Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid



Abstract
:1. Introduction
2. Induction Generator Wind Energy System
2.1. Induction Generator Model
2.2. Control Scheme
3. State Estimation
3.1. Reference Voltage Model-Based Rotor Flux Estimation
3.2. Kalman Filter Based Rotor Flux Estimation
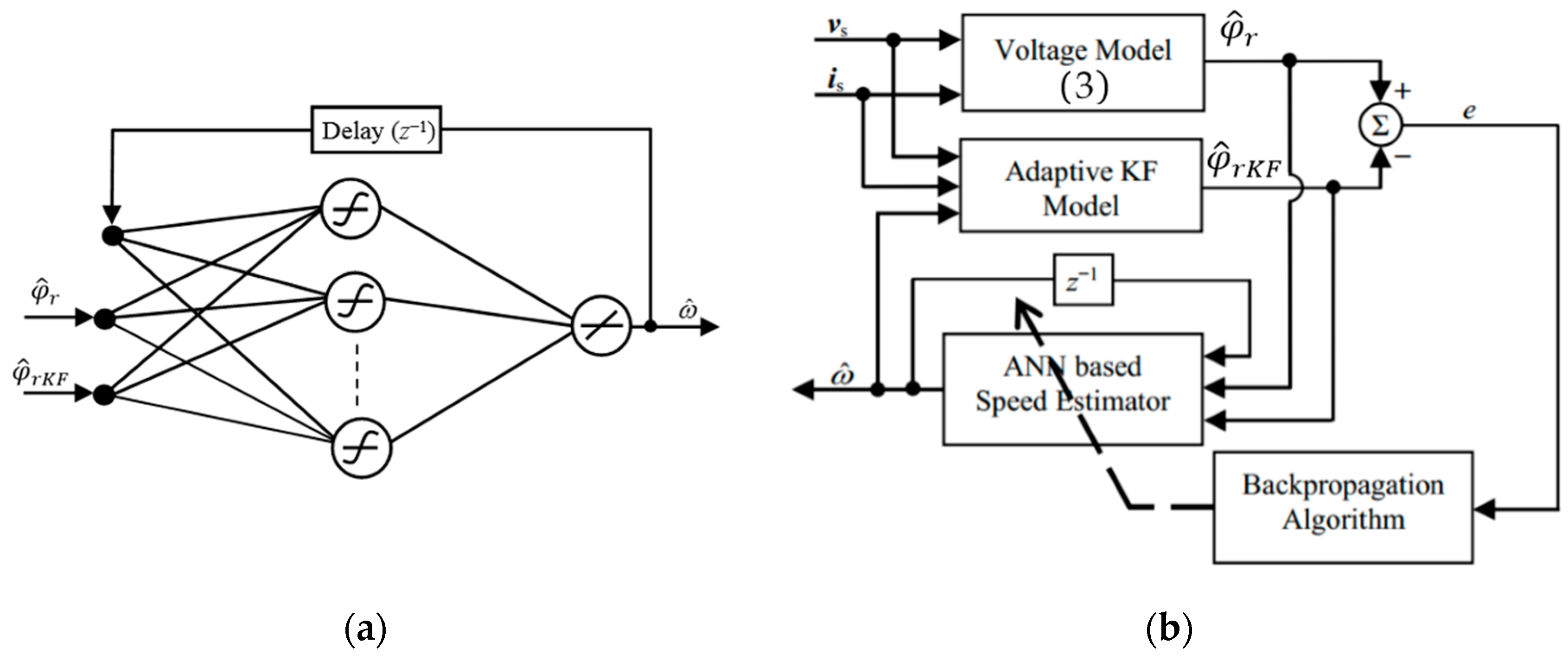
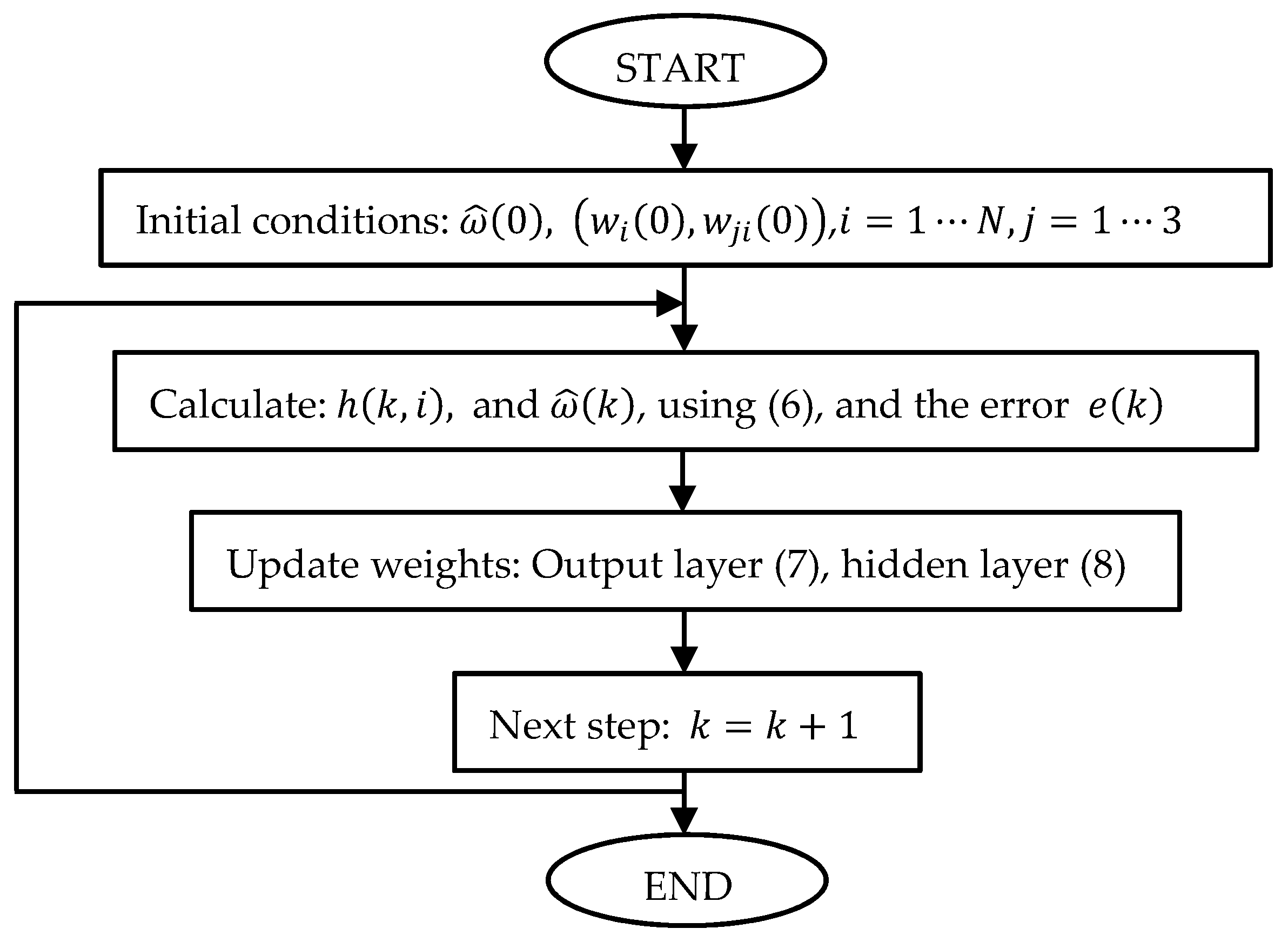
3.3. Artificial Neural Network Speed Estimation
- Two external signals (estimated rotor flux from the reference voltage Model (3) and estimated rotor flux from the KF (5)).
- A feedback from the ANN output with a delay.
4. Load Side Control
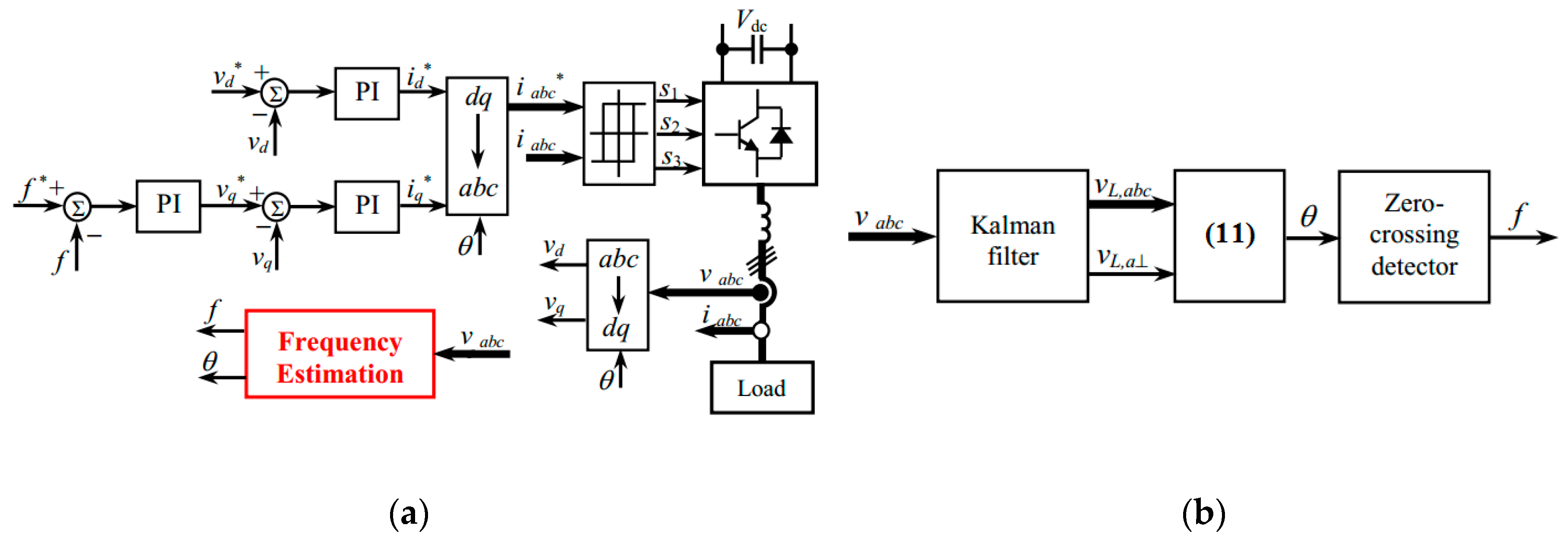
4.1. Control Design
4.2. Frequency Estimation
5. Battery Storage System and Power Management
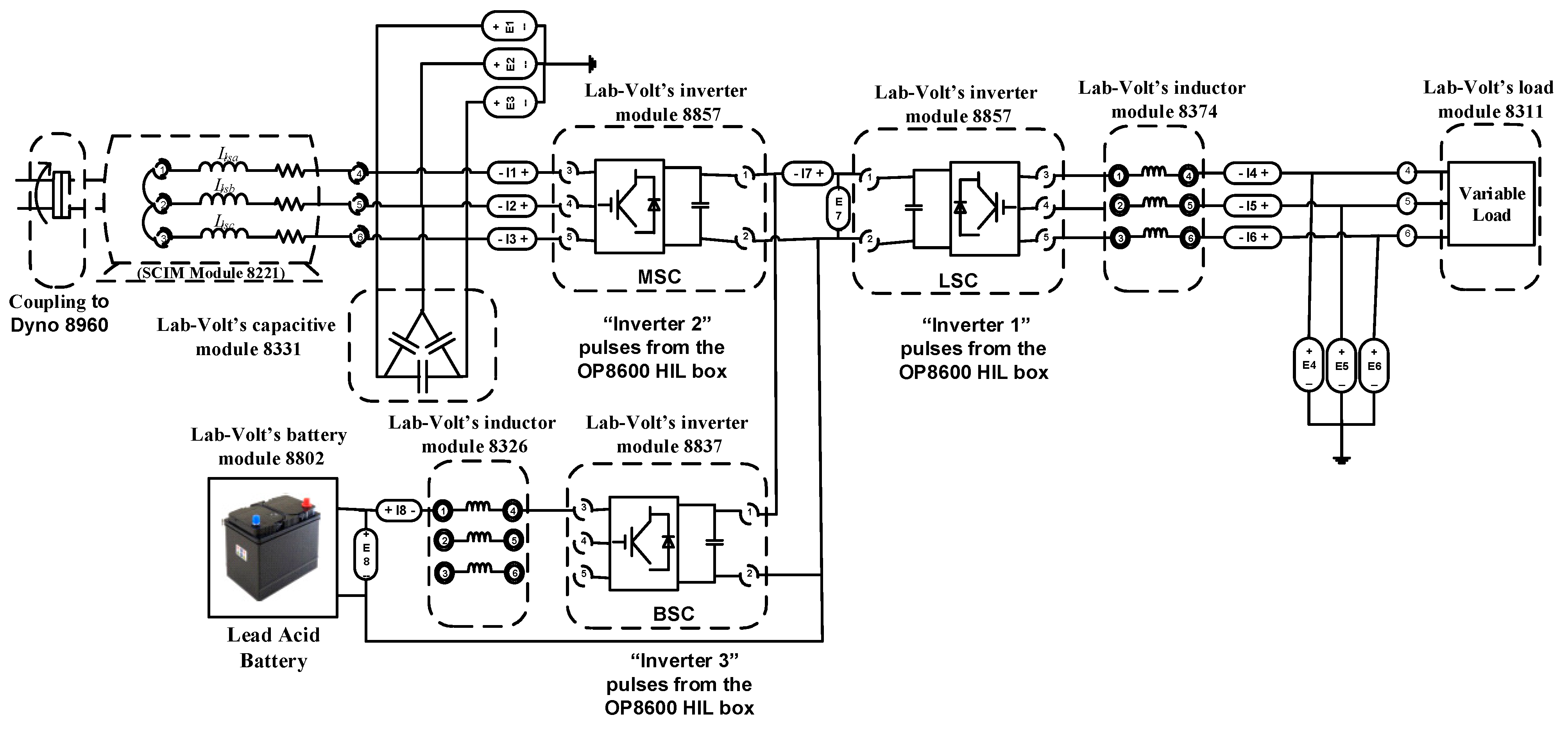
6. Experimental Results
- Three-phase squirrel-cage induction generator.
- Capacitor bank connected to the generator stator terminal for running as a self-started generator.
- Four-quadrant dynamometer, coupled with the induction generator, for wind turbine emulation.
- Back-to-back IGBT converters to connect the generator to the load.
- Bidirectional IGBT DC-DC converter and line inductor to connect the BSS to the DC-link.
- Battery bank based on lead acid batteries.
- Three-phase inductor as the filter to connect the DC-AC converter to the load.
- Variable switching resistor to vary the three-phase AC load.
- Data acquisition interface (OPAL-RT OP8660) for voltage-current measurements.
- Real-time digital simulator (OPAL-RT OP5600) for rapid control prototyping and Hardware-in-the-loop (HIL).
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
- State prediction:
- 2.
- Estimated error covariance:
- 3.
- Kalman filter gain calculation:
- 4.
- State correction:
- 5.
- Error covariance update:
References
- Bansal, R.C. Three-phase self-excited induction generators: An overview. IEEE Trans. Energy Convers. 2005, 20, 292–299. [Google Scholar] [CrossRef]
- Chilipi, R.R.; Singh, B.; Murthy, S.S. Performance of a self-excited induction generator with DSTATCOM-DTC drive-based voltage and frequency controller. IEEE Trans. Energy Convers. 2014, 29, 545–557. [Google Scholar] [CrossRef]
- Senthil Kumar, S.; Kumaresan, N.; Subbiah, M. Analysis and control of capacitor-excited induction generators connected to a micro-grid through power electronic converters. IET Gener. Transm. Dis. 2015, 9, 911–920. [Google Scholar] [CrossRef]
- Gao, S.; Bhuvaneswari, G.; Murthy, S.S.; Kalla, U. Efficient voltage regulation scheme for three-phase self-excited induction generator feeding single-phase load in remote locations. IET Renew. Power Gen. 2014, 8, 100–108. [Google Scholar] [CrossRef]
- Singh, B.; Murthy, S.S.; Reddy, R.S.; Arora, P. Implementation of modified current synchronous detection method for voltage control of self-excited induction generator. IET Power Electron. 2015, 8, 1146–1155. [Google Scholar] [CrossRef]
- Scherer, L.G.; Tambara, R.V.; De Camargo, R.F. Voltage and frequency regulation of standalone self-excited induction generator for micro-hydro power generation using discrete-time adaptive control. IET Renew. Power Gen. 2016, 10, 531–540. [Google Scholar] [CrossRef]
- Urtasun, A.; Barrios, E.L.; Sanchis, P.; Marroyo Palomo, L. Frequency-based energy-management strategy for stand-alone systems with distributed battery storage. IEEE Trans. Power Electron. 2015, 30, 4794–4808. [Google Scholar] [CrossRef]
- Korlinchak, C.; Comanescu, M. Sensorless field orientation of an induction motor drive using a time-varying observer. IET Electr. Power Appl. 2012, 6, 353–361. [Google Scholar] [CrossRef]
- Merabet, A.; Rajasekaran, V.; McMullin, A.; Ibrahim, H.; Beguenane, R.; Thongam, J.S. Nonlinear model predictive controller with state observer for speed sensorless induction generator–wind turbine systems. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2013, 227, 198–213. [Google Scholar] [CrossRef]
- Zhao, K.; You, X. Speed estimation of induction motor using modified voltage model flux estimation. In Proceedings of the IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009; pp. 1979–1982. [Google Scholar]
- Bensiali, N.; Etien, E.; Benalia, N. Convergence analysis of back-EMF MRAS observers used in sensorless control of induction motor drives. Math. Comput. Simul. 2015, 115, 12–23. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Dybkowski, M. Stator-current-based MRAS estimator for a wide range speed-sensorless induction-motor drive. IEEE Trans. Ind. Electron. 2010, 57, 1296–1308. [Google Scholar] [CrossRef]
- Gadoue, S.M.; Giaouris, D.; Finch, J.W. Stator current model reference adaptive systems speed estimator for regenerating-mode low-speed operation of sensorless induction motor drives. IET Electr. Power Appl. 2013, 7, 597–606. [Google Scholar] [CrossRef] [Green Version]
- Marcetic, D.P.; Krcmar, I.R.; Gecic, M.A.; Matić, P.R. Discrete rotor flux and speed estimators for high-speed shaft-sensorless IM drives. IEEE Trans. Ind. Electron. 2014, 61, 3099–3108. [Google Scholar] [CrossRef]
- Merabet, A.; Tanvir, A.A.; Beddek, K. Torque and state estimation for real-time implementation of multivariable control in sensorless induction motor drives. IET Electr. Power Appl. 2017, 11, 653–663. [Google Scholar] [CrossRef]
- Barut, M. Bi Input-extended Kalman filter based estimation technique for speed-sensorless control of induction motors. Energy Convers. Manag. 2010, 51, 2032–2040. [Google Scholar] [CrossRef]
- Mazaheri, A.; Radan, A. Performance evaluation of nonlinear Kalman filtering techniques in low speed brushless DC motors driven sensor-less positioning systems. Control Eng. Pract. 2017, 60, 148–156. [Google Scholar] [CrossRef]
- Alonge, F.; D’Ippolito, F.; Sferlazza, A. Sensorless control of induction-motor drive based on robust Kalman filter and adaptive speed estimation. IEEE Trans. Ind. Electron. 2014, 61, 1444–1453. [Google Scholar] [CrossRef]
- Habibullah, M.; Lu, D.D.-C. A speed-sensorless FS-PTC of induction motors using extended Kalman filters. IEEE Trans. Ind. Electron. 2015, 62, 6765–6778. [Google Scholar] [CrossRef]
- Farasat, M.; Trzynadlowski, A.M.; Fadali, M.S. Efficiency improved sensorless control scheme for electric vehicle induction motors. IET Electr. Syst. Transp. 2014, 4, 122–131. [Google Scholar] [CrossRef]
- Zerdali, E.; Barut, M. The comparisons of optimized extended Kalman filters for speed-sensorless control of induction motors. IEEE Trans. Ind. Electron. 2017, 64, 4340–4351. [Google Scholar] [CrossRef]
- Cirrincione, M.; Accetta, A.; Pucci, M.; Vitale, G. MRAS speed observer for high-performance linear induction motor drives based on linear neural networks. IEEE Trans. Power Electron. 2013, 28, 123–134. [Google Scholar] [CrossRef]
- Al-Ghossini, H.; Locment, F.; Sechilariu, M.; Gagneur, L.; Forgez, C. Adaptive-tuning of extended Kalman filter used for small scale wind generator control. Renew. Energy 2016, 85, 1237–1245. [Google Scholar] [CrossRef]
- Ammar, A.; Kheldoun, A.; Metidji, B.; Ameid, T.; Azzoug, Y. Feedback linearization based sensorless direct torque control using stator flux MRAS-sliding mode observer for induction motor drive. ISA Trans. 2020, 98, 382–392. [Google Scholar] [CrossRef] [PubMed]
- Korzonek, M.; Tarchala, G.; Orlowska-Kowalska, T. A review on MRAS-type speed estimators for reliable and efficient induction motor drives. ISA Trans. 2019, 93, 1–13. [Google Scholar] [CrossRef]
- Pal, A.; Das, S.; Chattopadhyay, A.K. An improved rotor flux space vector based MRAS for field oriented control of induction motor drives. IEEE Trans. Power Electron. 2018, 33, 5131–5141. [Google Scholar] [CrossRef]
- Zerdali, E.; Mengüç, E.C. Novel complex-valued stator current-based MRAS estimators with different adaptation mechanisms. IEEE Trans. Instrum. Meas. 2019, 68, 3793–3795. [Google Scholar] [CrossRef]
- Velo, R.; López, P.; Maseda, F. Wind speed estimation using multilayer perceptron. Energy Convers. Manag. 2014, 81, 1–9. [Google Scholar] [CrossRef]
- Jaramillo-Lopeza, F.; Kenne, G.; Lamnabhi-Lagarrigue, F. A novel online training neural network-based algorithm for wind speed estimation and adaptive control of PMSG wind turbine system for maximum power extraction. Renew. Energy 2016, 86, 38–48. [Google Scholar] [CrossRef]
- Merabet, A.; Tanvir, A.A.; Beddek, K. Speed control of sensorless induction generator by artificial neural network in wind energy conversion system. IET Renew. Power Gen. 2016, 10, 1597–1606. [Google Scholar] [CrossRef]
- Gadoue, S.M.; Giaouris, D.; Finch, J.W. Sensorless control of induction motor drives at very low and zero speeds using neural network flux observers. IEEE Trans. Ind. Electron. 2009, 56, 3029–3039. [Google Scholar] [CrossRef]
- Maiti, S.; Verma, V.; Chakraborty, C.; Hori, Y. An adaptive speed sensorless induction motor drive with artificial neural network for stability enhancement. IEEE Trans. Ind. Inform. 2012, 8, 757–766. [Google Scholar] [CrossRef]
- Ciobotaru, M.; Teodorescu, R.; Blaabjerg, F. A new single-phase PLL structure based on second order generalized integrator. In Proceedings of the 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–6. [Google Scholar]
- Merabet, A.; Ahmed, K.T.; Ibrahim, H.; Beguenane, R.; Ghias, A.M. Energy management and control system for laboratory scale microgrid based wind-PV-battery. IEEE Trans. Sustain. Energy 2017, 8, 145–154. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, D.; Zheng, H. Signal frequency estimation based on Kalman filtering method. In Proceedings of the 8th International Conference on Computer and Automation Engineering, Melbourne, Australia, 3–4 March 2016; pp. 1–6. [Google Scholar]
- Cardoso, R.; Camargo, R.F.D.; Pinheiro, H.; Gründling, H. Kalman filter based synchronisation methods. IET Gener. Transm. Dis. 2008, 2, 542–555. [Google Scholar] [CrossRef]
- Marafão, F.P.; Colón, D.; De Padua, M.S.; Deckmann, S.M. Kalman filter on power electronics and power systems applications. In Kalman Filter: Recent Advances and Applications; Moreno, V.M., Pigazo, A., Eds.; IntechOpen: London, UK, 2009; pp. 397–420. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Characteristics | |
|---|---|---|
| Dynamometer | Four-quadrant, 0−3 Nm, 0−2500 rpm, 350 W | |
| SCIG | Four-pole, 3 phases, 60 Hz, 208 V, 1670 rpm, 175 W | |
| Battery | Lead acid, 48 V, 9 Ah, max charge current 2.7 | |
| Characteristics | Values |
|---|---|
| IGBT power converters | |
| DC-link voltage | 220 V |
| IGBT peak current | 12 A |
| Switching control (voltage, frequency) | 0/5 V, 0−20 kHz |
| Excitation capacitor bank | |
| Power, voltage | 252 VAR, 120 V |
| Capacitance | 8.8 μF |
| Resistance | 300 Ω |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanvir, A.A.; Merabet, A. Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid. Energies 2020, 13, 1743. https://doi.org/10.3390/en13071743
Tanvir AA, Merabet A. Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid. Energies. 2020; 13(7):1743. https://doi.org/10.3390/en13071743
Chicago/Turabian StyleTanvir, Aman A., and Adel Merabet. 2020. "Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid" Energies 13, no. 7: 1743. https://doi.org/10.3390/en13071743
APA StyleTanvir, A. A., & Merabet, A. (2020). Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid. Energies, 13(7), 1743. https://doi.org/10.3390/en13071743