1. Introduction
As part of the international efforts set to counteract global warming, the deployment of renewable energy sources in the electric sector has been considered an energetic priority as a measure to reduce CO
2 emissions. This objective is also reflected in the regulatory energy policies and plans of some countries. For instance, in Germany, the transformation of the electricity sector contemplates achieving a share of electricity generation of 80% from renewable energy by 2050. As part of such transformation, the expansion of renewables and the decommissioning of conventional power plants is regulated by the “Erneuerbare Energien Gesetz” [
1]. The commitment of renewable energy plants has dispatch priority in the power market due to its zero marginal cost for power generation. This affects market auctions and also has some technical implications [
2]. Balancing of the residual load is provided by conventional units, so curtailment of renewable energy resources is the least preferred option for power balancing [
3].
An effect of conventional power plant decommissioning and their replacement with inverter-based renewable power plants is the reduction of system inertia, and consequently the incrementation of the rate of change of frequency (RoCoF) [
4,
5]. The relevance of the inherent synchronous generator inertia is to avoid rapid changes in frequency as load-generation imbalances take place; in this way, enough time is given for the primary power reserve activation to recover the balanced, stable conditions [
6]. In future power systems dominated by non-synchronous generation, it is expected that the inverters will be able to provide ancillary services such as frequency and voltage regulation [
4,
6]. Thus, the future inverters must be capable of replacing synchronous machines, operate in a decentralised mode, and provide inertial and damping responses [
7].
Some ancillary services have been included in the inverter capabilities. The inverter-based generation has been employed to contribute to frequency and voltage regulation. Through the implementation of the virtual synchronous machine concept, inertial and damping capabilities can be added to the inverters [
7,
8]. This allows islanded operation as well as frequency control. Another common technique is the emulation of the power-frequency droop characteristic of the synchronous machine [
5,
9]. This method provides a primary reserve response but lacks an inertial response during transients. Moreover, ramping capabilities of PV plants’ inverters were studied in [
10] for power reserving. Similarly, highly PV penetrated grids and the inverters’ requirements to meet local codes were evaluated in [
11,
12]. Additionally, modified control strategies in the power electronics allow the controller to extract part of the stored kinetic energy in the rotating masses of the wind turbines [
9,
13].
In continental Europe, the frequency range between 49.8 Hz and 50.2 should be maintained by reserves after a power imbalance. The primary reserve of the interconnected system can withstand a power imbalance of 3 GW with a system load of 150 GW [
14]. The reference incident case scenario with a power loss of 3 GW has been found adequate even with a high penetration of renewables [
3,
14]. Nevertheless, there will be still many hours with a positive residual load. The decommissioning of conventional power plants diminishes their capacity to provide balancing power services. At low inertia conditions, the system balance must be complemented with a non-synchronous reserve. Additional to the uncertainty of conventional generation availability in the German power system, it is also not clear whether instantaneous reserve services from abroad will be available and whether transmission capacities will be enough [
3].
The scope of this investigation is to determine the conditions which should be fulfilled by the fleet of inverters connected in a low inertia grid. The required triggering time and power response to avoid under-frequency load shedding (UFLS) are estimated. The over-frequency phenomenon is treated with the same approach as the under-frequency case. The effectiveness of synthetic inertia is also evaluated. In order to assess the influences of the grid size, synchronous response, and model simplifications, two grid cases are employed. The IEEE 9 bus benchmark grid model and an electric power system in the European scale are considered for said purpose; a methodology to determine the inverter requirements to offer frequency support is developed.
2. Methodology
2.1. Frequency Limits and Inertia Constants
When the global security of the system is endangered and under/above frequency is experienced, the load shedding is activated and the system enters an emergency state. If the frequency exceeds the range between 47.5 and 51.5 Hz, a system blackout can hardly be avoided [
14]. Consequently, the system will reach the so-called blackout state and will have to be restored. Before the blackout, the system tries to recover the balance by rejecting a partial load starting at 49 Hz as frequency decreases. On the other hand, curtailment thresholds between 50.2 and 50.5 Hz have been studied by ENTSOE for over-frequency scenarios [
14]. In this research, a deviation of
Hz is used as a threshold before load shedding and curtailment starts. In the case of under-frequency, power is injected in the system, whereas in the over-frequency case, power is extracted from the grid. Hence, to keep frequency within such threshold, the investigated critical time and power response corresponds to the maximum allowed time for fast power reserve activation in both over and under-frequency.
Two terms commonly found in the literature of power system stability will be used in this section:
Inertia constant (H): It has units of seconds (s) and it is the ratio of the stored kinetic energy in the rotating masses of the machine ( in MWs) and its nominal capacity ( in MVA).
Acceleration time constant (Ta): It also has the units of seconds (s), but this is the ratio of double the kinetic energy (MWs) and the generator nominal power output ( in MW). The acceleration time constant is a measure of the system’s robustness against disturbances. It could be interpreted as the required time to remove the kinetic energy from the rotating masses at the rate of the supplied power load. Thus, the higher the time constant, the higher the available kinetic energy. As the share of synchronous generation decreases, this constant decreases proportionally.
With
f as frequency,
as nominal frequency and
as power imbalance, the swing equation can be expressed as follows [
15]:
In this paper, the inertia constant H is used for the description of inertia in wind turbines and single synchronous machine representation, whereas the system acceleration constant is used to express the whole system inertia related to the load in terms of real power.
2.2. Frequency Support from Inverter-Based Generation
In this section, the methodology and considerations for the implementation of inverter-based generation for frequency support are explained.
2.2.1. Synthetic Inertia
Synthetic inertia is one of the techniques that manufacturers and researchers are considering to tackle the low inertia problem in power systems [
16,
17]. Frequency support through synthetic inertia was considered with the following assumptions [
9,
18]:
The power output from synthetic inertia is limited to 10% of the wind turbine nominal power.
Due to mechanical and thermal stresses, the additional power can be delivered only for a maximum time of 10 s.
It is assumed that all wind turbines operate at a nominal power output. The value of 1.5 MW was selected for said purpose.
The maximum allowable amount of kinetic energy to be extracted from the turbines was limited to half of the kinetic energy while the turbine operates at a nominal speed [
19].
A control system is needed so the stored energy in the rotating blades can be extracted from the wind turbine. Equation (
2) is obtained from the expression of power as the derivative of the stored energy. The additional extracted power from the wind turbine through the implementation of Equation (
2) accounts for the synthetic inertia contribution [
19].
Figure 1 represents the implementation of Equation (
2) in MATLAB-Simulink. In the figure, the insertion of a filter at the output of the multiplication block can be seen [
17,
18]. A constant block
adjusts the response in the model. Since Equation (
2) is given per unit, the output is multiplied by a constant
representing the turbine rated power.
where
is the turbine inertia constant and
the rotational speed per unit.
Typical values of inertia constant for wind turbines are not openly available from the manufacturers to the public. The approximate value was calculated with the utilisation of an equation which relates nominal power and inertia constant for wind turbines [
20].
For a wind turbine with a nominal power of 1.5 MW, the value of
H corresponds to 4.37 s. Rated rotational speed of 18 rev/min was considered [
13]. To avoid the wind turbine stalling, a reduction of 5 revs/min is allowed. This change of rotational speed equals a reduction of 3 MWs on kinetic energy out of a total of 6 MWs. The values of the constants considered in the model are summarised in
Table 1.
2.2.2. Inverter-Based Fast Power Reserve
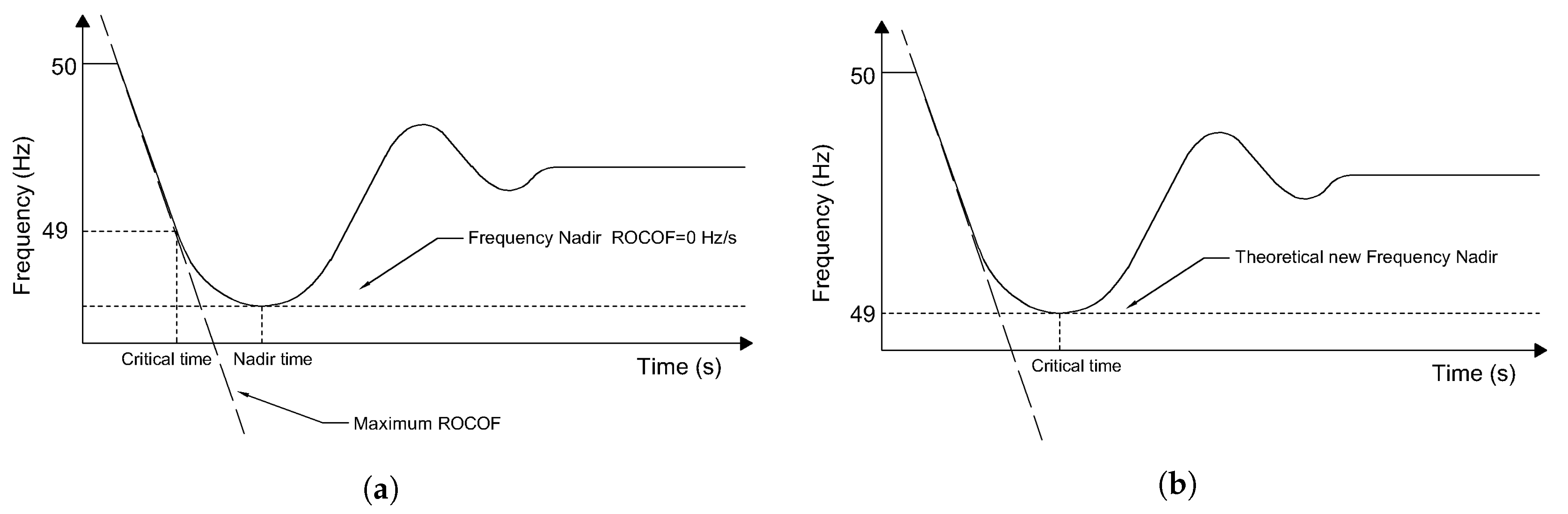
When a power system is subjected to a negative power imbalance and it is assumed that no load is rejected at UFLS frequency, this continues dropping below 49 Hz. The time at which the system frequency equals the UFLS value is then called critical time. This is the maximum available time for the inverter-based reserve to deploy the required power to the system.
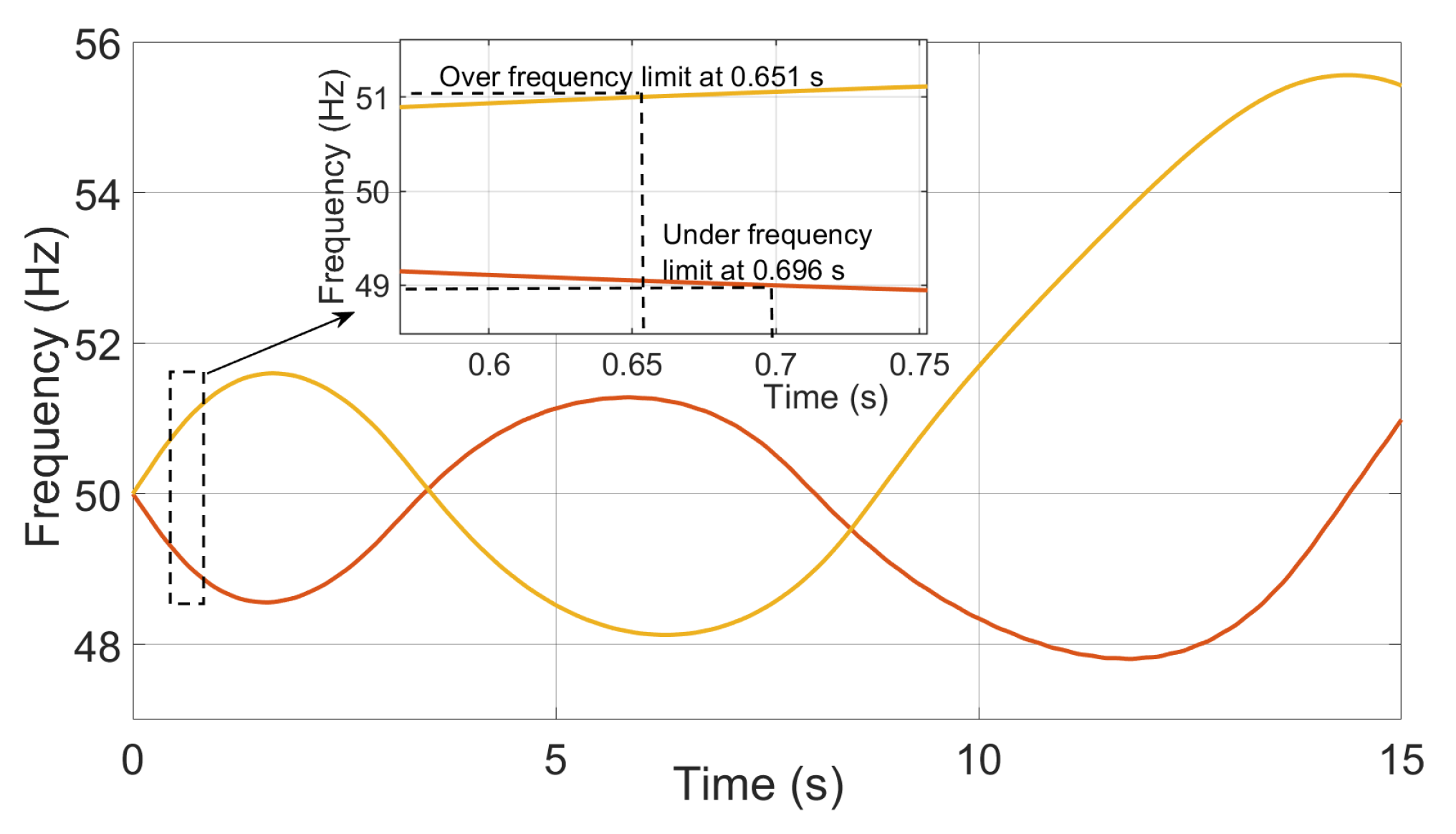
In the critical condition that would lead to load shedding, it is expected from the IBFPR to at least counteract the RoCoF at the critical time, as illustrated in
Figure 2b. Recalling Equation (
1); it is necessary that the machine accelerating power (power imbalance) becomes zero at the critical time.
where
is accelerating power,
is mechanical power,
is electrical power load,
is the critical time, and
is inverter-based fast power reserve.
From the assumption of a linear mechanical power deployment of the synchronous machines governors, the rate of change in mechanical power, after a power imbalance , is given by , where represents the time at which the frequency nadir occurs. Given the power balance at the critical time, , the IBFPR response must be equal to , being equal to .
Substituting
by
and
by
in Equation (
4), the following expression is obtained for the
at time
:
It is assumed that
remains with a constant power output after
long enough to stabilise the system frequency. The result of the previous equation represents the slope of the power output from the inception of the incident until the critical time, which with the implementation of IBFPR will not be critical any longer, but rather the new frequency nadir time.
According to the expression obtained in Equation (
6), it can be realised that the desired power response from the inverters depends exclusively on parameters that cannot be directly measured from the grid. In a real situation, the values of
,
, and
cannot be known in advance; representing these factors is a challenge in the implementation of this ideal power response. Those values are dependent on the grid characteristics, the primary conventional reserve deployment time, and the overall system inertia [
21]. Thus, two main cases are considered for the remaining analysis with the intent of covering a wider range of systems with different characteristics and dimensions.
2.3. Simulation Cases
As presented in the previous section, the values of critical time and frequency nadir depend on the system imbalance and primary reserve deployment time. In spite of assessing the influence of the grid size and the primary reserve characteristics, two main cases are considered. In
Table 2, a summary of the simulated scenarios is provided. In both cases it is assumed that the initial steady frequency is the nominal 50 Hz.
Small scale grid case: The IEEE 9 bus model was selected for carrying out the simulations due to its wide acceptance for power system studies and its relatively simple architecture [
22,
23]. The synchronous reserve deployment is in the order of a few seconds due to governor response [
15,
24]. In order to assess the typical simplifications made in power system analysis, two approaches of these cases were developed:
- −
Scenario A—simplified model: The power system is represented by an equivalent single machine model in which the losses are neglected. In this case, typical governor data is considered [
25]. With this model, the critical time and power response are determined. Furthermore, the impact of synthetic inertia is analysed.
- −
Scenario B—extended model: All the power system components and their dynamic characteristics are considered in the IEEE 9 bus model for critical time and IBFPR estimation [
22].
Large scale grid case: The European grid-scale, in which all the synchronous machines are modelled and simplified as one single machine providing the characteristic expected from the overall system. The synchronous primary reserve deployment is in the order of
s [
14,
26]. The frequency response is assumed to be the same as the European response analysed by ENTSOE [
14]. Similarly, as in the simplified model of the IEEE benchmark, the influence of synthetic inertia and IBFPR is evaluated.
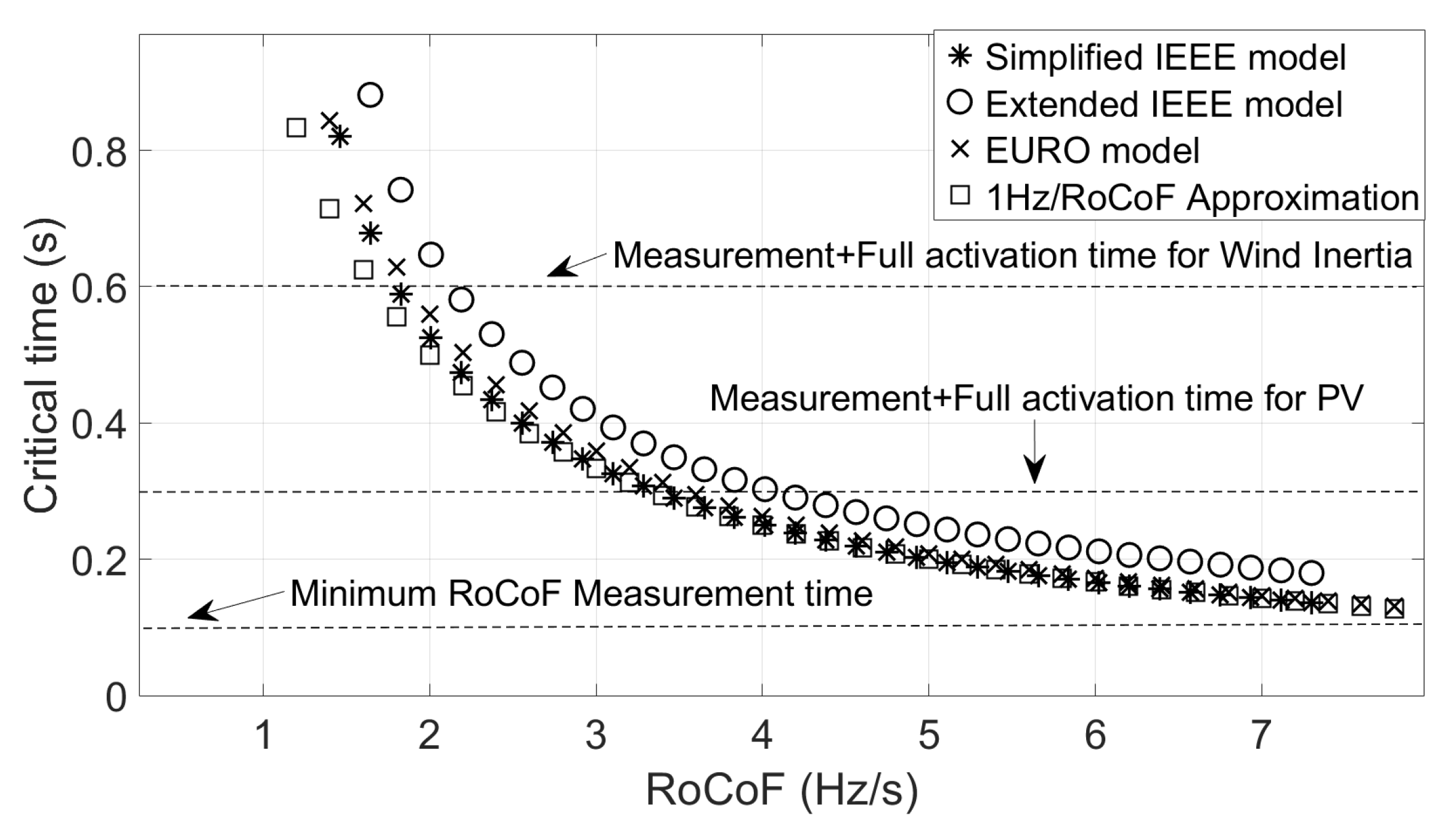
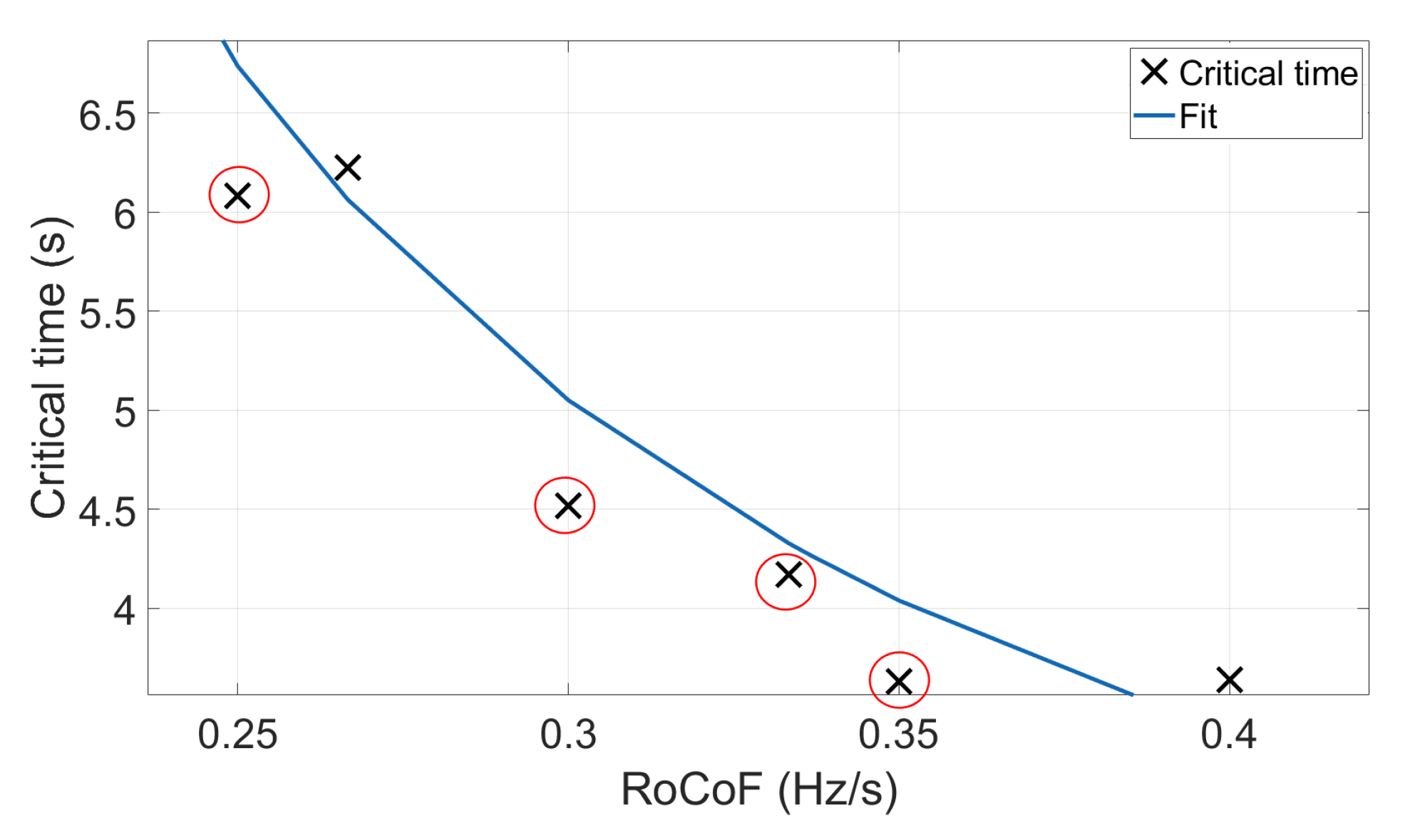
Therefore, with the selected cases, the critical and nadir times are estimated through the simulations of different scenarios combining a range of imbalances and shares of non-synchronous generation. In order to assess Equation (
6), a fit of the critical time as function of RoCoF is carried out. With the corresponding fitting function for each case, Equation (
6) can be easily applied assuming that the system inertia is known and power imbalance can be calculated as:
2.4. Simplified IEEE 9 Bus Model
As a first step to evaluating the impacts of inverter-based generation and power imbalances in the grid, the whole system is simplified as one single generating unit. All the losses in the system (transformers, transmission lines, and generators) are neglected with the assumption that the prime mover output is the same as the electrical power output at the generator terminals.
Table 3 provides a summary of the elements comprising the base model.
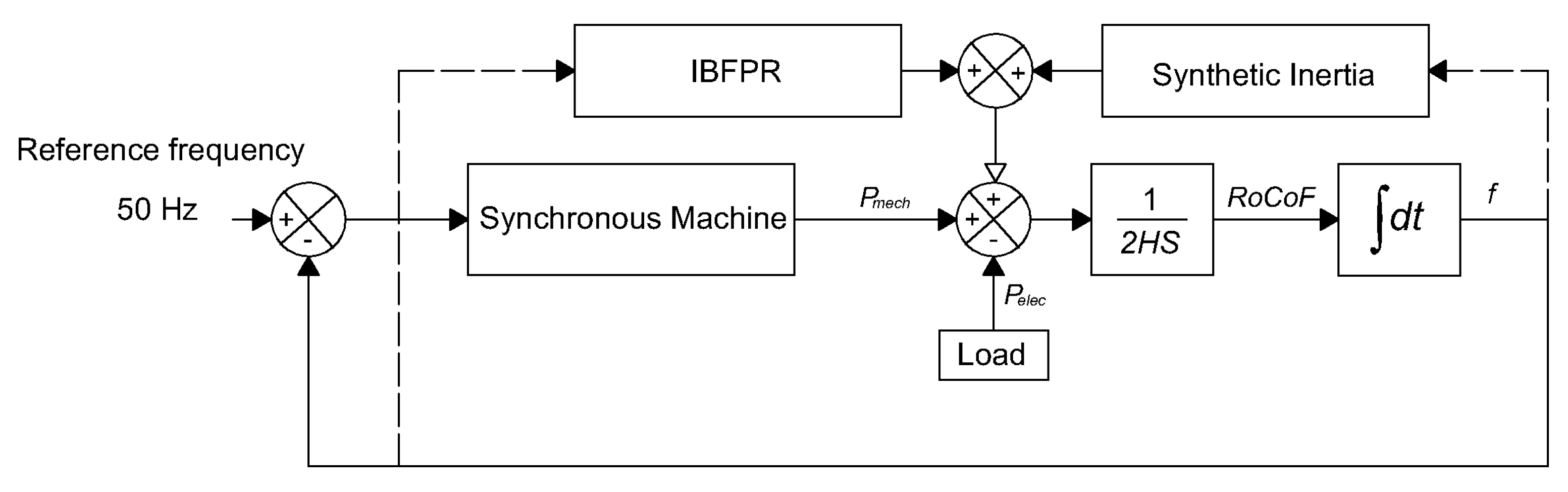
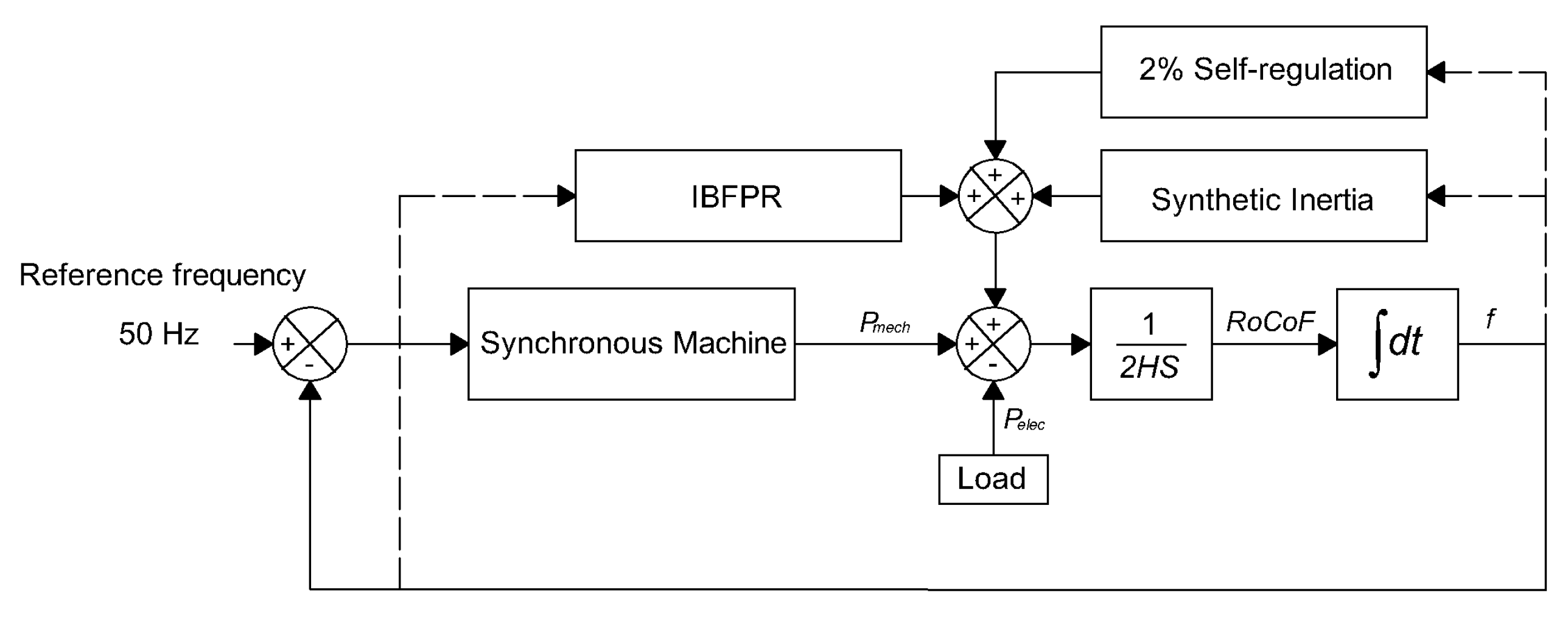
Figure 3 is the block representation of the swing Equation (
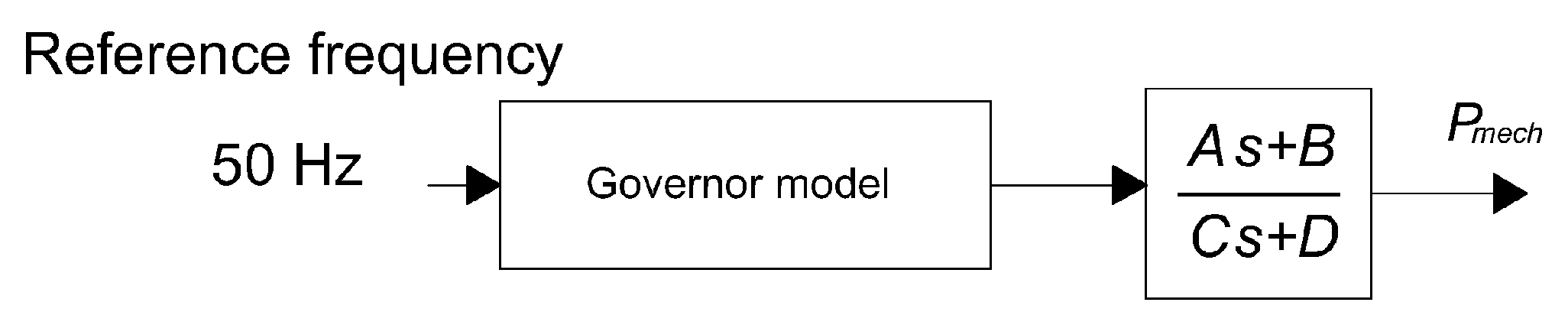
1); it only differs in the fact that additional blocks representing the inverter-based generation have been included. The mechanical power is represented by the output of a steam turbine governor model, which is used to represent the synchronous machine as depicted in
Figure 4. In the figure, R is the turbine droop, P
ref is the reference load at nominal frequency, T
1 is the governor delay, T
2 is the reset time constant, T
3 is the servo time constant, T
4 is the steam valve time constant, and T
5 is the steam re-heat time constant [
25]. When equilibrium is lost, the accelerating power is multiplied by the transfer function
, where
H is the machine inertia constant and
S is the machine power rating. From Equation (
1) this product equals the derivative of frequency; therefore, an integrator block is added to obtain the frequency response [
15,
27,
28]. A feedback loop is added and an error signal obtained from the reference frequency so that the synchronous machine can react as frequency deviates from the nominal value.
Typical governor constants are listed in
Table 4. The values of kinetic energy and time constants of a synchronous machine with 835 MVA capacity were selected to represent the synchronous response; with a load of 315 MW, the system acceleration time constant is 14 s, which is approximately today’s European acceleration constant [
14]. This is the base scenario where a 100% synchronous generation is assumed. For the sake of evaluating the impact of the inverter-based generation penetration in the system, the values of lower capacity generators were selected, diminishing the total system inertia.
Even though load imbalances up to 40% were simulated in each inertia scenario, the capacity of the generator was disregarded for the estimation of the critical time. The negative imbalance was simulated by increasing the system load.
2.5. Extended IEEE 9 Bus Model
Since it was desired to compare the obtained results in
Section 2.4 with some model that takes into account the whole system components, losses, and dynamics, an extended representation of the IEEE 9 bus model was implemented in MATLAB-Simulink [
22]. In this representation, simulations for different values of system inertia and load imbalance were performed, similarly as was done with the simplified representation of the model.
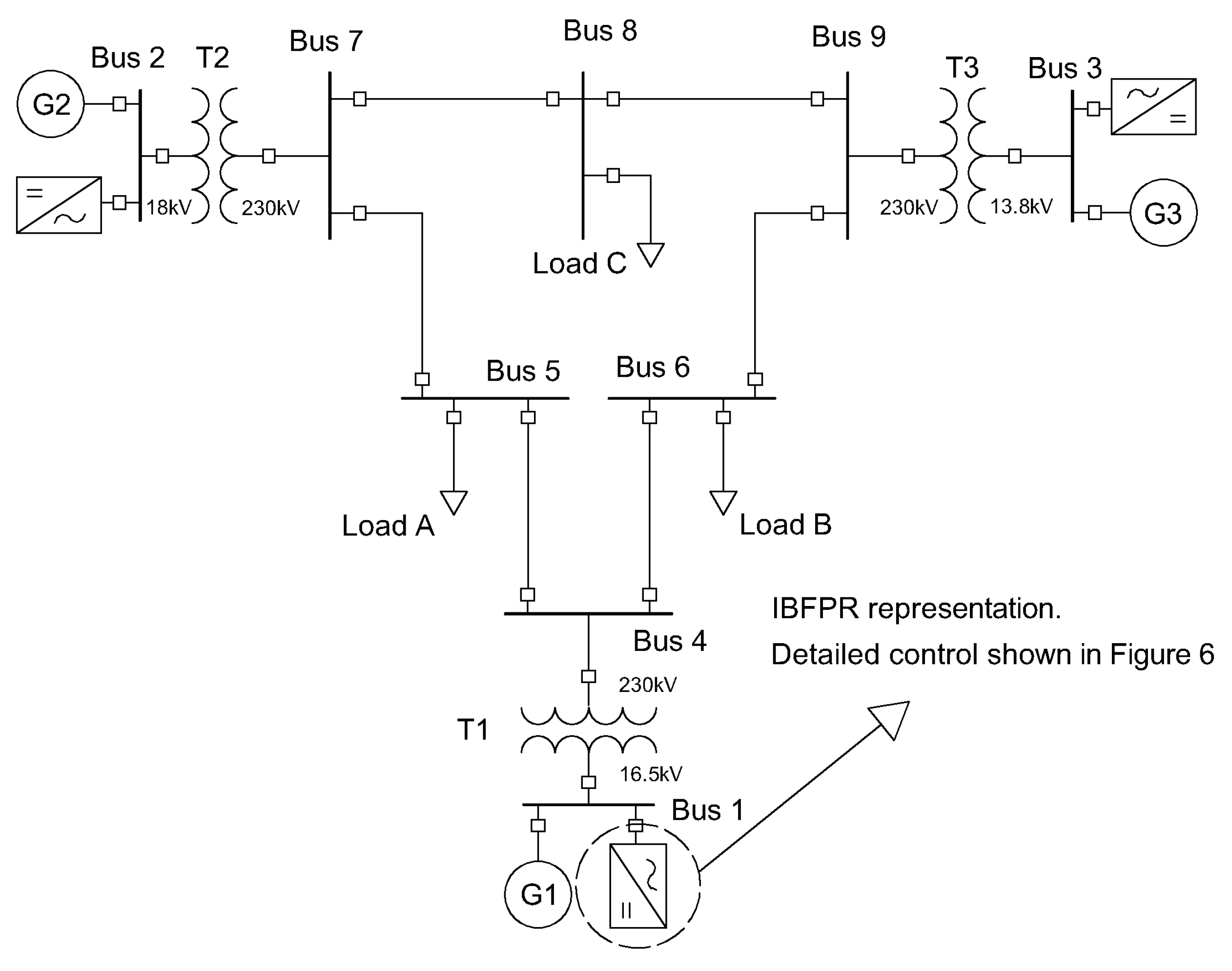
Figure 5 shows the extended IEEE 9 bus grid architecture with inverter-based generation added.
To evaluate the validity of the equation describing the IBFPR needed to avoid ULFS, the IEEE model was modified with the insertion of ideal controlled power source blocks. The power sources were set up to inject power into the grid according to the simulated scenario. Therefore, no means of frequency measurement were included, and only IBFPR was assessed. As it was done in
Section 2.4, the total acceleration time constant of the system equalled 14 s for a complete synchronous generation share. Hence, the same kinetic energy should be distributed among the three rotating masses. From Equation (
8), it can be easily calculated that the system’s kinetic energy with 14 s of acceleration time constant is 2205 MWs.
Since the inverter-based generation reduces the system’s kinetic energy, for different levels of IBG, the generator nominal capacity was kept constant and the inertia constant of each machine multiplied by the synchronous share factor . The total system kinetic energy is the summation of all the machines kinetic energy.
To start the simulations in steady-state conditions, a load flow calculation of the grid was carried out to determine the initial conditions for the exciter and prime mover models.
Table 5 summarises the main values for setting the system initial conditions from the load flow calculation.
IBFPR Representation
The IBFPR was modelled as controlled current sources. These controlled sources inject active power according to the load imbalance and system inertia simulated. The continuous measurement of voltage is required to determine the amount of current needed to supply the requested power. The IBFPR will have symmetrical and balanced characteristics. Due to that reason, the magnitude and angle of the current phasor will be obtained from the positive sequence of the measured voltage. From the definition of complex power and voltage symmetrical components in three-phase systems (
9), the positive sequence components of the phase voltage and the line current are obtained [
27].
This equation is valid for RMS values in which
is the positive sequence of the three-phase complex power,
is the positive sequence of voltage line to neutral, and
is the conjugation of the positive sequence line current. Nevertheless, the measured voltage values in MATLAB-Simulink are peak voltages, so the equations for power and current become:
With the help of the
a operator (
or 1/
120°), the values of the positive sequence component of phase voltage can be obtained.
From
and
:
Since
,
and
then after some algebraic manipulation, the expression for
becomes:
With the obtained expressions in (
12) and (
10), the current needed (
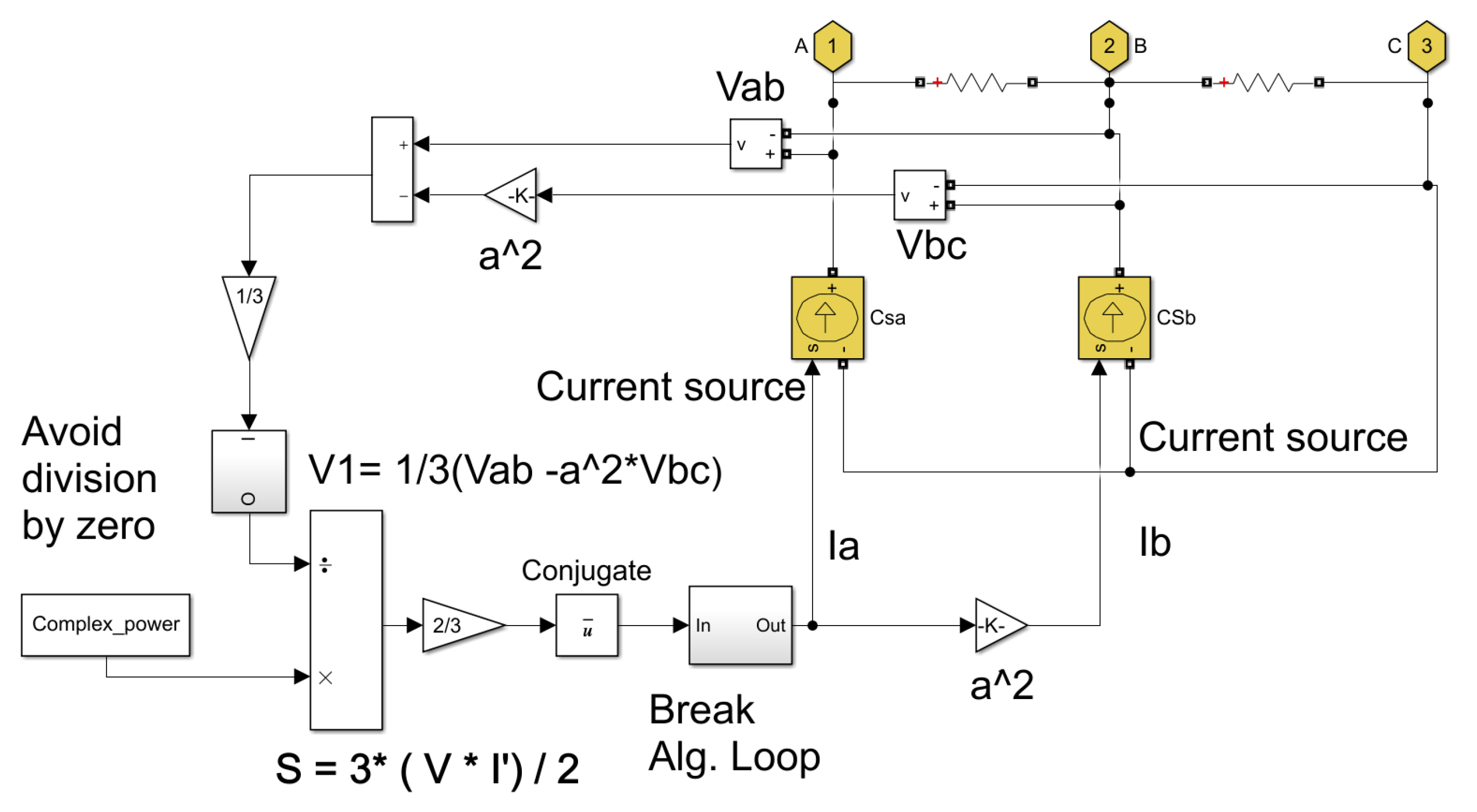
11) to supply the IBFPR related to the measured voltages can be implemented in MATLAB-Simulink, as depicted in
Figure 6. From the voltages readings of lines a-b and b-c, the voltage
is calculated using Equation (
12). Then, Equation (
11) is implemented to calculate the current to be fed into the system using the complex power response (
6) and the previously calculated value of
. The ramping function will last until the critical time is reached; afterwards, the IBFPR output will remain constant.
It must be noticed that when the IBFPR depicted in
Figure 6 was implemented in MATLAB-Simulink, additional blocks were added to run the simulation; such blocks are a break in the algebraic loop just before the conjugate block. Additionally, a block to avoid division by zero was added at the output of the gain of
[
29].
2.6. Large Scale Case: Europe Power System
Under normal operation, ENTSOE has reported values of RoCoF in the range of 5–10 mHz/s for power outages of 1 GW in the current interconnected power system. If an imbalance event of more than 3 GW occurs with depleted primary reserve, extraordinary values of frequency and RoCoF might be reached. After serious disturbances, the continental European power system has experienced RoCoF values between 100 mHz/s and 1 Hz/s. Imbalances of 20% or more along with RoCoFs greater than 1 Hz/s have been determined by experience to be critical [
14]. ENTSOE has determined that in the interconnected reference scenario, the reduction of system inertia would not jeopardise the system’s stability. Due to the expected increase of non-synchronous generation in the future, international power trade, and renewables’ variability, ENTSOE estates in its future split reference scenario that the power system must be capable of withstanding imbalances greater than 40% with RoCoF values of 2 Hz/s or higher. Under these circumstances, the resulting islands must avoid load shedding. Hence, the conditions of the split scenario are considered for further analysis. The system representation is illustrated in
Figure 7.
To fit the system behaviour to that modelled by ENTSOE, the synchronous representation in the simplified IEEE model shown in
Figure 4 was used as a base. This was done with the insertion of an additional block at the output of the governor model, as shown in
Figure 8. With this approach, the primary power reserve can be easily tuned with the assistance of the Control System Tuner application available in MATLAB. In
Figure 8, the synchronous machine block represents the governor model used in
Section 2.4. The Control System Tuner sets the constants A, B, C, and D of the additional block in the model to have a step response with a rise time of ≈30 s by establishing an overshoot of 2% and a time constant of 8 s [
28]. The time of utmost interest for analysis is from the inception of the power imbalance until the nadir time. Therefore, the system must perform as similarly as possible in this region compared to the ENTSOE reference, whereas after the nadir time, the disparity between responses can be neglected. On the European scale, the reserves must be completely deployed within 30 s after the occurrence of the disturbance.
System Parameters
When a power system with
n number of synchronous machines is assumed, granting each of them a capacity of
S MVA and a nominal power
MW, and supposing that each machine operates at a deload factor
of
, with an acceleration constant equal to
, then the number of machines
n for the load
served by synchronous machines is:
The system time acceleration constant
can be obtained as follows:
In this sense the system acceleration time constant can be calculated with a synchronous share of 100%, resulting in
s with values of
s [
14,
25], and a deload factor
. Considering only the swing equation, it can be demonstrated that RoCoF, and therefore, the frequency response of the system is only dependent on the percentage of load imbalance and the system acceleration time constant. From the definition of RoCoF as
and
:
In Equation (
15) the value of
is the normalised value of power imbalance having as base power the value of load
.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}