Assessment of Wind Turbine Aero-Hydro-Servo-Elastic Modelling on the Effects of Mooring Line Tension via Deep Learning


Abstract
:1. Introduction
- (1)
- Advanced sensing and condition monitoring (CM) provide an effective way of collecting data and detecting failures, but it is unable to explain the inherent driven force on these failures. To date, it is not clear what factors affect the FOWT mooring line tension. To tackle this problem, this paper studies the driven force of mooring line tension based on an advanced AHSE model and deep learning, taking into account different environmental conditions.
- (2)
- The global performance of wind turbine dynamics necessitates a coupled analysis of hydrodynamics, aerodynamics, structural dynamics, controls and so forth, which are highly dependent on environmental conditions. Consequently, traditional parametric studies have difficulty in analysing the influence on the mooring line tension under various conditions. Simply changing environmental parameters and operating conditions will result in an excessive number of case studies in the time domain, prominently increasing computation costs and sometimes are impractical to be realised. To this point, this paper applied deep learning to build a model for investigating the mechanism of mooring line tension. Therefore, the influence of various environmental parameters can be accounted for automatically.
- (3)
- Learned from offshore platforms, it is well known that mooring line tension is driven by the 6 Degree of Freedom (DOF) dynamic responses of the support structure. However, due to the large height-to-width ratio, the contribution from the upper structure, such as the tower and blades of the FOWT on the mechanism of mooring line tension, is not clear [18]. To solve this problem, the inputs of the deep learning model includes the 6-DOF motion responses of the platform and upper structure deflections. These influences are almost unable to be analysed through conventional parametric studies. In this paper, both linear relationships (correlation analysis) and nonlinear relationships (deep learning model) are considered and discussed.
- (4)
- We have focused on direct drive train wind turbines, which are believed to be more popular and suitable for floating wind turbines due to their larger loading capacities. The pitch control for the direct drive train for floating wind turbines has been redeveloped, and its accuracy has been validated against a gearbox wind turbine.
2. Methodology
2.1. AHSE Modelling
2.1.1. Aerodynamics
2.1.2. Hydrodynamics
2.1.3. Structural Dynamics
2.2. Correlation Analysis
2.3. Deep Learning Modelling
- ▪
- ▪
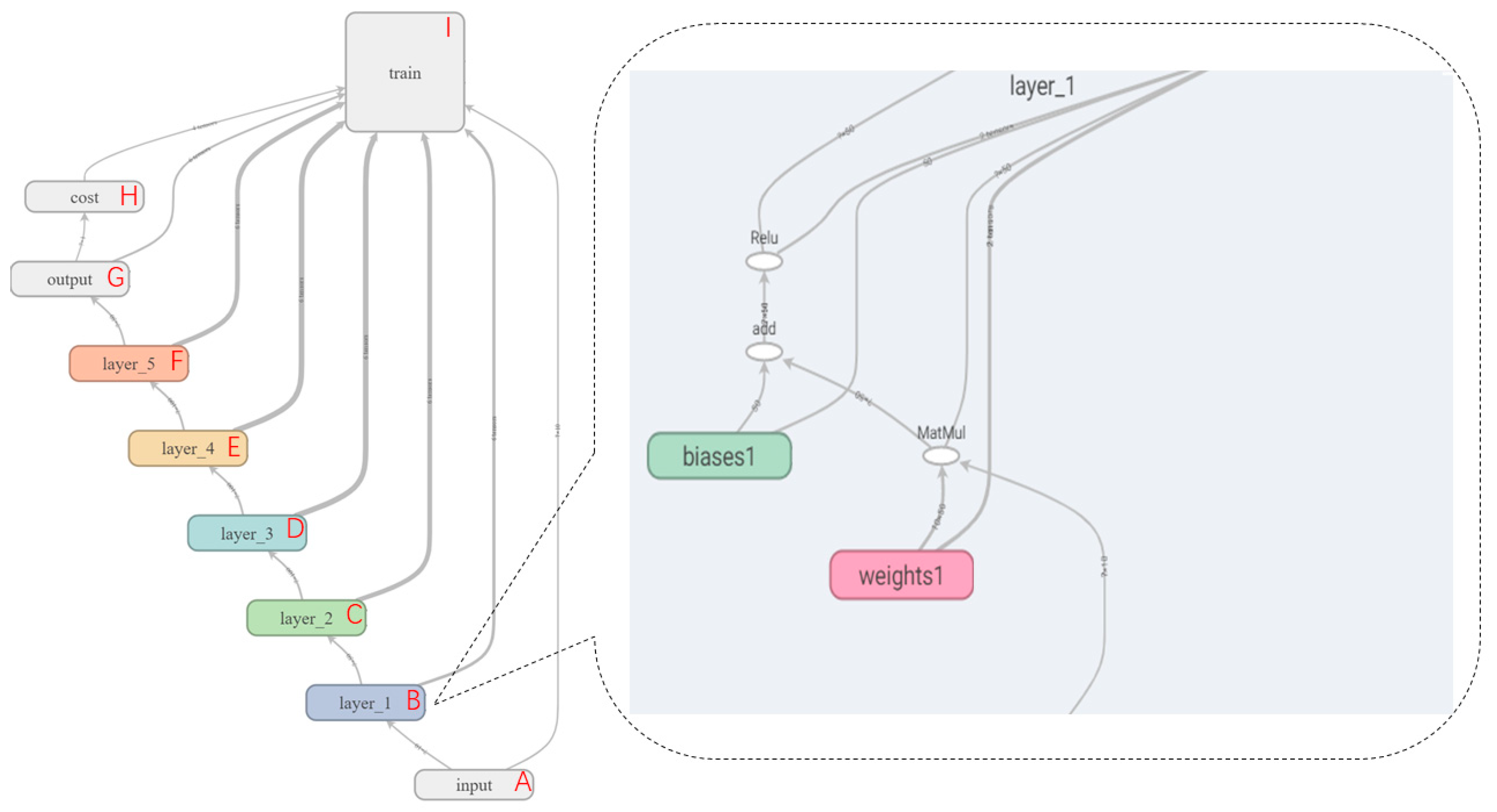
- In the deep learning configuration, each neuron was also determined by a bias (), for which the defaults initial bias was set as zero;
- ▪
- The outputs of the layer were controlled by an activation function (), using the non-linear activation functions of Rectified Linear Unit (ReLU) (see Figure 4B).
3. Wind Turbine Properties
3.1. Structure Specifications
3.2. Direct Drive Wind Turbine
3.2.1. Control methodology
3.2.2. Validation of Control Method
4. Case Studies and Discussion
4.1. Load Cases and Inputs for the Deep Learning Model
4.2. Load Cases and Inputs for the Deep Learning Model
4.3. Level of Significance
4.4. Discussions
4.4.1. Effects of Tower and Blade Flexibility—Slack Mooring Line
4.4.2. Effects of Mooring Configuration—Taut Mooring Line
5. Conclusions
- A deep learning model has been successfully built to rank the level of contributions to predicting the most loaded mooring line tension. Its accuracy has been validated against the nonlinear time-domain method.
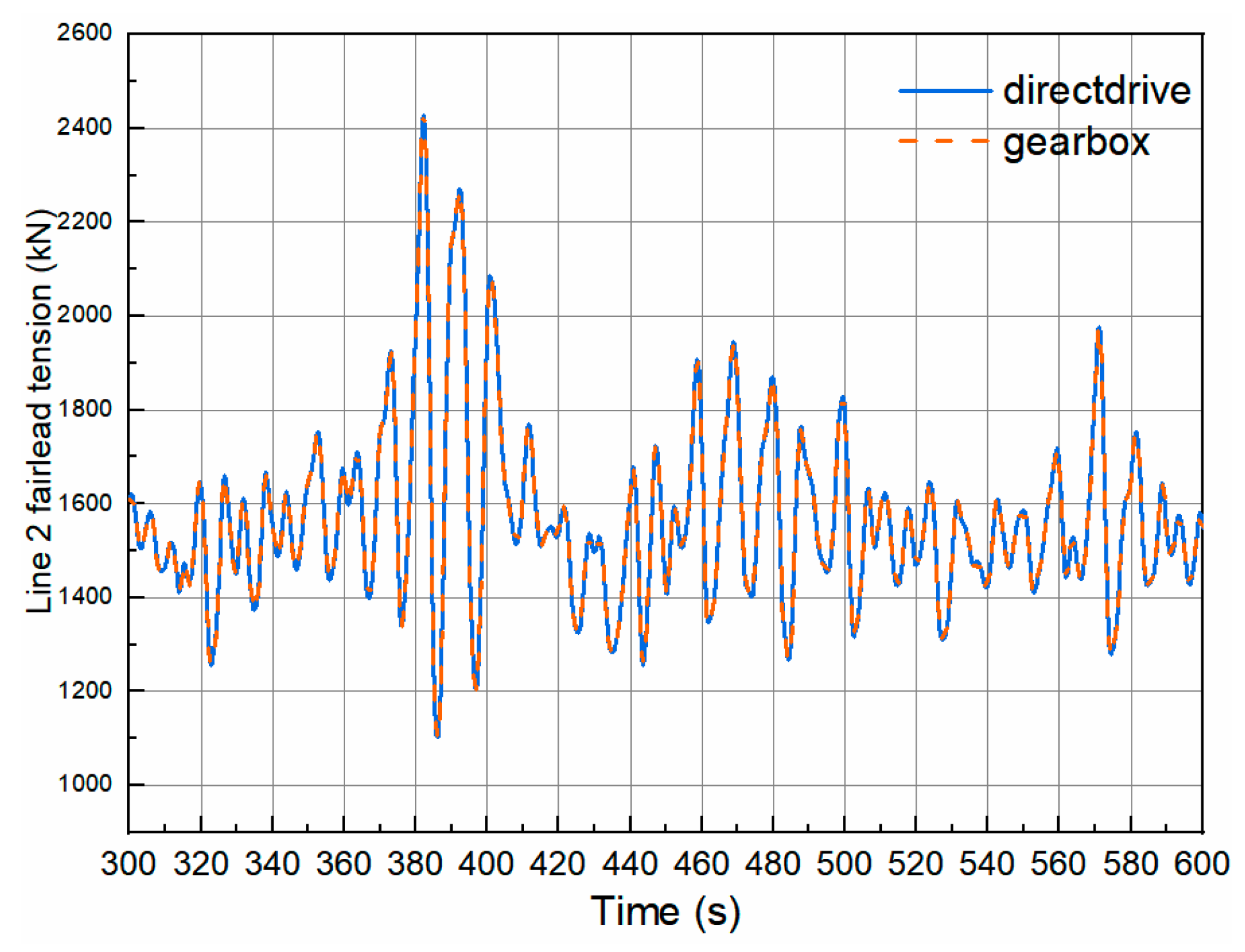
- A numerical model has been developed on blade pitch control for a direct drive train configuration with FOWT, while its accuracy has been validated against gearbox wind turbine. Good agreement has been achieved in terms of blade pitch angles for above-rated wind conditions because of the perfect match of shaft speed.
- For the slack mooring configuration, the most loaded mooring line tension is mainly dominated by the platform surge motion, while the pitch and the heave have almost equal contributions to the tension, but not as important as surge. For taut mooring lines, the most loaded line tension is purely determined by surge, while other parameters are less significant.
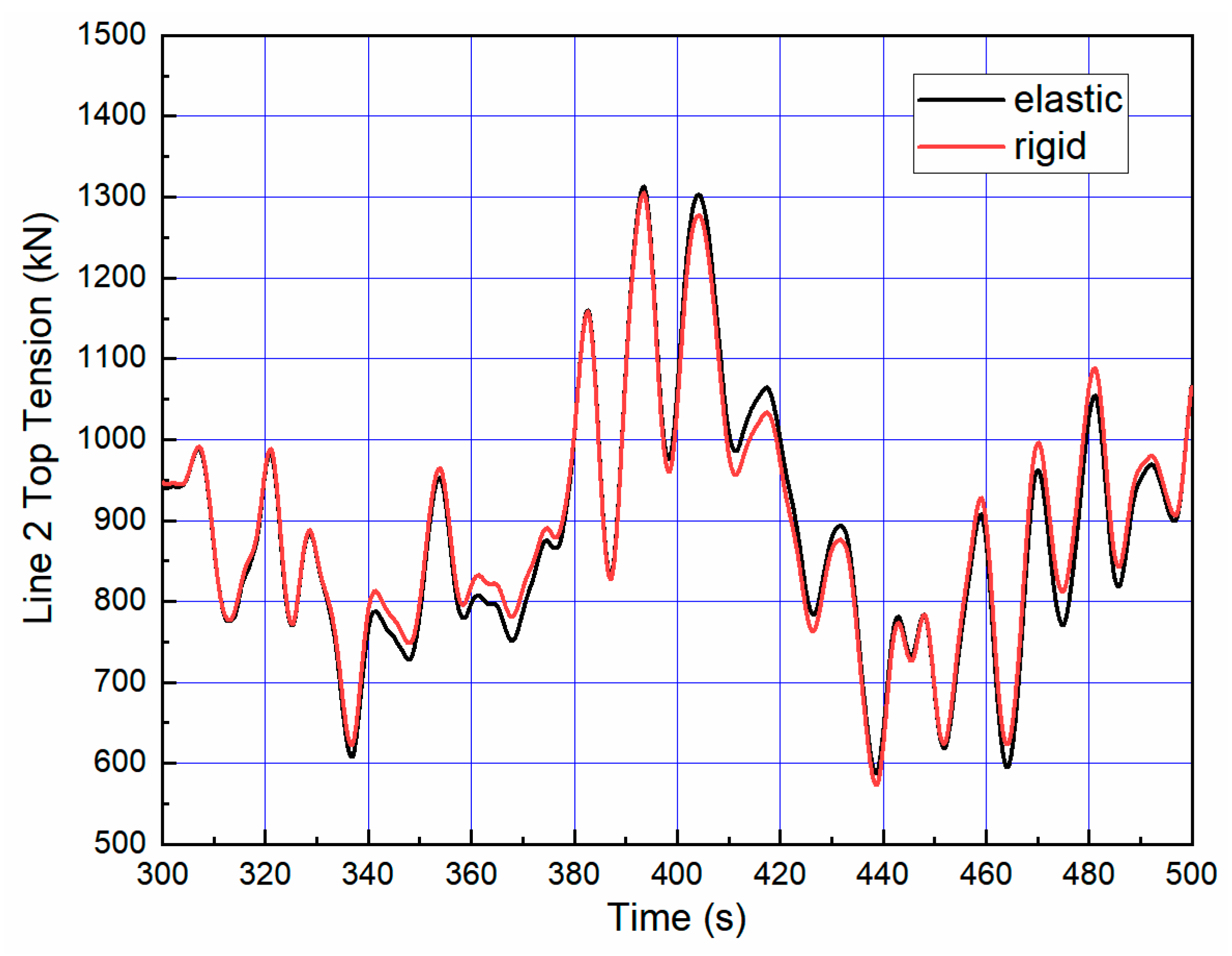
- Compared with surge motion, blade and tower elasticities are insignificant for predicting FOWT most loaded mooring line tension, regardless of the mooring system types (slack or taut).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Latin symbols | |
| A | Wave amplitude |
| bj | Bias associated with neuron j |
| C | Damping matrix |
| Cd | Drag coefficients |
| Cm | Mass coefficients |
| D | Element diameter |
| fi | Original value/Input of neuron j |
| F | Force |
| F1 | 1st-order wave forces |
| F2 | 2nd-order wave forces |
| Fw | Wind induced forces |
| Fext | Wave exciting force |
| Fscaled | Normalized value |
| g | Gravitational acceleration |
| h | Output of neuron j |
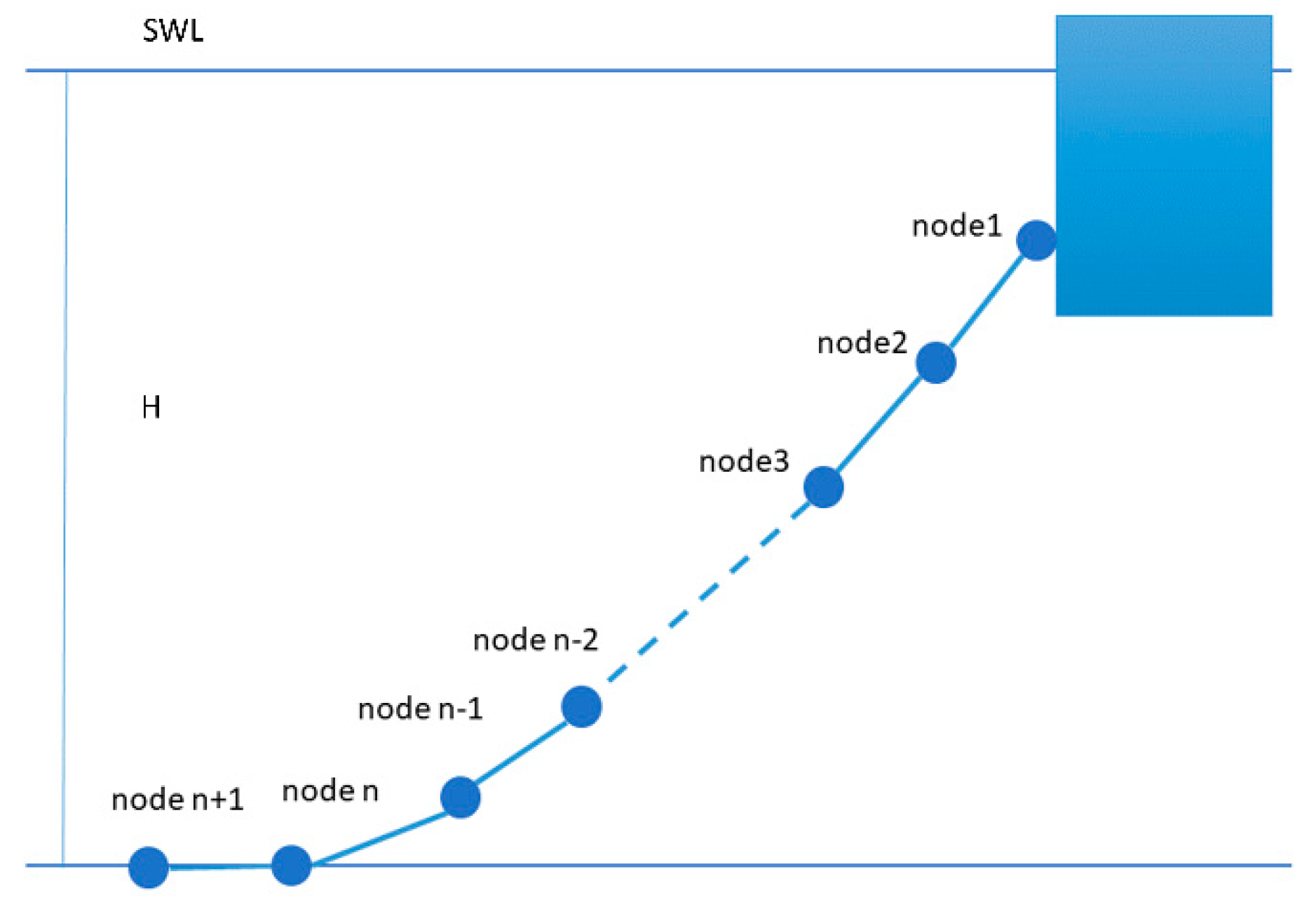
| H | Water depth |
| HNi | Net input of neuron j in the output or deeper hidden layer |
| i, j | Member index |
| k | Wave number |
| K | Hydrostatic stiffness matrix |
| M | Mass matrix |
| Mprediction | Predicted value from the deep learning model |
| Msimulation | Recorded value in simulations |
| max(f) | Maximum value in the span |
| min(f) | Minimum value in the span |
| n | Unit vector |
| p | Number of tests |
| N | Number of individuals |
| P | Feature 1 |
| Q | Feature 2 |
| R | Correlation coefficients |
| Re | the real part |
| s | Integration variable |
| Sb | Body surface |
| Sξ(ω) | Wave spectral density |
| t | Time |
| U | Velocity |
| vij | Weights that linked neuron i and j |
| w(ω) | Fourier transform |
| Wi | Net buoyancy of each segment |
| x, y & z | Space coordinates |
| Greek symbols | |
| ξ | Wave elevation time history |
| φ | Velocity potential |
| φD | Diffracted potential |
| r | Space vector |
| β | Incident wave direction |
| ρ | Water density |
| ω | Circular frequency |
Abbreviations
| AHSE | Aero-hydro-servo-elastic |
| BEM | Blade Element Momentum |
| CFD | Computational fluid dynamics |
| CM | Condition monitoring |
| DOF | Degree of freedom |
| FEA | Finite element analysis |
| FEM | Finite element method |
| FOWT | Floating offshore wind turbine |
| LCs | Load cases |
| MSE | Mean square error |
| NREL | National Renewable Energy Laboratory |
| RAO | Response amplitude operator |
| ReLU | Rectified linear unit |
| SPH | Smoothed particle hydrodynamics |
| SWL | Still-water level |
References
- Wang, X.; Zeng, X.; Yang, X.; Li, J. Feasibility study of offshore wind turbines with hybrid monopile foundation based on centrifuge modeling. Appl. Energy 2018, 209, 127–139. [Google Scholar] [CrossRef]
- Chen, J.; Wang, F.; Stelson, K.A. A mathematical approach to minimizing the cost of energy for large utility wind turbines. Appl. Energy 2018, 228, 1413–1422. [Google Scholar] [CrossRef]
- Waters, L.; Spry, W. Energy Trends December 2018, Section 6: Renewables; Department for Business, Energy & Industrial Strategy: London, UK, 2018.
- Liu, X.; Lu, C.; Li, G.; Godbole, A.; Chen, Y. Effects of aerodynamic damping on the tower load of offshore horizontal axis wind turbines. Appl. Energy 2017, 204, 1101–1114. [Google Scholar] [CrossRef] [Green Version]
- Gao, X.; Wang, T.; Li, B.; Sun, H.; Yang, H.; Han, Z.; Wang, Y.; Zhao, F. Investigation of wind turbine performance coupling wake and topography effects based on LiDAR measurements and SCADA data. Appl. Energy 2019, 255, 113816. [Google Scholar] [CrossRef]
- Dai, J.; Yang, X.; Hu, W.; Wen, L.; Tan, Y. Effect investigation of yaw on wind turbine performance based on SCADA data. Energy 2018, 149, 684–696. [Google Scholar] [CrossRef]
- Le, C.; Li, Y.; Ding, H. Study on the coupled dynamic responses of a submerged floating wind turbine under different mooring conditions. Energies 2019, 12, 418. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Zhou, Q.; Tu, Y.; Wang, W.; Hua, X. Proposal of a Novel Semi-Submersible Floating Wind Turbine Platform Composed of Inclined Columns and Multi-Segmented Mooring Lines. Energies 2019, 12, 1809. [Google Scholar] [CrossRef] [Green Version]
- Luo, T.; Tian, D.; Wang, R.; Liao, C. Stochastic dynamic response analysis of a 10 MW tension leg platform floating horizontal axis wind turbine. Energies 2018, 11, 3341. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Z.; Rui, T.; Chen, M.; Wang, K. Power performance and dynamic responses of a combined fl oating vertical axis wind turbine and wave energy converter concept. Energy 2019, 171, 190–204. [Google Scholar] [CrossRef]
- Kokubun, K.; Ishida, S.; Nimura, T.; Chujo, T.; Yoshida, S.; Utsunomiya, T. Model Experiment Of A Spar Type Offshore Wind Turbine In Storm Condition. In Proceedings of the ASME 2012 31st International Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012; ASME: Rio de Janeiro, Brazil, 2012; pp. 569–575. [Google Scholar]
- Li, Y.; Zhu, Q.; Liu, L.; Tang, Y. Transient response of a SPAR-type floating offshore wind turbine with fractured mooring lines. Renew. Energy 2018, 122, 576–588. [Google Scholar] [CrossRef]
- Seebai, T.; Sundaravadivelu, R. Effect of Damaged Mooring Line on Response of Spar with Wind Turbine. J. Inst. Eng. (India) Ser. A 2012, 93, 9–14. [Google Scholar] [CrossRef]
- Bae, Y.H.; Kim, M.H.; Kim, H.C. Performance changes of a floating offshore wind turbine with broken mooring line. Renew. Energy 2017, 101, 364–375. [Google Scholar] [CrossRef]
- Ma, G.; Zhong, L.; Ma, Q.; Zhu, Y.; Wang, H. Dynamic Analysis of Mooring Break for a Semi-Submersible Floating Offshore Wind Turbine. In Proceedings of the Twenty-ninth (2019) International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019; The International Society of Offshore and Polar Engineers (ISOPE): Mountain View, CA, USA, 2019; pp. 356–362. [Google Scholar]
- Li, Y.; Le, C.; Ding, H.; Zhang, P. Dynamic Response for a Submerged Floating O ff shore Wind Turbine with Di ff erent Mooring Configurations. J. Mar. Sci. Eng. 2019, 7. [Google Scholar]
- Seven Mechanisms That Contribute to Mooring Line Failure. Available online: https://intermoor.com/technical-articles/six-mechanisms-that-can-contribute-to-mooring-line-failure/ (accessed on 7 April 2020).
- Wang, X.; Zeng, X.; Yang, X.; Li, J. Seismic response of offshore wind turbine with hybrid monopile foundation based on centrifuge modelling. Appl. Energy 2019, 235, 1335–1350. [Google Scholar] [CrossRef]
- Doubrawa, P.; Churchfield, M.J.; Godvik, M.; Sirnivas, S. Load response of a floating wind turbine to turbulent atmospheric flow. Appl. Energy 2019, 242, 1588–1599. [Google Scholar] [CrossRef]
- Gentils, T.; Wang, L.; Kolios, A. Integrated structural optimisation of offshore wind turbine support structures based on finite element analysis and genetic algorithm. Appl. Energy 2017, 199, 187–204. [Google Scholar] [CrossRef] [Green Version]
- Leble, V.; Barakos, G.N. A Coupled Floating Offshore Wind Turbine Analysis with High-fidelity Methods. Energy Procedia 2016, 94, 523–530. [Google Scholar] [CrossRef] [Green Version]
- Chehouri, A.; Younes, R.; Ilinca, A.; Perron, J. Review of performance optimization techniques applied to wind turbines. Appl. Energy 2015, 142, 361–388. [Google Scholar] [CrossRef]
- Jonkman, B.J.; Jonkman, J.M. FAST v8.16.00a-bjj User’s Guide; National Renewable Energy Laboratory: Golden, CO, USA, 2016.
- Glauert, H. Airplane Propellers. In Aerodynamic Theory; Springer: Berlin/Heidelberg, Germany, 1935. [Google Scholar]
- Moriarty, P.J.; Hansen, A.C. AeroDyn Theory Manual; National Renewable Energy Laboratory: Golden, CO, USA, 2005.
- Ingram, G. Wind Turbine Blade Analysis Using the Blade Element Momentum Method; Durham University: Durham, UK, 2011. [Google Scholar]
- WAMIT 6.2 User Manual. Available online: http://www.wamit.com/ (accessed on 7 April 2020).
- Morison, J.R.; Johnson, J.W.; Schaaf, S.A. The Force Exerted by Surface Waves on Piles. J. Pet. Technol. 1950. [Google Scholar] [CrossRef]
- Zandt, T. Van FAST User’s Guide. Acta Psychiatr. Scand. 2007, 123, 407–408. [Google Scholar]
- Kurian, V.J.; Yassir, M.A.; Harahap, I.S. Nonlinear coupled dynamic response of a semi-submersible platform. In Proceedings of the International Offshore and Polar Engineering Conference, Beijing, China, 20–25 June 2010; Volume 3, pp. 492–499. [Google Scholar]
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, MA, USA, 1993. [Google Scholar]
- Vu, M.T.; Van, M.; Bui, D.H.P.; Do, Q.T.; Huynh, T.T.; Lee, S.D.; Choi, H.S. Study on dynamic behavior of unmanned surface vehicle-linked unmanned underwater vehicle system for underwater exploration. Sensors (Switz.) 2020, 20, 1329. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- The Vu, M.; Choi, H.S.; Kang, J.; Ji, D.H.; Jeong, S.K. A study on hovering motion of the underwater vehicle with umbilical cable. Ocean Eng. 2017, 135, 137–157. [Google Scholar] [CrossRef]
- Low, Y.M.; Langley, R.S. A hybrid time/frequency domain approach for efficient coupled analysis of vessel/mooring/riser dynamics. Ocean Eng. 2008, 35, 433–446. [Google Scholar] [CrossRef]
- Goodman, T.R.; Breslin, J.P. Statics and Dynamics of Anchoring Cables in Waves. J. Hydronautics 1976, 10, 113–120. [Google Scholar] [CrossRef]
- Low, Y.M.; Langley, R.S. Time and frequency domain coupled analysis of deepwater floating production systems. Appl. Ocean Res. 2006, 28, 371–385. [Google Scholar] [CrossRef]
- Hall, M.; Goupee, A. Validation of a lumped-mass mooring line model with DeepCwind semisubmersible model test data. Ocean Eng. 2015, 104, 590–603. [Google Scholar] [CrossRef] [Green Version]
- Dewa, C.K. Afiahayati Suitable CNN Weight Initialization and Activation Function for Javanese Vowels Classification. Procedia Comput. Sci. 2018, 144, 124–132. [Google Scholar] [CrossRef]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H. Definition of the Semisubmersible Floating System for Phase II of OC4; National Renewable Energy Laboratory: Golden, CO, USA, 2014.
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory: Golden, CO, USA, 2009.
- Slot, R.M.M.; Svenningsen, L. Consistent direct-drive version of the NREL 5MW turbine. In Proceedings of the WindEurope, Hamburg, Germany, 25–28 September 2018. [Google Scholar]
- Li, Q.; Michailides, C.; Gao, Z.; Moan, T. A comparative study of different methods for predicting the long-term extreme structural responses of the combined wind and wave energy concept semisubmersible wind energy and flap-type wave energy converter. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 232, 85–96. [Google Scholar] [CrossRef]
- OrcaFlex. Available online: https://www.orcina.com/orcaflex/ (accessed on 7 April 2020).
- Azcon, J.; Vittori, F.; Savenije, F.; Kapogiannis, G.; Karvelas, X.; Manolas, D.; Voutsinas, S.; Amann, F.; Ricardo, F.-G.; Lemmer, F. Design Solutions for 10MW Floating Offshore Wind Turbines; INNWIND: Roskilde, Denmark, 2017. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Gearbox Wind Turbine | Direct Drive Wind Turbine | Scaling Factor |
|---|---|---|---|
| Proportional Gain | 0.006275604 | 0.608733588 | Gearbox Ratio |
| Integral Gain | 0.0008965149 | 0.0869619453 | Gearbox Ratio |
| Generator speed at the high-speed shaft end (Rad/s) | 122.9096 | 1.2671 | Gearbox Ratio |
| Load Case Number | Wind Speed (m/s) | HS (m) | TP (s) |
|---|---|---|---|
| 1 | 4 | 1.7 | 11.6 |
| 2 | 6 | 1.9 | 11.3 |
| 3 | 8 | 2.1 | 11.0 |
| 4 | 10 | 2.4 | 10.8 |
| 5 | 12 | 2.8 | 10.7 |
| 6 | 14 | 3.2 | 10.7 |
| 7 | 16 | 3.7 | 10.8 |
| 8 | 18 | 4.2 | 10.8 |
| 9 | 20 | 4.7 | 11.0 |
| 10 | 22 | 5.4 | 11.1 |
| 11 | 24 | 6.0 | 11.3 |
| Parameter | Description | |
|---|---|---|
| Blade | TipDxb1 | Blade 1 flapwise tip deflection |
| TipDyb1 | Blade 1 edgewise tip deflection | |
| Tower | TTDspFA | Tower-top fore-aft deflection |
| TTDspSS | Tower-top side-to-side deflection | |
| Platform | PtfmSurge | Platform Surge Motion |
| PtfmSway | Platform Sway Motion | |
| PtfmHeave | Platform Heave Motion | |
| Ptfmroll | Platform Roll Motion | |
| PtfmPitch | Platform Pitch Motion | |
| PtfmYaw | Platform Yaw Motion | |
| Model | Mean (kN) | Min (kN) | Max (kN) |
|---|---|---|---|
| Flexible | 1498.02 | 1140.00 | 2097.00 |
| Rigid | 1496.93 | 1140.00 | 2092.00 |
| Difference (%) | 0.72 | 0.00 | 2.38 |
| Parameter | Value |
|---|---|
| Rope/Wire Properties nominal diam | 0.2 m |
| Weight in air | 0.313 kN/m (0.032 te/m) |
| Displacement | 0.234 kN/m (0.024 te/m) |
| Weight in water | 0.079 kN/m (0.0081 te/m) |
| Diam/Wt ratio | 2.166 m/(kN/m) (21.245 m/(te/m)) |
| EA | 43.6E3 kN |
| Added mass | 1.0 |
| Line length | 245 m |
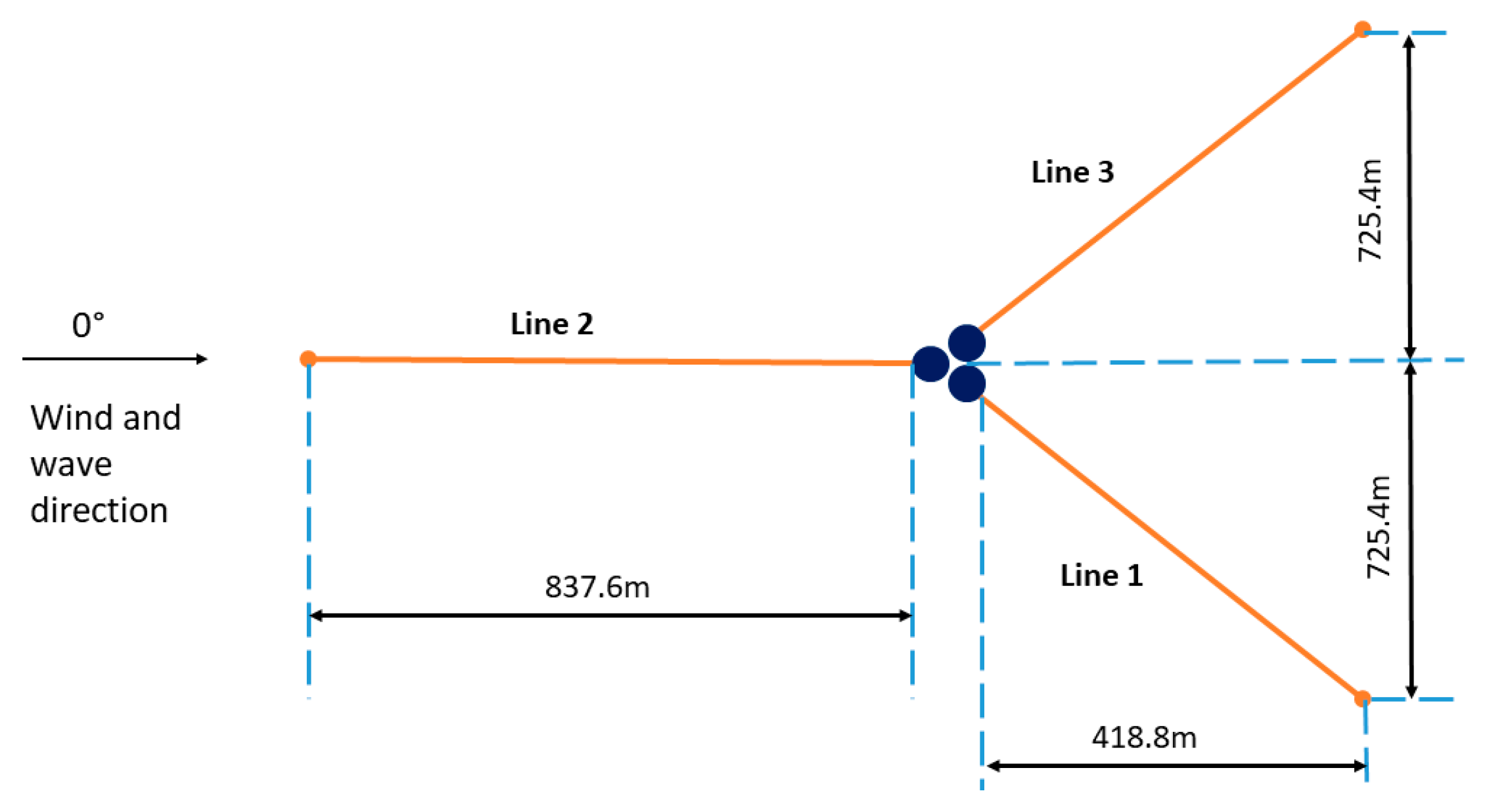
| Line No | Position | |||
|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | ||
| Line1 | Fairlead | −40.868 | 0 | −14 |
| Anchor | −200 | 0 | 0 | |
| Line2 | Fairlead | 20.434 | 35.3917 | −14 |
| Anchor | 100 | 173.2 | 0 | |
| Line3 | Fairlead | 20.434 | −35.3917 | −14 |
| Anchor | 100 | −173.2 | 0 | |
| Model | Mean (N) | Minimum (N) | Maximum (N) |
|---|---|---|---|
| flexible | 860,955.51173 | 313,500 | 1,313,000 |
| rigid | 863,705.90408 | 328,400 | 1,305,000 |
| Difference (%) | 0.3 | 4.8 | 0.6 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Z.; Liu, X. Assessment of Wind Turbine Aero-Hydro-Servo-Elastic Modelling on the Effects of Mooring Line Tension via Deep Learning. Energies 2020, 13, 2264. https://doi.org/10.3390/en13092264
Lin Z, Liu X. Assessment of Wind Turbine Aero-Hydro-Servo-Elastic Modelling on the Effects of Mooring Line Tension via Deep Learning. Energies. 2020; 13(9):2264. https://doi.org/10.3390/en13092264
Chicago/Turabian StyleLin, Zi, and Xiaolei Liu. 2020. "Assessment of Wind Turbine Aero-Hydro-Servo-Elastic Modelling on the Effects of Mooring Line Tension via Deep Learning" Energies 13, no. 9: 2264. https://doi.org/10.3390/en13092264