Integrated Transmission-and-Distribution System Modeling of Power Systems: State-of-the-Art and Future Research Directions


Abstract
:1. Introduction
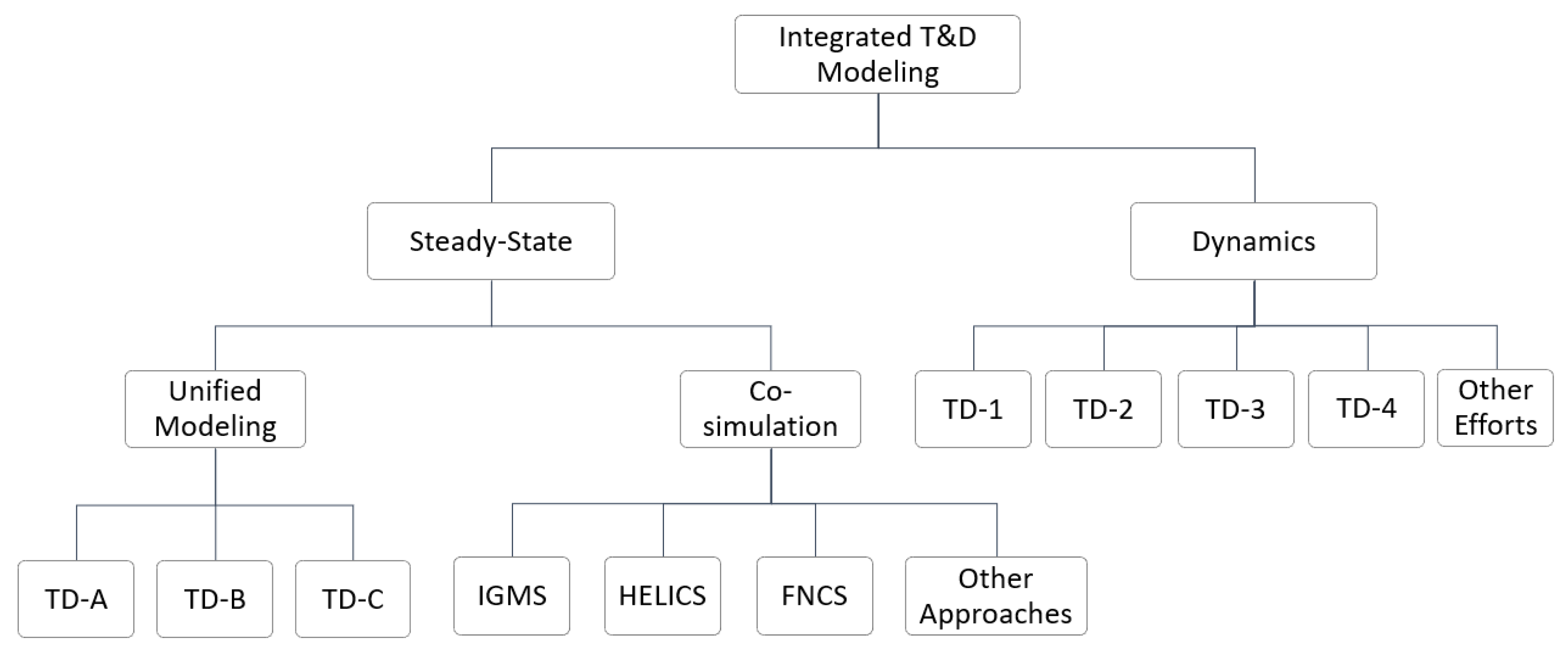
2. Steady-State Modeling of Power Systems Using Integrated T&D Models
2.1. Introduction
- Phase unbalance in transmission systems has been demonstrated for power systems with distributed energy resources (DERs) [2]. DERs can exacerbate phase unbalance in the distribution circuits to which they are connected. This unbalance gets reflected into the transmission system; hence, a balanced, three-phase operation cannot be assumed for the modern bulk power system.
- Steady-state voltage stability of transmission systems is a function of maximum load carrying ability of system buses [3], which in turn depends on the available generation resources, network topology, load patterns, and volt ampere reactive or Var support [4]. DERs connected to the distribution system impact these parameters, which leads to variability in voltage stability [5].
2.2. Unified T&D Model-Based Steady-State Modeling of Power Systems
2.2.1. TD-A Approach
2.2.2. TD-B Approach
2.2.3. TD-C Approach
2.3. Co-Simulation Approach for T&D Model-Based Steady State Modeling of Power Systems
2.3.1. Integrated Grid Modeling System
2.3.2. Hierarchical Engine for Large Scale Infrastructure Simulation
2.3.3. Framework for Network Co-Simulation
2.3.4. Loose and Tight Couplings in T&D Co-Simulation
2.3.5. Other Co-Simulation Approaches
2.4. Gaps and Future Research Directions
- Quantifying the value of performing steady-state analysis using integrated T&D models. Improved modeling accuracy is an obvious advantage of using integrated T&D models. However, as the above review revealed, researchers have adopted different approaches, each with its own advantages and limitations, and we are unaware of a thorough evaluation of these approaches to quantify the relative costs and benefits of each. Moreover, there is an inherent cost involved in shifting to new tools (e.g., because of personnel training and the development of new databases). This cost must be justified to stakeholders who might want to adopt this new modeling and simulation paradigm. Defining metrics to quantify the costs and benefits of integrated T&D modeling can help stakeholders make informed choices about the algorithms and integrated T&D modeling approaches they wish to adopt.
- Developing tools and techniques to analyze data generated by time series simulation of large integrated T&D models. Real-world, integrated T&D models can comprise millions of nodes and generate hundreds of gigabytes of data. Moreover, new patterns or phenomena might be buried in the data that power system planners and operators have not encountered before in separate transmission and distribution modeling. Manual data processing to sift through such large datasets and identifying the new patterns that these data might contain can be very difficult, if not impossible. This has not been the focus of research so far, and research that aims to develop techniques and tools to process the vast quantities of data generated in integrated T&D modeling can help to further the adoption of this new paradigm for power systems modeling.
- Developing T&D simulators for hardware-in-the-loop simulations. Hardware-in-the-loop simulators emulate characteristics of the real system and thus facilitate equipment integration. T&D hardware-in-the-loop simulators could provide useful insights into the behavior of the integrated system when dealing with disturbances, renewable generation variability, and faults. Developing such simulators is not trivial; however, because of the immense scale and details associated with integrated T&D system models.
- Lack of validation standards and models for testing/benchmarking novel T&D power flow algorithms. For benchmarking a novel power flow algorithm, IEEE standard models can be used; however, these models are for only transmission or distribution. There is no standard model that can be used to benchmark the performance of a novel T&D power flow algorithm. Recently, a public, synthetic integrated T&D dataset was developed, which can be accessed here [34].
- Most integrated T&D simulations require extensive computing resources. Thus, improving the efficiency, speed, and convergence time of these algorithms—whether by improving the algorithms themselves or by parallel processing and distributed computations—remains a gap that needs to be addressed.
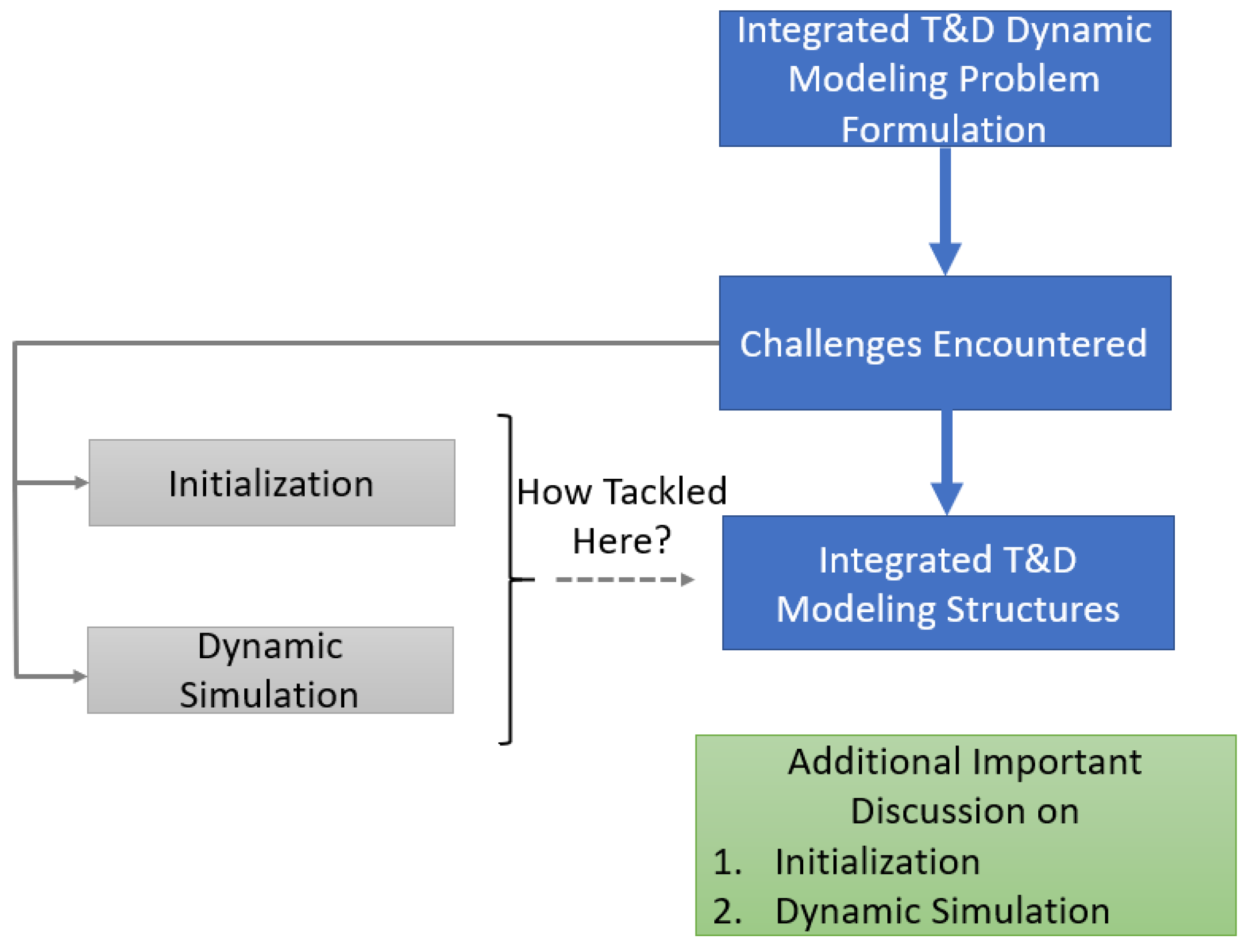
3. Dynamic Modeling Using Integrated T&D Models
3.1. Key Challenges of Integrated T&D Dynamic Simulations
- Although the average value of three-phase power is constant in steady-state, the instantaneous power oscillates at twice the fundamental frequency. In a balanced system, the instantaneous three-phase power is also constant.
- Even if the oscillations in the load power and the resulting torsional oscillations in the generators are ignored and the rotor angle is assumed to be constant, application of the Park’s transformation at steady-state frequency shows that the and axis voltages and currents have oscillatory components superimposed on DC values. Equation (4), copied from [36], shows how the oscillatory components appear in the and axis voltages under network unbalance.
3.2. T&D Dynamic Simulation Models Used in Literature
3.2.1. TD-1 Structure
3.2.2. TD-2 Structure
3.2.3. TD-3 Structure
3.2.4. TD-4 Structure
3.3. Initialization
3.3.1. TD-1 Initialization
3.3.2. TD-2 Initialization
3.3.3. TD-3 Initialization
3.3.4. TD-4 Initialization
3.3.5. Improving Initialization Accuracy
3.4. Dynamic Simulation
3.4.1. TD-1 Dynamic Simulation
3.4.2. TD-2 Dynamic Simulation
3.4.3. TD-3 Dynamic Simulation
3.4.4. TD-4 Dynamic Simulation
3.5. Other Integrated T&D Dynamics Modeling Efforts
3.5.1. Distribution-Informed Transmission Simulations
3.5.2. Integrated T&D Simulation for Grid Resilience Studies
3.6. Key Takeaways from Integrated T&D Dynamics Modeling
- DAE-based integrated T&D modeling with a focus on studying slow electromechanical transients has been the primary focus of research. Although a few researchers have attempted to use EMT programs [43,45], concerns about scalability and speed have been expressed regarding the use of integrated T&D modeling in the EMT domain [42,43].
- DAEs have been solved using the sequential approach, where the differential and algebraic equations are solved separately by exchanging data at the generator terminals at each iteration. Simple implementation, the ability to use existing and specialized transmission and distribution solvers, and parallelizing the solution of DAEs on multiple processors have been cited as some of the reasons to use the sequential approach [14,42,46].
- Several applications showing the advantages of simulating integrated T&D dynamics are presented. These include single-line-to-ground faults on the transmission side with single-pole tripping [42], studying the impact of solar PV transients on power system dynamics [40], and fault-induced delayed voltage recovery (FIDVR) studies [14,46]. The key objective of these studies has been to show the benefits that are obtained by using an integrated T&D model for dynamic simulations compared to using transmission-only models. These studies have primarily been performed on synthetic integrated T&D dynamic models. During this review we did not come across a dynamic study that was performed on a real utility’s integrated T&D system, except in ref. [42], where the integrated T&D model of small utility was used.
- Another important observation from the review is that the validation of the integrated T&D dynamic simulation approaches was done exclusively in software by comparing the results with those obtained from an EMT program. We could not find a reference where validation was performed based on field measurements of a real event.
- Except for [46], we did not find an attempt to provide theoretical underpinnings for the numerical stability, accuracy, and convergence properties of the proposed integrated T&D dynamic simulation algorithms.
- We also did not find any research work that performed a cost-benefit analysis of performing integrated T&D dynamic simulations. In other words, how does the benefit resulting from the increased accuracy of integrated T&D dynamic simulations compare to the computational burden of performing the integrated T&D dynamic simulations?
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Integrated System Models in Production

References
- John, J.S. DistribuTech Spotlight: Hawaii’s Interoperable Grid Communications and Next-Gen Grid Planning; Greentech Media: Boston, MA, USA, 2019. [Google Scholar]
- Bhatti, B.A.; Broadwater, R.; Delik, M. Integrated T D Modeling vs. Co-Simulation—Comparing Two Approaches to Study Smart Grid. In Proceedings of the 2019 IEEE Power Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Goh, H.H.; Tai, C.W.; Chua, Q.S.; Lee, S.W.; Kok, B.C.; Goh, K.C.; Teo, K.T.K. Dynamic Estimation of Power System Stability in Different Kalman Filter Implementations. In Proceedings of the 2014 IEEE NW Russia Young Researchers in Electrical and Electronic Engineering Conference, St. Petersburg, Russia, 14–15 November 2014; pp. 41–46. [Google Scholar]
- Alzahawi, T.; Sachdev, M.S.; Ramakrishna, G. A Special Protection Scheme for Voltage Stability Prevention. In Proceedings of the Canadian Conference on Electrical and Computer Engineering, Saskatoon, SK, Canada, 1–4 May 2005; pp. 545–548. [Google Scholar]
- Kenyon, R.W.; Bossart, M.; Marković, M.; Doubleday, K.; Matsuda-Dunn, R.; Mitova, S.; Julien, S.A.; Hale, E.T.; Hodge, B.-M. Stability and Control of Power Systems with High Penetrations of Inverter-Based Resources: An Accessible Review of Current Knowledge and Open Questions. Sol. Energy 2020. [Google Scholar] [CrossRef]
- Tbaileh, A.; Jain, H.; Broadwater, R.; Cordova, J.; Arghandeh, R.; Dilek, M. Graph Trace Analysis: An Object-oriented Power Flow, Verifications and Comparisons. Electr. Power Syst. Res. 2017, 147, 145–153. [Google Scholar] [CrossRef]
- Bhatti, B.A.; Broadwater, R.; Delik, M.; Tbaileh, A. An Index for Determination and Manipulation of Steady State Voltage Stability of Transmission and Distribution Infrastructures. In Proceedings of the IEEE/PES Transmission and Distribution Conference and Exposition (T&D) 2020; IEEE: Chicago, IL, USA, 2020; pp. 1–5. [Google Scholar]
- Bhatti, B.A.; Broadwater, R.; Delik, M. A Control Scheme for Manipulation of Steady State Voltage Stability of Integrated Transmission and Distribution Networks. In Proceedings of the IEEE Power & Energy Society General Meeting (PESGM) 2020; IEEE: Montreal, QC, Canada, 2020; pp. 1–5. [Google Scholar]
- Bhatti, B.A.; Broadwater, R.; Dilek, M. Analyzing Impact of Distributed PV Generation on Integrated Transmission & Distribution System Voltage Stability—A Graph Trace Analysis Based Approach. Energies 2020, 13, 4526. [Google Scholar] [CrossRef]
- Tbaileh, A.; Bhatti, B.A.; Broadwater, R.; Dilek, M.; Beattie, C. Robust Matrix Free Power Flow Algorithm for Solving T&D Systems. In Proceedings of the 2019 IEEE Power Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Sarstedt, M.; Garske, S.; Blaufuß, C.; Hofmann, L. Modelling of Integrated Transmission and Distribution Grids Based on Synthetic Distribution Grid Models. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Sun, H.; Guo, Q.; Zhang, B.; Guo, Y.; Li, Z.; Wang, J. Master–Slave-Splitting Based Distributed Global Power Flow Method for Integrated Transmission and Distribution Analysis. IEEE Trans. Smart Grid 2015, 6, 1484–1492. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Sun, H.; Guo, Q. Transmission Contingency Analysis Based on Integrated Transmission and Distribution Power Flow in Smart Grid. IEEE Trans. Power Syst. 2015, 30, 3356–3367. [Google Scholar] [CrossRef]
- Huang, Q.; Vittal, V. Integrated Transmission and Distribution System Power Flow and Dynamic Simulation Using Mixed Three-Sequence/Three-Phase Modeling. IEEE Trans. Power Syst. 2017, 32, 3704–3714. [Google Scholar] [CrossRef]
- Pandey, A.; Pileggi, L. Steady-State Simulation for Combined Transmission and Distribution Systems. IEEE Trans. Smart Grid 2020, 11, 1124–1135. [Google Scholar] [CrossRef]
- Pandey, A.; Jereminov, M.; Wagner, M.R.; Bromberg, D.M.; Hug, G.; Pileggi, L. Robust Power Flow and Three-Phase Power Flow Analyses. IEEE Trans. Power Syst. 2019, 34, 616–626. [Google Scholar] [CrossRef] [Green Version]
- Tripathy, S.C.; Prasad, G.D.; Malik, O.P.; Hope, G.S. Load-Flow Solutions for Ill-Conditioned Power Systems by a Newton-Like Method. IEEE Trans. Power Appar. Syst. 1982, PAS-101, 3648–3657. [Google Scholar] [CrossRef]
- Iwamoto, S.; Tamura, Y. A Load Flow Calculation Method for Ill-Conditioned Power Systems. IEEE Trans. Power Appar. Syst. 1981, PAS-100, 1736–1743. [Google Scholar] [CrossRef]
- Palmintier, B.; Hale, E.; Hansen, T.M.; Jones, W.; Biagioni, D.; Baker, K.; Wu, H.; Giraldez, J.; Sorensen, H.; Lunacek, M.; et al. Final Technical Report: Integrated Distribution-Transmission Analysis for Very High Penetration Solar PV; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2016. [Google Scholar]
- Zimmerman, R.D.; Murillo-Sánchez, C.E.; Thomas, R.J. MATPOWER: Steady-State Operations, Planning, and Analysis Tools for Power Systems Research and Education. IEEE Trans. Power Syst. 2011, 26, 12–19. [Google Scholar] [CrossRef] [Green Version]
- Chassin, D.P.; Fuller, J.C.; Djilali, N. GridLAB-D: An Agent-Based Simulation Framework for Smart Grids. Available online: https://www.hindawi.com/journals/jam/2014/492320/ (accessed on 18 August 2020).
- Jain, H.; Palmintier, B.; Krad, I.; Krishnamurthy, D. Studying the Impact of Distributed Solar PV on Power Systems Using Integrated Transmission and Distribution Models. In Proceedings of the 2018 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Denver, CO, USA, 16–19 April 2018; pp. 1–5. [Google Scholar]
- Jain, H.; Palmintier, B.; Krishnamurthy, D.; Krad, I.; Hale, E. Evaluating the Impact of Price-Responsive Load on Power Systems Using Integrated T&D Simulation. In Proceedings of the 2019 IEEE Power Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 17–20 February 2019; pp. 1–5. [Google Scholar]
- Transactive Controls—GridLAB-D Wiki. Available online: http://gridlab-d.shoutwiki.com/wiki/Transactive_controls (accessed on 26 August 2020).
- Palmintier, B.S. HELICS for Integrated Transmission, Distribution, Communication, & Control (TDC+C) Modeling; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2019. [Google Scholar]
- Top, P.; Mast, R.; Smith, S.; Fuller, J.; Fisher, A.; Daily, J.; Palmentier, B.; Krishamurthy, D.; Jain, H.; Elgindy, T. Hiearchical Engine for Large Scale Infrastructure Simulation; Lawrence Livermore National Lab. (LLNL): Livermore, CA, USA, 2017. [Google Scholar]
- Widergren, S.E.; Hammerstrom, D.J.; Huang, Q.; Kalsi, K.; Lian, J.; Makhmalbaf, A.; McDermott, T.E.; Sivaraman, D.; Tang, Y.; Veeramany, A.; et al. Transactive Systems Simulation and Valuation Platform Trial Analysis; Pacific Northwest National Lab. (PNNL): Richland, WA, USA, 2017. [Google Scholar]
- Ciraci, S.; Daily, J.; Fuller, J.; Fisher, A.; Marinovici, L.; Agarwal, K. FNCS: A Framework for Power System and Communication Networks Co-Simulation. In Proceedings of the Symposium on Theory of Modeling & Simulatio—DEVS Integrative; Society for Computer Simulation International: San Diego, CA, USA, 2014; pp. 1–8. [Google Scholar]
- Crawley, D.B.; Lawrie, L.K.; Pedersen, C.O.; Winkelmann, F.C. EnergyPlus: Energy Simulation Program. Ashrae J. 2000, 42, 49–56. [Google Scholar]
- Krishnamoorthy, G.; Dubey, A. A Framework to Analyze Interactions between Transmission and Distribution Systems. In Proceedings of the 2018 IEEE Power Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Sadnan, R.; Krishnamoorthy, G.; Dubey, A. Transmission and Distribution (T&D) Quasi-Static Co-Simulation: Analysis and Comparison of T D Coupling Strength. IEEE Access 2020, 8, 124007–124019. [Google Scholar] [CrossRef]
- Dubey, A. Framework to Analyze Interactions between Transmission and Distribution (T&D) Systems with High Distributed Energy Resource (DER) Penetrations; PSERC: Chandigarh, India, 2018. [Google Scholar]
- Schweitzer, E.; Hansen, J.; Fuller, J. Transmission and Distribution Co-Simulation with Possible Distribution Loops. In Proceedings of the 2018 IEEE Power Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Texas A&M Syn_Austin_TDGrid. Available online: https://electricgrids.engr.tamu.edu/ (accessed on 10 November 2020).
- Sauer, P.W.; Pai, M.A. Power System Dynamics and Stability, 1st ed.; Stipes Publishing Co.: Champaign, IL, USA, 2007; ISBN 978-1-58874-673-3. [Google Scholar]
- Jain, H. Dynamic Simulation of Power Systems using Three Phase Integrated Transmission and Distribution System Models: Case Study Comparisons with Traditional Analysis Methods. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, January 2017. [Google Scholar]
- Dommel, H.W. EMTP Theory Book; Microtran Power System Analysis Corporation: Vancouver, BC, Canada, 1996. [Google Scholar]
- Vanço, W.E.; Silva, F.B.; Monteiro, J.R.B.A. A Study of the Impacts Caused by Unbalanced Voltage (2%) in Isolated Synchronous Generators. IEEE Access 2019, 7, 72956–72963. Available online: https://ieeexplore.ieee.org/document/8725501 (accessed on 19 August 2020). [CrossRef]
- Roussel, M.R. Nonautonomous Systems. 2005. Available online: http://people.uleth.ca/~roussel/nld/nonauton.pdf (accessed on 22 December 2020).
- Jain, H.; Broadwater, R.P.; Dilek, M.; Bank, J. Studying the Impact of Solar PV on Power System Dynamics Using Integrated Transmission and Distribution Network Models. J. Energy Eng. 2018, 144. [Google Scholar] [CrossRef]
- Jain, H.; Parchure, A.; Broadwater, R.P.; Dilek, M.; Woyak, J. Three Phase Dynamics Analyzer: A New Program for Dynamic Simulation Using Three Phase Models of Power Systems. In Proceedings of the 2015 IEEE IAS Joint Industrial and Commercial Power Systems/Petroleum and Chemical Industry Conference (ICPSPCIC), Hyderabad, India, 19–21 November 2015; pp. 26–31. [Google Scholar]
- Jain, H.; Parchure, A.; Broadwater, R.P.; Dilek, M.; Woyak, J. Three-Phase Dynamic Simulation of Power Systems Using Combined Transmission and Distribution System Models. IEEE Trans. Power Syst. 2016, 31, 4517–4524. [Google Scholar] [CrossRef] [Green Version]
- Kang, N.; Singh, R.; Reilly, J.T.; Segal, N. Impact of Distributed Energy Resources on the Bulk Electric System—Combined Modeling of Transmission and Distribution Systems and Benchmark Case Studies; Argonne National Laboratory: Lemont, IL, USA, 2017; p. 74. [Google Scholar]
- Huang, Q.; Huang, R.; Fan, R.; Fuller, J.; Hardy, T.; Huang, Z.; Vittal, V. A Comparative Study of Interface Techniques for Transmission and Distribution Dynamic Co-Simulation. In Proceedings of the 2018 IEEE Power Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Wang, H.; Song, Y.; Huang, S.; Chen, Y.; Jiao, D.; Qian, Y. Hybrid Transient Simulation Platform for Interconnected Transmission and Distribution System Based on Powerfactory and PSASP. J. Eng. 2017, 2017, 2053–2056. [Google Scholar] [CrossRef]
- Venkatraman, R.; Khaitan, S.K.; Ajjarapu, V. Dynamic Co-Simulation Methods for Combined Transmission-Distribution System with Integration Time Step Impact on Convergence. IEEE Trans. Power Syst. 2019, 34, 1171–1181. [Google Scholar] [CrossRef]
- Aristidou, P.; Van Cutsem, T. Dynamic Simulations of Combined Transmission and Distribution Systems Using Decomposition and Localization. In Proceedings of the 2013 IEEE Grenoble Conference, Grenoble, France, 16–20 June 2013; pp. 1–6. [Google Scholar]
- DEW/ISM|EDD—Electrical Distribution Design. Available online: https://www.edd-us.com/dew-ism/ (accessed on 28 August 2020).
- Li, F.; Broadwater, R.P. Distributed Algorithms with Theoretic Scalability Analysis of Radial and Looped Load Flows for Power Distribution Systems. Electr. Power Syst. Res. 2003, 65, 169–177. [Google Scholar] [CrossRef]
- Dilek, M.; de Leon, F.; Broadwater, R.; Lee, S. A Robust Multiphase Power Flow for General Distribution Networks. IEEE Trans. Power Syst. 2010, 25, 760–768. [Google Scholar] [CrossRef]
- Marti, J.R.; Linares, L.R.; Hollman, J.A.; Moreira, F.A. OVNI-Integrated Software/Hardware Solution for Real-Time Simulation of Large Power Systems. In Proceedings of the 14th Power Systems Computation Conference, PSCC02, Sevilla, Spain, 24–28 June 2002. [Google Scholar]
- MATLAB—MathWorks. Available online: https://www.mathworks.com/products/matlab.html (accessed on 28 August 2020).
- Armstrong, M.; Marti, J.R.; Linares, L.R.; Kundur, P. Multilevel MATE for Efficient Simultaneous Solution of Control Systems and Nonlinearities in the OVNI Simulator. IEEE Trans. Power Syst. 2006, 21, 1250–1259. [Google Scholar] [CrossRef]
- Zhang, X.-P. Fast Three Phase Load Flow Methods. IEEE Trans. Power Syst. 1996, 11, 1547–1554. [Google Scholar] [CrossRef]
- Spitsa, V.; Salcedo, R.; Ran, X.; Martinez, J.F.; Uosef, R.E.; de Leon, F.; Czarkowski, D.; Zabar, Z. Three–Phase Time–Domain Simulation of Very Large Distribution Networks. IEEE Trans. Power Deliv. 2012, 27, 677–687. [Google Scholar] [CrossRef]
- Elizondo, M.A.; Tuffner, F.K.; Schneider, K.P. Three-Phase Unbalanced Transient Dynamics and Powerflow for Modeling Distribution Systems with Synchronous Machines. IEEE Trans. Power Syst. 2016, 31, 105–115. [Google Scholar] [CrossRef]
- PowerFactory—DIgSILENT. Available online: https://www.digsilent.de/en/powerfactory.html (accessed on 28 August 2020).
- Brandwajn, V.; Meyer, W.S.; Dommel, H.W. Synchronous Machine Initialization for Unbalanced Network Conditions Within an Electromagnetic Transients Program. In Proceedings of the IEEE Conference Proceedings Power Industry Computer Applications Conference, PICA-79, Cleveland, OH, USA, 15–19 May 1979; pp. 38–41. [Google Scholar]
- Salim, R.H.; Ramos, R.A. Analyzing the Effect of the Type of Terminal Voltage Feedback on the Small Signal Dynamic Performance of Synchronous Generators. In Proceedings of the 2010 IREP Symposium Bulk Power System Dynamics and Control—VIII (IREP), Rio de Janeiro, Brazil, 1–6 August 2010; pp. 1–7. [Google Scholar]
- Kenyon, R.W.; Mather, B.A. Simulating Distributed Energy Resource Responses to Transmission System-Level Faults Considering IEEE 1547 Performance Categories on Three Major WECC Transmission Paths; National Renewable Energy Laboratory: Golden, CO, USA, 2020; p. 1603268. [Google Scholar]
- OpenD. Available online: https://www.epri.com/pages/sa/opendss (accessed on 28 August 2020).
- IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces; IEEE Std 1547-2018 (Revision of IEEE Std 1547-2003); IEEE: New York, NY, USA, 2018; pp. 1–138. [CrossRef]
- PSLF|Transmission Planning Software|GE Energy Consulting. Available online: https://www.geenergyconsulting.com/practice-area/software-products/pslf (accessed on 28 August 2020).
- Kenyon, R.W.; Mather, B.; Hodge, B.-M. Coupled Transmission and Distribution Simulations to Assess Distributed Generation Response to Power System Faults. Electr. Power Syst. Res. 2020, 189, 106746. [Google Scholar] [CrossRef]
- Russell, K.J.; Broadwater, R.P. Automated Load Priority Analysis for Interdependent, Critical Infrastructure System Reconfiguration. Nav. Eng. J. 2017, 129, 99–110. [Google Scholar]
- U.S. DOE: Office of Energy Efficiency and Renewable Energy. Faster-Than-Real-Time Simulation with Demonstration for Resilient DER Integration; USDOE: Washington, DC, USA, 2019.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| T&D Modeling Structure | References Where Used |
|---|---|
| TD-A | [6,7,8,9,10,11] |
| TD-B | [12,13,14] |
| TD-C | [15,16] |
| References | T&D Structure Used | Reference Software | Largest Network Tested | Synthetic */Utility Model | Time in Seconds to Solve One Power Flow (for the Largest Network) | Discussion on Numerical Stability/Convergence of Algorithm? |
|---|---|---|---|---|---|---|
| [6,7,8,9,10] | TD-A | Distributed Engineering Workstation (DEW) | Network model with 784,000 nodes and 8 voltage levels | Utility | 21 | Yes |
| [11] | TD-A | Custom Tool | System with 1076 buses | Synthetic | 120 | No discussion found |
| [12,13] | TD-B | Custom Tool | System with 118 transmission buses and 6 feeders with 44 nodes | Synthetic | Not mentioned. It only discusses iterations | Yes |
| [20,21] | TD-C | Custom Tool | Eastern Interconnection system with 75,000 nodes | Utility | 0.4 | Yes |
| [19,22,23] | Co-simulation | GridLAB-D and MATPOWER (IGMS) | 1.3 million buses | Utility | 46,388 | Yes |
| [25] | Co-simulation | HELICS | Entire island of Oahu, HI with >1 million nodes | Utility | Not mentioned | Yes |
| [26] | Co-simulation | FNCS, Energyplus, MATPOWER | 9 bus transmission model with multiple distribution feeders | Synthetic | Not mentioned | Yes |
| [30,31,32] | Co-simulation | MATLAB | IEEE 39 bus transmission and EPRI Ckt-24 distribution feeder | Synthetic | 7–11 | Yes |
| T&D Modeling Structures | Pros | Cons | References Where Used |
|---|---|---|---|
| TD-1 | Most accurate dynamic modeling | Re-use of existing dynamic simulation software is difficult | [36,40,41,42,43] |
| TD-2 | Domain-specific existing dynamic simulation software can be used | Modeling of un-transposed transmission lines is difficult | [14,44] |
| TD-3 | Existing balanced transmission system dynamic models can be used | Transmission system unbalance cannot be modeled, resulting in inconsistent interface between transmission and distribution systems | [45,46] |
| TD-4 | Existing balanced transmission system dynamic models can be used | Only applicable where distribution systems can be assumed to be balanced | [47] |
| References | T&D Structure Used | Reference Software | Largest Network Model | Disturbance | Validation Metric(s) | Min/Max Validation Error |
|---|---|---|---|---|---|---|
| [36,40,41,42] | TD-1 | Alternative Transients Program | IEEE-39 bus transmission system (all three phases modeled) [36] | Phase A load at a bus increased by 99 times for 0.2 s | Root mean square error for rotor speed deviation | 0.0003/0.0015 Hz |
| Root mean square error of a bus voltage | 0.13/0.47% | |||||
| Correlation coefficients for rotor speed deviation | 95/99% | |||||
| Correlation coefficients for a bus voltage | 92/100% | |||||
| [43] | TD-1 | Not Mentioned | Not Mentioned | Not Mentioned | Not Mentioned | Not Mentioned |
| [14,44] | TD-2 | PSCAD | IEEE-39 bus transmission system plus 6, 8 node distribution feeders | Single-line-to-ground (SLG) fault on phase A of a bus applied for 0.07 s | Maximum difference in one generator’s rotor speed | 0.005 p.u. (60 Hz base) |
| [45] | TD-3 | PowerFactory | IEEE-9 bus transmission system plus 1, IEEE-13 node distribution feeder | Not mentioned | No quantifiable metric, only visual comparison of phase A voltage of a node | Voltage profiles almost indistinguishable |
| [46] | TD-3 | PSAT | IEEE-9 bus transmission system plus 3, 1-node aggregated distribution feeders (integrated T&D network model is balanced) | Induction motor is brought online | No quantifiable metric, only visual comparison of bus’s voltage | Close match in voltage profiles |
| [60] | Distribution-Informed Transmission Simulations | Not Mentioned | Not Mentioned | Not Mentioned | Not Mentioned | Not Mentioned |
| [47] | TD-4 | Not Mentioned | Not Mentioned | Not Mentioned | Not Mentioned | Not Mentioned |
| References | T&D Structure Used | Largest Network Tested | Synthetic/Utility Model | Event(s) | Time in Seconds to Simulate 1 s | Discussion on Numerical Convergence of Algorithm? |
|---|---|---|---|---|---|---|
| [36,40,41,42] | TD-1 | >25,000 elements (multi-phase model) [42] | Utility | Study of voltage sags under SLG faults | 960 (0.004167 s time step) | Not Mentioned |
| [43] | TD-1 | 6 transmission nodes plus 4, IEEE-34 node distribution feeders | Synthetic | Six studies were performed to understand the impact of DERs on frequency regulation, voltage stability and dynamic stability | Not Mentioned | Not Mentioned |
| [14,44] | TD-2 | IEEE-39 bus transmission system plus 6, 8 node distribution feeders | Synthetic | Study Fault Induced Delayed Voltage Recovery (FIDVR) event caused by (i) SLG fault, and (ii) three-phase-to-ground fault but with load and composition unbalance | 142 (0.005 s time step) (These data are for the validation tests because similar data for the applications were not provided) | Not Mentioned |
| [45] | TD-3 | >30,000 transmission buses; number of distribution feeders or number of nodes in each feeder are not mentioned | Unclear (the term “real-world” power system is used but it is unclear if the integrated T&D model is real-world or just the separate transmission and distribution models) | SLG fault | Not Mentioned | Not Mentioned |
| [46] | TD-3 | IEEE-39 bus transmission system plus 170, IEEE-34 node distribution feeders | Synthetic | Three-phase-to-ground faut to study FIDVR event | Not Mentioned | Yes, detailed discussion on numerical convergence of parallel and series co-simulation approaches is provided |
| [60] | Distribution-Informed Transmission Simulations | >21,000 transmission buses plus 123 SCE distribution feeders | Synthetic (transmission and distribution models were individually real utility models) | Three-phase-to-ground faults to study the impact of different IEEE 1547 voltage ride through settings implemented in DERs | Not Mentioned | Not Mentioned |
| [47] | TD-4 | 53 transmission buses plus 146, 100 bus distribution networks (integrated T&D network model is balanced) | Synthetic | Generator tripping and three-phase-to-ground fault events | 0.85 to 10.08 s (see Table 1 of [47]); (0.02 s time step) | Not Mentioned |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jain, H.; Bhatti, B.A.; Wu, T.; Mather, B.; Broadwater, R. Integrated Transmission-and-Distribution System Modeling of Power Systems: State-of-the-Art and Future Research Directions. Energies 2021, 14, 12. https://doi.org/10.3390/en14010012
Jain H, Bhatti BA, Wu T, Mather B, Broadwater R. Integrated Transmission-and-Distribution System Modeling of Power Systems: State-of-the-Art and Future Research Directions. Energies. 2021; 14(1):12. https://doi.org/10.3390/en14010012
Chicago/Turabian StyleJain, Himanshu, Bilal Ahmad Bhatti, Tianying Wu, Barry Mather, and Robert Broadwater. 2021. "Integrated Transmission-and-Distribution System Modeling of Power Systems: State-of-the-Art and Future Research Directions" Energies 14, no. 1: 12. https://doi.org/10.3390/en14010012