Test and Modeling of the Hydraulic Performance of High-Efficiency Cooling Configurations for Gyrotron Resonance Cavities

 ,
,
Abstract
:1. Introduction
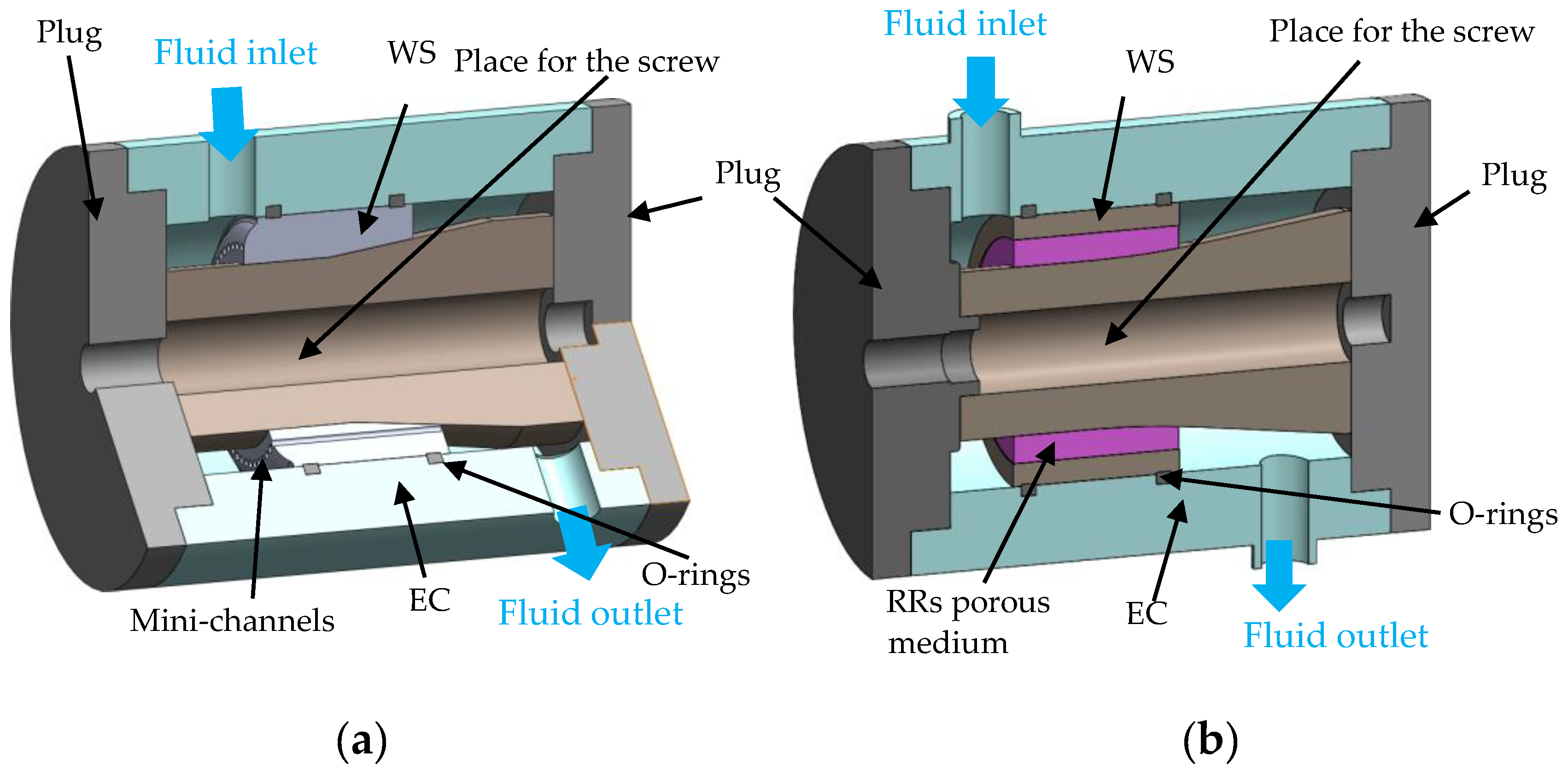
2. The Cavity Mock-Ups
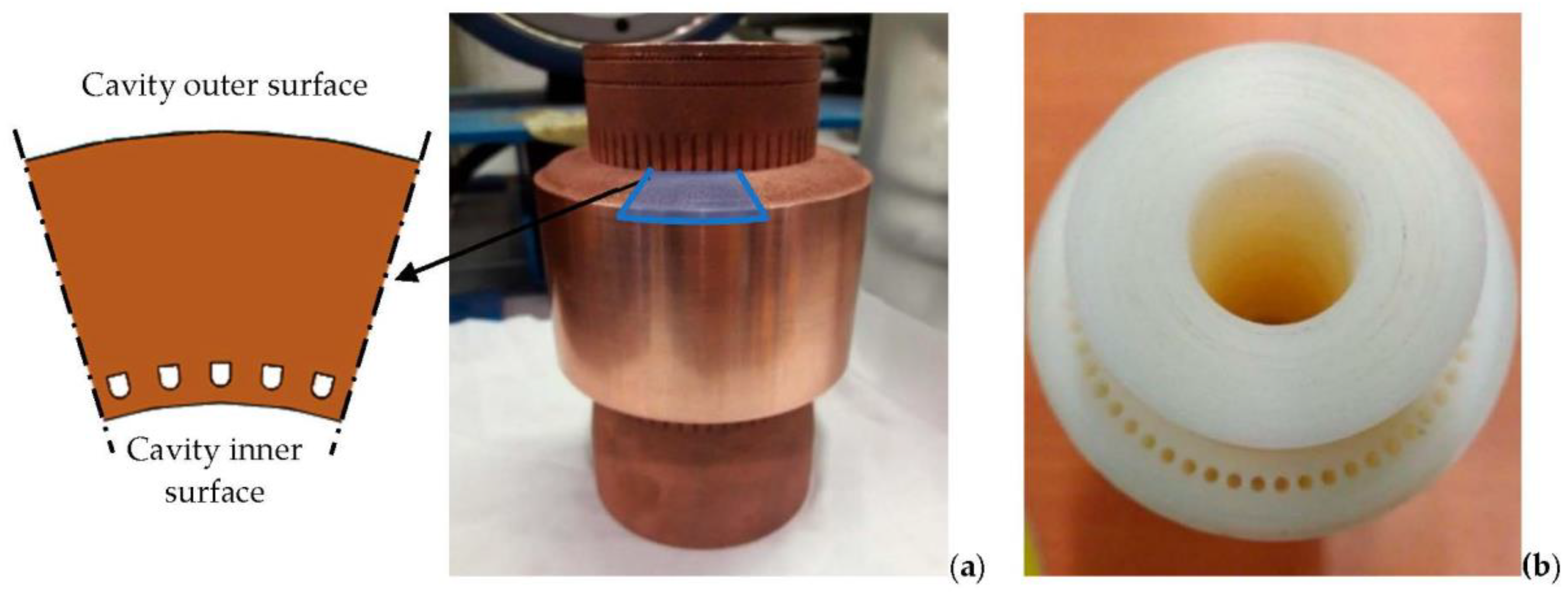
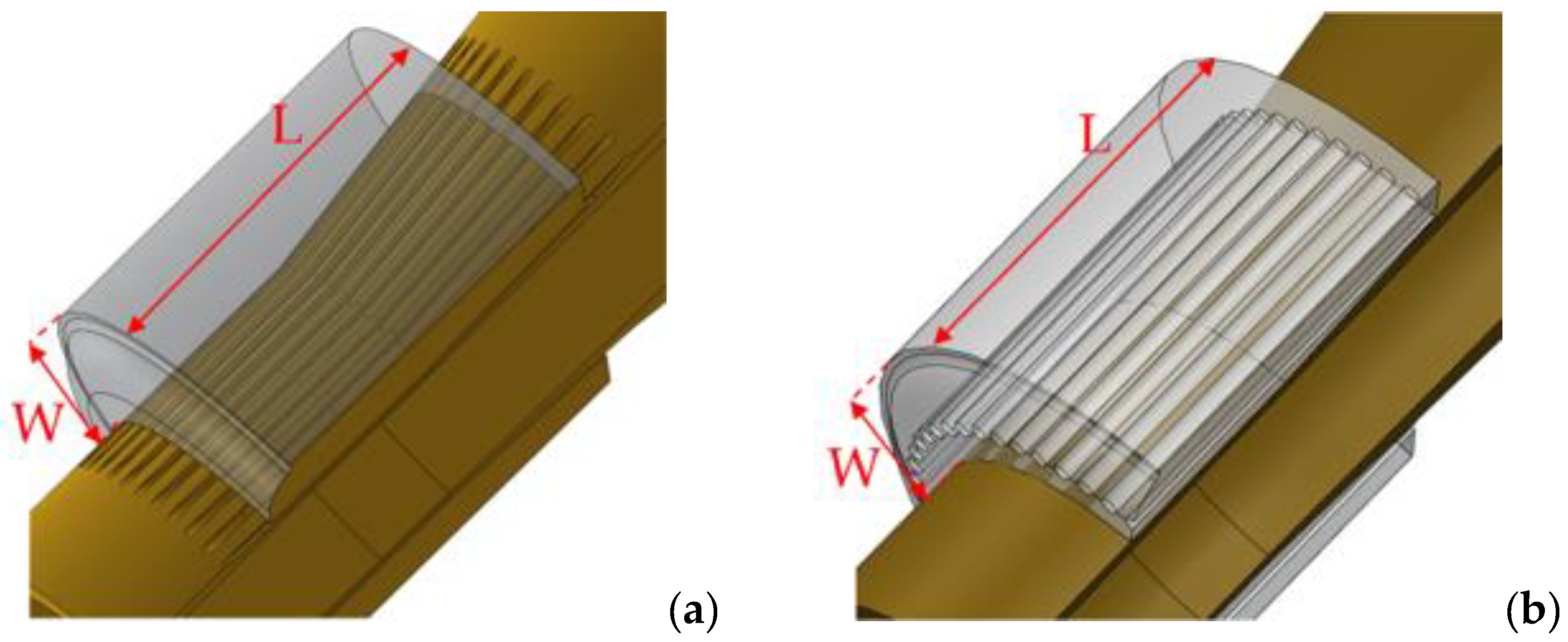
2.1. Mock-Ups Equipped with Mini-Channels
2.2. Mock-Up Equipped with RRs
3. Test Set-Up and Results
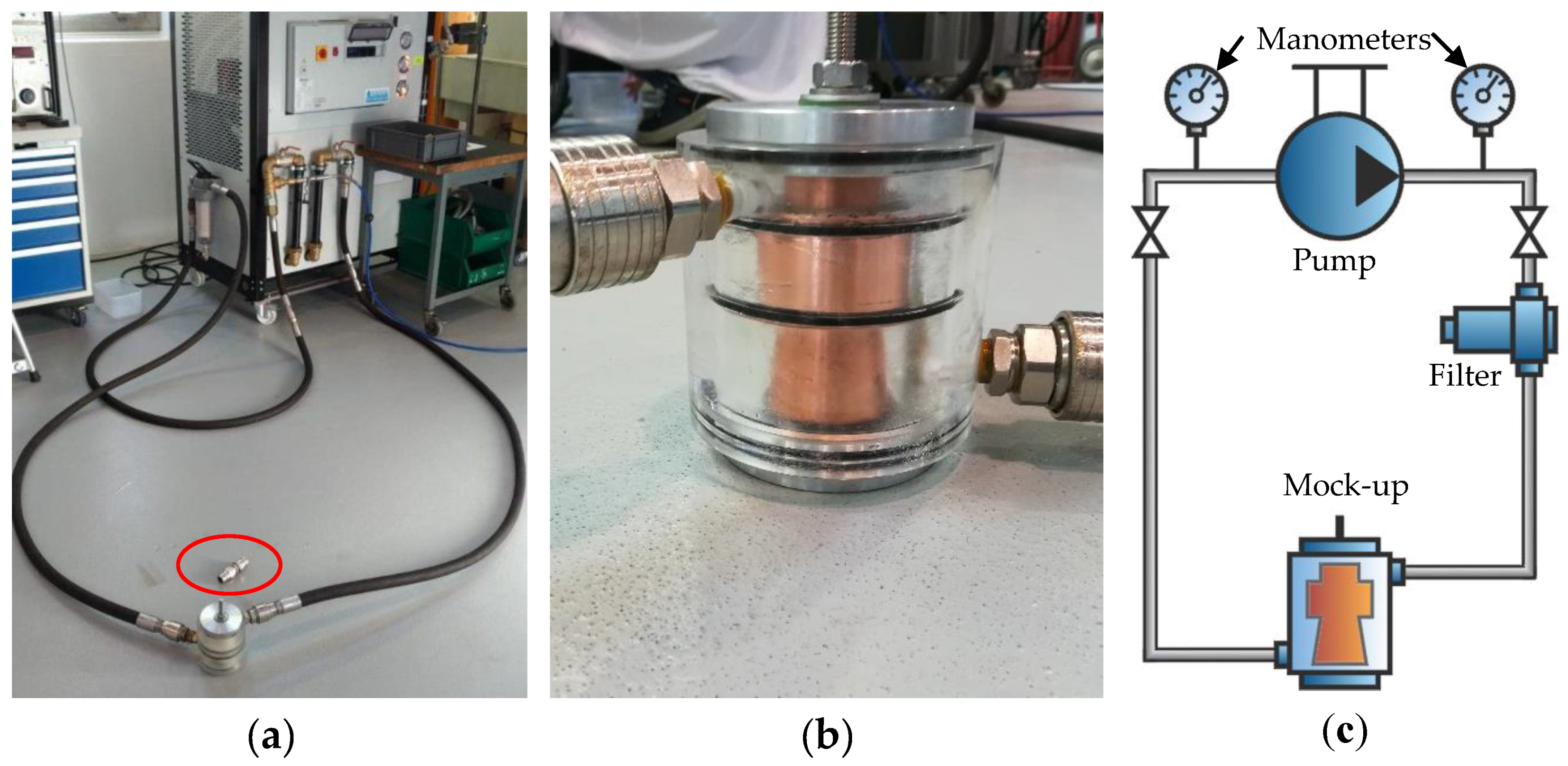
3.1. Test Facility
- -
- The precision on the flow rate was equal to ±1 L/min (±0.17 × 10−4 m3/s).
- -
- Any pressure value was measured with a precision of ±0.1 bar. Since the pressure drop could be evaluated here just as the difference between two pressure values, measured by independent manometers, the uncertainty of pressure drop doubled due to error propagation. The final pressure drop was, in turn, the difference between two pressure drops (see Equation (2)), based on the readouts of the same two manometers (see Equation (1)). Their errors could not be considered independent; thus, we conservatively kept the uncertainty on frozen to ±0.2 bar. Note that the experimental facility was originally configured to test components with a much higher pressure drop than those of the two mock-ups, so that the use of a differential pressure sensor, which would help in reducing the uncertainty, was not considered.
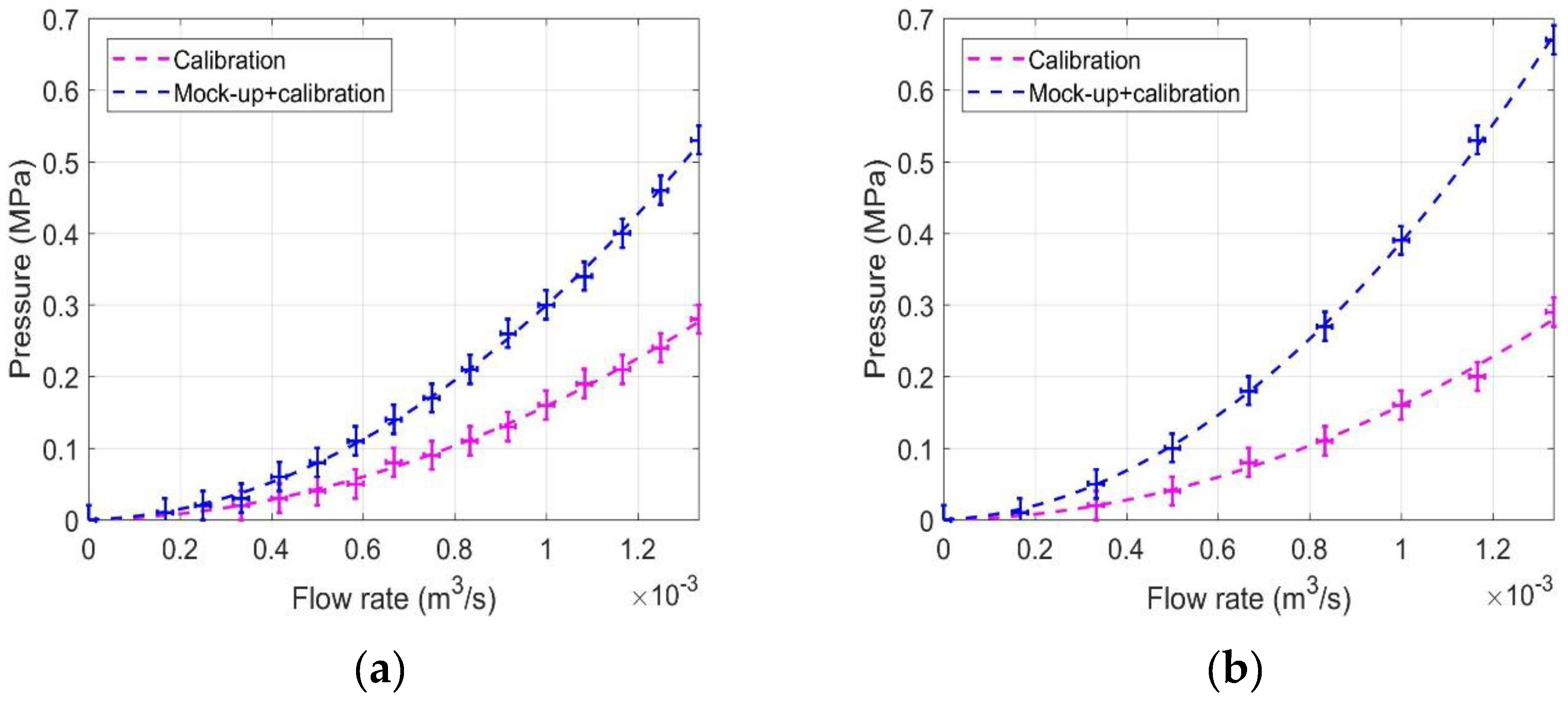
3.2. Test Results for the Mini-Channel Mock-Up
4. Simulations
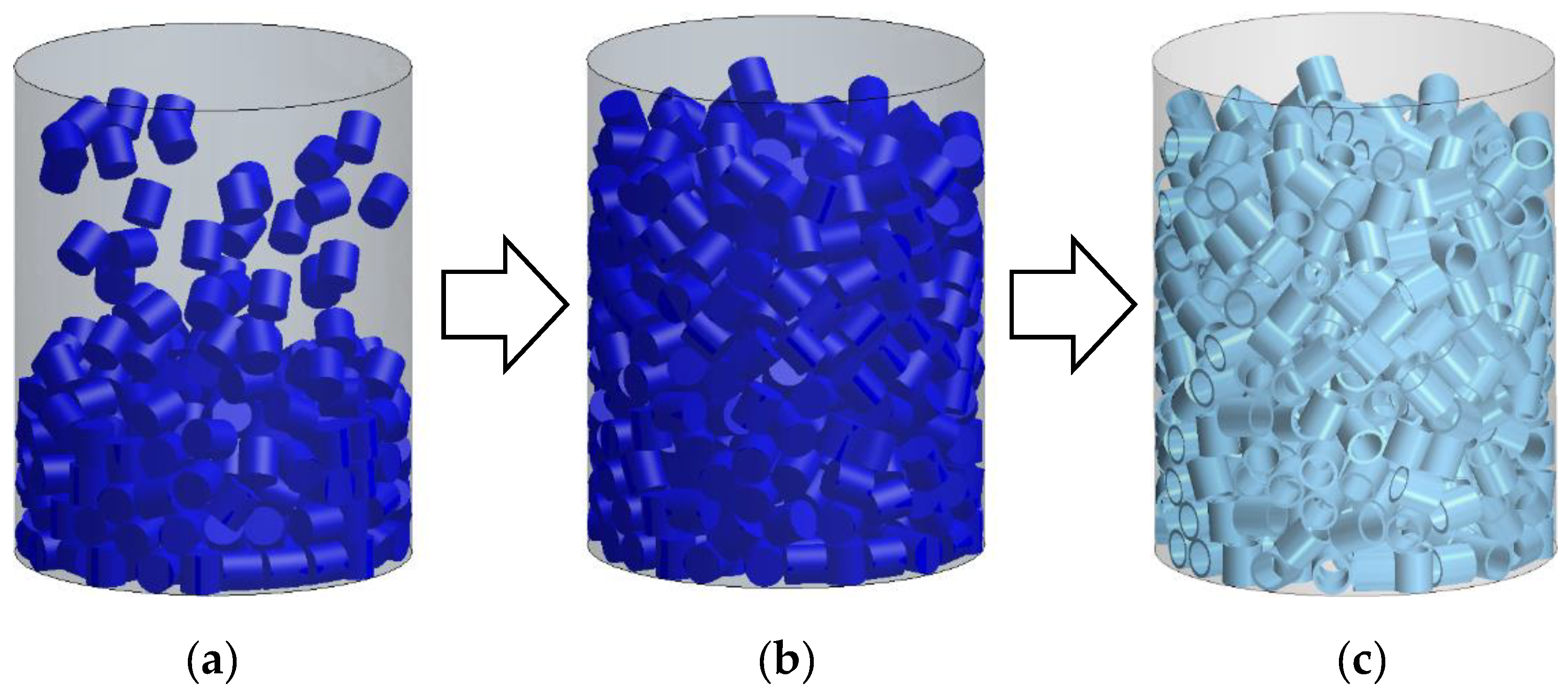
4.1. The DEM for the Raschig Rings
4.2. Turbulence Model
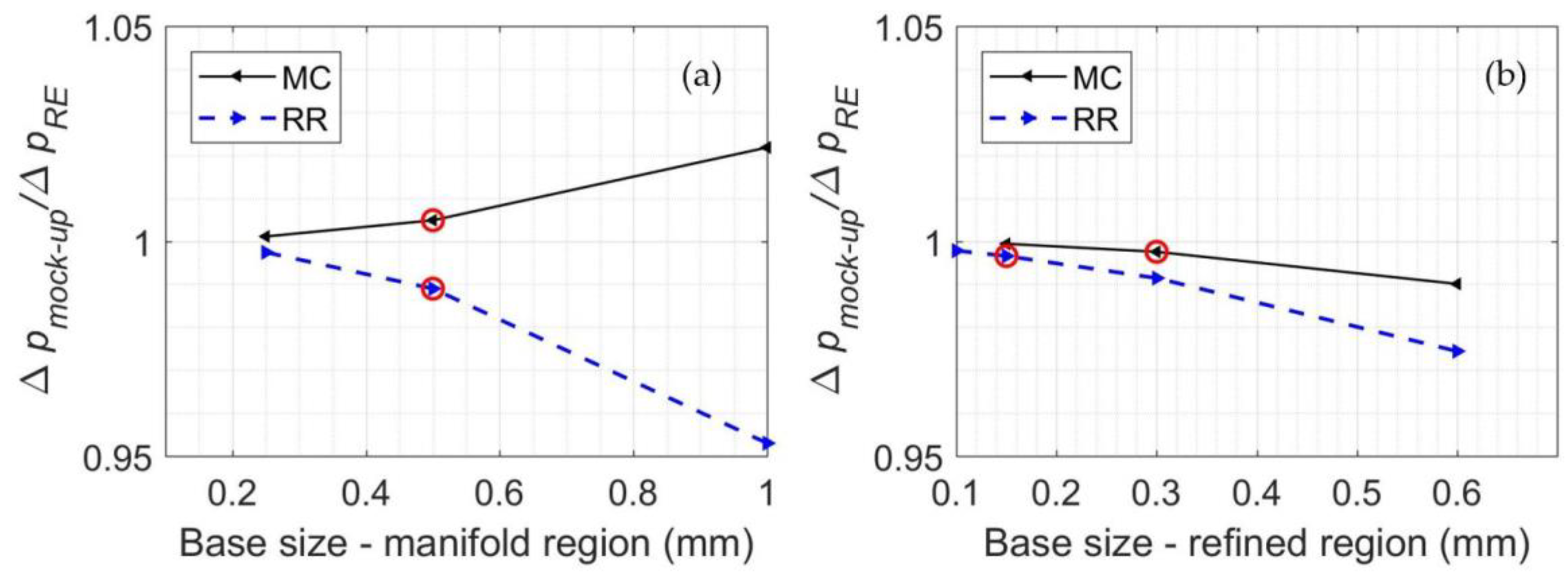
4.3. Grid
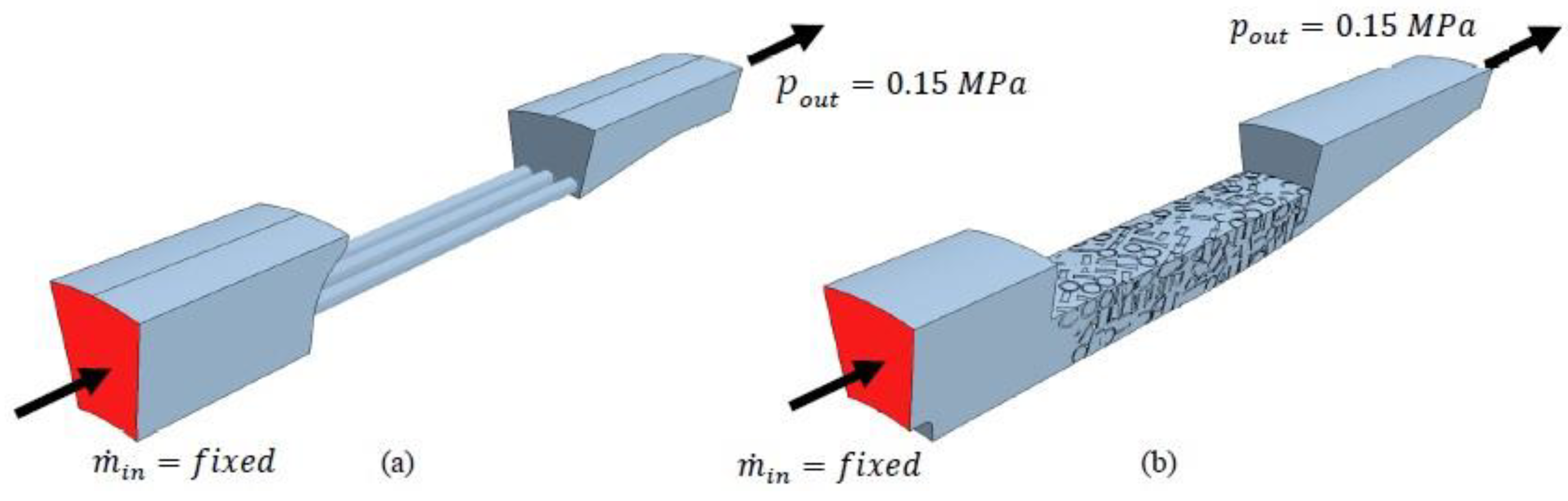
4.4. Simulation Set-Up
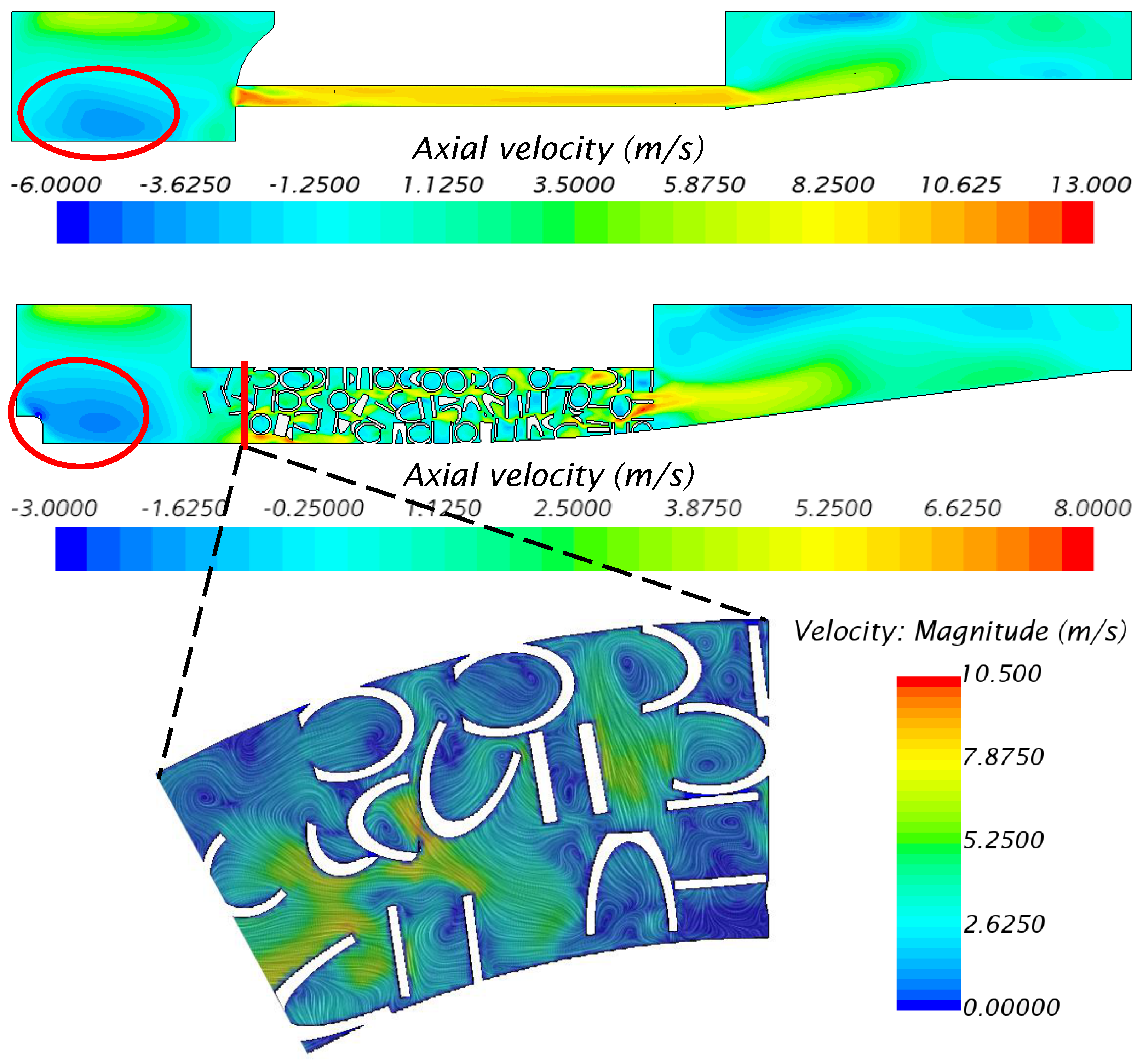
4.5. Model Results and Comparison with Experimental Data
5. Comparative Hydraulic Performance of the Two Cooling Configurations
6. Conclusions and Perspective
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AMG | algebraic multigrid |
| CAD | computer-aided design |
| CFD | computational fluid-dynamics |
| DC | direct current |
| DEM DEMO | discrete element method DEMOnstration power plant |
| EC | external cylinder |
| ECRH | electron cyclotron resonance heating |
| EWT | enhanced wall treatment |
| ITER KIT | International Thermonuclear Experimental Reactor Karlsruher Institut für Technologie |
| MCs | mini-channels |
| RANS | Reynolds-averaged Navier–Stokes |
| RF | radio frequency |
| RR | Raschig rings |
| W7X | Wendelstein 7-X |
| WS | Water-stopper |
| Nomenclature | |
| pressure drop of the test loop, excluding the mock-up | |
| pressure drop of the mock-up | |
| pressure drop of the test loop, including the mock-up | |
| inlet mass flow rate | |
| pressure at the inlet of the test pump | |
| outlet pressure (boundary condition) | |
| pressure at the outlet of the mock-up | |
| pressure at the outlet of the test pump | |
| Reynolds number | |
| pellet Reynolds number | |
| water temperature | |
| dimensionless wall distance | |
References
- ITER Organization. External Heating Systems. Available online: https://www.iter.org/mach/heating (accessed on 18 December 2019).
- EUROfusion. Fusion on Earth. Available online: https://www.euro-fusion.org/fusion/fusion-on-earth/ (accessed on 18 December 2019).
- Max Planck Institute for Plasma Physics. Stellarator Theory. Available online: https://www.ipp.mpg.de/ippcms/eng/for/bereiche/stellarator (accessed on 18 December 2019).
- Kartikeyan, M.V.; Borie, E.; Thumm, M.K.A. Gyrotrons: High Power Microwave and Millimeter Wave Technology, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Avramidis, K.A.; Bertinetti, A.; Albajar, F.; Cau, F.; Cismondi, F.; Gantenbein, G.; Illy, S.; Ioannidis, Z.C.; Jelonnek, J.; Legrand, F.; et al. Numerical studies on the influence of cavity thermal expansion on the performance of high-power Gyrotron. IEEE Trans. Electron Devices 2018, 65, 2308–2315. [Google Scholar] [CrossRef]
- Jelonnek, J.; Aiello, G.; Albaiar, F.; Alberti, S.; Avramidis, K.A.; Bertinetti, A.; Brucker, P.T.; Bruschi, A.; Chclis, I.; Dubray, J.; et al. From W7-X towards ITER and Beyond: 2019 Status on EU Fusion Gyrotron Developments. In Proceedings of the 2019 International Vacuum Electronics Conference (IVEC), Busan, Korea, 29 April–1 May 2019. [Google Scholar]
- Jelonnek, J.; Aiello, G.; Alberti, S.; Avramidis, K.; Braunmuller, F.; Bruschi, A.; Chelis, J.; Franck, J.; Franke, T.; Gantenbein, G.; et al. Design considerations for future DEMO gyrotrons: A review on related gyrotron activities within EUROfusion. Fusion Eng. Des. 2017, 123, 241–246. [Google Scholar] [CrossRef]
- Savoldi, L.; Albajar, F.; Alberti, S.; Avramidis, B.A.; Bertinetti, A.; Cau, F.; Cismondi, F.; Gantenbein, G.; Hogge, J.P.; Ioannidis, Z.C.; et al. Assessment and optimization of the cavity thermal performance for the European continuous wave gyrotrons. In Proceedings of the 27th IAEA Fusion Energy Conference (FEC 2018), Gāndhināgar, Indien, 22–27 October 2018. [Google Scholar]
- Sella, A. Raschig’s Rings. Chem. World 2008, 5, 83. [Google Scholar]
- Kumar, A.; Kumar, N.; Singh, U.; Khatun, H.; Vyas, V.; Sinha, A.K. Thermal and Structural Analysis and its Effect on Beam-Wave Interaction for 170-GHz, 1-MW Gyrotron Cavity. J. Fusion Energy 2012, 31, 164–169. [Google Scholar] [CrossRef]
- Karmakar, S.; Sudhakar, R.; Mudiganti, J.C.; Seshadri, R.; Kartikeyan, M.V. Electrical and Thermal Design of a W-Band Gyrotron Interaction Cavity. IEEE Trans. Plasma Sci. 2019, 47, 3155–3159. [Google Scholar] [CrossRef]
- Savoldi, L.; Bertinetti, A.; Nallo, G.F.; Zappatore, A.; Zanino, R.; Cau, F.; Cismondi, F.; Rozier, Y. CFD analysis of different cooling options for a Gyrotron cavity. IEEE Trans. Plasma Sci. 2016, 44, 3432–3438. [Google Scholar] [CrossRef]
- Savoldi, L.; Bertinetti, A.; Nallo, G.F.; Zappatore, A.; Zanino, R.; Cau, F.; Cismondi, F.; Rozier, Y. CFD analysis of mini-channels cooling for Gyrotron cavity. In Proceedings of the 26th Symposium on Fusion Engineering (SOFE), Austin, TX, USA, 31 May–4 June 2015. [Google Scholar]
- Bertinetti, A.; Avramidis, K.; Albajar, F.; Cau, F.; Cismondi, F.; Savoldi, L.; Zanino, R. Multi-physics analysis of a 1 MW gyrotron cavity cooled by mini-channels. Fusion Eng. Des. 2017, 123, 313–316. [Google Scholar] [CrossRef]
- Bertinetti, A.; Albajar, F.; Cau, F.; Leggieri, A.; Legrand, F.; Perial, E.; Ritz, G.; Savoldi, L.; Zanino, R.; Zappatore, A. Design, test and analysis of a gyrotron cavity mock-up cooled using mini channels. IEEE Trans. Plasma Sci. 2018, 46, 2207–2215. [Google Scholar] [CrossRef]
- Kalaria, P.; Brücker, P.T.; Ruess, S.; Illy, S.; Avramidis, K.A.; Gantenbein, G.; Thumm, M.; Jelonnek, J. Design Studies of Mini-Channel Cavity Cooling for a 170 GHz, 2 MW Coaxial-Cavity Gyrotron. In Proceedings of the 2019 International Vacuum Electronics Conference (IVEC), Busan, Korea, 29 April–1 May 2019. [Google Scholar]
- Zhong, W.; Yu, A.; Liu, X.; Tong, Z.; Zhang, H. DEM/CFD-DEM Modelling of Non-spherical Particulate Systems: Theoretical Developments and Applications. Powder Technol. 2016, 302, 108–152. [Google Scholar] [CrossRef]
- Dong, Y.; Sosna, B.; Korup, O.; Rosowski, F.; Horn, R. Investigation of radial heat transfer in a fixed-bed reactor: CFD simulations and profile measurements. Chem. Eng. J. 2017, 317, 204–214. [Google Scholar] [CrossRef]
- Wehinger, G.D.; Füterer, C.; Kraume, M. Contact modifications for CFD simulations of fixed-bed reactors: Cylindrical particles. Ind. Eng. Chem. Res. 2017, 56, 87–99. [Google Scholar] [CrossRef]
- Moghaddam, E.M.; Foumeny, E.A.; Stankiewicz, A.I.; Padding, J.T. Rigid body dynamics algorithm for modeling random packing structures of nonspherical and nonconvex pellets. Ind. Eng. Chem. Res. 2018, 57, 14988–15007. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moghaddam, E.M.; Foumeny, E.A.; Stankiewicz, A.I.; Padding, J.T. Hydrodynamics of narrow-tube fixed bed reactors filled with Raschig Rings. Chem. Eng. Sci. X 2020, 5, 100057. [Google Scholar] [CrossRef]
- Difonzo, R. Design and Optimization of the Cooling Strategy for a Gyrotron Cavity Equipped with Mini-Channels. Master’s Thesis, Politecnico di Torino, Turin, Italy, 2019. [Google Scholar]
- Star-CCM+ User’s Guide v 14.02; Siemens PLM Software Inc.: Plano, TX, USA, 2019.
- Menter, F.R. Two-Equation Eddy-Viscosity Turbulence Models for Engineering Applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Reynolds, O. On the Dynamical Theory of Incompressible Viscous Fluids and the Determination of the Criterion. Philos. Trans. R. Soc. Lond. A 1895, 186, 123–164. [Google Scholar]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method; Pearson Education Ltd.: Harlow, UK, 2007. [Google Scholar]
- Ferziger, J.H.; Peric, M. Computational Methods for Fluid Dynamics; Springer: Berlin/Heiderlberg, Germany, 2002. [Google Scholar]
- The International Association for the Properties of Water and Steam. Available online: http://www.iapws.org/ (accessed on 7 January 2020).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Base Size in Manifold Region (mm) | Bas Size in the Refined Region (mm) | Number of Prism Layers | Total Number of Cells (Million) |
|---|---|---|---|---|
| MCs | 0.5 | 0.3 | 5 | 17.7 |
| RRs | 0.5 | 0.15 | 5 | 25.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Allio, A.; Difonzo, R.; Leggieri, A.; Legrand, F.; Marchesin, R.; Savoldi, L. Test and Modeling of the Hydraulic Performance of High-Efficiency Cooling Configurations for Gyrotron Resonance Cavities. Energies 2020, 13, 1163. https://doi.org/10.3390/en13051163
Allio A, Difonzo R, Leggieri A, Legrand F, Marchesin R, Savoldi L. Test and Modeling of the Hydraulic Performance of High-Efficiency Cooling Configurations for Gyrotron Resonance Cavities. Energies. 2020; 13(5):1163. https://doi.org/10.3390/en13051163
Chicago/Turabian StyleAllio, Andrea, Rosa Difonzo, Alberto Leggieri, François Legrand, Rodolphe Marchesin, and Laura Savoldi. 2020. "Test and Modeling of the Hydraulic Performance of High-Efficiency Cooling Configurations for Gyrotron Resonance Cavities" Energies 13, no. 5: 1163. https://doi.org/10.3390/en13051163