1. Introduction
In recent years, as one of the effective technical means to solve the new energy grid-connection and accommodation, flexible DC transmission technology has become a hot topic of academic research [
1,
2,
3]. Multi-terminal flexible DC transmission can meet the demand of multi power supply and receiving, and effectively reduce the number of converters. The half bridge submodule modular multilevel converter (MMC) topology is often used in the existing flexible DC grid projects. In the DC grid, the short circuit fault is a serious problem, among which the pole-to-pole short circuit is the most serious fault type [
4,
5,
6,
7]. When the DC side of the converter with MMC topology has a short circuit fault, the submodule capacitor will discharge through the fault point, which will cause a great impact on the MMC converter and other DC system equipment, seriously endangering the safe and stable operation of the DC system. Therefore, it is very important for the safe and stable operation of flexible DC transmission to install DC fault current limiter (FCL) and direct current circuit breaker (DCCB) on the DC side to realize the fast current limiting and blocking of the DC fault [
2].
When designing the parameters of the fault protection system, it is required that the high-voltage DC circuit breaker cut offs the short-circuit current under the most extreme fault of the DC system [
8,
9,
10,
11]. Therefore, it is necessary to complete the analysis of the short-circuit fault characteristics of the DC system including the DC circuit breaker, realize the parameter capacity matching of the converter, the FCL and the DCCB, and improve the reliability and economy of the system operation. At present, the types of DC circuit breakers studied mainly include the mechanical type, solid-state type, and hybrid type. Since the hybrid DCCB has the advantages of low on-state loss of the mechanical circuit breaker and fast breaking of the solid-state circuit breaker, hybrid DCCB has become the main research direction of the circuit breaker [
1,
2,
3]. Therefore, the calculation and analysis of the short-circuit fault current in this paper is based on hybrid DCCB.
At present, most of the researches on DC circuit breakers focus on the new topology design [
12,
13,
14,
15], breaking characteristics [
16,
17,
18,
19,
20], and suppression mechanism [
21,
22,
23,
24]. Some other researchers focus on the short-circuit current analysis. In the MMC-HVDC system, [
25] deduced the analytic equation for single terminal MMC pole-to-pole fault current calculation. In addition, the single terminal MMC arm fault current before and after the converter blocked during a pole-to-pole fault was analyzed in [
25]. However, the detailed DC-side fault current calculation of a DC grid has to solve the electrical coupling problems because all the converter capacitors discharging at the same time in a meshed network. The DC-side fault analysis and characteristics of two-level VSC and MMC based multi-terminal DC systems are proposed in [
26,
27,
28] respectively. However, the proposed solution for obtaining the DC grid fault currents is by electromagnetic transient (EMT) simulations. However, the EMT models of the entire DC grid are usually quite time consuming especially for the grid with multiple MMC converters. Meanwhile the DCCB model is not considered in the whole calculation and analysis process. Li, C [
29] deduces the mathematical modeling of the multi-terminal flexible DC system based on MMC, and the current analytical formula of the multi-terminal flexible DC system under the pole-to-pole short circuit fault is derived. Although the transient stability analysis of the DC system with DCCB under the short circuit fault is mentioned in the simulation, the detailed mathematical model and combined calculation process of the DC circuit breaker are not given.
The equivalent models of different transfer branches of hybrid DC circuit breakers are quite different in DC lines, so it is necessary to combine the external characteristics of DCCB into the short-circuit fault analysis of multi-terminal DC systems. There are few short-circuit fault analysis that takes the external characteristics of DC circuit breakers into account in the multi-terminal DC system. Even if some scholars will add the circuit breaker model to the short circuit calculation process, they only equivalent it to a simple switch model, which is no longer applicable to the hybrid DC circuit breaker, which has undergone switching of multiple transfer branches during the breaking process.
In order to solve the above problems, this paper proposes a short circuit calculation and analysis method of four-terminal flexible DC system including cascaded full bridge hybrid DCCB, which provides theoretical basis for the design of DC system protection control strategy and the parameter setting of DCCB, DC FCL, and other related protection equipment.
Firstly, the commutating process of cascaded full bridge hybrid DC circuit breaker is analyzed, and the equivalent circuit of different transfer branches is obtained. Then, the mathematical model of MMC-HVDC system with DCCB is established. Aiming at the different time sequence equivalent model of DC circuit breaker, the corresponding matrix parameter equation of the short-circuit process is given, and the calculation method of the short-circuit current of the whole process system considering the DC circuit breaker is proposed. By comparing the transient simulation and short circuit calculation results of the four-terminal DC system, the correctness of the whole process short circuit calculation method is verified. On this basis, according to the short circuit calculation equation, the configuration method of the DC circuit breaker parameters is given, which can be further extended to multi-terminal DC system.
2. Equivalent Circuit of Cascade Full Bridge Hybrid DCCB
The cascaded full bridge hybrid DCCB is proposed by the State Grid Corporation of China [
3]. Fault transfer branch realizes the voltage level improvement through the series connection of full bridge submodules, avoiding the problem of voltage sharing of switching devices caused by the direct series connection of IGBTs. Therefore, this paper takes this DC circuit breaker topology as an example to calculate and analyze the short-circuit of four-terminal DC grid, and other hybrid DCCB topologies are also applicable.
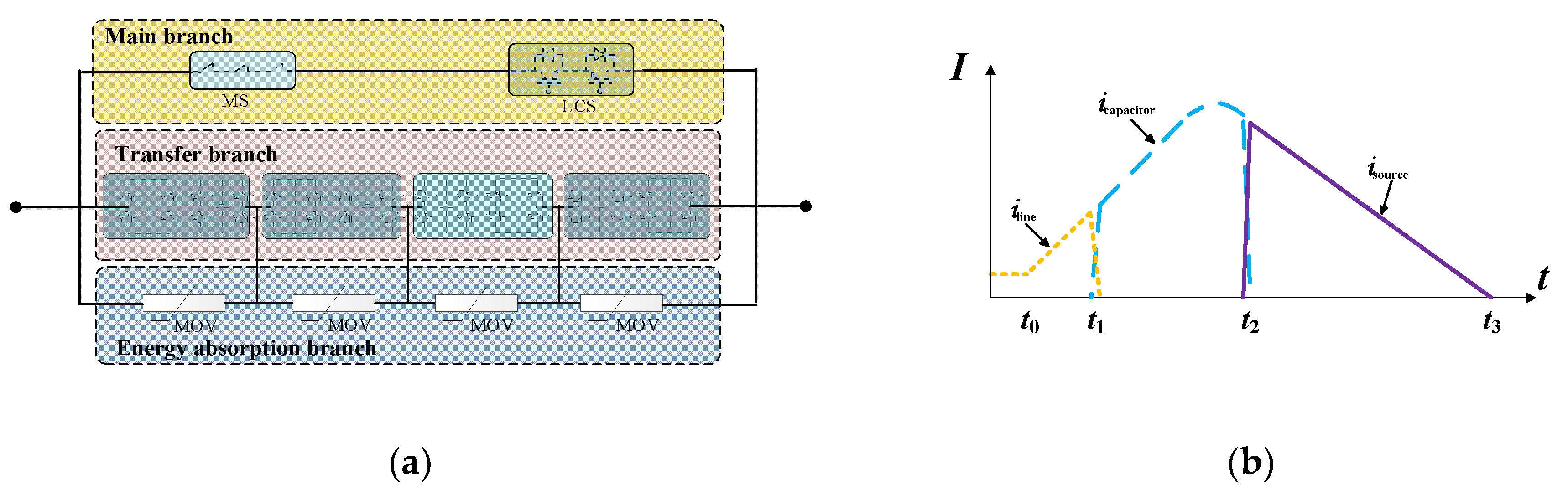
Figure 1a,b are the topological structure and current breaking process diagram of cascaded full bridge hybrid DCCB respectively.
In
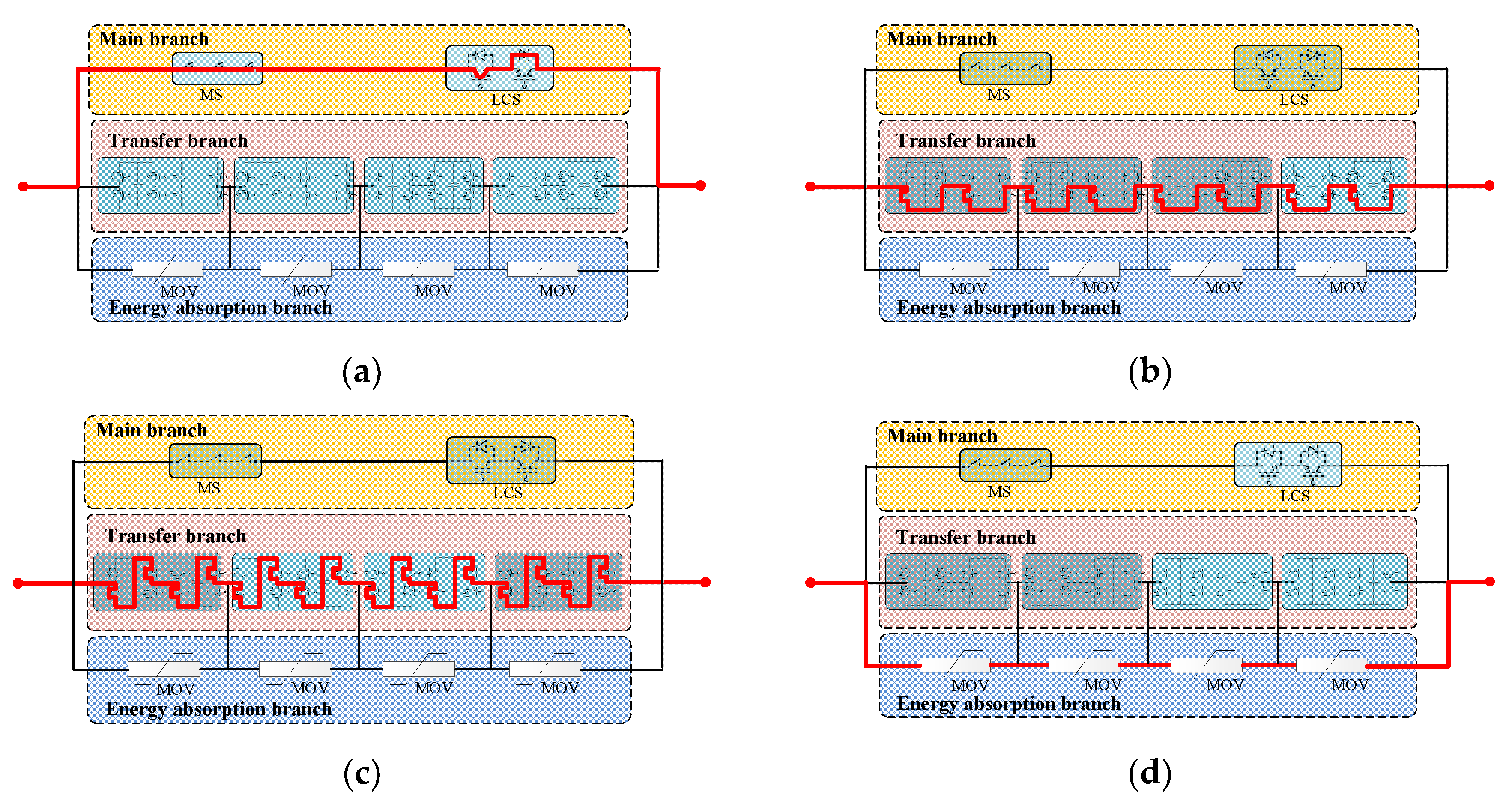
Figure 1a, the current flows through the main branch (MB), including the mechanical switch (MS) and load current switch (LCS) under the rated working condition. At this time, the main branch is equivalent to the impedance accessing line, as shown in
Figure 2a (the impedance value is very small and can be ignored). At t
0 moment, when the line occurs short-circuit fault, the DCCB remains in the working state as shown in
Figure 2a before receiving the breaking command. After receiving the breaking command, the two down IGBTs of full bridge submodule of the transfer branch are closed, the load current switch is open, and the fault current is transferred to the transfer branch (TB), as shown in
Figure 2b. At this time, the circuit breaker is still equivalent to the impedance (negligible). At t
1 time, when the mechanical switch of the main branch is completely disconnected, the two down IGBTs of the full bridge submodule of the transfer branch is disconnected, and the fault current is the charging of the submodule capacitor. At this time, the circuit breaker is equivalent to the capacitor (the initial voltage of the capacitor is zero), as shown in
Figure 2c. At t
2 time, when the capacitor voltage of the submodule reaches the clamping voltage of the metal oxide varistor (MOV), the fault current is transferred to the energy absorption branch (EAB), as shown in
Figure 2d. The energy absorption region should be in the linear region in the metal oxide varistor I-V characteristic curve [
30], which means the energy absorption circuit can be equivalent to a DC voltage source connected in series to the circuit during this time. Therefore, in
Figure 1b, t
0–t
1 time, the circuit breaker was equivalent to the impedance. At t
1– t
2 time, the circuit breaker was equivalent to the capacitor. At t
2–t
3 time, the circuit breaker was equivalent to the DC voltage source.
3. Equivalent Circuit of the Four-Terminal Bipole MMC DC System
This paper mainly analyzed the pole-to-pole short-circuit fault, because the pole-to-pole short-circuit fault is the most serious fault type of the DC side in the multi-terminal DC transmission system, and it is also the key factor to consider the breaking capacity of DCCB [
28].
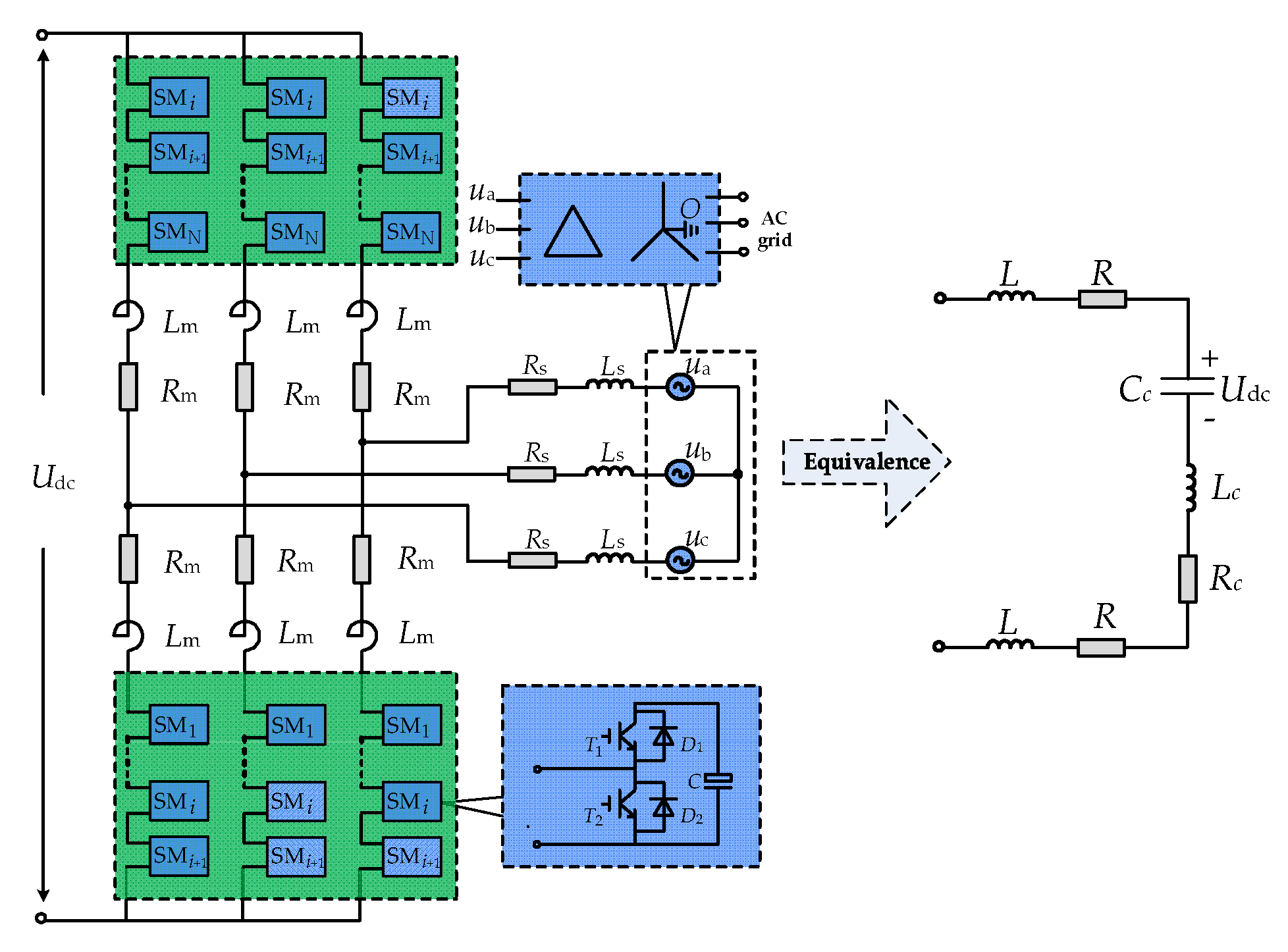
Figure 3 shows the basic structure of the typical three-phase MMC and half bridge submodule model. The converter of each pole is composed of three-phase six arms, each arm is composed of N submodules (SM) and an arm inductor Lm in series. If
Rc,
Lc, and
Cc are used to represent the equivalent resistor, inductor and capacitor of MMC converter, the equivalent discharging circuit of the MMC converter as shown in
Figure 3 can be obtained.
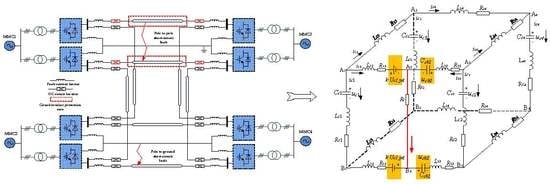
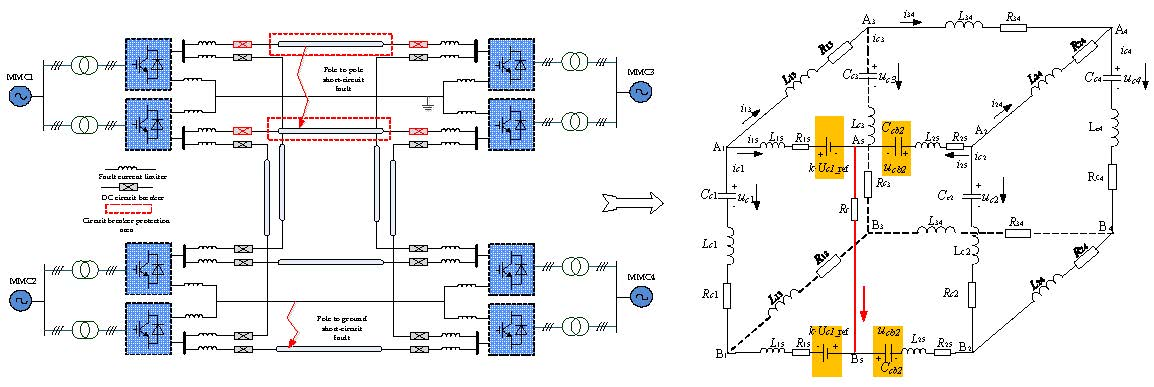
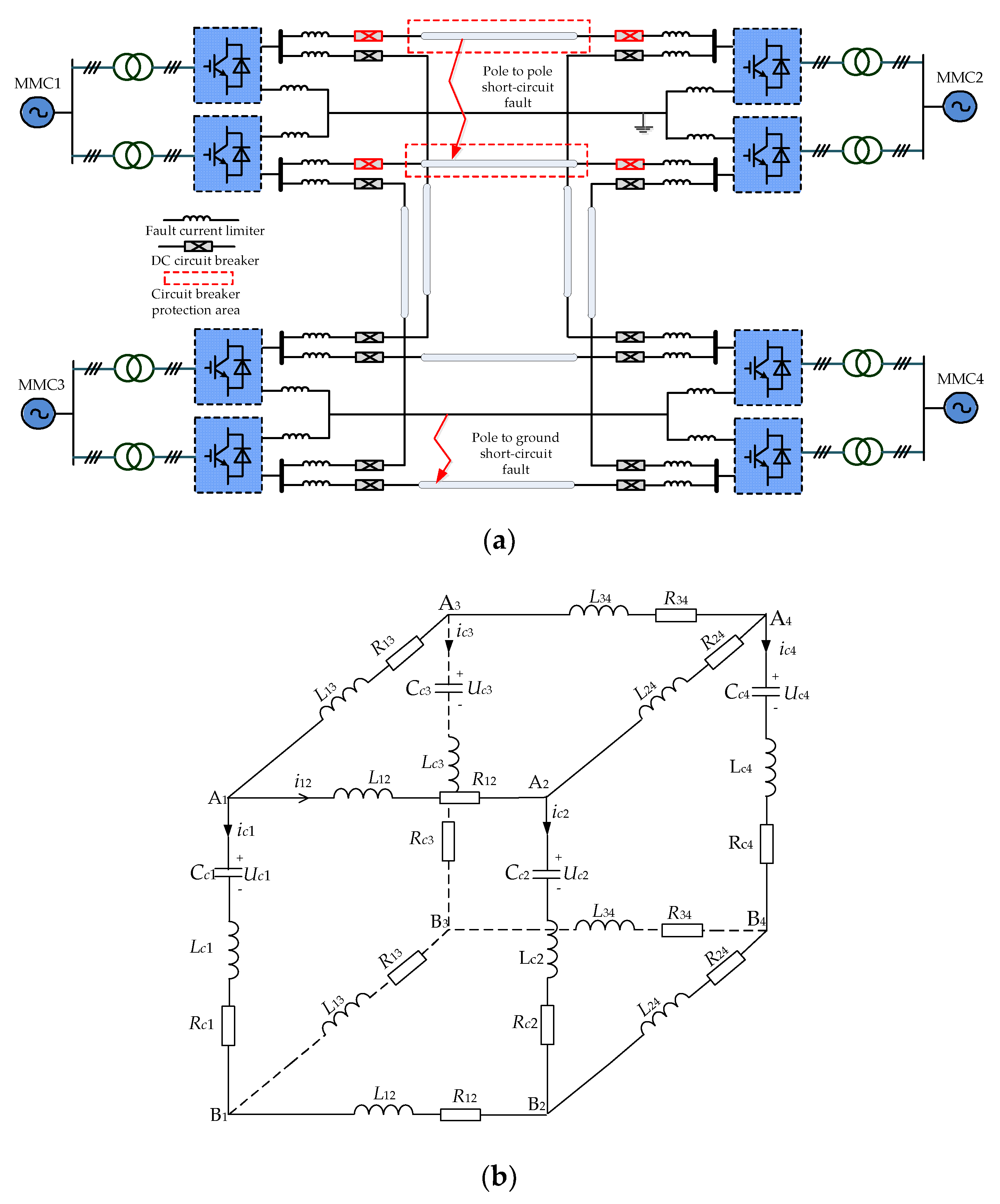
The schematic diagram of the four-terminal bipole MMC DC system with DCCB is shown in
Figure 4a. The four-terminal ring topology structure was adopted, and two rectifier stations and two inverter stations were set in total. The DC side was the bipole structure.
In order to limit the rising rate of the fault current, a DC FCL is needed on the DC side. For the four-terminal DC grid, two configuration schemes of DC FCL are often used, which are centralized scheme and decentralized scheme [
4,
6,
23]. The decentralized scheme is more conducive to limit the speed of fault expansion, and is suitable for different fault positions in the line. Therefore, in
Figure 4a, the decentralized FCL was adopted, and both ends of each line were equipped with current limiting inductors. According to the four-terminal MMC system circuit in
Figure 4a and the
Figure 3 MMC discharge model, the four-terminal ring network equivalent model with the DC circuit breaker was obtained, as shown in
Figure 4b.
4. Short Circuit Current Calculation of the Four-Terminal MMC System with DCCB
In order to analyze the influence of DCCB on the whole system, the equivalent model of a different breaking process of DCCB should be combined. DC circuit breakers are installed at both ends of each line. As shown in
Figure 4a, both positive and negative poles of MMC
1 and MMC
2 are installed at the same time. When a short-circuit fault occurs on one side of the system, the circuit breakers on both sides of the fault point start to break at the same time after receiving the short-circuit fault command, and the positive and negative circuit breakers close to the same converter have the same action process. Due to the line impedance, the breaking action of the circuit breakers on both sides of the fault point is not completely consistent. Taking the DCCB between the A
1A
2 line and B1B2 line in
Figure 4b as an example, the short circuit point is close to the A1B1, and the short circuit calculation model can be theoretically divided into the following 8 types (CB
1 is the left circuit breaker at the fault point, which is the near circuit breaker; CB
2 is the right circuit breaker at the fault point, which is the remote circuit breaker.), as shown in
Table 1.
Note: the state of O indicates that the circuit breaker works at
t0–
t1 in
Figure 1b, and the impedance is the equivalent of the circuit breaker; the state of C indicates that the circuit breaker works at
t1–
t2 in
Figure 1b, and the capacitor is the equivalent of the circuit breaker; the state of S indicates that the circuit breaker works at
t2–
t3 in
Figure 1b, and the DC source is the equivalent of the circuit breaker; the state of B indicates that the circuit breaker is completely disconnected and the current drops to zero.
This paper considered that when the fault occurs, the breakers at both ends of the fault line would receive the breaking command at the same time and start to break. It should be noted that the breaking command is from the fault detection algorithm, and the fault detection algorithm depends on real-time monitoring. The paper’s short-circuit current calculation could be used as a reference value for the fault detection algorithm. By means of adjusting the current protecting value of the fault detection algorithm, the breaking command can be obtained rapidly.
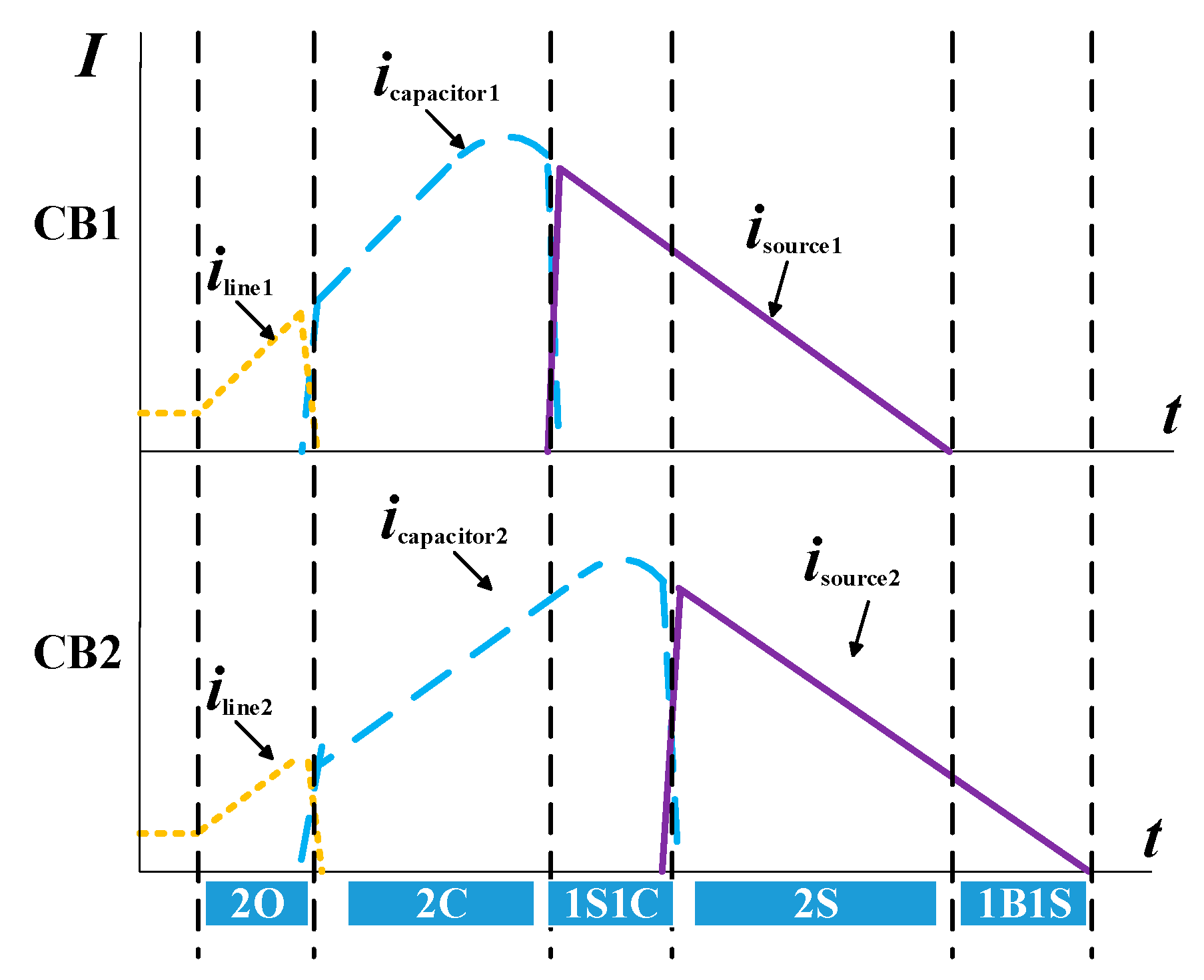
In the normal operation of the four-terminal flexible DC system, the equivalent circuit of each DC line is in the stage of 2O. When the system detects the fault and sends the breaking command to the DC circuit breakers at both ends, CB
1 and CB
2 start to break at the same time, and the fault current is transferred from the main branch to the submodule switching device branch at the same time, that is, from
Figure 2a to
Figure 2b. At this time, the system equivalent model is still in the state of 2O. Since CB
1 and CB
2 wait the same time for the mechanical switch to break completely, CB
1 and CB
2 switch to the capacitor branch of the submodule at the same time, that is to say, they switch from
Figure 2b to
Figure 2c. At this time, the system equivalent model is still 2C. Due to the small impedance between CB
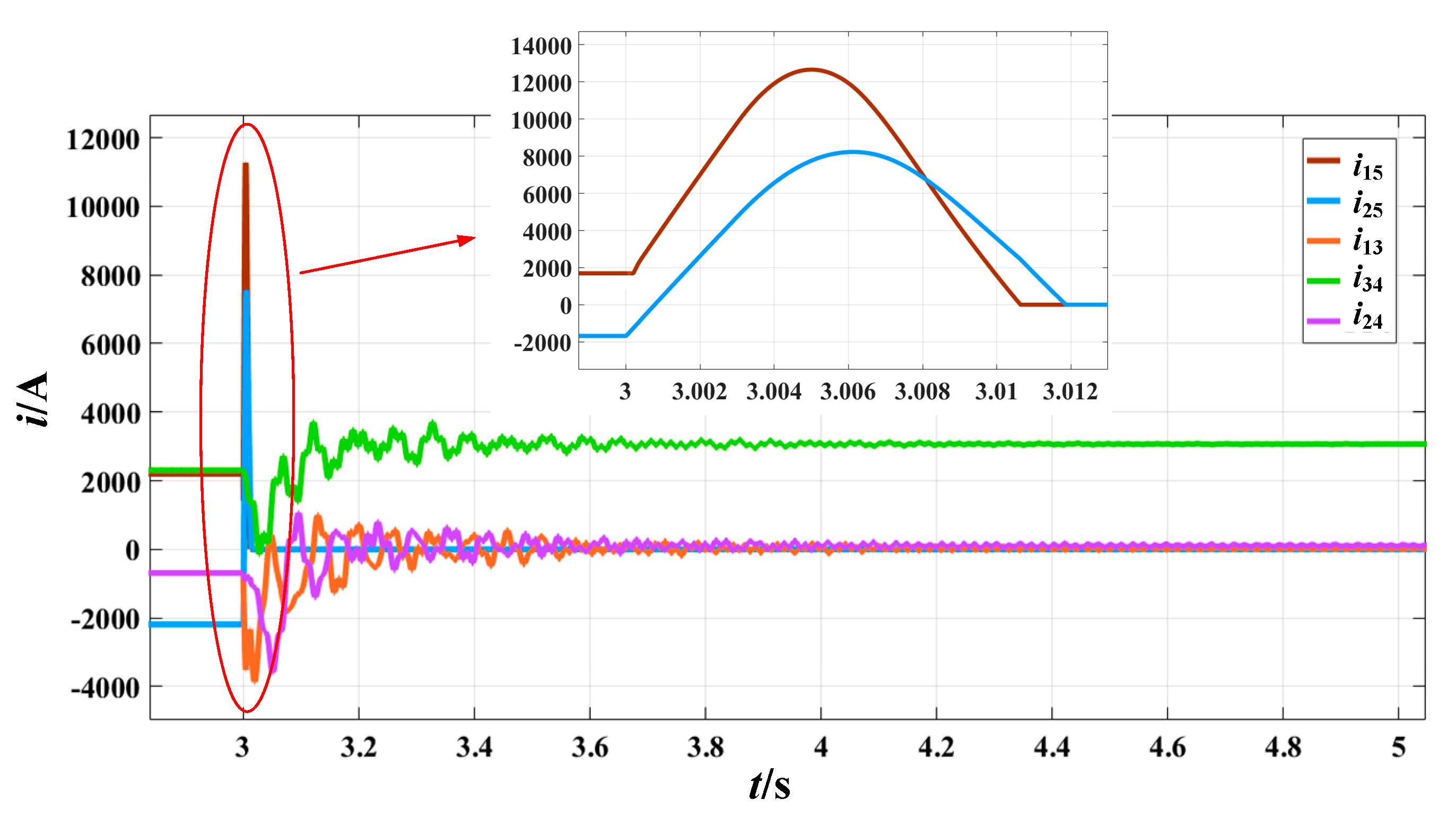
1 and the fault point, the current rise rate is high. Therefore, CB
1 takes the lead in transferring the current to the energy absorption branch under the same clamping voltage of the MOV. At this time, the system equivalent model is 1S1C. When the capacitor of CB
2 submodule reaches the clamping voltage of arrester, the current of two circuit breakers works in the energy absorption branch, and the system equivalent model is the state of 2S. Compared with the remote circuit breaker CB
2, the near circuit breaker CB
1 takes the lead in the stage of an equivalent DC source, and then completes the breaking of the fault current ahead of time. At this time, the system equivalent model is 1B1S. The fault isolation of MMC
1-MMC
2 is realized with the fault breaking of circuit breakers at both ends. Then the equivalent circuit of the four-terminal system after the near MMC1 fault has gone through five stages: 2O-2C-1S1C-2S-1B1S. The simplified diagram is shown in
Figure 5.
In the following, equivalent circuit modeling and short circuit calculation analysis were carried out for the above five cases respectively.
4.1. No Action of CB1 and CB2 (Step:2O)
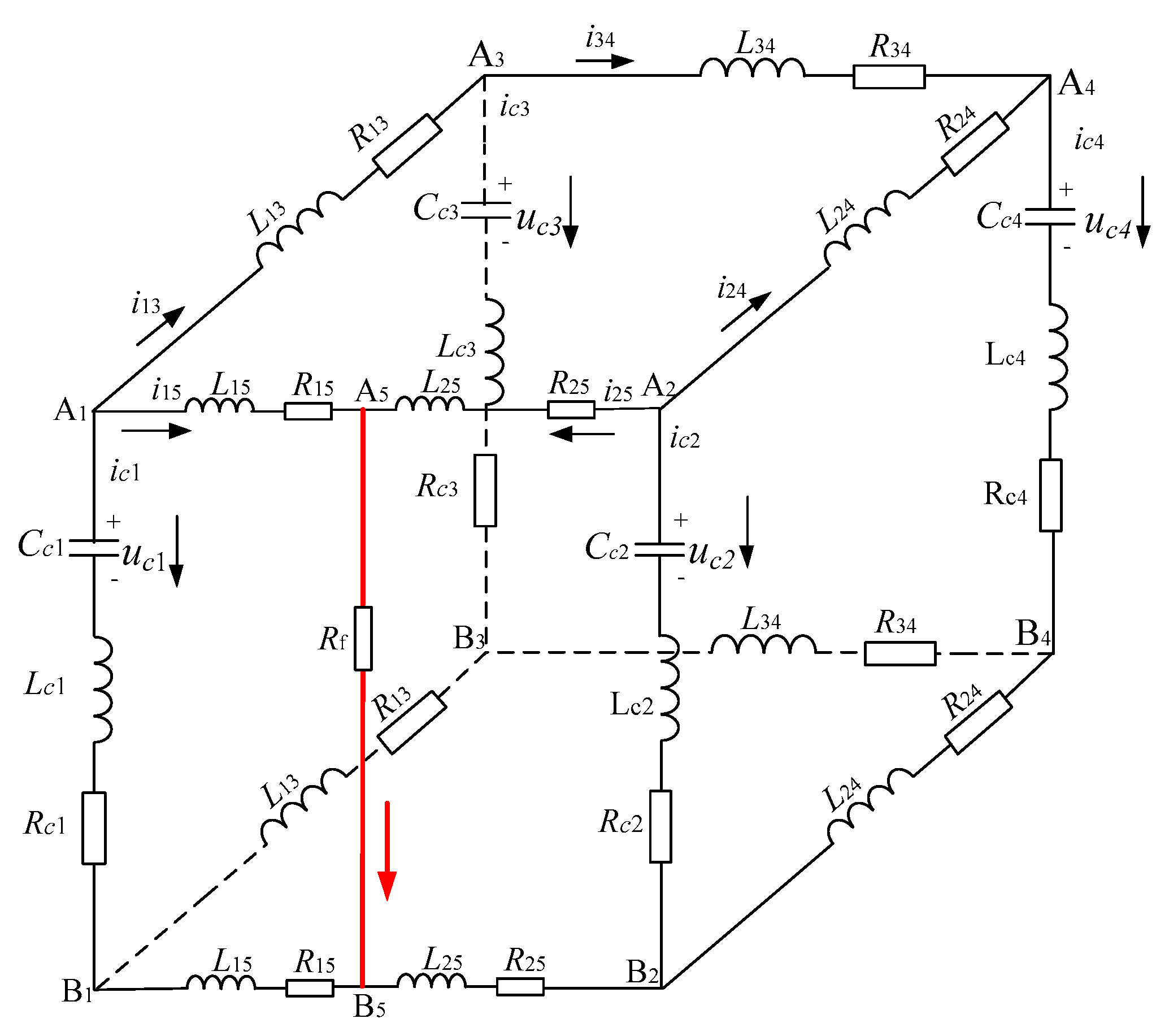
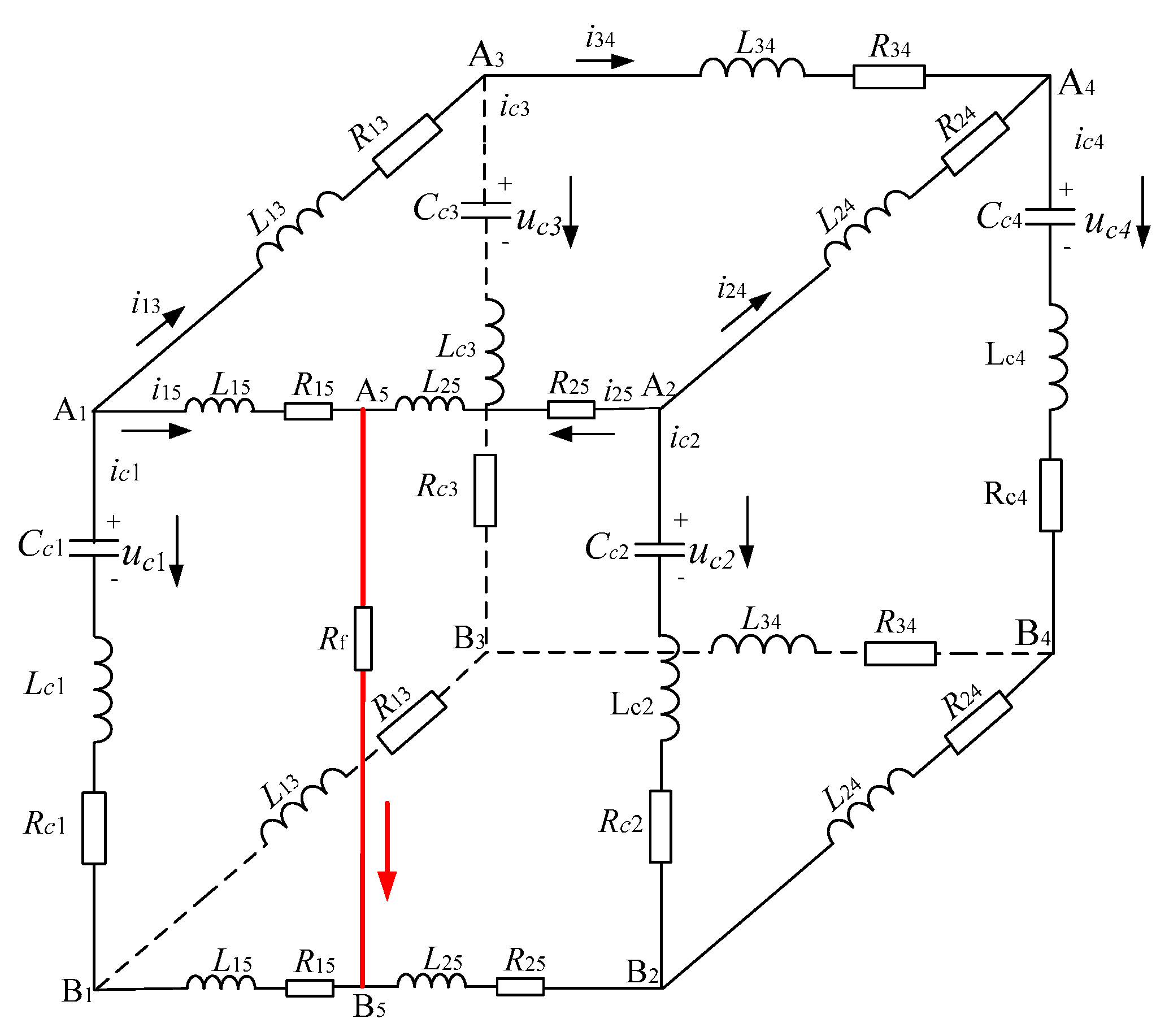
Assuming that at
t0, the pole-to-pole short circuit fault occurs at A
5 between A
1 and A
2 converter stations, the original A
1A
2 branch is divided into two parts. At this time, the circuit breaker has not yet operated, and the equivalent circuit of the system pole-to-pole fault is shown in
Figure 6.
After the pole-to-pole short-circuit fault occurs in the system, the four side loops of the original model are divided into five loops by the short-circuit fault branch A
5B
5. The KVL equation can be obtained:
According to KCL, each converter currents are obtained:
Combining (2) to (1) yields:
Combing (3) to (4) yields:
Therefore, the matrix shown in (3) can be written as:
where,
A0 is the voltage correlation matrix of converter,
R0 is the circuit resistance matrix and
L0 is the circuit inductor matrix. The matrix expressions are:
So far, the parameter matrixes of the four-terminal ring network MMC equivalent mathematical model to calculate the short-circuit current under the pole-to-pole short-circuit fault are shown. According to Equation (5) and MMC capacitor differential equation, the final system simultaneous differential equation is obtained:
where
C is the equivalent capacitor matrix of each converter as:
As shown in
Figure 1b, this equivalent circuit duration is
t0–
t1. According to the rated operation state of the system, the initial conditions of each variable in
Figure 6 can be obtained. According to the differential equation of Equation (9), the state at t1 can be solved as the initial conditions for the system to the next state.
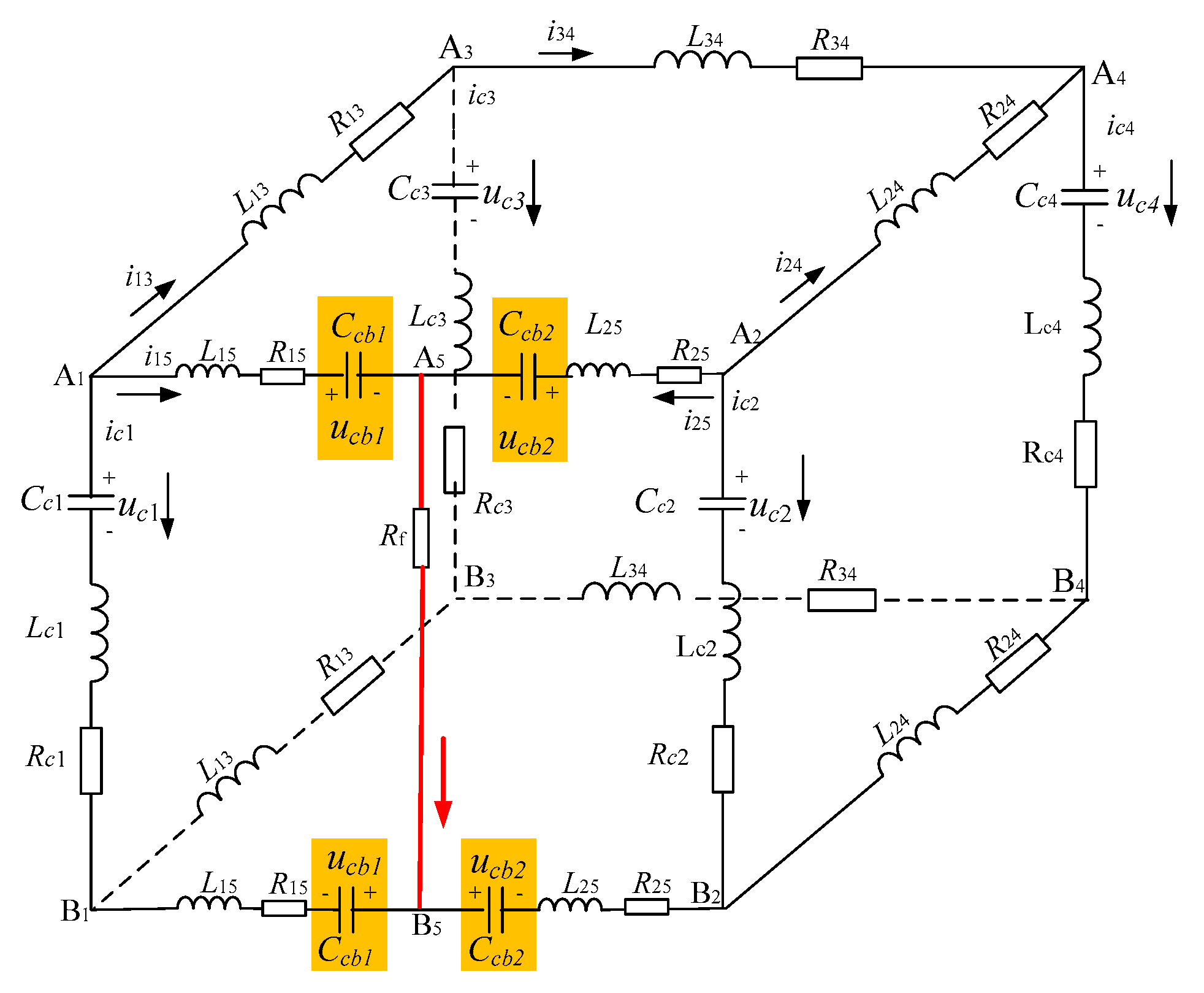
4.2. The Capacitor Equivalent State of CB1 and CB2 (Step:2C)
Since the CB
1 and CB
2 responds to the breaking command at the same time, in theory, the CB
1 and CB
2 at both ends of the fault point transfer to the submodule capacitor branch of the transfer branch at the same time. The CB
1 and CB
2 are equivalent to capacitors connected in series to the line, and the system equivalent circuit is shown in
Figure 7. The final state in the state of 2O is the initial state of the system at this time. Similarly, according to KVL and KCL, the differential equations of the system in this state are obtained:
where:
Since the fault point is close to the MMC1 converter (A1B1) and the fault current rise rate is high, the CB1 current is transferred to the energy absorption branch first, while CB2 still maintains the submodule capacitor branch.
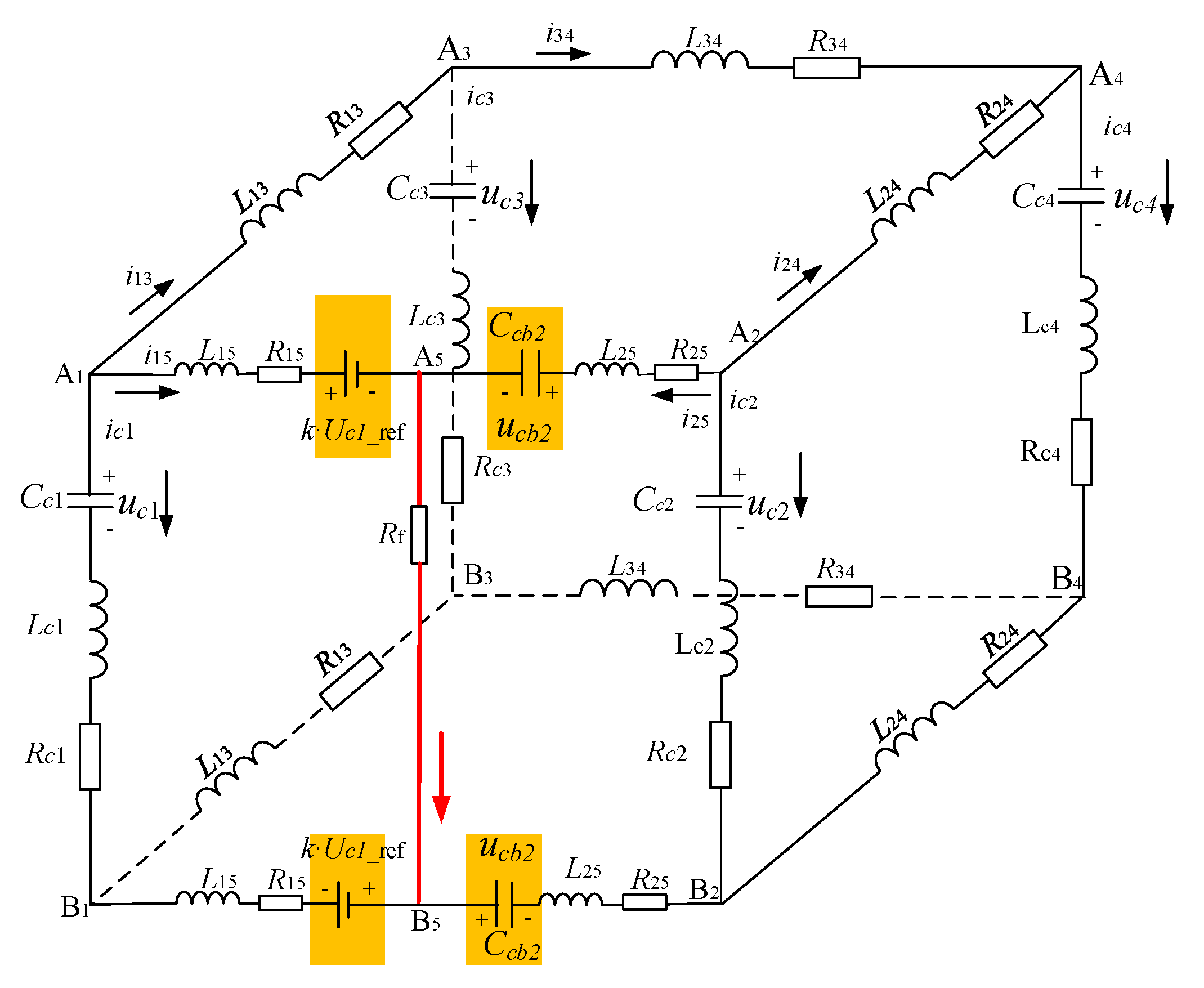
4.3. The DC Source Equivalent State of CB1 and the Capacitor Equivalent State of CB2 (Step:1S1C)
Equivalent circuit of the system in which the CB
1 present DC source state and CB
2 present capacitor state are shown in
Figure 8, where
k·
Uc1_ref represents the clamping voltage of MOV. According to KVL and KCL, the differential equations of the system in this state are also obtained:
where:
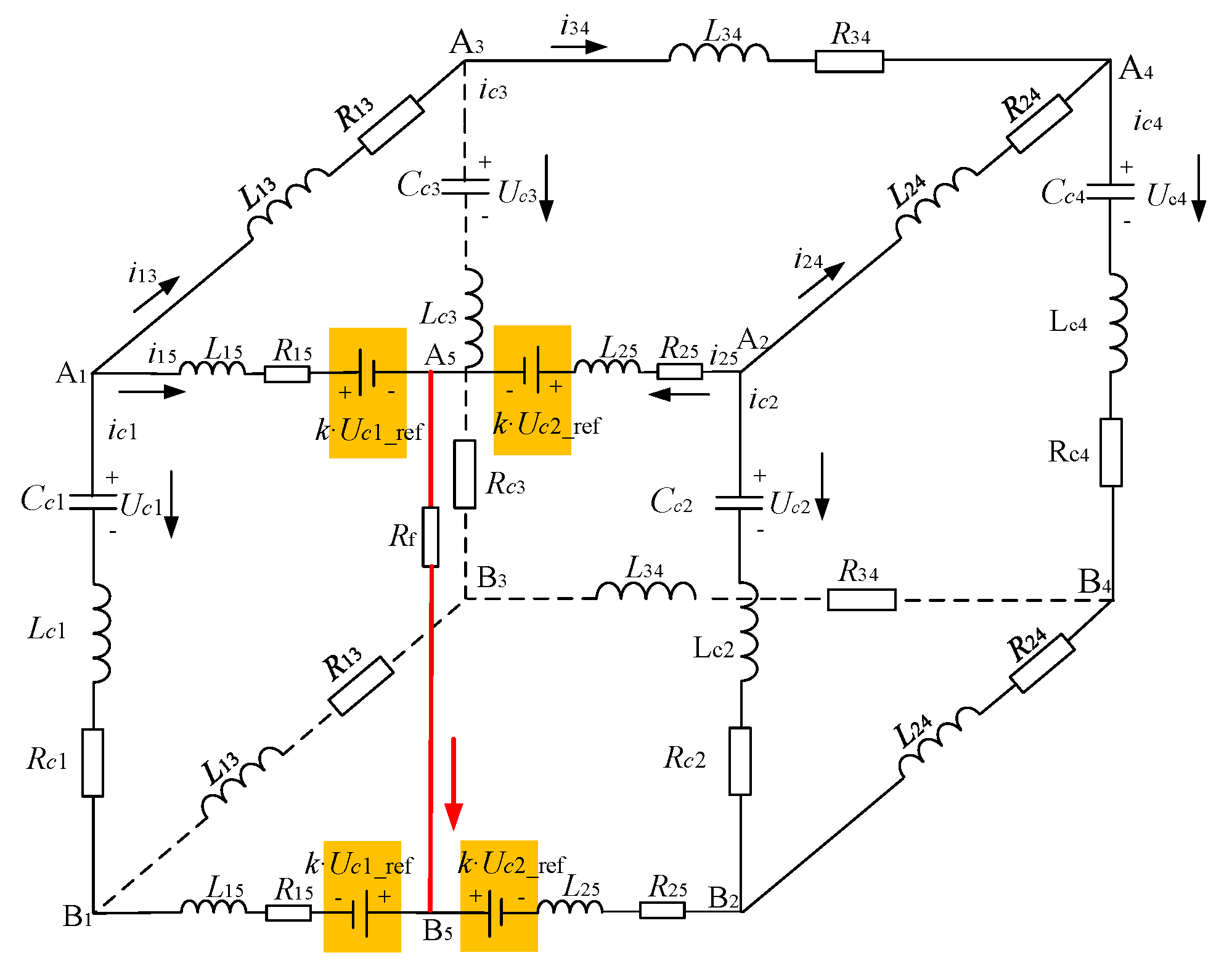
4.4. The DC Source Equivalent State of CB1 and CB2 (Step:2S)
When CB2 current is transferred to the energy absorption branch, CB
1 and CB
2 are equivalent to DC source at the same time, as shown in
Figure 9. At this time, the system differential equation is as shown in Equations (17) and (18):
where:
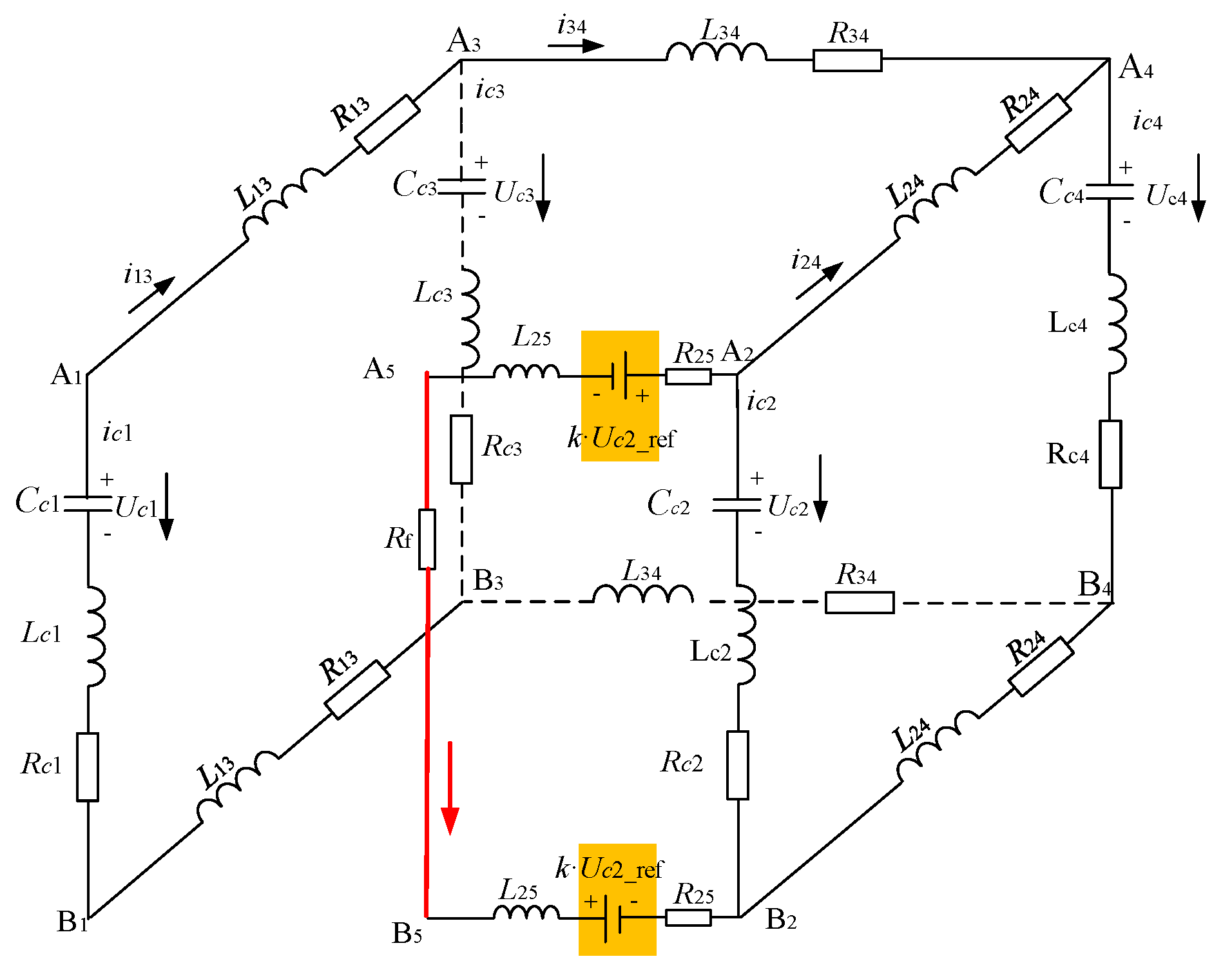
4.5. The Breaking Equivalent State of CB1 and the DC Source Equivalent State of CB2 (Step:1B1S)
When the CB
1 current drops to zero, the fault is completely broken. At this time, the CB
2 current is still in the energy absorption branch, as shown in
Figure 10. At this time, the system differential equation is as follows:
where:
4.6. Energy Absorption Power
The energy absorption power calculates is an important part of short circuit calculation. This part will take the DCCB at the MMC1 terminal as an example to calculate the energy absorption of the MOV.
During the energy absorption procedure, the energy absorbed by the MOV is mainly from two aspects: the energy storage of the fault line equivalent inductor and the energy injected by the MMC converter [
31]. When the fault loop resistance is ignored (only the metallic short circuit fault is considered), the expression of
Ear is as follows:
Here,
Ipeak is the peak value of current flowing through DCCB and
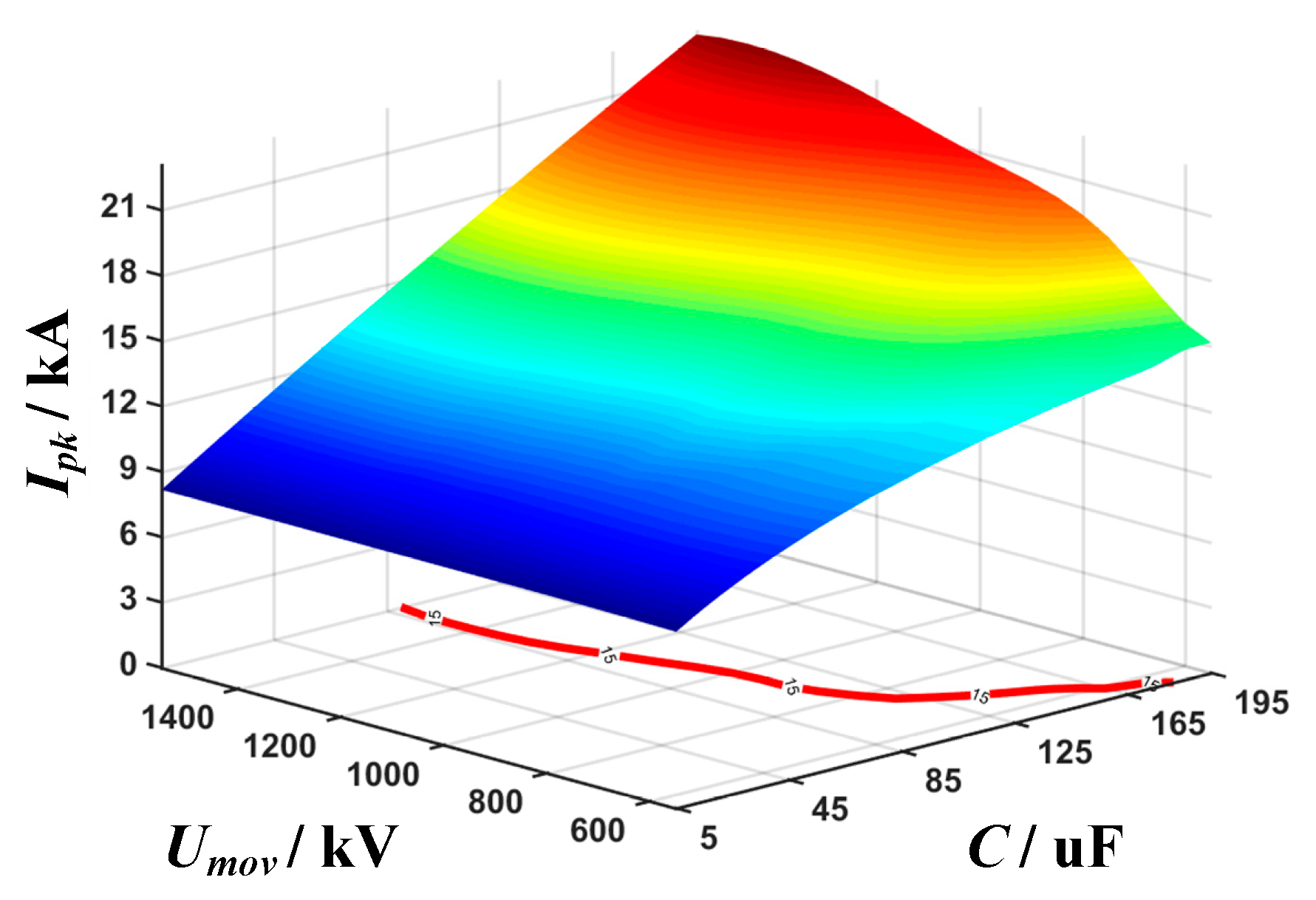
Tm is the energy absorption time of MOV. The first item on the right side of Equation (23) is the energy injected by the DC power supply in the fault circuit. The second item on the right side of Equation (23) is the energy storage in the DC line of the fault circuit. During the energy absorption procedure, the voltage at both ends of the MOV is approximately the constant clamping voltage (the protection level of the MOV), which is
k times of
Uc1_ref. As a result, the fault current reducing rate is:
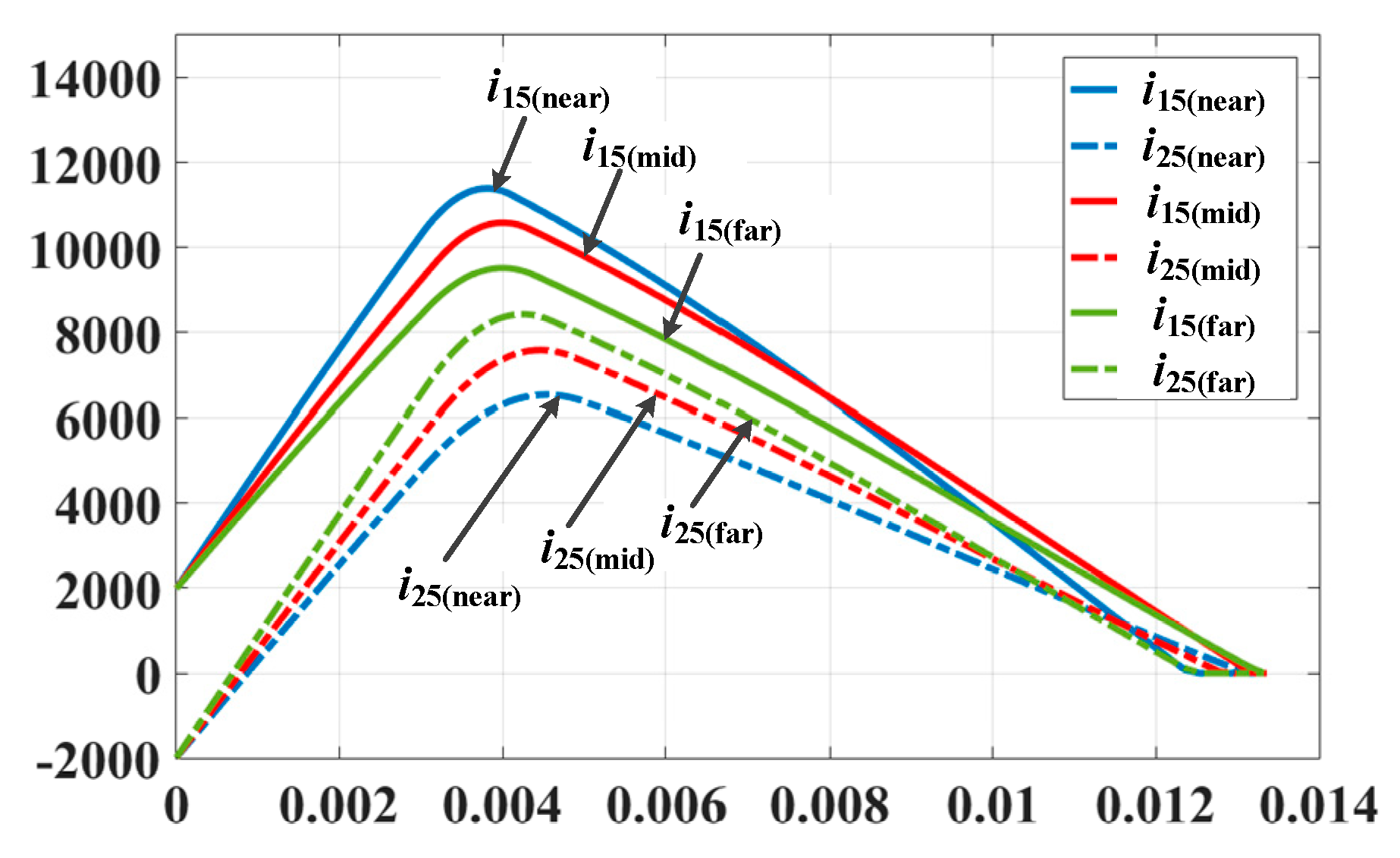
During energy absorption, the
i15 can be expressed as:
Let
i15 in Equation (25) be equal to zero, the time when the fault current drops to zero is obtained as:
By substituting Equation (23) into (25), we can get the
Emov expression of the energy absorption of the surge arrester as:
6. Application and Achievement
The aforementioned MMC four-terminal ring DC transmission system contains four MMC converters. In the other DC transmission system, this short-circuit fault current calculation method is still adaptive. In some application scenes, there are constant power loads. If the DC voltage is constant, the power loads is equivalent to the constant current source or resistor.
Figure 18 shows the equivalent circuit if one of the four stations is the constant current source.
The short-circuit fault current calculation equations are as follow:
According to KCL, each converter currents are obtained:
Combining (28) to (27) yields:
Combining (29) to (30) yields:
Therefore, the matrix shown in (30) can be written as:
where,
A0 is the voltage correlation matrix of converter,
R0 is the circuit resistance matrix, and
L0 is the circuit inductor matrix. The matrix expressions are:
Equations (28)–(35) give the short fault matrix equations of another example. Considering the different transferring process of DCCB as show in
Figure 2, the overall short-circuit process could be obtained. That means in a different DC transmission system, especially the MMC DC system, this method still can be extended.
The significance of this paper was offering the short-circuit fault current calculation method considering the DC circuit breaker, and the main achievements were as follows:
The commutating process of DC circuit breaker was analyzed, and the equivalent circuit of different transfer branches was obtained.
Combining the different transfer branches of DCCB, the short-circuit matrix equations was obtained and analytical values of system current and voltage of the whole DC system were acquired.
This method not only could be used in the multi-terminal ring DC system, but the multi-terminal DC system and point-to-point DC system were still applicable. Meanwhile, the DC source could be the MMC converter, DC current source, and power load.
The results of the short-circuit fault current calculation could be used to the DC circuit breaker parameters design, MMC converter protection design, and the DC system protection design.
7. Conclusions
In this paper, a method for calculating the fault current of the multi-terminal ring DC grid with a DC circuit breaker was proposed. According to the external characteristics of different branches of the hybrid DC circuit breaker, the equivalent model of each branch was obtained. For the MMC four-terminal ring DC transmission system, the equivalent mathematical model of the system under the fault was given. Combined with the equivalent models of different branches of the DC circuit breaker, the short circuit current calculation of the four-terminal MMC DC system considering the DC circuit breaker was completed.
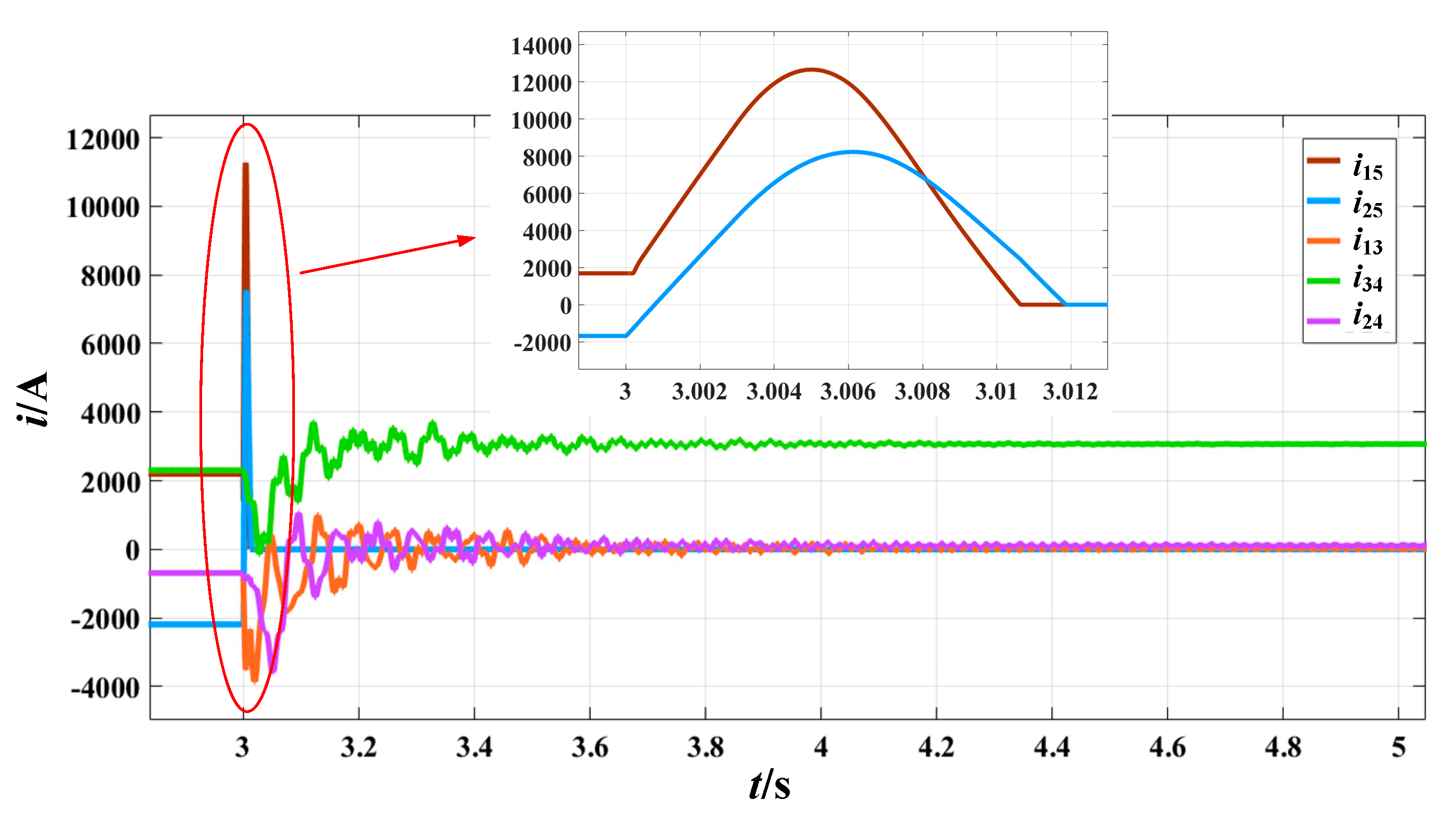
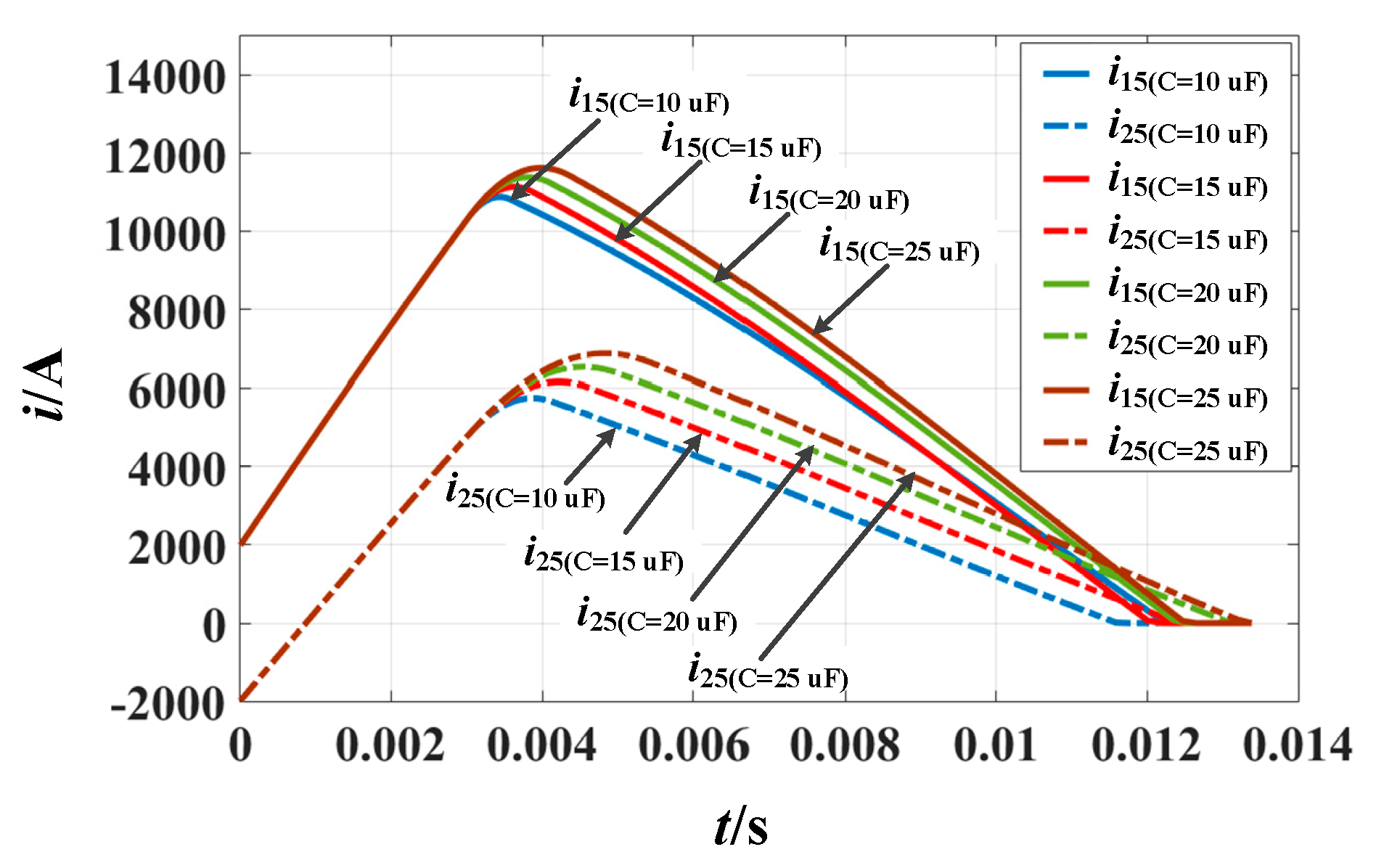
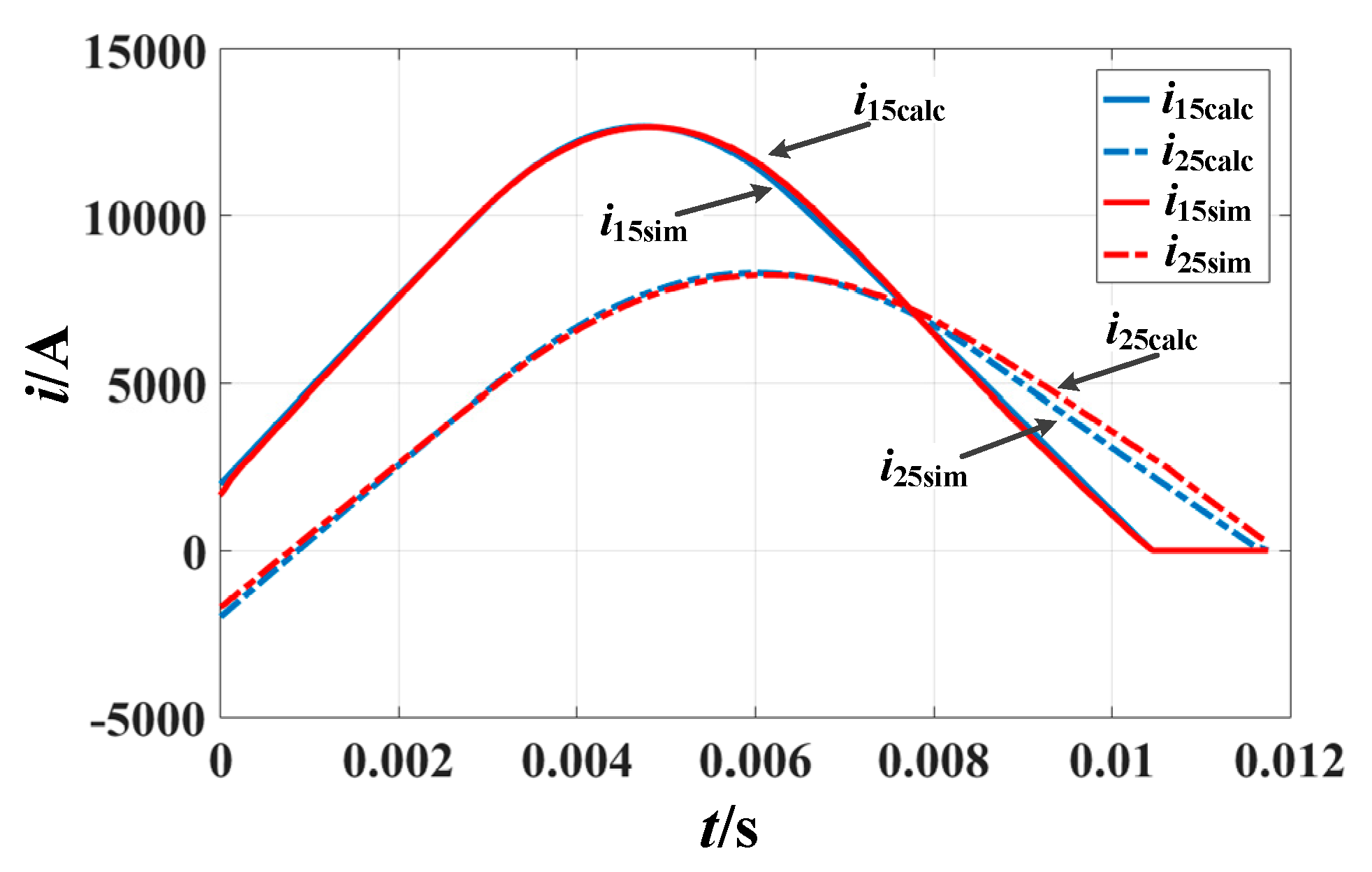
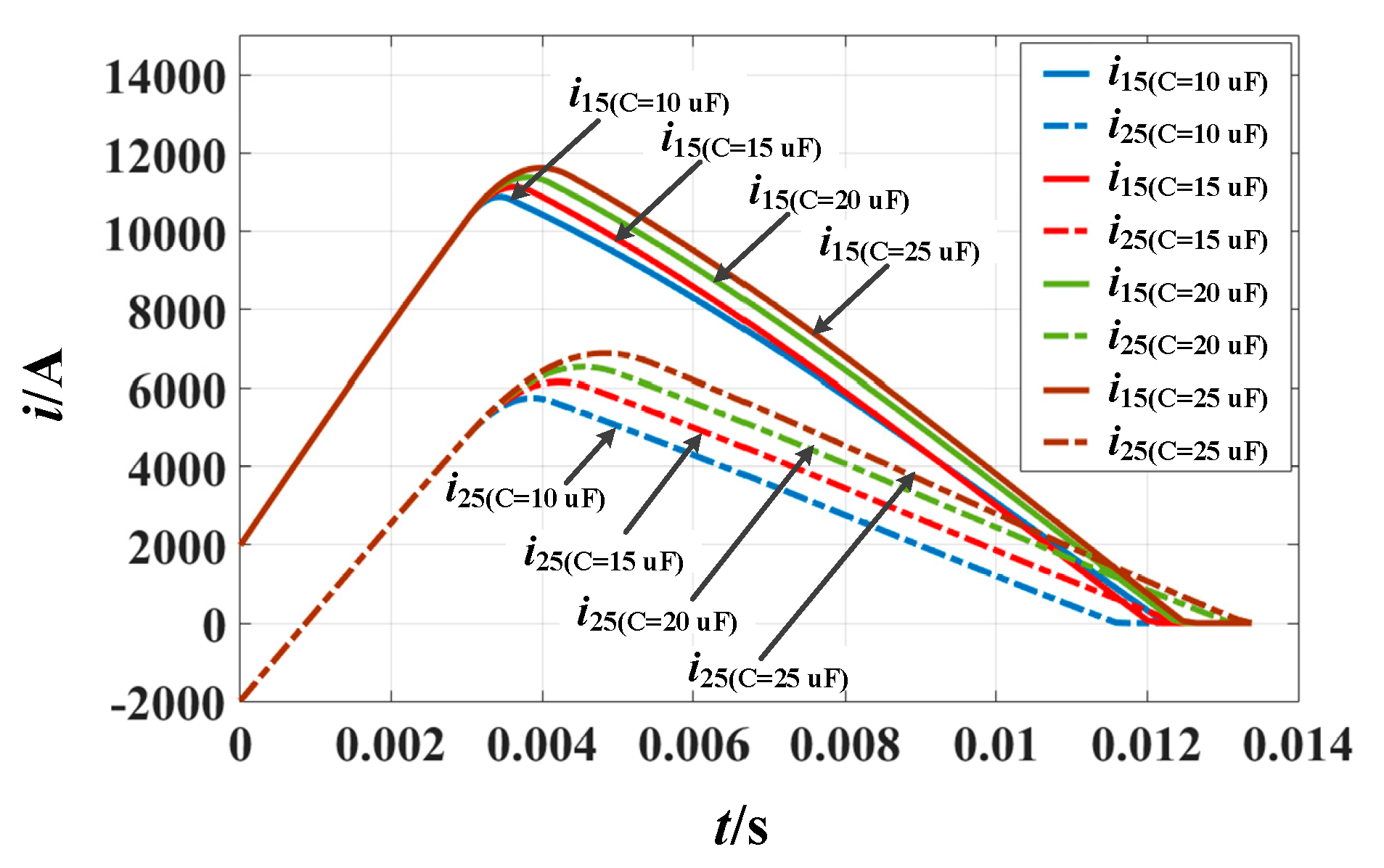
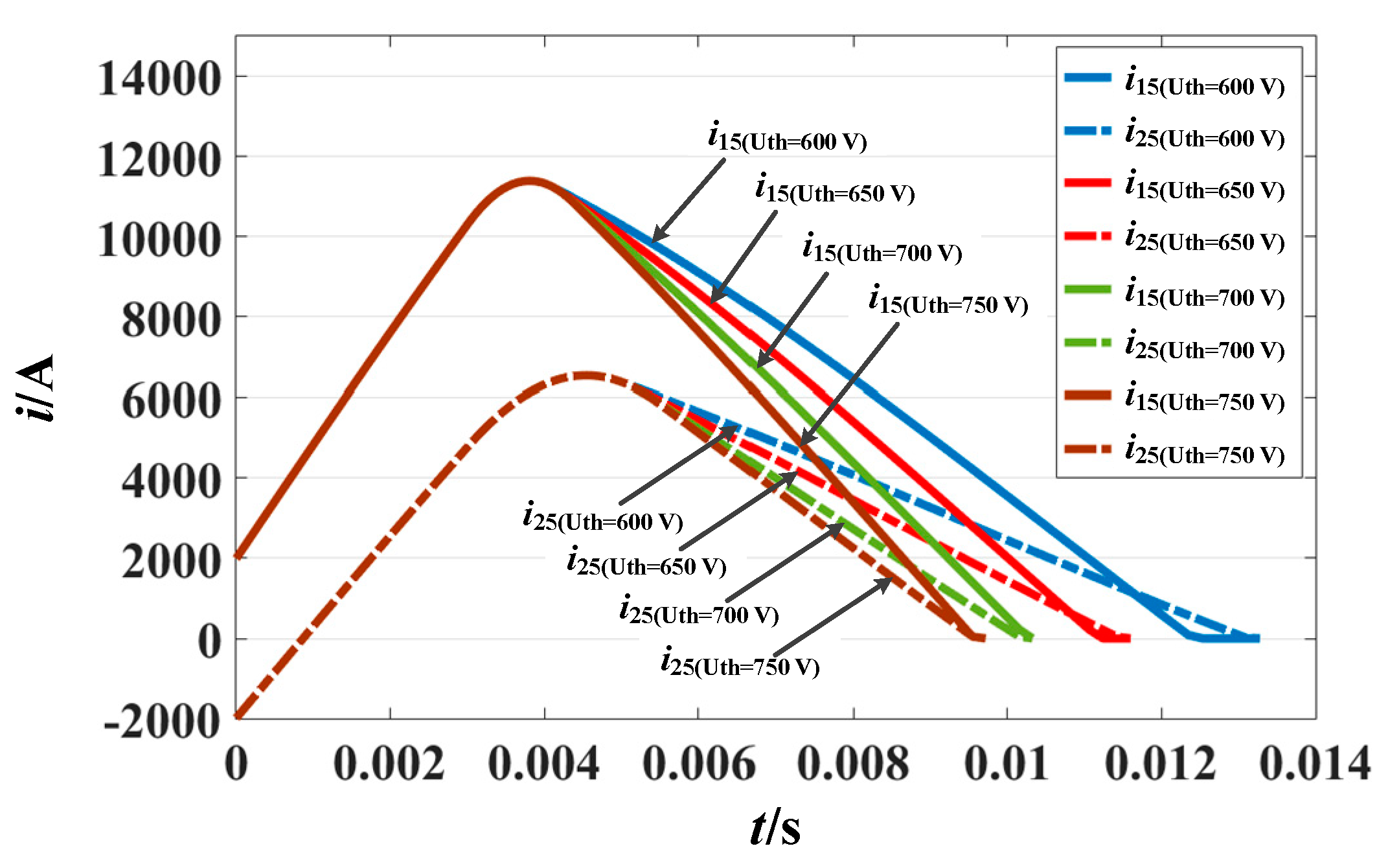
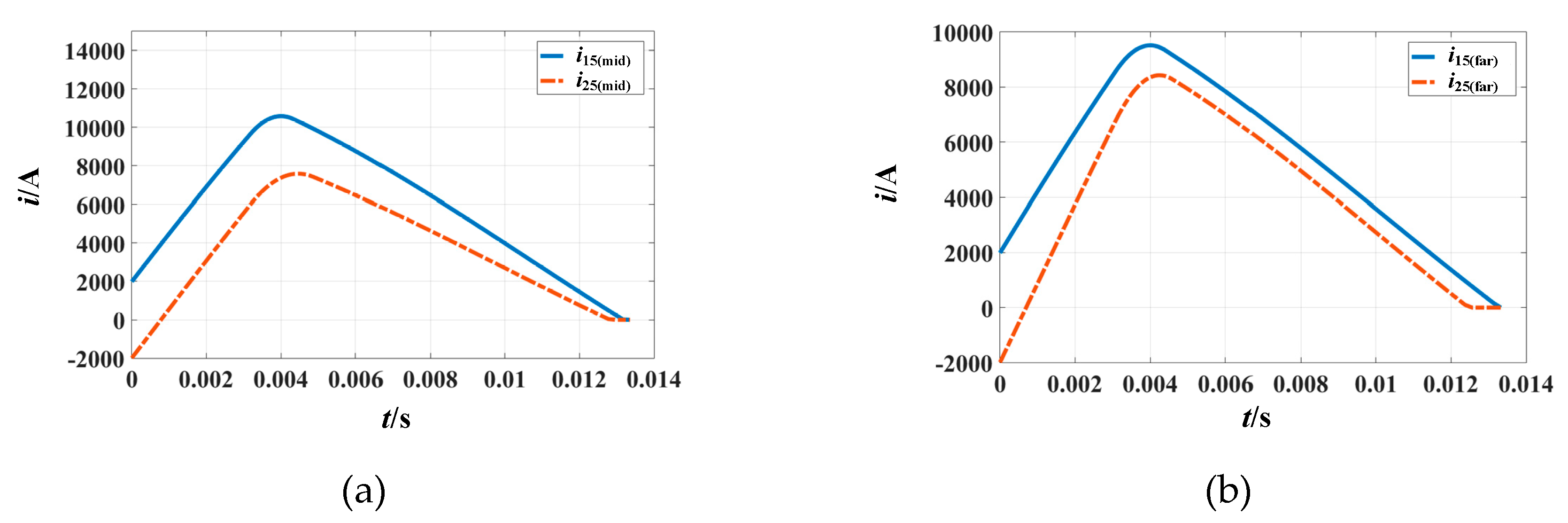
The correctness of the analytical calculation results of the short circuit current considering the DC circuit breaker was verified by system simulation. Combined with specific engineering constraints, the configuration of key parameters of DC circuit breaker was analyzed by using the analytical solution method proposed in this paper. This calculation method could accurately describe the overall trend of fault current, and provided the basis for the selection of DC line protection settings and DC circuit breaker related parameters.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







