
Remote Monitoring and Fault Diagnosis of Ocean Current Energy Hydraulic Transmission and Control Power Generation System



Abstract
:1. Introduction
2. Overall Design of the Remote Monitoring and Fault Diagnosis System for Hydraulic Transmission Control Power Generation
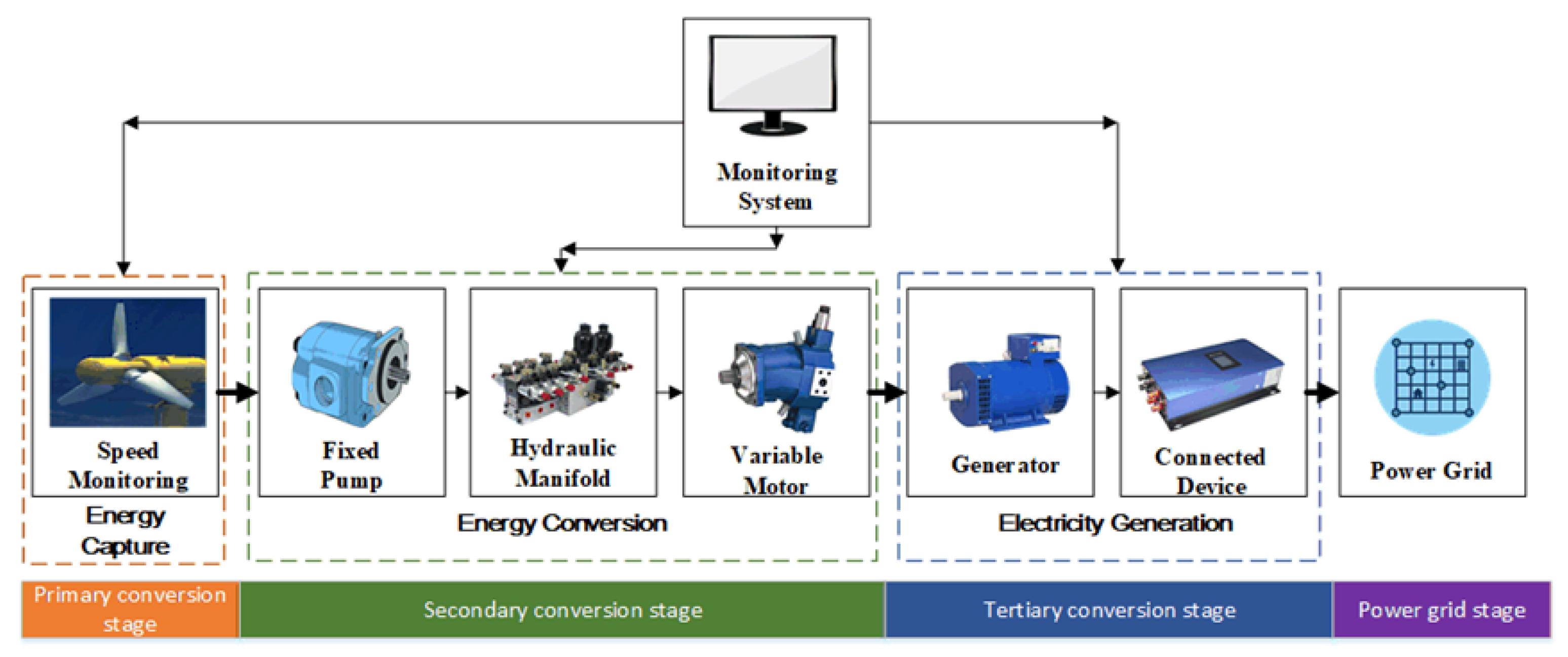
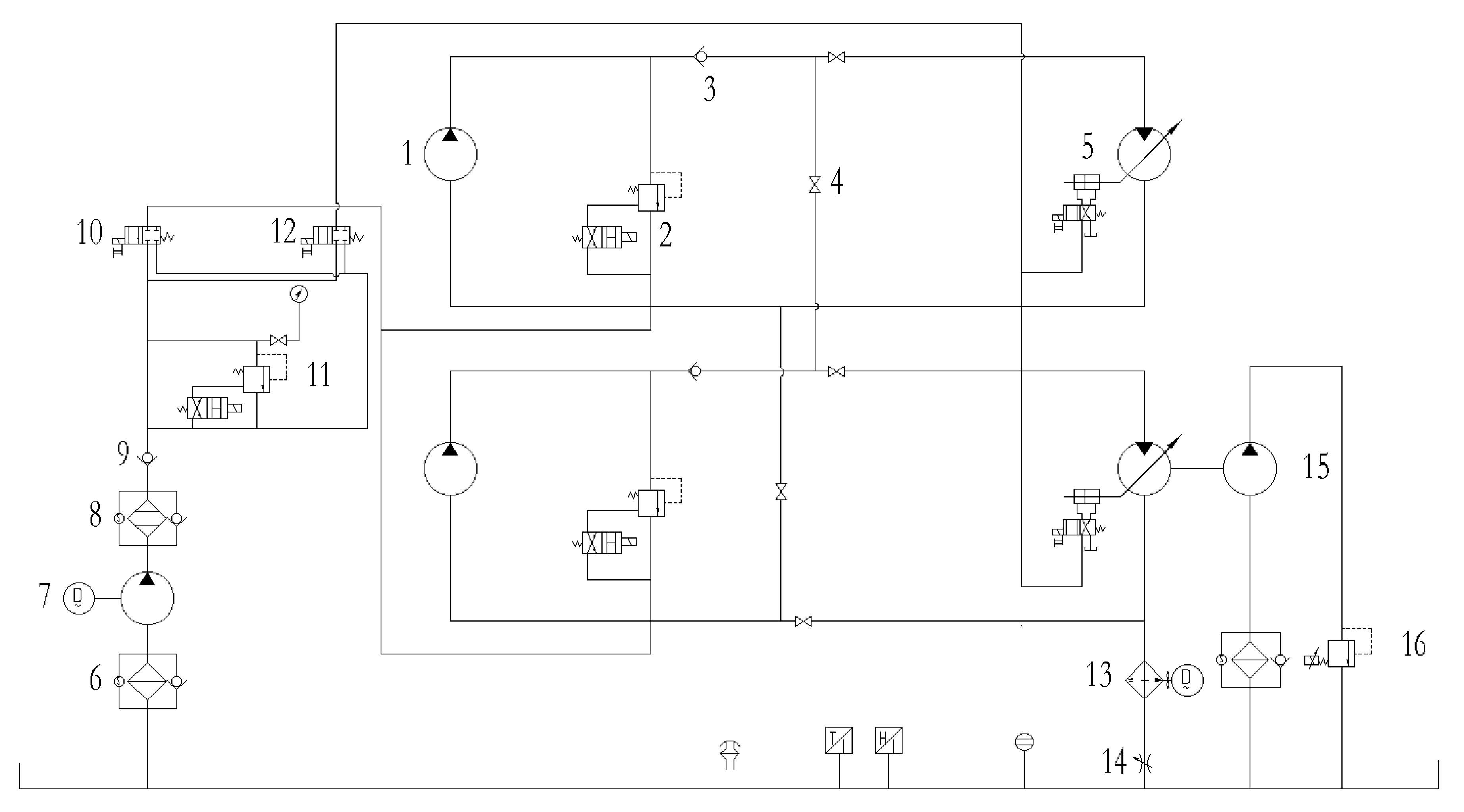
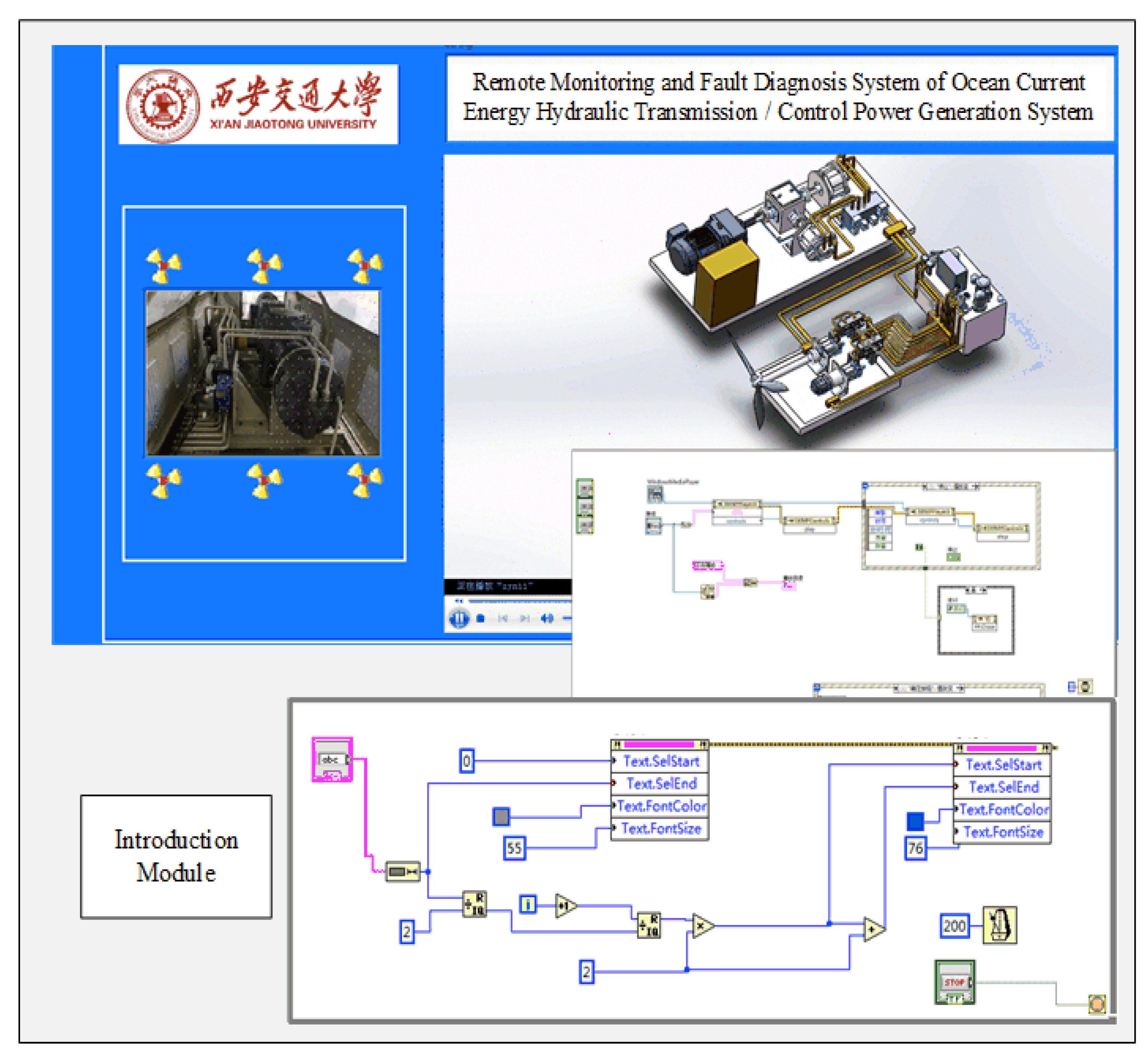
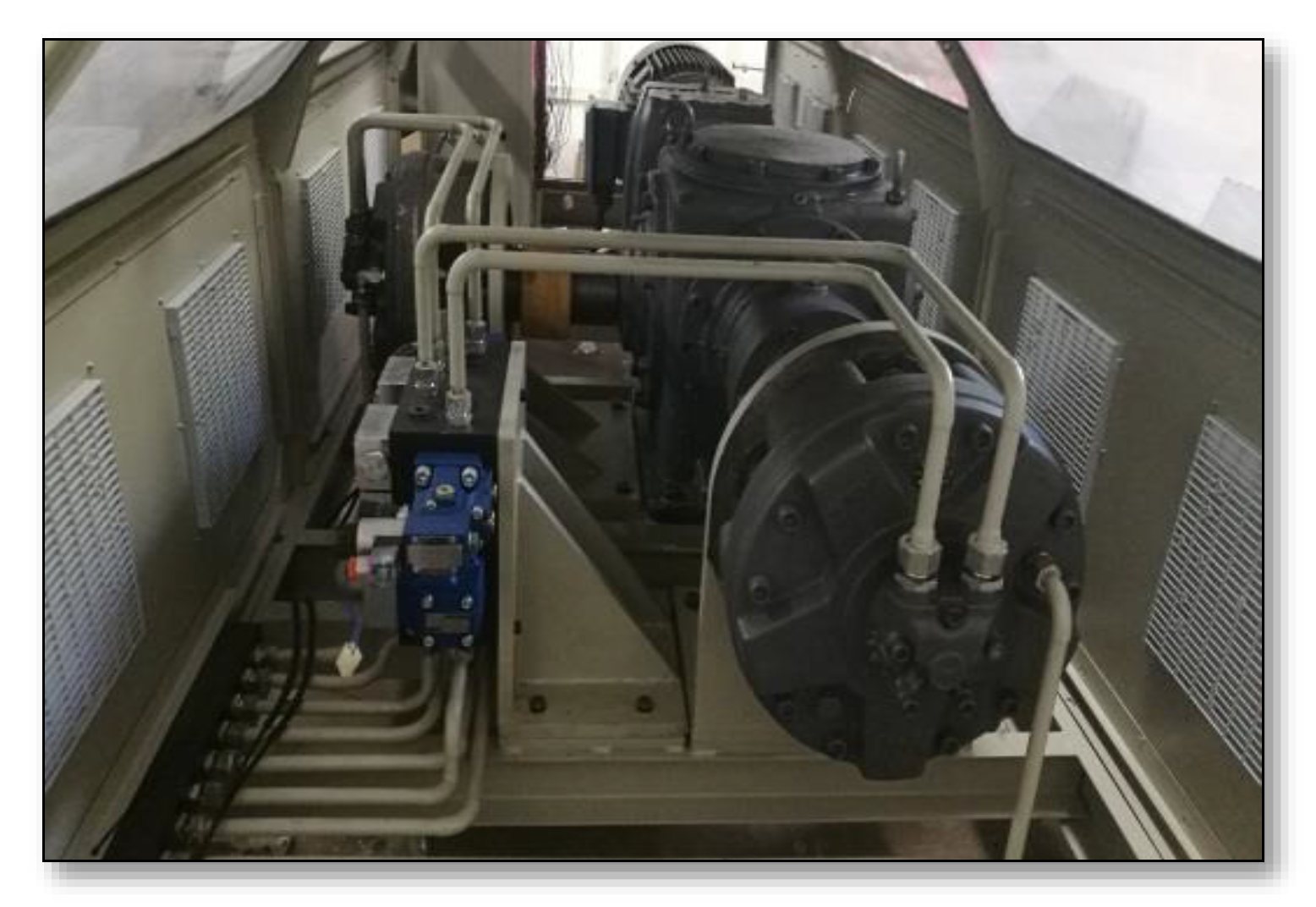
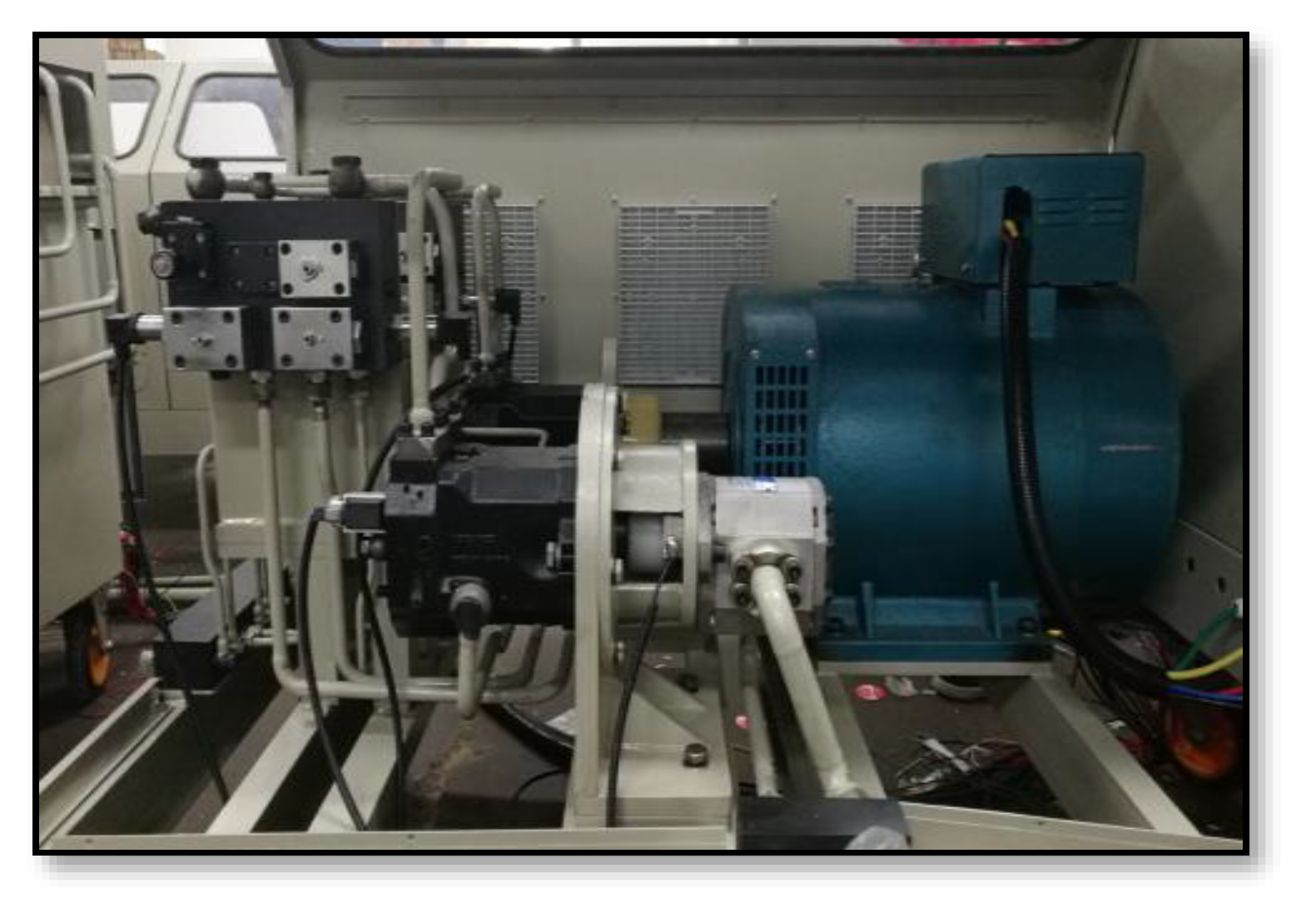
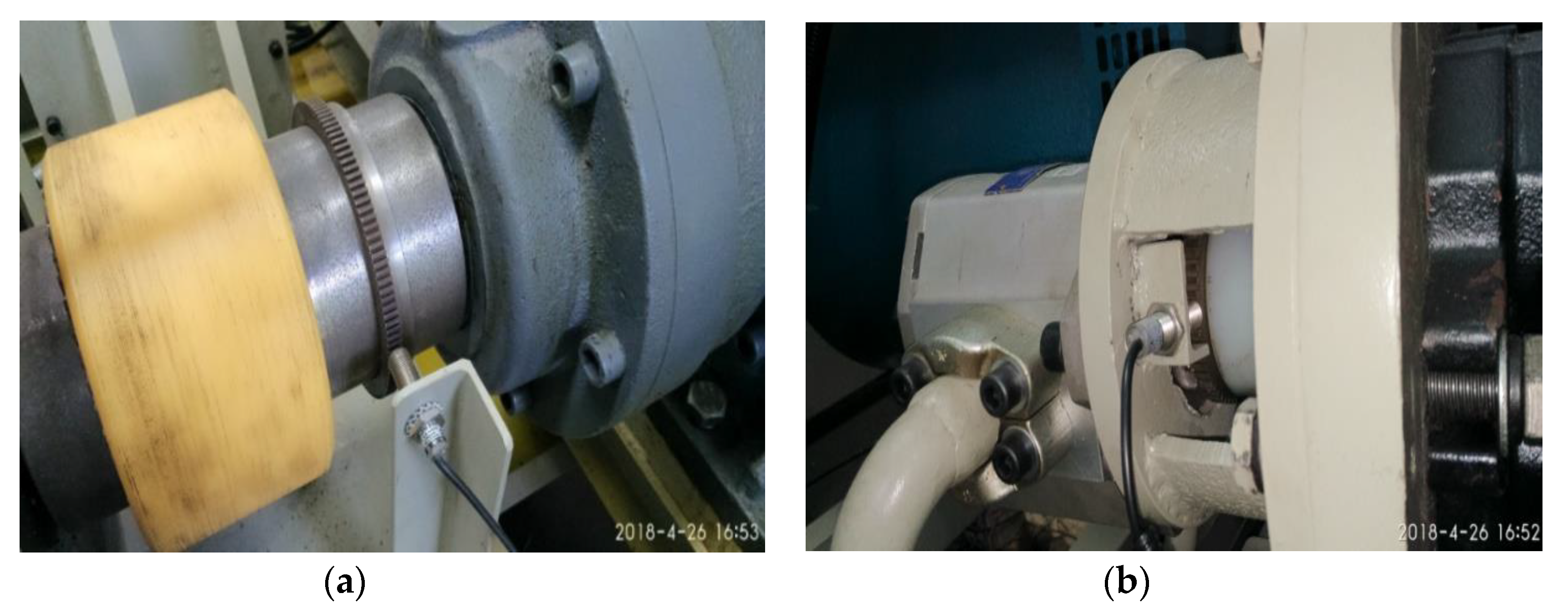
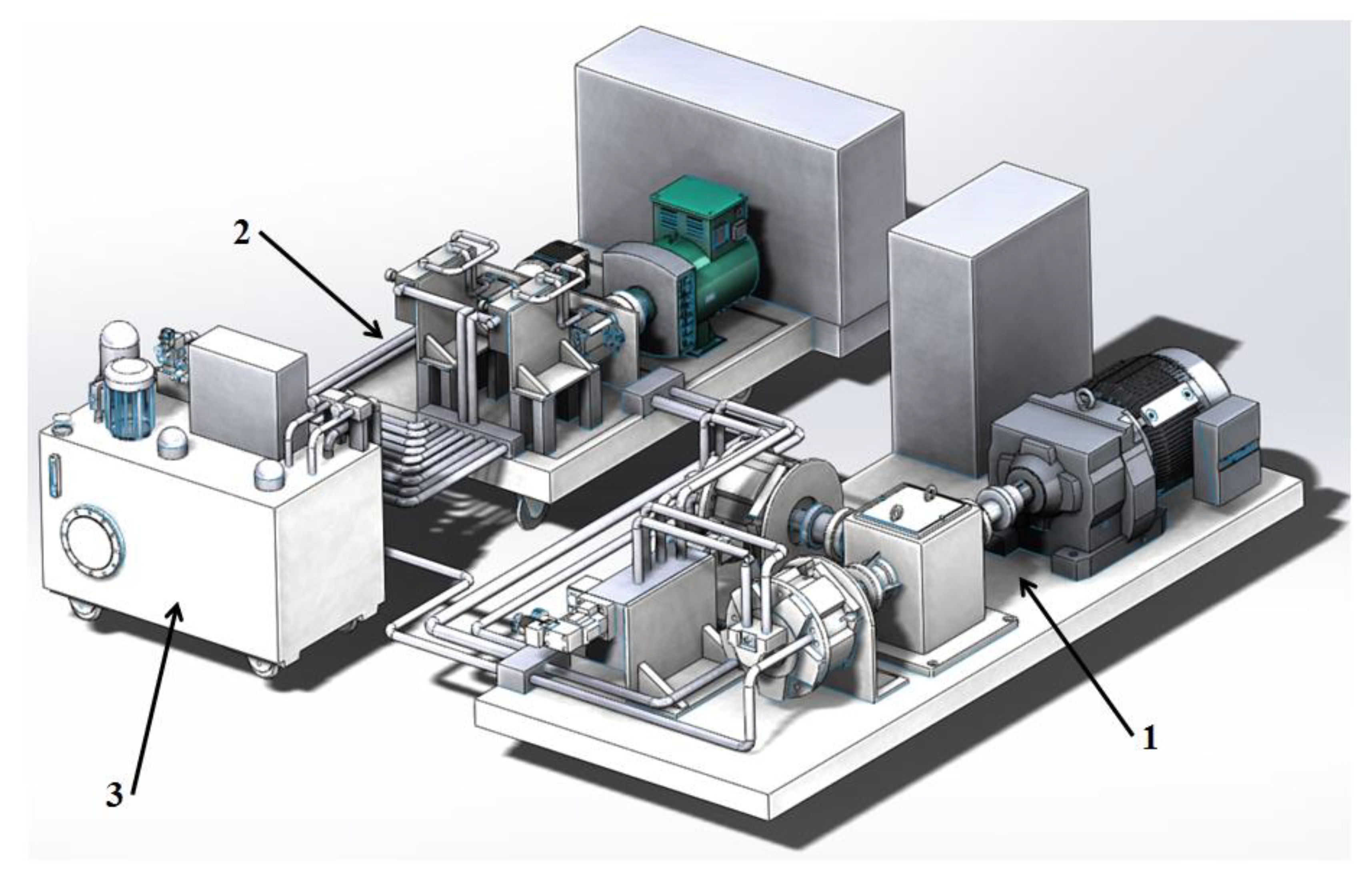
2.1. Composition of Hydraulic Transmission Control Power Generation System
2.2. Remote Monitoring and Diagnosis System Scheme
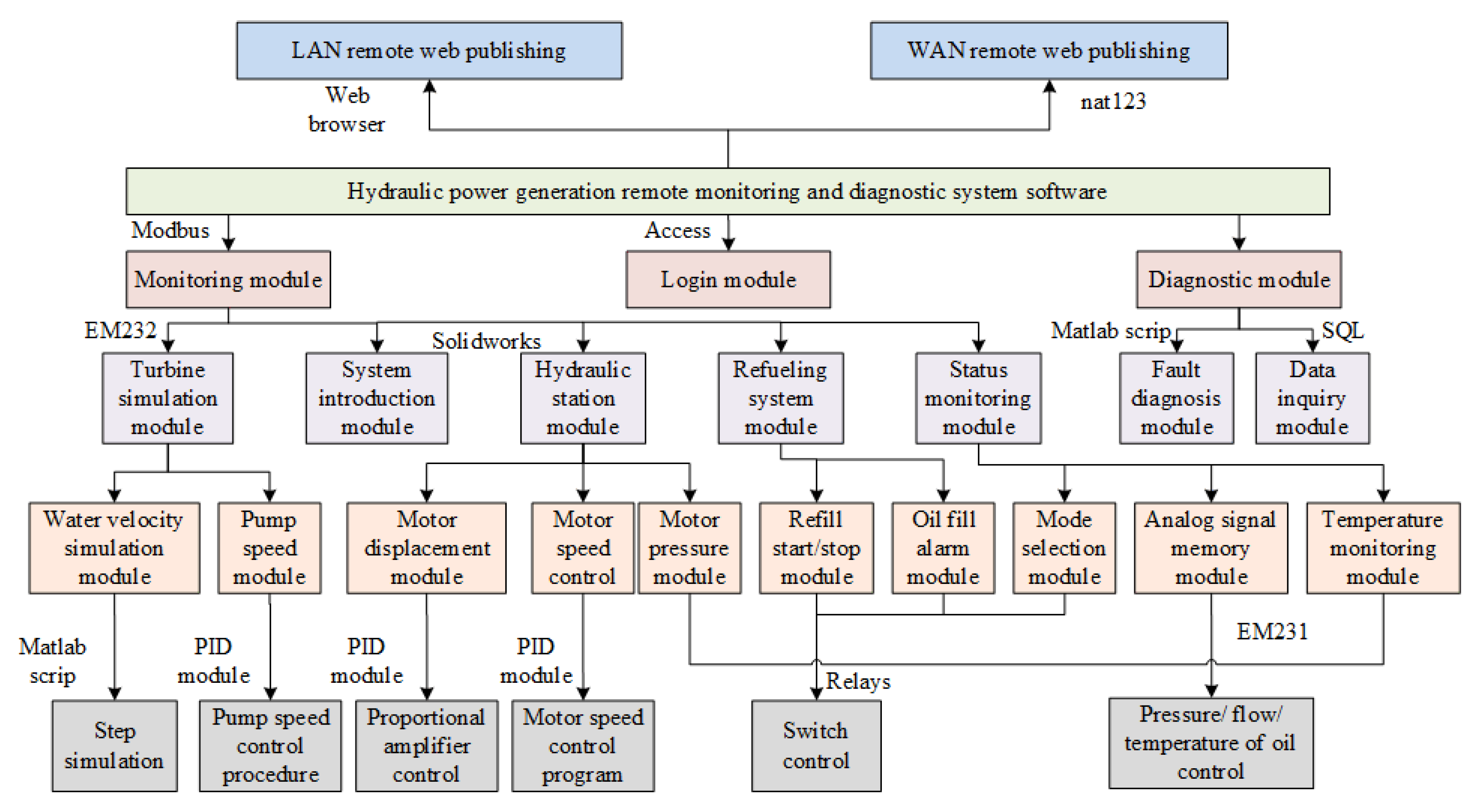
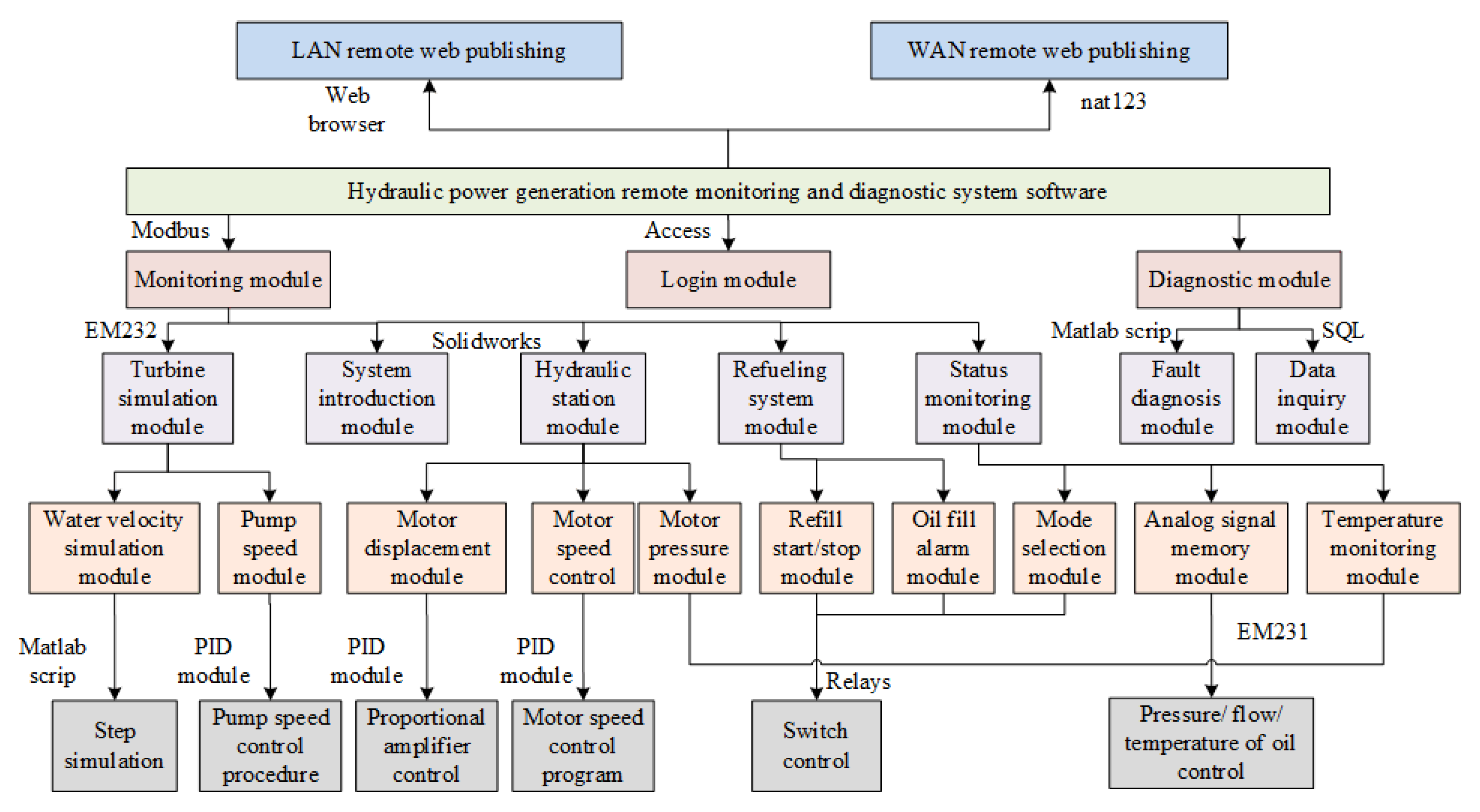
2.3. Software Design of Remote Monitoring and Diagnosis System for Hydraulic Transmission Control Power Generation
- (1)
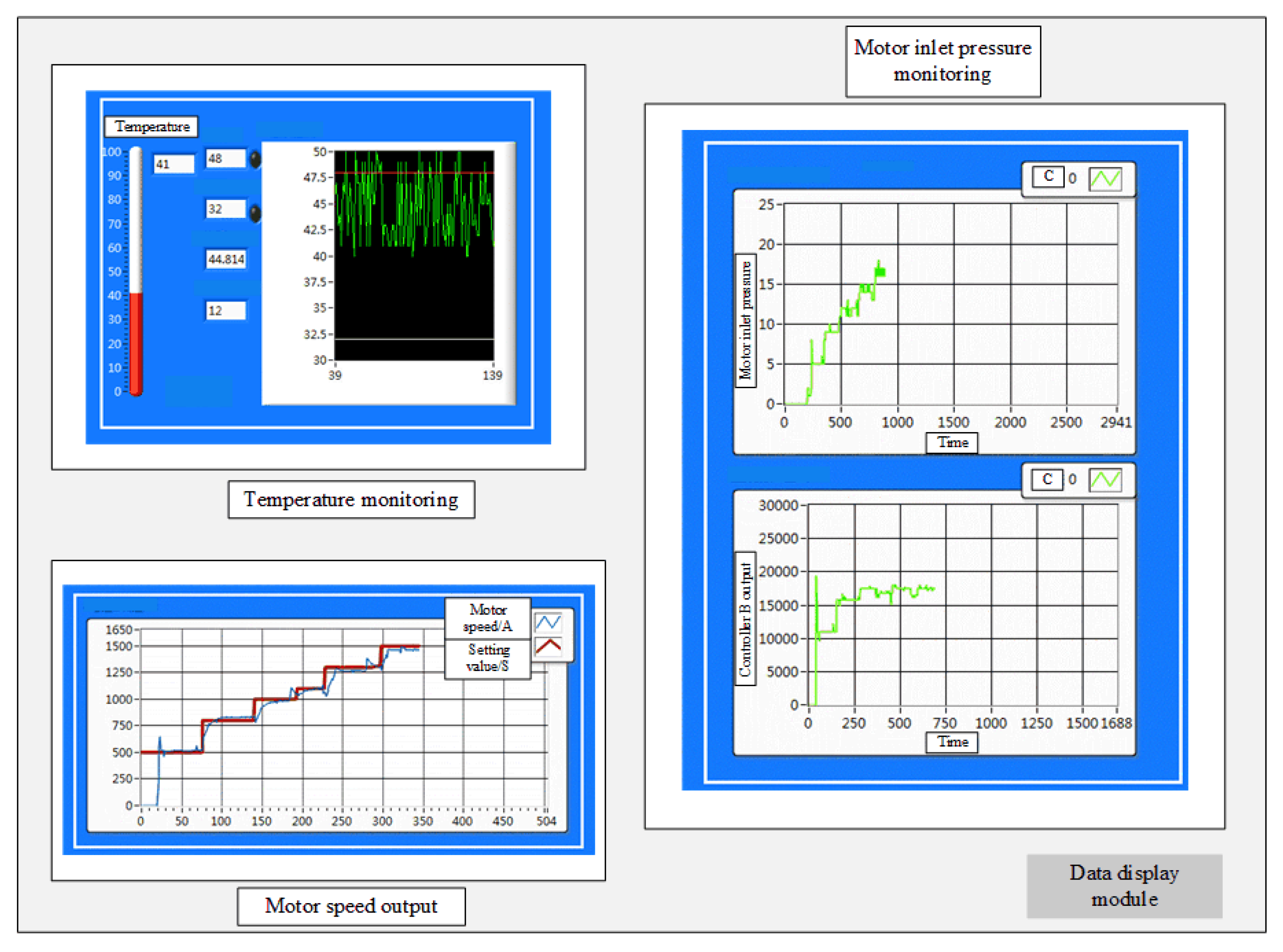
- Real-time monitoring: Real-time monitoring of the operating parameters of the hydraulic transmission and control power generation control, including motor output speed, pump speed, system flow, motor inlet pressure, inverter output frequency, system temperature, charge pressure, system pressure, return pressure, and generator voltage;
- (2)
- Real-time curve display: Real-time curve display of motor output speed, pump speed, motor inlet pressure, system temperature, and inverter output frequency in the hydraulic transmission, and control power generation system;
- (3)
- Historical data storage: Data storage of operating parameters in the hydraulic transmission and control power generation system, with a storage frequency of 100 Hz, to facilitate subsequent data analysis and processing;
- (4)
- Alarm data management: The upper and lower limits of the alarm value are set for specific variables, such as the liquid level and pressure of the hydraulic transmission and control power generation system;
- (5)
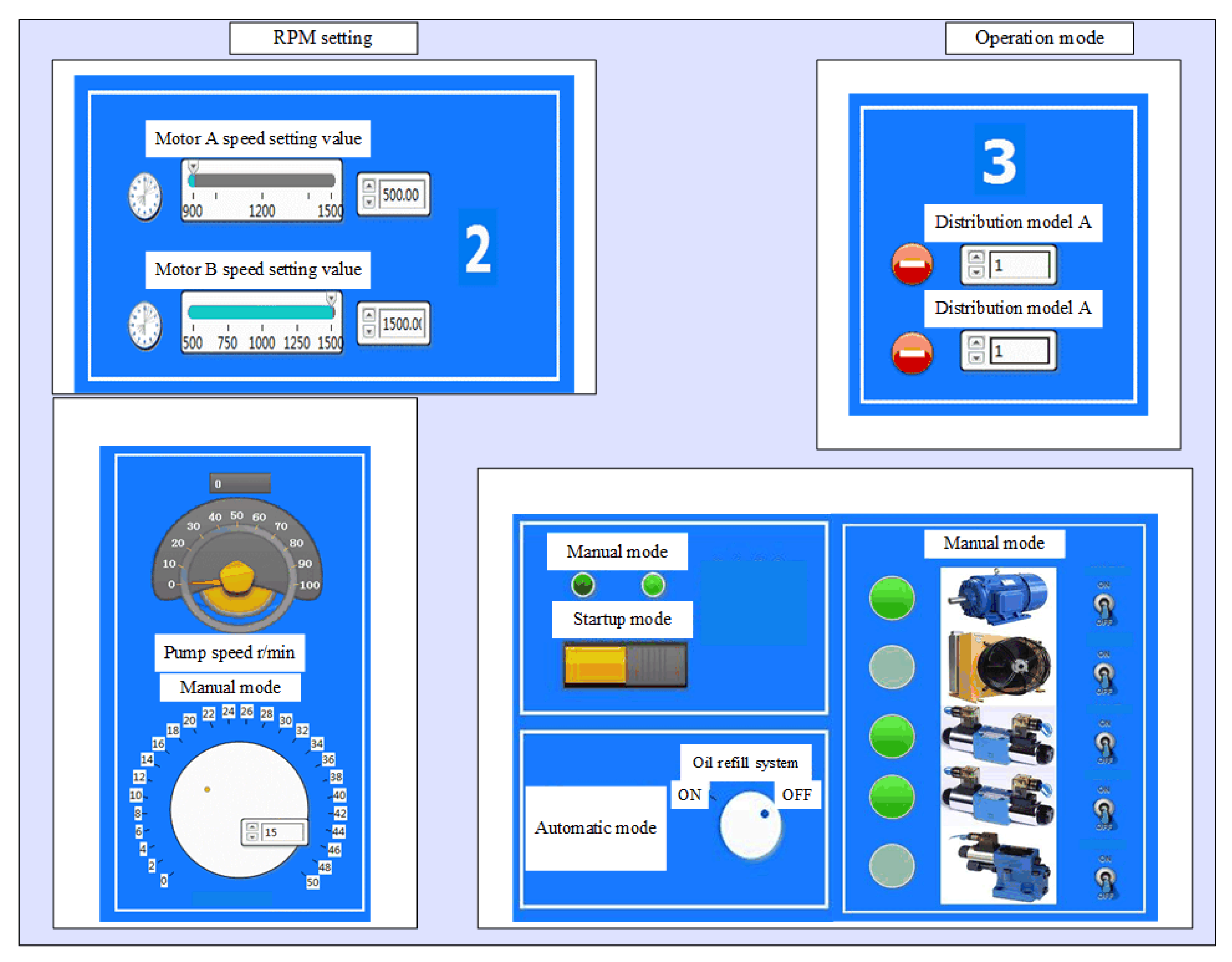
- Remote control function: Remote start/stop and parameter setting function for the oil replenishment and hydraulic station systems;
- (6)
- Fault diagnosis function: Fault diagnosis of the system’s normal operation, and failure of the accumulator, relief valve, hydraulic motor, and hydraulic pump, via a combination of the hydraulic transmission and control remote monitoring system and the proposed improved fault diagnosis model;
- (7)
- Data query function: The data query system is implemented using a database, in which the type and time of each failure are stored, and all information relating to previous failures in the system can be accessed via a query.
3. SVM Fault Diagnosis Based on Improved Particle Swarm Algorithm Optimization
Improved Particle Swarm Algorithm
- (1)
- Inertial weighting factor. The inertia weight factor was 0.3–0.7; this range of values was able to better neutralize the effect of local and global searches. In addition, a nonlinear decreasing change in inertia weight factor was proposed. As a result, the inertia weight factor was in the optimal interval in the iterations, and its formula is as follows:where is the maximum inertia weight and ; is the minimum inertia weight and ; t is the current evolutionary algebra; and T is the maximum number of iterations.
- (2)
- Acceleration factor. The acceleration factors (decreasing) and (increasing) can improve the algorithm effect during the iterative process. We proposed nonlinear decreasing variation in acceleration factor from 2.5 to 0.5, and in acceleration factor from 0.5 to 2.5. Its equation is as follows:where t is the current evolutionary algebra and T is the maximum number of iterations.
- (3)
- Local optimal stagnation perturbation. The particle is prone to local optimum phenomenon when searching in space. A method to cope with particles in stagnation was proposed to prevent this phenomenon from causing meaningless iterations and to determine whether the particle is in stagnation. This phenomenon was avoided by particle local optimum perturbation, which is obtained as follows:where is the current local optimum of the ith particle; is the local optimum after stagnation processing; indicates the uniform random numbers between 0 and 1; and t is the current evolutionary algebra.
- (4)
- Update of particle speed and position. Based on the optimized particle’s local optimum solution, the joint update of the formula for the particle velocity can be derived, as follows:
4. Realization of Remote Monitoring and Fault Diagnosis System for Hydraulic Transmission Control Power Generation
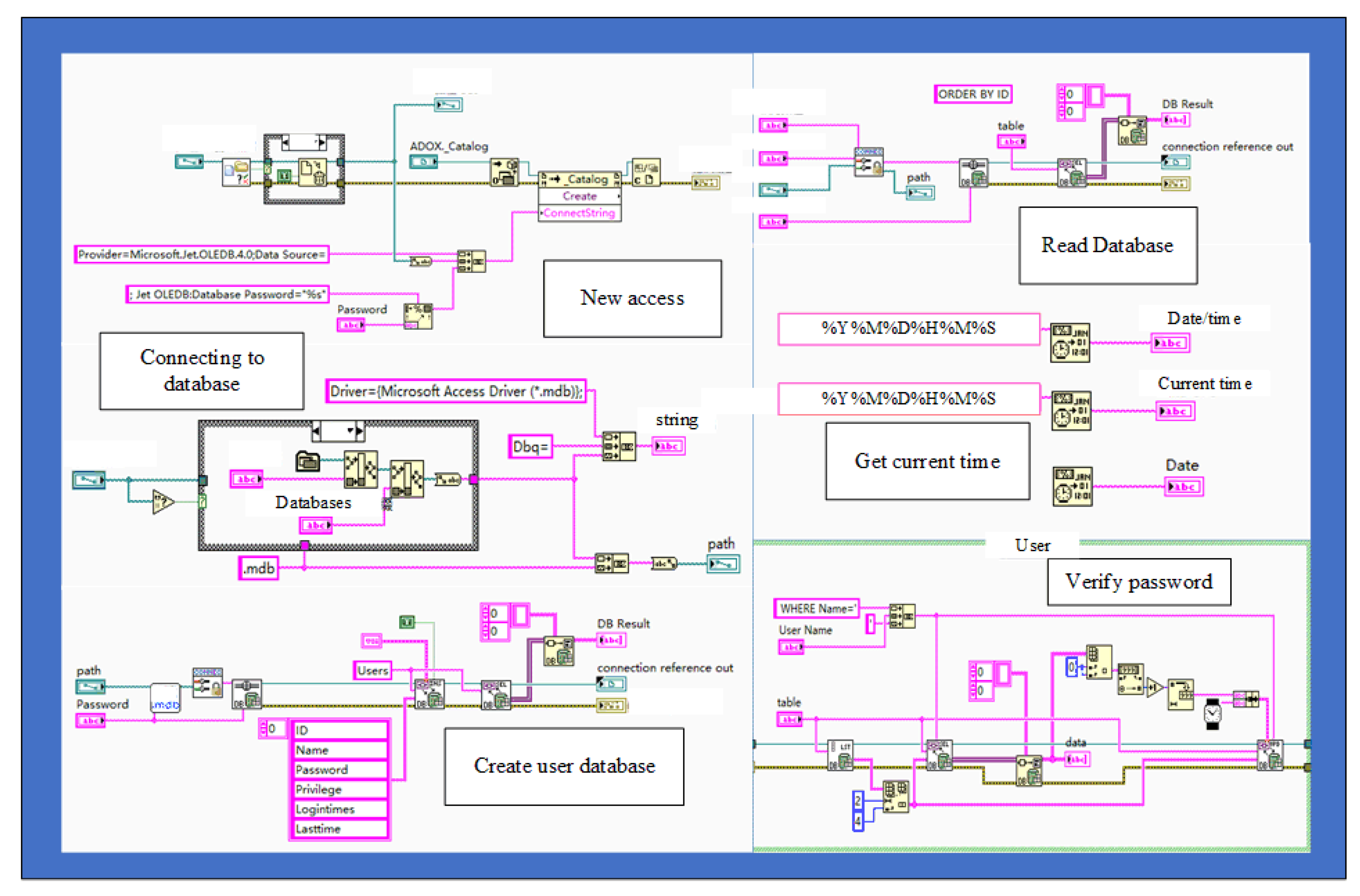
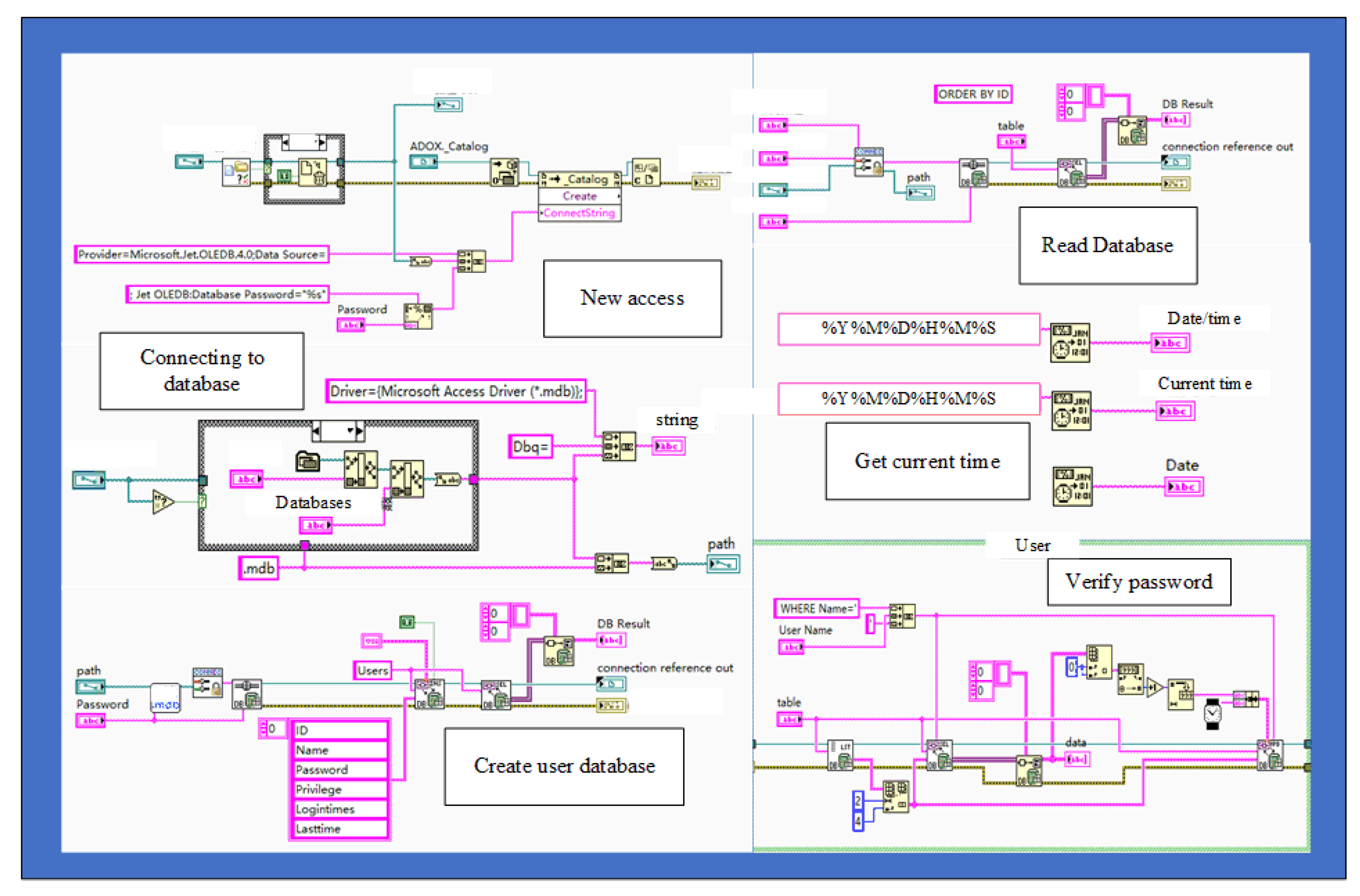
4.1. Database Selection
4.2. Operation Management Module
4.3. Parameter Setting Module
4.4. Run Operation Module
4.5. Data Display, Storage Module
5. Test
6. Results
7. Discussion
- (1)
- Due to restrictions relating to the experimental conditions, although numerous types of system faults exist, only four types of single faults that do not have serious impacts on the system were selected. However, actual system failure, which is not a normal operation, is caused by multiple faults, and the case of multiple concurrent faults should be considered to improve the fault diagnosis system;
- (2)
- The control index of this subject was studied under the condition of constant motor output speed. Several dynamic parameters could be simultaneously selected as control targets, thereby allowing a more accurate fault diagnosis of the system;
- (3)
- The data used in the proposed fault diagnosis model related to the hydraulic transmission and control power generation system, as the data of the entire life cycle were unavailable. However, diagnosis results would be more accurate if the data of the entire life cycle were analyzed.
8. Future Work
- (1)
- Compare the performance of the SVM and kNN algorithms for fault diagnosis of ocean current energy hydraulic transmission and control power generation system;
- (2)
- Carry out a comparison of the PSO + SVM algorithm with the PSO + KNN algorithm, including comparing the accuracy and the expectation aftereffect of the two algorithms;
- (3)
- Develop a hybrid algorithm of PSO + GWO to carry out our research for the fault diagnosis of ocean current energy hydraulic transmission and control power generation system and compare with our previous algorithms.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Leijon, J.; Forslund, J.; Thomas, K.; Boström, C. Marine Current Energy Converters to Power a Reverse Osmosis Desalination Plant. Energies 2018, 11, 2880. [Google Scholar] [CrossRef] [Green Version]
- Shadman, M.; Silva, C.; Faller, D.; Wu, Z.; de Freitas Assad, L.; Landau, L.; Levi, C.; Estefen, S. Ocean Renewable Energy Potential, Technology, and Deployments: A Case Study of Brazil. Energies 2019, 12, 3658. [Google Scholar] [CrossRef] [Green Version]
- Khan, N.; Kalair, A.; Abas, N.; Haider, A. Review of Ocean Tidal, Wave and Thermal Energy Technologies. Renew. Sustain. Energy Rev. 2017, 72, 590–604. [Google Scholar] [CrossRef]
- Xu, W.; Dong, Y.; Teng, X.; Zhang, P. Evaluation of the Development Intensity of China’s Coastal Area. Ocean. Coast. Manag. 2018, 157, 124–129. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power System Stabilization Using Virtual Synchronous Generator with Alternating Moment of Inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Tian, P.; Li, Z.; Hao, Z. A Doubly-Fed Induction Generator Adaptive Control Strategy and Coordination Technology Compatible with Feeder Automation. Energies 2019, 12, 4463. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Liu, Z. Impedance Modeling and Stability Analysis of the Converters in a Double-Fed Induction Generator (DFIG)-Based System. Energies 2019, 12, 2500. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Wang, X.; Zhang, F.; Liu, H.; Lin, Y. Review of the Application of Hydraulic Technology in Wind Turbine. Wind Energy 2020, 23, 1495–1522. [Google Scholar] [CrossRef]
- Zhang, W. Parameter Adjustment Strategy and Experimental Development of Hydraulic System for Wave Energy Power Generation. Symmetry 2020, 12, 711. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, G.; Wei, L.; Yue, D.; Tao, Y. Research on the Robustness of the Constant Speed Control of Hydraulic Energy Storage Generation. Energies 2018, 11, 1310. [Google Scholar] [CrossRef] [Green Version]
- Cai, B.; Liu, H.; Xie, M. A Real-Time Fault Diagnosis Methodology of Complex Systems Using Object-Oriented Bayesian Networks. Mech. Syst. Signal. Process. 2016, 80, 31–44. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Rajaei Salmasi, F. Analysis and Detection of a Wind System Failure in a Micro-Grid. J. Renew. Sustain. Energy 2016, 8, 043302. [Google Scholar] [CrossRef]
- Leahy, K.; Hu, R.L.; Konstantakopoulos, I.C.; Spanos, C.J.; Agogino, A.M. Diagnosing Wind Turbine Faults Using Machine Learning Techniques Applied to Operational Data. In Proceedings of the 2016 IEEE International Conference on Prognostics and Health Management (ICPHM), Ottawa, ON, Canada, 20–22 June 2016; pp. 1–8. [Google Scholar]
- Hosseinzadeh, M.; Rajaei Salmasi, F. Islanding Fault Detection in Microgrids—A Survey. Energies 2020, 13, 3479. [Google Scholar] [CrossRef]
- Hu, R.L.; Leahy, K.; Konstantakopoulos, I.C.; Auslander, D.M.; Spanos, C.J.; Agogino, A.M. Using Domain Knowledge Features for Wind Turbine Diagnostics. In Proceedings of the 2016 15th IEEE International Conference on Machine Learning and Applications (ICMLA), Anaheim, CA, USA, 18–20 December 2016; pp. 300–307. [Google Scholar]
- Yang, C.G.; Zhang, C.H.; Zhao, J.Y.; Zhao, S.M. Research on Active Online Diagnosis Technology of Hydraulic System. In Applied Mechanics and Materials; Trans Tech Publications, Ltd.: Freienbach, Switzerland, 2014; Volume 599–601, pp. 1032–1035. [Google Scholar] [CrossRef]
- Yin, S.; Ding, S.X.; Haghani, A.; Hao, H.; Zhang, P. A Comparison Study of Basic Data-Driven Fault Diagnosis and Process Monitoring Methods on the Benchmark Tennessee Eastman Process. J. Process. Control. 2012, 22, 1567–1581. [Google Scholar] [CrossRef]
- Xu, G.; Liu, M.; Jiang, Z.; Shen, W.; Huang, C. Online Fault Diagnosis Method Based on Transfer Convolutional Neural Networks. IEEE Trans. Instrum. Meas. 2020, 69, 509–520. [Google Scholar] [CrossRef]
- Tang, S.; Yuan, S.; Zhu, Y. Deep Learning-Based Intelligent Fault Diagnosis Methods Toward Rotating Machinery. IEEE Access 2020, 8, 9335–9346. [Google Scholar] [CrossRef]
- Zhou, Q.; Xiong, T.; Wang, M.; Xiang, C.; Xu, Q. Diagnosis and Early Warning of Wind Turbine Faults Based on Cluster Analysis Theory and Modified ANFIS. Energies 2017, 10, 898. [Google Scholar] [CrossRef] [Green Version]
- Arana-Daniel, N. Complex and Hypercomplex-Valued Support Vector Machines: A Survey. Appl. Sci. 2019, 9, 3090. [Google Scholar] [CrossRef] [Green Version]
- Çomak, E.; Arslan, A. A New Training Method for Support Vector Machines: Clustering k-NN Support Vector Machines. Expert Syst. Appl. 2008, 35, 564–568. [Google Scholar] [CrossRef]
- Singh, N.; Singh, S.B. Hybrid Algorithm of Particle Swarm Optimization and Grey Wolf Optimizer for Improving Convergence Performance. J. Appl. Math. 2017, 2017, 2030489. [Google Scholar] [CrossRef]
- Holden, N.; Freitas, A.A. A Hybrid PSO/ACO Algorithm for Discovering Classification Rules in Data Mining. J. Artif. Evol. Appl. 2008, 2008, 316145. [Google Scholar] [CrossRef] [Green Version]
- Esmin, A.A.A.; Matwin, S. HPSOM: A hybrid particle swarm optimization algorithm with genetic mutation. Int. J. Innov. Comput. Inf. Control 2013, 9, 1919–1934. [Google Scholar]
- Esmin, A.A.A.; Lambert-Torres, G.; Alvarenga, G.B. Hybrid Evolutionary Algorithm Based on PSO and GA Mutation. In Proceedings of the 2006 Sixth International Conference on Hybrid Intelligent Systems (HIS’ 06), Rio de Janeiro, Brazil, 13–15 December 2006; p. 57. [Google Scholar]
- Niu, B.; Li, L. A Novel PSO-DE-Based Hybrid Algorithm for Global Optimization. In Proceedings of the Advanced Intelligent Computing Theories and Applications. With Aspects of Artificial Intelligence, Shanghai, China, 15–18 September 2008; Huang, D.-S., Wunsch, D.C., Levine, D.S., Jo, K.-H., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 156–163. [Google Scholar]
- Woo, S.; Vacca, A. Experimental Characterization and Evaluation of the Vibroacoustic Field of Hydraulic Pumps: The Case of an External Gear Pump. Energies 2020, 13, 6639. [Google Scholar] [CrossRef]
- Shang, X.; Zhou, H.; Yang, H. Improving Performance of a Resonant String-Based Pulsation Attenuator in Hydraulic Systems. Appl. Sci. 2020, 10, 8526. [Google Scholar] [CrossRef]
- Short, M.; Twiddle, J. An Industrial Digitalization Platform for Condition Monitoring and Predictive Maintenance of Pumping Equipment. Sensors 2019, 19, 3781. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kennedy, J.; Eberhart, R.C. Particle Swarm Optimization. In Proceedings of the IEEE International Conference on Neural Networks, IEEE Service Center, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Mountrail, G.; Im, J.; Ogole, C. Support Vector Machines in Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Running Time/h | Training Accuracy/% | Testing Accuracy/% | RMSE |
|---|---|---|---|---|
| PSO | 20 | 99.97 | 89.52 | 0.0192 |
| PSVM | 12 | 99.96 | 99.72 | 0.0006497 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, W.; Wei, H.; Guo, P.; Guo, R. Remote Monitoring and Fault Diagnosis of Ocean Current Energy Hydraulic Transmission and Control Power Generation System. Energies 2021, 14, 4047. https://doi.org/10.3390/en14134047
Su W, Wei H, Guo P, Guo R. Remote Monitoring and Fault Diagnosis of Ocean Current Energy Hydraulic Transmission and Control Power Generation System. Energies. 2021; 14(13):4047. https://doi.org/10.3390/en14134047
Chicago/Turabian StyleSu, Wenbin, Hongbo Wei, Penghua Guo, and Ruizhe Guo. 2021. "Remote Monitoring and Fault Diagnosis of Ocean Current Energy Hydraulic Transmission and Control Power Generation System" Energies 14, no. 13: 4047. https://doi.org/10.3390/en14134047