
Real-Time Sensing Action of the Electromagnetic Vibration-Based Energy Harvester for a Magnetorheological Damper Control


Abstract
:1. Introduction
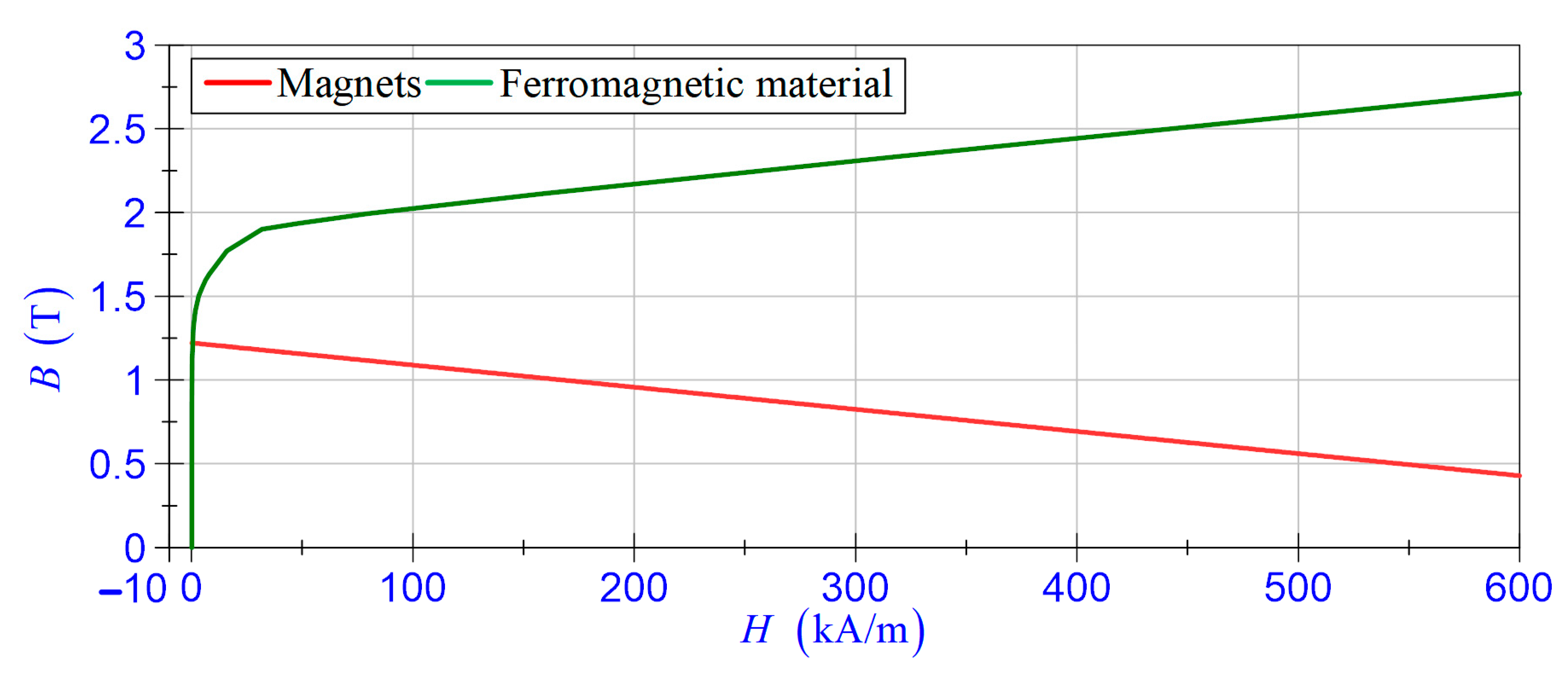
2. Electromagnetic Vibration-Based Energy Harvester
3. Magnetorheological Damper
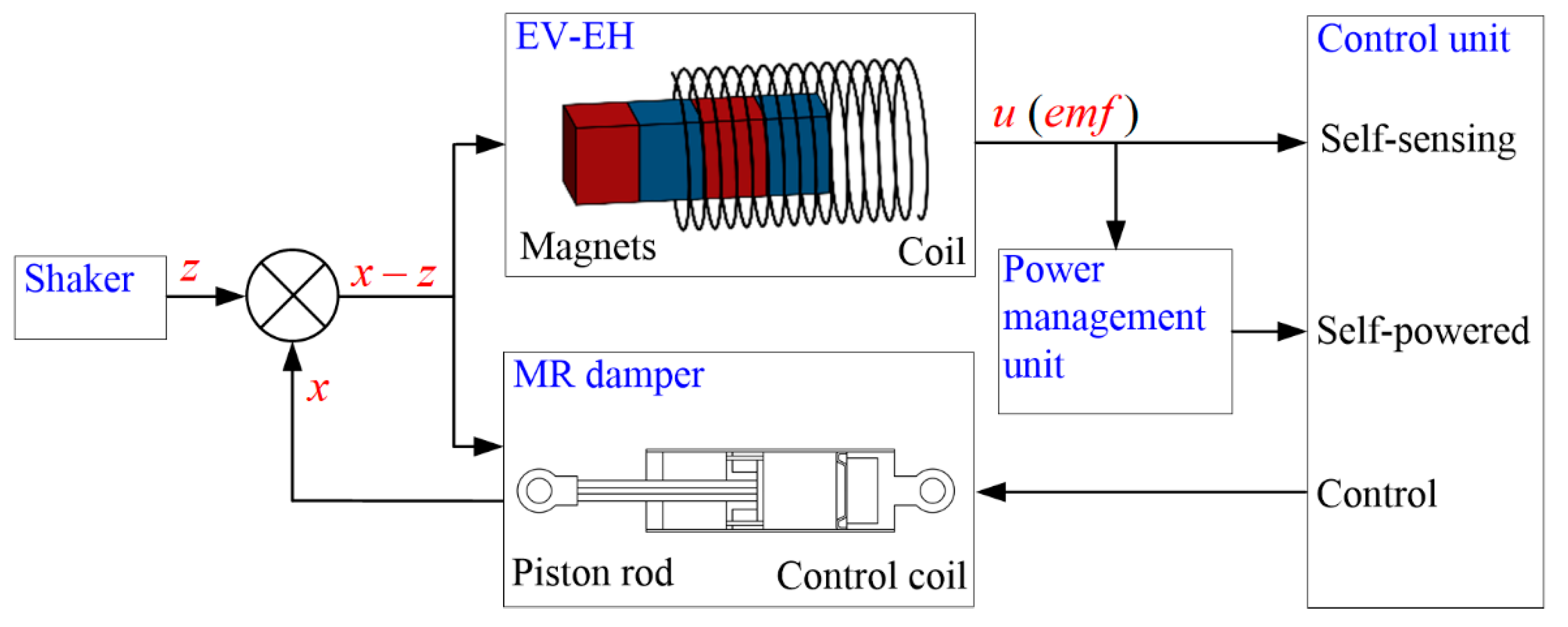
4. Experimental Tests and Analysis of Self-Sensing and Self-Powered Capability
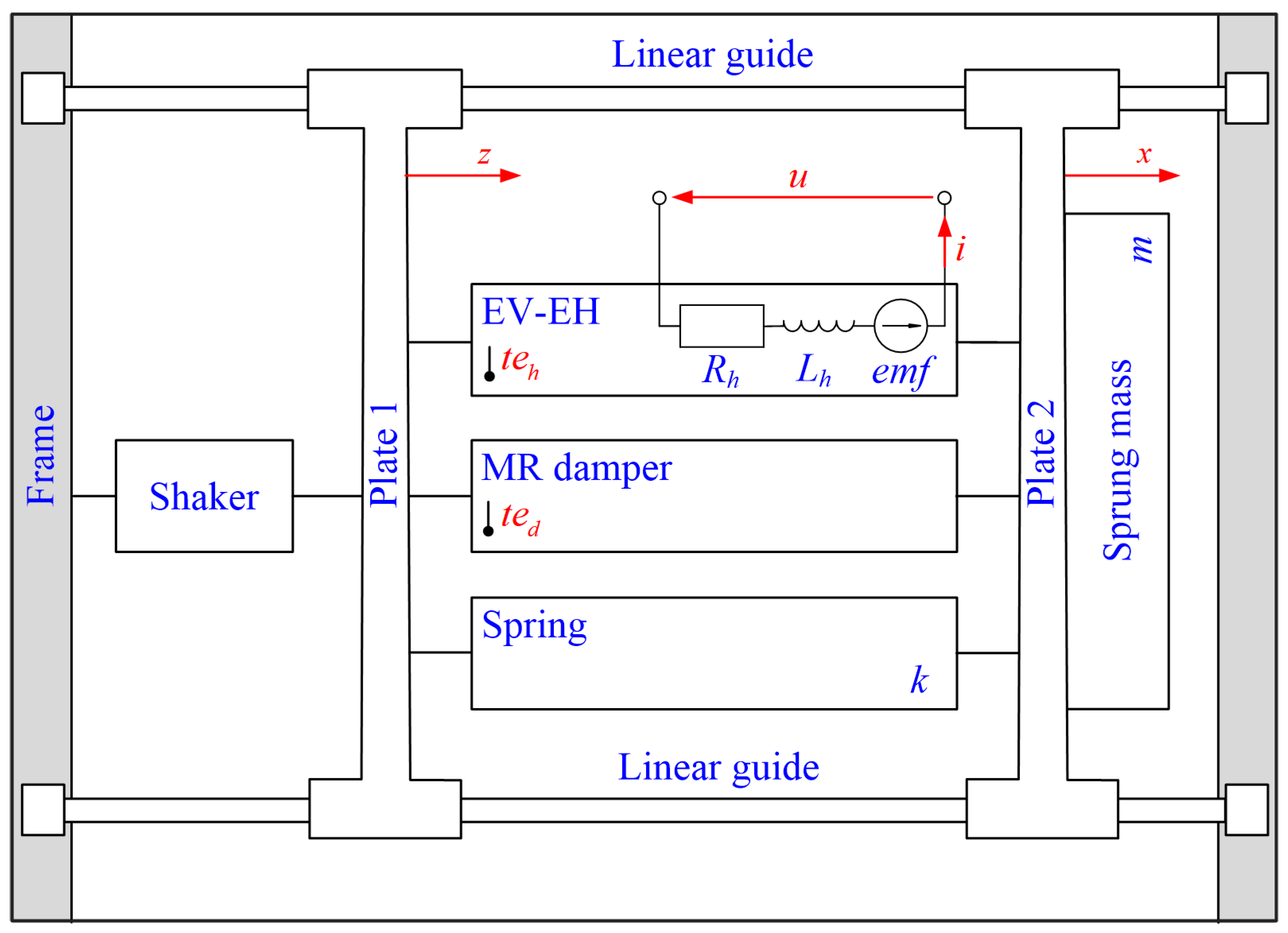
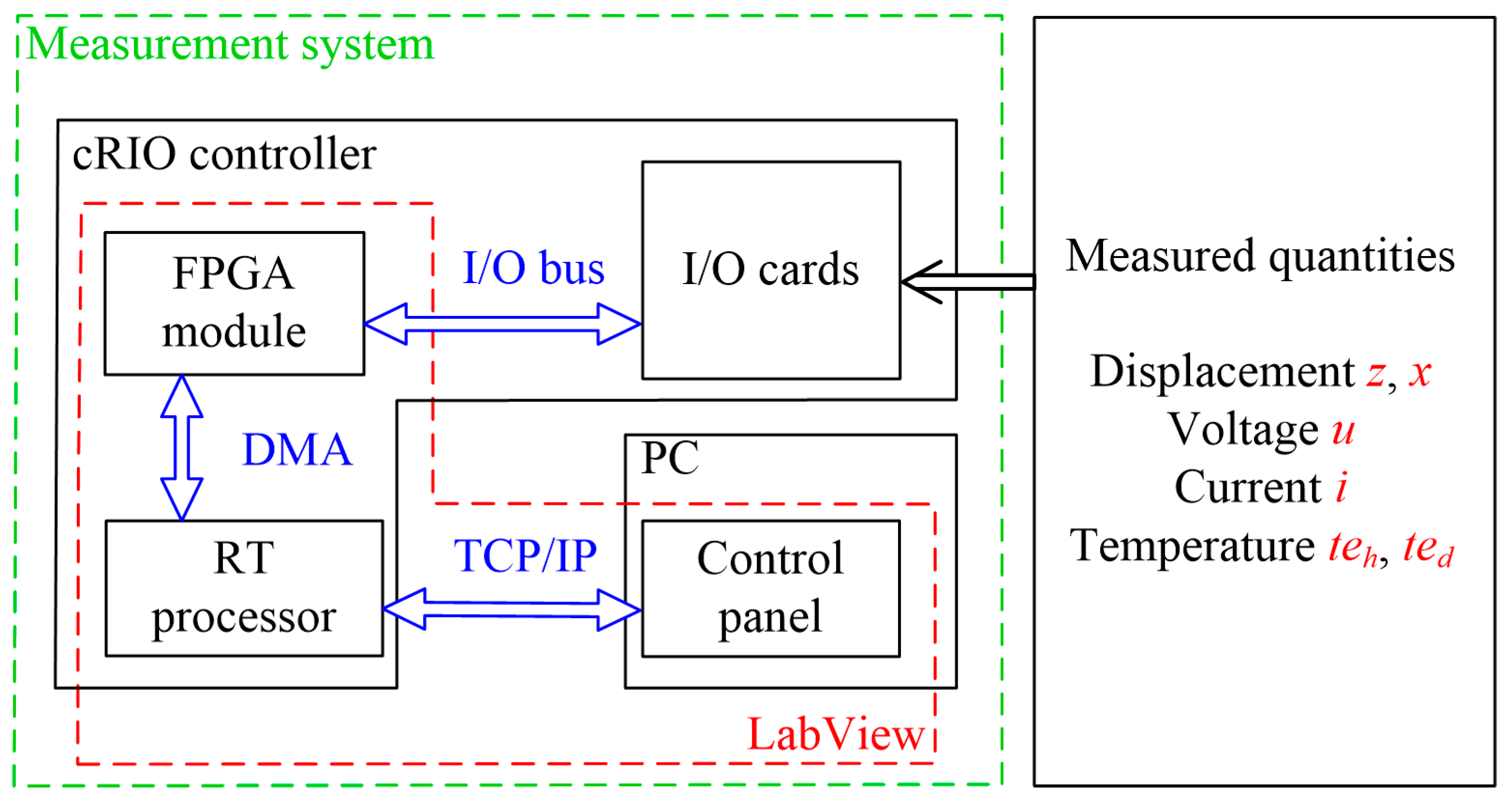
4.1. Test Rig and Measurement System
4.2. Data Acquisition
- Case —idle run (the EV-EH coil was disconnected);
- Cases , , , —under load : , , in , in (the maximum value of was nearly equal to , the minimum value was chosen so that voltage generated by the EV-EH did not exceed the measured range of the NI 9215 card);
- Case —under load (, and (, ;
- Cases , —under load in for and for .
4.3. Data Analysis
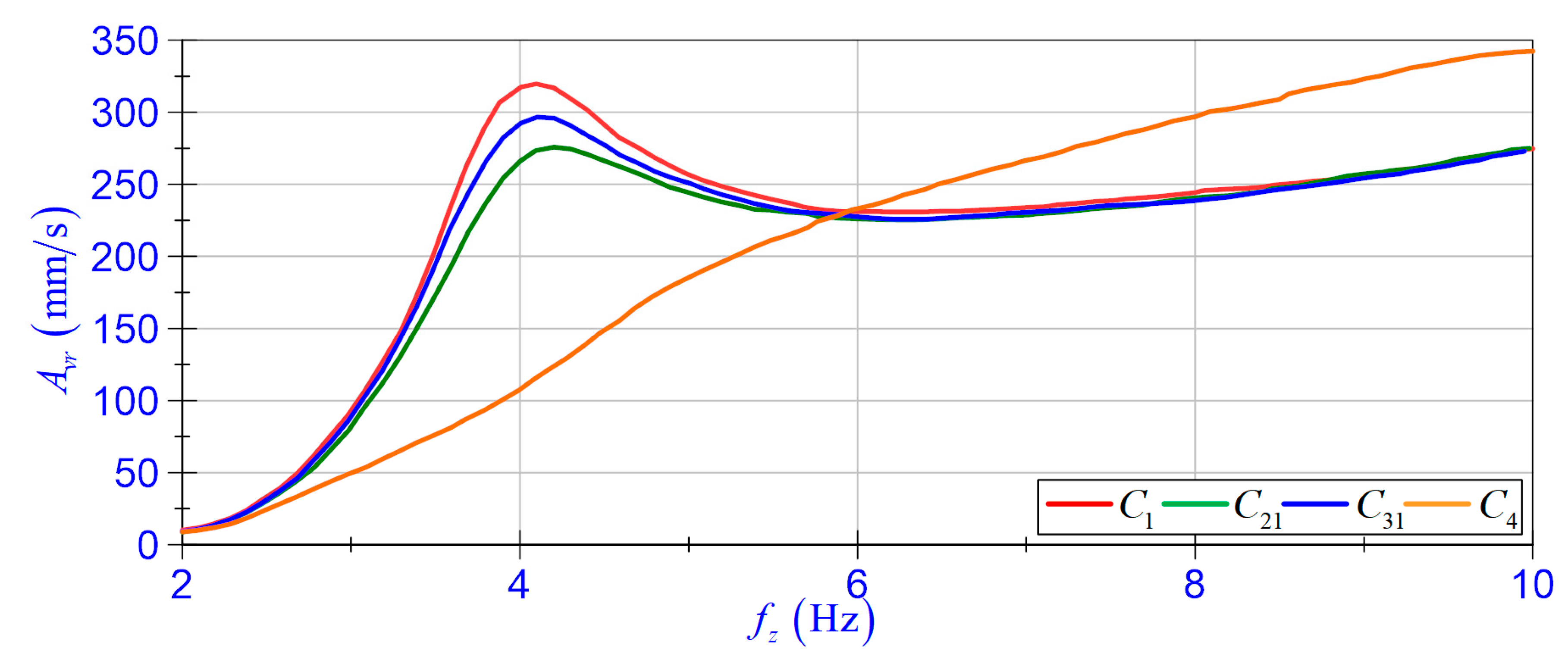
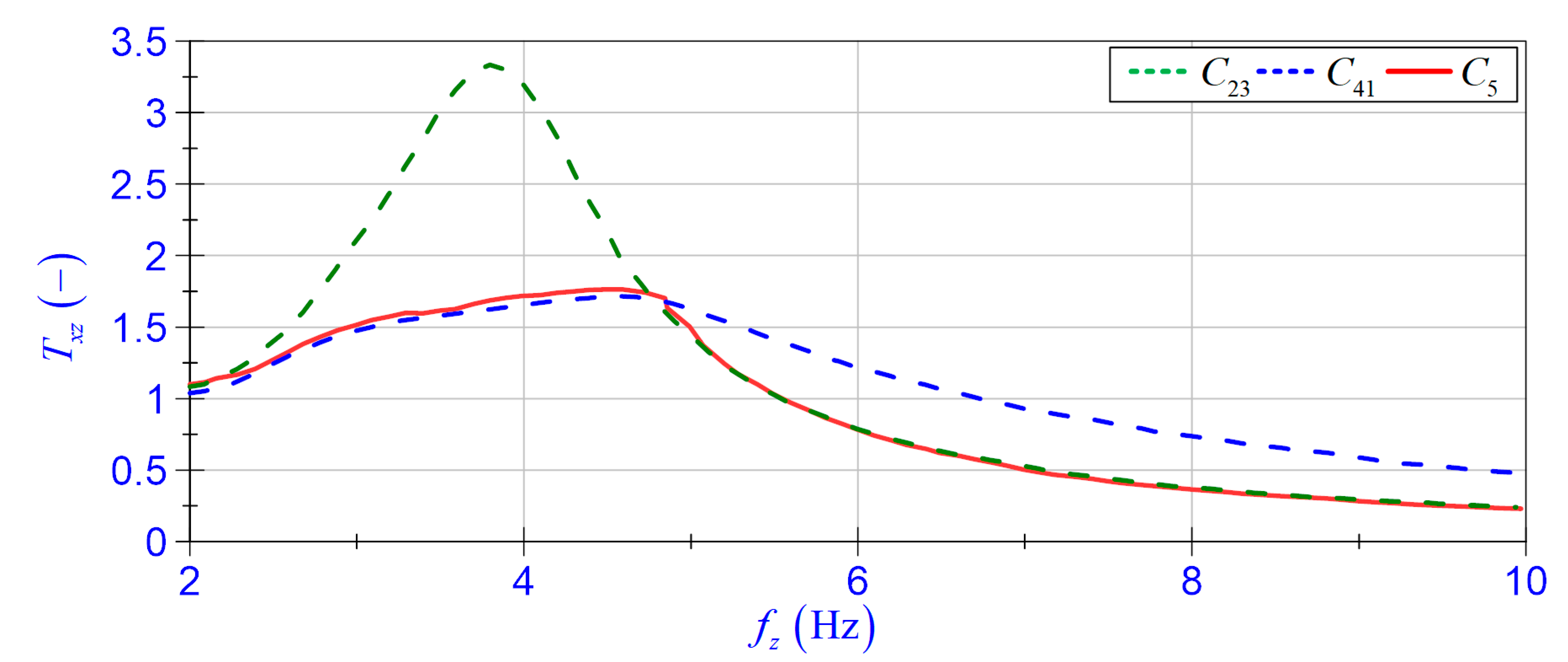
4.3.1. Displacement Transmissibility
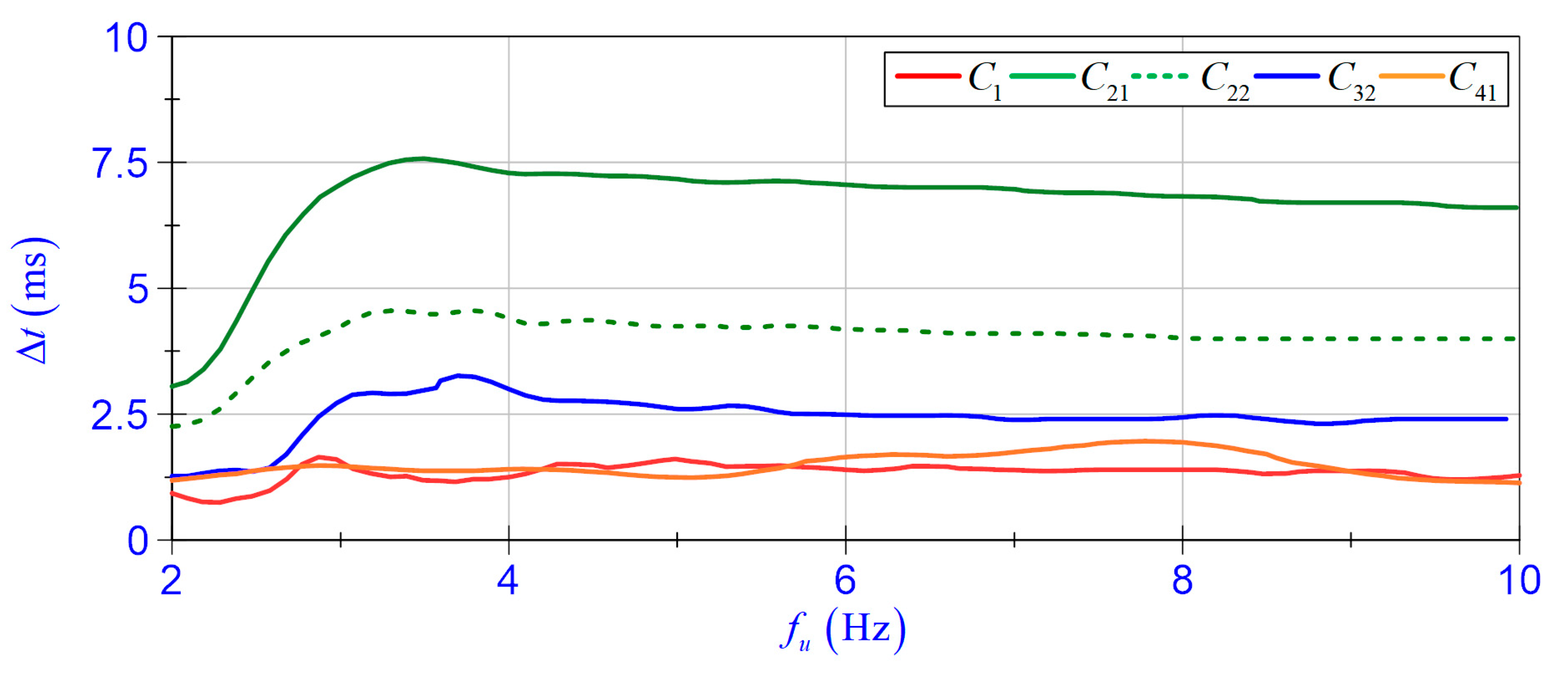
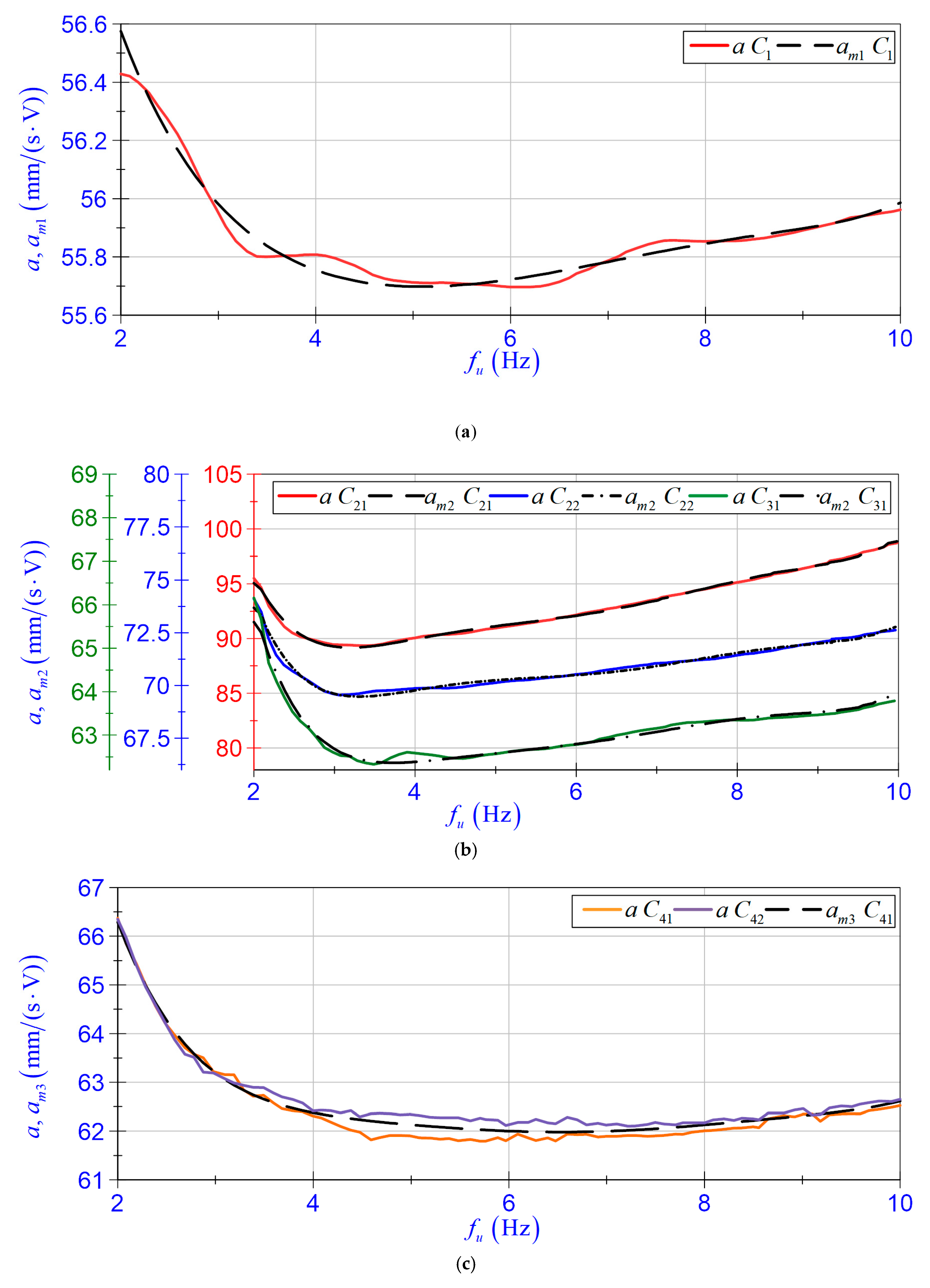
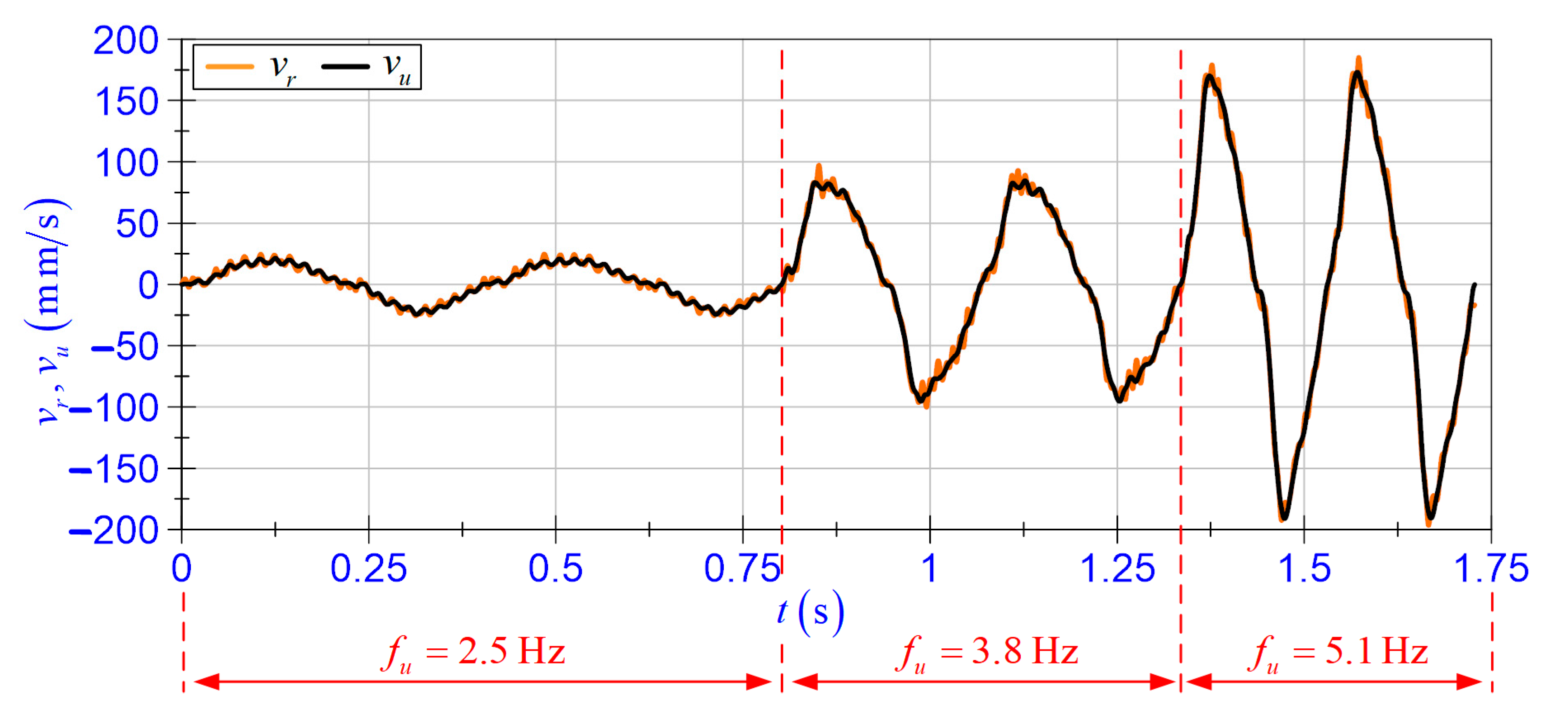
4.3.2. Self-Sensing Function
- Group 1 relates to case and the polynomial is denoted as ;
- Group 2 relates to cases , , , (where ) and the polynomial is denoted as ;
- Group 3 relates to cases and (where ) and the polynomial is denoted as ;
- Group 4 relates to cases and and the polynomial is denoted as .
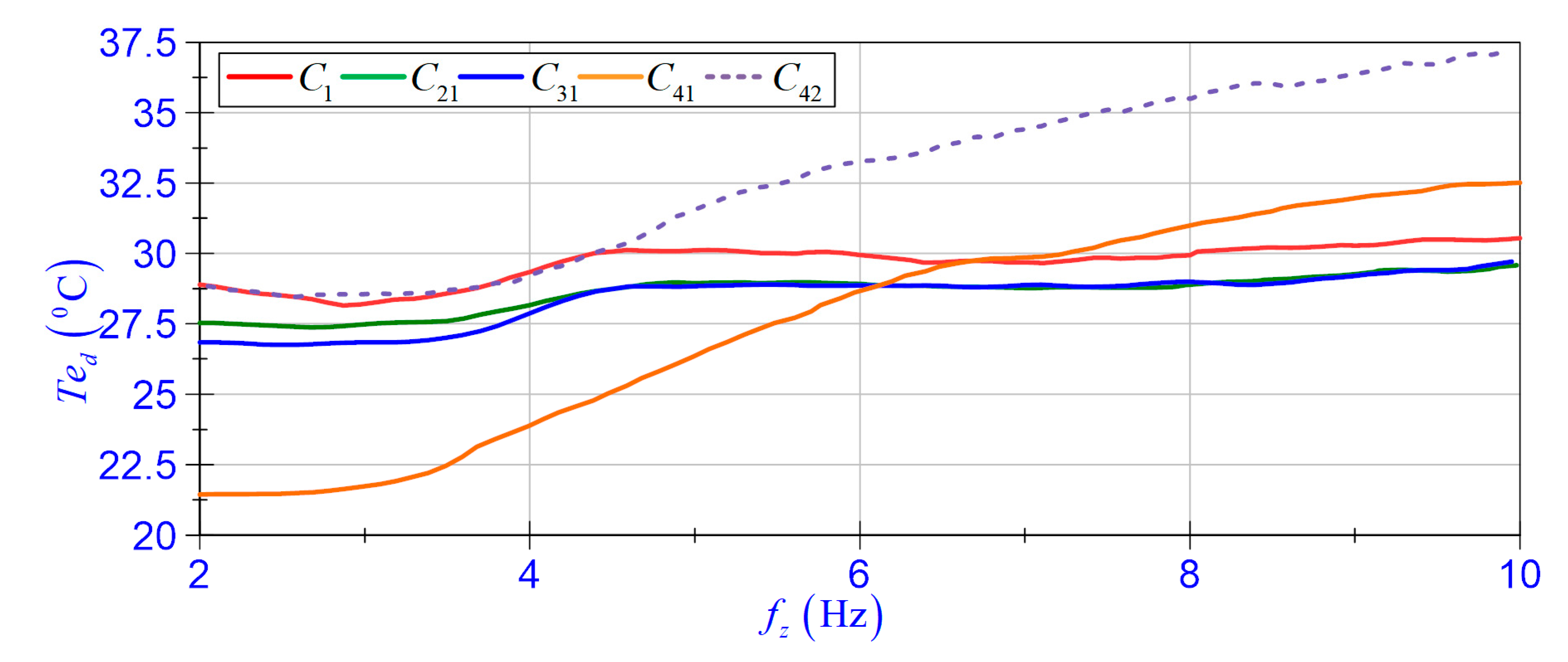
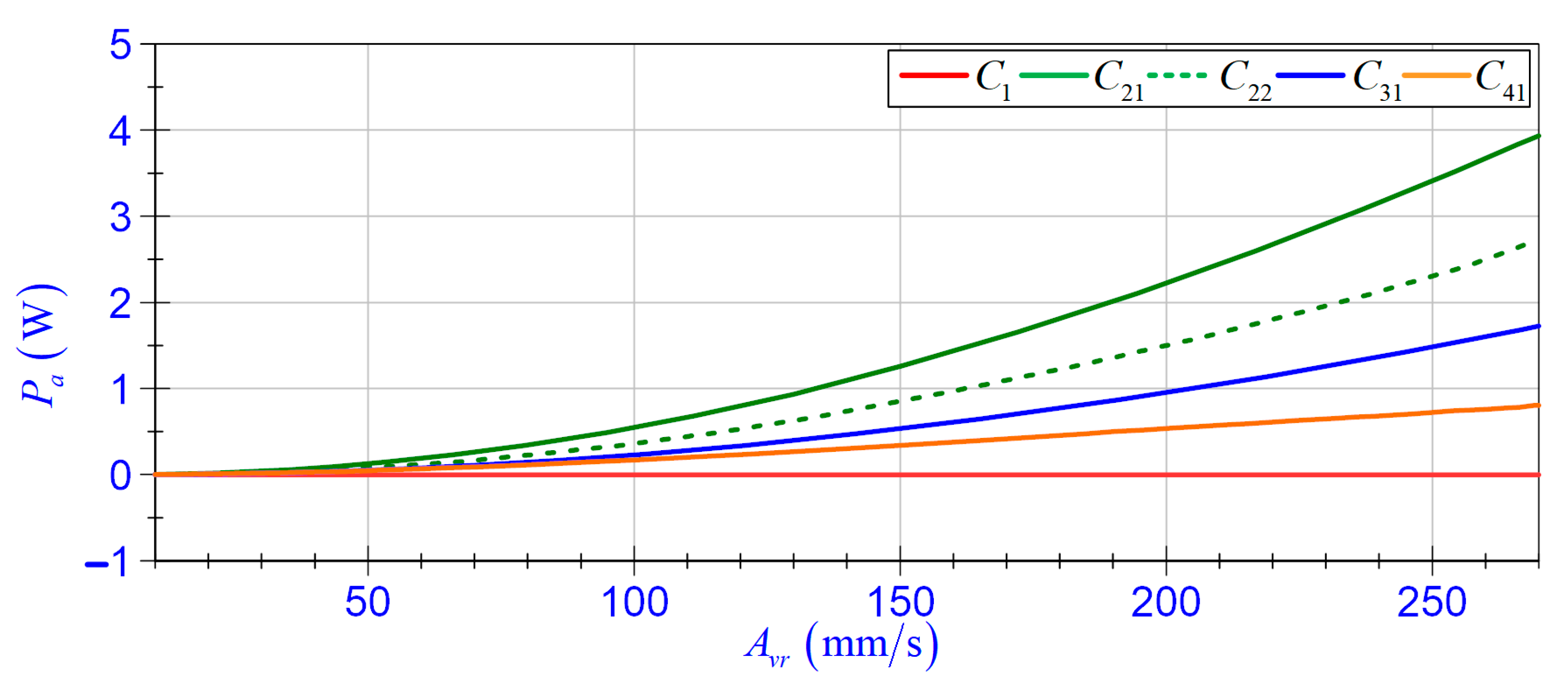
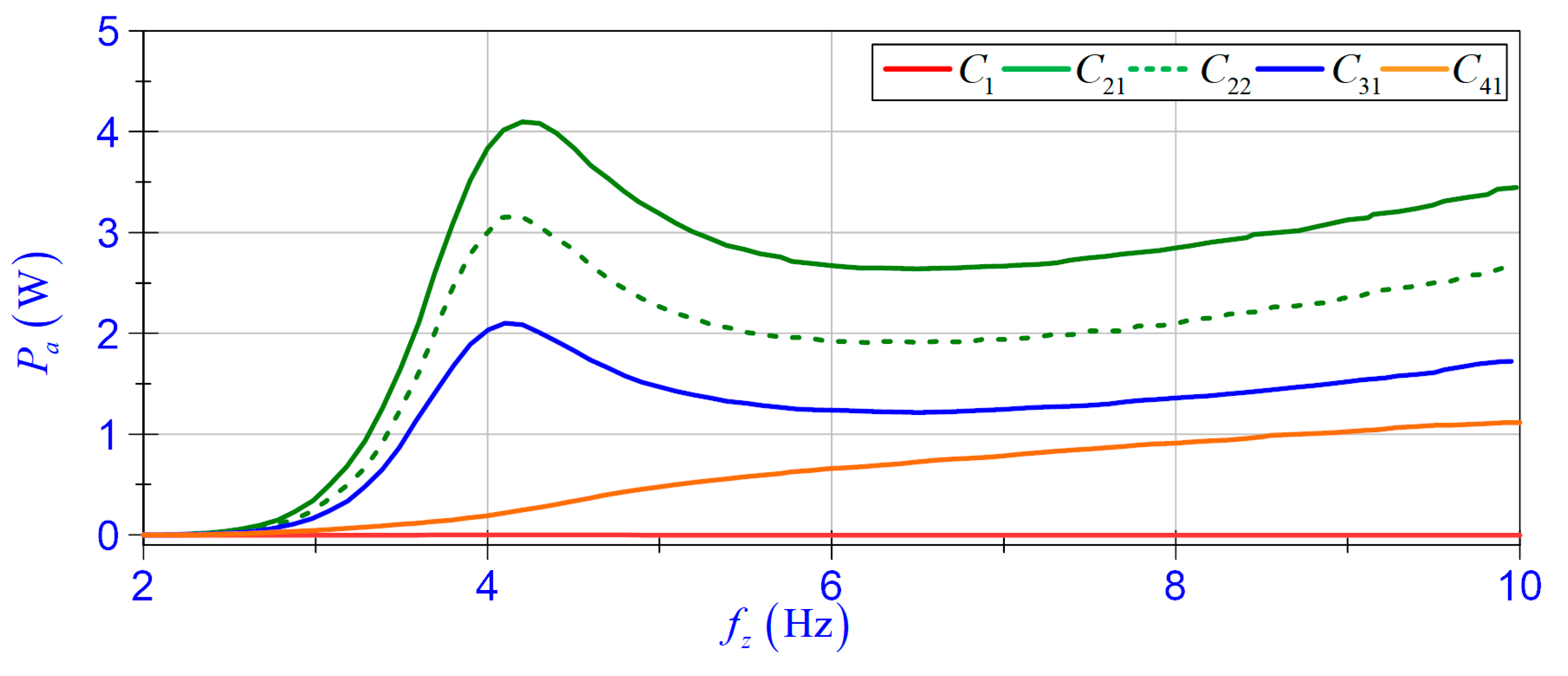
4.3.3. Self-Powered Capability
5. Self-Sensing and Self-Powered Action for Magnetorheological Damper Control
- Polytec OFV-505 [34] laser vibrometer cooperating with an OFV-5000 decoder (direct velocity measurement);
- FT50-RLA-70-PL5 [35] optical sensor running in speed mode with sampling frequency (in order to determine the velocity, differentiation of the recorded displacement is required);
- Lika SME54-YC-2-PROG-R-L2 incremental linear encoder running at the programmed resolution (the velocity was determined as a quotient of constant displacement and the time-lapse measured by a clock with oscillator).
6. Conclusions
- In the assumed range of excitations and the EV-EH coil load cases, the proposed self-sensing function represented the relative velocity with high accuracy;
- The maximum values of the time shift coefficient revealed that the self-sensing function can be employed as a feedback signal in the vibration control systems;
- The measure of uncertainty of the velocity depends on the standard deviation of voltage and the EV-EH coil load resistance. Moreover, the standard deviation of the velocity value is comparable with standard deviation of the velocity obtained for commercial transducers;
- In terms of the ambient temperature at which the study was conducted, it is not necessary to adjust the self-sensing function. In addition, the change in ambient temperature does not have a significant impact on the displacement transmissibility coefficient of the system;
- The average ratio of energy generated by the EV-EH may not be sufficient to power an industrial controller equipped with additional measuring transducers. However, replacing a transducer with a self-sensing function and use of a controller unit with low power consumption ensures powering the MR damper in the vibration control system;
- The practical implementation of the self-sensing and self-powered actions for the MR damper switching control was demonstrated for loading an EV-EH coil with resistance, although the reduction in this resistance increased the amount of recovered energy.
Author Contributions
Funding
Conflicts of Interest
References
- Cho, S.-W.; Jung, H.-J.; Lee, I.-W. Smart Passive System Based on Magnetorheological Damper. Smart Mater. Struct. 2005, 14, 707–714. [Google Scholar] [CrossRef]
- Choi, K.-M.; Jung, H.-J.; Lee, H.-J.; Cho, S.-W. Feasibility Study of an MR Damper-Based Smart Passive Control System Employing an Electromagnetic Induction Device. Smart Mater. Struct. 2007, 16, 2323–2329. [Google Scholar] [CrossRef]
- Sapiński, B. Energy-Harvesting Linear MR Damper: Prototyping and Testing. Smart Mater. Struct. 2014, 23, 035021. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, K.; Yu, F.; Gu, Y.; Li, D. Experimental Verification of Energy-Regenerative Feasibility for an Automotive Electrical Suspension System. In Proceedings of the 2007 IEEE International Conference on Vehicular Electronics and Safety, Beijing, China, 13–15 December 2007; pp. 1–5. [Google Scholar]
- Yu, M.; Peng, Y.; Wang, S.; Fu, J.; Choi, S.B. A New Energy-Harvesting Device System for Wireless Sensors, Adaptable to on-Site Monitoring of MR Damper Motion. Smart Mater. Struct. 2014, 23, 077002. [Google Scholar] [CrossRef]
- Chu, K.S.; Zou, L.; Liao, W.-H. A Mechanical Energy Harvested Magnetorheological Damper with Linear-Rotary Motion Converter. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, Las Vegas, NV, USA, 20 April 2016; p. 980309. [Google Scholar]
- Choi, Y.-T.; Wereley, N.M. Self-Powered Magnetorheological Dampers. J. Vib. Acoust. 2009, 131, 044501. [Google Scholar] [CrossRef]
- Jung, H.-J.; Jang, D.-D.; Lee, H.-J.; Lee, I.-W.; Cho, S.-W. Feasibility Test of Adaptive Passive Control System Using MR Fluid Damper with Electromagnetic Induction Part. J. Eng. Mech. 2010, 136, 254–259. [Google Scholar] [CrossRef]
- Jung, H.-J.; Jang, D.-D.; Koo, J.-H.; Cho, S.-W. Experimental Evaluation of a ‘Self-Sensing’ Capability of an Electromagnetic Induction System Designed for MR Dampers. J. Intell. Mater. Syst. Struct. 2010, 21, 827–835. [Google Scholar] [CrossRef]
- Wang, D.H.; Bai, X.X.; Liao, W.H. An Integrated Relative Displacement Self-Sensing Magnetorheological Damper: Prototyping and Testing. Smart Mater. Struct. 2010, 19, 105008. [Google Scholar] [CrossRef]
- Wang, D.-H.; Bai, X.-X. A Magnetorheological Damper with an Integrated Self-Powered Displacement Sensor. Smart Mater. Struct. 2013, 22, 075001. [Google Scholar] [CrossRef]
- Peng, G.; Li, W.; Hu, G.; Alici, G. Design and Simulation of a Self- Sensing MR Damper. In Proceedings of the 15th International Conference on Mechatronics Technology, Melbourne, Australia, 30 November–2 December 2011; pp. 112–117. [Google Scholar]
- Chen, C.; Liao, W.-H. A Self-Sensing Magnetorheological Damper with Power Generation. Smart Mater. Struct. 2012, 21, 025014. [Google Scholar] [CrossRef]
- Rosół, M.; Sapiński, B. Ability of Energy Harvesting Mr Damper to Act as a Velocity Sensor in Vibration Control Systems. Acta Mechanica et Automatica 2019, 13, 135–145. [Google Scholar] [CrossRef] [Green Version]
- Zhu, S.; Shen, W.; Xu, Y. Linear Electromagnetic Devices for Vibration Damping and Energy Harvesting: Modeling and Testing. Eng. Struct. 2012, 34, 198–212. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Zuo, L.; Kuang, J.; Luhrs, G. Energy-Harvesting Shock Absorber with a Mechanical Motion Rectifier. Smart Mater. Struct. 2012, 22, 025008. [Google Scholar] [CrossRef]
- Li, Z.; Zuo, L.; Luhrs, G.; Lin, L.; Qin, Y. Electromagnetic Energy-Harvesting Shock Absorbers: Design, Modeling, and Road Tests. IEEE Trans. Veh. Technol. 2013, 62, 1065–1074. [Google Scholar] [CrossRef]
- Ni, Y.Q.; Chen, Z.H.; Or, S.W. Experimental Identification of a Self-Sensing Magnetorheological Damper Using Soft Computing. J. Eng. Mech. 2015, 141, 04015001. [Google Scholar] [CrossRef]
- Chen, Z.H.; Ni, Y.Q.; Or, S.W. Characterization and Modeling of a Self-Sensing MR Damper under Harmonic Loading. Smart Struct. Syst. 2015, 15, 1103–1120. [Google Scholar] [CrossRef]
- Hu, G.; Ru, Y.; Li, W. Design and Development of a Novel Displacement Differential Self-Induced Magnetorheological Damper. J. Intell. Mater. Syst. Struct. 2015, 26, 527–540. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Zhou, W.; Li, W. A New Magnetorheological Damper with Improved Displacement Differential Self-Induced Ability. Smart Mater. Struct. 2015, 24, 087001. [Google Scholar] [CrossRef]
- Xinchun, G.; Yonghu, H.; Yi, R.; Hui, L.; Jinping, O. A Novel Self-Powered MR Damper: Theoretical and Experimental Analysis. Smart Mater. Struct. 2015, 24, 105033. [Google Scholar] [CrossRef]
- Guan, X.; Ru, Y.; Huang, Y. A Novel Velocity Self-Sensing Magnetorheological Damper: Design, Fabricate, and Experimental Analysis. J. Intell. Mater. Syst. Struct. 2019, 30, 497–505. [Google Scholar] [CrossRef]
- Sapiński, B. Vibration Power Generator for a Linear MR Damper. Smart Mater. Struct. 2010, 19, 105012. [Google Scholar] [CrossRef]
- MR Damper, RD-8048-1, Technical Documentation. Available online: https://www.lord.com (accessed on 1 March 2021).
- Sapiński, B. Experimental Study of a Self-Powered and Sensing MR-Damper-Based Vibration Control System. Smart Mater. Struct. 2011, 20, 105007. [Google Scholar] [CrossRef]
- Electromagnetic Vibration Systems, LDSV780, Technical Documentation. Available online: https://www.bksv.com/en/instruments/vibration-testing-equipment/lds-shakers/low-force-shakers/lds-v780 (accessed on 1 March 2021).
- CompactRIO Controller, CRIO 9063, Technical Documentation. Available online: https://www.ni.com/pl-pl/support/model.crio-9063.html (accessed on 4 March 2021).
- Programmable Linear Incremental Encoder, SME54-YC-2-PROG-R-L2, Technical Documentation. Available online: https://www.lika.it/eng/products/linear-encoders/incremental-1/sme54 (accessed on 30 October 2020).
- Batterbee, D.; Sims, N.D. Temperature Sensitive Controller Performance of MR Dampers. J. Intell. Mater. Syst. Struct. 2009, 20, 297–309. [Google Scholar] [CrossRef] [Green Version]
- Sapiński, B.; Orkisz, P.; Jastrzębski, Ł. Experimental Analysis of Power Flows in the Regenerative Vibration Reduction System with a Magnetorheological Damper. Energies 2021, 14, 848. [Google Scholar] [CrossRef]
- Jastrzębski, Ł.; Sapiński, B. Magnetorheological Self-Powered Vibration Reduction System with Current Cut-Off: Experimental Investigation. Acta Mech. Autom. 2018, 12, 96–100. [Google Scholar] [CrossRef] [Green Version]
- Terasic DE10-Lite, User Manual. Available online: https://www.terasic.com.tw/cgi-bin/page/archive.pl?Language=English&CategoryNo=218&No=1021&PartNo=4 (accessed on 10 March 2021).
- Measuring Vibrations, Polytec OFV-505, Technical Documentation. Available online: https://www.polytec.com/us/vibrometry/products/single-point-vibrometers (accessed on 1 March 2021).
- Optical Sensor, FT 50RLA, Technical Documentation. Available online: https://www.sensopart.com/en (accessed on 30 October 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | |||
|---|---|---|---|
| Transducers | Standard Deviation of Velocity | Power Consumption W |
|---|---|---|
| Laser vibrometer Polytec OFV-505 | ||
| Optical distant sensor FT50-RLA-70-PL5 | ||
| Linear encoder SME54-YC-2-PROG-R-L2 | ||
| Absence (self-sensing function for case () |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sapiński, B.; Orkisz, P. Real-Time Sensing Action of the Electromagnetic Vibration-Based Energy Harvester for a Magnetorheological Damper Control. Energies 2021, 14, 2845. https://doi.org/10.3390/en14102845
Sapiński B, Orkisz P. Real-Time Sensing Action of the Electromagnetic Vibration-Based Energy Harvester for a Magnetorheological Damper Control. Energies. 2021; 14(10):2845. https://doi.org/10.3390/en14102845
Chicago/Turabian StyleSapiński, Bogdan, and Paweł Orkisz. 2021. "Real-Time Sensing Action of the Electromagnetic Vibration-Based Energy Harvester for a Magnetorheological Damper Control" Energies 14, no. 10: 2845. https://doi.org/10.3390/en14102845
APA StyleSapiński, B., & Orkisz, P. (2021). Real-Time Sensing Action of the Electromagnetic Vibration-Based Energy Harvester for a Magnetorheological Damper Control. Energies, 14(10), 2845. https://doi.org/10.3390/en14102845