1. Introduction
In accordance with the ever growing energy demands, together with the depletion and combustion problems of fossil fuels, renewable energy sources, especially large offshore wind farms have gained maybe the most significant place in future energy systems. Since 2002, when the modular multilevel converter (MMC) was proposed [
1], it is recognized as the most attractive solution for HVDC transmission systems of offshore wind farms but also in other HVDC applications, as well as in industry. In the last two decades, intense research work was invested in MMCs and systematized in several recently published review papers, such as [
2,
3,
4,
5]. The authors of [
3] have presented the state of the art of MMCs regarding topologies, modeling and control methods, modulation techniques and applications. The authors of [
2] have additionally discussed power losses considering the wide-bandgap (WBG) technology application. A review of operation and control methods for MMCs in unbalanced AC grids is provided in [
4], while [
5] presents the state of the art in model predictive control of high power MMCs. Considering AC-to-AC applications, the state of the art in relatively new power converter topology—modular multilevel matrix converters has been discussed regarding implementation issues and applications [
6]. As stated in listed literature, the MMC is the preferable topology for high power and medium/high voltage energy conversion systems, because it offers modularity, voltage and current scalability, high efficiency with transformer—less operation, redundancy at low expenses and reduced output current ripple. Consequently, the filter size is reduced, but because of their complexity, MMCs are challenging from the control standpoint.
There are many control objectives that need to be met for the converter to operate properly, including AC current, circulating current and energy balancing between the submodules [
7,
8]. In addition, circuit parameters need to be defined and optimally chosen [
9,
10,
11]. Throughout the years, various approaches for MMC control have been reported and can be mainly classified as classical methods and model predictive control (MPC) methods according to [
3]. While the operation and performance of a MMC with applied Classical Control depends on the modulation method, switching frequency and proportional-integral (PI) control design and tuning, the application of MPC methods offers to overcome the limitations of Classical Control by attaining numerous control objectives with a single cost function [
3]. Likewise, the MMC as a switching converter represents a nonlinear system possessing multiple coupled variables [
2]. Therefore, the implementation of conventional (classical) methods has limitations regarding the dynamic response that can be overcome by applying nonlinear and predictive control strategies such as MPC. MPC can handle multiple constrains in a single cost function, providing fast dynamic response and high robustness regarding parameter variations and external disturbances [
2]. Besides that, there are numerous other inventions introduced in literature to overcome limitations of classical control methods among which is the application of fractional-order PID (FOPID) controllers with non-integer derivation and integration [
12,
13]. FOPID controllers provide reduced THD of the output current, reduced amplitude and phase errors by controlling the switching frequency of the output voltage, good dynamic response and excellent start-up response, but their main disadvantage is complex design and tuning compared to traditional PID controllers [
12].
For the single-phase MMC considered in the papers, there are two methods that can be applied: Optimal Voltage Level Model Predictive Control (OVL-MPC) and Optimal Switching State Model Predictive Control (OSS-MPC) [
12]. The OVL-MPC has a single cost function that regulates AC current and circulating current. It generates an optimal number of submodules in the arm that need to be “inserted”, and based on that information voltage (energy) balancing block determines exactly which submodules are going to be “inserted” [
12,
14]. OSS-MPC also uses a single cost function, but voltage balancing is integrated into the function. Therefore, OSS-MPC is a more precise method compared to OVL-MPC, but also more computationally complex.
In order to maintain the good characteristics of MPC methods while reducing computational complexity, there are several methods which combine MPC with Classical Control and other control mechanisms. Implementation of Neural Network based MPC is presented in [
15]. Combination of Nearest Level Control (NLC) and MPC is described in [
16], while the impact of submodules grouping on MMC performance is analyzed in [
17]. Merging of Classical Control and MPC into deadbeat control is presented in [
18]. The MPC method that has the ability to determine online optimal trajectory for the single-phase MMC is presented in [
19].
There is a notable lack of literature regarding the fair quantitative comparison between MPC and classical MMC control, in addition to listed qualitative differences, which this paper aims to fill. It is necessary to define adequate criteria for determining the improvement in MMC performance obtained by introducing MPC-based control algorithms compared to Classical Control. This paper is focused on conducting this comparison, thereby facilitating the choice of a control methods combination which results in the best performance of single-phase MMCs.
In this paper, Classical Control and OSS-MPC are designed and evaluated. Based on evaluation results, these methods are compared. For the purposes of analysis conducted in the paper, implementations of Classical Control and OSS-MPC methods for a single-phase MMC are evaluated using Typhoon’s Virtual Hardware-in-the-Loop (V-HIL). In both cases controllers and single-phase MMC are modeled in V-HIL that represents a useful tool to evaluate converter operation and to test control performance prior to converter design and assembly. Owing to the working principle of V-HIL, each model can contain a certain number of switches. V-HIL 402, supporting up to 12 switching modules, is used in the research presented in the paper. In the case of a greater number of submodules per arm, would need to be arms are modeled by an equivalent circuit. The disadvantage of such a modeling approach is that it is impossible to access and control individual submodules. Therefore, a single-phase MMC with six submodules per arm is analyzed and evaluated in the paper. Both control methods are based on precisely defined mathematical models, which helps determine the optimal number and values of control parameters [
7,
8].
An overview of single-phase MMCs with mathematical model description and circuit parameter setting is given in
Section 2.
Section 3 is dedicated to Classical Control analysis. Control mechanisms of OSS-MPC are analyzed in
Section 4. Evaluation and comparison of these methods are located in
Section 5. Finally, the conclusions are derived in
Section 6.
2. MMC Overview
Mathematical model of the selected single-phase MMC topology is derived in this section, based on which control objectives are defined. In addition, the procedure for submodule capacitance and arm inductance selection is described and performed, in order to ensure appropriate operation of MMC.
2.1. Topology
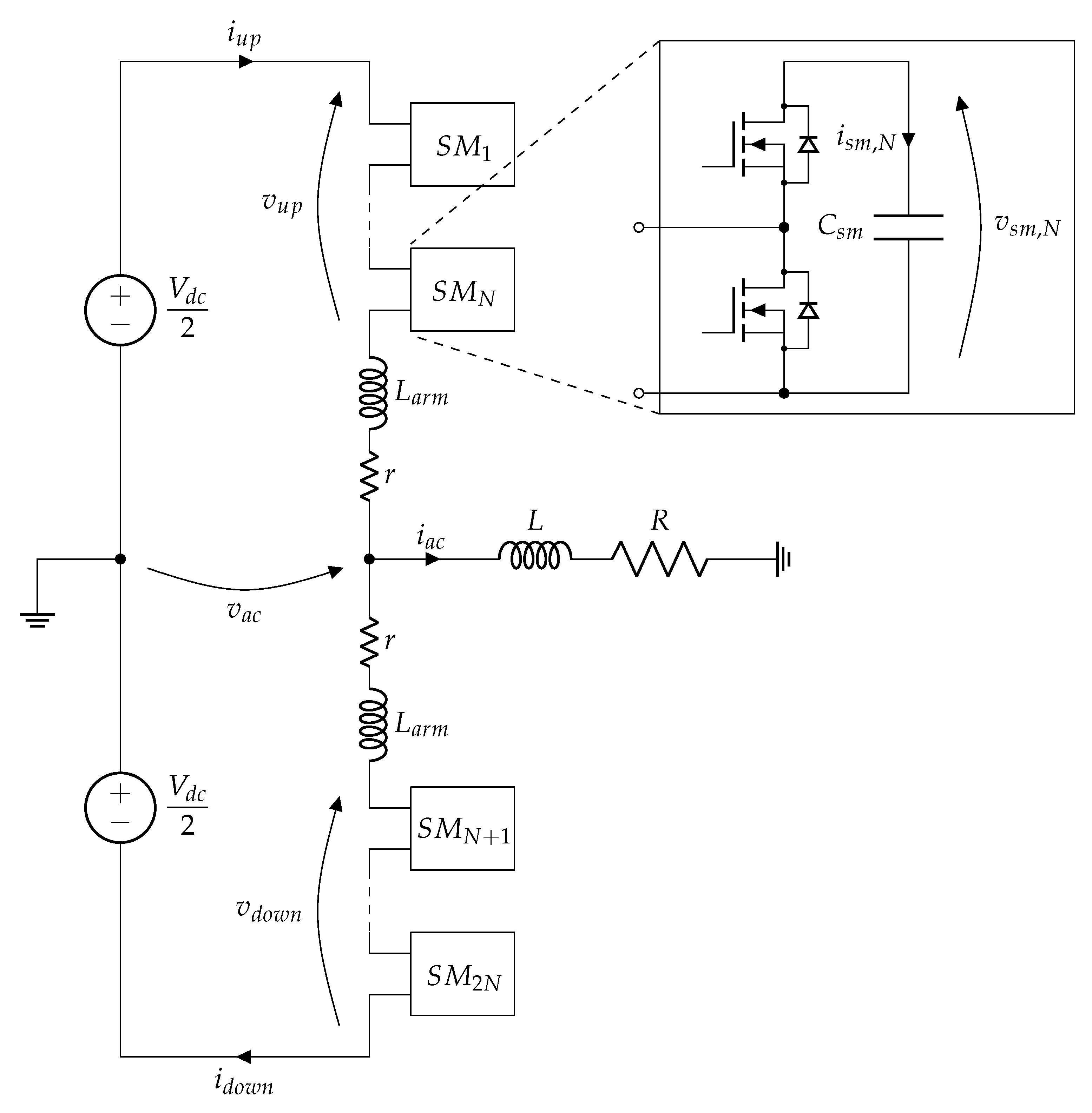
Single-phase MMC topology is presented in
Figure 1. This converter consists of one leg and the leg is composed of two arms. In the middle of the arm is the AC terminal, connected to
load. Each arm consists of
N submodules. There are different variants for submodule topology, such as Half-Bridge, Full-Bridge, etc. [
7]. Due to the limited model complexity allowed by the applied HIL device, i.e., the maximum number of switches per circuit, the Half-Bridge topology is chosen for the submodules, as shown in
Figure 1.
The Half-Bridge submodule consists of a single capacitor in parallel with two switches. These switches have complementary control logic; when the upper switch is on, the lower switch is turned off, and vice versa. When the upper switch is on, the voltage between terminals of the submodule is equal to the capacitor voltage, and the capacitor is exposed to the arm current. When the lower switch is on, the submodule terminals are shorted and there is no current flowing through the capacitor. Therefore, it can be concluded that the capacitor voltage will increase if the arm current is positive and decrease if the arm current is negative when the upper submodule switch is turned on. When the lower submodule switch is turned on, the capacitor voltage does not change.
The number of “inserted” submodules (submodules with upper switch turned on) determines the arm voltage. The sum of arm voltages determines DC voltage of the leg, whereas their difference “generates” the voltage at the AC terminal.
2.2. Mathematical Model
According to single-phase MMC topology presented in
Figure 1, it can be concluded that voltages
and
are equal to:
The half-sum of arm currents determines the circulating current
:
whereas the difference between these two currents is equal to the AC current
:
From (
3) and (
4), upper and lower arm currents
and
can be expressed as:
By combining (
5) and (
6) with (
1) and (
2), (
7) and (
8) can be obtained:
The half-difference of
and
, which is basically the arm voltage component that generates voltage at the AC terminal, can be obtained by subtracting (
7) from (
8):
AC load voltage
is also equal to:
By combining the previous two equations, the following expression for arm voltages half-difference
is derived:
AC voltage references for upper and lower arm voltages
and
have the same values, but are of opposite sign:
where
is AC current reference. On the other hand, leg voltage
is obtained by adding (
8) to (
7):
Arm voltages can be decoupled in the same way as arm currents:
The DC arm voltage reference
consists of half the value of DC-link voltage
and compensating voltage
:
Compensating voltage
controls the circulating current
:
Finally, reference voltages for upper and lower arm are given by the following two equations:
When (
12) and (
17) are combined with (
18)–(
21) are obtained:
If AC current is required to be a sine function:
then (
20) and (
21) can be modified to obtain (
23) and (
24):
where
Z is equal to:
while
is equal to:
It should be noted that the product
must be smaller then the half of the DC link voltage. If it is assumed that circulating current has no AC component and that the number of submodules and switching frequency have no effect on upper and lower arm voltages, then upper and lower arm voltage equations can be written as:
where
is DC value of circulating current
. Arm currents can be expressed as:
Consequently, instantaneous upper arm power is defined as:
The average value of
corresponds to active power in upper submodules:
Knowing that
is equal to zero in steady-state, one can calculate the circulating current reference as in (
33):
2.3. Control Objectives
There are three control objectives that are considered in this paper: AC current control, voltage balancing control and circulating current control. In order to tune the controller properly, appropriate MMC state-space models will be defined. It is also necessary to define the discrete form of state-space model equations to allow MPC implementation. Forward Euler approximation is used for converting continuous-time model to discrete-time model.
2.3.1. AC Current Control
The differential equation that describes AC current behavior is given as:
The discrete form of the previous equation is given as:
where parameters
and
are equal to:
and
is the sampling period.
2.3.2. Circulating Current Control
The circulating current differential equation in continuous form is given as:
The discrete form of the previous equation is given as:
where parameters
and
are equal to:
2.3.3. Submodule Capacitor Voltage Control
The differential equation that describes the submodule capacitor voltages is given by (
42):
where
N is the number of submodules per arm,
is the submodule capacitance and
is the capacitor voltage corresponding to the
j-th submodule. The discrete form of the previous equation is given as:
2.4. Parameter Settings
Initial parameters of single-phase MMC are presented in
Table 1. Based on these parameters, the submodule capacitance, arm inductance and arm resistance can be selected.
2.5. Submodule Capacitance Selection
Submodule capacitors store the energy within the arm. Equivalent capacitance of one arm is
, whereas the sum of capacitor voltages within the arm is equal to the DC link voltage. If capacitor voltage ripple is neglected, energy stored within the submodules of the observed arm can be calculated as:
However, energy fluctuation must be taken into consideration. In fact, the ripple of the voltage across capacitor
is proportional to the square root of energy fluctuation and reversely proportional to capacitance
. Submodule capacitance is chosen according to the voltage ripple requirement [
9,
20]. Energy fluctuation of the upper arm is obtained by integrating the AC component of instantaneous power given by (
31) and adding it to (
44), leading to (
45):
where
is given by:
and
is calculated as:
Assuming an even distribution of energy across the arm, the following holds:
where
is the voltage of a single submodule. By equalizing (
45) and (
48), submodule capacitor voltage
is obtained:
Minimal submodule voltage is equal to:
while maximal submodule voltage is equal to:
where
and
are minimum and maximum of
function. If the submodule voltage variations are limited to
of
reference value, i.e., if the submodule voltage can vary between
and
, submodule capacitance is calculated to be no lower than 9.2 mF. The value of 10 mF is selected for the submodule capacitance
.
2.6. Arm Inductance Selection
The value of arm inductance influences the harmonic content of circulating current. Namely, by increasing the arm inductance, the circulating current harmonics are decreased. The problem regarding circulating currents in single-phase MMC circuit is that only the DC component has a purpose in active power transfer from DC terminal to AC terminal. Apart from the DC component, second-order harmonic is also present due to imbalance across the leg. This component increases the losses, which is why it should be attenuated.
Arm inductance is selected based on analysis conducted in literature [
21]. The choice is guided by two conditions: avoiding resonant frequency and attenuation of circulating current second order harmonic amplitude.
2.6.1. Resonant Frequency
According to [
10], the circulating current contains harmonics at frequency
, where
n is the order of the harmonic, and
is the fundamental frequency of the AC circuit. Any higher-order harmonic can cause resonance if
is selected so that the following holds [
10]:
where
is modulation index. To avoid resonance for all higher order harmonics, it is desirable to operate the converter at
. Maximal resonance frequency occurs when
and
, which imposes the following condition:
where
is set to 100
rad/s. With
already selected, it is concluded that arm inductance has to be
mH.
2.6.2. Circulating Current Second Order Harmonic Amplitude
Based on [
10], circulating current second order harmonic amplitude
can be estimated as:
If the modulation index
m is equal to 1, MMC generates maximal AC power, and in that case circulating current DC component is
A. If condition
is introduced and the resistance
r is neglected in (
54), the minimal required value of
is determined to be 5 mH. Based on available data for commercial inductors with current rating of 30 A and inductance greater than 5 mH, it was found that parasitic resistance of such inductor ranges from 45 to 130 mΩ. The arm inductance and resistance are therefore set to 5 mH and 100 mΩ, respectively. When these values are included in (
54), condition
is still satisfied.
Based on the calculations performed in this section, all MMC parameters have been determined. The complete list of parameters with their values is presented in
Table 2.
4. OSS-MPC
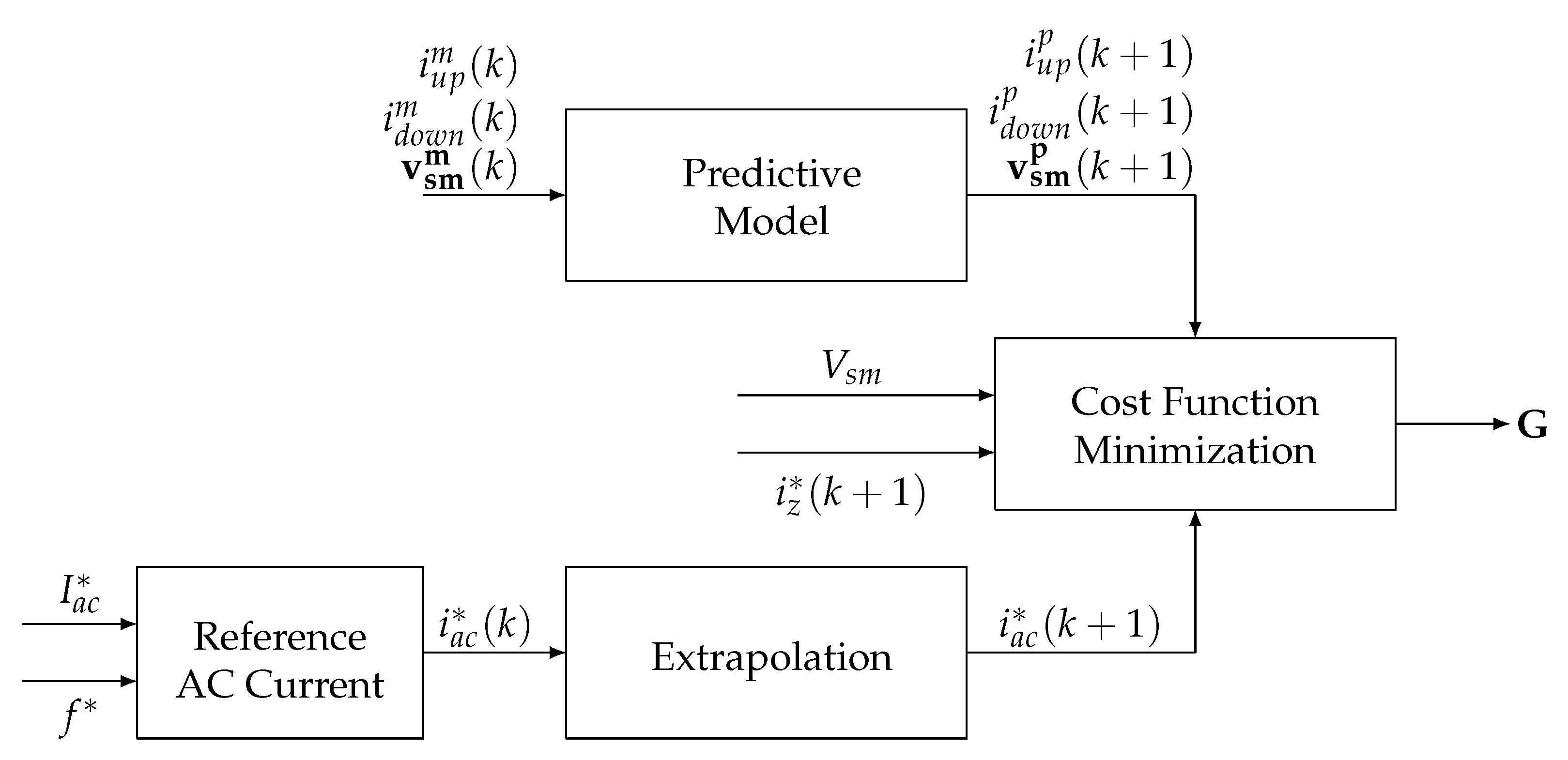
A block diagram of OSS-MPC method for the MMC is shown in
Figure 5. This method is based on a single cost function for two scalars, AC current and circulating current, and one set of variables with
elements: submodule capacitor voltages. Due to the use of a single cost function, this method is more computationally complex but more precise when compared to the Optimal Voltage Level Model Predictive Method (OVL-MPC), a method also used for control of single-phase MMC [
5].
The upper and lower arm currents,
and
, and submodule capacitor voltages
(
, array
) are measured and fed to Predictive Model block. This block is based on the following expressions:
Equations (
57)–(
59) are derived from Equations (
35), (
39) and (
43). Voltages
and
are input variables, and they depend on the switching state. Designations with
m in the exponent represent measured variables. For every switching state there is a single corresponding cost function value. Cost function is calculated as:
where
,
and
are weighting factors for AC current, circulating current and submodule voltages, respectively. Reference for AC current amplitude
determines the circulating current reference
given by Equation (
33). In this way, power balance across the MMC is established. Submodule capacitor voltage reference is set to
.
Cost function minimization block is used to find a switching state that results in the lowest cost function value. The Switching state with the lowest cost function value is obtained from the cost function minimization block and set as the next switching state .
5. Results
A single-phase MMC is modeled in Typhoon HIL schematic editor. Along with the power circuit, both Classical Control and OSS-MPC algorithms are designed in separate models. After compiling, each simulation model is loaded into HIL SCADA, in order to extract measurements. Simulation results of steady-state and dynamic performance for each method are presented and discussed in this section.
5.1. Control Parameter Selection
Control parameters for both methods are selected based on the mathematical model of single-phase MMC. For Classical Control, PI controllers are set with damping factor
to prevent overshoot. Control parameters used for Classical Control and OSS-MPC are presented in
Table 3 and
Table 4, respectively.
5.2. Steady-State
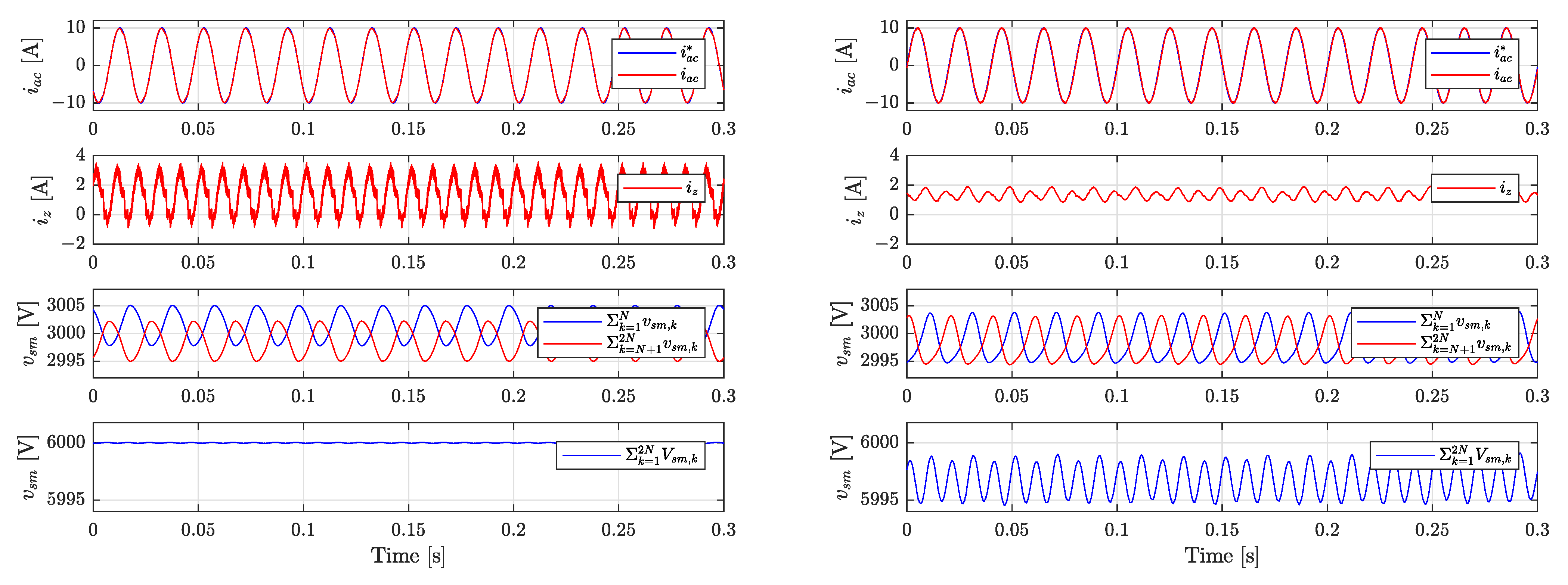
The steady-state results are shown in
Figure 6. Each figure contains four time-diagrams: (1) AC current reference and response; (2) circulating current; (3) sums of upper and lower arm submodule voltages; (4) total sum of submodule voltages. Simulation results of Classical Control are presented in four time-diagrams on the left, while OSS-MPC simulation results are presented in four time diagrams on the right.
Regarding the AC current in the steady-state, reference amplitude and frequency are set to 10 A and 50 Hz, respectively. The response tracks the reference precisely in both cases. THD factor of AC voltage for Classical Control and OSS-MPC are equal to 17.74% and 15.93%, respectively. However, THD factors of the AC current for Classical Control is %, while for OSS-MPC it equals %. These values indicate that in the case of Classical Control, AC voltage contains harmonics of lower order compared to the same voltage obtained when OSS-MPC is used.
OSS-MPC shows superior performance regarding circulating current. Average value of circulating current for both methods is around 1.335 A. However, the presence of second order harmonic is more significant in the case of the Classical Control, yielding a greater peak value of circulating current in the case of Classical Control compared to OSS-MPC.
Regarding submodule capacitor voltages, Classical Control has an advantage over OSS-MPC. In the case of Classical Control, total sum of submodule voltages is tracked almost perfectly, with very little oscillations. The maximal voltage of any of the submodules is 501.01 V, whereas the minimal is 498.95 V. In the case of OSS-MPC, there is a more significant presence of second-order harmonic in total sum of submodules voltage. In addition, the DC component is equal to V rather than the required 6000 V. For OSS-MPC, the maximal voltage of each submodule is 501.17 V, whereas the minimal is 498.46 V.
5.3. Dynamic Performance
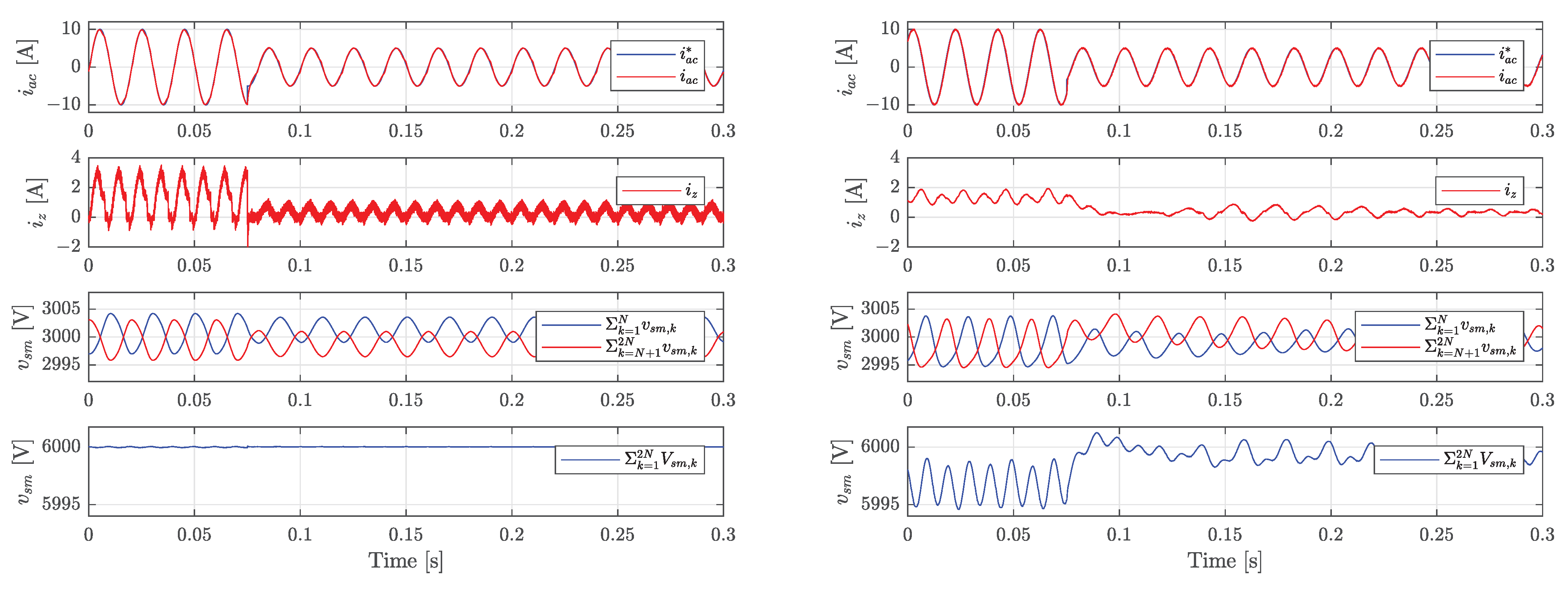
The simulation results of dynamic performance are shown in
Figure 7. Similarly to the steady-state results, each figure contains four time-diagrams: (1) AC current reference and response; (2) circulating current; (3) upper and lower arm submodule voltage sums; (4) total sum of submodule voltages. Simulation results of Classical Control are presented in four time-diagrams on the left side, while OSS-MPC simulation results are presented in time-diagrams on the right side.
The following test is performed: amplitude of AC current reference is changed from 10 A to 5 A at s. Both control mechanisms responded excellently to the disturbance, as the current continues to track the reference without overshoot or time delay.
Regarding circulating current, similarly to the steady-state operation, a smaller content of second and higher order harmonics is observed in the case of OSS-MPC. As expected, the value of DC component changes for both methods, due to the change in active and reactive power.
Concerning the submodule voltage control, OSS-MPC still has a tracking error after the disturbance, but reduced compared to the previous operating mode. For OSS-MPC, the maximal voltage of each submodule is 502.26 V, whereas the minimal voltage is 498.46 V. In the case of Classical Control, the disturbance causes no significant voltage change. For Classical Control, the maximal voltage of each submodule is 500.94 V, while the minimal voltage is 499.13 V.
Finally, a fair comparison between Classical Control and OSS-MPC Control based on the selected criteria is performed and presented in
Table 5.
6. Conclusions
Control strategies for a single-phase MMC are analyzed. Based on this analysis, the submodule capacitance and arm inductance are chosen, as well as the control parameters for two control methods: Classic Control and OSS-MPC. Firstly, an optimal set of parameters is determined for both methods, and the results of simulations performed in Typhoon’s Virtual HIL simulator are compared. This is the first time that a fair comparison is made in the literature, resulting in superior performance of both control methods regarding four different criteria and the same performance regarding AC current reference tracking. Additionally, OSS-MPC is proven to be a better method regarding circulating current which has smaller presence of non-DC components and accordingly reduced value of losses. Concerning voltage control and balancing, Classical Control regulates the sum of submodule voltages almost flawlessly, even when a disturbance is introduced. However, it is worth noting that in the cost function of OSS-MPC, individual submodules’ voltages are regulated rather than their total sum, thus inherently influencing inferior performance of the observed MPC compared to Classical Control.
The authors’ efforts were to fill the void of a fair comparison between Classical Control method and MPC for single-phase MMCs that exists in the literature. The lack of such comparison in the literature may be a consequence of three-phase MMCs being analyzed more extensively due to their preferences in applications. It is required to choose adequate criteria for comparison of Classical Control with other types of control which should introduce improvement in performance of MMC. Therefore, the analysis conducted in the paper emphasizes the significance of this comparison and contributes in indicating the best choice of control methods combination, which should result in the best performance of single-phase MMCs. The authors are planning to extend the research presented in the paper to more robust control analysis and to application of improved control algorithms on FPGA/DSP, which will initially be connected to a HIL emulating power circuit and afterwards to a single-phase MMC experimental setup.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}