An Active FTC Strategy Using Generalized Proportional Integral Observers Applied to Five-Phase PMSG based Tidal Current Energy Conversion Systems

 ,
,  ,
,
Abstract
:
1. Introduction
2. System Description and Modelling
2.1. Resource of Tidal Current
2.2. Tidal Current Turbine
2.3. Dynamic Model of Five-Phase PMSG
3. Proposed AFTC Strategy
3.1. Principle of GPIO-Based AFTC Strategy in a Classical Close-Loop System
3.2. GPIO-Based AFTC Strategy Design Example for a Five-Phase PMSG Power Convertion System
3.2.1. Basic Control Strategy in Dual Loops
- Optimal control references
- PI-based controller design in dual loops
3.2.2. Observer Design
- Analysis of lumped disturbance terms
- Construction of GPIO
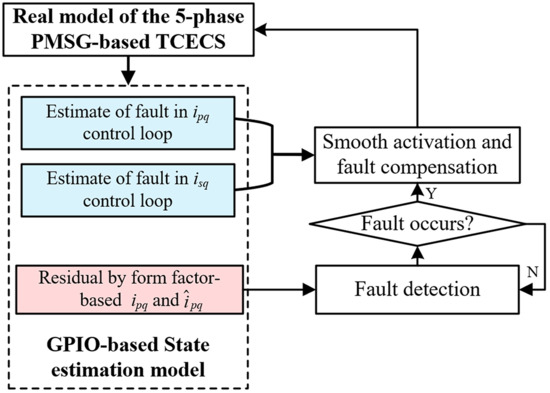
3.2.3. Procedures of the Proposed AFTC Strategy
- Fault detection
- Fault compensation
4. Experimental Verification
4.1. Description of Small-Scale Power Experimental Platform
4.2. Performance in Healthy and Faulty Conditions
4.2.1. Disturbance Suppression in Healthy Conditions
4.2.2. Performance of Active Fault-Tolerant Control in Faulty Conditions
- Performance under an OSF case without using AFTC
- Performance under an OSF case using AFTC
- Spectrum analysis of torque
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| PMSG | Permanent magnet synchronous generator |
| TCECS | Tidal current energy conversion systems |
| PFTC | Passive fault-tolerant control |
| AFTC | Active fault-tolerant control |
| OSF | Open switch fault |
| GPIO | Generalized proportional integral observer |
| FFs | Form factors |
| MPPT | Maximum power point tracking |
| Back-EMFs | Back-electromagnetic forces |
| TSR | Tip speed ratio |
| DOB | Disturbance observer |
| ESO | Extended state observer |
| SISO | Single input single output |
| FOC | Field-oriented control |
| FFT | Fast Fourier transform |
| DC | Direct current |
| PC | Personal computer |
| ILC | Iterative learning control |
Nomenclatures
| P | Power of tidal current turbine |
| ρ | Density of sea water |
| R | Radius of turbine blade |
| Cp | Power coefficient |
| Cpmax | Maximum power coefficient |
| k | k = 1, 2, 3, 4, 5 for five phases |
| uk | Output voltage of the kth phase |
| ek | Back-EMF of the kth phase |
| ik | Phase current of the kth phase |
| upd | d-axis output of primary sub-machine |
| upq | q-axis output of primary sub-machine |
| usd | d-axis output of secondary sub-machine |
| usq | q-axis output of secondary sub-machine |
| epd | d-axis back-EMF of primary sub-machine |
| epq | q-axis back-EMF of primary sub-machine |
| esd | d-axis back-EMF of secondary sub-machine |
| esq | q-axis back-EMF of secondary sub-machine |
| ipd | d-axis current of primary sub-machine |
| ipq | q-axis current of primary sub-machine |
| isd | d-axis current of secondary sub-machine |
| isq | q-axis current of secondary sub-machine |
| Rs | Phase resistance |
| Rpd | d-axis resistance of primary sub-machine |
| Rpq | q-axis resistance of primary sub-machine |
| Rsd | d-axis resistance of secondary sub-machine |
| x1 | System state |
| Estimate of the system state | |
| x2 | Lumped disturbance state |
| Estimate of lumped disturbance state | |
| Estimate of the third state | |
| n | Order of observer states |
| Estimate of the nth state | |
| Estimate of the system feedback | |
| dl | Lumped disturbance of SISO system |
| Δpara | Term du to parameter variation |
| Δf | Term due to fault occurrence |
| Reference of ipd | |
| Reference of ipq | |
| Reference of isd | |
| Reference of isq | |
| Ω* | Reference speed of generator |
| Γopt | Optimal mechanical torque |
| Reference of electromagnetic torque | |
| Xr | Magnetic ratio between 2 sub-machines |
| dl_pq | q-axis lumped disturbance in ipq loop |
| dl_sq | q-axis lumped disturbance isq loop |
| Δpara_pq | Parameter variation term in ipq loop |
| Δpara_sq | Parameter variation term in isq loop |
| Δf_pq | Term due to fault occurrence in ipq loop |
| Δf_sq | Term due to fault occurrence in isq loop |
| Δnoise_pq | Term of measurement noise in ipq loop |
| Δnoise_sq | Term of measurement noise in isq loop |
| Rs_norminal | Nominal value of phase resistance |
| Lpr_norminal | Nominal value of the input gain b1 |
| Lse_norminal | Nominal value of the input gain c1 |
| Φ1_ norminal | Nominal value of Φ1 |
| Φ3_ norminal | Nominal value of Φ3 |
| xpq1 | System state corresponding to ipq |
| ipq_ff | Form factor of ipq |
| epq | Observer error between and ipq |
| Form factor of | |
| γ | Activation function’s bandwidth coefficient |
| t0 | Starting time of compensation |
| t1 | Ending time of compensation |
| fcnstep | Activation function by a step |
| fcnsigmoid | Activation function by a sigmoid |
| λ | Tip speed ratio |
| λopt | Optimal tip speed ratio |
| β | Pitch angle |
| C1–C6 | Coefficients of function Cp(λ, β) |
| Rsq | q-axis resistance of secondary sub-machine |
| M1 | Adjacent phase mutual inductances |
| M2 | Non-adjacent phase mutual inductances |
| Ls | Self-inductance of phase windings |
| Lpd | d-axis inductance of primary sub-machine |
| Lpq | q-axis inductance of primary sub-machine |
| Lsd | d-axis inductance of secondary sub-machine |
| Lsq | q-axis inductance of secondary sub-machine |
| Lpr | Primary sub-machine inductance |
| Lse | Secondary sub-machine inductance |
| h | The number of harmonic orders |
| θ | Electrical angle |
| p | Number of pole pairs |
| Ω | Measured speed of generator |
| Φh | hth order magnet flux component |
| TPark | Park’s transformation matrix |
| J | Inertia of generator |
| f | Friction of five-phase PMSG |
| Γ | Mechanical torque |
| Γem | Electromagnetic torque |
| Δnoise | Term due to measurement noises |
| a1 | Input gain of SISO system |
| a1_norminal | Nominal value of the input gain a1 |
| b1 | Output gain of SISO system |
| b1_norminal | Nominal value of the input gain b1 |
| c1 | Measurement gain of SISO system |
| c1_norminal | Nominal value of the input gain c1 |
| α1–αn | observer gains for state – |
| ucomp | Compensated output of SISO system |
| fcnact | Activation function |
| Kcomp | Gain of compensator in SISO system |
| Kt | Gain between and |
| Kpwm | Gain of converter model |
| Tpwm | Switching period |
| fpwm | Switching frequency |
| Vcarrier | Amplitude of carrier signals |
| TΩ | Time constant in speed loop |
| τΩ | Sampling delay of speed |
| xsq1 | System state corresponding to isq |
| Estimate of xpq1 | |
| Estimate of xsq1 | |
| xpq2 | Lumped disturbance state in ipq loop |
| xsq2 | Lumped disturbance state in isq loop |
| Estimate of xpq2 | |
| Estimate of xsq2 | |
| Estimate of the third state in ipq loop | |
| Estimate of the third state in isq loop | |
| Estimate of the nth state in ipq loop | |
| Estimate of the nth state in isq loop | |
| αpq1–αpqn | observer gains for state – |
| αsq1–αsqn | observer gains for state – |
| upq_comp | Compensated output in ipq loop |
| usq_comp | Compensated output in isq loop |
| fcnact | Activation function |
| Kpr | Gain of compensator in ipq loop |
| Kse | Gain of compensator in isq loop |
| Vrotor | Regulating voltage of DC motor’s rotor |
| Vstator | Regulating voltage of DC motor’s stator |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value/Type |
|---|---|---|
| Pn-gen | Nominal power of five-phase PMSG working at 110 Hz | 3.3 kW |
| f | Friction of five-phase PMSG | 0.123 |
| J | Inertia of generator | 0.00137 kg·m2 |
| Vdc | Voltage in DC link | 100 V |
| Ωn | Nominal speed of generator working at 110 Hz | 2200 rpm |
| p | Number of pole pairs | 3 |
| Φ1, Φ3 | Magnet flux relative to 1st and 3rd harmonics | 0.150 Wb, 0.0149 Wb |
| Rs | Generator stator resistance | 0.540 Ω |
| IGBT module | Power switch module integrated two Infineon IGBTs | Semikron SKM50 GB12T4 |
| Cdc | 4 × (2200 µF/400 V) SKC 2M2 40A-150 | 2.20 mF |
| Load | A resistive load | 242 Ω |
| Lpr | Equivalent inductance of primary sub-machine | 5.1 mH |
| Lse | Equivalent inductance of second sub-machine | 3.2 mH |
| Tpwm | Switching period | 0.1 ms |
| FD | Fault status | 0 (healthy) or 1 (faulty) |
| Composite Controllers | Symbol | Value |
|---|---|---|
| Speed loop controller | KpΩ | 2.12 |
| KiΩ | 848.85 | |
| Current loop controllers | Kppd, Kppq | 17 |
| Kipd, Kipq | 1800 | |
| Kpsd, Kpsq | 10.67 | |
| Kisd, Kisq | 1800 | |
| αpq1 = αpq2 = αpq3 | 0.9 × 104 | |
| αpq1 = αpq2 = αpq3 | 1.5 × 104 | |
| Kpr, Kse | 0.95 |
References
- Ren, Z.Y.; Wang, Y.M.; Li, H.; Liu, X.; Wen, Y.F.; Li, W.Y. A Coordinated Planning Method for Micrositing of Tidal Current Turbines and Collector System Optimization in Tidal Current Farms. IEEE Trans. Power Syst. 2019, 34, 292–302. [Google Scholar] [CrossRef]
- Sousounis, M.C.; Shek, J.K.H.; Mueller, M.A. Modelling, control and frequency domain analysis of a tidal current conversion system with onshore converters. IET Renew. Power Gen. 2016, 10, 158–165. [Google Scholar] [CrossRef] [Green Version]
- Li, G.J.; Ren, B.; Zhu, Z.Q. Design guidelines for fractional slot multi-phase modular permanent magnet machines. IET Electr. Power Appl. 2017, 11, 1023–1031. [Google Scholar] [CrossRef]
- Barrero, F.; Duran, M.J. Recent Advances in the Design, Modeling, and Control of Multiphase Machines—Part I. IEEE Trans. Ind. Electron. 2016, 63, 449–458. [Google Scholar] [CrossRef]
- Le, Q.D.; Kang, H.-J. Implementation of Fault-Tolerant Control for a Robot Manipulator Based on Synchronous Sliding Mode Control. Appl. Sci. 2020, 10, 2534. [Google Scholar] [CrossRef] [Green Version]
- Halim, A.; Edwards, C.; Chee, P.T. Fault Tolerant Control and Fault Detection and Isolation. In Fault Detection and Fault-Tolerant Control Using Sliding Modes; Advances in Industrial Control; Springer: London, UK, 2011. [Google Scholar]
- Mekri, F.; Ben Elghali, S.; Benbouzid, M.E.H. Fault-Tolerant Control Performance Comparison of Three- and Five-Phase PMSG for Marine Current Turbine Applications. IEEE Trans. Sustain. Energy 2013, 4, 425–433. [Google Scholar] [CrossRef]
- Pham, H.; Bourgeot, J.; and Benbouzid, M. Fault-tolerant finite control set-model predictive control for marine current turbine applications. IET Renew. Power Gener. 2018, 12, 415–421. [Google Scholar] [CrossRef]
- Baudart, F.; Dehez, B.; Matagne, E.; Telteu-Nedelcu, D.; Alexandre, P.; Labrique, F. Torque Control Strategy of Polyphase Permanent-Magnet Synchronous Machines with Minimal Controller Reconfiguration Under Open-Circuit Fault of One Phase. IEEE Trans. Ind. Electron. 2012, 59, 2632–2644. [Google Scholar] [CrossRef]
- Guo, H.; Xu, J.Q. Fault tolerant control with torque limitation based on fault mode for ten-phase permanent magnet synchronous motor. Chin. J. Aeronaut. 2015, 28, 1464–1475. [Google Scholar] [CrossRef] [Green Version]
- Lan, J.L. Asymptotic estimation of state and faults for linear systems with unknown perturbations. Automatica 2020, 118, 108955. [Google Scholar] [CrossRef]
- Ortiz-Torres, G.; Castillo, P.; Sorcia-Vázquez, F.D.J.; Rumbo-Morales, J.Y.; Brizuela-Mendoza, J.A.; Cruz-Soto, J.D.L.; Martínez-García, A.M. Fault Estimation and Fault Tolerant Control Strategies Applied to VTOL Aerial Vehicles with Soft and Aggressive Actuator Faults. IEEE Access 2020, 8, 10649–10661. [Google Scholar] [CrossRef]
- Apte, A.A.; Joshi, V.A.; Walambe, R.A.; Godbole, A.A. Speed Control of PMSM Using Disturbance Observer. IFAC PapersOnLine 2016, 49, 308–313. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, H.; Che, Z.; Wang, Y.; Zeng, C. Extended State Observer-Based Predictive Speed Control for Permanent Magnet Linear Synchronous Motor. Processes 2019, 7, 618. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Li, Y. Active Disturbance Compensation Based Robust Control for Speed Regulation System of Permanent Magnet Synchronous Motor. Appl. Sci. 2020, 10, 709. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.D.; Xia, Y.Q.; Fu, M.Y. Fault estimation and active fault-tolerant control for discrete-time systems in finite-frequency domain. ISA Trans. 2020, 104, 184–191. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S.H. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.; Yang, J.; Li, Q. GPIO-Based Nonlinear Predictive Control for Flux-Weakening Current Control of the IPMSM Servo System. Energies 2020, 13, 1716. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.K.; Yang, J.; Zheng, W.X.; Li, S.H. GPIO-Based Robust Control of Nonlinear Uncertain Systems under Time-Varying Disturbance with Application to DC–DC Converter. IEEE Trans. Circuits Syst. II, Exp. Briefs 2016, 63, 1074–1078. [Google Scholar] [CrossRef]
- Jlassi, I.; Estima, J.O.; El Khil, S.K.; Bellaaj, N.M.; Cardoso, A.J.M. A Robust Observer-Based Method for IGBTs and Current Sensors Fault Diagnosis in Voltage-Source Inverters of PMSM Drives. IEEE Trans. Ind. Appl. 2017, 53, 2894–2905. [Google Scholar] [CrossRef]
- Li, H.; and Ren, Z.Y. A Tidal Resource Evaluation-Based Method for Tidal Current Generation Farm Allocation Considering the Directionality of Tidal Currents. IEEE Trans. Sustain. Energy 2020, 11, 2631–2640. [Google Scholar] [CrossRef]
- Xiong, C.; Guan, T.; Zhou, P.; Xu, H. A Fault-Tolerant FOC Strategy for Five-Phase SPMSM with Minimum Torque Ripples in the Full Torque Operation Range Under Double-Phase Open-Circuit Fault. IEEE Trans. Ind. Electron. 2020, 67, 9059–9072. [Google Scholar] [CrossRef]
- Seck, A.; Moreau, L.; Benkhoris, M.F.; Machmoum, M. Control Strategies of Five-phase PMSG-Rectifier under Two Open phase faults for Current Turbine System. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–6. [Google Scholar]
- Nasiri, M.; Milimonfared, J.; Fathi, S.H. Modeling, analysis and comparison of TSR and OTC methods for MPPT and power smoothing in permanent magnet synchronous generator-based wind turbines. Energy Convers. Manag. 2014, 86, 892–900. [Google Scholar] [CrossRef]
- Kestelyn, X.; Semail, E. A Vectorial Approach for Generation of Optimal Current References for Multiphase Permanent-Magnet Synchronous Machines in Real Time. IEEE Trans. Ind. Electron. 2011, 58, 5057–5065. [Google Scholar] [CrossRef] [Green Version]
- Dieng, A.; Benkhoris, M.F.; le Claire, J.C.; Ait-Ahmed, M. Modeling and Optimal Current Control of Five-Phase PMSG—PWM Rectifier SET Non-Sinusoidal EMF Under Open-Circuit Faults. In Proceedings of the 2019 21st European Conference on Power Electronics and Applications (EPE ‘19 ECCE Europe), Genova, Italy, 3–5 September 2019; pp. 1–9. [Google Scholar]
- Siniscalchi, S.M.; Salerno, V.M. Adaptation to New Microphones Using Artificial Neural Networks with Trainable Activation Functions. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 1959–1965. [Google Scholar] [CrossRef] [PubMed]
- Mohammadpour, A.; Mishra, S.; Parsa, L. Fault-Tolerant Operation of Multiphase Permanent-Magnet Machines Using Iterative Learning Control. IEEE Trans. Emerg. Sel. Topics Power Electron. 2014, 2, 201–211. [Google Scholar] [CrossRef]
- Xiong, C.; Xu, H.; Guan, T.; and Zhou, P. Fault-tolerant FOC for five-phase SPMSM with non-sinusoidal back EMF. IET Electr. Power Appl. 2019, 13, 1734–1742. [Google Scholar] [CrossRef]













| Principal Sub-Machine | Secondary Sub-Machine | Homopolar Sub-Machine |
|---|---|---|
| 1, 9, 11, …, 5 h ± 4 | 3, 7, 13, …, 5 h ± 2 | 5, 15, …, 5 h |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Houari, A.; Machmoum, M.; Benkhoris, M.-F.; Tang, T. An Active FTC Strategy Using Generalized Proportional Integral Observers Applied to Five-Phase PMSG based Tidal Current Energy Conversion Systems. Energies 2020, 13, 6645. https://doi.org/10.3390/en13246645
Liu Z, Houari A, Machmoum M, Benkhoris M-F, Tang T. An Active FTC Strategy Using Generalized Proportional Integral Observers Applied to Five-Phase PMSG based Tidal Current Energy Conversion Systems. Energies. 2020; 13(24):6645. https://doi.org/10.3390/en13246645
Chicago/Turabian StyleLiu, Zhuo, Azeddine Houari, Mohamed Machmoum, Mohamed-Fouad Benkhoris, and Tianhao Tang. 2020. "An Active FTC Strategy Using Generalized Proportional Integral Observers Applied to Five-Phase PMSG based Tidal Current Energy Conversion Systems" Energies 13, no. 24: 6645. https://doi.org/10.3390/en13246645