Disturbance Observer-Based Prescribed Performance Fault-Tolerant Control for a Multi-Area Interconnected Power System with a Hybrid Energy Storage System


Abstract
:1. Introduction
- To the best of the author’s knowledge, so far there have been few reports in published literature that combine prescribed performance control with FTC and apply it to load frequency control of the MIPS;
- Compared to a few existing methods, by designing the finite time disturbance observer, the performance of the observer is improved from asymptotic convergence to finite time convergence.
2. Problem Formulation and Preliminaries
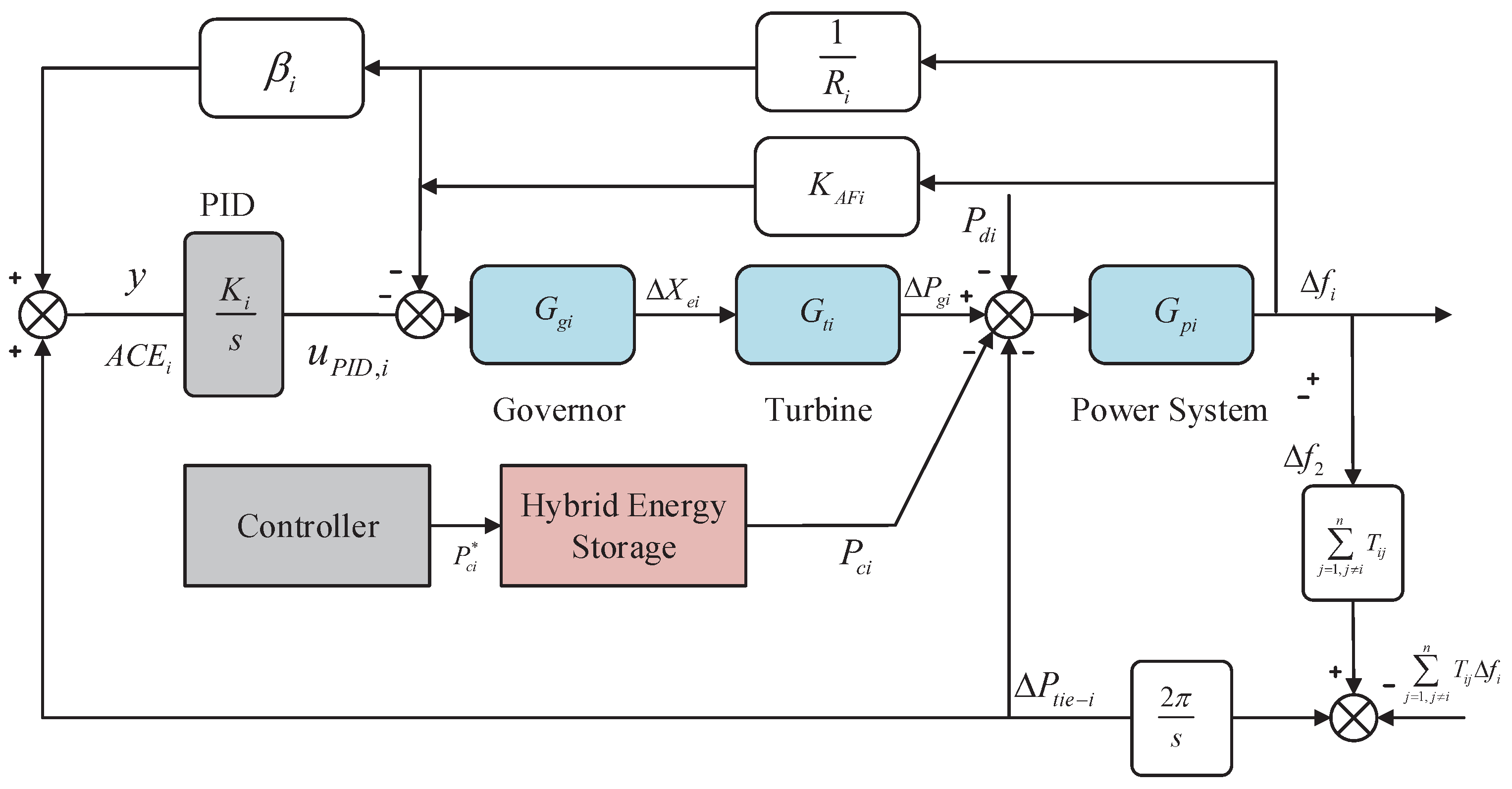
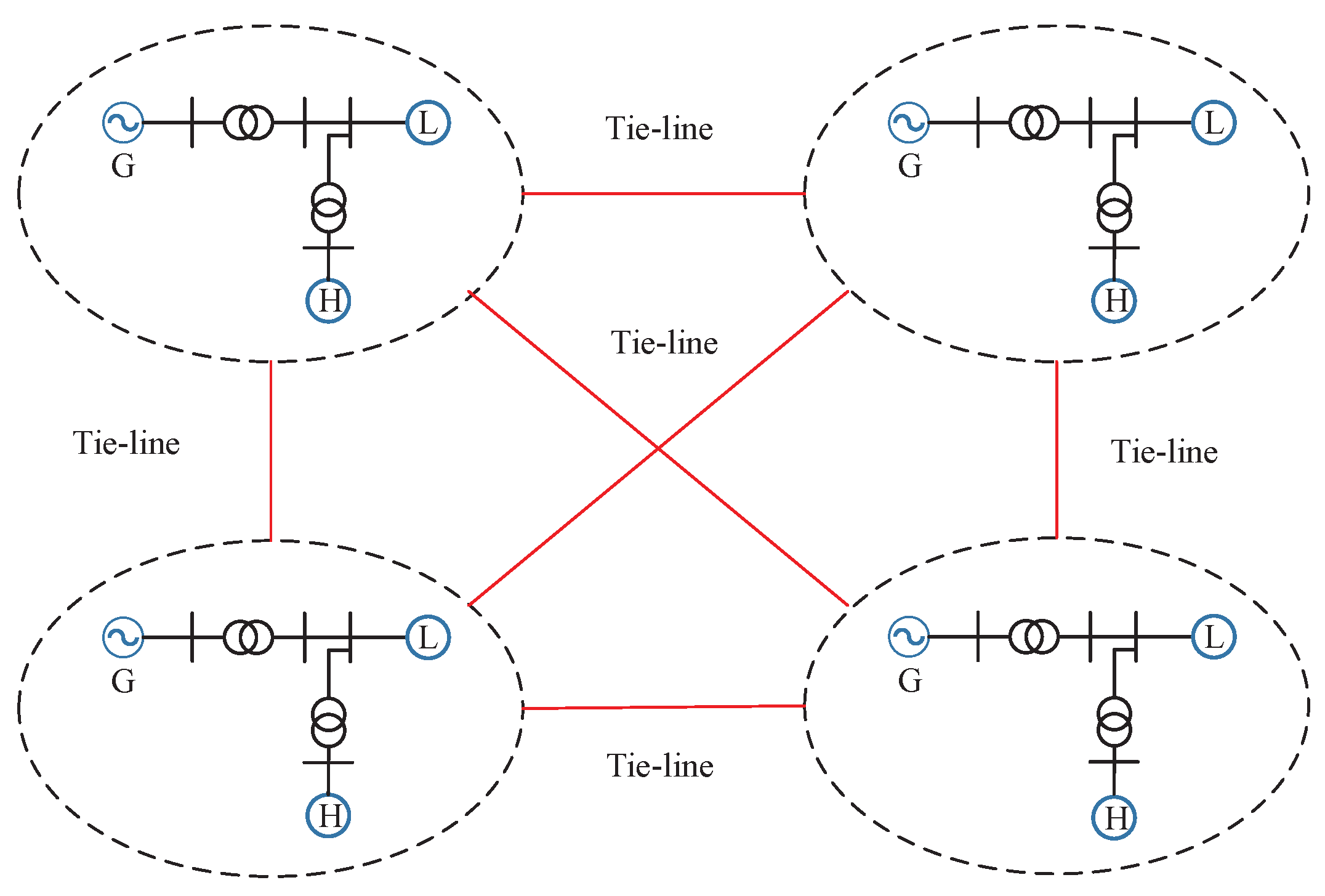
2.1. Modeling of the MIPS
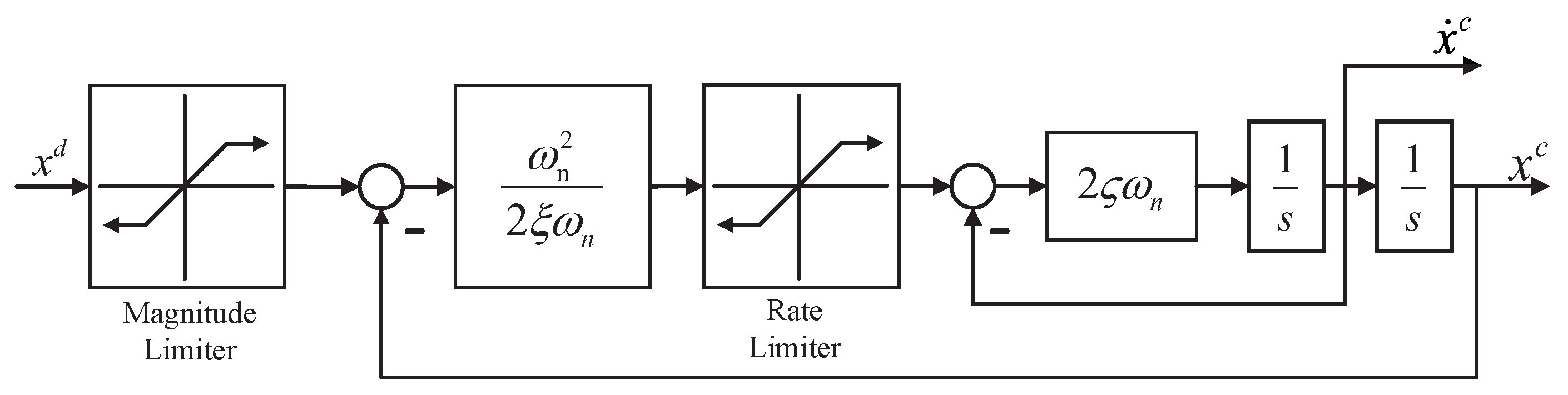
2.2. Command Filter
2.3. Prescribed Performance Control
- 1)
- is a positive and decreasing function;
- 2)
- .
- (1)
- Function is smooth and strictly increasing;
- (2)
- (3)
3. Main Results
3.1. Finite Time Disturbance Observer Design
3.2. Prescribed Performance Fault-Tolerant Controller Design
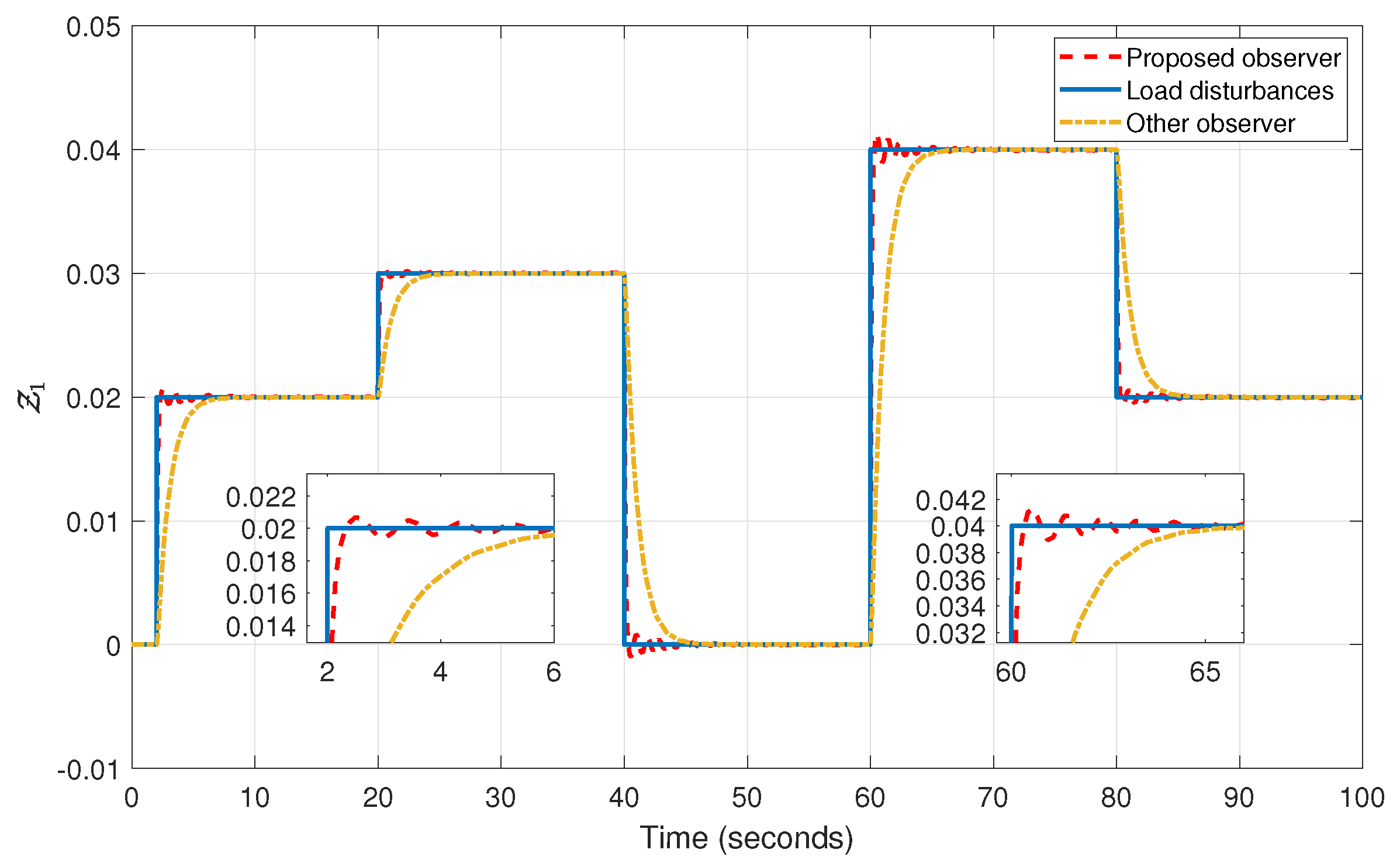
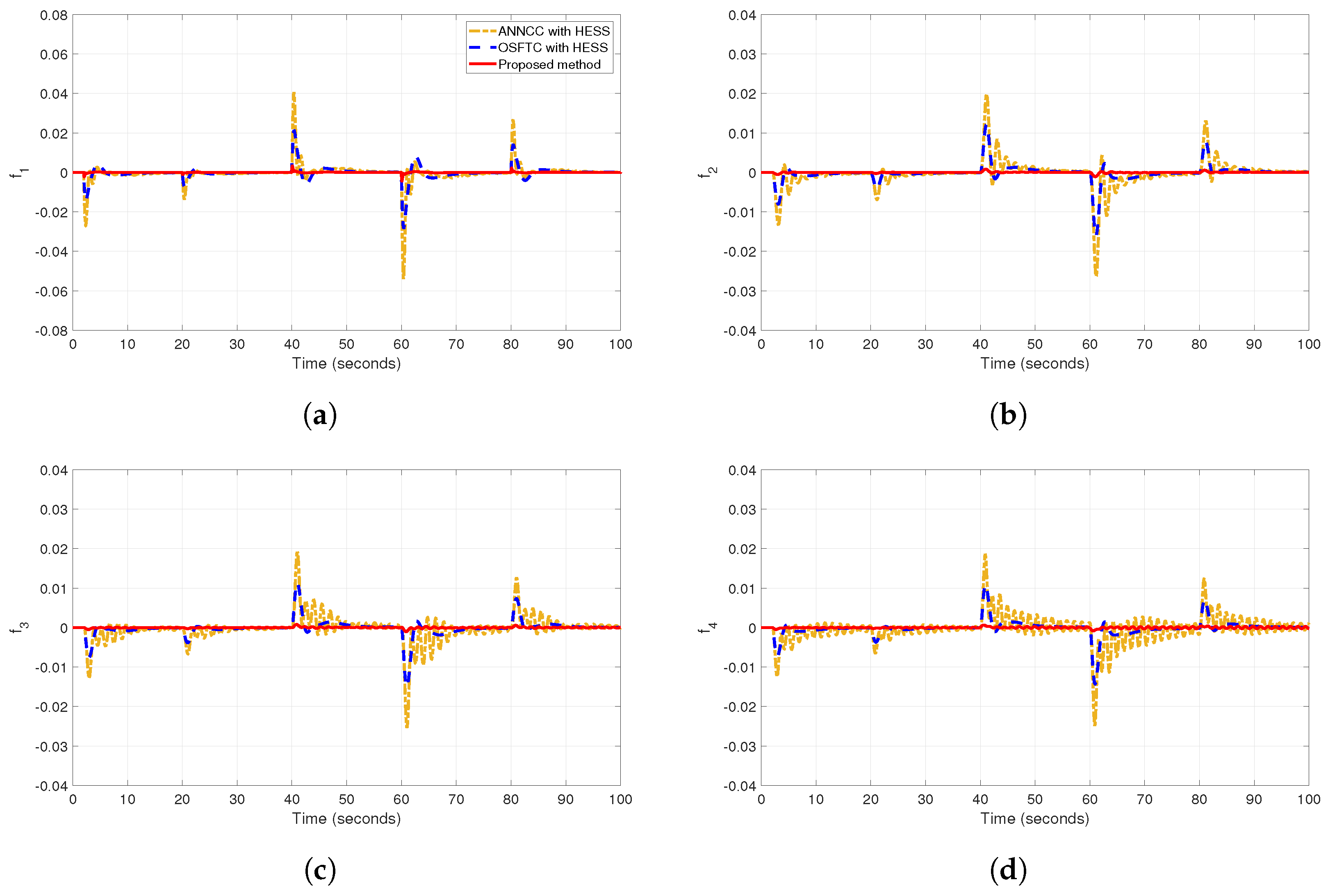
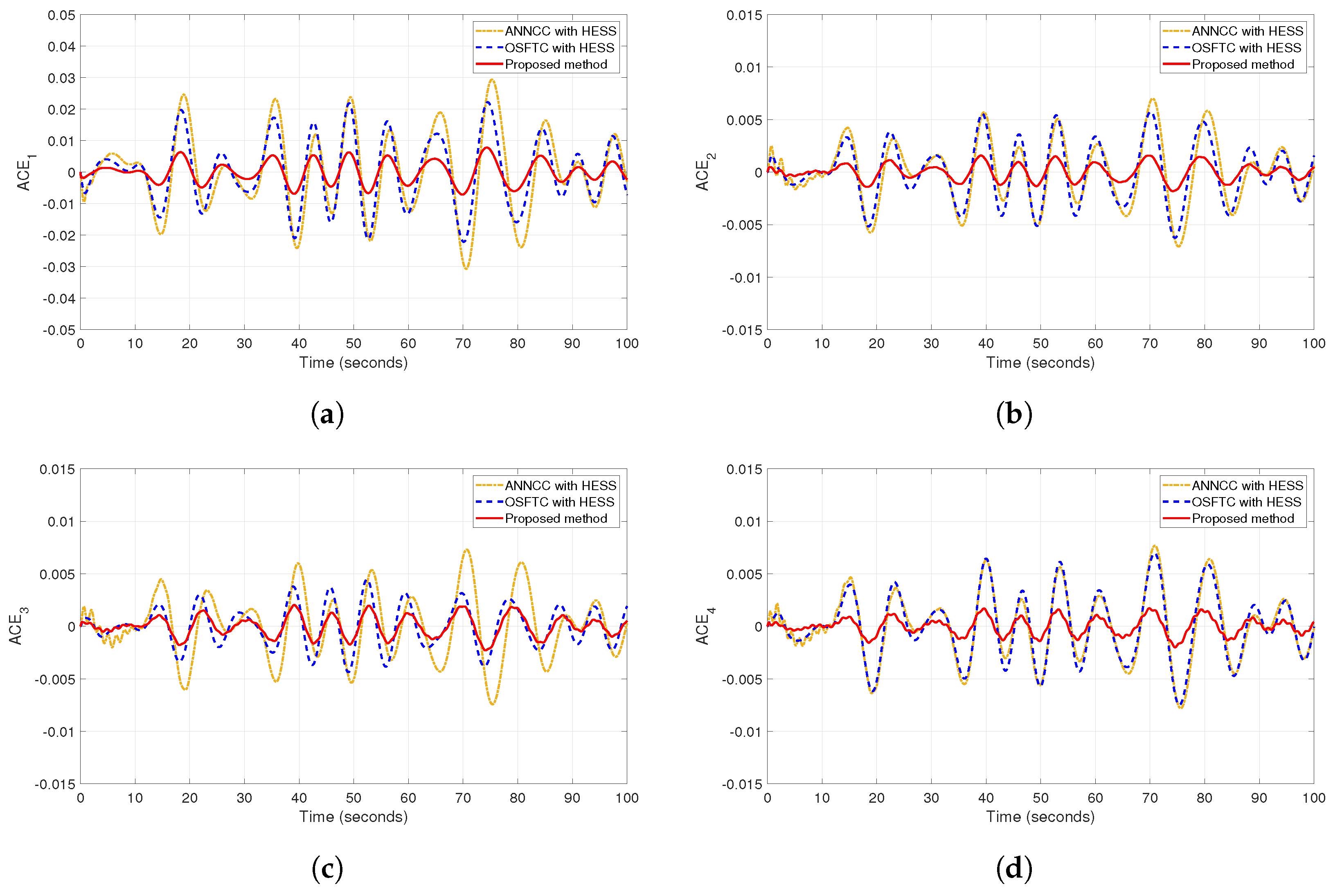
4. Simulations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, C.; Lin, W.; Ke, D.; Sun, Y. Smoothing tie-line power fluctuations for industrial microgrids by demand side control: An output regulation approach. IEEE Trans. Power Syst. 2019, 34, 3716–3728. [Google Scholar] [CrossRef]
- Singh, J.; Chattterjee, K.; Vishwakarma, C. Two degree of freedom internal model control-PID design for LFC of power systems via logarithmic approximations. ISA Trans. 2018, 72, 185–196. [Google Scholar] [CrossRef] [PubMed]
- Alhelou, H.H.; Golshan, M.E.H.; Hatziargyriou, N.D. A decentralized functional observer based optimal LFC considering unknown inputs, uncertainties and cyber-attacks. IEEE Trans. Power Syst. 2019, 34, 4408–4417. [Google Scholar] [CrossRef]
- Mu, C.; Tang, Y.; He, H. Improved sliding mode design for load frequency control of power system integrated an adaptive learning strategy. IEEE Trans. Ind. Electron. 2017, 64, 6742–6751. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T.; Blaabjerg, F.; Davari, P.; Dragicevic, T. A robust adaptive load frequency control for micro-grids. ISA Trans. 2016, 65, 220–229. [Google Scholar] [CrossRef]
- Pathak, N.; Verma, A.; Bhatti, T.; Nasiruddin, I. Modeling of HVDC tie links and their utilization in AGC/LFC operations of multiarea power systems. IEEE Trans. Ind. Electron. 2018, 66, 2185–2197. [Google Scholar] [CrossRef]
- Albatsh, F.M.; Mekhilef, S.; Ahmad, S.; Mokhlis, H.; Hassan, M. Enhancing power transfer capability through flexible AC transmission system devices: A review. Front. Inf. Technol. Electron. Eng. 2015, 16, 658–678. [Google Scholar] [CrossRef]
- Mohanty, A.; Patra, S.; Ray, P.K. Robust fuzzy-sliding mode based UPFC controller for transient stability analysis in autonomous wind-diesel-PV hybrid system. IET Gener. Transm. Distrib. 2016, 10, 1248–1257. [Google Scholar] [CrossRef]
- Debbarma, S.; Dutta, A. Utilizing electric vehicles for LFC in restructured power systems using fractional order controller. IEEE Trans. Smart Grid 2016, 8, 2554–2564. [Google Scholar] [CrossRef]
- Xu, D.; Liu, J.; Yan, X.G.; Yan, W. A novel adaptive neural network constrained control for a multi-area interconnected power system with hybrid energy storage. IEEE Trans. Ind. Electron. 2017, 65, 6625–6634. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R.; Sun, F. Model predictive control for power management in a plug-in hybrid electric vehicle with a hybrid energy storage system. Appl. Energy 2017, 185, 1654–1662. [Google Scholar] [CrossRef]
- Yang, W.; Yu, D.; Xu, D.; Zhang, Y. Observer-based sliding mode FTC for multi-area interconnected power systems against hybrid energy storage faults. Energies 2019, 12, 2819. [Google Scholar] [CrossRef] [Green Version]
- Fathima, A.H.; Palanisamy, K. Optimization in microgrids with hybrid energy systems—A review. Renew. Sustain. Energy Rev. 2015, 45, 431–446. [Google Scholar] [CrossRef]
- Attya, A.B.T.; Hartkopf, T. Utilising stored wind energy by hydro-pumped storage to provide frequency support at high levels of wind energy penetration. IET Gener. Transm. Distrib. 2015, 9, 1485–1497. [Google Scholar] [CrossRef] [Green Version]
- Shankar, R.; Bhushan, R.; Chatterjee, K. Small-signal stability analysis for two-area interconnected power system with load frequency controller in coordination with FACTS and energy storage device. Ain Shams Eng. J. 2016, 7, 603–612. [Google Scholar] [CrossRef] [Green Version]
- Shankar, R.; Chatterjee, K.; Bhushan, R. Impact of energy storage system on load frequency control for diverse sources of interconnected power system in deregulated power environment. Int. J. Electr. Power Energy Syst. 2016, 79, 11–26. [Google Scholar] [CrossRef]
- Ranjan, S.; Das, D.C.; Latif, A.; Sinha, N. LFC for autonomous hybrid micro grid system of 3 unequal renewable areas using mine blast algorithm. Int. J. Renew. Energy Res. (IJRER) 2018, 8, 1297–1308. [Google Scholar]
- Xiong, R.; Cao, J.; Yu, Q. Reinforcement learning-based real-time power management for hybrid energy storage system in the plug-in hybrid electric vehicle. Appl. Energy 2018, 211, 538–548. [Google Scholar] [CrossRef]
- Shao, X.; Hu, Q.; Shi, Y.; Jiang, B. Fault-tolerant prescribed performance attitude tracking control for spacecraft under input saturation. IEEE Trans. Control. Syst. Technol. 2018, 28, 574–582. [Google Scholar] [CrossRef]
- Shahbazi, M.; Poure, P.; Saadate, S. Real-time power switch fault diagnosis and fault-tolerant operation in a DFIG-based wind energy system. Renew. Energy 2018, 116, 209–218. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Zhou, Z.; Jiang, G.; Qian, M.; Lin, J. Active fault tolerant control scheme for satellite attitude systems: Multiple actuator faults case. Int. J. Control. Autom. Syst. 2018, 16, 1794–1804. [Google Scholar] [CrossRef]
- Su, X.; Liu, X.; Song, Y.D. Fault-tolerant control of multiarea power systems via a sliding-mode observer technique. IEEE/ASME Trans. Mechatron. 2017, 23, 38–47. [Google Scholar] [CrossRef]
- Lan, J.; Patton, R.J.; Zhu, X. Fault-tolerant wind turbine pitch control using adaptive sliding mode estimation. Renew. Energy 2018, 116, 219–231. [Google Scholar] [CrossRef]
- Zhang, C.; Ma, G.; Sun, Y.; Li, C. Observer-based prescribed performance attitude control for flexible spacecraft with actuator saturation. ISA Trans. 2019, 89, 84–95. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.X.; Yang, G.H. Fuzzy adaptive output feedback control of uncertain nonlinear systems with prescribed performance. IEEE Trans. Cybern. 2017, 48, 1342–1354. [Google Scholar] [CrossRef] [PubMed]
- Na, J.; Huang, Y.; Wu, X.; Gao, G.; Herrmann, G.; Jiang, J.Z. Active adaptive estimation and control for vehicle suspensions with prescribed performance. IEEE Trans. Control. Syst. Technol. 2017, 26, 2063–2077. [Google Scholar] [CrossRef] [Green Version]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Chang, R.; Fang, Y.; Liu, L.; Li, J. Decentralized prescribed performance adaptive tracking control for markovian jump uncertain nonlinear systems with input saturation. Int. J. Adapt. Control. Signal Process. 2017, 31, 255–274. [Google Scholar] [CrossRef]
- Yang, Q.; Chen, M. Adaptive neural prescribed performance tracking control for near space vehicles with input nonlinearity. Neurocomputing 2016, 174, 780–789. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Prescribed performance fault-tolerant control of uncertain nonlinear systems with unknown control directions. IEEE Trans. Autom. Control. 2017, 62, 6529–6535. [Google Scholar] [CrossRef]
- Hu, Q.; Shao, X.; Guo, L. Adaptive fault-tolerant attitude tracking control of spacecraft with prescribed performance. IEEE/ASME Trans. Mechatron. 2017, 23, 331–341. [Google Scholar] [CrossRef]
- Kumar, B.K.; Singh, S.; Srivastava, S. A decentralized nonlinear feedback controller with prescribed degree of stability for damping power system oscillations. Electr. Power Syst. Res. 2007, 77, 204–211. [Google Scholar] [CrossRef]
- Jin, Z.; Zhang, W.; Liu, S.; Gu, M. Command-filtered backstepping integral sliding mode control with prescribed performance for ship roll stabilization. Appl. Sci. 2019, 9, 4288. [Google Scholar] [CrossRef] [Green Version]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Lin, C.; Ma, Y. Adaptive neural consensus tracking for nonlinear multiagent systems using finite-time command filtered backstepping. IEEE Trans. Syst. Man, Cybern. Syst. 2017, 48, 2003–2012. [Google Scholar] [CrossRef]
- Dong, L.; Tang, Y.; He, H.; Sun, C. An event-triggered approach for load frequency control with supplementary ADP. IEEE Trans. Power Syst. 2016, 32, 581–589. [Google Scholar] [CrossRef]
- Guo, C.; Song, C.; Zhao, Y.J.; Wang, J.W. Nonlinear model predictive control for near-Space interceptor based on finite time disturbance observer. Int. J. Aeronaut. Space Sci. 2018, 19, 945–961. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description |
|---|---|
| PPFTC | Prescribed performance fault-tolerant control |
| LFC | Load frequency control |
| FTC | Fault-tolerant control |
| SMC | Sliding model control |
| PID | Proportional-integral- derivative |
| MIMO | Multi-input multi-output |
| ACE | Area control error |
| DO | Disturbance observer |
| MIPS | Multi-area interconnected power system |
| V2G | Vehicle-to-grid |
| HESS | Hybrid energy storage system |
| HDVC | High-voltage direct current |
| PPC | Prescribed performance control |
| CCF | Constrained command filter |
| Tie-line power synchronization coefficient | |
| Time constant of power system | |
| Time constant of governor | |
| Time constant of turbine | |
| Exchange power of tie-lie | |
| Governor valve positon | |
| Load disturbance | |
| Generator output power | |
| Power delivered by the HESS to Area i | |
| Power system gain | |
| Load frequency deviation | |
| Set value of frequency deviation | |
| Control error of the i-th area. | |
| Speed regulation gain | |
| Proportional feedback coefficient of frequency deviation |
| Area i | (s) | (s) | (Hz/p.u.Mw) | (s) | (Hz/p.u.Mw) | (s) | (Hz/p.u.Mw) | |
|---|---|---|---|---|---|---|---|---|
| 1 | 0.08 | 0.3 | 2.4 | 0.0707 | 120 | 20 | 0.425 | 1.1 |
| 2 | 0.072 | 0.33 | 2.7 | 0.0707 | 112.5 | 25 | 0.425 | 1.1 |
| 3 | 0.07 | 0.35 | 2.5 | 0.0707 | 125 | 20 | 0.425 | 1.1 |
| 4 | 0.085 | 0.375 | 2 | 0.0707 | 115 | 15 | 0.425 | 1.1 |
| Parameters | Values |
|---|---|
| DO parameters | |
| PPFTC parameters | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, D.; Zhang, W.; Li, J.; Yang, W.; Xu, D. Disturbance Observer-Based Prescribed Performance Fault-Tolerant Control for a Multi-Area Interconnected Power System with a Hybrid Energy Storage System. Energies 2020, 13, 1251. https://doi.org/10.3390/en13051251
Yu D, Zhang W, Li J, Yang W, Xu D. Disturbance Observer-Based Prescribed Performance Fault-Tolerant Control for a Multi-Area Interconnected Power System with a Hybrid Energy Storage System. Energies. 2020; 13(5):1251. https://doi.org/10.3390/en13051251
Chicago/Turabian StyleYu, Dong, Weiming Zhang, Jianlin Li, Weilin Yang, and Dezhi Xu. 2020. "Disturbance Observer-Based Prescribed Performance Fault-Tolerant Control for a Multi-Area Interconnected Power System with a Hybrid Energy Storage System" Energies 13, no. 5: 1251. https://doi.org/10.3390/en13051251