Adaptive Smoothing Power Following Control Strategy Based on an Optimal Efficiency Map for a Hybrid Electric Tracked Vehicle


Abstract
1. Introduction
2. HEB Simulation Model
2.1. HEB Architecture
2.2. A Novel Engine Model Based on BPNN
2.2.1. Transient Fuel Consumption Model
2.2.2. Output Torque Model
2.3. Driveline Components’ Models
2.3.1. Electric Machine Model
2.3.2. Supercapacitor Model
2.3.3. Hydraulic Pump Model
2.3.4. Tracked Walking Mechanism Model
2.4. Dynamic Model
3. ASPF Control Strategy
3.1. Target Problem
3.1.1. Frequent Fluctuation of Genset’s Working Points
3.1.2. Large Change Rate of Output Power
3.1.3. Hydraulic Pump’s Interference in Target Trajectory
3.2. Development of the ASPF Strategy
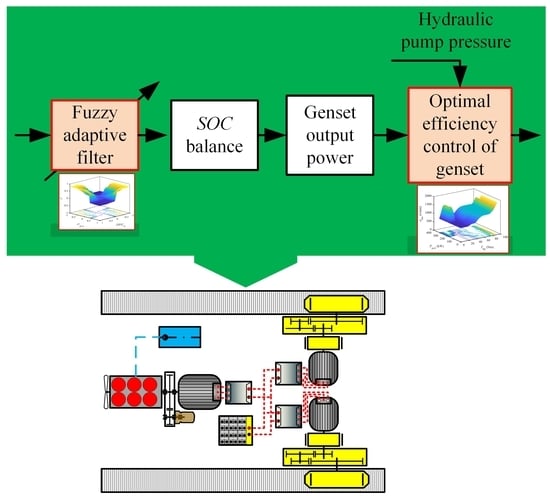
3.2.1. Structure of the ASPF Strategy
3.2.2. Fuzzy Adaptive Filter
3.2.3. Correctional Optimal Efficiency Map
4. HEB HIL Platform
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Variables | |
| α | slope angle, |
| β | filter coefficient |
| η | efficiency, % |
| μ | ground deformation resistance coefficient |
| ξ | rotary mass coefficient |
| ρ | density, g/L |
| τ | time constant |
| φ | track slip rate, % |
| ω | angular speed, rad/s |
| be | specific fuel consumption, g/(kWh) |
| B | fuel consumption rate, L/h |
| c | specific heat capacity, J/(kg·℃) |
| C | capacitor, F |
| f | function |
| F | force, N |
| g | gravitational acceleration, m/s2 |
| I | current, A |
| J | rotational inertia, kg·m2 |
| m | mass, kg |
| n | speed, r/min |
| p | pressure, Pa |
| P | power, W |
| q | displacement, ml/r |
| Q | flow, L/min |
| r | radius, m |
| R | correction factor |
| Re | resistance, Ω; |
| s | Laplace operator |
| SOC | state of charge |
| t | time, s |
| T | torque, Nm |
| Tem | temperature, ℃ |
| U | voltage, V |
| ν | velocity, m/s |
| Subscripts | |
| a | air |
| b | bulldozing |
| bp | back propagation neural network |
| cl | current limit |
| cmd | command |
| coul | coulombic |
| ds | drive system |
| e | engine |
| em | electric machine |
| est | estimated |
| fu | fuel |
| g | generator |
| h | heat |
| hi | high |
| hp | hydraulic pump |
| in | input |
| ini | initial |
| lo | low |
| m | mechanical |
| s | steady state |
| sc | supercapacitor |
| t | transient state |
| ul | voltage limit |
| veh | vehicle |
| Superscripts | |
| br | braking process |
| chg | charging process |
| dis | discharging process |
| dr | driving process |
| Abbreviations | |
| ASPF | adaptive smooth power following |
| BPNN | back propagation neural network |
| CAN | control area network |
| DOM | degree of membership |
| DP | dynamic programming |
| ECMS | equivalent consumption minimization strategy |
| EFC | equivalent fuel consumption |
| EFSR | equivalent fuel saving ratio |
| ESU | energy storage unit |
| FC | fuel consumption |
| GA | genetic algorithm |
| HEB | hybrid electric bulldozer |
| HECM | hybrid electric construction machinery |
| HEV | hybrid electric vehicle |
| HIL | hardware in loop |
| HMB | hydro-mechanical bulldozer |
| MPC | model predictive control |
| PF | power following |
| PMP | Pontryagin’s minimum principle |
| PSO | particle swarm optimization |
| SDP | stochastic dynamic programming |
| TCP/IP | transmission control protocol/ internet protocol |
| VCU | vehicle control unit |
References
- Tran, D.D.; Vafaeipour, M.; El Baghdadi, M.; Barrero, R.; Van Mierlo, J.; Hegazy, O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: Topologies and integrated energy management strategies. Renew. Syst. Energ. Rev. 2020, 119, 109596. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, C.; Li, G.; Liu, Y.; Chen, Z. Cooperative control strategy for plug-in hybrid electric vehicles based on a hierarchical framework with fast calculation. J. Clean. Prod. 2020, 251, 119627. [Google Scholar] [CrossRef]
- Zhang, B.; Yang, F.; Teng, L.; Ouyang, M.; Guo, K.; Li, W.; Du, J. Comparative analysis of technical route and market development for light-duty PHEV in China and the US. Energies 2019, 12, 3753. [Google Scholar] [CrossRef]
- Xu, B.; Rathod, D.; Zhang, D.; Yebi, A.; Zhang, X.; Li, X.; Filipi, Z. Parametric study on reinforcement learning optimized energy management strategy for a hybrid electric vehicle. Appl. Energy 2020, 259, 114200. [Google Scholar] [CrossRef]
- He, X.; Jiang, Y. Review of hybrid electric systems for construction machinery. Autom. Constr. 2018, 92, 286–296. [Google Scholar] [CrossRef]
- Wang, J.; Yang, Z.; Liu, S.; Zhang, Q.; Han, Y. A comprehensive overview of hybrid construction machinery. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, X.; Xi, L.; Sun, C. Development of a representative operation cycle characterized by dual time series for bulldozers. Proc. Inst. Mech. Eng. D J. Aut. Eng. 2017, 231, 1818–1828. [Google Scholar] [CrossRef]
- Hong, W.; FengChun, S. Dynamic modeling and simulation on a hybrid power system for dual-motor-drive electric tracked bulldozer. Appl. Mech. Mater. 2014, 494, 229–233. [Google Scholar]
- Song, Q.; Zeng, P.; He, S.; Wang, H. Power flowing control strategy of series hybrid tracked bulldozer at the typical working condition. J. Mech. Eng. 2014, 50, 136–142. [Google Scholar] [CrossRef]
- Wang, H.; Huang, Y.; Khajepour, A.; Song, Q. Model predictive control-based energy management strategy for a series hybrid electric tracked vehicle. Appl. Energy 2016, 182, 105–114. [Google Scholar] [CrossRef]
- Hong, W. Research on Dynamic Modeling and Control Strategy for Hybrid Tracked Bulldozer; Beijing Institute of Technology: Beijing, China, 2015. [Google Scholar]
- Azmat, M.; Kummer, S. Potential applications of unmanned ground and aerial vehicles to mitigate challenges of transport and logistics-related critical success factors in the humanitarian supply chain. Asian J. Sustain. Soc. Responsib. 2020, 5, 3. [Google Scholar] [CrossRef]
- Azmat, M.; Kummer, S.; Moura, L.T.; Gennaro, F.D.; Moser, R. Future outlook of highway operations with implementation of innovative technologies like AV, CV, IOT and big data. Logistics 2019, 3, 15. [Google Scholar] [CrossRef]
- Wintersberger, S.; Azmat, M.; Kummer, S. Are we ready to ride autonomous vehicles? A pilot study on austrian consumers’ perspective. Logistics 2019, 3, 20. [Google Scholar] [CrossRef]
- Shabbir, W.; Evangelou, S.A. Threshold-changing control strategy for series hybrid electric vehicles. Appl. Energy 2019, 235, 761–775. [Google Scholar] [CrossRef]
- Li, H.; Ravey, A.; N’Diaye, A.; Djerdir, A. A novel equivalent consumption minimization strategy for hybrid electric vehicle powered by fuel cell, battery and supercapacitor. J. Power Sources 2018, 395, 262–270. [Google Scholar] [CrossRef]
- Chen, S.Y.; Wu, C.H.; Hung, Y.H.; Chung, C.T. Optimal strategies of energy management integrated with transmission control for a hybrid electric vehicle using dynamic particle swarm optimization. Energy 2018, 160, 154–170. [Google Scholar] [CrossRef]
- Du, G.; Zou, Y.; Zhang, X.; Kong, Z.; Wu, J.; He, D. Intelligent energy management for hybrid electric tracked vehicles using online reinforcement learning. Appl. Energy 2019, 251, 113388. [Google Scholar] [CrossRef]
- Guo, Q.; Zhao, Z.; Shen, P.; Zhan, X.; Li, J. Adaptive optimal control based on driving style recognition for plug-in hybrid electric vehicle. Energy 2019, 186, 115824. [Google Scholar] [CrossRef]
- Enang, W.; Bannister, C. Modelling and control of hybrid electric vehicles (a comprehensive review). Renew. Sustain. Energ. Rev. 2017, 74, 1210–1239. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Sun, Y.; You, S. Model predictive control strategy for energy optimization of series-parallel hybrid electric vehicle. J. Clean. Prod. 2018, 199, 348–358. [Google Scholar] [CrossRef]
- Lu, X.; Wu, Y.; Lian, J.; Zhang, Y.; Chen, C.; Wang, P.; Meng, L. Energy management of hybrid electric vehicles: A review of energy optimization of fuel cell hybrid power system based on genetic algorithm. Energy Convers. Manag. 2020, 205, 112474. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Khajepour, A.; Li, B.; Ji, J.; Zhao, K.; Hu, C. A review of power management strategies and component sizing methods for hybrid vehicles. Renew. Sustain. Energ. Rev. 2018, 96, 132–144. [Google Scholar] [CrossRef]
- Wu, Y.; Tan, H.; Peng, J.; Zhang, H.; He, H. Deep reinforcement learning of energy management with continuous control strategy and traffic information for a series-parallel plug-in hybrid electric bus. Appl. Energy 2019, 247, 454–466. [Google Scholar] [CrossRef]
- Wu, J.; Wang, X.; Li, L.; Qin, C.; Du, Y. Hierarchical control strategy with battery aging consideration for hybrid electric vehicle regenerative braking control. Energy 2018, 145, 301–312. [Google Scholar] [CrossRef]
- Li, H.; Ravey, A.; N’Diaye, A.; Djerdir, A. Online adaptive equivalent consumption minimization strategy for fuel cell hybrid electric vehicle considering power sources degradation. Energy Convers. Manag. 2019, 192, 133–149. [Google Scholar] [CrossRef]
- Gong, J.; Zhang, D.; Guo, Y.; Liu, C.; Zhao, Y.; Hu, P.; Quan, W. Power control strategy and performance evaluation of a novel electro-hydraulic energy-saving system. Appl. Energy 2019, 233, 724–734. [Google Scholar] [CrossRef]
- Shi, Y.; Xia, Y.; Zhang, Y.; Yao, Z. Intelligent identification for working-cycle stages of excavator based on main pump pressure. Autom. Constr. 2020, 109, 102991. [Google Scholar] [CrossRef]
- Yu, Y.X.; Ahn, K.K. Optimization of energy regeneration of hybrid hydraulic excavator boom system. Energy Convers. Manag. 2019, 183, 26–34. [Google Scholar] [CrossRef]
- Larsson, L.V.; Ericson, L.; Uebel, K.; Krus, P. Low-level control of hybrid hydromechanical transmissions for heavy mobile working machines. Energies 2019, 12, 1683. [Google Scholar] [CrossRef]
- Li, T.; Liu, H.; Ding, D. Predictive energy management of fuel cell supercapacitor hybrid construction equipment. Energy 2018, 149, 718–729. [Google Scholar] [CrossRef]
- Hippalgaonkar, R.; Ivantysynova, M. Optimal power management of hydraulic hybrid mobile machines-part I: Theoretical studies, modeling and simulation. J. Dyn. Syst. T Asme 2016, 138. [Google Scholar] [CrossRef]
- Nilsson, T.; Froberg, A.; Aslund, J. Predictive control of a diesel electric wheel loader powertrain. Control. Eng. Pract. 2015, 41, 47–56. [Google Scholar] [CrossRef]
- Zhou, H.; Zhao, P.Y.; Chen, Y.L.; Yang, H.Y. Prediction-based stochastic dynamic programming control for excavator. Autom. Constr. 2017, 83, 68–77. [Google Scholar] [CrossRef]
- Kim, H.; Yoo, S.; Cho, S.; Yi, K. Hybrid control algorithm for fuel consumption of a compound hybrid excavator. Autom. Constr. 2016, 68, 1–10. [Google Scholar] [CrossRef]
- Chen, Q.; Lin, T.; Ren, H. Parameters optimization and control strategy of power train systems in hybrid hydraulic excavators. Mechatronics 2018, 56, 16–25. [Google Scholar] [CrossRef]
- Li, T.; Huang, L.; Liu, H. Energy management and economic analysis for a fuel cell supercapacitor excavator. Energy 2019, 172, 840–851. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, Q.F. Real-time energy management controller design for a hybrid excavator using reinforcement learning. J. Zhejiang Univ. Sci. A 2017, 18, 855–870. [Google Scholar] [CrossRef]
- Zhou, C.; Xu, H.C.; Ding, L.Y.; Wei, L.C.; Zhou, Y. Dynamic prediction for attitude and position in shield tunneling: A deep learning method. Autom. Constr. 2019, 105, 16. [Google Scholar] [CrossRef]
- Zhou, H.; Zhao, P.Y.; Chen, Y.L. Fuzzy logic control for a hydraulic hybrid excavator based on torque prediction and genetic algorithm optimization. Proc. Inst. Mech. Eng. D J. Aut. Eng. 2018, 232, 983–994. [Google Scholar] [CrossRef]
- Liang, X.J.; Wu, W.R. Control strategy of energy saving for power system in hydraulic surface drilling rig. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 8. [Google Scholar]
- Ye, Y.; Yin, C.B.; Gong, Y.; Zhou, J.J. Position control of nonlinear hydraulic system using an improved PSO based PID controller. Mech. Syst. Sig. Process. 2017, 83, 241–259. [Google Scholar] [CrossRef]
- Truong, D.Q.; Marco, J.; Greenwood, D.; Harper, L.; Corrochano, D.G.; Yoon, J.I. Challenges of micro/mild hybridisation for construction machinery and applicability in UK. Renew. Sustain. Energ. Rev. 2018, 91, 301–320. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, X.; Zhang, X.; Xi, L. Development of simulation model for series hybrid electric crawler bulldozer (SHECB) based on ADVISOR. Adv. Mater. Res. 2013, 732, 337–343. [Google Scholar] [CrossRef]
- Betz, M.D.; Casey, K.A.; Garnett, S.C.; Liang, C.C.; Tonsor, A.J.; Vanderham, M.E. Electric Powertrain for Machine. U.S. Patent No. 7,950,481, 31 May 2011. [Google Scholar]
- Cao, T. Evaluation of Greenhouse Gas and Criteria Emissions from Conventional and Hybrid Off-Road Equipment; University of California, Riverside: Riverside, CA, USA, 2014. [Google Scholar]
- Hong, W.; Yanjun, H.; Amir, K.; Chuan, H.; Amir, K. Electrification of Heavy-Duty Construction Vehicles; Morgan & Claypool: Williston, VT, USA, 2017; p. 1. [Google Scholar]
- Wang, H.; Huang, Y.; Khajepour, A.; He, H.; Lv, C. Mpc-Based Power Management Strategy for a Series Hybrid Electric Tracked Bulldozer. In Proceedings of the 2017 IEEE International Conference on Industrial Technology (ICIT), Toronto, ON, Canada, 22–25 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1403–1408. [Google Scholar]
- Wang, H.; Huang, Y.; He, H.; Lv, C.; Liu, W.; Khajepour, A. Chapter 5—Energy Management of Hybrid Electric Vehicles. In Modeling, Dynamics and Control of Electrified Vehicles; Zhang, H., Cao, D., Du, H., Eds.; Woodhead Publishing: Sawston, UK, 2018; pp. 159–206. [Google Scholar]
- Wang, H.; Huang, Y.; Khajepour, A.; He, H.; Cao, D. A novel energy management for hybrid off-road vehicles without future driving cycles as a priori. Energy 2017, 133, 929–940. [Google Scholar] [CrossRef]
- Wang, H.; Huang, Y.; Khajepour, A. Cyber-physical control for energy management of off-road vehicles with hybrid energy storage systems. IEEE/ASME Trans. Mechatron. 2018, 23, 2609–2618. [Google Scholar] [CrossRef]
- Han, X.; He, H.; Wu, J.; Peng, J.; Li, Y. Energy management based on reinforcement learning with double deep Q-learning for a hybrid electric tracked vehicle. Appl. Energy 2019, 254, 113708. [Google Scholar] [CrossRef]
- Wei, S.; Zou, Y.; Sun, F.; Christopher, O. A pseudospectral method for solving optimal control problem of a hybrid tracked vehicle. Appl. Energy 2017, 194, 588–595. [Google Scholar] [CrossRef]
- Zhang, B. Study on Energy Saving Mechanism and Control Strategy of Hybrid Electric Bulldozer; Beijing Jiaotong University: Beijing, China, 2017. [Google Scholar]
- Markel, T.; Brooker, A.; Hendricks, T.; Johnson, V.; Kelly, K.; Kramer, B.; O’Keefe, M.; Sprik, S.; Wipke, K. ADVISOR: A systems analysis tool for advanced vehicle modeling. J. Power Sources 2002, 110, 255–266. [Google Scholar] [CrossRef]
- Zhou, M.; Jin, H. Development of a transient fuel consumption model. Transp. Res. Part D Transp. Environ. 2017, 51, 82–93. [Google Scholar] [CrossRef]
- Zhang, Y.T.; Claudel, C.G.; Hu, M.B.; Yu, Y.H.; Shi, C.L. Develop of a fuel consumption model for hybrid vehicles. Energy Convers. Manag. 2020, 207, 112546. [Google Scholar] [CrossRef]
- Guang, H.; Jin, H. Fuel consumption model optimization based on transient correction. Energy 2019, 169, 508–514. [Google Scholar] [CrossRef]
- Lindgren, M. A transient fuel consumption model for non-road mobile machinery. Biosyst. Eng. 2005, 91, 139–147. [Google Scholar] [CrossRef]
- Zhang, L. Investigation of Performance Deterioration and Control Strategy of Automotive Diesel Engine Under Transient Operation Conditions; Jilin University: Changchun, China, 2015. [Google Scholar]
- Zhang, B.D.; Zhang, X.; Zhang, L.; Xi, L.H. Development and validation of a series hybrid electric bulldozer model on whole working condition. Key Eng. Mater. 2016, 693, 1811–1817. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Subcategory | Advantages | Challenges |
|---|---|---|---|
| Rule-Based Control | On-off | Simple and reliable, high real-time, widely used in engineering | Poor portability, poor adaptability, low energy optimal efficiency |
| Power following | |||
| Optimization-Based Control | Instantaneous optimization | Accurate optimization objectives and solutions, instantaneous or global optimal energy distribution, good fuel economy | Large computation and high requirement on processor, poor realizability of global optimization |
| Global optimization | |||
| Intelligent Control | Fuzzy logic | Unnecessary accurate mathematical model, robust and adaptive, suitable for real-time control | Depend on the engineering experience or database, knowledge base highly required |
| Neural network | |||
| Expert system | |||
| Machine learning |
| Component | Parameters | Quantity |
|---|---|---|
| Vehicle | Curb weight | 27,500 kg |
| Dynamic radius | 0.468 m | |
| Track center distance | 2.000 m | |
| Track length | 2.730 m | |
| Engine | Rated power | 154 kW |
| Rated speed | 1950 rpm | |
| Maximum torque | 927 Nm | |
| Generator | Maximum power | 200 kW |
| Rated power | 175 kW | |
| Maximum torque | 1123 Nm | |
| Maximum speed | 2200 rpm | |
| Motor | Maximum power | 75 kW |
| Rated power | 105 kW | |
| Maximum torque | 800 Nm | |
| Maximum speed | 6000 rpm | |
| Supercapacitor | Static capacity | 5 F |
| Energy capacity | 0.34 kWh | |
| Hydraulic Pump | Maximum pressure | 21 MPa |
| Rated flow | 200 L/min | |
| Reducer | Speed ratio | 93.120 |
| NB | NM | NS | Z | PS | PM | PB | ||
|---|---|---|---|---|---|---|---|---|
| NB | NB | NB | NM | PB | PB | PB | PB | |
| NS | NB | NM | NM | Z | PS | PM | PB | |
| Z | NS | NM | NM | NB | NM | NM | NS | |
| PS | PB | PM | PS | Z | NM | NM | NB | |
| PB | PB | PB | PB | PB | NM | NB | NB | |
| Control | Description |
|---|---|
| PF1 | A power following control strategy used in our previous real HEB experiment, where the genset follows the demand power, and the engine speed follows the accelerator and remains within 1300 to 1800 r/min. |
| PF2 | A typical power following control strategy based on the engine minimum fuel consumption curve in the series powertrain. |
| ASPF | Proposed adaptive smoothing power following control strategy based on the optimal efficiency map. |
| Vehicle | Control | FC (L) | EFC (L) | EFSR (%) |
|---|---|---|---|---|
| HMB | - | 0.671 | 0.671 | - |
| HEB | PF1 | 0.569 | 0.568 | 15.4 |
| PF2 | 0.537 | 0.538 | 19.8 | |
| ASPF | 0.517 | 0.515 | 23.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Guo, S.; Zhang, X.; Xue, Q.; Teng, L. Adaptive Smoothing Power Following Control Strategy Based on an Optimal Efficiency Map for a Hybrid Electric Tracked Vehicle. Energies 2020, 13, 1893. https://doi.org/10.3390/en13081893
Zhang B, Guo S, Zhang X, Xue Q, Teng L. Adaptive Smoothing Power Following Control Strategy Based on an Optimal Efficiency Map for a Hybrid Electric Tracked Vehicle. Energies. 2020; 13(8):1893. https://doi.org/10.3390/en13081893
Chicago/Turabian StyleZhang, Baodi, Sheng Guo, Xin Zhang, Qicheng Xue, and Lan Teng. 2020. "Adaptive Smoothing Power Following Control Strategy Based on an Optimal Efficiency Map for a Hybrid Electric Tracked Vehicle" Energies 13, no. 8: 1893. https://doi.org/10.3390/en13081893
APA StyleZhang, B., Guo, S., Zhang, X., Xue, Q., & Teng, L. (2020). Adaptive Smoothing Power Following Control Strategy Based on an Optimal Efficiency Map for a Hybrid Electric Tracked Vehicle. Energies, 13(8), 1893. https://doi.org/10.3390/en13081893