Reducing Rotor Temperature Rise in Concentrated Winding Motor by Using Magnetic Powder Mixed Resin Ring

Abstract
:1. Introduction
2. Magnetic Composite Ring Motor
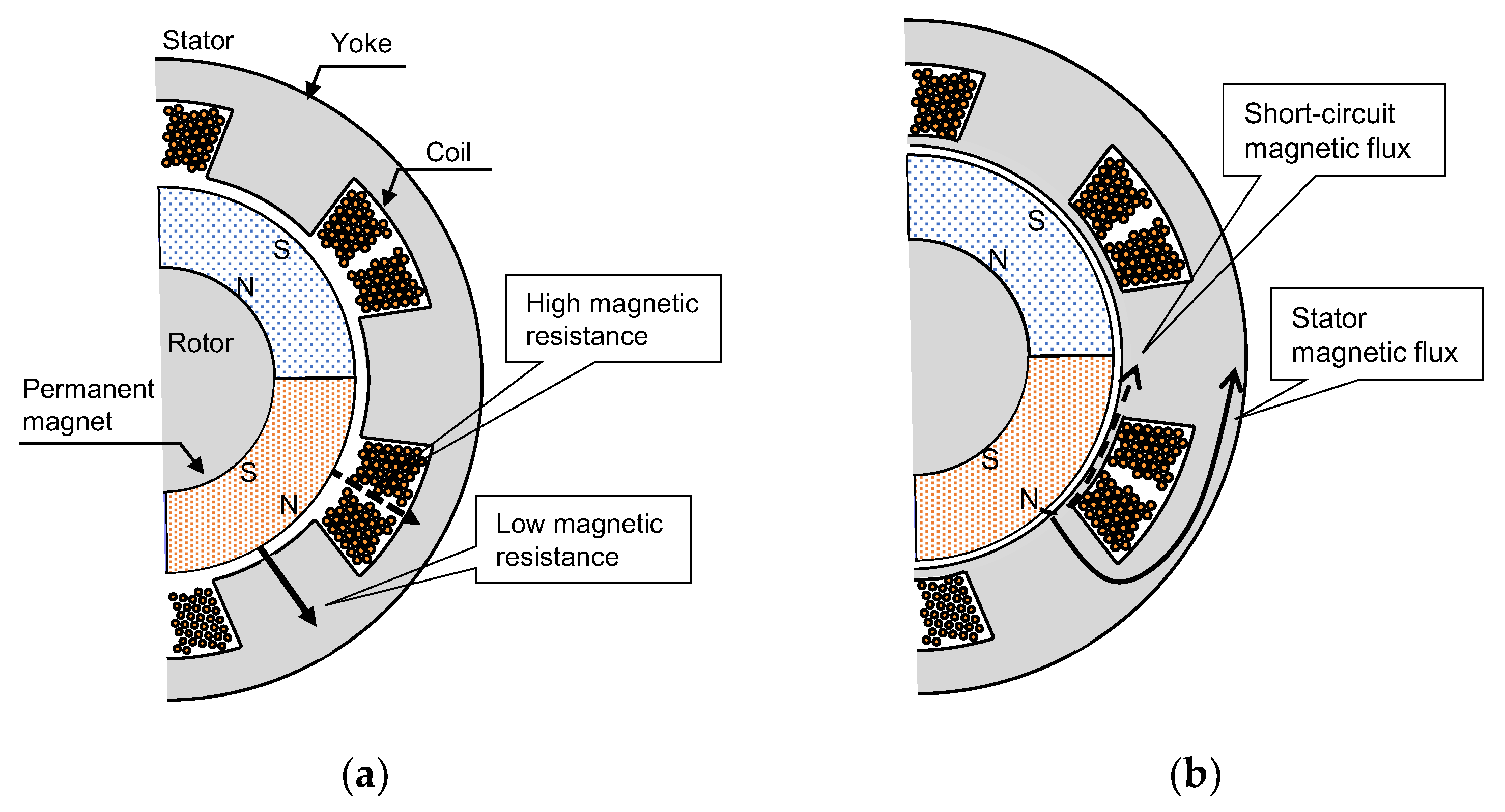
2.1. Magnet Eddy Current Loss
2.2. Structure
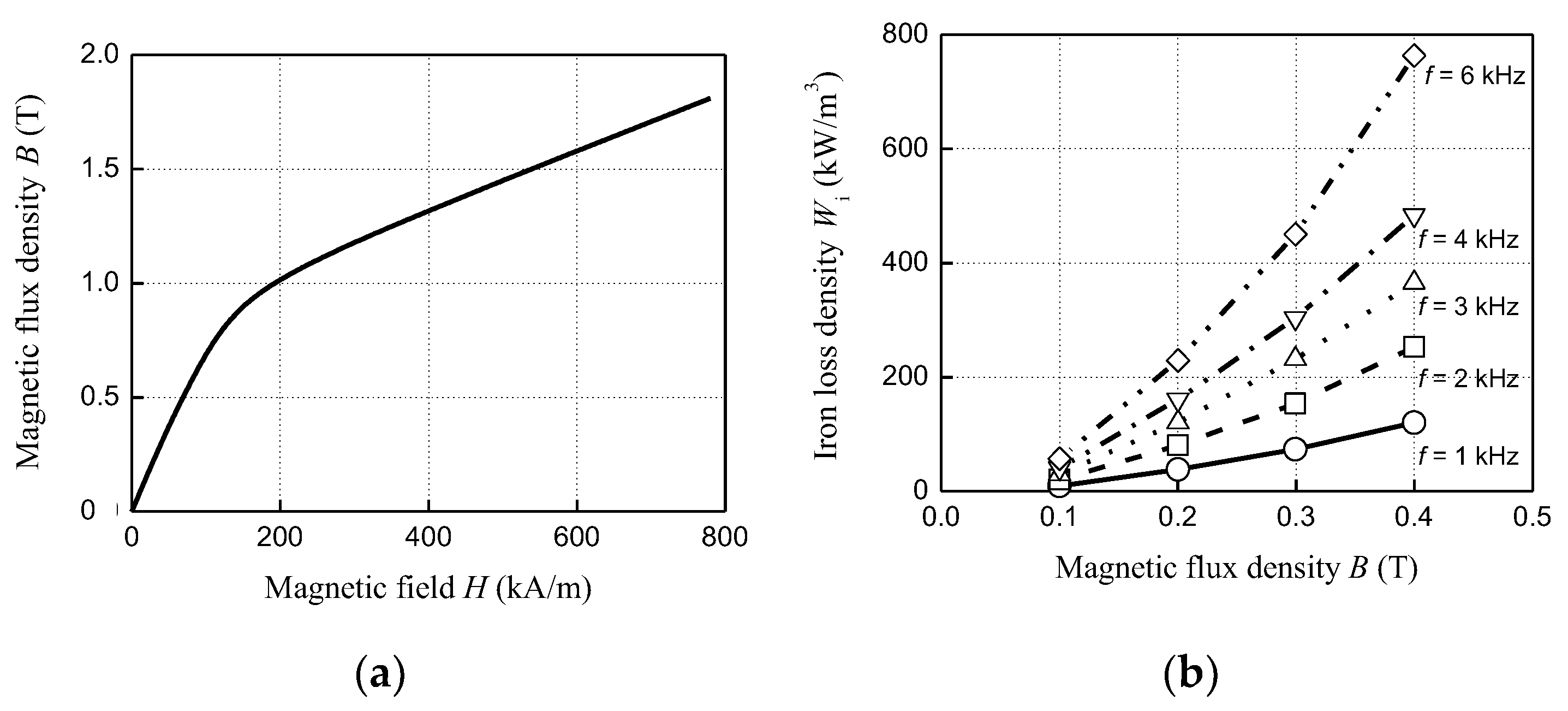
2.3. Magntic Ring Characteristics
3. Effect on Reducing Rotor Temperature Rise
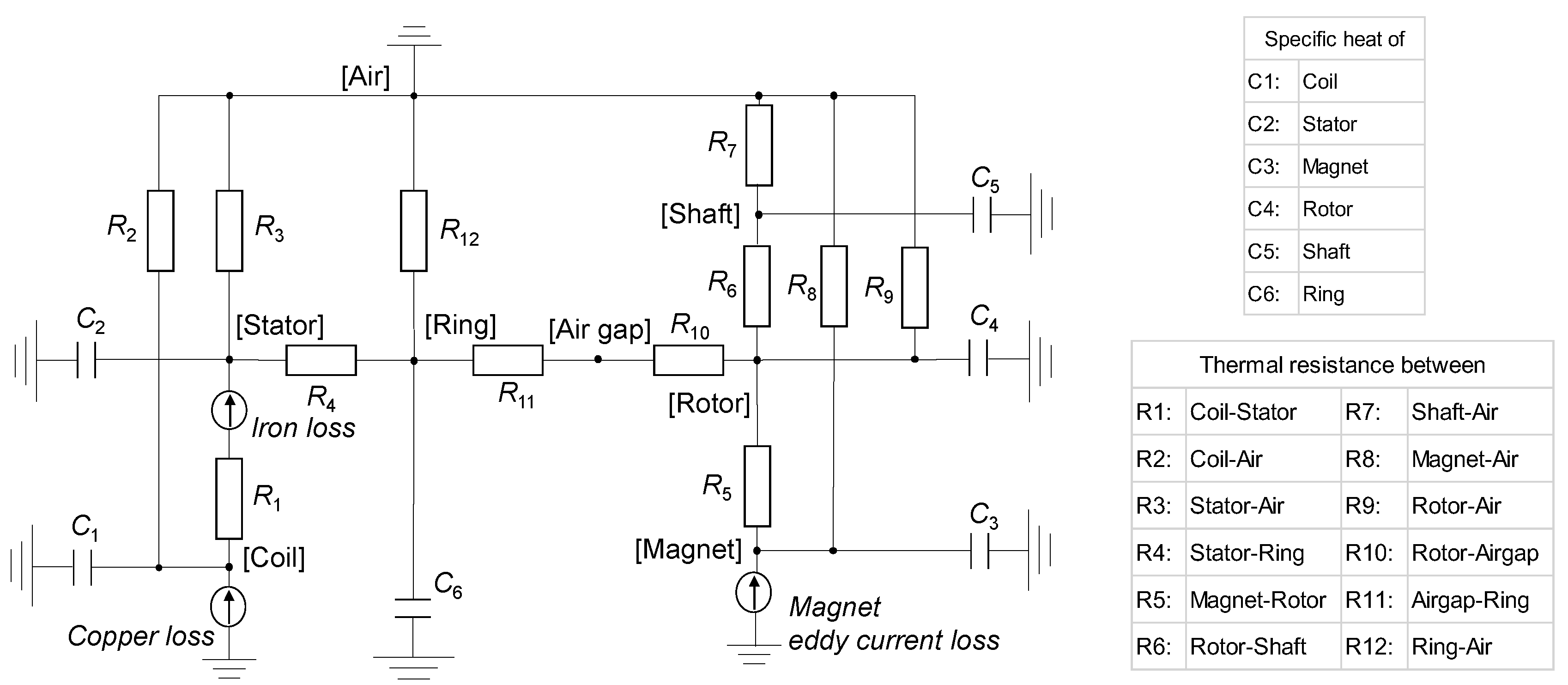
3.1. Simulation Conditions
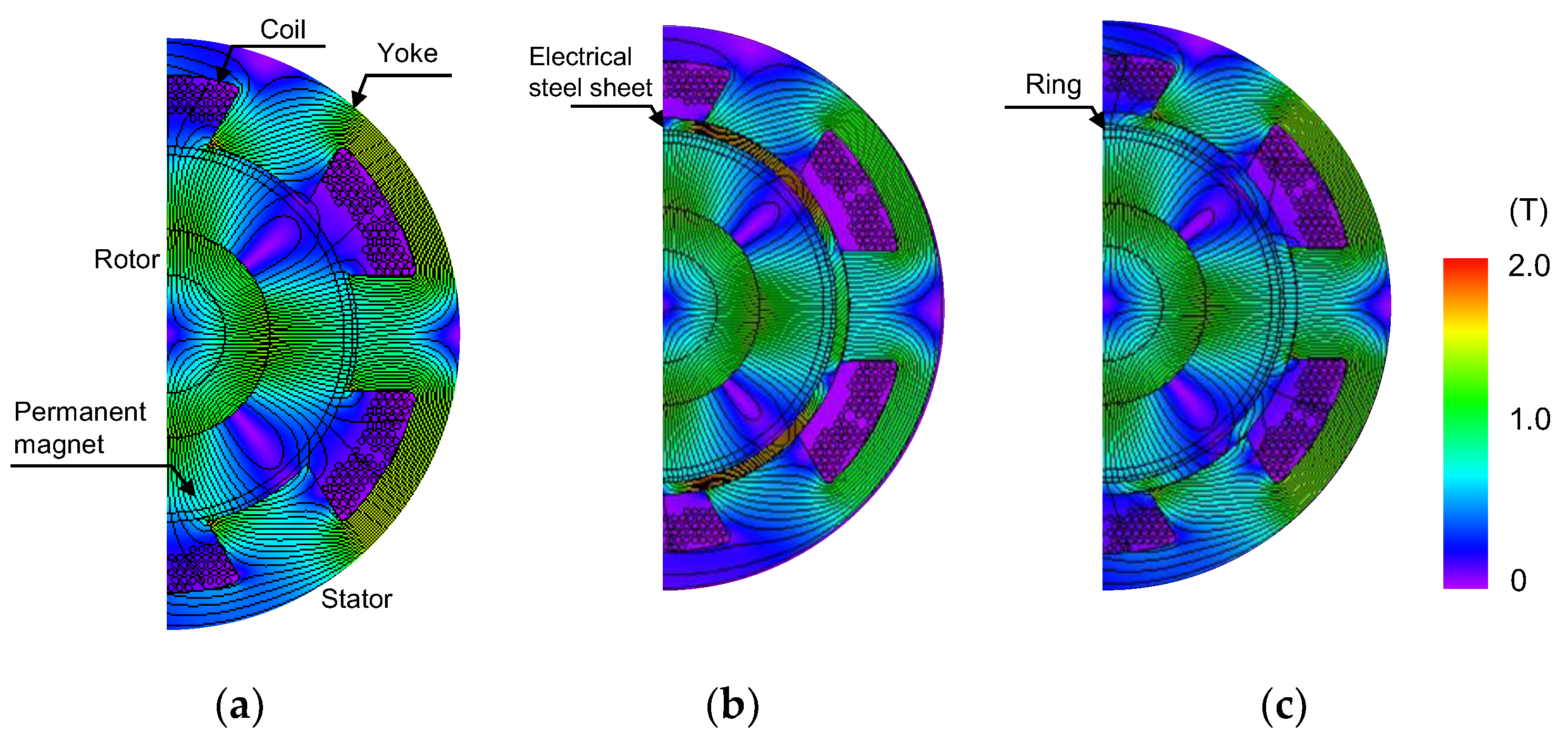
3.2. Loss Analysis Results
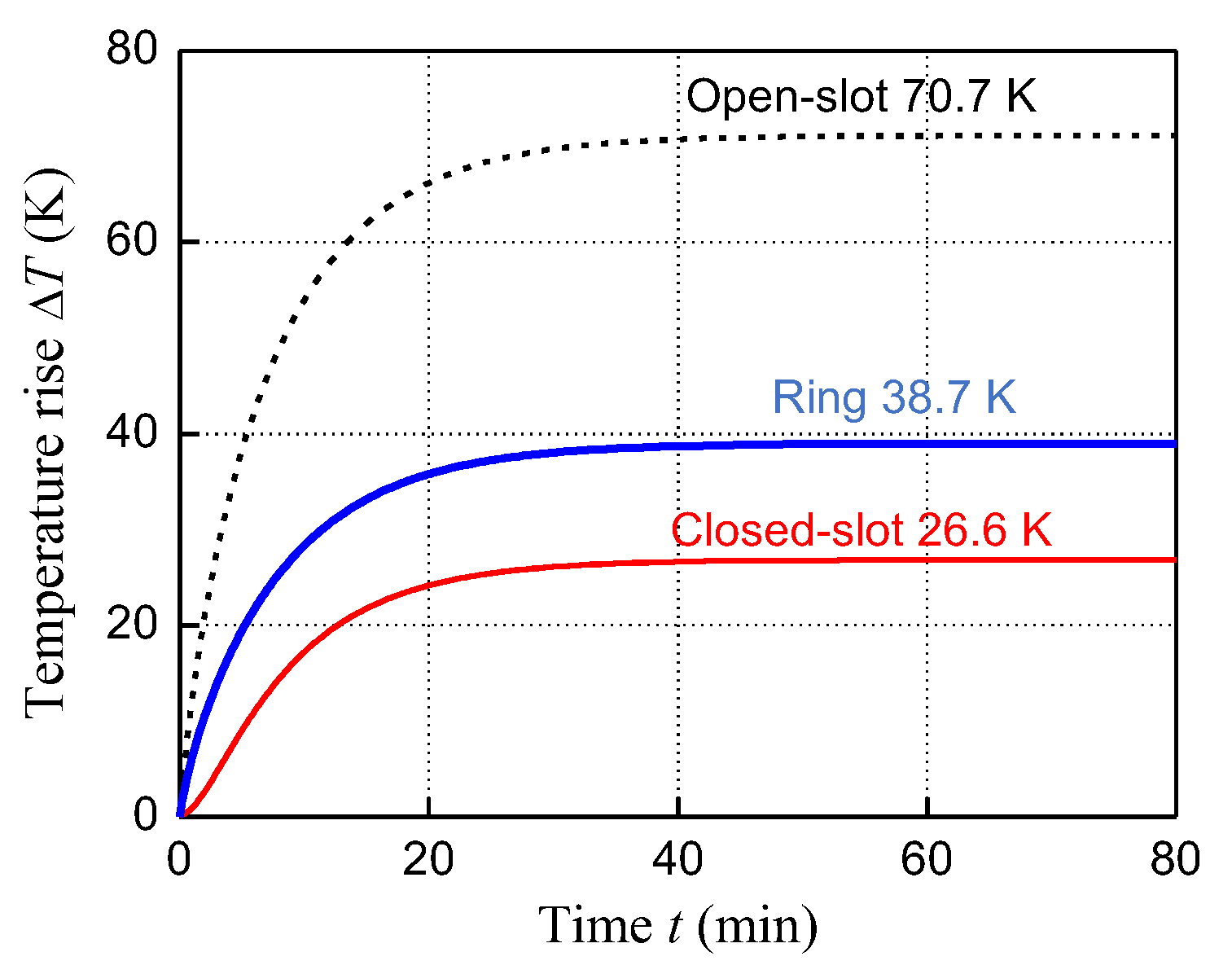
3.3. Temperature Rise Analysis Results
4. Torque Characteristics
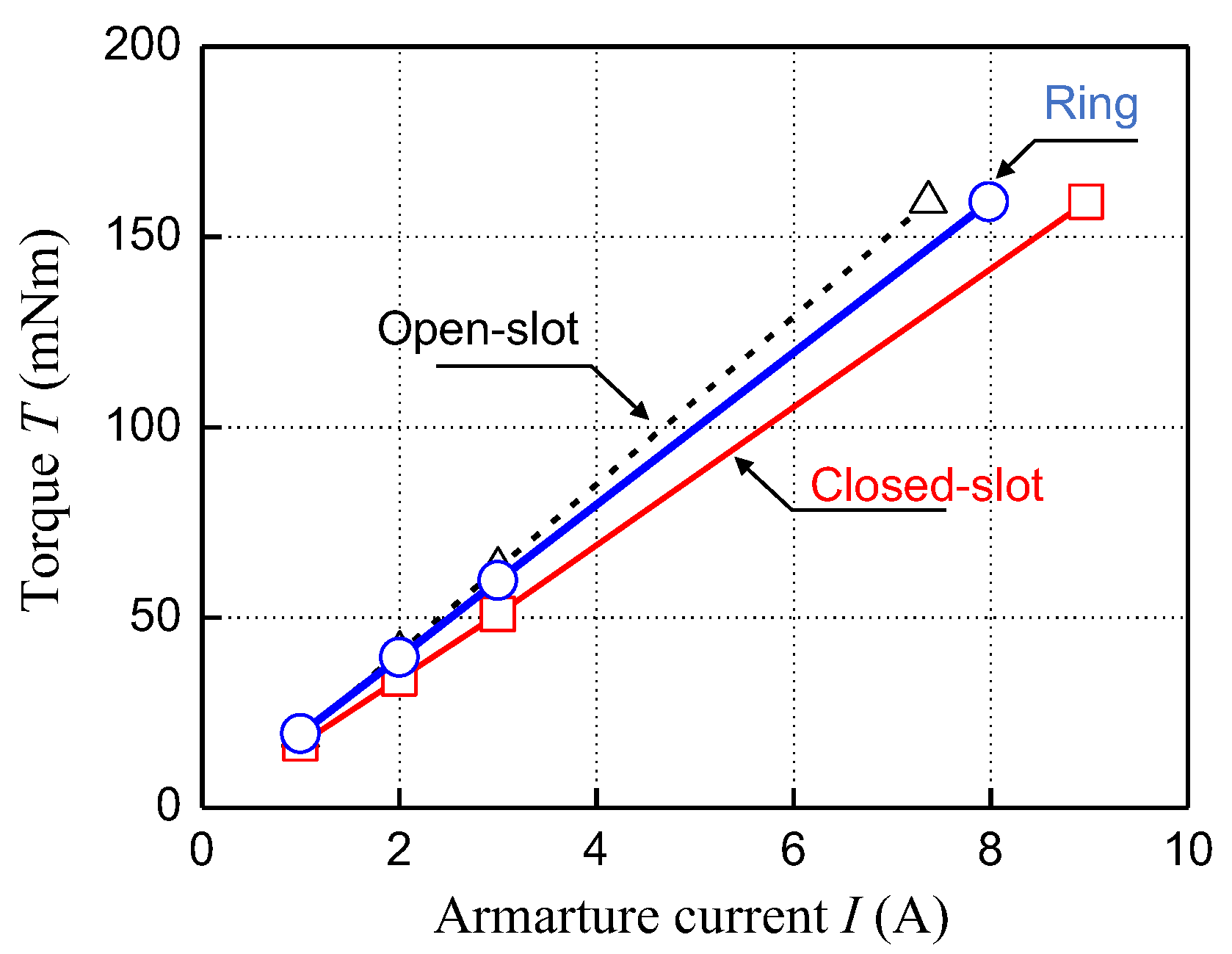
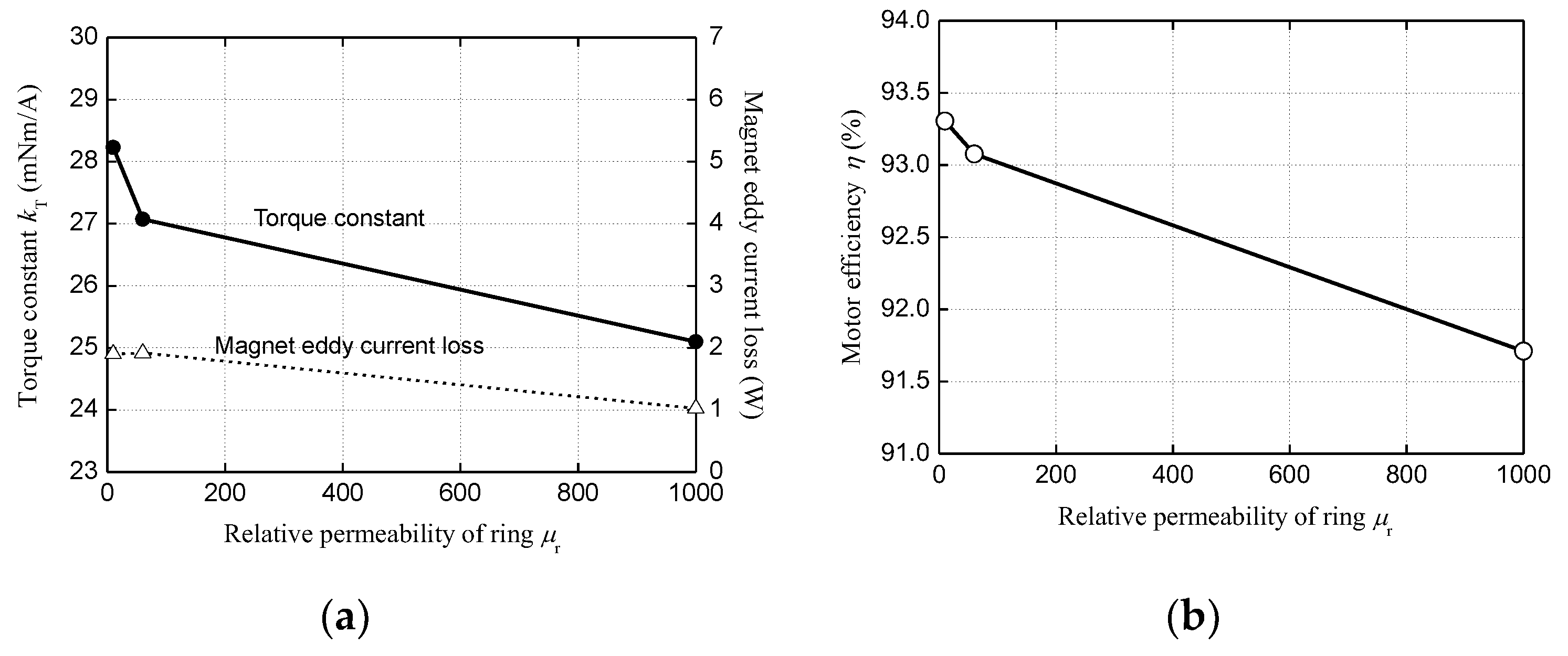
4.1. Torque Characteristics
4.2. Magnteic Circuit
5. Conclusions
- (1)
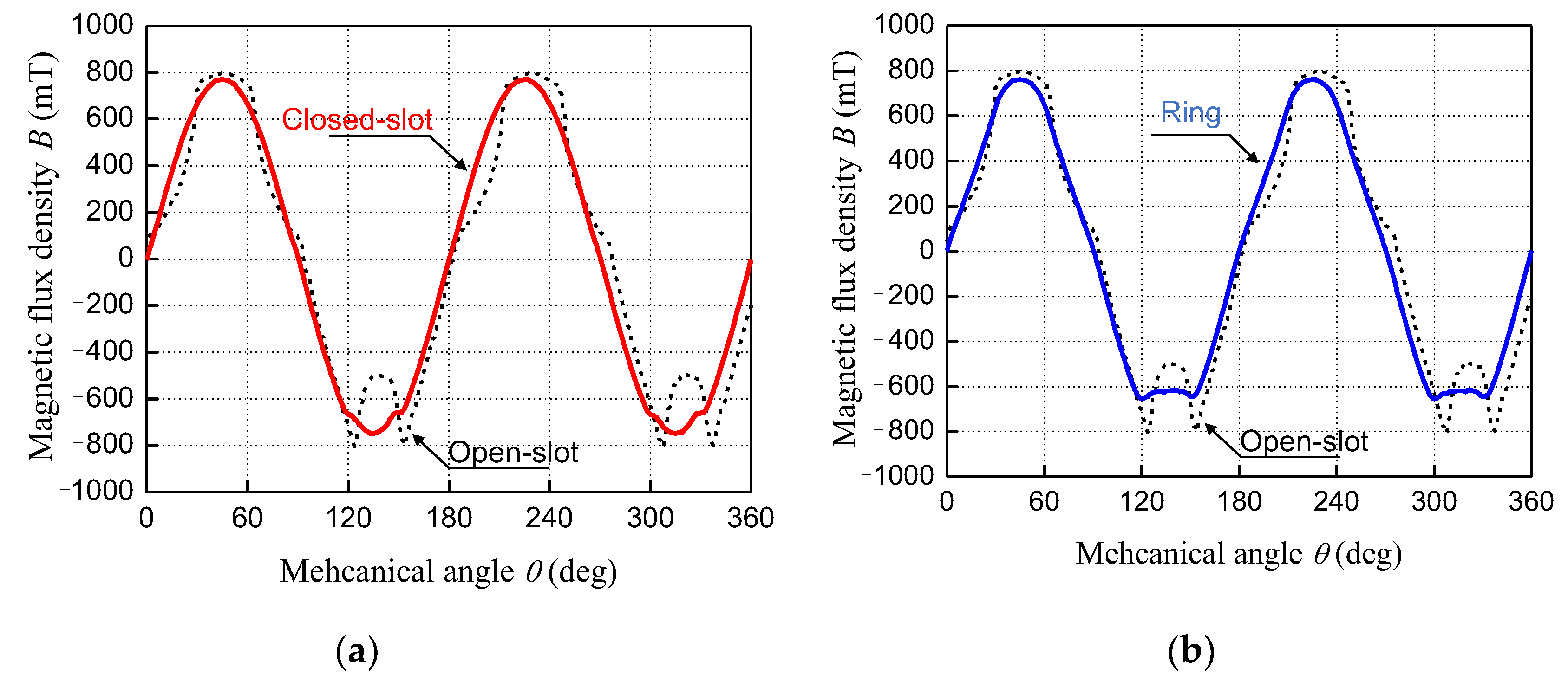
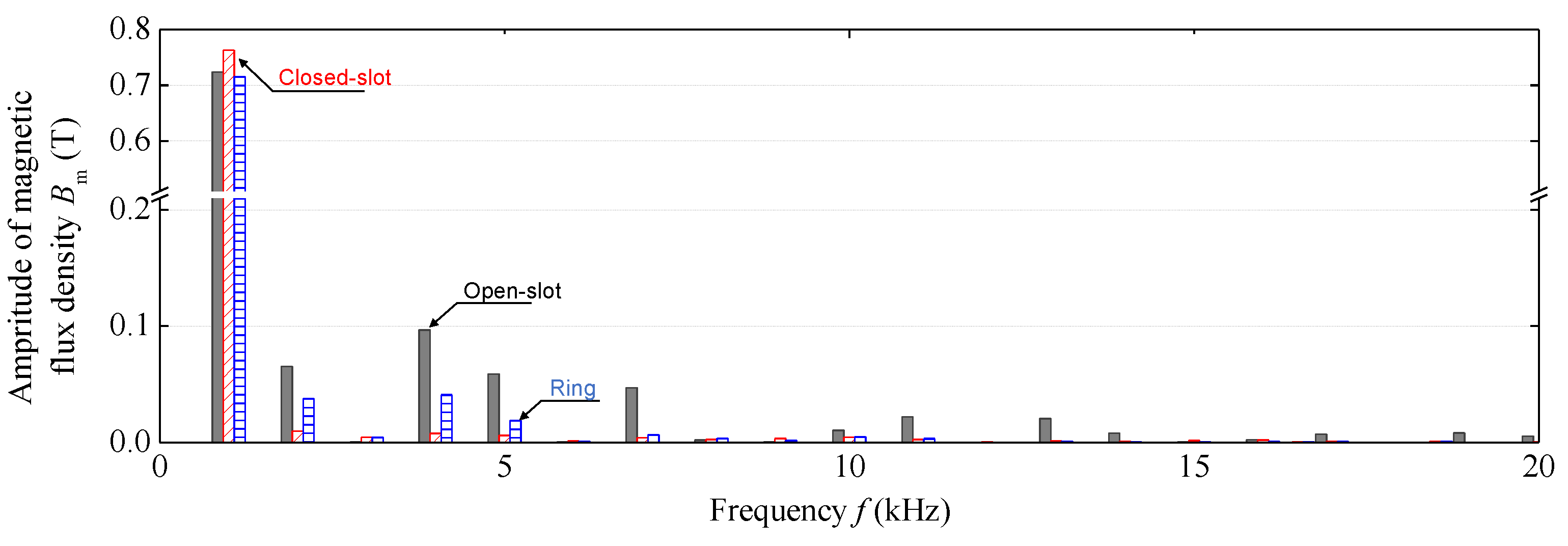
- The fourth, fifth, and seventh harmonic components were reduced by over 50% using a 0.7 mm-thick composite ring.
- (2)
- The magnet eddy current loss for the ring motor was reduced by 78%, and the temperature rise value was reduced by 30 K compared with the open-slot motor.
- (3)
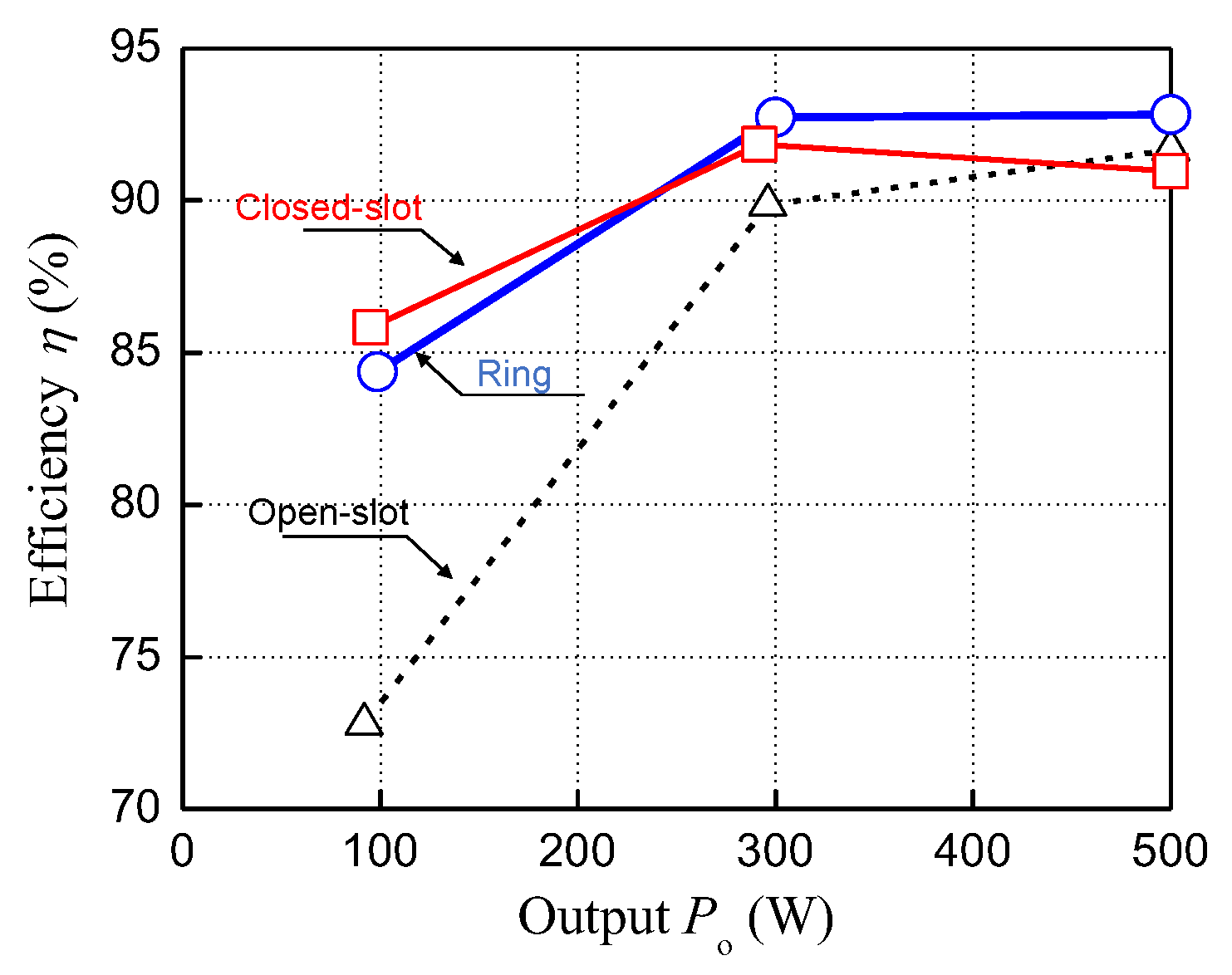
- The efficiency of the ring motor was improved by 1.1% and 1.8% compared with the open-slot and closed-slot motor made of electrical steel sheeting, respectively.
Author Contributions
Funding
Conflicts of Interest
References
- Lee, J.; Jung, D.; Lim, J.; Lee, K.; Lee, J. A study on the synchronous reluctance motor design for high torque by using RSM. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Liu, C.; Shih, P.; Cai, Z.; Yen, S.; Lin, H.; Hsu, Y.; Luo, T.; Lin, S. rotor conductor arrangement designs of high-efficiency direct-on-line synchronous reluctance motors for metal industry applications. IEEE Trans. Ind. Appl. 2020, 56, 4337–4344. [Google Scholar]
- Tabora, J.M.; de Lima Tostes, M.E.; de Matos, E.O.; Soares, T.M.; Bezerra, U.H. Voltage harmonic impacts on electric motors: A comparison between IE2, IE3 and IE4 induction motor classes. Energies 2020, 13, 3333. [Google Scholar] [CrossRef]
- Gómez, J.R.; Quispe, E.C.; Castrillón, R.P.; Viego, P.R. Identification of technoeconomic opportunities with the use of premium efficiency motors as alternative for developing countries. Energies 2020, 13, 5411. [Google Scholar] [CrossRef]
- Son, J.-C.; Kang, Y.-R.; Lim, D.-K. Optimal design of IPMSM for FCEV using novel immune algorithm combined with steepest descent method. Energies 2020, 13, 3395. [Google Scholar] [CrossRef]
- Cui, S.; Zhao, T.; Du, B.; Cheng, Y. Multiphase PMSM with asymmetric windings for electric Drive. Energies 2020, 13, 3765. [Google Scholar] [CrossRef]
- de Pinto, S.; Camocardi, P.; Chatzikomis, C.; Sorniotti, A.; Bottiglione, F.; Mantriota, G.; Perlo, P. On the comparison of 2- and 4-wheel-drive electric vehicle layouts with central motors and single- and 2-speed transmission systems. Energies 2020, 13, 3328. [Google Scholar] [CrossRef]
- Flieh, H.M.; Slininger, T.; Lorenz, R.D.; Totoki, E. Self-sensing via flux injection with rapid servo dynamics including a smooth transition to back-EMF tracking self-sensing. IEEE Trans. Ind. Appl. 2020, 56, 2673–2684. [Google Scholar] [CrossRef]
- Mese, E.; Yasa, Y.; Ertugrul, B.; Sincar, E. Design of a high performance servo motor for low speed high torque application. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 2014–2020. [Google Scholar] [CrossRef]
- Ogata, T.; Maruyama, H.; Fujita, K. A spindle motor servo using a disturbance observer. In Proceedings of the 2009 Digest of Technical Papers International Conference on Consumer Electronics, Las Vegas, NV, USA, 10–14 January 2009; pp. 1–2. [Google Scholar] [CrossRef]
- Liu, N.-W.; Hung, K.-Y.; Yang, S.-C.; Lee, F.-C.; Liu, C.-J. Design of high-speed permanent magnet motor considering rotor radial force and motor losses. Energies 2020, 13, 5872. [Google Scholar] [CrossRef]
- Kim, S.; Kim, Y.; Lee, G.; Hong, J. A novel rotor configuration and experimental verification of interior PM synchronous motor for high-speed applications. IEEE Trans. Magn. 2012, 48, 843–846. [Google Scholar] [CrossRef]
- Wang, X.; Luo, J.; Du, M. Rotor strength analysis of high-speed motor based on magnetic pole eccentricity. AIP Conf. Proc. 2019, 2154, 020008. [Google Scholar] [CrossRef]
- Frosini, L.; Pastura, M. Analysis and design of innovative magnetic wedges for high efficiency permanent magnet synchronous machines. Energies 2020, 13, 255. [Google Scholar] [CrossRef] [Green Version]
- Atallah, K.; Howe, D.; Mellor, P.H.; Stone, D.A. Rotor loss in permanent magnet brushless AC machine. IEEE Trans. Ind. Appl. 2000, 36, 1612–1618. [Google Scholar]
- Jung, J.-W.; Lee, B.-H.; Kim, K.-S.; Kim, S.-I. Interior permanent magnet synchronous motor design for eddy current loss reduction in permanent magnets to prevent irreversible demagnetization. Energies 2020, 13, 5082. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Influence of design parameters on cogging torque in permanent magnet machines. IEEE Trans. Energy Convers. 2000, 15, 407–412. [Google Scholar] [CrossRef] [Green Version]
- Kaimori, H.; Akatsu, K. Behavior Modeling of permanent magnet synchronous motors using flux linkages for coupling with circuit simulation. IEEJ J. Ind. Appl. 2018, 7, 56–63. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Zhang, B.; Liu, A. Cogging torque computation and optimization in dual-stator axial flux permanent magnet machines. IEEJ Trans. Electr. Electron. Eng. 2020, 15, 1414–1422. [Google Scholar] [CrossRef]
- Jo, I.; Lee, H.; Jeong, G.; Ji, W.; Park, C. A study on the reduction of cogging torque for the skew of a magnetic geared synchronous motor. IEEE Trans. Magn. 2019, 55, 1–5. [Google Scholar] [CrossRef]
- Mitsui, Y.; Ahmed, S.; Aoyama, Y.; Koseki, T. Detent force reduction by positional shifting of permanent magnets for a PMLSM without compromising thrust. IEEJ J. Ind. Appl. 2020, 9, 376–383. [Google Scholar]
- Tang, H.; Zhang, M.; Dong, Y.; Li, W.; Li, L. Influence of the opening width of stator semi-closed slot and the dimension of the closed slot on the magnetic field distribution and temperature field of the permanent magnet synchronous motor. IET Electr. Power Appl. 2020, 14, 1642–1652. [Google Scholar] [CrossRef]
- Chun, J.-S.; Jung, H.-K.; Yoon, J.-S. Shape optimization of closed slot type permanent magnet motors for cogging torque reduction using evolution strategy. IEEE Trans. Magn. 1997, 33, 1912–1915. [Google Scholar] [CrossRef]
- Tsunata, R.; Takemoto, M.; Ogasawara, S.; Watanabe, A.; Ueno, T.; Yamada, K. Development and evaluation of an axial gap motor using neodymium bonded magnet. IEEE Trans. Ind. Appl. 2018, 54, 254–262. [Google Scholar] [CrossRef]
- Hosoya, R.; Shimomura, S. Apply to in-wheel machine of permanent magnet vernier machine using NdFeB bonded magnet—Fundamental study. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 2208–2215. [Google Scholar] [CrossRef]
- Shi, W.; Zhou, X. Online estimation method for permanent magnet temperature of high-density permanent magnet synchronous motor. IEEJ Trans. Electr. Electron. Eng. 2020, 15, 751–756. [Google Scholar] [CrossRef]
- Sato, M.; Sugimoto, K.; Kubota, K.; Endo, S.; Mizuno, T. Reducing the alternating current resistance and heat generation in a single-wire coil using a magnetic tape. IEEJ Trans. Electr. Electron. Eng. 2020, 15, 1541–1548. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.; Lu, H.; Lin, Z.; Li, Y. Core loss calculation for soft magnetic composite electrical machines. IEEE Trans. Magn. 2012, 48, 3112–3115. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.G.; Watterson, P.A.; Wu, W. Development of a PM transverse flux motor with soft magnetic composite core. IEEE Trans. Energy Convers. 2006, 21, 426–434. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.; Dorrell, D.G. Design and analysis of a claw pole permanent magnet motor with molded soft magnetic composite core. IEEE Trans. Magn. 2009, 45, 4582–4585. [Google Scholar]
- Enomoto, Y.; Ito, M.; Koharagi, H.; Masaki, R.; Ohiwa, S.; Ishihara, C.; Mita, M. Evaluation of experimental permanent-magnet brushless motor utilizing new magnetic material for stator core teeth. IEEE Trans. Magn. 2005, 41, 4304–4308. [Google Scholar] [CrossRef]
- Shutta, Y.; Ako, Y.; Takahashi, Y.; Fujiwara, K.; Kitao, J.; Yamada, M. Conductivity and AC magnetic loss of Nd–Fe–B sintered magnet. Int. J. Appl. Electromagn. Mech. 2019, 61, S3–S12. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, B.; Zhang, C.; Liu, Y.; Gong, X. Eddy-current loss measurement of permanent magnetic material at different frequency. Int. J. Appl. Electromagn. Mech. 2019, 61, S13–S22. [Google Scholar] [CrossRef]
- Yamazaki, K.; Isoda, Y. Iron loss and magnet eddy current loss analysis of IPM motors with concentrated windings. IEEJ Trans. Ind. Appl. 2008, 128, 678–684. [Google Scholar] [CrossRef]
- Suzuki, T.; Nirei, M.; Yamamoto, T.; Yamanaka, Y.; Goto, T.; Sato, M.; Bu, Y.; Mizuno, T. Reduction of eddy currents in winding by using a magnetic layer on an IPM motor. IEEJ Trans. Electr. Electron. Eng. 2020, 15, 601–606. [Google Scholar] [CrossRef]
- Sato, M.; Nirei, M.; Yanamaka, Y.; Suzuki, T.; Bu, Y.; Mizuno, T. Increasing the efficiency of a drone motor by arranging magnetic sheets to windings. Energy Rep. 2020, 6, 439–446. [Google Scholar] [CrossRef]
- JMAG. Available online: https://www.jmag-international.com/ (accessed on 14 December 2020).
- Yabu, N.; Sugimura, K.; Sonehara, M.; Sato, T. Fabrication and evaluation of composite magnetic core using iron-based amorphous alloy powder with different particle size distributions. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Stator outer diameter Do | 32 mm |
| Stator inner diameter Di | 20.6 mm |
| Shaft diameter Df | 11.2 mm |
| Axial length of motor wm | 40 mm |
| Number of turns N | 10 |
| Gap length tg | 0.7 mm |
| Wire diameter dw | 0.37 mm |
| Stator back yoke thickness tb | 1.9 mm |
| Armature resistance Ra | 102 Ω |
| Item | Value |
|---|---|
| Stator core | 10JNHF600 (JFE Steel Corporation) |
| Magnetic ring | Amorphous2.6µm + V-2000 64 vol.% |
| Permanent magnet | NMX-K35CR |
| Rotor core | 35H230 |
| Item | Value |
|---|---|
| Software | JMAG-Designer (x64) Ver.18.0 |
| Analysis method | Two-dimensional magnetic field analysis |
| Solution | FEM |
| Mesh size | Copper:1/10 or less of the skin depth Ring: Automatic Air: Automatic |
| Number of mesh | 58,938 |
| Mesh type | Slide mesh |
| Mesh nodes number | 29,980 |
| Boundary conditions | Symmetrical boundary |
| Analysis area | Analysis in 10 times the analysis model |
| Rotor Speed | N = 30,000 rpm |
| Output | Po = 500 W |
| Material | Copper: ρ = 1.72 × 10 −8 Ωm, μ’ = 1, μ’’ = 0 Ring: B-H curve and Iron loss profile in Figure 3a,b Air: ρ = ∞ Ωm, µ’ = 1, µ’’ = 0 |
| Item | Value |
|---|---|
| Software | JMAG-Designer (x64) Ver.18.0 |
| Analysis method | Transient thermal analysis |
| Thermal conductivity (W/K·m) | Shaft 46.6, Rotor core 46.6, Permanent magnet 7.6, Coil 400, Stator core 18.9, Magnetic ring 3 Between coil and stator core 0.15 (Thickness 0.3 mm) Between magnet and rotor core 0.027 (Thickness 0.1 mm) |
| Specific heat (J/kg/K) | Coil 380, Stator core 492, Magnetic ring 560 Shaft 467, Rotor core 467, Permanent magnet 430, |
| Heat transfer coefficient (W/ K·m2) | Surface in contact with air 10, Surface in contact with the air gap 340.3 |
| Item | (a) Open-Slot Motor | (b) Closed-Slot Motor | (c) Ring Motor | (d) Bonded Magnet Motor |
|---|---|---|---|---|
| Torque constant (mNm/A) | 30.5 | 25.1 | 28.2 | 8.9 |
| Copper loss (W) | 19.8 | 29.2 | 23.2 | 51.6 |
| Iron loss in the stator (W) | 13.4 | 15.0 | 10.0 | 1.9 |
| Eddy current loss in the permanent magnet (W) | 8.5 | 1.0 | 1.9 | 0.1 |
| Iron loss in the ring (W) | - | - | 0.8 | - |
| Total loss (W) | 41.7 | 45.2 | 35.9 | 53.6 |
| Efficiency (%) | 91.7 | 91.0 | 92.8 | 89.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sato, M.; Takazawa, K.; Horiuchi, M.; Masuda, R.; Yoshida, R.; Nirei, M.; Bu, Y.; Mizuno, T. Reducing Rotor Temperature Rise in Concentrated Winding Motor by Using Magnetic Powder Mixed Resin Ring. Energies 2020, 13, 6721. https://doi.org/10.3390/en13246721
Sato M, Takazawa K, Horiuchi M, Masuda R, Yoshida R, Nirei M, Bu Y, Mizuno T. Reducing Rotor Temperature Rise in Concentrated Winding Motor by Using Magnetic Powder Mixed Resin Ring. Energies. 2020; 13(24):6721. https://doi.org/10.3390/en13246721
Chicago/Turabian StyleSato, Mitsuhide, Keigo Takazawa, Manabu Horiuchi, Ryoken Masuda, Ryo Yoshida, Masami Nirei, Yinggang Bu, and Tsutomu Mizuno. 2020. "Reducing Rotor Temperature Rise in Concentrated Winding Motor by Using Magnetic Powder Mixed Resin Ring" Energies 13, no. 24: 6721. https://doi.org/10.3390/en13246721