2.2. Hydraulic Model Experiment
Ship motions are represented by six main components corresponding to the six degrees of freedom in the 3D space. Surge, sway, and heave correspond to the translation motions along the x, y, and z-axis respectively, while roll, pitch, and yaw are the rotation motions also in the x, y, and z respectively. Because numerical simulations do not compute the ship motions [
14], a hydraulic model experiment is applied in this research to implement a hydraulic phenomenon consistent with the practical phenomenon such as ship’s movement. To this end, conditions similar to practical conditions are established in the model, and water is applied. When a hydraulic model reflecting the prototype conditions at a reduced scale is utilized to solve the problem provided in the experiment, a rule for clearly defining a relationship between the prototype and the model should be developed to predict values in prototype conditions based on experimental results. To satisfy similarity between the prototype and the model, geometric, kinematic, and dynamic similarity should be fulfilled [
15].
Geometric similarity refers to the scale of the prototype being reduced by a certain ratio and implemented in a model. A model is called a normal model when the same scaling ratio is applied to both the vertical and horizontal dimensions. If not, it is called a tilted model. The length ratio is a factor serving as a standard in the geometric similarity law, and is expressed as follows:
Here, L is the length, and subscripts γ, ρ, m are the scaling ratio, prototype, and model, respectively.
Kinematic similarity means that an acceleration ratio should be maintained to be constant at the corresponding point between the prototype and the model. In other words, the velocity and acceleration of the prototype are represented at a certain scale in the model concerning form-related similarity. In the kinematic similarity law, a velocity ratio, acceleration ratio, and time ratio (
Tγ) are expressed as:
Dynamic similarity refers to the scale of the entire force applied to the prototype, including geometric similarity and kinematic similarity reduced at a certain ratio, which should be consistently applied to the model as well. Although it is desirable to satisfy dynamic similarity in a hydraulic model experiment, the entire force is unlikely to be implemented simultaneously in such experiments, excluding prototype-based experiments. Thus, the most essential force is determined in a process of experiment planning, and dynamic similarity is satisfied according to the force determined. Appropriate calibration is applied to the other types of force. In the dynamic similarity law, inertial force serves as a crucial factor when the force for accelerating fluid exists. Fluid acceleration does not occur as an exceptional case at uniform laminar flow. For this reason, inertial force does not serve as a crucial factor under this condition. The inertial force ratio is expressed as follows:
Gravity dominates fluid movement under the conditions of waves, currents, or free surface flow, such as open-channel flow. The Froude similarity ratio is applied to the relationship of similarity between the prototype and the model. The scale of the Froude similarity law is as follows:
Here, subscripts ρ, m, and r refer to the model, prototype, and ratio of the prototype to the model, respectively. The entire quantities expressed with the subscript r indicate the quantities of the prototype divided by those of the model. When a scale is determined according to the Froude similarity, physical properties of the model, a possibility of production of the model, cost, and experimental flow that can be supplied are considered. If the scale is too minor, a similarity relationship between the model and prototype may not be established, owing to the scale effect. Therefore, it is important to set an appropriate scale. In this study, the Froude similarity law is applied, given the conditions that gravity dominates flow, turbulent flow is observed, and geometric, kinematic, and dynamic similarities between the prototype and the model are required.
The scale of a model is determined in consideration of targets to be observed in an experiment, experimental conditions, and scales that can ensure the efficiency of the similarity law. As the effects of forces dominating the flow in a prototype are directly applied to a model following the similarity law, the forces dominating the flow in both the prototype and model should be consistent. However, the scale of the model in which the state of flow is dominated by gravity is excessive, and the dominance of the viscous force becomes considerably strong due to the significant decrease in water depth. To avoid the undesirable scale effect, certain scales in the model should be calibrated to maintain the flow states in both the prototype and model under the same dominating force [
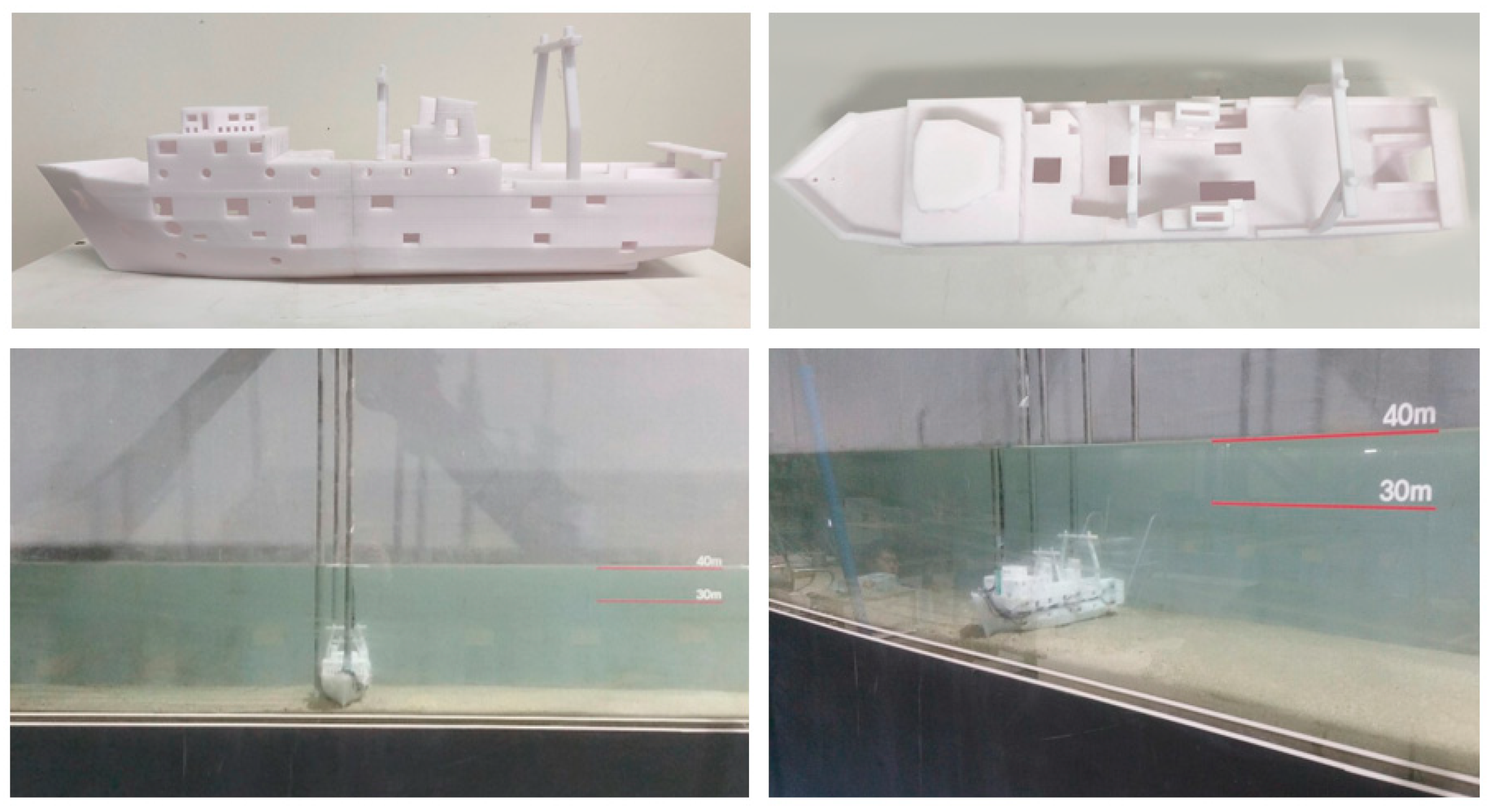
15]. Although it is desirable to produce a model with the maximum scales applied, conditions such as the degree of measurement, size of experimental instruments, and similarity related to phenomena should be practically considered. Thus, a vertical or perpendicular scale of 1/150 was applied in this study as shown in the sunken model in
Figure 4. This scale model uses the actual blueprint of the vessel and was printed using a 3D printer considering the scale of 1/150.
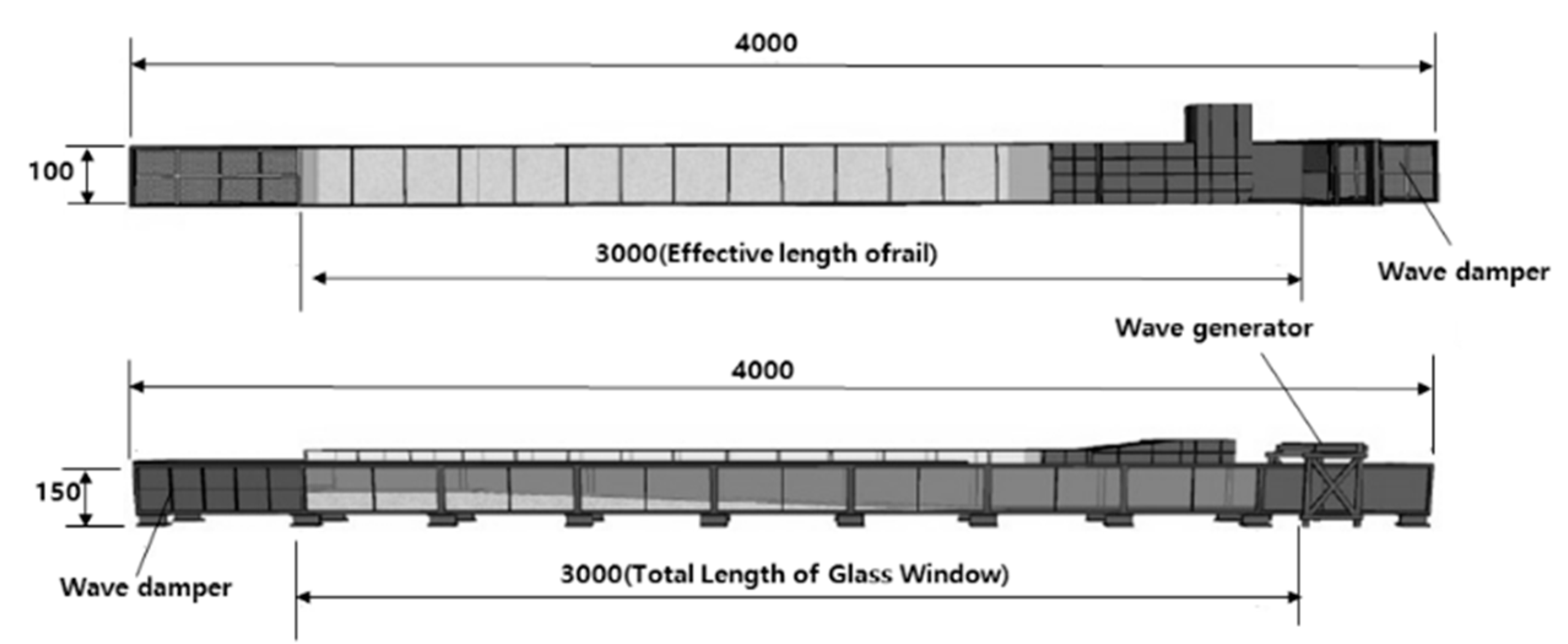
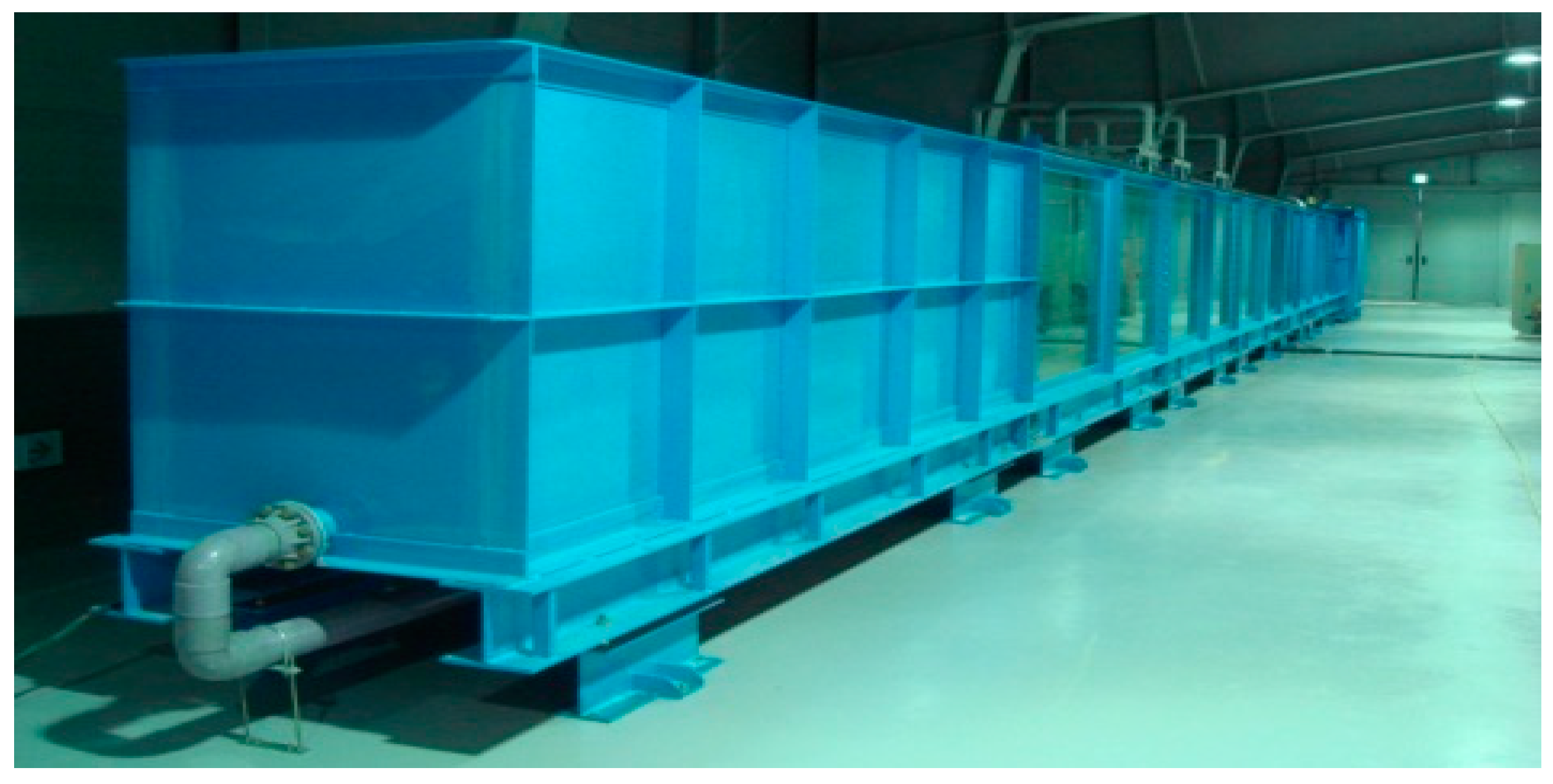
Two-Dimensional Cross-Sectional Hydraulic Model Experiment
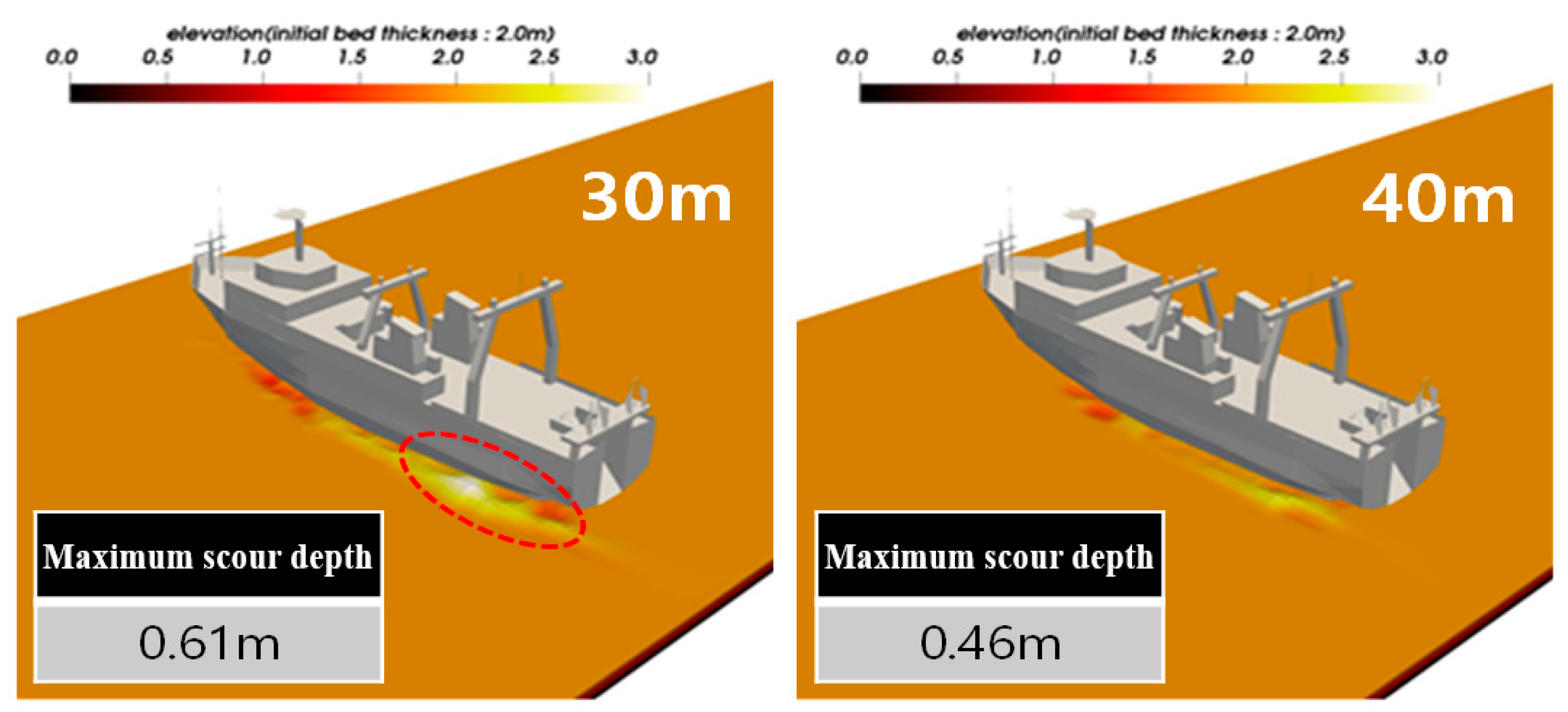
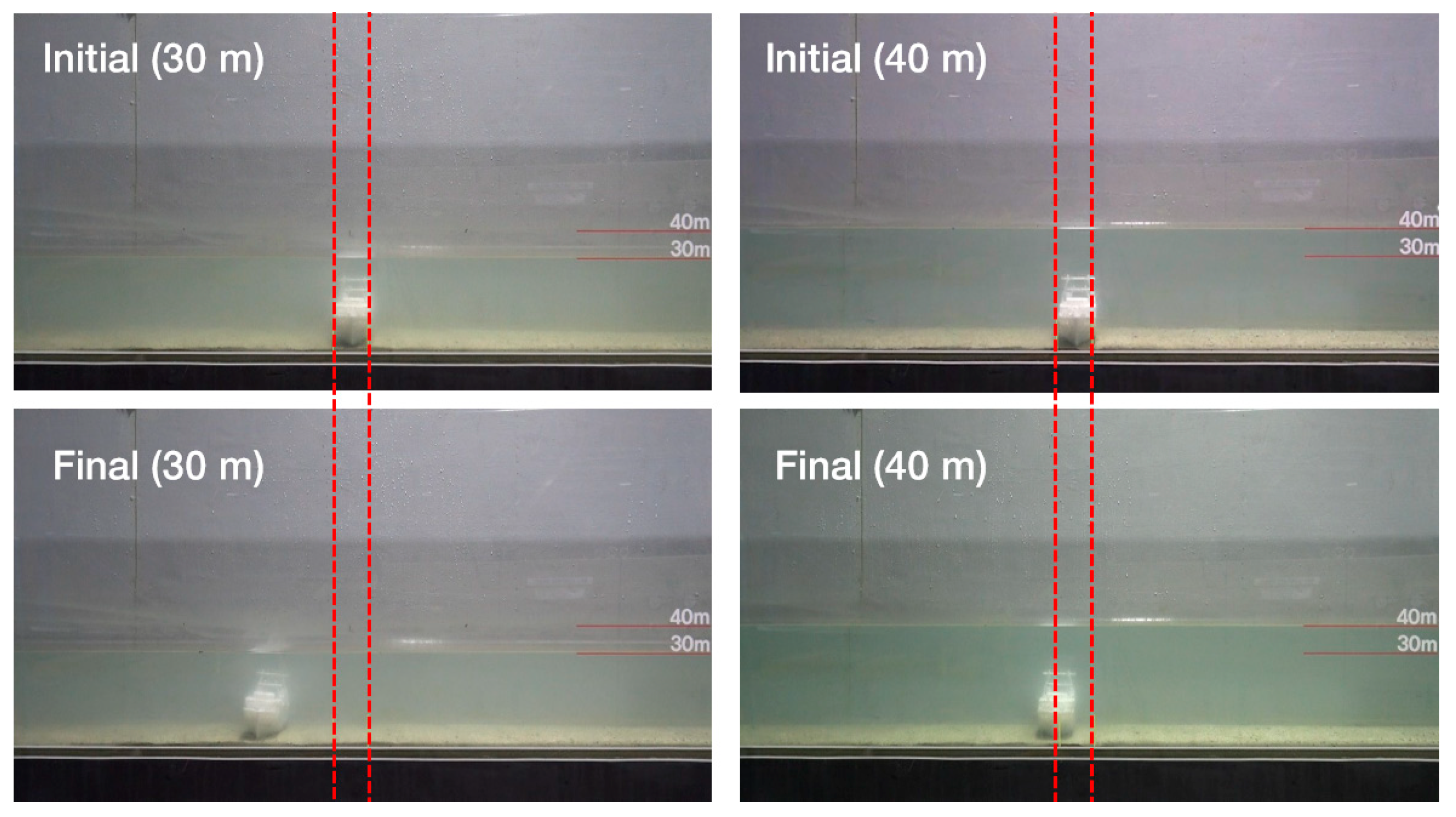
A hydraulic model experiment was performed to visually confirm the scour depth and wave pressure analyzed by the numerical model experiment, and to review the stability of the artificial reef. The two-dimensional cross-sectional tidal wave water tank used in this experiment generated waves by using a piston that was 45 m in length, 1.0 m in width, and 1.0 m in height as indicated in
Table 4 and
Figure 5. The maximum wave period generated was calculated to be 0.1–3.0 s, and the maximum wave height generated was 0.3 m. As mentioned earlier, the artificial reef model based on the sunken vessel was produced at the scale of 1/150 through 3D printing for use in the hydraulic model experiment. In addition, the weight of the structure was adjusted based on a mortar and a lead sinker, following the similarity law.
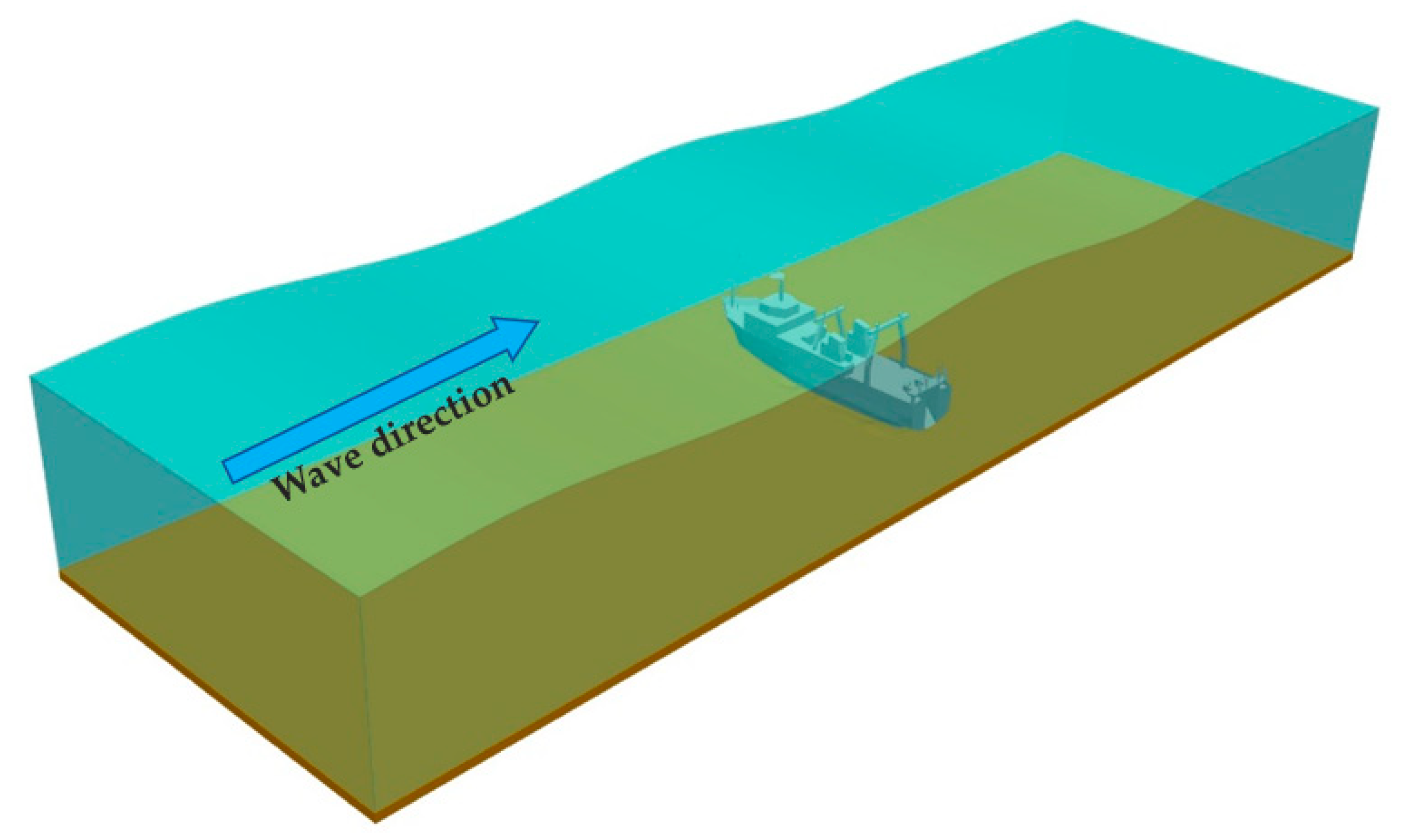
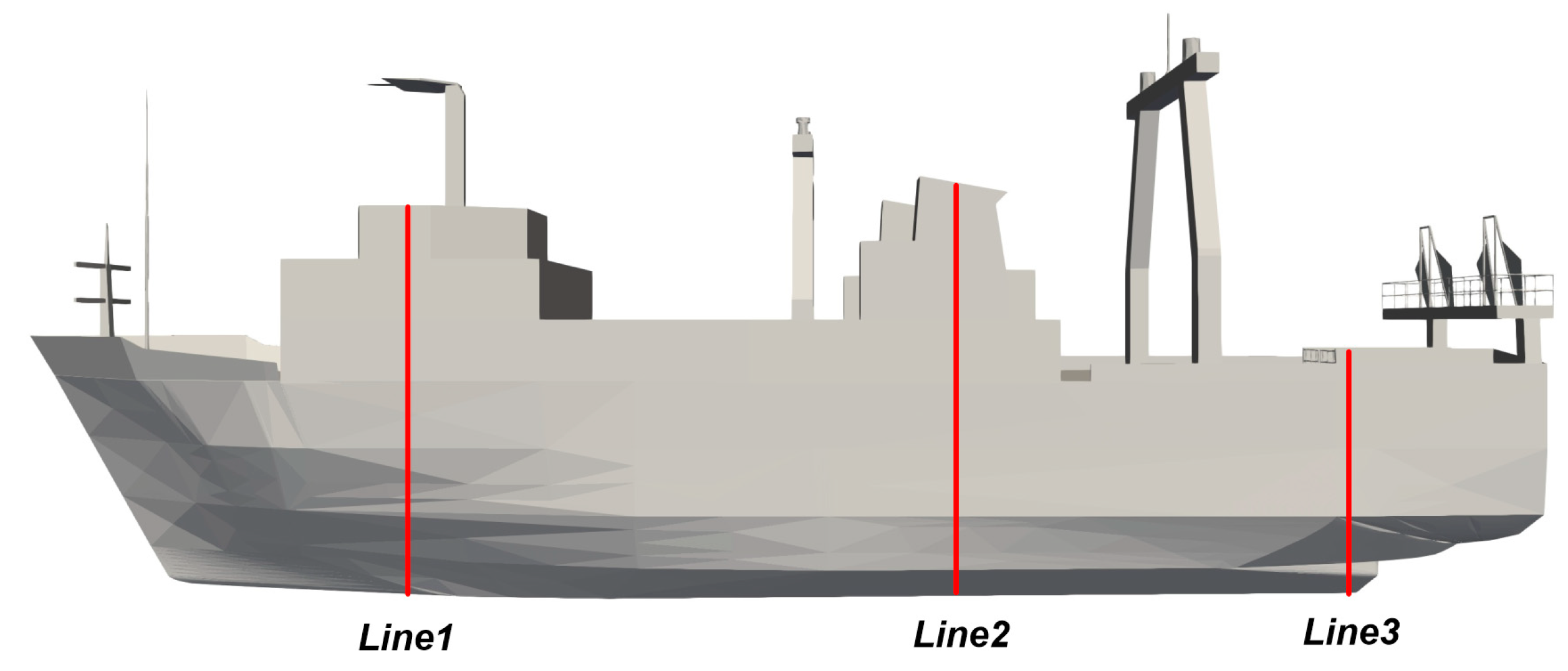
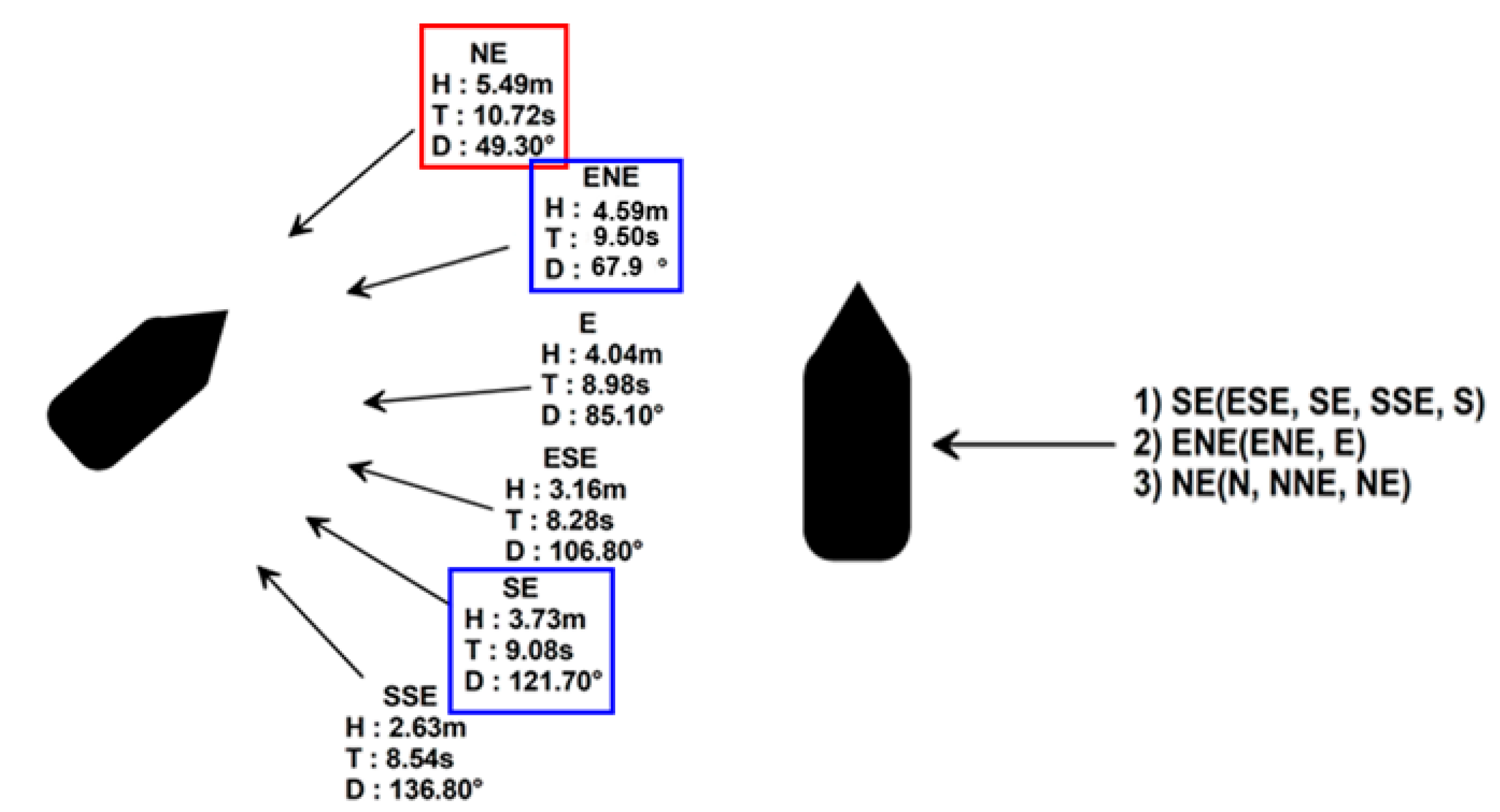
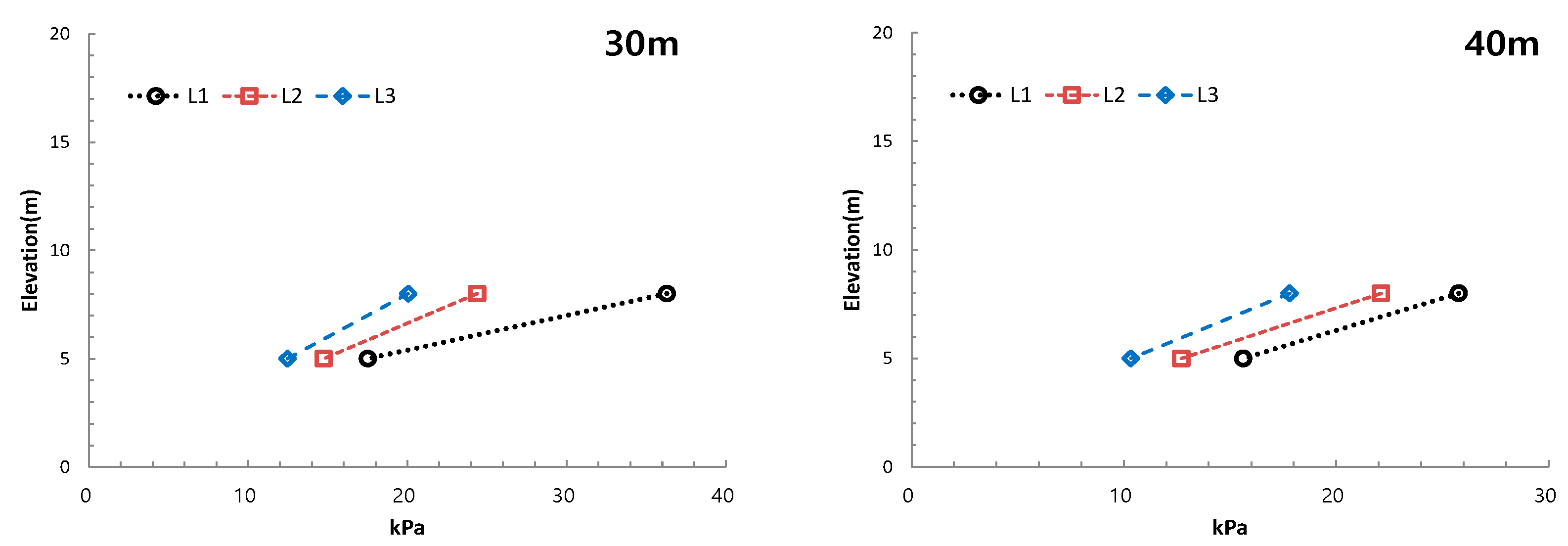
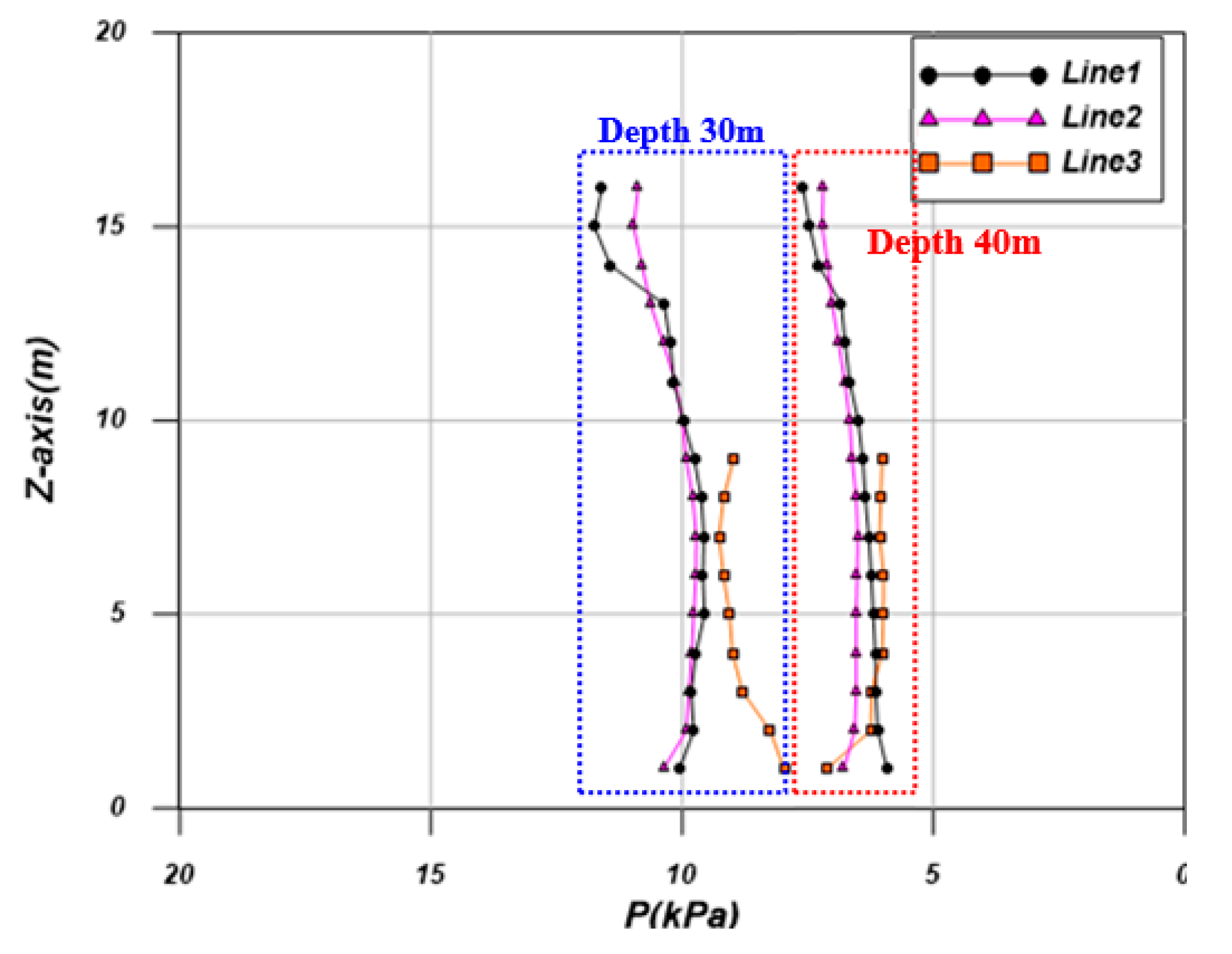
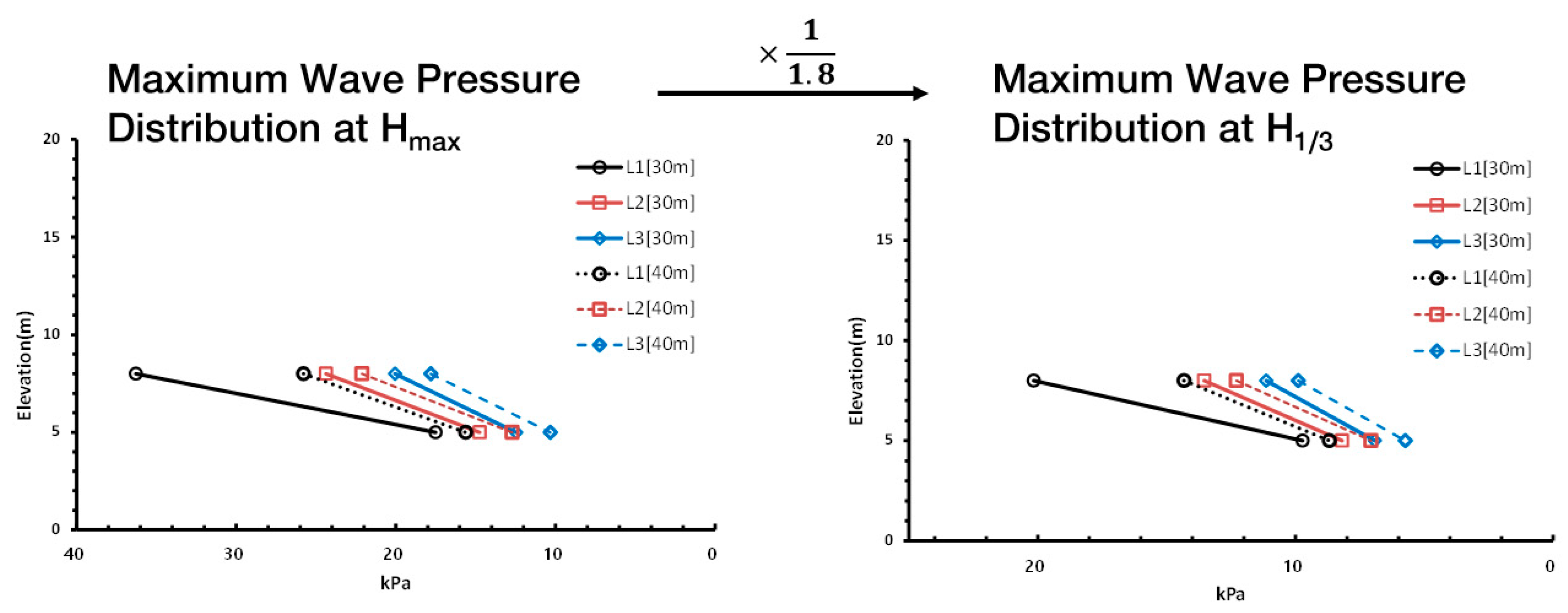
The wave pressure distribution affecting members of the artificial reef was examined to analyze the stability of the artificial reef against waves approaching from the side. The wave sign and tidal wave time were established as the approach time based on 1000 waves in the SE wave direction, which were consistent with the conditions applied in the numerical experiment. As for wave pressure measurement, data were obtained at intervals of 1000 Hz to analyze the maximum wave pressure affecting the artificial structure. Measurement was performed at six points, and the wave pressure gauge used in the experiment had a measurement range of 0.1 Pa, which allowed this device to measure minute pressure changes. The experiment details are listed in
Table 5.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


