
Effect of Symmetrically Switched Rectifier Topologies on the Frequency Regulation of Standalone Micro-Hydro Power Plants


Abstract
:1. Introduction
2. Modeling the Frequency Regulation Loop
2.1. Hydraulic Turbine
2.2. Alternator Mechanical Part
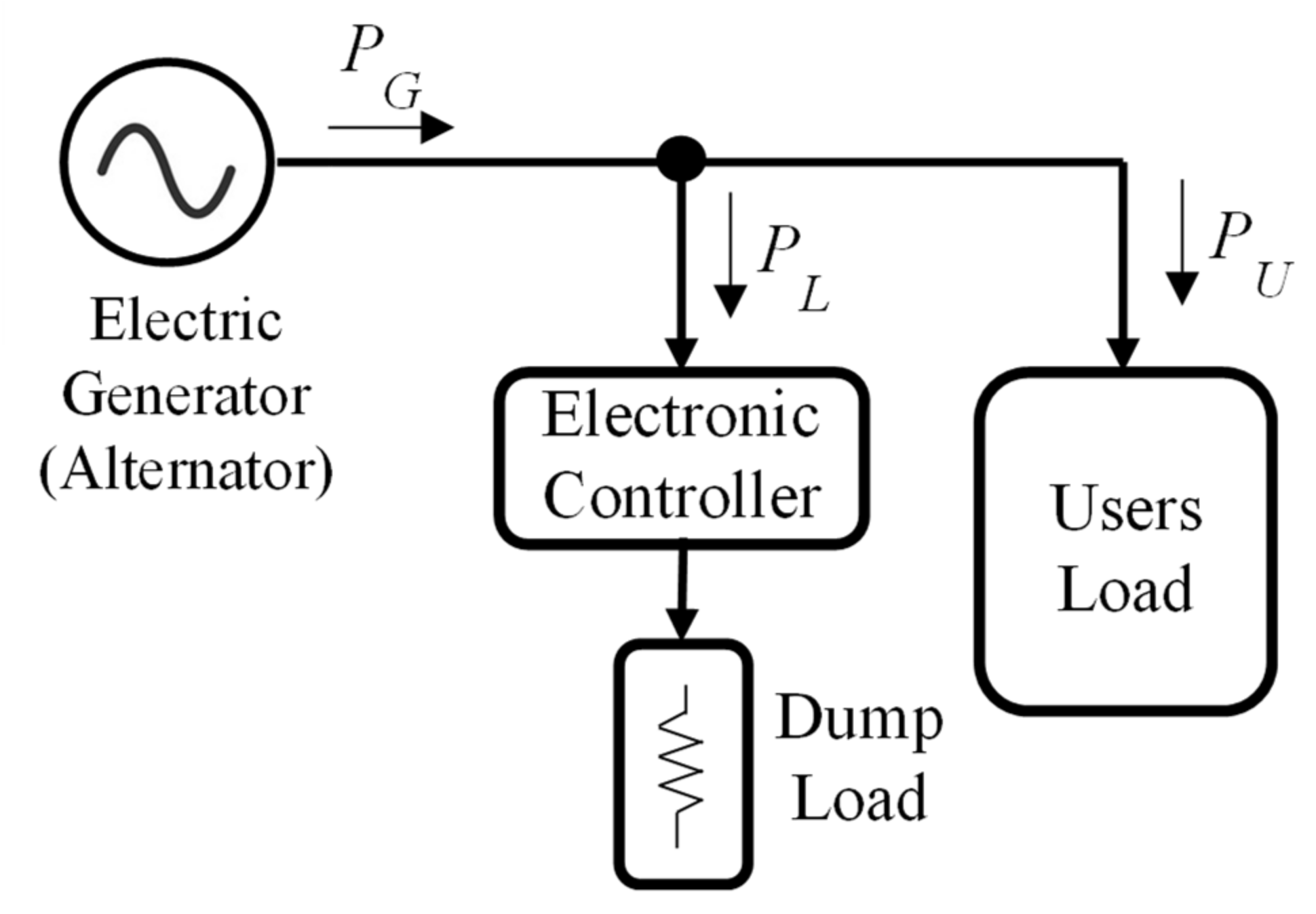
2.3. User Load
2.4. Mathematical Model of the Converter Topologies Being Studied
3. Scheme Implemented in MATLAB/Simulink®
- The hydraulic turbine (prime mover), defined by Equation (1). Its inputs are volumetric water flow, the temperature and the position of the on/off valve. Its output is the mechanical power delivered by the turbine.
- The regulating frequency loop which is designed in deviation variable. It is built using the following blocks: Constant Set Point, whose value is cero to fix zero deviation around of the nominal frequency; Gcf(s), which represents the proportional integral (PI) frequency regulator with proportional gain Kprf and integral gain Kirf parameters; Alternator Mechanical Part Model, which represents the alternator mechanical model and whose mathematical expression is (7) relating ΔPM, ΔPU and ΔPL with ΔF; and Krf that represent the gain of the frequency measurement device. The blocks From and Goto allow the signal interchange between different blocks of this scheme.
- The three-phase programmable voltage source, which represents the electric part of the alternator. It is used to feed both the user load and the converter.
- The user load, which represents the user’s load where are implemented different user consumption conditions employing the three-phase series load as physical component model.
- The converters, which is implemented using one of the topologies of converter as physical component model in order to simulate the converter under analysis. Its inputs are each one of the three phases, the Enable signal and the signal control sent by Gcf(s).
4. Evaluation of the Frequency Regulation Loop
- Rated power of the hydraulic turbine: 12.0 kW.
- Alternator voltage and frequency: 110 V RMS, 60 Hz.
- Rated speed: 1200 rpm.
- Number of poles: 6.
- Coefficient of friction by windage: 0.0063 N⋅m⋅s/rad.
- Turbine and alternator moment of inertia: 7.60 kg⋅m2.
4.1. Test Results with AC-AC Converters As Electronic Load Controllers
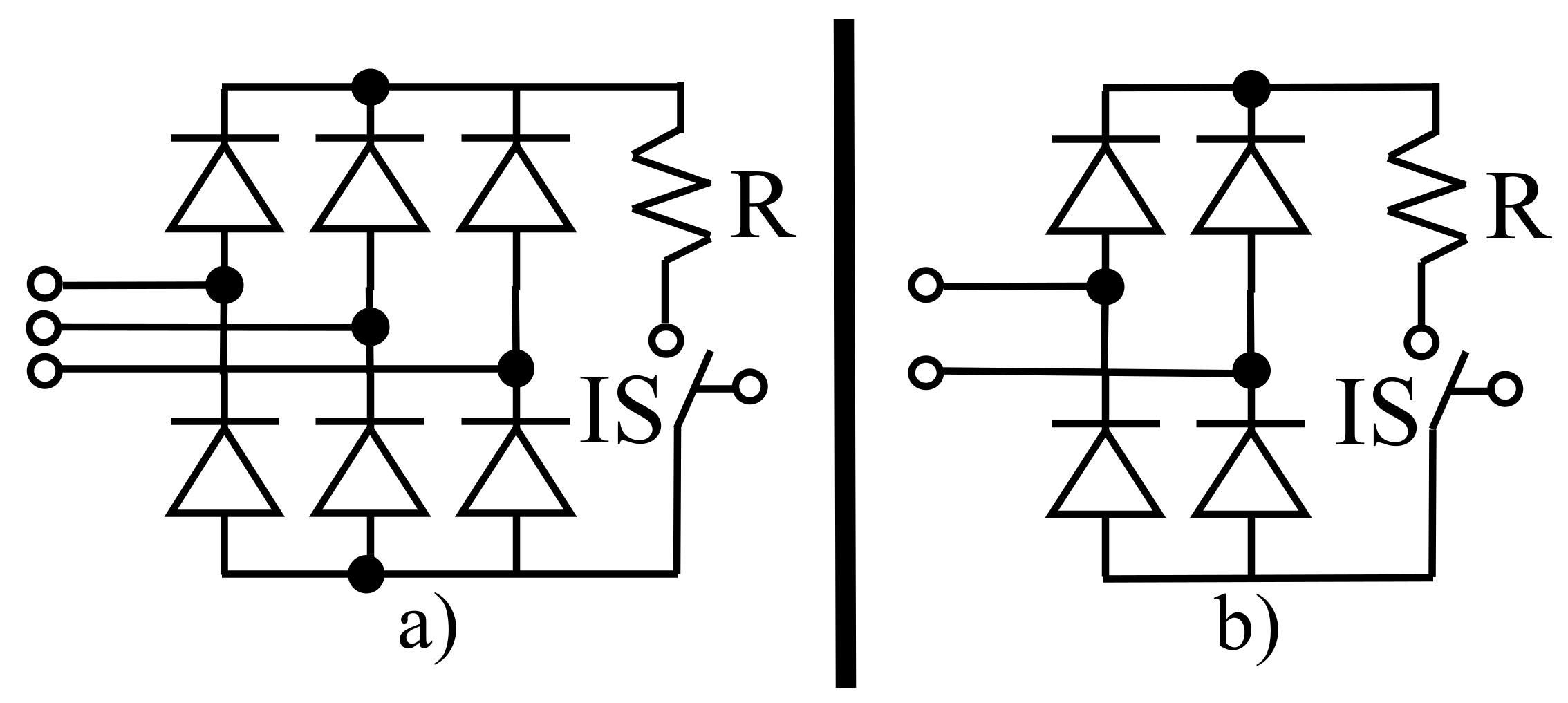
4.2. Test Results with the Three-Phase Rectifier with Symmetrical Switching as Electronic Load Controllers
4.3. Test Results with the Set of Three Single-Phase Rectifiers with Symmetrical Switching as the Electronic Load Controller
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Hydropower Association. 2018 Hydropower Status Report. Sector Trends and Insights. Available online: https://hydropower-assets.s3.eu-west-2.amazonaws.com/publications-docs/iha_2018_hydropower_status_report_4.pdf (accessed on 26 April 2021).
- Yah, N.F.; Oumer, A.N.; Idris, M.S. Small scale hydro-power as a source of renewable energy in Malaysia: A review. Renew. Sustain. Energy Rev. 2017, 72, 228–239. [Google Scholar] [CrossRef] [Green Version]
- Anaza, S.O.; Abdulazeez, M.S.; Yisah, Y.A.; Yusuf, Y.O.; Salawu, B.U.; Momoh, S.U. Micro Hydro-Electric Energy Generation—An Overview. Am. J. Eng. Res. (AJER) 2017, 6, 5–12. [Google Scholar]
- Tkáč, Š. Hydro power plants, an overview of the current types and technology. SSP J. Civ. Eng. 2018, 13, 115–126. [Google Scholar] [CrossRef]
- Bory, H.; Vazquez, L.; Martínez, H.; Majanne, Y. Symmetrical angle switched single-phase and three-phase rectifiers: Application to micro hydro power plants. IFAC-PapersOnLine 2019, 52, 216–221. [Google Scholar] [CrossRef]
- Gasore, G.; Ahlborg, H.; Ntagwirumugara, E.; Zimmerle, D. Progress for On-Grid Renewable Energy Systems: Identification of Sustainability Factors for Small-Scale Hydropower in Rwanda. Energies 2021, 14, 826. [Google Scholar] [CrossRef]
- Mehta, D.B.; Adkins, B. Transient torque and load angle of a synchronous generator following several types of system disturbance. Proc. IEE Part A Power Eng. 1960, 107, 61–74. [Google Scholar] [CrossRef]
- Singh, R.R.; Kumar, B.A.; Shruthi, D.; Panda, R.; Raj, C.T. Review and experimental illustrations of electronic load controller used in standalone Micro-Hydro generating plants. Eng. Sci. Technol. Int. J. 2018, 21, 886–900. [Google Scholar] [CrossRef]
- Kamble, S.V.; Akolkar, S.M. Load frequency control of micro hydro power plant using fuzzy logic controller. In Proceedings of the International Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI), Chennai, India, 21–22 September 2017; pp. 1783–1787. [Google Scholar] [CrossRef]
- Singh, R.R.; Chelliah, T.R.; Agarwal, P. Power electronics in hydro electric energy systems—A review. Renew. Sustain. Energy Rev. 2014, 32, 944–959. [Google Scholar] [CrossRef]
- Colak, I.; Kabalci, E.; Fulli, G.; Lazarou, S. A survey on the contributions of power electronics to smart grid systems. Renew. Sustain. Energy Rev. 2015, 47, 562–579. [Google Scholar] [CrossRef]
- Anwer, N.; Siddiqui, A.S.; Anees, A.S. A lossless switching technique for smart grid applications. Int. J. Electr. Power Energy Syst. 2013, 49, 213–220. [Google Scholar] [CrossRef]
- Wu, D.; Tang, F.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Autonomous active power control for islanded AC microgrids with photovoltaic generation and energy storage system. IEEE Trans. Energy Convers. 2014, 29, 882–892. [Google Scholar] [CrossRef] [Green Version]
- EL Yakine, N.; Menaa, K.; Tehrani, K.; Boudour, M. Optimal tuning for load frequency control using ant lion algorithm in multi-area interconnected power system. Intell. Autom. Soft Comput. 2019, 25, 279–294. [Google Scholar] [CrossRef]
- Kazerani, M.; Tehrani, K. Grid of Hybrid AC/DC Microgrids: A New Paradigm for Smart City of Tomorrow. In Proceedings of the 2020 IEEE 15th International Conference of System of Systems Engineering (SoSE), Budapest, Hungary, 2–4 June 2020; pp. 175–180. [Google Scholar] [CrossRef]
- Rai, S.K.; Rahi, O.P.; Kumar, S. Implementation of electronic load controller for control of micro hydro power plant. In Proceedings of the 2015 International Conference on Energy Economics and Environment (ICEEE), Greater Noida, India, 27–28 March 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Chan, J.; Lubitz, W. Electronic load controller (ELC) design and simulation for remote rural communities: A powerhouse ELC compatible with household distributed-ELCs in Nepal. In Proceedings of the 2016 IEEE Global Humanitarian Technology Conference (GHTC), Seattle, WA, USA, 13–16 October 2016; pp. 360–367. [Google Scholar] [CrossRef]
- Kusakana, K. A survey of innovative technologies increasing the viability of micro-hydropower as a cost effective rural electrification option in South Africa. Renew. Sustain. Energy Rev. 2014, 37, 370–379. [Google Scholar] [CrossRef]
- Ofosu, R.A.; Kaberere, K.K.; Nderu, J.N.; Kamau, S.I. Design of BFA-optimized fuzzy electronic load controller for micro hydro power plants. Energy Sustain. Dev. 2019, 51, 13–20. [Google Scholar] [CrossRef]
- Bhattarai, R.; Adhikari, R.; Tamrakar, I. Improved Electronic Load Controller for three phase isolated micro-hydro generator. In Proceedings of the 5th International Conference on Power and Energy Systems, Kathmandu, Nepal, 28–30 October 2013; Available online: https://www.researchgate.net/publication/303190135_Improved_Electronic_Load_Controller_for_Three_Phase_Isolated_Micro-Hydro_Generator (accessed on 26 April 2021).
- Salhi, I.; Doubabi, S.; Essounbouli, N.; Hamzaoui, A. Frequency regulation for large load variations on micro-hydro power plants with real-time implementation. Int. J. Electr. Power Energy Syst. 2014, 60, 6–13. [Google Scholar] [CrossRef]
- Singh, P.D.; Sharma, A.; Gao, S. PWM based AC-DC-AC converter for an isolated hydro power generation with variable turbine input. In Proceedings of the ICEPE, Shillong, India, 1–2 June 2018. [Google Scholar] [CrossRef]
- Singh, P.D.; Gao, S. An isolated hydro power generation using parallel asynchronous generators at variable turbine inputs using AC-DC-AC converter. In Proceedings of the IICPE, Jaipur, India, 13–15 December 2018. [Google Scholar] [CrossRef]
- Riaz, M.H.; Yousaf, M.K.; Izhar, T.; Kamal, T.; Danish, M.; Razzaq, A.; Qasmi, M.H. Micro hydro power plant dummy load controller. In Proceedings of the 2018 1st International Conference on Power, Energy and Smart Grid (ICPESG), Mirpur Azad Kashmir, Pakistan, 12–13 April 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Murthy, S.S.; Hegde, S. 5.-Hydroelectricity. In Electric Renewable Energy Systems; Rashid, M.H., Ed.; Academic Press: London, UK, 2016; pp. 79–81. [Google Scholar]
- Traxler-Samek, G.; Lugand, T.; Schwery, A. Additional Losses in the Damper Winding of Large Hydrogenerators at Open-Circuit and Load Conditions. IEEE Trans. Ind. Electron. 2010, 57, 154–160. [Google Scholar] [CrossRef]
- Nuzzo, S.; Bolognesi, P.; Gerada, C.; Galea, M. Simplified Damper Cage Circuital Model and Fast Analytical–Numerical Approach for the Analysis of Synchronous Generators. IEEE Trans. Ind. Electron. 2009, 66, 8361–8371. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill, Inc.: New York, NY, USA, 1994. [Google Scholar]
- Dewan, S.; Slemon, G.; Straughen, A. Power Semiconductor Drives; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Doolla, S. Frequency Control in Isolated Small Hydro Power Plant. Handbook of Renewable Energy Technology; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2011; Chapter 20. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Topology | Device | Quantity | Unit Price (€) | Total Cost (€) 1 |
|---|---|---|---|---|
| AC-AC Converter | Thyristor SKT 55/04 D | 6 | 25.65 | 153.90 |
| R 4 kW | 3 | 9.65 | 28.95 | |
| Total | 182.85 | |||
| Three-phase rectifier with symmetrical switching | Rectifier SQL40A | 1 | 10.27 | 10,27 |
| IGBT SKM400GAL12 | 1 | 44.25 | 44.25 | |
| R 12kW | 1 | 11.50 | 11.50 | |
| Total | 66.02 | |||
| Single phase rectifier with symmetrical switching | Rectifier FB5006 | 3 | 1.82 | 5.46 |
| IGBT SKM400GAL12 | 3 | 44.25 | 132.75 | |
| R 4 kW | 3 | 9.65 | 28.95 | |
| Total | 167.16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bory, H.; Martin, J.L.; Martinez de Alegria, I.; Vazquez, L. Effect of Symmetrically Switched Rectifier Topologies on the Frequency Regulation of Standalone Micro-Hydro Power Plants. Energies 2021, 14, 3201. https://doi.org/10.3390/en14113201
Bory H, Martin JL, Martinez de Alegria I, Vazquez L. Effect of Symmetrically Switched Rectifier Topologies on the Frequency Regulation of Standalone Micro-Hydro Power Plants. Energies. 2021; 14(11):3201. https://doi.org/10.3390/en14113201
Chicago/Turabian StyleBory, Henry, Jose L. Martin, Iñigo Martinez de Alegria, and Luis Vazquez. 2021. "Effect of Symmetrically Switched Rectifier Topologies on the Frequency Regulation of Standalone Micro-Hydro Power Plants" Energies 14, no. 11: 3201. https://doi.org/10.3390/en14113201