Dual-Inverter-Controlled Brushless Operation of Wound Rotor Synchronous Machines Based on an Open-Winding Pattern

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
- Modified inverter topology to inject fundamental and third-harmonic current components [15]. This requires sophisticated inverter design and a complicated control strategy.
- Additional thyristor switches connected in parallel to the three-phase armature winding to generate zero-crossing harmonic currents [20]. This requires additional thyristors, a bulky drive system, and modifications in the machine structure.
- Alternative operation of two inverters after the completion of each cycle and at a phase shift of −180° by means of thyristor banks installed between the inverters and the armature winding [21]. This increases the volume, cost, and weight of the machine system.
- Open-winding pattern that involves two inverters operating simultaneously at two different frequencies [22], adversely affecting the performance of the machine.
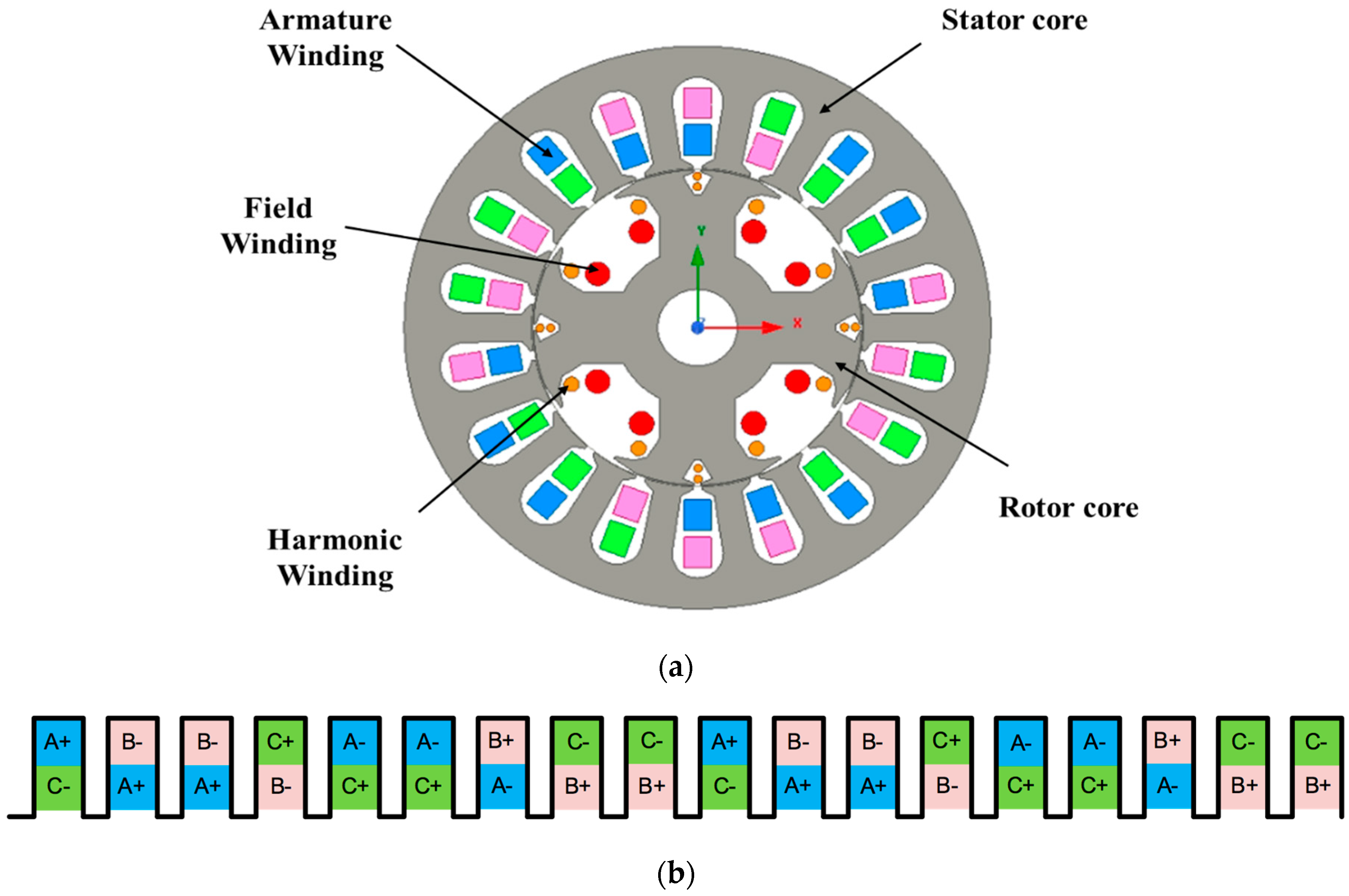
2. Proposed Topology and Working Principle
2.1. Proposed Topology
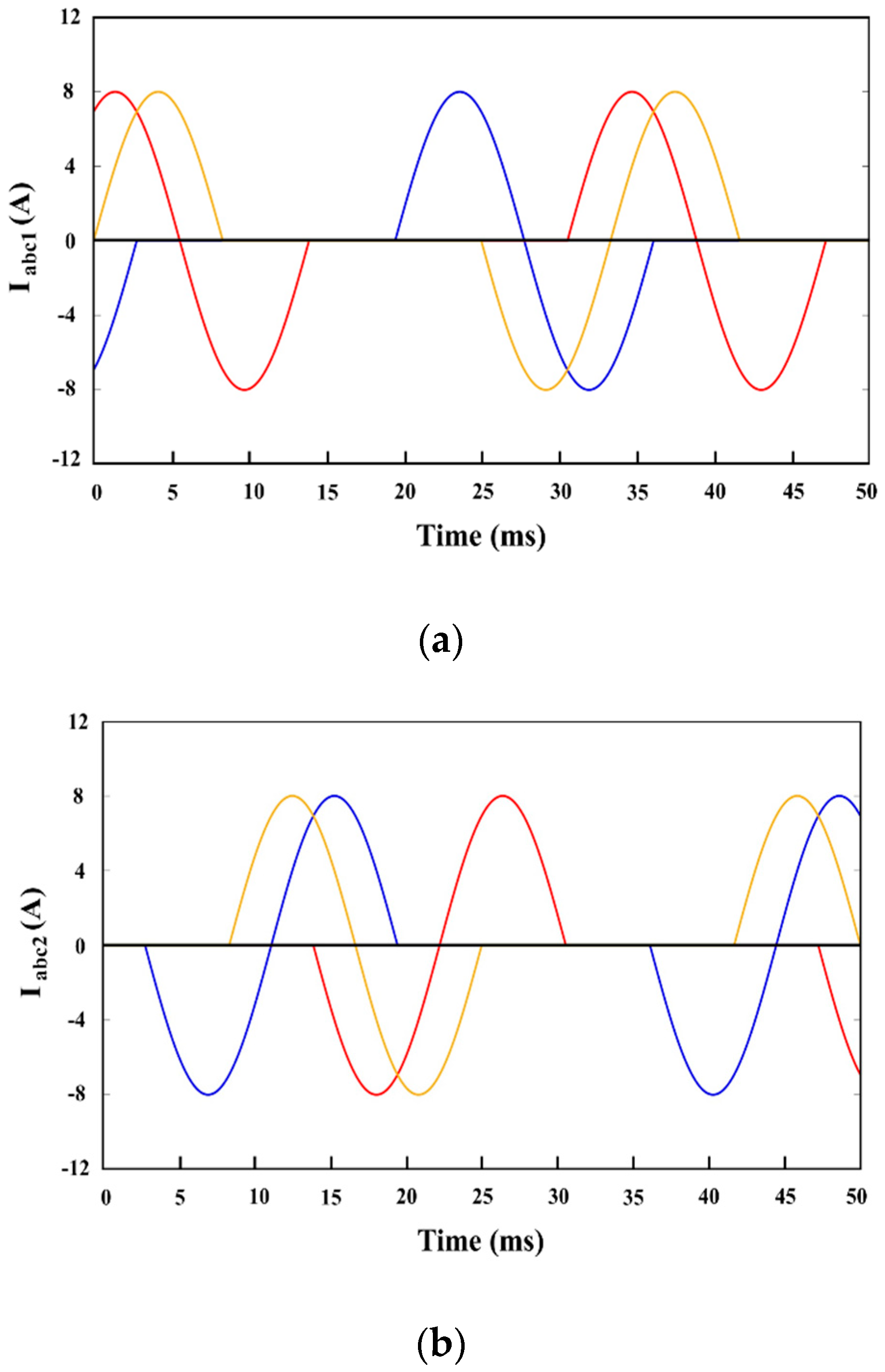
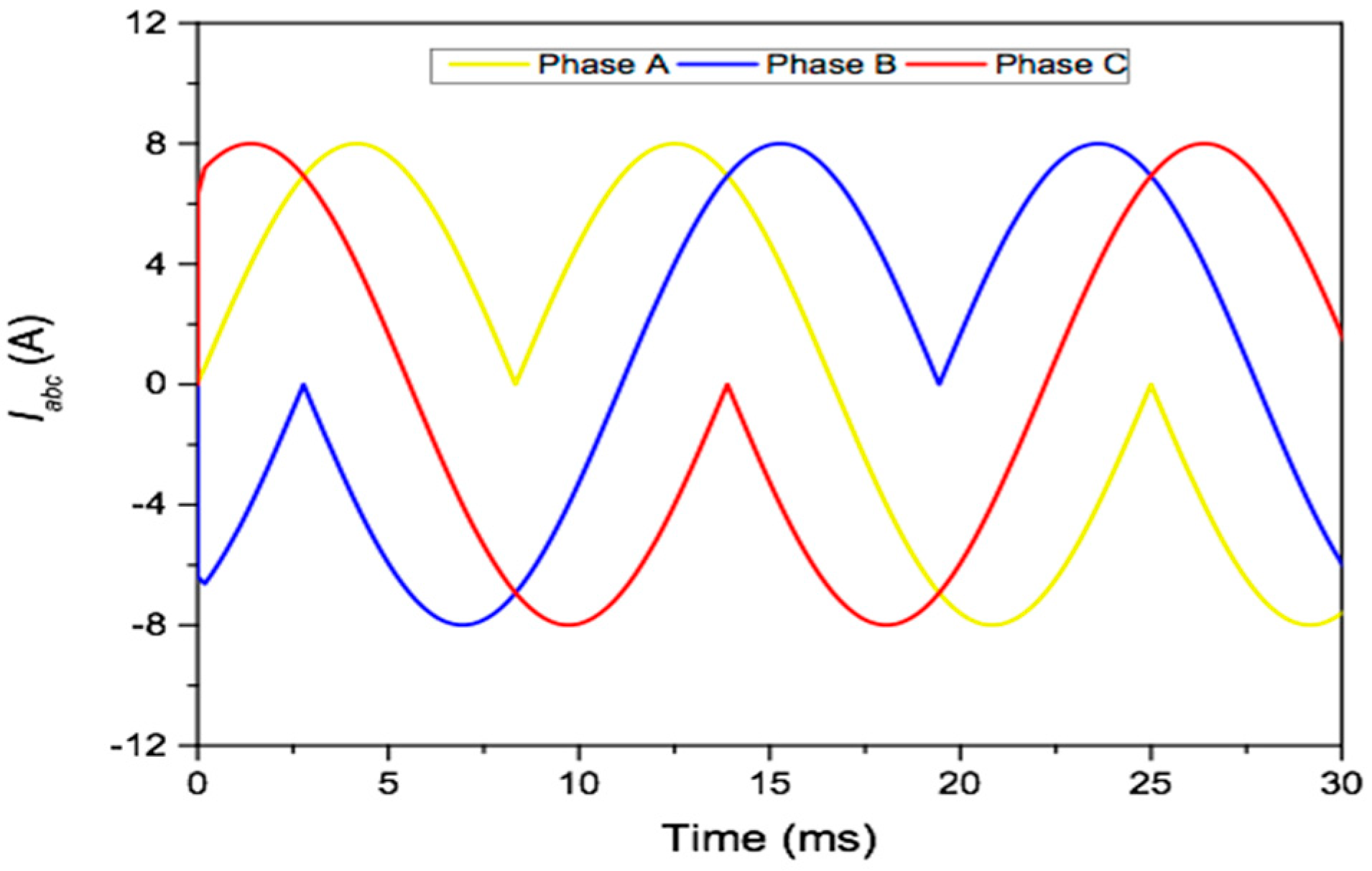
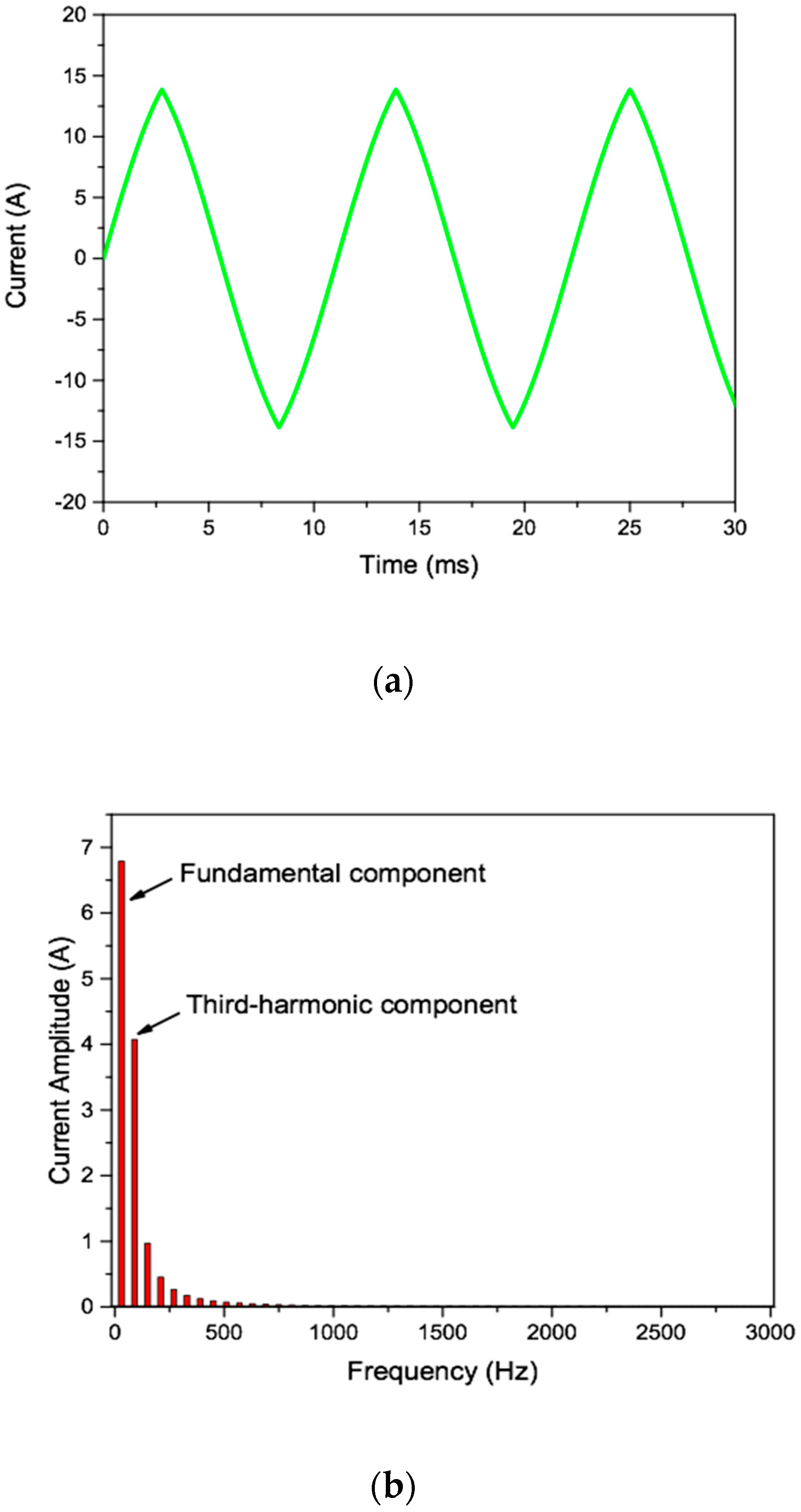
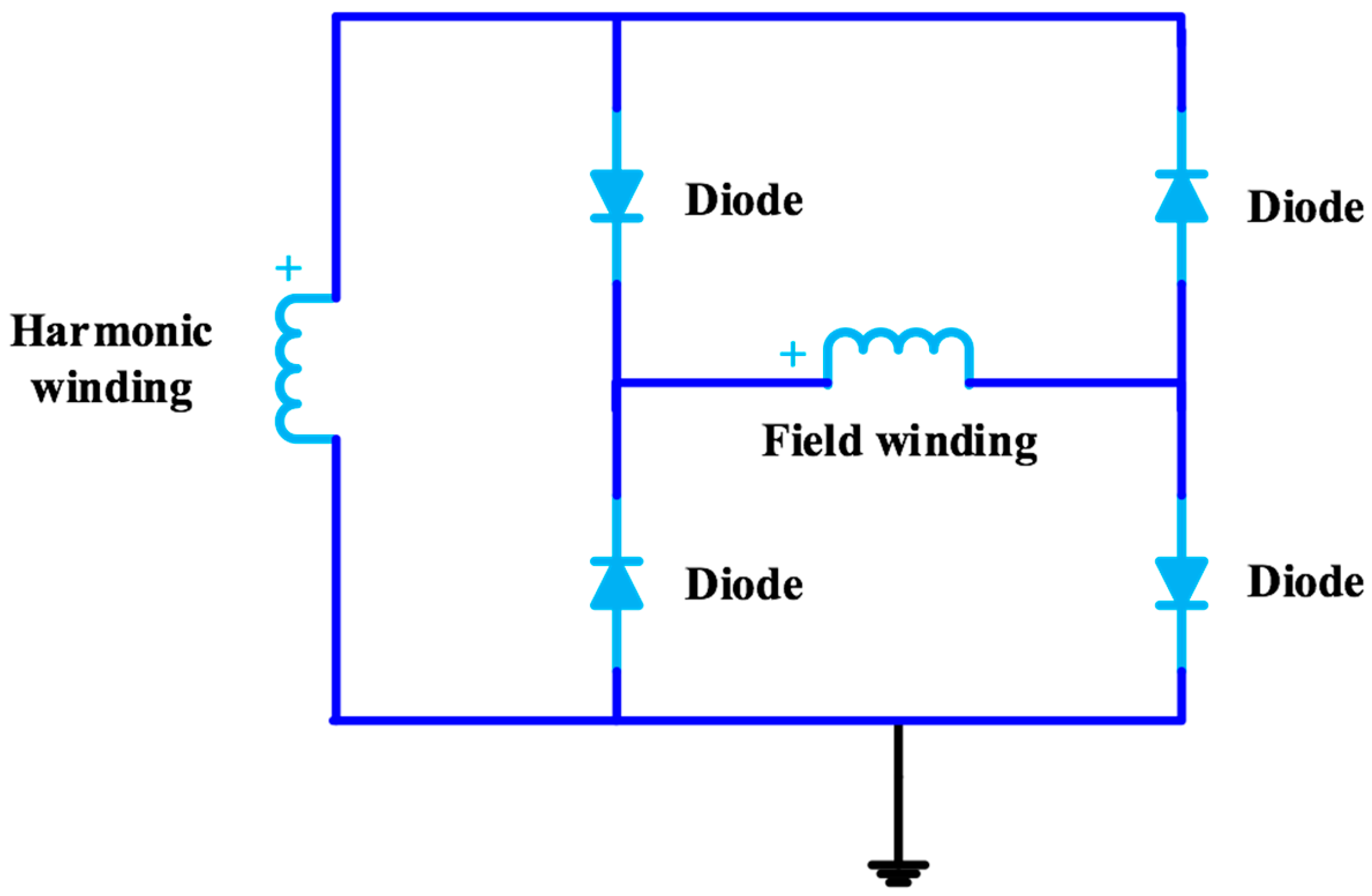
2.2. Working Principle
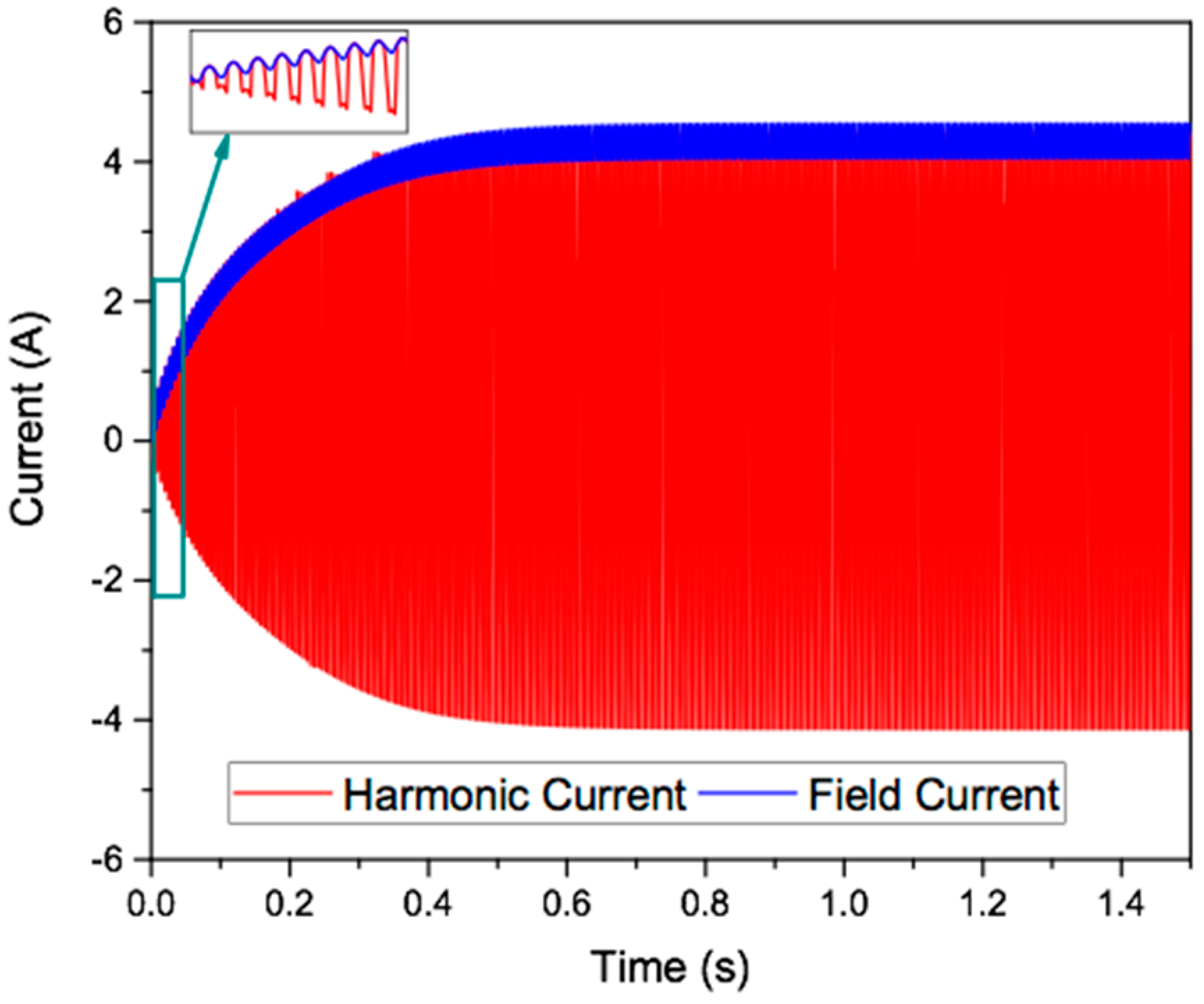
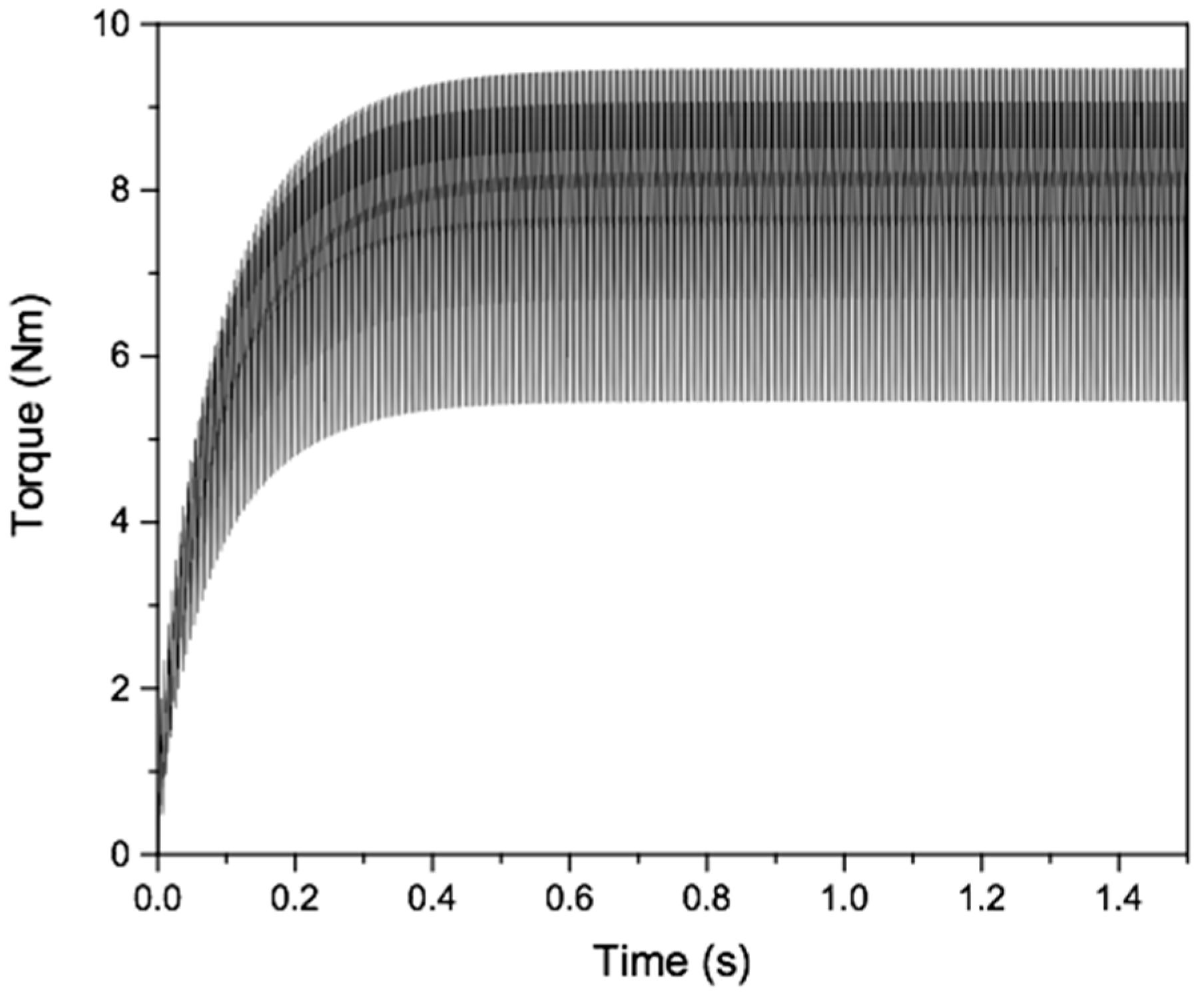
3. Finite Element Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sun, L.; Gao, X.; Yao, F.; An, Q.; Lipo, T. A new type of harmonic current excited brushless synchronous machine based on an open winding pattern. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 2366–2373. [Google Scholar]
- Yao, F.; Sun, D.; Sun, L.; Lipo, T.A. Dual Third-Harmonic-Current Excitation Principle of a Brushless Synchronous Machine Based on Double Three-Phase Armature Windings. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–4. [Google Scholar]
- Di Gioia, A.; Brown, I.P.; Nie, Y.; Knippel, R.; Ludois, D.C.; Dai, J.; Hagen, S.; Alteheld, C. Design and Demonstration of a Wound Field Synchronous Machine for Electric Vehicle Traction with Brushless Capacitive Field Excitation. IEEE Trans. Ind. Appl. 2018, 54, 1390–1403. [Google Scholar] [CrossRef]
- Kano, Y. Design optimization of brushless synchronous machines with wound-field excitation for hybrid electric vehicles. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 2769–2775. [Google Scholar]
- Stancu, C.; Ward, T.; Rahman, K.M.; Dawsey, R.; Savagian, P. Separately Excited Synchronous Motor with Rotary Transformer for Hybrid Vehicle Application. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 1754–1761. [Google Scholar]
- Ruuskanen, V.; Niemel, M.; Pyrhonen, J.; Kanerva, S.; Kaukonen, J. Kaukonen, Modelling the brushless excitation system for a synchronous machine. IET Electr. Power Appl. 2009, 3, 231–239. [Google Scholar] [CrossRef]
- Zhu, X.Y.; Cheng, M.; Zhao, W.X.; Zhang, J.Z.; Hua, W. An Overview of Hybrid Excited Electric Machine Capable of Field Control. Trans. China Electrotech. Soc. 2008, 23, 30–39. [Google Scholar]
- Ayub, M.; Hussain, A.; Jawad, G.; Kwon, B. Brushless Operation of a Wound-Field Synchronous Machine Using a Novel Winding Scheme. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Khan, S.; Bukhari, S.S.H.; Ro, J. Design and Analysis of a 4-kW Two-Stack Coreless Axial Flux Permanent Magnet Synchronous Machine for Low-Speed Applications. IEEE Access 2019, 7, 173848–173854. [Google Scholar] [CrossRef]
- Yao, F.; An, Q.; Sun, L.; Lipo, T.A. Performance Investigation of a Brushless Synchronous Machine with Additional Harmonic Field Windings. IEEE Trans. Ind. Electron. 2016, 63, 6756–6766. [Google Scholar] [CrossRef]
- Inoue, K.; Yamashita, H.; Nakamae, E.; Fujikawa, T. A brushless self-exciting three-phase synchronous generator utilizing the 5th-space harmonic component of magneto motive force through armature currents. IEEE Trans. Energy Convers. 1992, 7, 517–524. [Google Scholar] [CrossRef]
- Yao, F.; An, Q.; Sun, L.; Illindala, M.S.; Lipo, T.A. Optimization design of stator harmonic windings in brushless synchronous machine excited with double-harmonic-windings. In Proceedings of the International Energy and Sustainability Conference (IESC), Farmingdale, NY, USA, 19–20 October 2017; pp. 1–6. [Google Scholar]
- Ayub, M.; Bukhari, S.S.H.; Jawad, G.; Kwon, B.-I. Reluctance Torque Utilization to Improve the Starting and Average Torques of a Brushless Wound Field Synchronous Machine. In Proceedings of the 19th International Symposium on Applied Electromagnetics and Mechanics (ISEM 2019), Nanjing, China, 15–18 September 2019. [Google Scholar]
- An, Q.; Gao, X.; Yao, F.; Sun, L.; Lipo, T. The structure optimization of novel harmonic current excited brushless synchronous machines based on open winding pattern. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 1754–1761. [Google Scholar]
- Ayub, M.; Bukhari, S.S.H.; Jawad, G.; Kwon, B.-I. Brushless wound field synchronous machine with third-harmonic field excitation using a single inverter. Electr. Eng. 2019, 101, 165–173. [Google Scholar] [CrossRef]
- Ali, Q.; Lipo, T.A.; Kwon, B.-I. Design and analysis of a novel brushless wound rotor synchronous machine. IEEE Trans. Magn. 2015, 51, 1. [Google Scholar] [CrossRef]
- Ayub, M.; Atiq, S.; Sirewal, G.J.; Kwon, B. Fault-Tolerant Operation of Wound Field Synchronous Machine Using Coil Switching. IEEE Access 2019, 7, 67130–67138. [Google Scholar] [CrossRef]
- Ayub, M.; Jawad, G.; Kwon, B. Consequent-Pole Hybrid Excitation Brushless Wound Field Synchronous Machine with Fractional Slot Concentrated Winding. IEEE Trans. Magn. 2019, 55, 1–5. [Google Scholar] [CrossRef]
- Jawad, G.; Ali, Q.; Lipo, T.A.; Kwon, B.I. Novel brushless wound rotor synchronous machine with zero-sequence third-harmonic field excitation. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Ali, Q.; Bukhari, S.S.H.; Atiq, S. Variable-speed, sub-harmonically excited BL-WRSM avoiding unbalanced radial force. Electr. Eng. 2019, 101, 251–257. [Google Scholar] [CrossRef]
- Ayub, M.; Sirewal, G.J.; Bukhari, S.S.H.; Kwon, B.-I. Brushless wound rotor synchronous machine with third-harmonic field excitation. Electr. Eng. 2019, 102, 259–265. [Google Scholar] [CrossRef]
- Yao, F.; An, Q.; Gao, X.; Sun, L.; Lipo, T.A. Principle of operation and performance of a synchronous machine employing a new harmonic excitation scheme. IEEE Trans. Ind. Appl. 2015, 51, 3890–3898. [Google Scholar] [CrossRef]
- Li, Z.; Zang, C.; Zeng, P.; Yu, H.; Li, S.; Bian, J. Control of a Grid-Forming Inverter Based on Sliding-Mode and Mixed H2/H∞ Control. IEEE Trans. Ind. Appl. 2017, 64, 3862–3872. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Conventional Brushed WRSM | Proposed Brushless WRSM |
|---|---|---|
| Machine poles/stator slots | 4/18 | 4/18 |
| Stator outer diameter | 130 mm | 130 mm |
| Rotor outer diameter | 79 mm | 79 mm |
| Stack length | 120 mm | 120 mm |
| Field winding no. of turns | 140 | 140 |
| Harmonic winding no. of turns | - | 14 |
| Armature winding no. of turns | 250 | 250 |
| Power | 700 W | 690 W |
| Voltage | 58 V | 56.5 V |
| Efficiency | 93% | 91% |
| Core loss | 35 | 40 W |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bukhari, S.S.H.; Sirewal, G.J.; Chachar, F.A.; Ro, J.-S. Dual-Inverter-Controlled Brushless Operation of Wound Rotor Synchronous Machines Based on an Open-Winding Pattern. Energies 2020, 13, 2205. https://doi.org/10.3390/en13092205
Bukhari SSH, Sirewal GJ, Chachar FA, Ro J-S. Dual-Inverter-Controlled Brushless Operation of Wound Rotor Synchronous Machines Based on an Open-Winding Pattern. Energies. 2020; 13(9):2205. https://doi.org/10.3390/en13092205
Chicago/Turabian StyleBukhari, Syed Sabir Hussain, Ghulam Jawad Sirewal, Faheem Akhtar Chachar, and Jong-Suk Ro. 2020. "Dual-Inverter-Controlled Brushless Operation of Wound Rotor Synchronous Machines Based on an Open-Winding Pattern" Energies 13, no. 9: 2205. https://doi.org/10.3390/en13092205