Low Voltage Battery Management System with Internal Adaptive Charger and Fuzzy Logic Controller


Abstract
:1. Introduction
2. LV-BMS Architecture
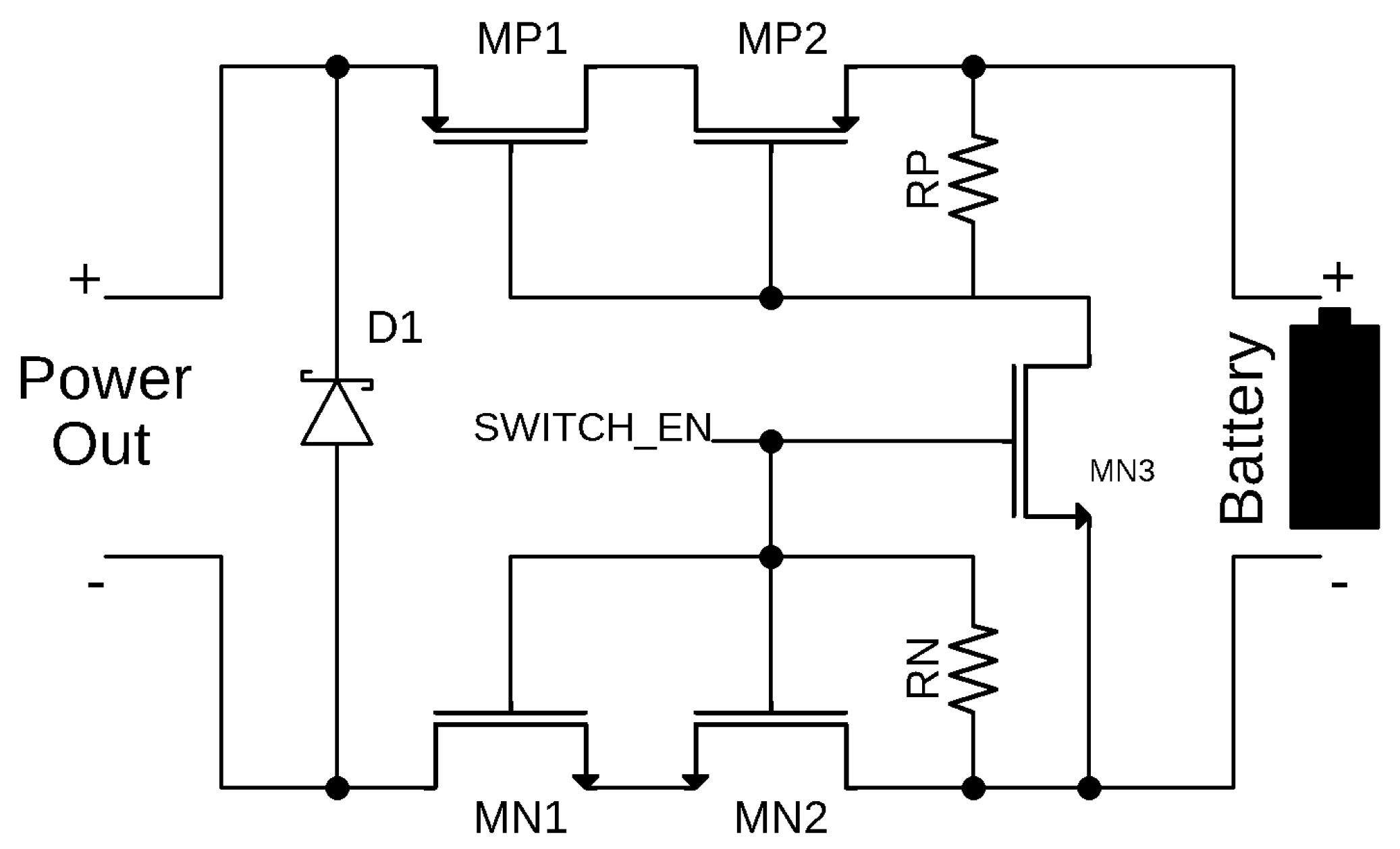
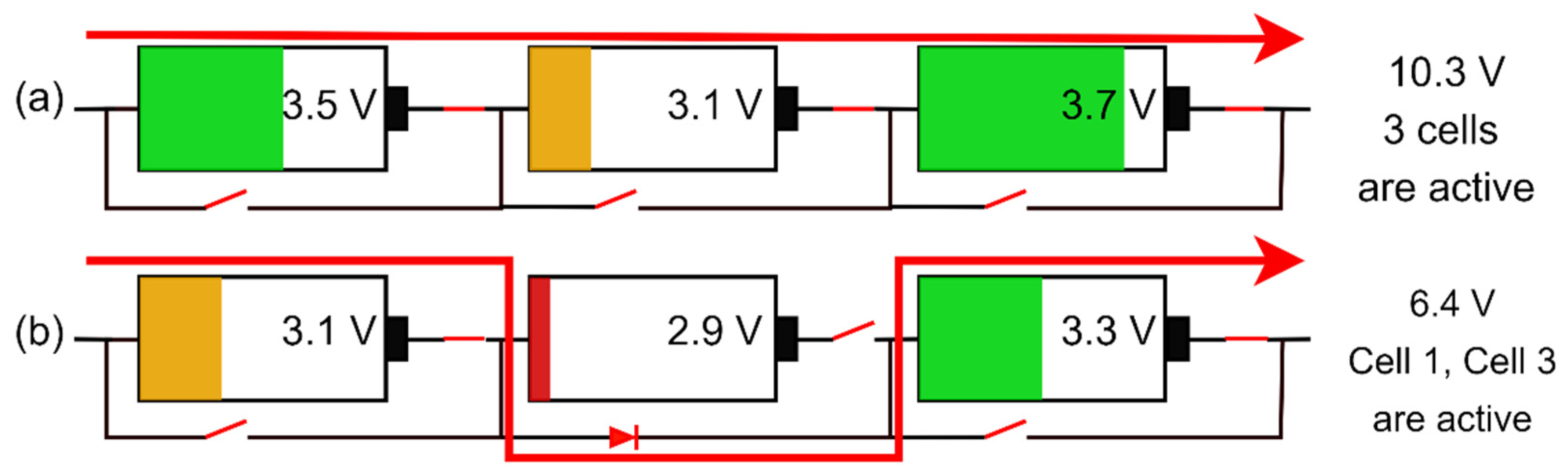
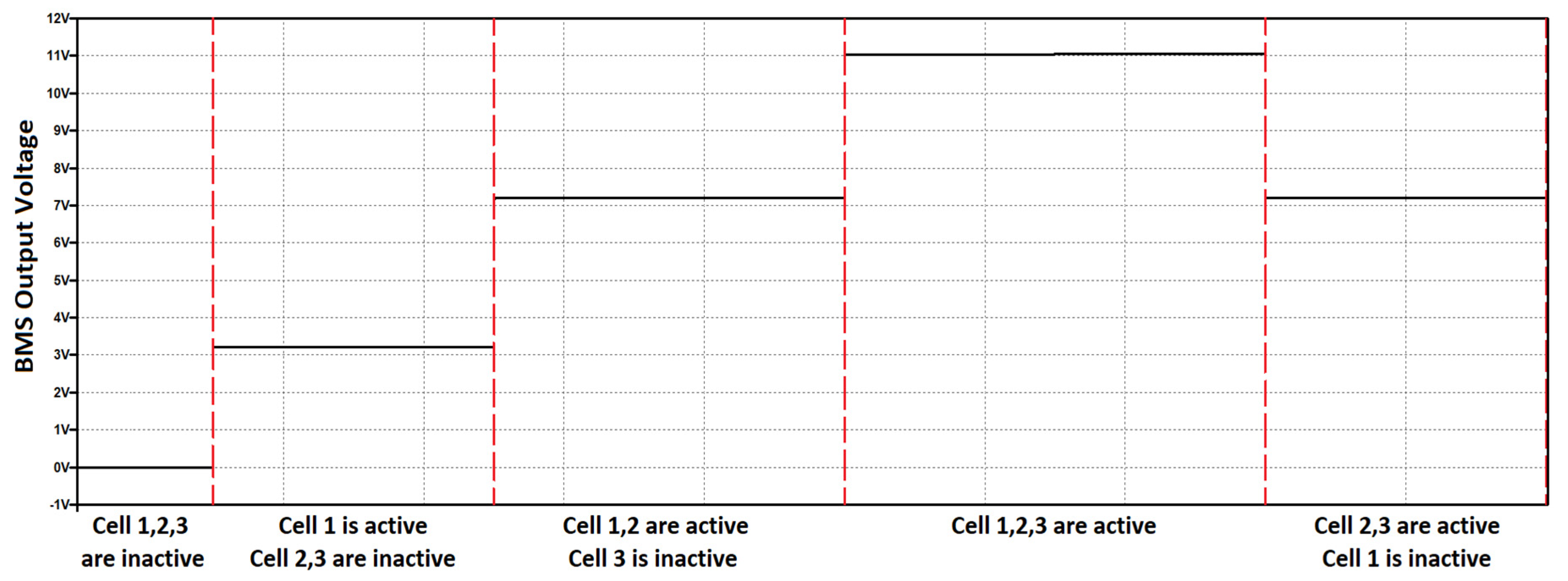
2.1. Battery Switching Unit
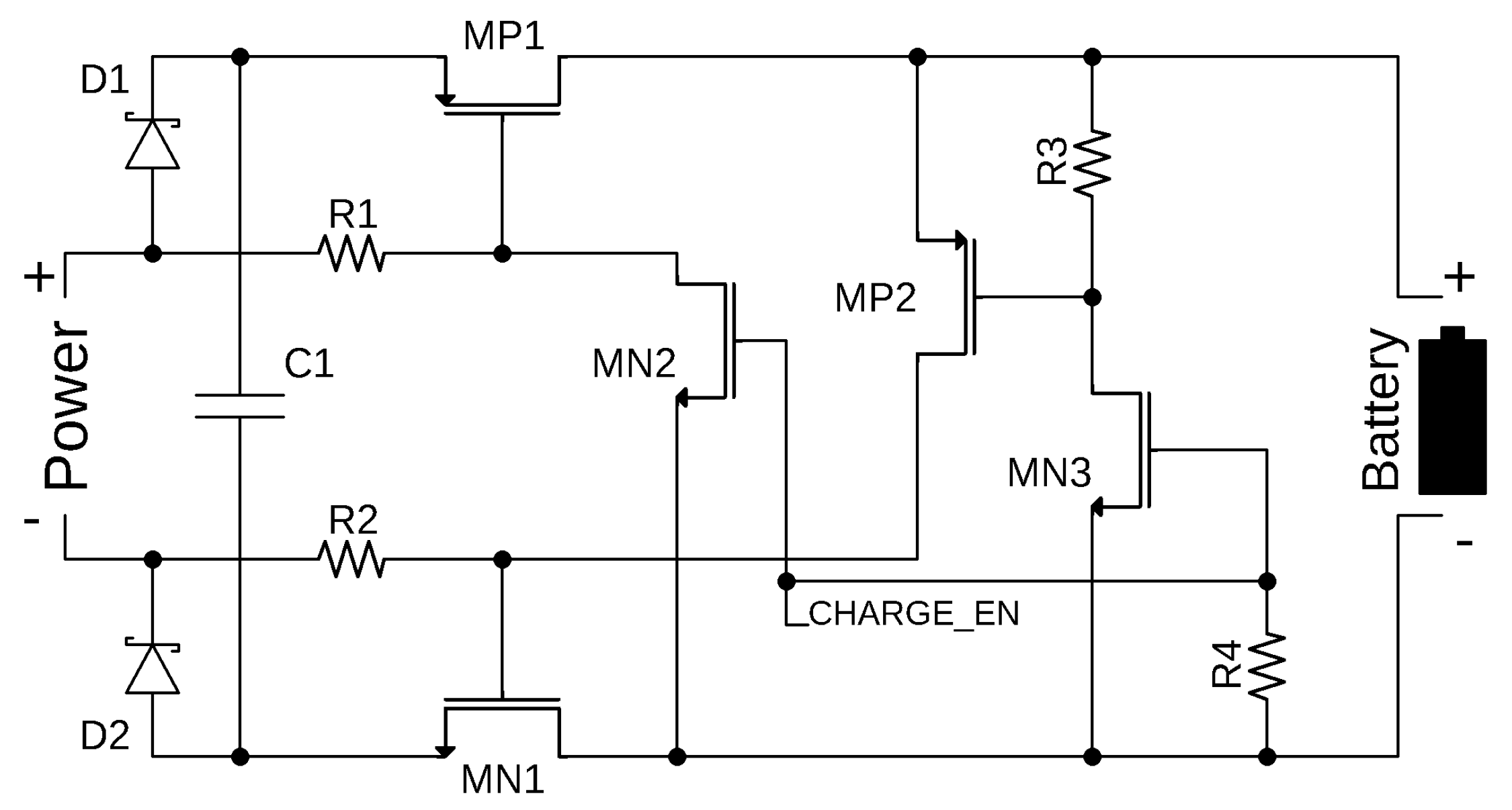
2.2. Battery Charging Unit
2.3. Battery Control Unit and Battery Measurement Unit
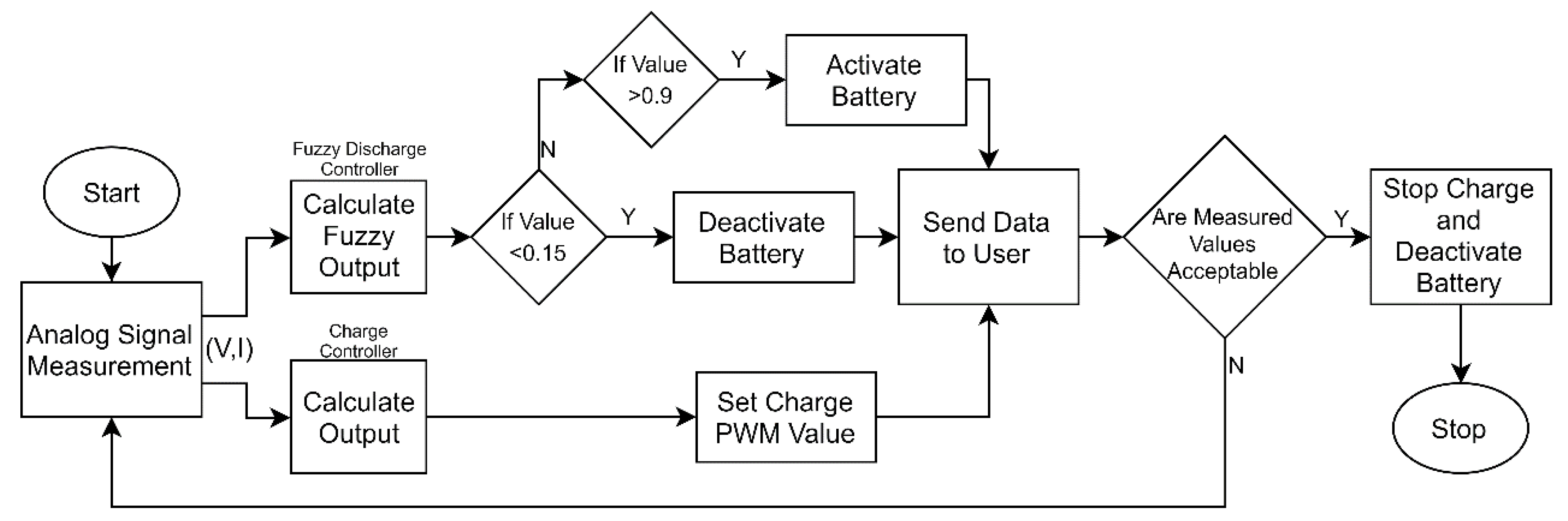
3. LV-BMS Control Algorithms
3.1. Discharge Control
3.1.1. Threshold Method
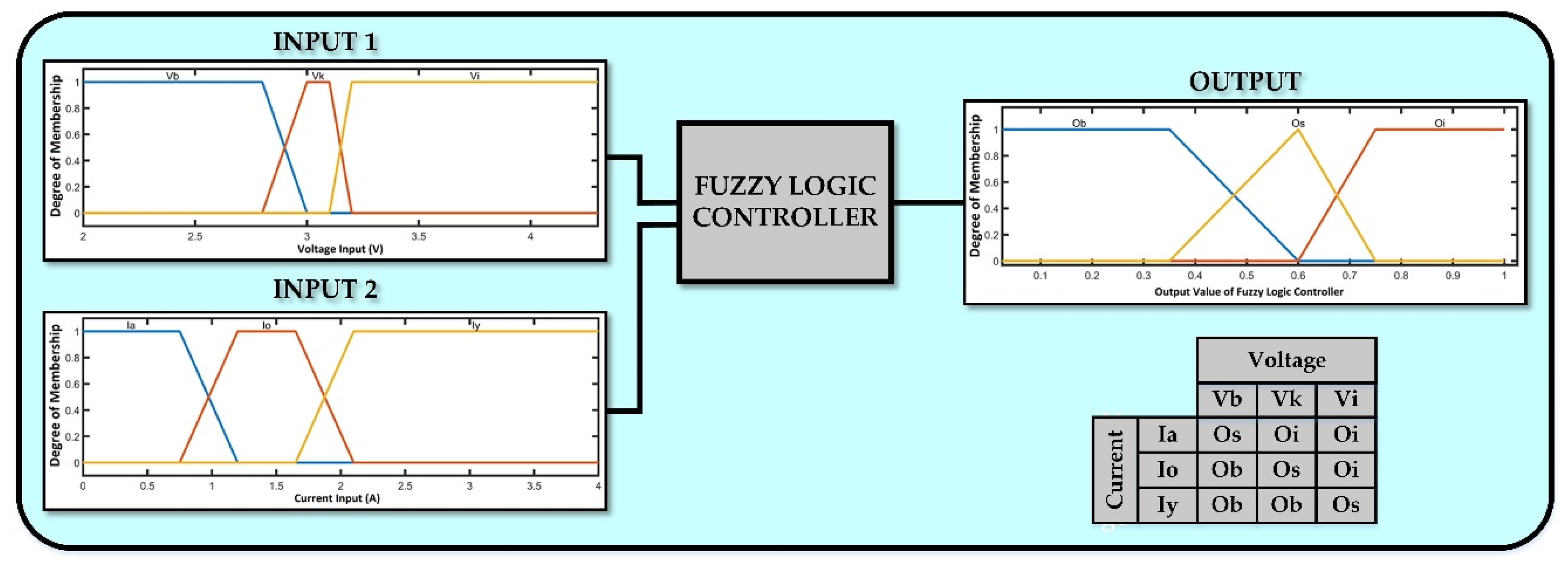
3.1.2. Fuzzy Logic Controller
3.2. Charge Control
3.2.1. PID Control
3.2.2. Fuzzy Logic Control
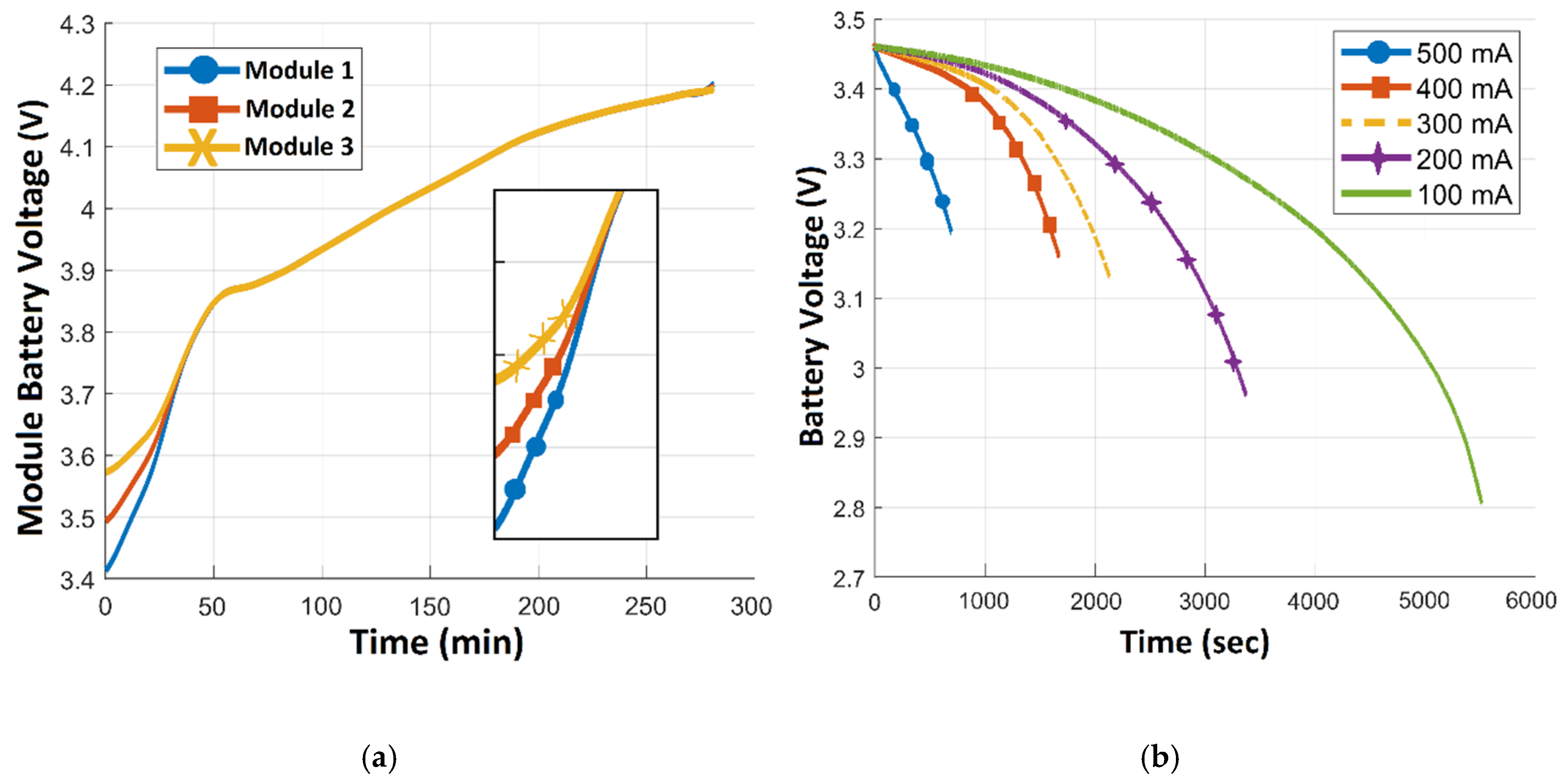
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Teofilo, V.L.; Isaacson, M.J.; Higgins, R.L.; Cuellar, E.A. Advanced Lithium Ion Solid Polymer Electrolyte battery development. IEEE Aerosp. Electron. Syst. Mag. 1999, 14, 43–47. [Google Scholar] [CrossRef]
- Horiba, T. Lithium-ion battery systems. Proc. IEEE 2014, 102, 935–950. [Google Scholar] [CrossRef]
- Asumadu, J.A.; Haque, M.; Vogel, H.; Willards, C. Precision battery management system. In Proceedings of the Conference Record—IEEE Instrumentation and Measurement Technology Conference, Ottawa, ON, Canada, 16–19 May 2005; pp. 1317–1320. [Google Scholar]
- Rivera-Barrera, J.P.; Muñoz-Galeano, N.; Sarmiento-Maldonado, H.O. SoC estimation for lithium-ion batteries: Review and future challenges. Electronics 2017, 6, 102. [Google Scholar] [CrossRef] [Green Version]
- Haq, I.N.; Leksono, E.; Iqbal, M.; Sodami, F.X.N.; Tapran, N.; Kurniadi, D.; Yuliarto, B. Development of battery management system for cell monitoring and protection. In Proceedings of the 2014 International Conference on Electrical Engineering and Computer Science, ICEECS 2014, Kuta, Indonesia, 24–25 November 2014; pp. 203–208. [Google Scholar]
- Man, X.C.; Wu, L.J.; Zhang, X.M.; Ma, T.K.; Jia, W. A high precision multi-cell battery voltage detecting circuit for battery management systems. In Proceedings of the IEEE Vehicular Technology Conference, Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar]
- Giegerich, M.; Akdere, M.; Freund, C.; Fühner, T.; Grosch, J.L.; Koffel, S.; Schwarz, R.; Waldhör, S.; Wenger, M.; Lorentz, V.R.H.; et al. Open, flexible and extensible battery management system for lithium-ion batteries in mobile and stationary applications. In Proceedings of the IEEE International Symposium on Industrial Electronics, Santa Clara, CA, USA, 8–10 June 2016; pp. 991–996. [Google Scholar]
- Brandl, M.; Gall, H.; Wenger, M.; Lorentz, V.; Giegerich, M.; Baronti, F.; Fantechi, G.; Fanucci, L.; Roncella, R.; Saletti, R.; et al. Batteries and battery management systems for electric vehicles. In Proceedings of the 2012 Design, Automation and Test in Europe Conference & Exhibition (DATE), Dresden, Germany, 12–16 March 2012; pp. 1–6. [Google Scholar]
- Liu, P.; Zhu, H.H.; Chen, J.; Li, G.Y. A distributed management system for lithium ion battery pack. In Proceedings of the 28th Chinese Control and Decision Conference, CCDC 2016, Yinchuan, China, 28–30 May 2016; pp. 3997–4002. [Google Scholar]
- Vitols, K. Redesign of passive balancing battery management system to active balancing with integrated charger converter. In Proceedings of the Biennial Baltic Electronics Conference (BEC), Tallinn, Estonia, 6–8 October 2014; pp. 241–244. [Google Scholar]
- Liu, V.T.; Hsieh, Y.C.; Wu, J.M.; Lin, C.M. New type equalization circuit and management system of Li-ion battery. In Proceedings of the IEEE International Conference on Control and Automation, ICCA, Taichung, Taiwan, 18–20 June 2014; pp. 1056–1060. [Google Scholar]
- Monteiro, V.; Alves, P.; Meléndez, A.A.N.; Couto, C.; Afonso, J.L. A novel modular voltage balancing topology for active battery management system. In Proceedings of the IEEE International Symposium on Industrial Electronics, Santa Clara, CA, USA, 8–10 June 2016; pp. 793–798. [Google Scholar]
- Ran, F.; Xu, H.; Ji, Y.; Qin, J.; Li, W. An active balancing circuit for lithium battery management system with optoelectronic switches. In Proceedings of the TENCON 2015—2015 IEEE Region 10 Annual International Conference, Macao, China, 1–4 November 2016; pp. 1–5. [Google Scholar]
- Zheng, Y.; He, F.; Wang, W. A method to identify lithium battery parameters and estimate SOC based on different temperatures and driving conditions. Electronics 2019, 8, 1391. [Google Scholar] [CrossRef] [Green Version]
- Kim, T.; Qiao, W.; Qu, L. Series-connected self-reconfigurable multicell battery. In Proceedings of the 2011 Twenty-Sixth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 6–11 March 2011; pp. 1382–1387. [Google Scholar]
- Kim, T.; Qiao, W.; Qu, L. A series-connected self-reconfigurable multicell battery capable of safe and effective charging/discharging and balancing operations. In Proceedings of the 2012 Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 Feburary 2012; pp. 2259–2264. [Google Scholar]
- Li, Y.; Han, Y. A Module-Integrated Distributed Battery Energy Storage and Management System. IEEE Trans. Power Electron. 2016, 31, 8260–8270. [Google Scholar] [CrossRef]
- Ci, S.; Lin, N.; Wu, D. Reconfigurable Battery Techniques and Systems: A Survey. IEEE Access 2016, 4, 1175–1189. [Google Scholar] [CrossRef]
- Baronti, F.; Fantechi, G.; Roncella, R.; Saletti, R. Design of a module switch for battery pack reconfiguration in high-power applications. In Proceedings of the IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 1330–1335. [Google Scholar]
- Visairo, H.; Kumar, P. A reconfigurable battery pack for improving power conversion efficiency in portable devices. In Proceedings of the 7th International Caribbean Conference on Devices, Circuits and Systems, ICCDCS, Cancun, Mexico, 28–30 April 2008; pp. 1–6. [Google Scholar]
- Ur Rehman, M.M.; Zhang, F.; Evzelman, M.; Zane, R.; Maksimovic, D. Control of a series-input, parallel-output cell balancing system for electric vehicle battery packs. In Proceedings of the 2015 IEEE 16th Workshop on Control and Modeling for Power Electronics, COMPEL 2015, Vancouver, BC, Canada, 12–15 July 2015; pp. 1–7. [Google Scholar]
- Gunlu, G. Dynamically Reconfigurable Independent Cellular Switching Circuits for Managing Battery Modules. IEEE Trans. Energy Convers. 2017, 32, 194–201. [Google Scholar] [CrossRef]
- Pellegrino, L.; Micolano, E. Enhance available battery energy by means of a new management system control strategy. In Proceedings of the AEIT 2016—International Annual Conference: Sustainable Development in the Mediterranean Area, Energy and ICT Networks of the Future, Capri, Italy, 5–7 October 2016; pp. 1–6. [Google Scholar]
- Manenti, A.; Abba, A.; Merati, A.; Savaresi, S.M.; Geraci, A. A new BMS architecture based on cell redundancy. IEEE Trans. Ind. Electron. 2011, 58, 4314–4322. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Joel, Y.S.; Saikumar, H.V.; Patange, S.S.R. Design & performance analysis of Fuzzy based MPPT control using two-switch non inverting Buck-Boost converter. In Proceedings of the International Conference on Electrical Power and Energy Systems, ICEPES 2016, Bhopal, India, 14–16 December 2016; pp. 414–419. [Google Scholar]
- Ugale, C.P.; Dixit, V.V. Buck-boost converter using Fuzzy logic for low voltage solar energy harvesting application. In Proceedings of the 2017 11th International Conference on Intelligent Systems and Control, ISCO 2017, Coimbatore, India, 5–6 January 2017; pp. 413–417. [Google Scholar]
- Goksu, O.F.; Acar Vural, R. Battery management module with active balancing and cell switching. In Proceedings of the 2018 6th International Conference on Control Engineering and Information Technology, CEIT 2018, Istanbul, Turkey, 25–27 October 2018; pp. 617–622. [Google Scholar]
- Zhang, S.; Zhang, C.; Xiong, R.; Zhou, W. Study on the optimal charging strategy for lithium-ion batteries used in electric vehicles. Energies 2014, 7, 6783–6797. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wang, Y.; Rong, Y.; Li, Z.; Fantao, L. Study on the optimal charging method for lithium-ion batteries used in electric vehicles. Energy Procedia 2016, 88, 1013–1017. [Google Scholar] [CrossRef] [Green Version]
- Omariba, Z.B.; Zhang, L.; Sun, D. Review on health management system for lithium-ion batteries of electric vehicles. Electronics 2018, 7, 72. [Google Scholar] [CrossRef] [Green Version]
- Sung, W.; Lee, J. Implementation of SOH estimator in automotive BMSs using recursive least-squares. Electronics 2019, 8, 1237. [Google Scholar] [CrossRef] [Green Version]
- Aryanfar, A.; Brooks, D.; Merinov, B.V.; Goddard, W.A.; Colussi, A.J.; Hoffmann, M.R. Dynamics of lithium dendrite growth and inhibition: Pulse charging experiments and monte carlo calculations. J. Phys. Chem. Lett. 2014, 5, 1721–1726. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amanor-Boadu, J.M.; Guiseppi-Elie, A.; Sánchez-Sinencio, E. The impact of pulse charging parameters on the life cycle of lithium-ion polymer batteries. Energies 2018, 11, 2162. [Google Scholar] [CrossRef] [Green Version]
- Ali, M.U.; Zafar, A.; Nengroo, S.H.; Hussain, S.; Kim, H.J. Effect of sensors sensitivity on lithium-ion battery modeled parameters and state of charge: A comparative study. Electronics 2019, 8, 709. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.R.; Kang, J.W.; Eom, T.H.; Kim, J.M.; Lee, J.; Won, C.Y. An adaptive rapid charging method for lithium-ion batteries with compensating cell degradation behavior. Appl. Sci. 2018, 8, 1251. [Google Scholar] [CrossRef] [Green Version]
- Fang, H.; Depcik, C.; Lvovich, V. Optimal pulse-modulated Lithium-ion battery charging: Algorithms and simulation. J. Energy Storage 2018, 15, 359–367. [Google Scholar] [CrossRef]
- Banguero, E.; Correcher, A.; Pérez-Navarro, Á.; Morant, F.; Aristizabal, A. A Review on Battery Charging and Discharging Control Strategies: Application to Renewable Energy Systems. Energies 2018, 11, 1021. [Google Scholar] [CrossRef] [Green Version]
- Umair Ali, M.; Hussain Nengroo, S.; Adil Khan, M.; Zeb, K.; Ahmad Kamran, M.; Kim, H.-J. A Real-Time Simulink Interfaced Fast-Charging Methodology of Lithium-Ion Batteries under Temperature Feedback with Fuzzy Logic Control. Energies 2018, 11, 1122. [Google Scholar] [CrossRef] [Green Version]
- Tephiruk, N.; Kanokbannakorn, W.; Kerdphol, T.; Mitani, Y.; Hongesombut, K. Fuzzy Logic Control of a Battery Energy Storage System for Stability Improvement in an Islanded Microgrid. Sustainability 2018, 10, 1645. [Google Scholar] [CrossRef] [Green Version]
- Iancu, I. A Mamdani Type Fuzzy Logic Controller. In Fuzzy Logic—Controls, Concepts, Theories and Applications; InTech: Rijeka, Crotia, 2012; pp. 325–350. [Google Scholar]
- Sakti, I. Methodology of fuzzy logic with mamdani fuzzy models applied to the microcontroller. In Proceedings of the 2014 1st International Conference on Information Technology, Computer, and Electrical Engineering, Semarang, Indonesia, 8 November 2014; pp. 93–98. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Model | Manufacturer |
|---|---|---|
| PMOS MOSFET | IRLML6402 | International Rectifier |
| NMOS MOSFET | IRLML2502 | International Rectifier |
| NPN Transistor | MMBT2222A | Taitron |
| Diode | SS26 Schottky | Hottech |
| Optocoupler | PC817 | Sharp |
| Microcontroller | STM32F103 | STM |
| Amplifier | INA214 | Texas Instruments |
| Shunt resistor | 3 mΩ | Isabellenhütte |
| Microcontroller | Atmega48PA | Atmel |
| Device | VDS (V) | Rds (Ω) | VGS (V) | IDS (A) |
|---|---|---|---|---|
| IRLML6402 | −20 | 0.065 | −0.6 | −3.7 |
| IRLML2502 | 20 | 0.045 | 1 | 4.2 |
| Methods | 500 mA | 400 mA | 300 mA | 200 mA | 100 mA |
|---|---|---|---|---|---|
| FLC Low Voltage Limit (V) | 3.2 V | 3.15 V | 3 V | 2.95 V | 2.9 V |
| FLC Threshold (time (s)) | 7610 | 12,630 | 15,940 | 21,500 | 30,650 |
| Default Threshold (time (s)) | 7610 | 12,200 | 14,080 | 17,560 | 21,660 |
| Increase in Usage Time (%) | 0 | 4 | 13 | 22 | 42 |
| Reference | Battery Conf. | Internal Charger | Charge Voltage | Battery Balancer | Voltage Monitor |
|---|---|---|---|---|---|
| [3] | Fixed | No | - | No | Multi Cell Voltage Divider |
| [5] | Modular | No | - | No | Multi Cell Voltage Divider |
| [7] | Fixed | No | - | No | LTC6804 |
| [13] | Fixed | No | - | Yes | BQ76940 |
| [17] | Modular | Yes | Fixed 24 V | Yes | Multi Cell Voltage Divider |
| LV-BMS | Modular | Yes | 5 V–8 V | Yes | Direct ADC input |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goksu, O.F.; Arabul, A.Y.; Acar Vural, R. Low Voltage Battery Management System with Internal Adaptive Charger and Fuzzy Logic Controller. Energies 2020, 13, 2221. https://doi.org/10.3390/en13092221
Goksu OF, Arabul AY, Acar Vural R. Low Voltage Battery Management System with Internal Adaptive Charger and Fuzzy Logic Controller. Energies. 2020; 13(9):2221. https://doi.org/10.3390/en13092221
Chicago/Turabian StyleGoksu, Omer Faruk, Ahmet Yigit Arabul, and Revna Acar Vural. 2020. "Low Voltage Battery Management System with Internal Adaptive Charger and Fuzzy Logic Controller" Energies 13, no. 9: 2221. https://doi.org/10.3390/en13092221
APA StyleGoksu, O. F., Arabul, A. Y., & Acar Vural, R. (2020). Low Voltage Battery Management System with Internal Adaptive Charger and Fuzzy Logic Controller. Energies, 13(9), 2221. https://doi.org/10.3390/en13092221