1. Introduction
What the authors of this paper consider as a challenge for power system planners is the process of switching from security assessment that is deterministic and independent from the current weather conditions to one utilizing an adaptive stochastic approach. In this paper, a risk-based solution is proposed, in particular one that could allow power system planners to consider the influence of weather conditions on the probability of contingencies.
To date, the most accepted security procedure is based on the N-1 criterion, which when integrated with the security-constrained unit commitment/economic dispatch or security-constrained optimal power flow methods (SC UC/ED or SC OPF, respectively) allows one to ensure that the system parameters remain within safety limits after removing one of its elements. The aforementioned methods are understood as follows:
SC UC results with a list of committed units taking into account all inter-temporal and network constraints, as well as the N-1 security criterion;
SC ED provides operating points for units with respect to those constraints;
SC OPF does not take into account inter-temporal constraints while the network constraints and the N-1 criterion are still included.
However, apart from being deterministic, those methods apply only to steady-state equations and therefore skip the power systems dynamic phenomena related to frequency, voltage and angle stability. On the other hand, the main concept behind the proposed method is that preventive remedial actions are designed in order to reduce the risk associated with phenomena caused by generators trips resulting from contingencies. Here, such reduction is performed using the active power redispatch based on an iterative process including the SC UC/ED tool, which is coupled with risk assessment utilizing an adaptive stochastic approach. Such a methodology of risk assessment was thoroughly described and extended in a former paper by the authors [
1].
The aforementioned iterative coupling was proposed as it is not possible to combine the dynamic simulations with SC UC/ED in one optimization problem without simplifications, e.g., acquiring separate optimization tools handling transient, frequency, and voltage phenomena independently. Hence, the motivation of this paper is to propose an iterative optimization tool as a solution, especially if the SC UC/ED tool is already owned by a TSO. The broader context follows the state-of-the-art review.
1.1. Literature Review
Several interesting approaches to extending the SC UC/ED and SC OPF with constraints based on transient stability assessment (TSA) may be found in the literature, however, they differ with respect to many criteria. First of all the way of incorporating rotor dynamics into the linear optimization problem spans from using trapezoidal rule [
2,
3] or Taylor series expansion [
4] (to convert differential equations into algebraic ones) to involving direct (or direct-temporal) TSA methods like single-machine equivalent (SIME) [
3,
5,
6,
7] or the transient energy function (TEF) [
8,
9,
10,
11]. These methods are used to rank the synchronous machines by their stability margin (or its sensitivity to generation changes) with respect to a considered set of contingencies, however, the critical clearing time (CCT) was used for ranking as well [
12]. Secondly, the procedure of finding the amount of power to be shifted from the least stable generators could be based on the identified energy margins, inertia constants [
11], values of the rotor speed at the fault clearing time [
9] or the power angle trajectory sensitivity [
13,
14,
15]. In most cases, the power shifting was performed in small steps within an iterative procedure. Hence, the final dispatch was obtained after several iterations of adjusting the constraints for OPF, solving it and repeating the transient stability assessment process, until the desired value of the stability margin or the CCT was found. However, more sophisticated approaches to solving the constrained OPF problem were also proposed to find the most stable dispatch—they included particle swarm optimization, genetic algorithms and neural networks [
12,
16]. Lastly, the details of the dynamic models used to perform time-domain simulations (TDS) were found to be of importance. In particular, using dynamic instead of static load models [
6] or 4th order generator models (along with excitation systems and automatic voltage regulator (AVR) models instead of constant voltage behind a transient reactance) [
7] was shown to improve the stability of the resulting dispatch.
1.2. Scope of This Paper
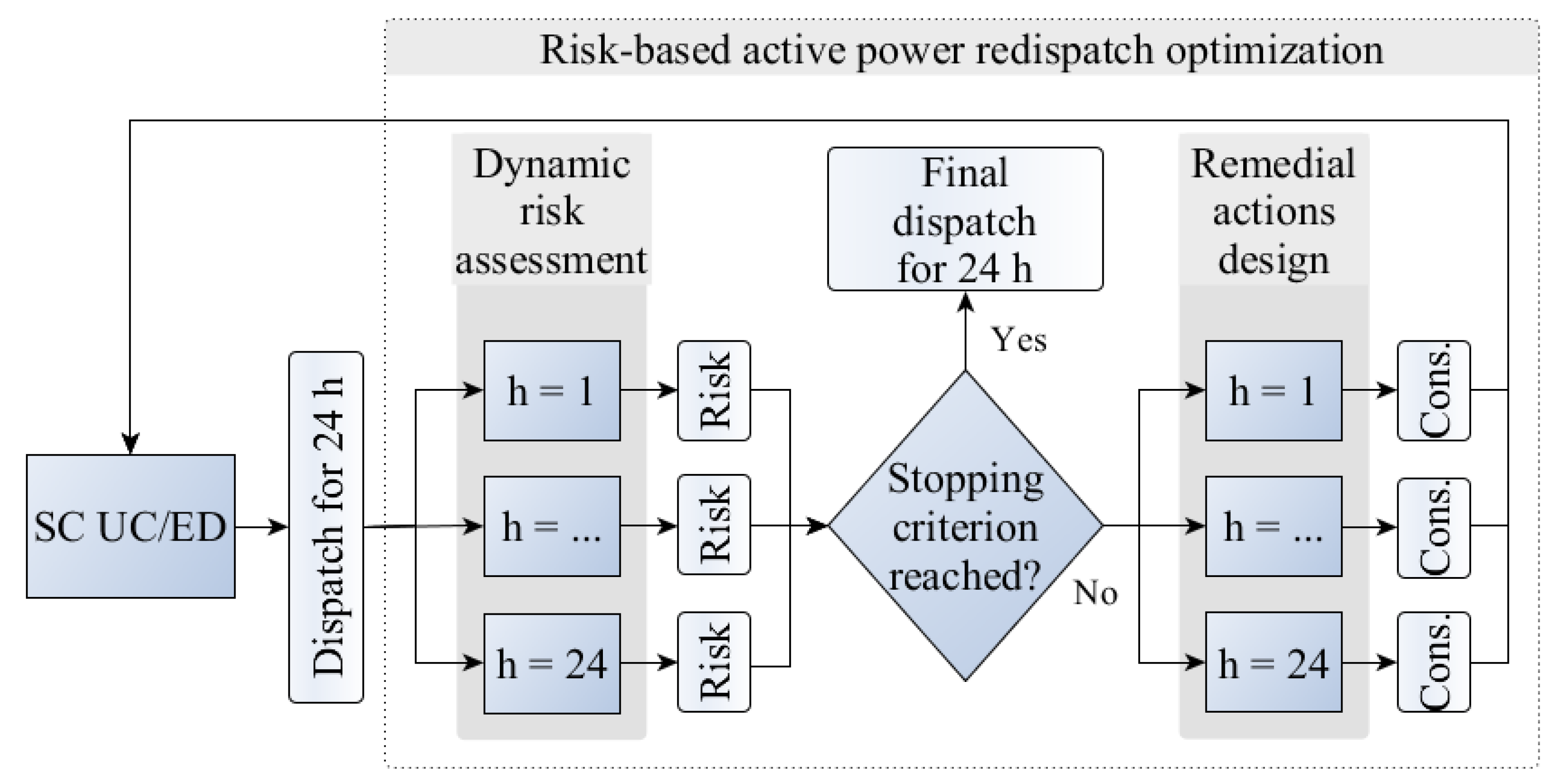
The general scheme of the redispatch optimization proposed in this paper is shown in
Figure 1. Its basic concept is similar to those described above [
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15], but there are three major differences. First of all, going beyond TSA towards a more comprehensive dynamic security assessment is considered here, where not only transient rotor angle but also frequency and voltage instabilities may be tackled—by applying proper dynamic models [
7]. Secondly, the procedure is based on interactions between a standard SC UC/ED tool and the proposed risk-based redispatch optimization, which includes two processes, namely the dynamic risk assessment and the remedial action design (shown as solid gray boxes in
Figure 1). With the SC UC/ED tool considered as providing operating points for 24 h, the dynamic risk assessment results in Risk values assessed for each of them. Afterwards, in case the risk-based stopping criterion is met, the dispatch is considered as final with no more iterations required. Otherwise, the remedial actions are designed within the second process resulting in Cons.—modifications of generators units constraints present in SC UC/ED. Hence, all the SC UC/ED hourly dispatches obtained within the next iterations will satisfy both the risk-based security constraints and the inter-temporal constraints of the units. Considering the above, the proposed method does not replace and does not require any modifications of the SC UC/ED tools already used by TSOs (e.g., for operational planning), but is used only to provide its input. This input is used to adjust the generator unit constraints for the dispatch optimization problem to assure not only static but also dynamic security. Lastly, the proposed risk-based redispatch optimization module uses a stochastic approach to identify remedial actions that are based on the value of the assessed risk (being a function of probability and cost) and aimed to decrease that risk until a specified stopping criterion is reached.
The paper is organized as follows. The methodology of obtaining the risk assessment and remedial actions is described in
Section 2. The results for the IEEE39 power system are presented and discussed in
Section 3. The paper is concluded by summarizing the results and considering further extensions of the proposed method.
3. Results
This section presents the results of adapting the iterative method from
Figure 1 to the IEEE39 power system for the purpose of obtaining dynamically secure operating points, with only one hourly dispatch chosen for simplicity. However, the results were obtained for two scenarios, namely the SC OPF and OPF (in AC versions). The former is more secure as it satisfies the static N-1 criterion, whereas the latter is profitable from both an economical and computational perspective. Moreover, we performed the sensitivity analysis with respect to several values of the iteration step
for both dispatch scenarios. First of all, we extended the IEEE39 model with 10 additional lines which allowed us to improve the systems connectivity and hence reliability. Afterwards, we prepared the values of failure probability for each kilometer of the line basing on the mean time to repair and transmission lines failure frequency [
18,
19] published by PSE—the Polish TSO [
20].
The data describing all 10 generators in IEEE39 are collected in
Table 1, however, the generator from bus 30 is considered as an equivalent of an interconnection with the power supply held constant on the level of 1045 MW. The other 9 generators were modeled as synchronous machines, with
. The variable costs were selected by a simplified matching the types of generators included in the model with the costs expected in Poland.
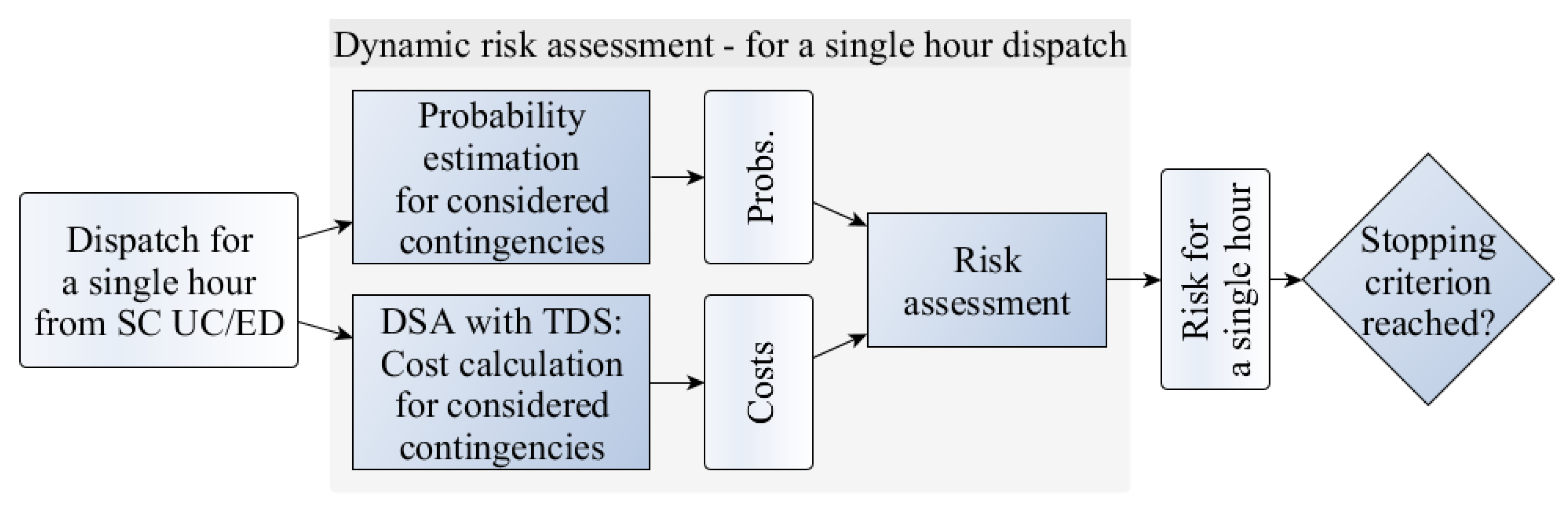
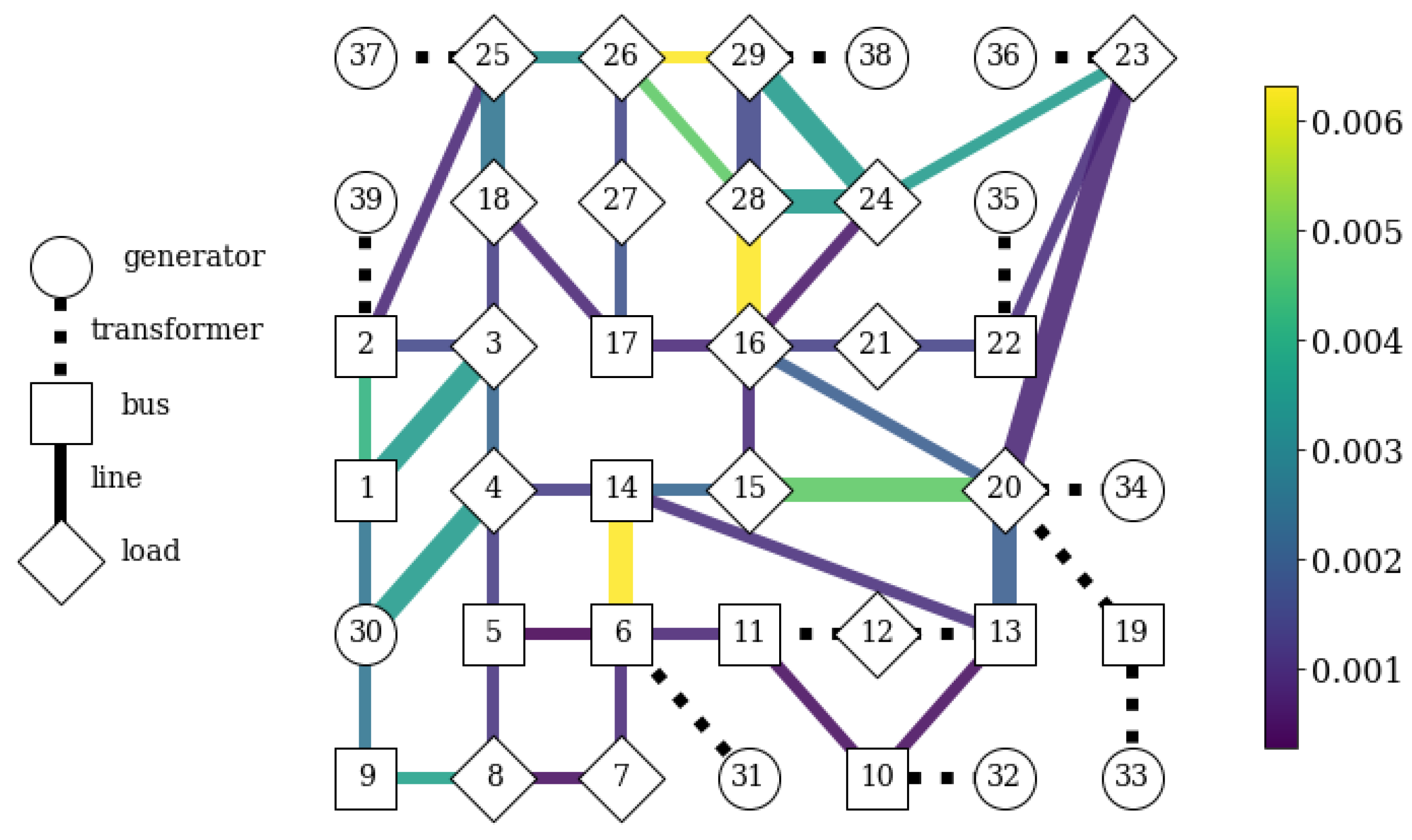
The initial operating points were supplied to the TDS and the process from
Figure 2 was started with the N-1 contingencies simulated as 3-phase short-circuits. They were applied in 44 transmission lines (shown with solid lines in
Figure 4), all of which were equipped with a distance impedance protection relay, which cleared the fault after 150 ms. As we mentioned in
Section 2, the risk was calculated by taking into account the events of tripping the generators by out-of-step protection relays included in the dynamic model. Moreover, the load shed by under-frequency protection relays was also included, which gave us the opportunity of enhancing the assessment of transient rotor angle instabilities by additional assessment of the frequency stability. Furthermore, we equipped our IEEE39 dynamic model with models of overcurrent protection relays, the actions of which could also be responsible for disconnecting bus loads resulting in additional costs. In order to include the actions of all aforementioned protection relays, the TDS were performed until achieving the steady-state.
Reaching the steady-state required leading each TDS until 10 minutes on average, however, such simulations on our HPC (high-performance computing) machine lasted around 1 min. However, as the machine had a server with 128 GB of RAM and 2 Intel Xeon 2.80 GHz processors (20 cores each), it allowed us to perform the TDS of 44 N-1 contingencies in parallel—simultaneously on 22 cores, hence all TDS in one iteration lasted around . The results of a single SC OPF run were obtained in additional and therefore with the final number of iterations given as we may expect the total simulation time in the form .
In the case of the SC UC problem (e.g., including inter-temporal constraints binding the 24 hourly system states) the total time may be obtained similarly as
. In this case, the TDS are still independent and parallelizable—both with respect to contingencies and hourly system states. The value of
is dependent on the algorithm used in the SC UC tool used by the operators, however, with
(which allowed satisfying the stopping criterion from (
3) as shown below for our case), the overall computational performance may be considered as reasonable.
The results of the iterative process for
, showing that the proposed method allowed obtaining the minimal risk value
, are shown in
Figure 5,
Figure 6 and
Figure 7 for both the SC OPF and OPF scenarios.
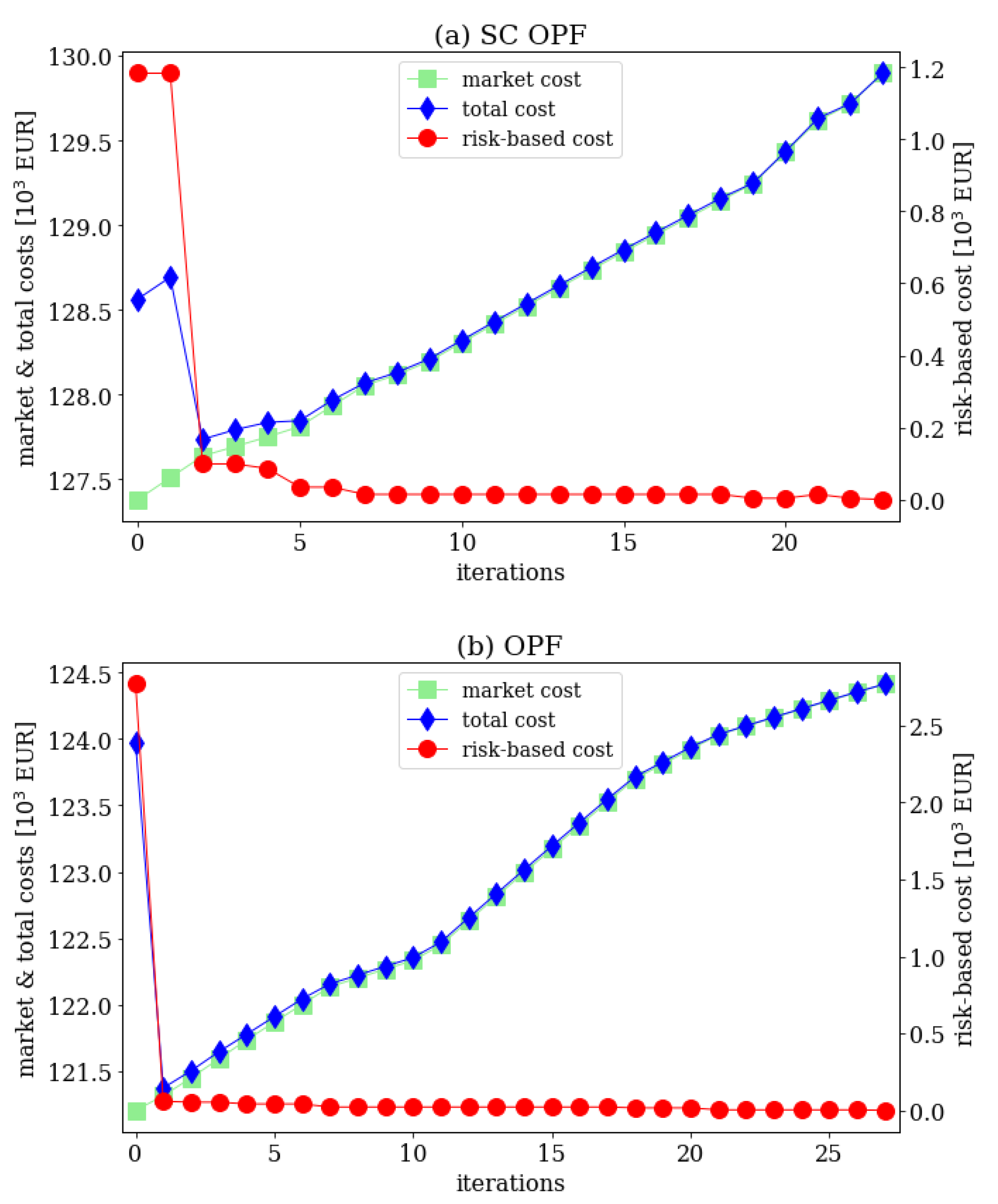
In
Figure 5a,b the evolution of three costs is depicted: the market one describing the cost resulting from the dispatch, the risk-based cost resulting from the dynamic risk assessment (expressing the expected value of the cost incurred by the TSO) and their sum - the total cost. The simulations were carried out until reaching the final stopping criterion given by (
2), although the one defined by (
3) was satisfied after 2 iterations in the SC OPF case and 1 in the OPF one. We can see that in the initial iteration the SC OPF dispatch is characterized by lower risk, which means that it provides not only N-1 static security but indirectly increases also dynamic stability. The reason for this behavior may be found in the fact that SC OPF, with its more restrictive constraints, provides a dispatch with greater values of power margins (see
Table 1 or the initial iteration in
Figure 6). In the case of OPF, the cheaper generators are loaded more heavily (
for 4 of them, with only 2 having this property in the SC OPF case) and as a consequence, they have lower transient stability margin. Furthermore, due to being more stable dynamically, the SC OPF converges quicker to the minimal risk, whereas the OPF, favoring cost-optimization, converges quicker to the minimum total cost.
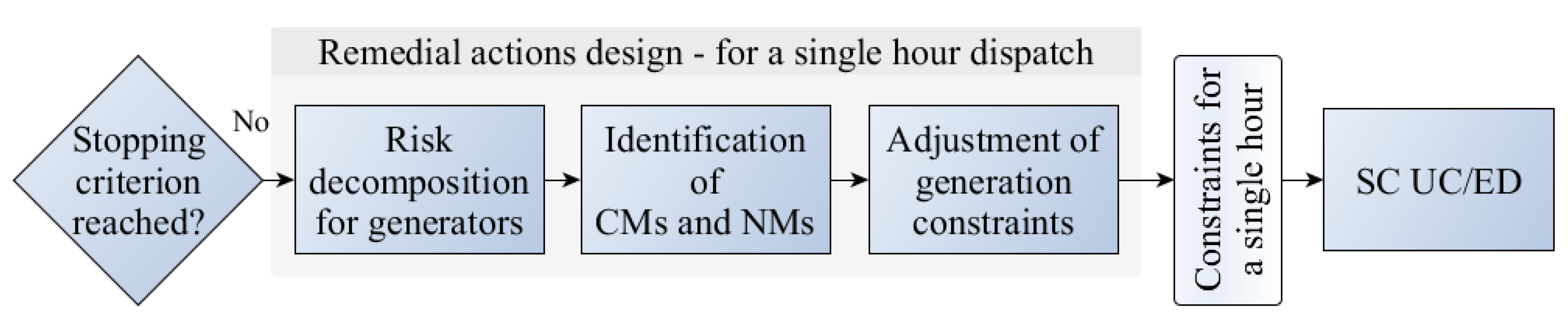
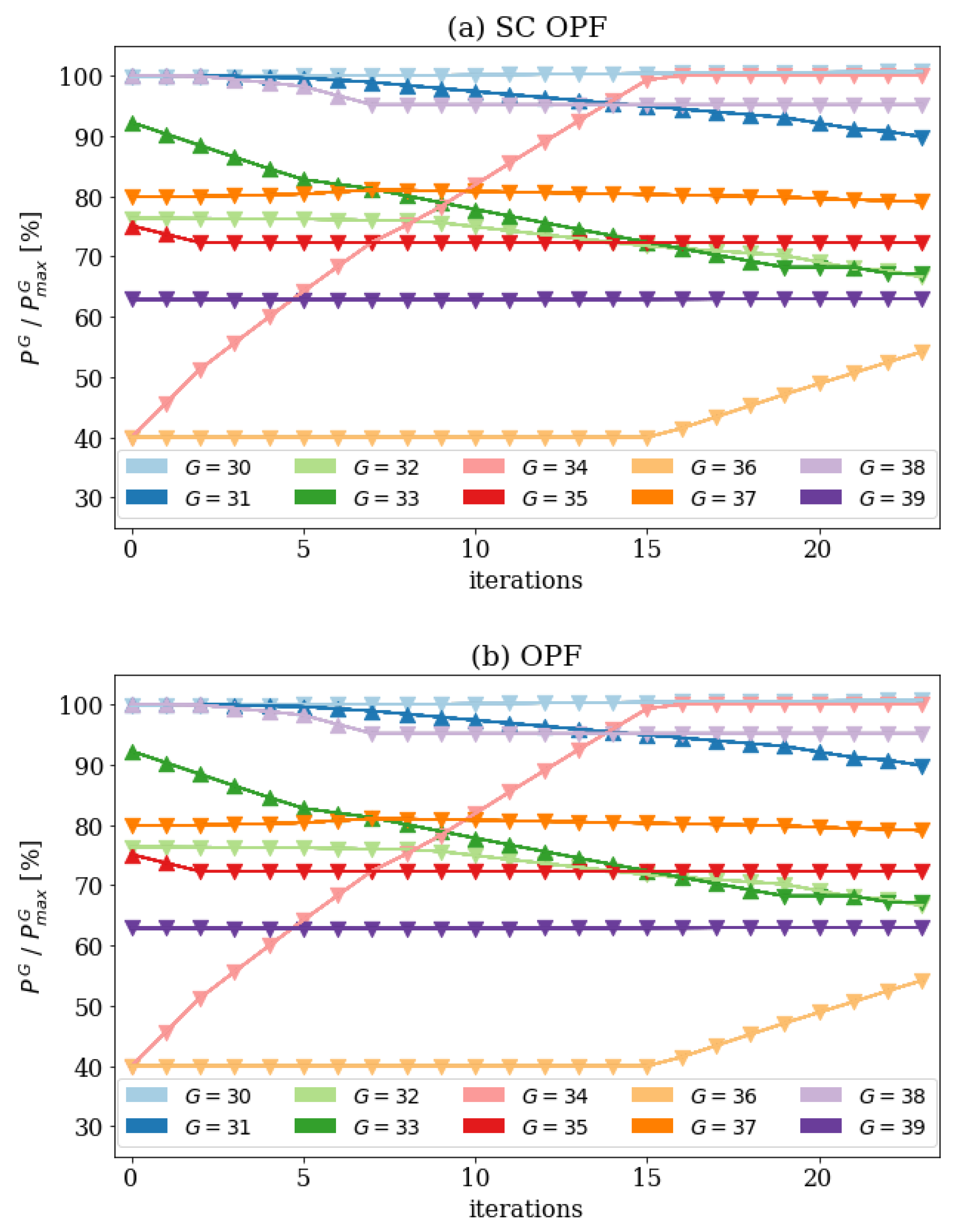
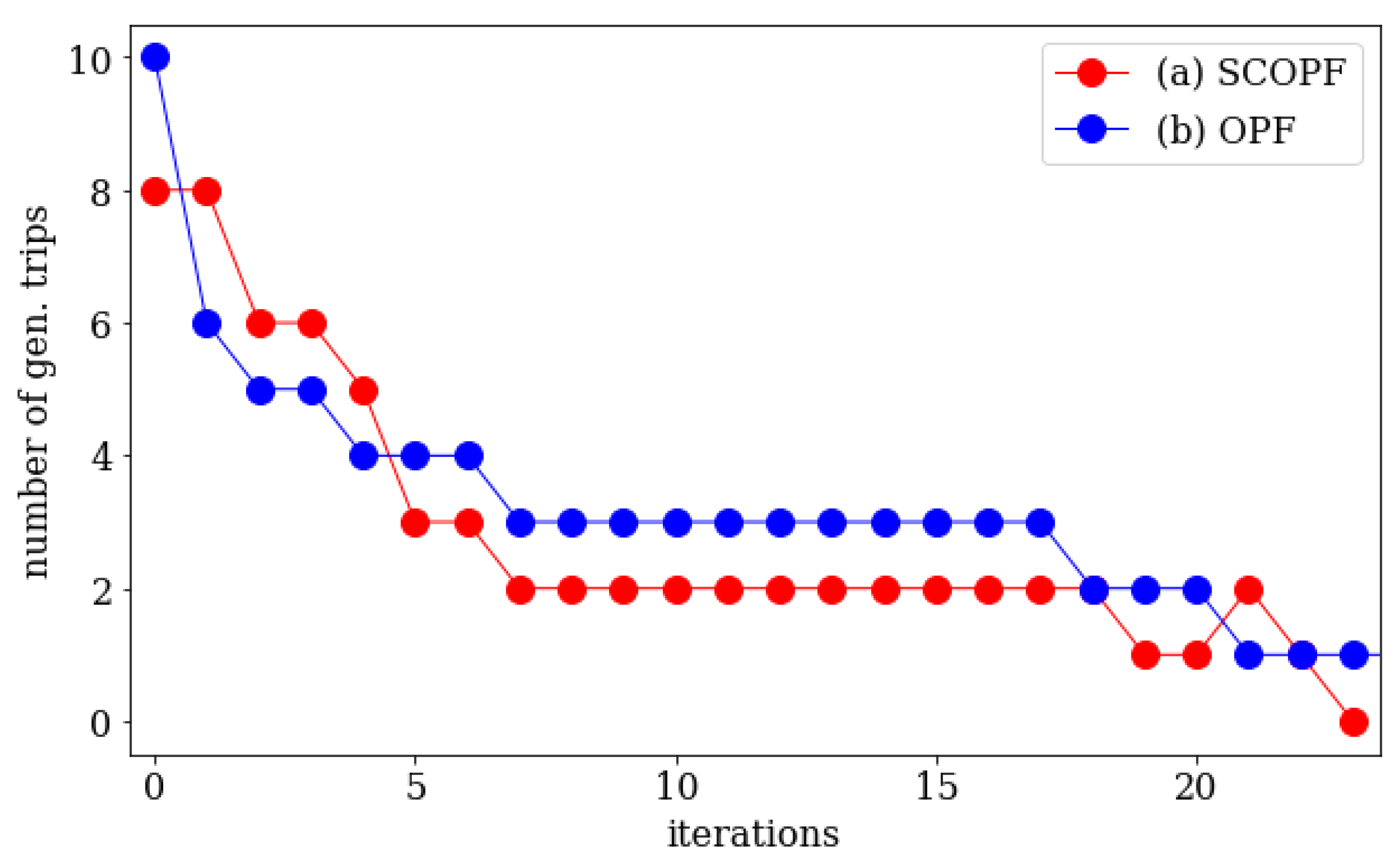
The generation levels in each iteration are depicted in
Figure 6, which also illustrates the identification of CMs and NMs (with upward and downward triangles, respectively). In
Figure 7 the total number of generators tripped in each iteration is shown—in the OPF case this number and the risk (
Figure 5b) decrease monotonically. This is not true for SC OPF (
Figure 5a), due to the change of status from NM to CM by one of the units (Gen. 33 in 21st iteration). However, this is fixed in the following iteration and the whole process converges eventually. Such cases confirm the requirement to perform the power shifting in little steps. The importance of adjusting the
factor, responsible for the power shifted in each iteration is also discussed in
Section 3. Most importantly, the total cost after the final iteration with OPF, which is equal to the market cost of the dispatch characterized by no risk (
), is lower than the initial market cost in SC OPF. The reason behind this effect is that the SC OPF provides a conservative solution allowing the system to withstand N-1 contingencies without corrective actions. On the other hand, dynamic simulations include some corrective actions, e.g., by the primary or secondary control and therefore they are able to relax the initial operating points. What is more, due to the fact that dynamic simulations incorporate also all static stability phenomena, we find that the dynamically extended OPF is more computationally and economically efficient than dynamically extended SC OPF.
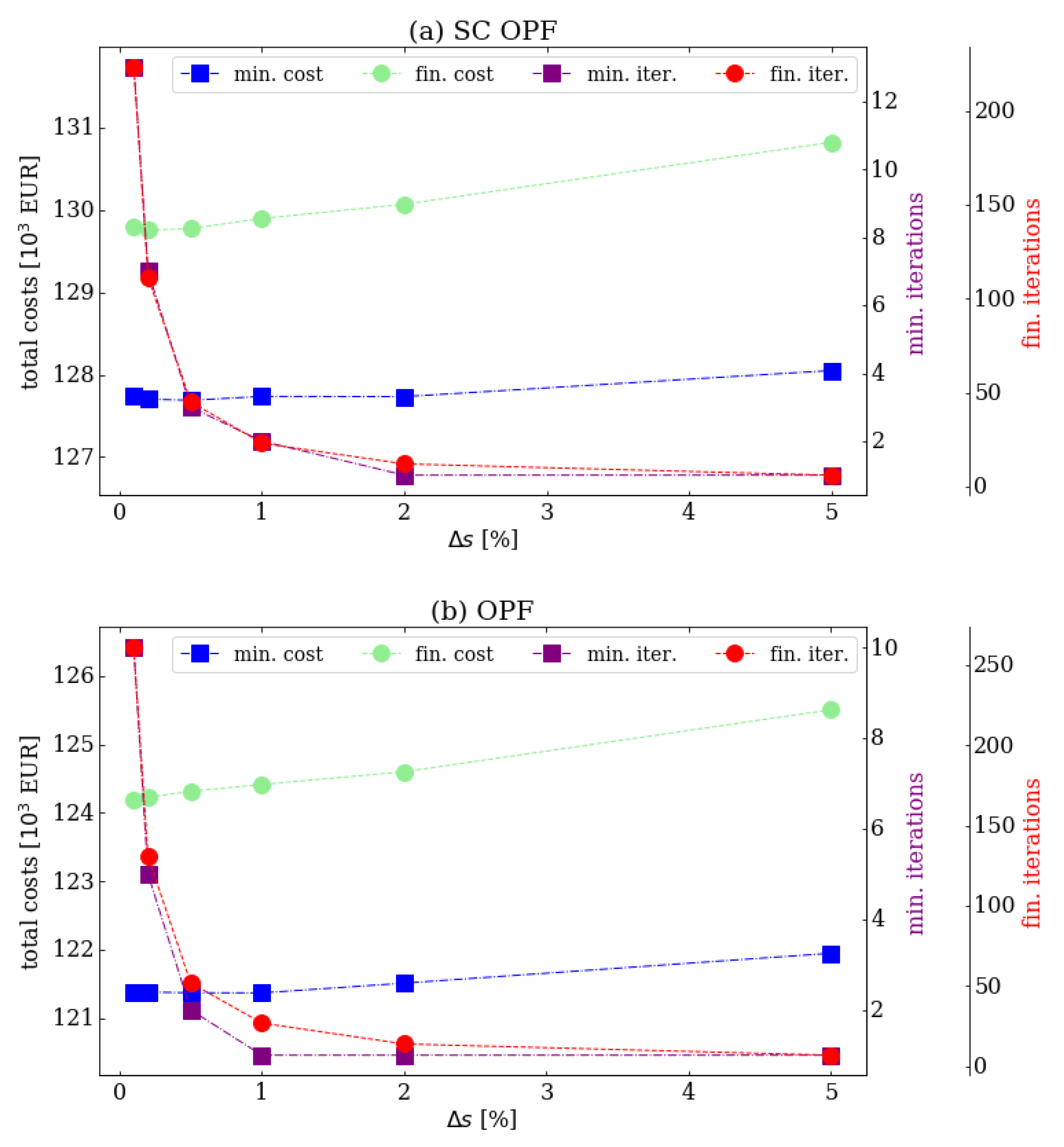
Sensitivity Analysis
The sensitivity analysis of the dynamic risk optimization was applied in order to test the robustness of the proposed method against the amount of power shifted from CMs to NMs in one iteration. For that purpose, we performed the optimization process for SC OPF and OPF scenarios and for the following amounts of the shifted power
. The results of the sensitivity analysis are shown in
Figure 8 for SC OPF and OPF. The common factor for both scenarios is the inverse proportionality of
and the number of iterations as well as the proportionality of
and the total costs. Moreover, those figures also show that decreasing
below a certain level does not necessarily result in lower total costs (both obtained at the minimum and at the final iteration), as they reach a plateau in the range below
. Moreover, although the numbers of iterations taken to reach
are lower in the SC OPF case, the numbers after which the minimum of the total cost (similar to (
3)) were found, are lower in the OPF case. To sum up, the sensitivity analysis shows that at some point reducing
does not alter the risk results. However, it significantly increases the numbers of iterations, making the computations longer and more expensive. Therefore, it could be found that there is a range of
for which it is possible to find a compromise for both, the accuracy and computational costs.
4. Conclusions
This paper proposed the iterative methodology of obtaining preventive remedial actions by extending the SC UC/ED with constraints based on the risk assessed for the power system. Two criteria were used, namely the risk minimization or the total cost minimization. In the latter case, only 2 or even 1 iteration (if SC conditions are relaxed) are required for the modified dynamic IEEE39 system. The method can be successfully used for off-line testing and, if contingency filtering screening techniques are applied, it has also the potential for day-ahead planning. However, the authors expect that with the growing availability and decreasing costs of distributed computing, going beyond day-ahead to intra-day processes will be possible in the future. In the presented test case, we limited the analysis to only one hourly dispatch, which simplified the SC UC/ED (UC/ED) problem to SC OPF (OPF) and made the results easier to interpret and present. However, the same way of reasoning works also for SC UC/ED, where the daily dispatch may be obtained. In such cases the constraints (for generators active power upper limits) are adjusted for each hour independently, still allowing the SC UC/ED tool to deliver a consistent solution for 24 h (satisfying its built-in inter-temporal constraints). The proposed methodology is general as significant flexibility is allowed with respect to the models of generators and protection relays along with the way to include their actions in calculating the costs. Moreover, it allows adapting the current operating points to variable weather conditions, which may be crucial for the accurate reliability analysis of the power system. Finally, the presented approach could be extended with the following:
Utilizing contingency screening methods, like SIME used for the transient stability assessment, for the purpose of filtering the most critical contingencies.
Extending the dynamic model of the power system with under- and overvoltage protection relays to include the costs of load shed due to voltage instabilities.
Adjusting the value of power shifted from critical to non-critical machines from one iteration to another, e.g., basing on the risk reduction.
Integrating the reactive power redispatch into the risk optimization process.
To conclude, the authors believe that the proposed risk-based redispatch optimization, although being heuristic, provides an interesting alternative planning procedure for TSOs in the future, yet allowing them to implement it without changing their current optimization engine. With the fact of being tunable on one hand and the increase of computational efficiency on another, the method may allow one to meet the requirements of future power systems, where the dynamic phenomena will play a significant role.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}