1. Introduction
The UAV and fuel cell industries are seeking to enhance the capability and performance of miniature unmanned aerial vehicles (MUAVs) powered by fuel cells as propulsion systems [
1,
2,
3]. MUAVs are primarily used for surveillance, target engagement and tracking missions [
4]. Such missions require the MUAV to possess long endurance performance characteristics capable of maximizing the UAV flight time [
5]. Hence, there will be more fuel and a larger UAV propulsion system size in terms of engines, fuel storage and other components. Similarly, electric propulsion systems that utilize batteries as the main power source also require more batteries to increase the endurance of the UAV, and hence, increase UAV weight. This leads to an increase in UAV size and thus more drag force. At a certain point, the UAV will reach a threshold in which adding more fuel or batteries will increase the total weight and size, and in turn, will decrease the endurance. Moreover, such a solution is not effective, as it will increase both the initial and the running costs. Second, there is a need for new power sources that lower the dependence on fossil fuel and achieves more sustainability. Third, an environmentally friendly power source such as solar cells or fuel cells will be considered as a better alternative to internal combustion engines [
6,
7].
Hand launched unmanned aerial vehicles are considered to be a good choice for small scale UAVs designed for long endurance flight missions as they have many advantages over other types of MUAVs [
8,
9,
10]. First, hand launched UAVs do not require runways or mechanical launching aids. Second, they require less training and less setup time. Third, they can have longer endurance because they require less power for take-off during flight missions.
Figure 1 shows a sample of the most popular MUAVs in which endurance versus take-off mass is shown. It can be concluded from
Figure 1 that more endurance requires more take-off mass. Improving MUAVs performance characteristics requires a combination of reducing the take-off mass and increasing the flight duration.
Deployment of PEMFC hand launched UAVs emerges some challenges that can lead to better performance characteristics. There is a contradiction between the takeoff mass requirements and long endurance flight missions which results in high take-off/endurance ratio such as in [
11,
12]. Increasing the endurance means increasing the energy storage. Increasing the energy storage results in the increase of the takeoff mass. However, the takeoff mass is limited to the ability of the user. There is a need for a well-developed flexible optimization scheme to give the optimal solution among the tradeoff between flight endurance and takeoff mass.
Most MUAVs shown in
Figure 1 use batteries as the main power supply [
13,
14]. PEM fuel cells have proposed a very good solution due their high energy densities that can reach up to five times compared to lithium ion batteries [
15,
16]. Talking about PEM fuel cell includes the study and analysis of fuel cell subsystems as well. PEMFC is a very sensitive and costly device that should be analyzed correctly. PEMFC models still need further validation and analysis when integrated in MUAV propulsion systems because they tend to show difficulties with temperature change and transient response [
17,
18,
19,
20].
A high-level conceptual design study of small-scale long-endurance aircraft was performed in [
20]. It was found that fuel cell model that depends on polarization curve resulted in accurate fuel cell voltage and current predictions. Lindhal and his team introduced a mathematical derivation, simulation and validation of a simple propulsion system for UAV at steady state conditions [
13]. The propulsion system components used were a solid oxide fuel cell (SOFC) as the power source, motor controller, brushless motor and propeller. The results validation showed a good agreement between simulation and wind tunnel test results. A team from Colorado State University succeeded in designing, building and flying a fuel cell powered UAV [
11]. The goal of the study was to achieve 24 h endurance. The team was able to achieve up to 28 h of flight but the aircraft had a high take-off/endurance ratio. Wagner et al. in [
14] have developed an in-depth mathematical formulation for a hand launched UAV to achieve long endurance. The optimization technique used to solve the DSM was a genetic algorithm. Results showed that a notable improvement of the UAV endurance from 2 h to almost 6 h. However, the main power source was a lithium polymer battery and not a fuel cell. Moreover, a basic fuel cell powered UAV was carried by a team from Sydney University [
17]. It included a preliminary design with a demonstrator to validate the UAV performance. The work included a good aerodynamic modeling. However, fuel cell system model was poor because the reference presented only the rate of hydrogen consumption of the PEMFC without further investigation. Furrutter et al. designed a small PEM fuel cell powered UAV. The fuel cell was used in the steady flight condition and it had a power supply of 100 W. Mathematical formulation and derivation was presented in [
18] with the achievement of total endurance of 150 s and the designed UAV showed a high drag force. Lapena Rey et al. in [
19] succeeded to achieve a 4 h theoretical endurance for 200 W PEM fuel cell powered UAV. The team used a hydrogen generator kit as a fuel source. The MUAV succeeded to fly for 130 min and the hydrogen generator faced thermal activity that limited the UAV flight endurance. Another fuel cell powered UAV was introduced in [
12] using a 550 W PEM fuel cell integrated with Li-Po battery. A qualitative and quantitative analysis for hydrogen storage tank was implemented. Thermal management that depended on a fin-and-tube radiator with an external fan was designed instead of having traditional radiators that would have a high surface area. The UAV succeeded to fly for 23 h and 19 min with the achievement of specific energy of 1170 Wh/kg.
This paper presents the design, development and validation of a flexible optimization scheme that can be used in the design of any PEMFC powered UAV of a small scale with validated design results. The major contributions of this research concentrate on the integration of PEMFC and its components into the optimization scheme. This in term includes hydrogen subsystem and oxygen subsystem. In addition, the integration of the wing/tail design/selection into the optimization scheme are considered in the analysis. The paper also developed a flexible selection scheme that can be utilized by other interested researches in the field. This scheme composed of hundreds of commercial off-the-shelf components that includes propellers, motors, hydrogen tanks and PEMFCs in which the selected components in the optimization will produce the optimum flight endurance. The results are validated through both wind tunnel tests and the development of a novelty method of the HiL simulation tests. The new developed MDO can be successfully implemented by other researches and be used in MATLAB optimization toolbox easily.
To meet this paper objectives, the paper is organized as follows:
Section 2 describes the technical approach.
Section 3 includes the UAV conceptual design which defines the UAV baseline configuration.
Section 4 includes the preliminary UAV design which includes the development of the multi-disciplinary design analysis (optimization of inner loop modeling).
Section 5 includes the detail design which includes the development of the multi-disciplinary design optimization (optimization of outer loop modeling).
Section 6 includes the results of the analysis and the validation of results through wind-tunnel tests and hardware in the loop simulation tests.
2. Technical Approach
The design process is divided into three main parts; UAV conceptual design level, UAV preliminary design level and then a detail design level. In the UAV conceptual design level, the design requirements and constraints are specified. After that, the design space exploration process defines a number of alternatives through a matrix of alternatives that meets the design requirements. Then, the base line aircraft configuration is analyzed through a qualitative and quantitative study for the matrix of alternatives. Based on that, design variables and design matrices are defined.
Aircraft design consists of subsystems which are described as multi-disciplinary complex systems by nature such as fuel cell and propeller subsystems. This requires simplifications and decomposition schemes to provide a well-structured method for analyzing the MDA which are done in the preliminary design stage.
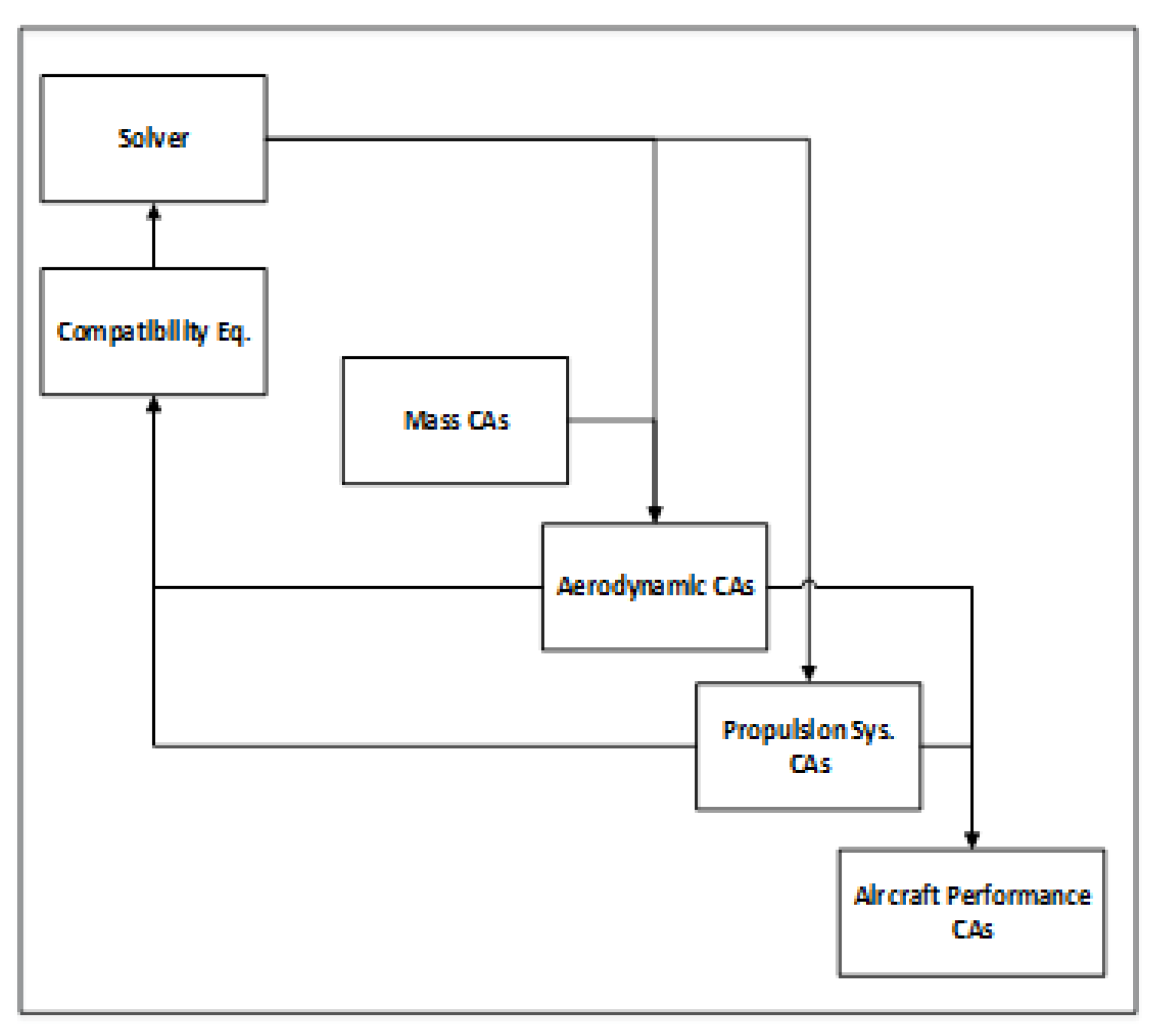
Figure 2 illustrates the process of obtaining a logical MDA for aircraft design. First, different design variables and objectives should be defined. These design variables are modeled in their contribution analyses. A design structure matrix is needed for managing the flow of information among different contributing analyses. DSM should be fitted into MDA framework solution scheme that guarantees that all design objectives are met. MDA flexible framework includes compatibility equations and nonlinear solvers. So, the preliminary design level allows for in depth analysis for the baseline UAV defined in the conceptual design. In addition, all powertrain components are modeled in this stage.
The detail design part main objective is to optimize the different propulsion system components and design variables to the given PEM fuel cell and fuselage including the total aircraft mass. In this stage, all components’ models are defined but the components themselves are not selected yet because there are many commercial off-the-shelf components that are visualized in the optimization space. As a result, an optimization scheme is developed in this part to select the components of the powertrain and wing geometry and obtain all their design variables that will result in the optimum aircraft endurance. The optimization scheme best described as “mixed discrete continuous” because the solution is structured based on DSM rather than a close form mathematical model for the objective function. Genetic algorithm stands to be one among the best solution methodologies for such optimization scheme. In addition, results comparison and validation through conducting wind tunnel test and hardware in the simulation (HiL) tests are carried on in this section.
The UAV conceptual design task is to define a baseline aircraft configuration through defining a design space and defining an initial UAV structural design.
2.1. Design Space Definition
The aircraft is a hand-launched UAV which is considered to be a small scale aircraft with maximum take-off weight equals to 85 N. This weight is considered to guarantee hand-launchability. In addition, design requirements are necessary to satisfy the UAV to fly at low altitude and low cruising speed of 200 m and 20 m/s, respectively. This flight speed ensures that the Reynolds number will stay in the laminar region.
A quantitative study of the market was achieved to select the fuel cells that can be integrated with the UAV. Three fuel cells of interest were found; 200 W, 400 W Aeropack Horizon fuel cells and 500 W Ion Tiger fuel cell. Since the design is for long endurance flight mission, it was decided to choose the 200 W fuel cell as the total aircraft weight will not exceed 85 N. Hence, the design of the UAV should have a high aerodynamic efficiency, low drag, low pitching moment and ease of manufacturing. Based on these design requirements, a matrix of alternatives is built to down select the conceptual aircraft design attributes as shown in
Table 1. Based on quantitative and qualitative calculations and statistics as well as previous aircraft projects, the final conceptual design was selected from hundreds of possible combinations from the matrix of alternatives.
The selected vehicle configuration is conventional which is used widely for small scale UAVs due its proper gripping surface. Aircraft mass will vary during the optimization process based on the selection process of different propulsion system components and wing airfoil. As a result, canard vehicle configuration was not selected due sensitivity to weight changes and weight distribution. While flying wing selection contradicts with the hand launchability design requirement.
For better stability and control of the aircraft, tapered planform with conventional tail was selected. For the wing type, a high wing was selected based on historical data of hand launched fixed wing aircrafts and taking into consideration ease of hand-launchability. In addition, the wing is placed in a way that the aircraft center of gravity is below the wing neutral point, as this will cause an opposing moment due any pitch disturbance.
In addition, a high aspect ratio equals initially to 10 was selected because of high aerodynamic efficiency design requirement criteria. Fuselage shape was cylindrical as it’s easier to manufacture taking into consideration propulsion system components’ sizes. The landing gear selection resulted in a simple retractable landing gear. Finally, a tractor propeller position was selected for lower drag and pitching moment.
Chemical hydride technology was not feasible in the selection of hydrogen storage because it has a high cost and it needs a continuous maintenance and change of its special catalyst. Carbon fiber showed better weight specifications than aluminum composites tanks. As a result, it was decided to use carbon fiber material in the hydrogen storage tank design process.
Aircraft structural material is composed mainly of carbon fiber due its high strength and stress specifications with lightweight specifications compared to other composites. The wing tubes are made of carbon fiber sandwiched structure with balsa wood due its softness specifications.
2.2. Initial Aircraft Structural Design Sizing
The total lift and drag coefficients are obtained by defining the cruise speed and maximum weight. Then, fuselage is designed taking into consideration different components’ sizes.
A parametric study was conducted to set initial values for the coefficient of lift, wing surface area and UAV total weight assuming an altitude of 1000 m as shown in
Figure 3 using integrated Lift equation. The parametric study resulted in air cruise speed equals to 17.8 m/s, which is close to the design requirement. The coefficient of lift is set equal to 0.4, wing surface area equals to 0.9 m
2 and UAV weight equals to 75 N. Even though lower cruise speed is possible, it will lead to higher coefficient of lift, which is considered less practical and harder to achieve. While using the integrated Drag equation and knowing that maximum power available is 200 W, another parametric study was conducted to specify the maximum coefficient of drag. The value resulted is
CDmax = 0.067.
Total drag coefficient is composed of induced drag and parasitic drag covered by the following equations:
where
is total coefficient of lift,
represents Oswald efficiency factor ranges from 0.85 to 0.95 depending on how much elliptic the shape is [
21]. Parasitic drag is drag generated from other non-lifting parts such as fuselage. Hence, total drag coefficient is:
Based on the selected values of the aspect ratio and UAV weight and wing surface area, the wing geometry design specifications are shown in
Table 2. For vertical and horizontal wings, sizing is based on coefficient of vertical and horizontal wings covered by the following equations and results summarized in
Table 3. Finally, cylindrical streamlined fuselage shape is designed with specifications shown in
Table 4.
4. UAV Detailed Design (Optimization)
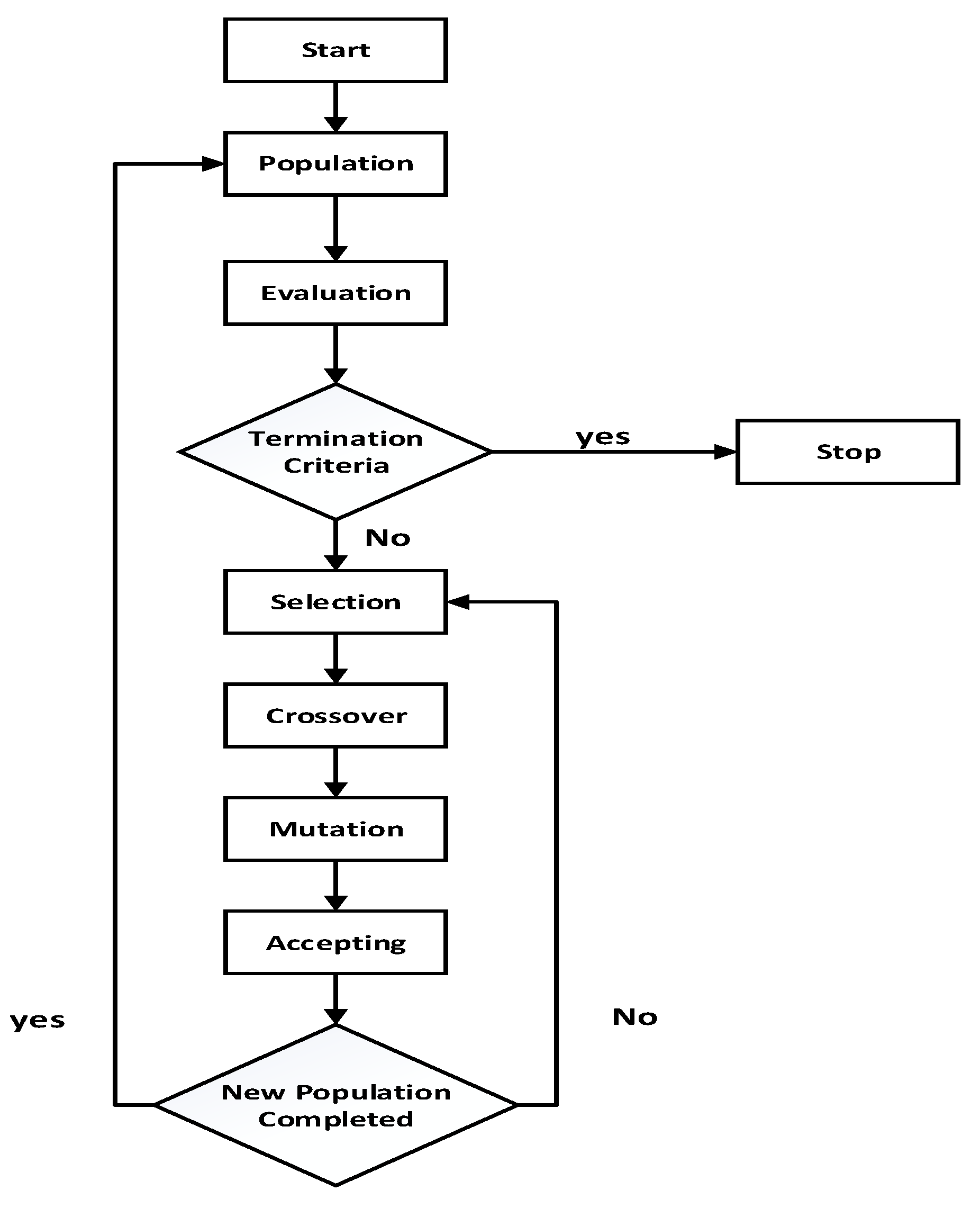
Genetic algorithms are commonly used technique to search for optimal operational points especially in cases of complex problems where there is no fixed mathematical formulation frame to solve the optimization problem [
38,
39,
40]. GA optimization technique depends on evolutionary programming to search for optimal results [
41]. GA flowchart is shown in
Figure 12.
4.1. Genetic Algorithm Problem Formulation
The objective function of interest is the aircraft endurance. The optimization scheme main task is to maximize the objective function given in Equation (29):
The negative sign in Equation (29) is introduced to maximize the endurance.
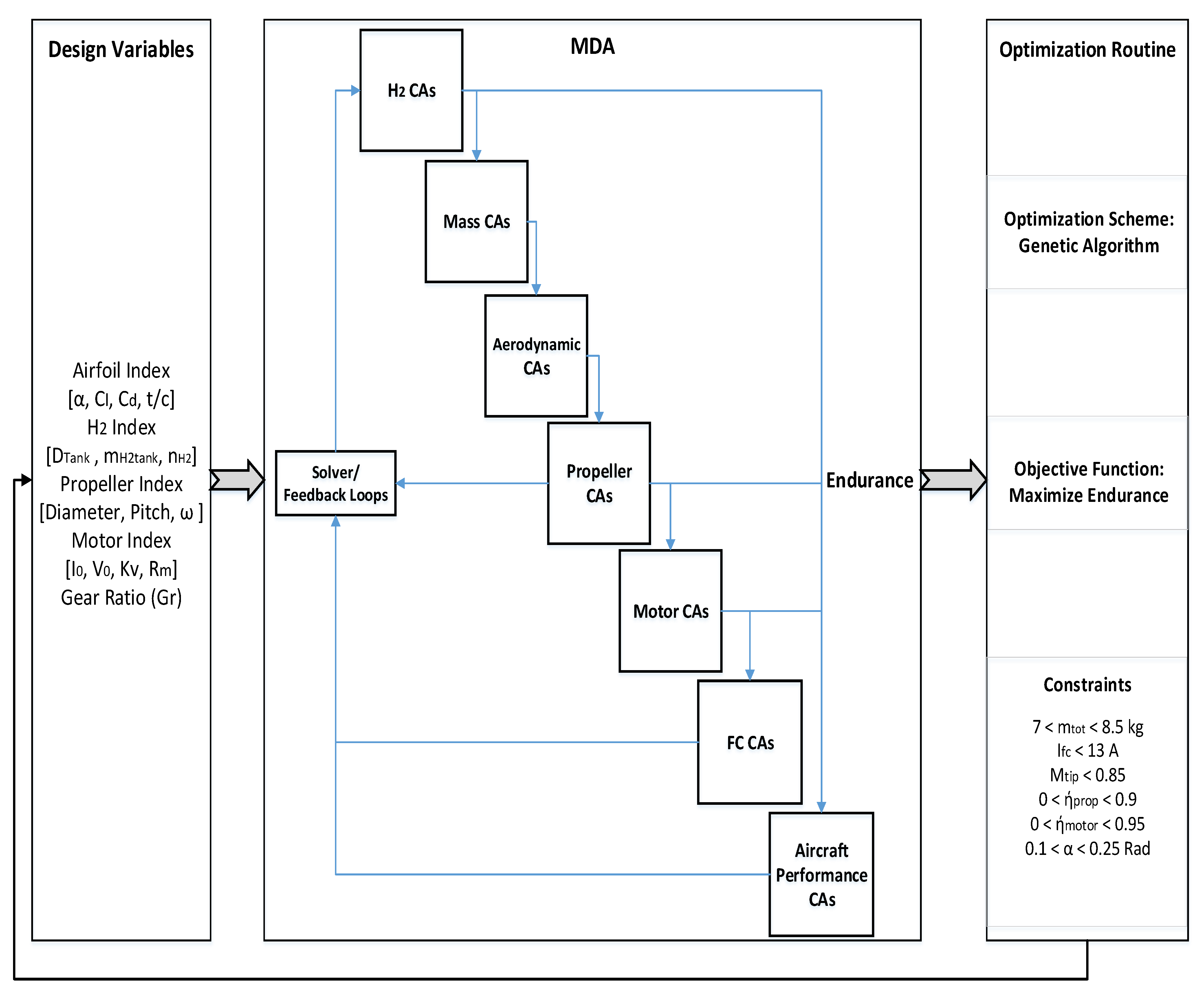
Design variables and constraints are illustrated in
Figure 13. The optimization scheme involves discrete and continuous design variables. These design variables are the airfoil index, motor index, propeller index, and hydrogen tank index. Design variables associated with the component indexes are illustrated in
Figure 13. Since commercially off-the-shelf (COTS) ready components will be used, thousands of possible combinations of wing geometries, hydrogen tanks, motors and propellers could be visualized. For this study, 3 selected airfoils, 42 available BLDC motors’ models supplied from Hacker Motors and AXI Motors are selected for the analysis and 57 propellers ranges from 12–27 inch diameter manufactured by APC are selected and the PEMFC current ranged from 0 to 13 A. For hydrogen tank, the selection process will be done after getting the hydrogen tank design variables solution but the maximum allowable diameter is 180 mm and length of 400 mm to guarantee its fit in the fuselage.
Design constraints are defined to guarantee the feasibility of the proposed solutions. These constraints are the aircraft mass, fuel cell current, propeller tip Mach number, motor and propeller efficiency, and angle of attack as presented in
Figure 13.
The developed genetic algorithm code will be used is the GA toolbox and direct search box provided by MATLAB. The evaluation of the fitness function used is the same that is developed in the design structure matrix as indicated in
Figure 13. After defining the optimization scheme, objective functions, all design variables and constraints; the multi-disciplinary design optimization is obtained as presented in
Figure 13. This optimization scheme stands as the baseline flexible framework that can vary depending on the implementation.
4.2. Optimization Results
The problem formulation of the multi-disciplinary design optimization analysis is fully summarized in
Table 5 and
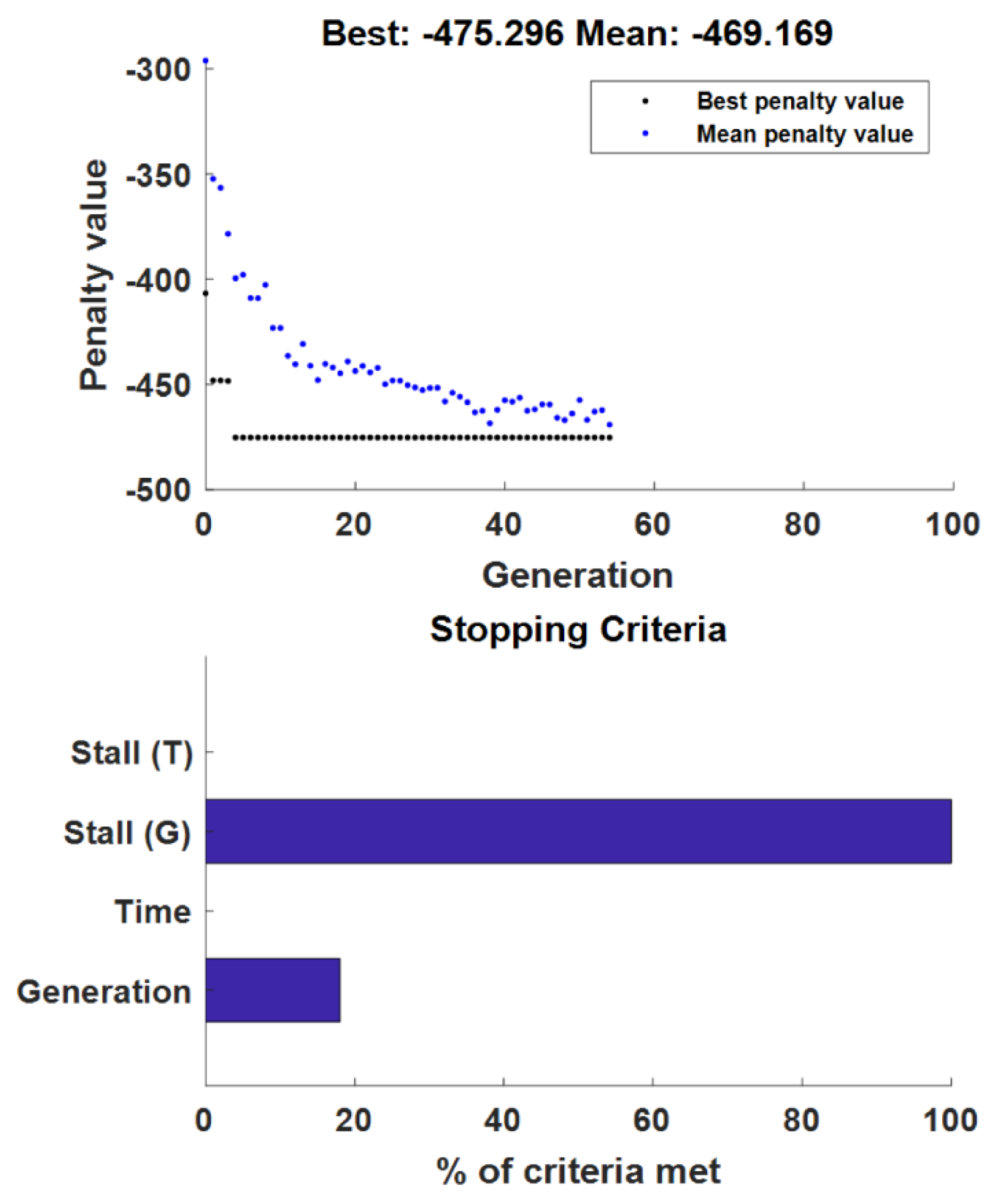
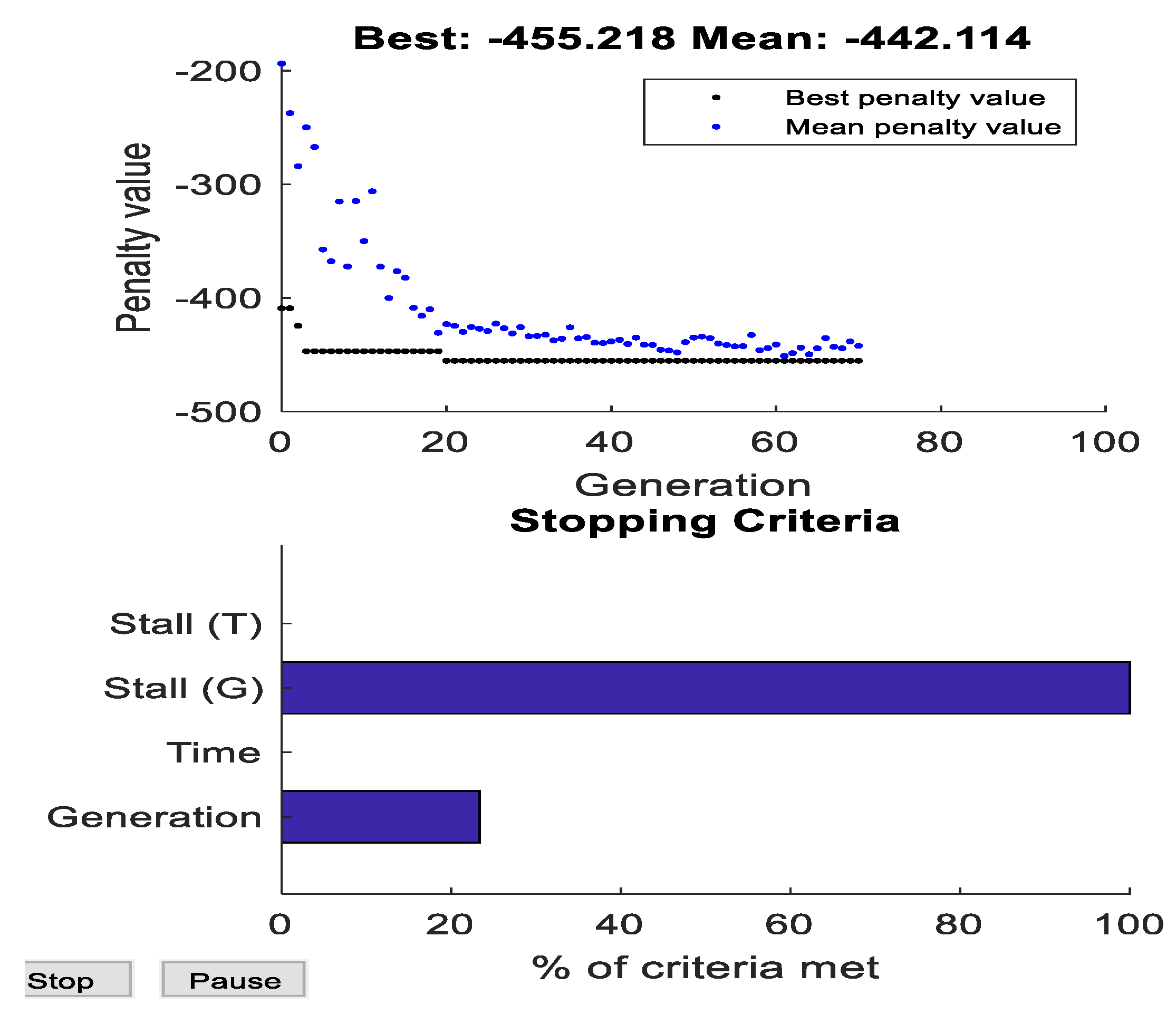
Table 6. This analysis was conducted assuming steady level flight performance using genetic algorithm as the optimization routine. The evolution history of the optimization scenarios are also presented in
Figure 14 and
Figure 15 in which the top graph represents the penalty function value while the bottom one represents the stopping criteria.
Figure 14 shows the obtained results for the maximum endurance while
Figure 15 shows the results for the maximum range.
The penalty function graph indicated in blue dots represents the mean value of the penalty function while the black dots represent the best value at each generation. The penalty function evaluation consists of two main parameters namely constraints and fitness functions. For each parameter, the penalty function picks a design entity from the created population mentioned above at each generation for checking its consistency with the design parameter. In the case of consistency, the fitness function value is set to be equal to the value of the penalty function. Otherwise, the value of the penalty function is also set to be equal to the maximum fitness value among the worst feasible members of the population. For the subsequent generation, the values chosen are those with the minimum penalty function values. As the optimization routine process is carried on, each new generation is converged to the best penalty function value. This is because of the reproduction process of the new generation that takes into consideration the relation of the best penalty function and new parents selection process.
Bottom graph included the stopping criteria in which if any of the termination criteria are met, it will cause the optimization process to be stopped. The stall time criteria evaluates the improvement of the objective function over a specified time interval. The time interval is set equal to the time criteria, which is set to be equal to infinity. The stall generations criteria evaluate the weighted average change in fitness value for a stall generation that is equal to almost 50. The specified value for the change is sit equal to a tolerance value of 1 × 10
−6. Finally, the number of generations is set to be 100. If the optimization process reaches the maximum number of generations, the process is terminated. As can be seen from
Figure 14 and
Figure 15, the optimization process for maximum endurance was terminated after 59 generations and 2403 fitness functions evaluations. As for the range optimization process, a total number of 2841 fitness function values were evaluated and 70 generations were created. For both scenarios, the stall (G) generation criteria was satisfied as the change in the stall generation was too small, less than 1 × 10
−6, and the penalty function value converged to the minimum objective function value.
Selected indices for both scenarios resulted from the optimization process are listed in
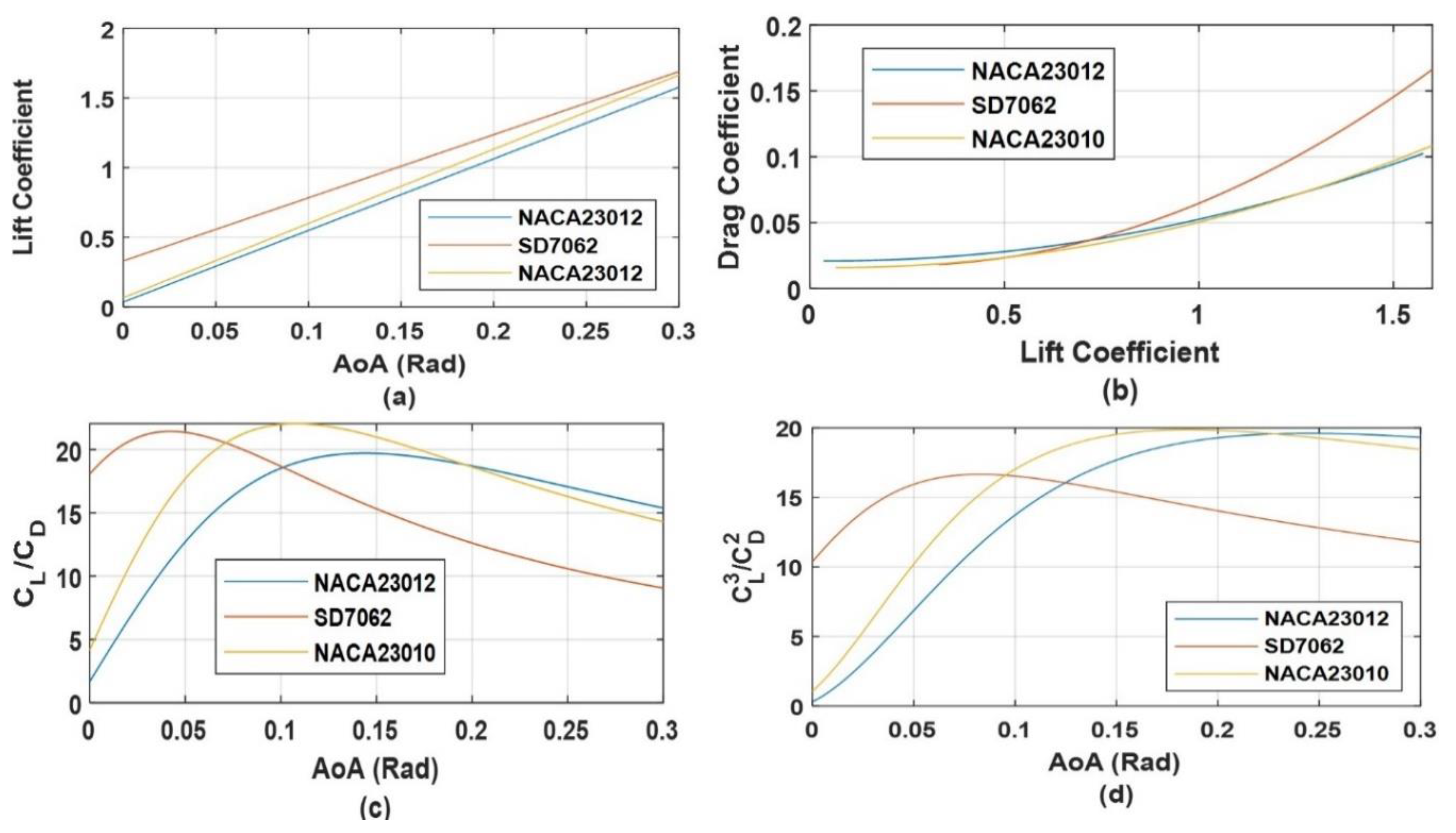
Table 7. The selected airfoil that resulted in both maximum endurance and maximum range is NACA23010. As stated previously, to maximize endurance,
should be maximized which corresponds to an angle of attack equals 11° for UAV with NACA23010 airfoil. While in order to maximize range,
should be maximized which corresponds to an angle of attack equals to 7° for the same UAV. UAV with NACA23010 gave better performance characteristics in terms of endurance and range than other airfoils.
The hydrogen tank diameter is 144 mm and length of 322 mm. The calculated weight is 1.65 kg. The nearest commercially available carbon fiber tank has specifications of 130 mm diameter, 300 mm length and 1.55 kg weight. The total UAV weight constraint limited the hydrogen tank size because the bigger the hydrogen tank, the more compressed hydrogen will be.
Hydrogen consumption is always a function of the generated fuel cell current. Thus, the lower the fuel cell current, the lower the hydrogen consumption and a higher endurance is achieved. The resulted fuel cell current value is the lowest possible operational value in both cases. Motor index chosen for both cases is the same due its lower Kv compared to other motors indices. A motor with low Kv produces lower rotational speed than a high Kv motor at the same voltage. In order to compensate for that, a propeller with bigger diameter relatively is required. Hence, the resulted propeller indices for both scenarios are relatively high especially in the first scenario where higher thrust is required.
Other performance parameters are listed in
Table 8. Power produced in the second scenario is higher than the first one. This is because the rotational speed in the second scenario is higher. As a result, the hydrogen flow rate in the second scenario is higher as well. Finally, the coefficients of lift and drag for the first scenario are higher than the second scenario. This is due to the fact that angle of attack that produces the longest flight endurance is higher than the angle of attack that produces the maximum flight range.
6. Conclusions
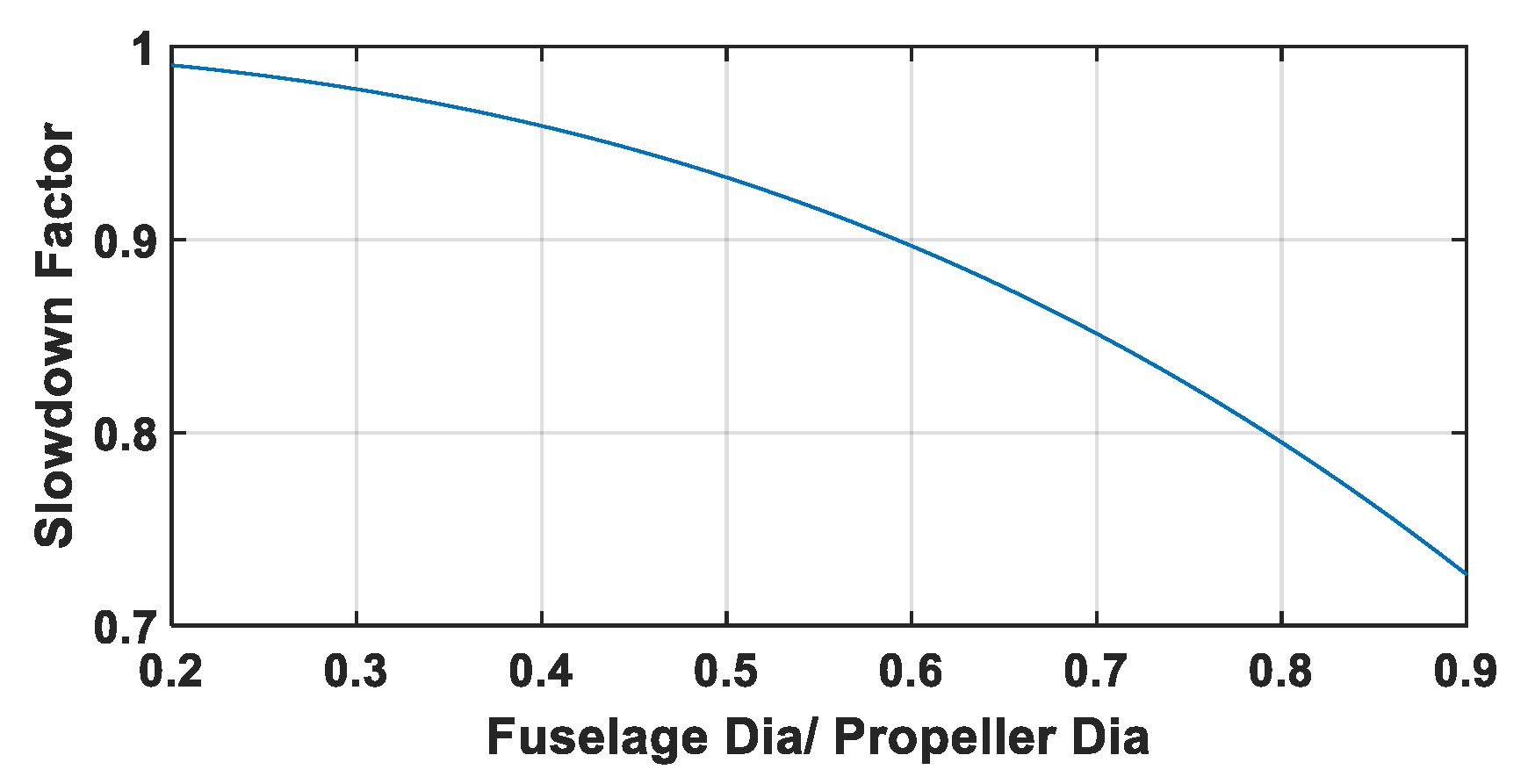
In this study, a flexible optimization tool was successfully developed for the design of a hand launched fixed wing fuel cell-powered UAV. The design was decomposed into three levels. In the conceptual design level, the aircraft baseline configuration was defined. While in the preliminary design level, the aircraft design was decomposed into subsystems defined as contributing analyses. For the hydrogen storage vessels, it was found that storing hydrogen in a composite fully wrapped vessels such as carbon-fiber increased the hydrogen content because it has better performance characteristics than other types of tanks in terms of pressure, volume and weight. In addition, a fuel cell model that used polarization curve fit showed acceptable results in terms of obtaining the required voltage and current. A propeller model that includes the effect of propeller-fuselage interference showed consistent results. The inclusion of components’ masses in the design process resulted in the increase of the endurance-takeoff mass ratio.
The contributing analyses were combined in a multidisciplinary analysis through a design structure matrix. The developed MDA is considered as a flexible framework scheme for the design of small-scale fuel cell-powered UAVs and can be modified based on the design requirements. The MDA is solved iteratively by setting the non-linear compatibility equations equal to zero. The solver used in the analysis was “fsolve” function in Matlab that uses the trust region dogleg method for solving nonlinear systems.
In the detailed design process, an optimization tool for the design of the UAV powertrain was developed and analyzed. The optimization technique used was genetic algorithm in which hydrogen tank, motor and propeller combinations were varied until an optimal solution was defined. The genetic algorithm is considered to be a very good choice to such design processes because it has flexibility in defining many near optimal designs. Results showed that the lower the fuel cell current, the better aircraft endurance is achieved. In addition, a motor-propeller combination in which bigger diameter propeller and lower motor voltage constant proofed to improve the UAV endurance.
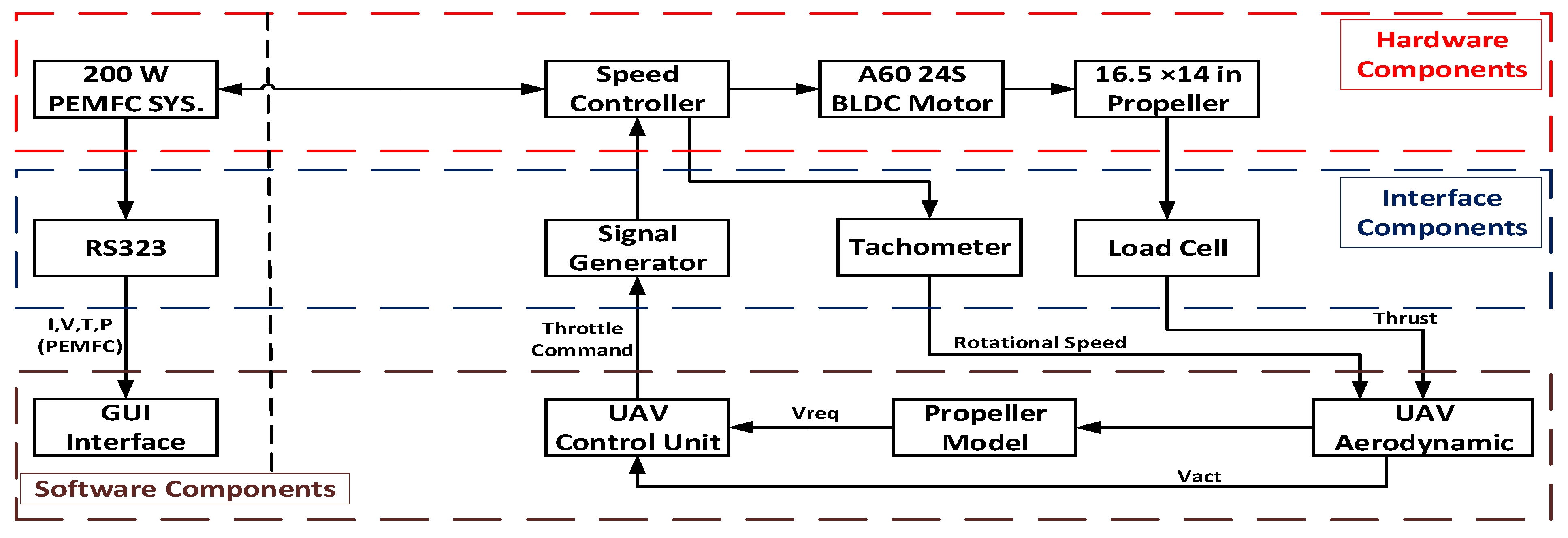
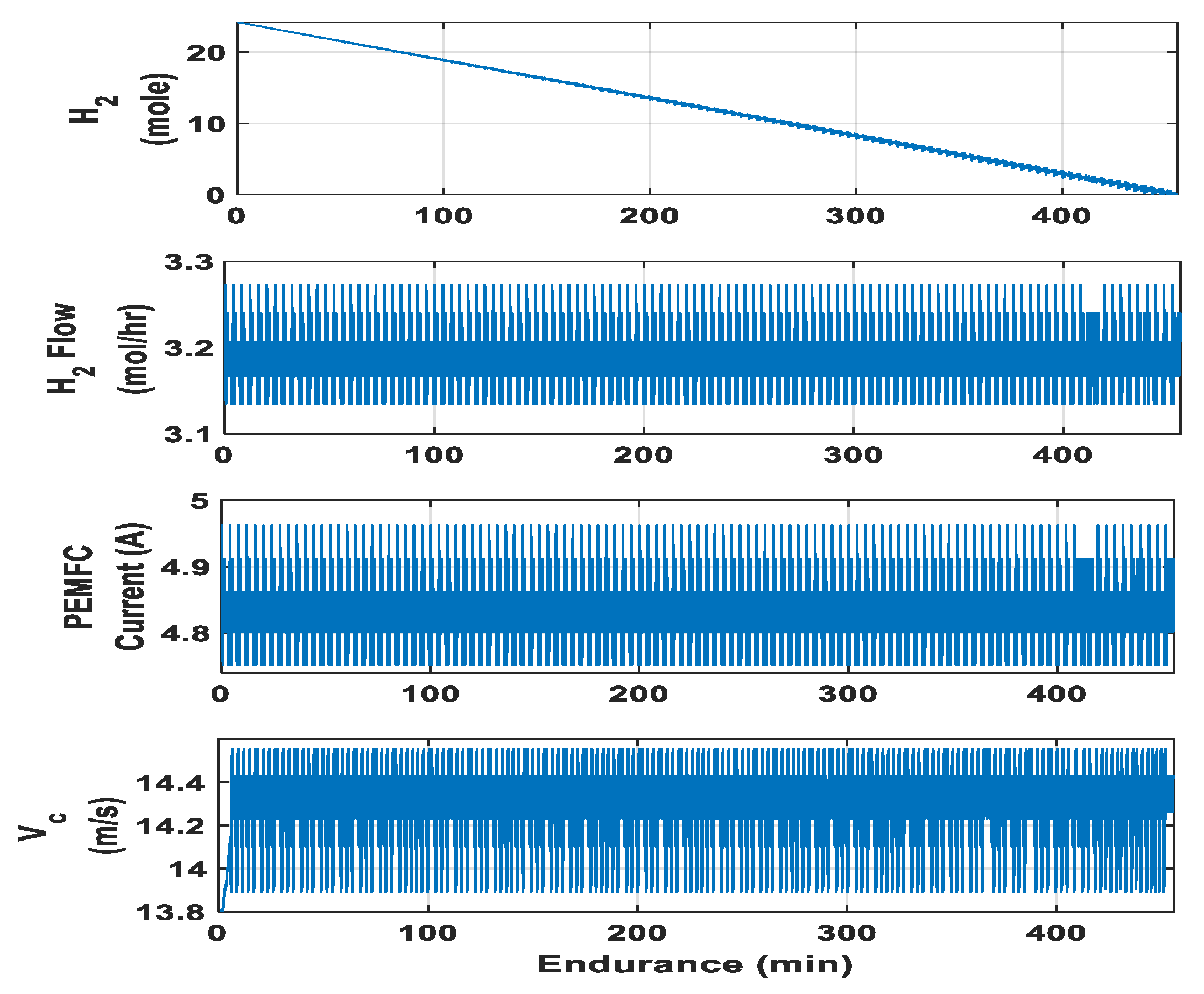
The design tool results were verified using a wind tunnel experimental setup and HiL simulation tests. The setup was developed in which it simulated the real flying conditions in terms of air speed velocity, temperature and ambient pressure. The result error margin was less than 10% showing the optimization results and experimental results were consistent. Further work will include real time flight tests for the aircraft to validate the aerodynamic models.
The measured endurance was 458.7 min as compared with 475.3 min obtained from the optimization results. The associated error percentage is about 3.62% which is considered to be very acceptable for this type of work.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}