; D’Amico, A.; Guarino, S.; Manno, D.; Traverso, M.; Di Dio, V. Convolutional Neural Network for Dust and Hotspot Classification in PV Modules. Energies 2020, 13, 6357. https://doi.org/10.3390/en13236357
Cipriani G, D’Amico A, Guarino S, Manno D, Traverso M, Di Dio V. Convolutional Neural Network for Dust and Hotspot Classification in PV Modules. Energies. 2020; 13(23):6357. https://doi.org/10.3390/en13236357
Chicago/Turabian StyleCipriani, Giovanni, Antonino D’Amico, Stefania Guarino, Donatella Manno, Marzia Traverso, and Vincenzo Di Dio. 2020. "Convolutional Neural Network for Dust and Hotspot Classification in PV Modules" Energies 13, no. 23: 6357. https://doi.org/10.3390/en13236357
APA StyleCipriani, G., D’Amico, A., Guarino, S., Manno, D., Traverso, M., & Di Dio, V. (2020). Convolutional Neural Network for Dust and Hotspot Classification in PV Modules. Energies, 13(23), 6357. https://doi.org/10.3390/en13236357