Abstract
The integration of photovoltaic systems (PVS) in electric vehicles (EV) increases the vehicle’s autonomy by providing an additional energy source other than the battery. However, current solar cell technology generates around 200 W for a 1.4 panel (to be installed on the roof of the EV) at stable irradiance conditions. This limitation in production and the sudden changes in irradiance produced by shadows of clouds, buildings, and other structures make developing a fast and efficient maximum power point tracking (MPPT) technique in this area necessary. This article proposes an artificial neural network (ANN)-based MPPT, called DS-ANN, that uses manufacturer datasheet parameters as inputs to the network to address this problem. The Bayesian backpropagation-regularization performs the training, ensuring that the MPPT technique operates satisfactorily on different PVS without retraining. We simulated the response of 20 commercial modules against actual irradiance data to validate the proposed method. The results show that our method achieves an average tracking efficiency of 99.66%, improving by 1.21% over an enhanced P&O method.
1. Introduction
Solar energy is a promising and freely available energy source for countering carbon dioxide emissions () produced by burning fossil fuels. The massive releases of contribute strongly to global warming and affect ecological communities through multiple processes, including temperature elevation, extreme weather events, and rising air pollution [1,2,3].
In recent years, PVS has become a popular form of electrical generation due to its advantages, such as the absence of fuel cost, infrequent maintenance, and noiseless operation. This growth is supported by extensive research, with more than 48,000 studies published on solar energy since 1900. Half of those publications appeared between 2015 and 2020. This work has allowed a significant reduction in costs by introducing new materials and better technology [4]. As a result, the broad integration of photovoltaic (PV) generation in the residential, commercial, and industrial sectors drastically decreased their emissions [5].
Nevertheless, the transportation sector has not shown much improvement in lowering its emissions since it depends almost exclusively on internal combustion engine vehicles. From 2001 to 2011, emissions increased by 13%, 25% of which is attributed to vehicles [6]. To reduce emissions, many countries are making strategic plans to replace conventional vehicles with electric vehicles (EV) [7]. Furthermore, the integration of PV panels on their rooftops and hoods as an additional power source would increase the driving distance and decrease the amount of fossil fuel burnt to provide electricity for battery charging [8,9]. Some car manufacturers such as Mercedes Benz (E-Class, 1987) and Audi (A8, 1994; A4, 2001) introduced photovoltaic panels in some of their vehicles as an added value. In 2011, the Fisker Karma became the first mass-produced vehicle with a sunroof; however, the project did not work out. Other manufacturers such as Toyota (Prius, since 2010) and Hyundai (Sonata, 2020) offer special editions of their hybrid vehicles that include a sunroof; nevertheless, both manufacturers offer this characteristic as an added value [10]. In June 2021, the Lightyear One solar car set a new autonomy record, achieving a distance of 725 km on a single charge, an improvement close to 20% over purely electric vehicles [11]. Lightyear One’s body design provides the least air resistance, and the inclusion of PV panels shows promising results [12].
The low conversion efficiency of solar cells is the main difficulty that prevents their widespread use in the transportation sector. Improving the conversion efficiency of PV cells is not easy, as it depends on the currently available technology [13]. Consequently, how to generate the maximum amount of energy is one problem that must be solved.
In a PVS, solar irradiance and temperature are two key factors that directly affect the amount of produced energy [14]. There is a unique operating point under certain atmospheric conditions at which its power output is the maximum [15]. Thus, the PVS should always operate at the maximum power point (MPP). The control action that maintains the PVS operating at its MPP is known as MPP tracking (MPPT).
An extensive amount of research has been conducted, and many MPPT methods have been proposed so far [16,17,18,19,20]. Among the numerous MPPT techniques described in the literature, P&O [21,22,23,24,25,26] is the most popular one, and it is widely installed in commercial PVS using low-cost microprocessors [27]. Despite the algorithm’s simplicity and reliability, it forces the PVS operating point to go back and forth around the MPP, resulting in continuous output power oscillations. As a result, the energy yield reduces, and hence the efficiency drops [28].
Many new MPPT methods based on fuzzy logic (FL) [29,30,31,32], evolutionary algorithms (EA) [33,34,35], hybrid methods [36,37,38], and other methods [39,40,41,42] have been applied to PVS. Considering the expected performance of the revised MPPT techniques in EV applications, they share one main problem: the tracking speed is not fast enough to follow sudden changes in irradiance. These changes are more common in vehicles than in fixed-location PVS due to the exposition to shadows from trees, buildings, and structures, caused mainly by the displacement of the vehicle [8].
Fortunately, artificial neural networks (ANNs) can quickly and precisely respond once the training concludes. Numerous studies demonstrate the capability of ANNs as MPPT techniques [43]. In this manner, the input signals to the ANN can be electrical (voltage and current) [13,44,45,46], non-electrical (temperature and irradiance) [47,48,49,50], or any combination of these [8,51,52,53]. Generally, electrical inputs are preferred to non-electrical inputs from cost and robustness points of view [8].
While ANNs can perform efficiently in real-time [54,55,56], they present two major drawbacks: long training times [57] and strong dependency on training data [58]. Although the training process is computationally intensive and often requires a large amount of time, modern parallel computing systems provide the capability to reduce it [59]. Also, cloud computing may provide an excellent way for processing large volumes of data without any hardware investment [60]. Once the training completes, the configuration (weights and activation functions) can be transferred to low-cost embedded systems based on FPGAs [61,62] or micro-controllers [63,64,65].
On the other hand, it is not possible to guarantee network performance when the inputs to the network are outside the range of the training set [66]. There is a significant flaw in most revised ANN-based MPPT methods: the network is trained with data collected from a single PVS (or with different PVS sharing the same characteristics) [49]. Thus, the ANN-based MPPT might not perform satisfactorily in a PVS with different characteristics without retraining the ANN.
To overcome this issue, Natsheh et al. [67] present an ANN-based MPPT whose inputs are the cell temperature, the solar irradiance, and the PVS reference open-circuit voltage (). This approach was able to estimate the MPPT of four different PVS. Nonetheless, the irradiance sensor may not be available in an EV since this type of sensor is spacious and could interfere with the photovoltaic module’s space.
Our contribution: we propose an ANN-based MPPT technique that works for any PVS composed of polycrystalline PV cells without retraining. This ability is due to the information from the PVS (datasheet) being used as input to the neural network, in addition to measurements of ambient temperature and current and voltage of the PVS. We call this MPPT technique DS-ANN (datasheet-ANN).
The DS-ANN technique is compared against two P&O MPPT techniques, outperforming both of them. We use synthetically generated data to analyze the feasibility of the proposed technique.
Although we present an approach based on EVs, the same fundamental concepts apply to all PVS, so our algorithm is not limited to EVs, but it is suitable for any MPPT application.
The remainder of the paper is organized as follows: Section 2 presents the mathematical model of a PV cell, Section 3 gives a generalized model of an EV and explains the MPPT problem, Section 4 presents the ANN model and defines the Bayesian regularization-backpropagation algorithm used for the training process, and Section 5 presents the implementation of the DS-ANN MPPT technique. The results and comparison against two P&O MPPT techniques are presented in Section 6, and finally, Section 7 concludes the paper.
2. Photovoltaic Systems
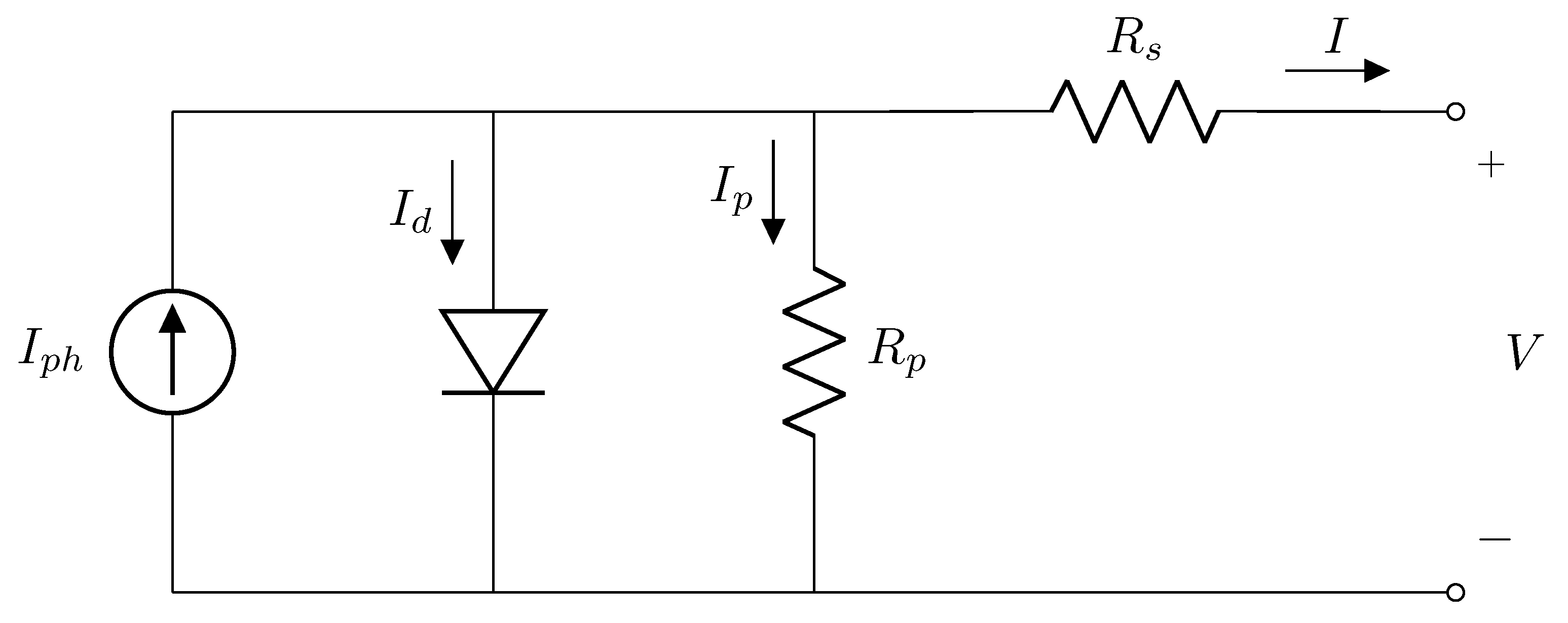
The primary device of a PVS is the PV cell. For simplicity, we use the single-diode model of a PV cell in this article, whose equivalent circuit is shown in Figure 1. This model offers a good compromise between simplicity and accuracy [68]. Equation (1) describes the single-diode model.
where I is the output current, V is the voltage at terminals, is the light-generated current (i.e., the component of cell current due to photons), is the reverse saturation current of the diode, n is the diode ideality constant, is the junction thermal voltage, is the series resistance, is the parallel resistance, T is the junction temperature (in Kelvin degrees), k is the Boltzmann constant (≈1.38064852 × 10 J/K), and q is the electron charge (≈1.60217662 × 10 C).
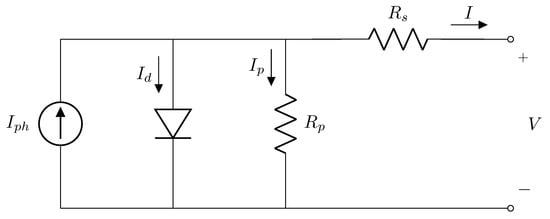
Figure 1.
The single-diode model equivalent circuit of a photovoltaic cell.
Cells may group to form panels or arrays. Cells connected in parallel increase the current, and cells connected in series provide greater output voltages. According to Gow & Manning [69], the equation for a system composed of several cells may be represented as in (2):
where , is the number of series cells, and is the number of parallel cells.
The I–V characteristic of a PVS depends on its internal characteristics (i.e., model parameters) and external influences such as irradiance and temperature.
The light-generated current of the PV cell depends linearly on the solar irradiance but is also influenced by the cell’s temperature as shown in (3) [70]:
where G is the actual irradiance on the PVS surface, is the reference irradiance (1000 ), is the reference component of cell current due to photons, is the short-circuit current/temperature coefficient, T is the cell temperature, and is the nominal temperature (298.15 K).
The diode saturation current () and its dependence on the temperature may be expressed as in (4) [71]:
where is the nominal reverse saturation current of the diode, and is the bandgap energy of the semiconductor.
As presented in Equations (2)–(4), the output current is highly nonlinear and depends, among other parameters, on the cell’s temperature. For simulations, the cell temperature can be estimated from the ambient temperature and irradiance as in (5) [72]:
where is the ambient temperature (K), and is the nominal operating cell temperature (318.15 K, generally).
3. Generalized Electric Vehicle Model
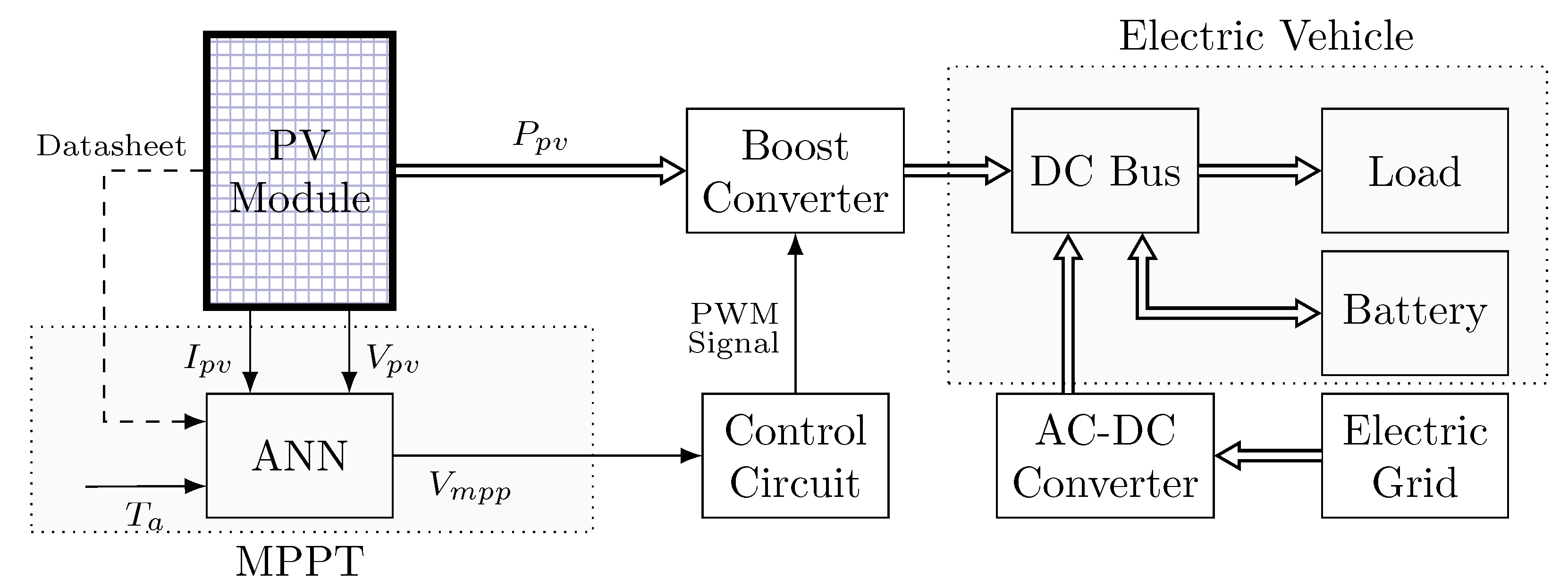
This article aims to implement an MPPT based on artificial neural networks for any PVS composed of polycrystalline silicon cells allocated on an EV. Figure 2 presents the block diagram of a generalized electric vehicle with PV generation. The system consists of a PV module, a DC-DC boost converter, an AC-DC converter, a battery, and a generic load, which accounts for all the energy consumption within the EV, such as the electric motor, the lightning, and the air conditioner system.
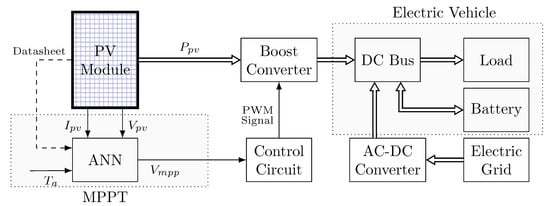
Figure 2.
Photovoltaic system with MPPT controller connected to a DC-bus in a electric vehicle.
The primary function of the battery is to store energy to satisfy the energy demand within the vehicle. Since it is not possible to meet the demand with the PV module alone, the battery needs to be recharged via the mains using the AC-DC converter [73]. Another function of the battery is to keep the DC bus voltage constant, which keeps the operating voltage of the PV module fixed [74].
The DC-DC converter function is to change the module operating voltage to ensure the operation at the MPP. If the load’s voltage remains constant, it is possible to model the converter and the load as a controlled voltage source. Thus, the relationship between the PV module voltage and the bus voltage is expressed as [75]:
where D is the converter duty cycle.
Directly from (6), the converter’s duty cycle can be determined if the optimum output voltage of the PV module is known, as follows:
The DC-DC converter design is out of the scope of this paper, but the reader can refer to five papers [76,77,78,79,80] for details.
The MPPT problem relies on finding the optimum operating voltage (), which can be estimated using the ambient temperature and the module’s voltage and current measurements, , , and , respectively [8].
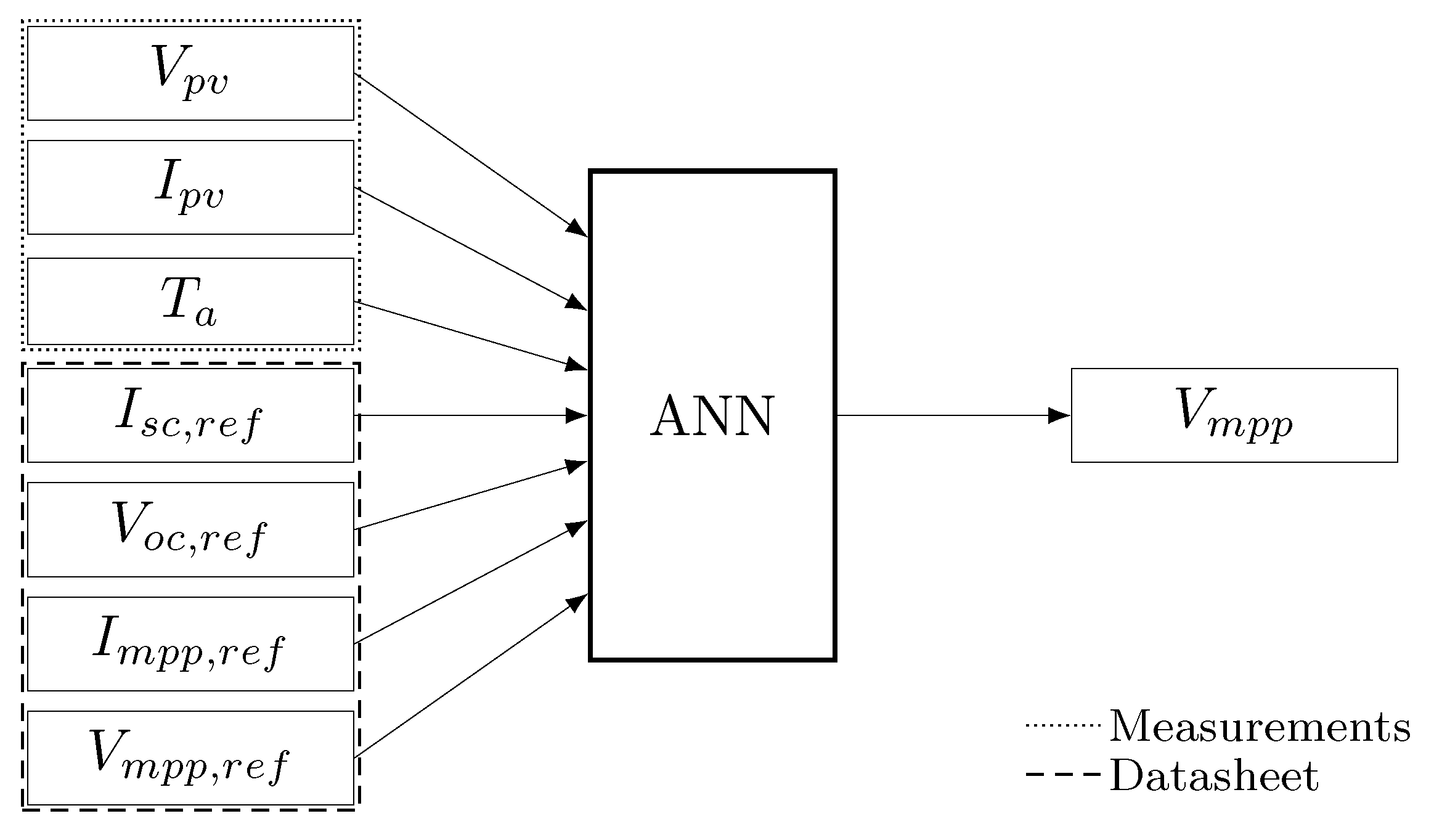
However, the electrical measurements depend on the system characteristics (i.e., datasheet information); therefore, it is necessary to use these as additional inputs to the ANN-based MPPT to differentiate between the measurements of different systems. Figure 3 shows the ANN-based MPPT diagram.
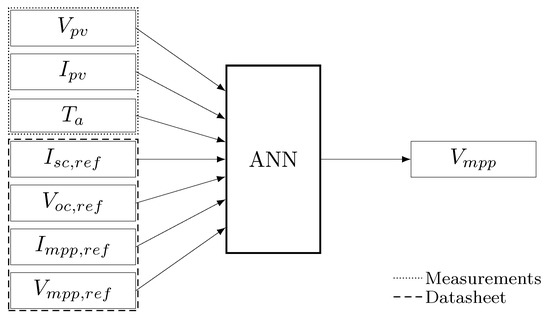
Figure 3.
ANN-based MPPT diagram.
The proposed DS-ANN MPPT technique can be used for any polycrystalline PVS without requiring retraining. This is especially important in electric vehicles, as the microcontrollers used to measure and process electrical signals have limited processing capacity [81], so training a network in these devices would not be suitable.
In DS-ANN MPPT, a workstation (e.g., a laptop) performs the training process. Once completed, the microcontroller receives and stores the network parameters (i.e., the matrices) that control the duty cycle of the DC-DC converter.
4. Artificial Neural Networks
The MPPT problem can be seen as a function approximation: we need a function that maps from system characteristics and measurements to an estimation of the MPP. As the DS-ANN MPPT must perform well on PVS for which it was not trained, the ANN must have good generalization properties. Bayesian regularization is a training algorithm designed to train networks so that they generalize well in function approximation problems [66].
Artificial neural networks are biologically inspired computational models used in various engineering fields to solve various problems such as function approximation, pattern recognition, prediction, and optimization [8]. Each ANN comprises at least three layers: an input layer, hidden layer(s), and output layer. Additionally, each layer is composed of several processors called neurons, which are interconnected by weighted links. Each neuron produces a single outgoing response by applying an activation function to the inputs’ weighted sum.
Mathematically, an artificial neural network composed of L layers (disregarding the input layer) is expressed as
where p is the input vector, W and b are the weights and biases, a is the output of the layer, f is the activation function, and j = 1, … L is the layer index. The input layer is numbered with a zero because it does not perform any processing.
During training, ANNs model the input-output relationship of a dataset by adjusting the weights to minimize the difference between the network outputs and the desired values. Once the training completes, the network can predict the output from a given input pattern.
The regularization algorithm introduces an additional term to the performance function, which restricts the weights in the network, thus avoiding overfitting [82]. This regularization algorithm is presented in Algorithm 1.
The default performance function for MLPs is mean square error (MSE), given by [66]:
where x denotes the vector containing all the weights and biases of the network, is the desired output j at input pattern i, is the corresponding network output j at input i, M is the total number of input patterns, and O is the number of outputs.
The performance function (9) is modified by adding a penalty term as follows [83]:
where and are the regularization parameters, and
represents the mean of the squared network weights, and Q is the total number of network parameters.
Note that if , the minimization of the performance function (10) will be equivalent to that of (9); hence, no regularization is performed, and smaller errors are generated. On the other hand, if , the weights’ magnitudes are reduced at the cost of larger network errors.
The Bayesian regularization-backpropagation performs the task of finding the optimum values for the and algorithm [83], which requires the computation of the Hessian matrix of . This computation is costly, so the Marquardt backpropagation (MBP) algorithm is used to approximate the Hessian as
where J is the Jacobian matrix of the errors, and the matrix identity.
The Marquardt backpropagation algorithm is presented in Algorithm 2 [84]. Note that network’s errors must be in vector form, given by
Finally, the regularization parameters can be calculated as follows:
where , and .
| Algorithm 1: Bayesian regularization [83]. |
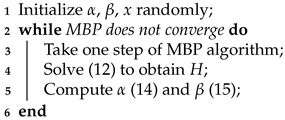 |
| Algorithm 2: Marquardt backpropagation (MBP) [84]. |
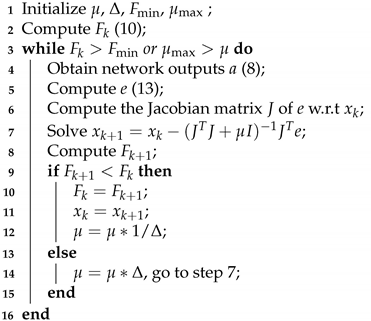 |
5. Implementation of an ANN-Based MPPT
The training data must contain different I–V curves (determined by environmental conditions) for several PVS families (determined by the electrical characteristics) to improve the ANN generalization capabilities. This data collection task is not simple since it would involve acquiring several PVS, each with the necessary sensors to collect measurements. For this reason, we decided to generate synthetic data with the following assumptions:
- The diode ideality constant is set to [85,86,87];
- The short-circuit current/temperature coefficient is set to [88];
- The bandgap energy of the semiconductor (silicon) is set to eV [71];
- The parallel resistance () is considered infinite [68];
- The number of parallel cells in the PVS is set to ;
- The number of different weather conditions for each PV family is 10 (randomly selected);
- The number of measurements in each I–V curve is 10 (randomly selected).
Note that the data generation process would not be necessary if a PVS data repository with PVS characteristics and measurements were available (similar to ImageNet, used for image classification); we hope this will be possible soon.
5.1. Data Collection and Generation
The data generation process is based on [89] and may be summarized as the sweeping of a grid formed by four variables: three of them are found in the datasheet (, , and ), and the other is a model parameter ().
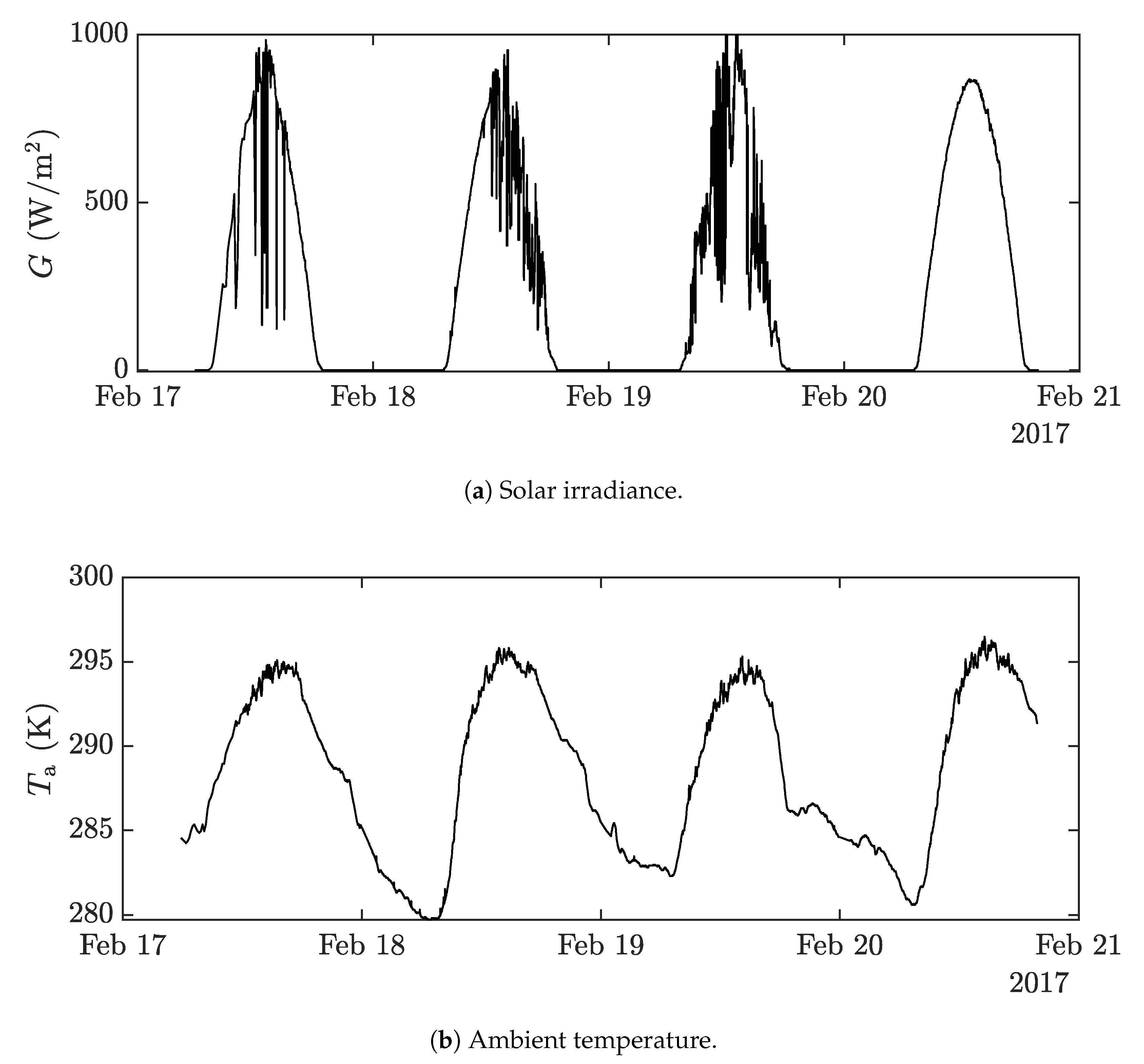
Each set of variables represents a PVS family, whose dynamics are determined by Equations (2)–(5). Note that this set of equations requires irradiance and ambient temperature values as inputs in addition to the model parameters. In this manner, real irradiance and temperature time series were used to obtain appropriate dynamics, thus avoiding the unrealistic scenarios that synthetically generated data could present. The measurements range from 1 January 2017 to 31 December 2018 and provide readings of ambient temperature and solar irradiance every 5 min. These data were collected by a weather station located at the University of Michoacan, Mexico. Figure 4 presents a subset of the weather data.
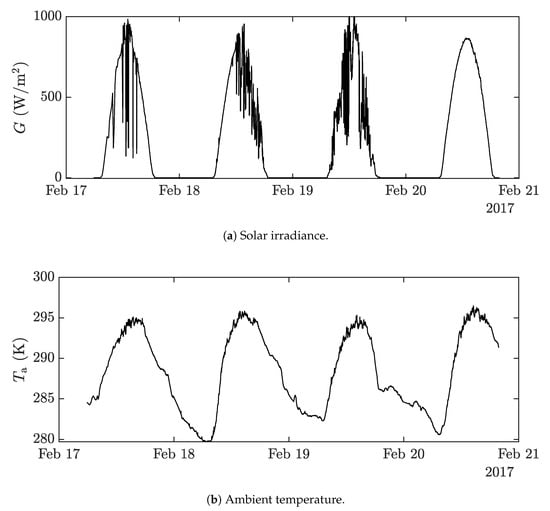
Figure 4.
Subset of weather measurements used for the training phase.
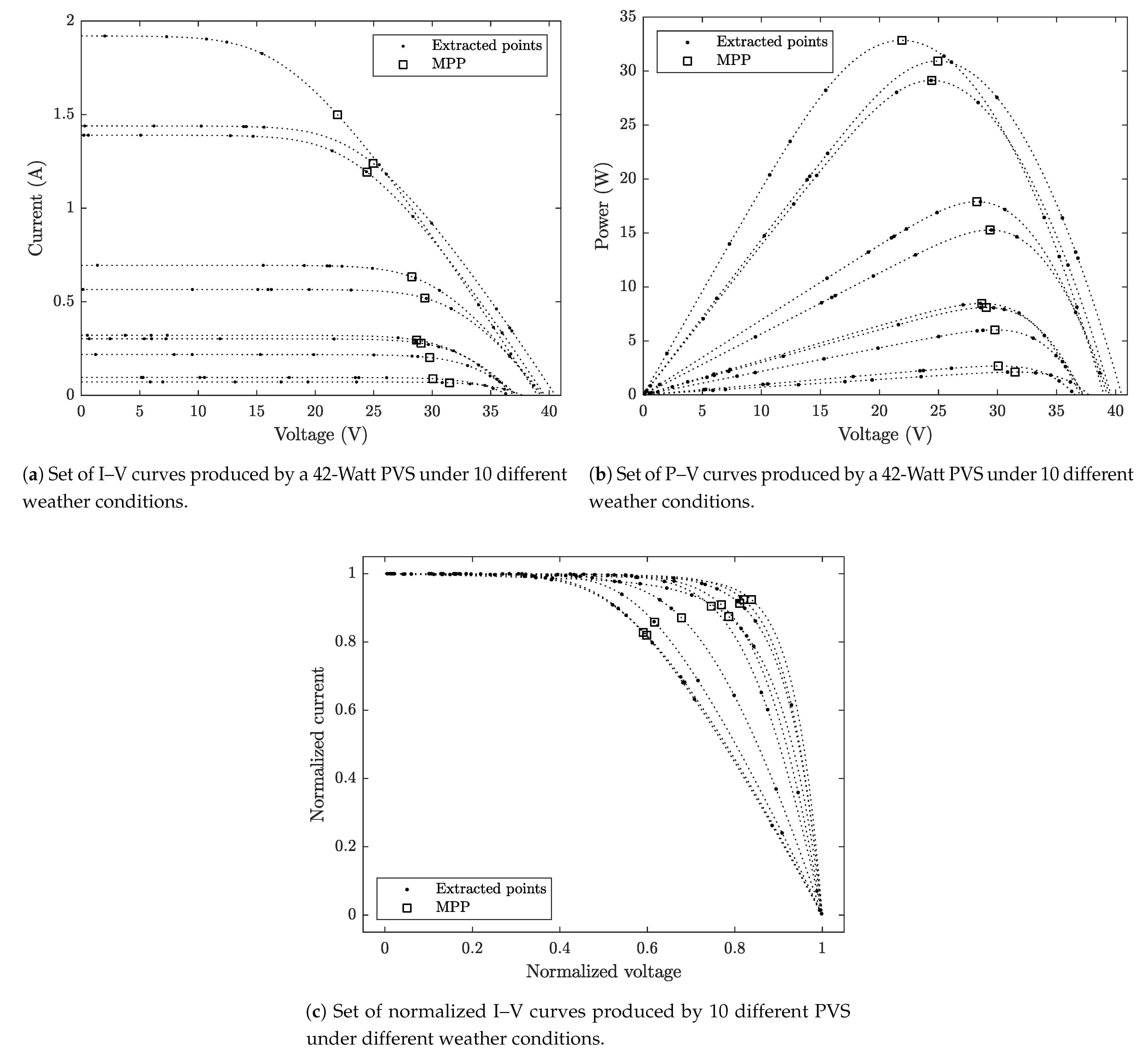
The generated training data set comprises 300,000 observations (i.e., training examples). Table 1 shows a subset of the training data. The first 100 observations of the training set correspond to a single-family under different ambient temperature and solar irradiance conditions. Figure 5a shows the I–V curves obtained for these environmental conditions and the 10 points extracted (randomly) from each one. The MPP, obtained by sweeping the curve, is also indicated. Figure 5b shows the P–V curve for the same data set; the squares denote the maximum power points for each environmental condition.

Table 1.
Subset of the generated training data set.
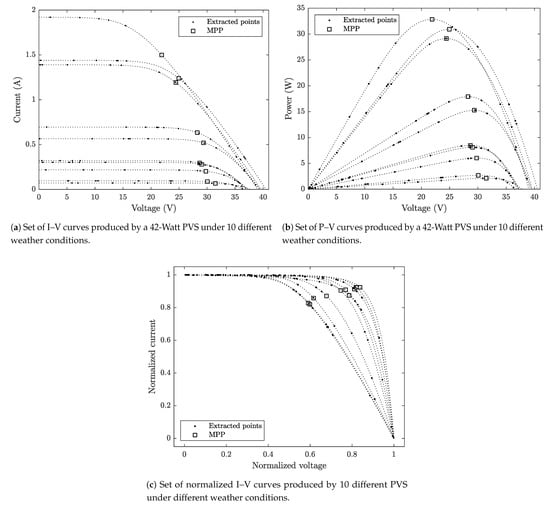
Figure 5.
Different characteristics presented in the training dataset.
Similarly, Figure 5c shows a set of I–V curves produced by the first 10 families in the database. Each family has a different voltage and current (depending on the number of series cells). Thus, the plots show normalized voltages and currents. Note that each family has a different series resistance, which produces different curve types.
5.2. Data Preprocessing
The primary purpose of the data preprocessing stage is to facilitate network training. In most cases, inputs must be scaled to adjust the different input values to a standard scale before applying them to the network. This process is of particular importance when dealing with heterogeneous inputs (i.e., inputs related to ambient temperature combined with inputs related to voltage). Furthermore, unscaled input variables can result in a slow or unstable learning process [90]. In this paper, we scale the training data in the range (−1, 1).
5.3. ANN Architecture
The most used ANN architecture for function approximation is an MLP. The typical MLP architecture for regression composes a hidden layer with sigmoid transfer functions and an output layer with linear transfer functions [66].
The most appropriate network architecture was chosen by trial and error, and it comprises two hidden layers with 30 neurons each. The number of neurons in the input and output layer is seven and one, respectively, as Figure 3 shows.
6. Results and Discussions
We present a case study to analyze the performance of the proposed DS-ANN MPPT technique, in which the original P&O and an improved P&O [91] MPPT techniques are used as the basis for comparison. The improved P&O algorithm allows toggling between two different step sizes ( and ) based on the magnitude of detected power change () to track sudden changes in irradiance quickly.
To compare the MPPT techniques’ performance, we use the tracking efficiency metric. The tracking efficiency is defined as (16) [92]:
where is the power output applying the MPPT technique, is the maximum available power, and the number of samples. The tracking efficiency indicates the percentage of power extracted by the MPPT algorithm from the maximum available power.
To obtain , we use the curve sweep method [93]. This method calculates the full I–V curve for each tuple of weather conditions and then locates the MPP by comparing each point in the curve. While this method is accurate, it is not useful in on-line applications because it forces the system to change its operating point along the curve for each environmental condition. Thus, once the weather changes, the entire process must be repeated, which yields energy losses.
All the equations and algorithms presented here were programmed using MATLAB®, while the Deep Learning ToolboxTM performed the networks’ training. The training processes were executed on a computer with two Intel Xeon E5-2650 v3 2.30 GHz processors and 32 GB RAM, using the 64-bit Windows Server 2016 Standard operating system.
Case Study
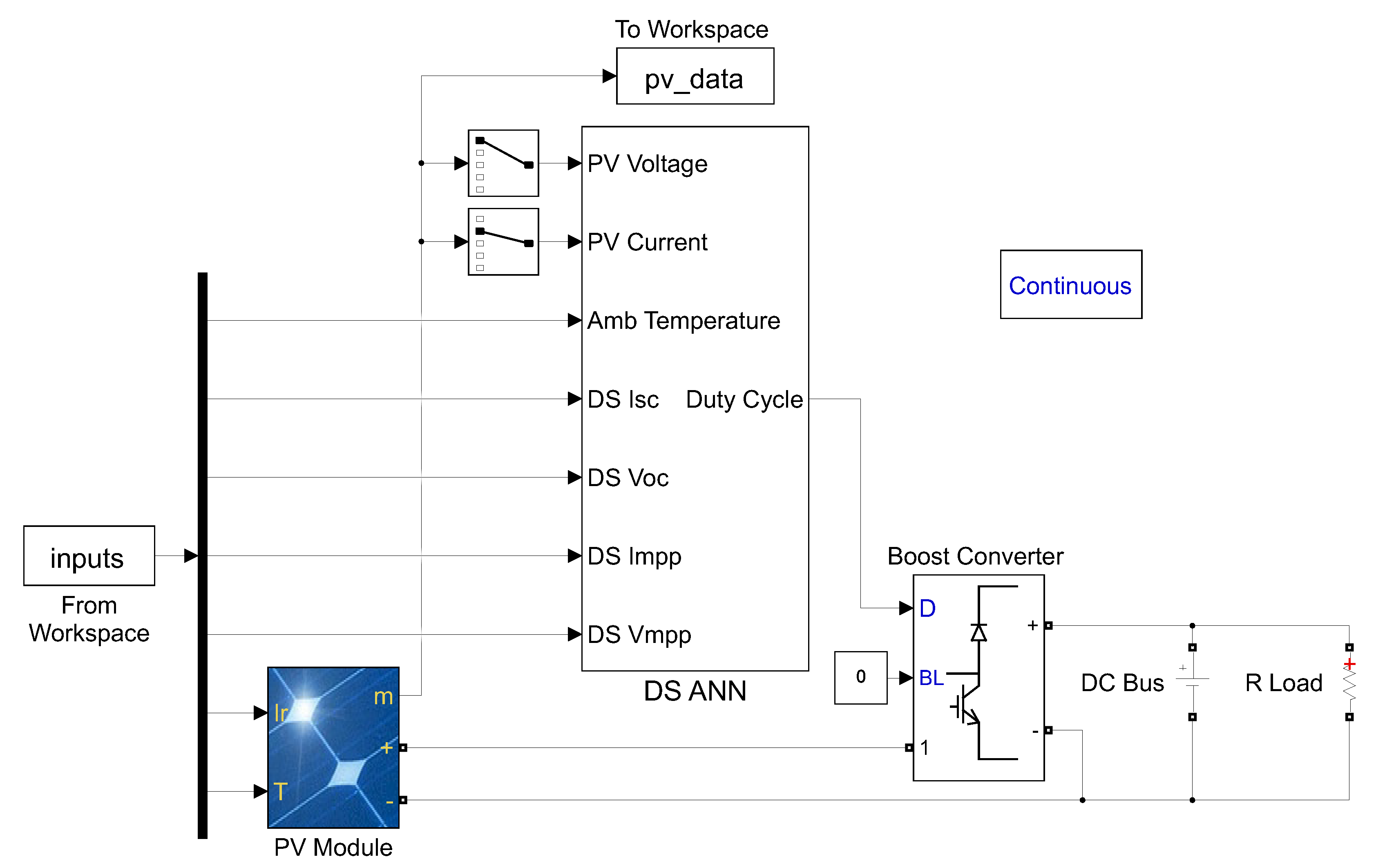
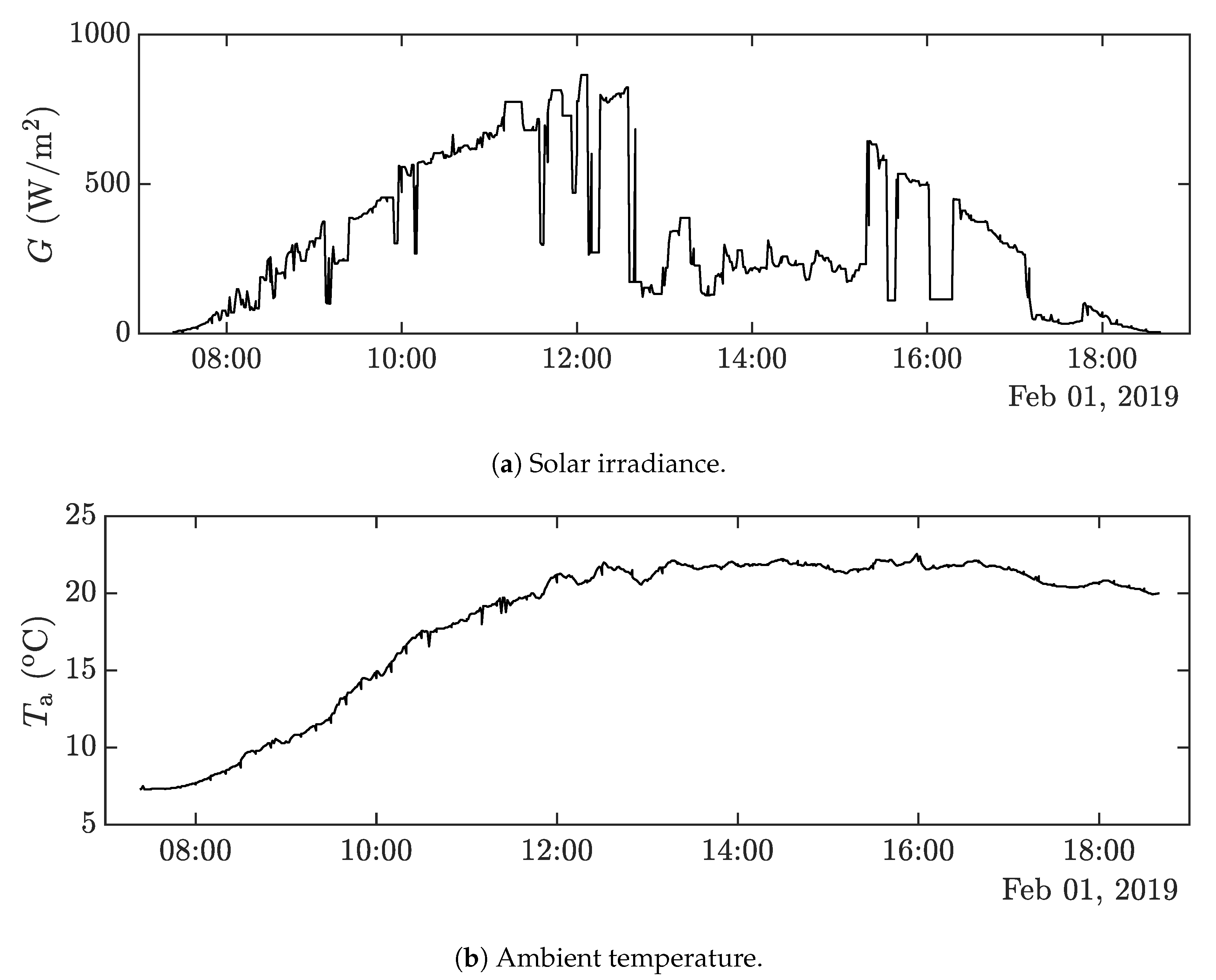
We use the SimulinkTM environment to analyze the efficiency and generalization capability of the DS-ANN with different PV modules. Figure 6 presents the model block diagram utilized to perform the simulations. We used twenty distinct PV modules, listed in Table 2, whose datasheet and dynamics are available in Simulink. The boost converter uses the average model, and conduction and switching losses are not considered. The resistance value in the load is 80 . All simulations utilize the irradiance and ambient temperature measurements for 1 February 2019 (shown in Figure 7) to elaborate a fair comparison. Note that these measurements were not presented to the ANN during the training phase.
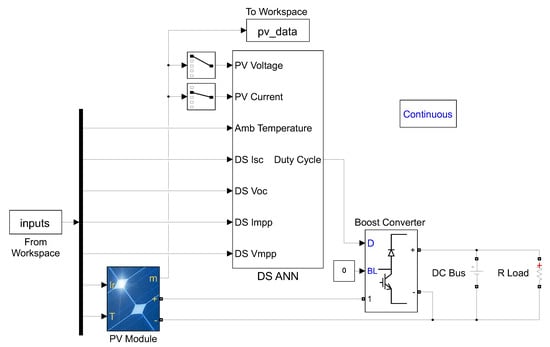
Figure 6.
Simulink model for testing the proposed DS-ANN MPPT technique.
Table 2.
Performance comparison of the different MPPT techniques for the case study.
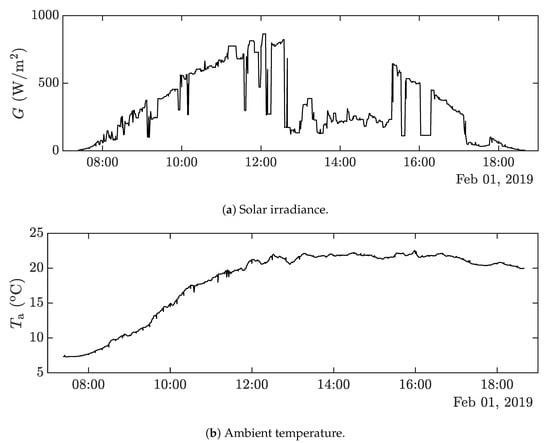
Figure 7.
Weather measurements station for the case study.
A P&O (with a fixed-step size determined by ) and a improved P&O [91] MPPT techniques (with parameters , , ) are used as the basis for comparison.
To visualize the three compared methods’ tracking dynamics, we specifically used the Kyocera Solar KC200GT module, whose datasheet is shown in Table 3. However, the results obtained in the rest of the PV modules are similar, as shown in Table 2. Note that this datasheet and the other PV modules’ datasheets were not presented to the network during the training phase.
Table 3.
Kyocera KC200GT datasheet characteristics and estimated model parameters [89].
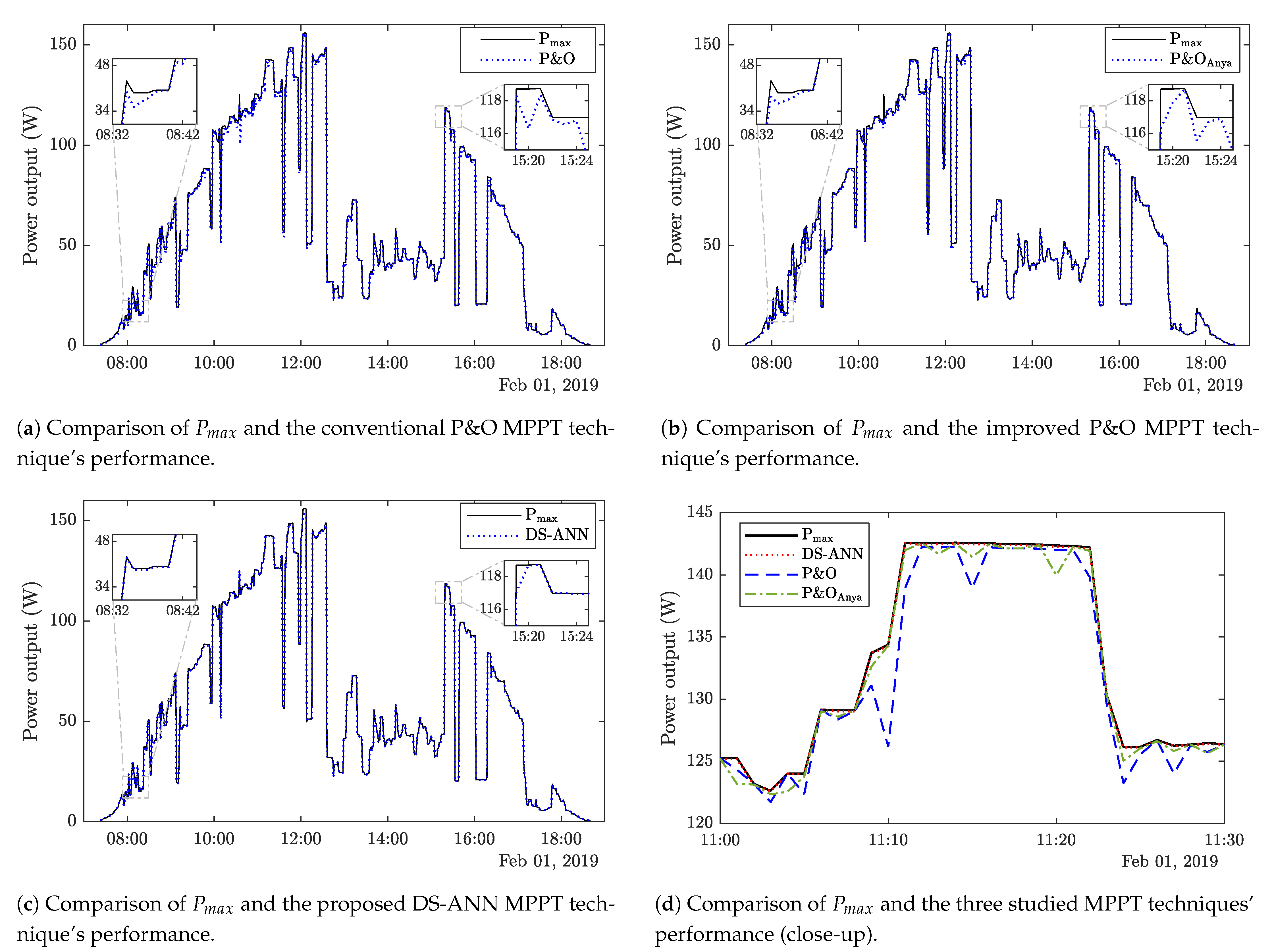
The performance results of the DS-ANN and the P&O MPPT techniques for the KC200GT module are shown in Figure 8. Figure 8a shows the P&O MPPT technique, where their oscillations in the power output and its slow tracking against sudden irradiance changes can be observed in the close-up views. The tracking efficiency is 98.19% due to power fluctuations and low tracking speed.
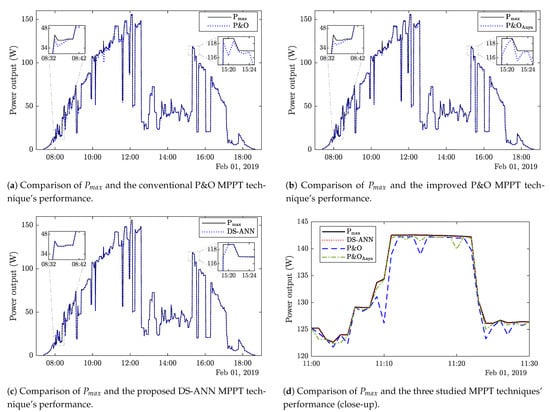
Figure 8.
MPPT techniques’ performance for the Kyocera Solar KC200GT module.
Although the method proposed by Anya et al. [91] improves the tracking speed and reduces the amplitude of the oscillations in the generated power, it does not entirely solve the problem, as Figure 8b shows. This technique’s tracking efficiency throughout the day for the KC200GT module is 98.50%, which improves the conventional P&O approach.
The DS-ANN technique solves the oscillations problem and improves the tracking speed, as shown in Figure 8c, enhancing the tracking efficiency for the KC200GT module to 99.62%. Figure 8d shows a comparison of the three MPPT techniques for the KC200GT module, where it is seen that the performance of the DS-ANN approach is better than that of the P&O methods.
Furthermore, Table 2 shows the comparison in the tracking efficiency for 20 different photovoltaic modules, where it is observed that our DS-ANN method has an average efficiency of 99.66 ± 0.20%. In contrast, the P&O methods have 98.45 ± 0.17% and 98.06 ± 0.16% efficiencies for the improved and the conventional P&O. These results highlight the great utility of the proposed DS-ANN technique for MPP tracking in EV applications, where reducing the energy loss by improving the tracking efficiency enhances the EV’s autonomy and hence lessens its emissions.
7. Conclusions
We discussed the application of an ANN as an MPPT technique (DS-ANN) whose required inputs are the ambient temperature, PV module’s voltage and current measurements, and its datasheet information. The latter allows the utilization of the MPPT technique on different PVS without the need for retraining.
The response of 20 different PV modules was simulated using irradiance and temperature measurements to verify the DS-ANN MPPT method’s performance. These modules’ information was not presented in the training set to demonstrate the ANN’s generalization capability.
The results of the simulations show the performance improvement of the proposed DS-ANN technique concerning two P&O MPPT techniques. The DS-ANN technique can track the sudden irradiance changes, which yields a better tracking efficiency and increases the generated energy, making it a reliable MPPT technique for any EV with integrated PV generation.
Author Contributions
Conceptualization, B.C.; methodology, B.C., R.T., and J.J.F.; software, B.C.; validation, B.C., R.T., and J.J.F.; investigation, B.C.; resources, B.C. and R.T.; data curation, B.C.; writing—original draft preparation, B.C.; writing—review and editing, B.C., R.T., and J.J.F.; visualization, B.C.; supervision, R.T. and J.J.F.; project administration, R.T. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are openly available at https://github.com/balcortex/ev_mppt, accessed on 4 August 2021.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| ANN | Artificial neural network |
| EV | Electric vehicle |
| DS-ANN | Datasheet ANN (proposed MPPT technique) |
| Semiconductor bandgap energy (eV) | |
| G | Solar irradiance () |
| Solar irradiance at STC () | |
| I | PVS output current (A) |
| Diode reverse saturation current (A) | |
| Diode reverse saturation current at STC (A) | |
| Current value at the maximum power point (A) | |
| Current value at the maximum power point at STC (A) | |
| Light-generated current (A) | |
| Light-generated current at STC (A) | |
| Short-circuit current (A) | |
| Short-circuit current at STC (A) | |
| k | Boltzmann constant (≈ J/K) |
| MLP | Multi-layer perceptron |
| MPP | Maximum power point |
| MPPT | Maximum power point tracking |
| Short-circuit current/temperature coefficient (A/K) | |
| MPPT efficiency (%) | |
| n | Diode ideality constant |
| Number of parallel PV cells in the PVS | |
| Number of series PV cells in the PVS | |
| NOCT | Nominal operating cell temperature (K) |
| P | PVS output power (W) |
| PVS maximum available output power (W) | |
| PVS maximum output power at STC (W) |
| P&O | Perturb and observe |
| PV | Photovoltaic |
| PVS | Photovoltaic system |
| q | Electron charge (≈ C) |
| Parallel resistance () | |
| Series resistance () | |
| STC | Standard test conditions |
| T | PVS temperature (K) |
| Ambient temperature (K) | |
| PVS temperature at STC (K) | |
| V | PVS output voltage (V) |
| Voltage value at the maximum power point (V) | |
| Voltage value at the maximum power point at STC (V) | |
| Open-circuit voltage (V) | |
| Open-circuit voltage at STC (V) | |
| Junction thermal voltage (V) |
References
- Weissburg, M.; Draper, A.M. Impacts of Global Warming and Elevated CO2 on Sensory Behavior in Predator-Prey Interactions: A Review and Synthesis. Front. Ecol. Evol. 2019, 7, 72. [Google Scholar]
- Evans, G.W. Projected Behavioral Impacts of Global Climate Change. Annu. Rev. Psychol. 2019, 70, 449–474. [Google Scholar] [CrossRef]
- Mikkelsen, T.N.; Beier, C.; Jonasson, S.; Holmstrup, M.; Schmidt, I.K.; Ambus, P.; Pilegaard, K.; Michelsen, A.; Albert, K.; Andresen, L.C.; et al. Experimental design of multifactor climate change experiments with elevated CO2, warming and drought: The CLIMAITE project. Funct. Ecol. 2008, 22, 185–195. [Google Scholar] [CrossRef]
- Reyes-Belmonte, M.A. Quo Vadis Solar Energy Research? Appl. Sci. 2021, 11, 3015. [Google Scholar] [CrossRef]
- Capuano, L. Annual Energy Outlook 2019. 2019. Available online: https://www.eia.gov/pressroom/presentations/Capuano_01242019.pdf (accessed on 24 July 2019).
- Wang, D.; Zamel, N.; Jiao, K.; Zhou, Y.; Yu, S.; Du, Q.; Yin, Y. Life cycle analysis of internal combustion engine, electric and fuel cell vehicles for China. Energy 2013, 59, 402–412. [Google Scholar] [CrossRef]
- Dong, X.; Wang, B.; Yip, H.L.; Chan, Q.N. CO2 Emission of Electric and Gasoline Vehicles under Various Road Conditions for China, Japan, Europe and World Average—Prediction through Year 2040. Appl. Sci. 2019, 9, 2295. [Google Scholar] [CrossRef] [Green Version]
- Allahabadi, S.; Iman-Eini, H.; Farhangi, S. Neural Network based Maximum Power Point Tracking Technique for PV Arrays in Mobile Applications. In Proceedings of the 2019 10th International Power Electronics, Drive Systems and Technologies Conference (PEDSTC), Shiraz, Iran, 12–14 February 2019; pp. 701–706. [Google Scholar] [CrossRef]
- Araki, K.; Ota, Y.; Yamaguchi, M. Measurement and Modeling of 3D Solar Irradiance for Vehicle-Integrated Photovoltaic. Appl. Sci. 2020, 10, 872. [Google Scholar] [CrossRef] [Green Version]
- Heinrich, M.; Kutter, C.; Basler, F.; Mittag, M.; Alanis, L.E.; Eberlein, D.; Schmid, A.; Reise, C.; Kroyer, T.; Neuhaus, D.H.; et al. Potential and Challenges of Vehicle Integrated Photovoltaics for Passenger Cars. In Proceedings of the 37th European PV Solar Energy Conference and Exhibition, Lisbon, Portugal, 7–11 September 2020; Volume 7, p. 11. [Google Scholar]
- An, T. Study of a New Type of Electric Car: Solar-Powered Car. IOP Conf. Ser. Earth Environ. Sci. 2021, 631, 012118. [Google Scholar] [CrossRef]
- Mathijsen, D. The role of composites in getting the solar car to our driveways: Lightyear one. Reinf. Plast. 2021. [Google Scholar] [CrossRef]
- Harrag, A.; Messalti, S. IC-based Variable Step Size Neuro-Fuzzy MPPT Improving PV System Performances. Energy Procedia 2019, 157, 362–374. [Google Scholar] [CrossRef]
- Chtouki, I.; Wira, P.; Zazi, M.; Collicchio, B.; Meddour, S. Design, implementation and comparison of several neural perturb and observe MPPT methods for photovoltaic systems. Int. J. Renew. Energy Res. 2019, 9, 757–770. [Google Scholar]
- Veerachary, M.; Senjyu, T.; Uezato, K. Maximum power point tracking control of IDB converter supplied PV system. IEE Proc. Electr. Power Appl. 2001, 148, 494–502. [Google Scholar] [CrossRef]
- Ahmad, R.; Murtaza, A.F.; Sher, H.A. Power tracking techniques for efficient operation of photovoltaic array in solar applications—A review. Renew. Sustain. Energy Rev. 2019, 101, 82–102. [Google Scholar] [CrossRef]
- Danandeh, M. Comparative and comprehensive review of maximum power point tracking methods for PV cells. Renew. Sustain. Energy Rev. 2018, 82, 2743–2767. [Google Scholar] [CrossRef]
- Gupta, A.; Chauhan, Y.K.; Pachauri, R.K. A comparative investigation of maximum power point tracking methods for solar PV system. Sol. Energy 2016, 136, 236–253. [Google Scholar] [CrossRef]
- Karami, N.; Moubayed, N.; Outbib, R. General review and classification of different MPPT Techniques. Renew. Sustain. Energy Rev. 2017, 68, 1–18. [Google Scholar] [CrossRef]
- Khan, M.J.; Mathew, L. Comparative study of maximum power point tracking techniques for hybrid renewable energy system. Int. J. Electron. 2019, 106, 1216–1228. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Sera, D.; Mathe, L.; Kerekes, T.; Spataru, S.V.; Teodorescu, R. On the Perturb-and-Observe and Incremental Conductance MPPT Methods for PV Systems. IEEE J. Photovolt. 2013, 3, 1070–1078. [Google Scholar] [CrossRef]
- Nedumgatt, J.J.; Jayakrishnan, K.B.; Umashankar, S.; Vijayakumar, D.; Kothari, D.P. Perturb and observe MPPT algorithm for solar PV systems-modeling and simulation. In Proceedings of the 2011 Annual IEEE India Conference, Hyderabad, India, 16–18 December 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Lauss, G. The performance of perturb and observe and incremental conductance maximum power point tracking method under dynamic weather conditions. Appl. Energy 2014, 119, 228–236. [Google Scholar] [CrossRef]
- Aashoor, F.A.O.; Robinson, F.V.P. A variable step size perturb and observe algorithm for photovoltaic maximum power point tracking. In Proceedings of the 2012 47th International Universities Power Engineering Conference (UPEC), Uxbridge, UK, 4–7 September 2012; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Salam, M.; El-Mohandes, M.T.; Goda, M. An improved perturb-and-observe based MPPT method for PV systems under varying irradiation levels. Sol. Energy 2018, 171, 547–561. [Google Scholar] [CrossRef]
- Bendib, B.; Belmili, H.; Krim, F. A survey of the most used MPPT methods: Conventional and advanced algorithms applied for photovoltaic systems. Renew. Sustain. Energy Rev. 2015, 45, 637–648. [Google Scholar] [CrossRef]
- Ahmed, J.; Salam, Z. An improved perturb and observe (P&O) maximum power point tracking (MPPT) algorithm for higher efficiency. Appl. Energy 2015, 150, 97–108. [Google Scholar] [CrossRef]
- Bechouat, M.; Sedraoui, M.; Feraga, C.E.; Aidoud, M.; Kahla, S. Modeling and Fuzzy MPPT Controller Design for Photovoltaic Module Equipped with a Closed-Loop Cooling System. J. Electron. Mater. 2019, 48, 5471–5480. [Google Scholar] [CrossRef]
- Li, X.; Wen, H.; Hu, Y.; Jiang, L. A novel beta parameter based fuzzy-logic controller for photovoltaic MPPT application. Renew. Energy 2019, 130, 416–427. [Google Scholar] [CrossRef]
- Farajdadian, S.; Hosseini, S.H. Design of an optimal fuzzy controller to obtain maximum power in solar power generation system. Sol. Energy 2019, 182, 161–178. [Google Scholar] [CrossRef]
- Zainuri, M.A.A.M.; Radzi, M.A.M.; Rahman, N.F.A. Photovoltaic Boost DC/DC Converter for Power Led with Adaptive P&O-Fuzzy Maximum Power Point Tracking. In 10th International Conference on Robotics, Vision, Signal Processing and Power Applications; Zawawi, M.A.M., Teoh, S.S., Abdullah, N.B., Mohd Sazali, M.I.S., Eds.; Springer: Singapore, 2019; pp. 245–251. [Google Scholar]
- Sahoo, S.K.; Balamurugan, M.; Mishra, P.K.; Mishra, K.K.; Meher, M.R. A Robust Accelerated PSO MPPT for Photovoltaic System. In Soft Computing for Problem Solving; Bansal, J.C., Das, K.N., Nagar, A., Deep, K., Ojha, A.K., Eds.; Springer: Singapore, 2019; pp. 277–288. [Google Scholar]
- Harrag, A.; Messalti, S. PSO-based SMC variable step size P&O MPPT controller for PV systems under fast changing atmospheric conditions. Int. J. Numer. Model. Electron. Netw. Devices Fields 2019, 32, e2603. [Google Scholar] [CrossRef]
- Yang, B.; Zhong, L.; Zhang, X.; Shu, H.; Yu, T.; Li, H.; Jiang, L.; Sun, L. Novel bio-inspired memetic salp swarm algorithm and application to MPPT for PV systems considering partial shading condition. J. Clean. Prod. 2019, 215, 1203–1222. [Google Scholar] [CrossRef]
- Bahrami, M.; Gavagsaz-Ghoachani, R.; Zandi, M.; Phattanasak, M.; Maranzanaa, G.; Nahid-Mobarakeh, B.; Pierfederici, S.; Meibody-Tabar, F. Hybrid maximum power point tracking algorithm with improved dynamic performance. Renew. Energy 2019, 130, 982–991. [Google Scholar] [CrossRef]
- Batarseh, M.G.; Za’ter, M.E. Hybrid maximum power point tracking techniques: A comparative survey, suggested classification and uninvestigated combinations. Sol. Energy 2018, 169, 535–555. [Google Scholar] [CrossRef]
- Çelik, Ö.; Teke, A. A Hybrid MPPT method for grid connected photovoltaic systems under rapidly changing atmospheric conditions. Electr. Power Syst. Res. 2017, 152, 194–210. [Google Scholar] [CrossRef]
- Farhat, M.; Barambones, O.; Sbita, L. A new maximum power point method based on a sliding mode approach for solar energy harvesting. Appl. Energy 2017, 185, 1185–1198. [Google Scholar] [CrossRef]
- Ghamrawi, A.; Gaubert, J.P.; Mehdi, D. A new dual-mode maximum power point tracking algorithm based on the Perturb and Observe algorithm used on solar energy system. Sol. Energy 2018, 174, 508–514. [Google Scholar] [CrossRef]
- Martin, A.D.; Vazquez, J.R.; Cano, J. MPPT in PV systems under partial shading conditions using artificial vision. Electr. Power Syst. Res. 2018, 162, 89–98. [Google Scholar] [CrossRef]
- Moshksar, E.; Ghanbari, T. A model-based algorithm for maximum power point tracking of PV systems using exact analytical solution of single-diode equivalent model. Sol. Energy 2018, 162, 117–131. [Google Scholar] [CrossRef]
- Elobaid, L.M.; Abdelsalam, A.K.; Zakzouk, E.E. Artificial neural network-based photovoltaic maximum power point tracking techniques: A survey. IET Renew. Power Gener. 2015, 9, 1043–1063. [Google Scholar] [CrossRef]
- Ruchira; Patel, R.N.; Sinha, S.K. Comparison of ANN-Based MPPT Controller and Incremental Conductance for Photovoltaic System. In Proceeding of the Second International Conference on Microelectronics, Computing & Communication Systems (MCCS 2017); Nath, V., Mandal, J.K., Eds.; Springer: Singapore, 2019; pp. 295–305. [Google Scholar]
- Manohar, M.; Koley, E.; Ghosh, S. An Efficient MPPT and Reliable Protection Scheme for PV-Integrated Microgrid under Partial Shading and Array Faults. In Modern Maximum Power Point Tracking Techniques for Photovoltaic Energy Systems; Springer International Publishing: Cham, Switzerland, 2020; pp. 303–329. [Google Scholar] [CrossRef]
- Triki, Y.; Bechouche, A.; Seddiki, H.; Abdeslam, D.O. ADALINE Based MPPT With Indirect Control Mode for Photovoltaic Systems. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 2183–2188. [Google Scholar] [CrossRef]
- Touil, S.A.; Boudjerda, N.; Boubakir, A.; El Khamlichi Drissi, K. A sliding mode control and artificial neural network based MPPT for a direct grid-connected photovoltaic source. Asian J. Control 2019, 21, 1892–1905. [Google Scholar] [CrossRef]
- Annaraja, K.; Sundaram, S.S.; Selvaperumal, S.; Prabhakar, G. ANN-based Maximum Power Point Tracking for a Large Photovoltaic Farm Through Wireless Sensor Networks. Curr. Signal Transduct. Ther. 2019, 14, 38–48. [Google Scholar] [CrossRef]
- Chang, S.; Wang, Q.; Hu, H.; Ding, Z.; Guo, H. An NNwC MPPT-Based Energy Supply Solution for Sensor Nodes in Buildings and Its Feasibility Study. Energies 2019, 12, 101. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, C.C.; Cherkaoui, M.; Mokhlis, M. MPPT Control for Photovoltaic System using hybrid method under variant weather condition. In Proceedings of the 2019 International Conference on Wireless Technologies, Embedded and Intelligent Systems (WITS), Fez, Morocco, 3–4 April 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Chtouki, I.; Wira, P.; Zazi, M. Comparison of several neural network perturb and observe MPPT methods for photovoltaic applications. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 20–22 February 2018; pp. 909–914. [Google Scholar] [CrossRef]
- Farh, H.M.; Eltamaly, A.M.; Ibrahim, A.B.; Othman, M.F.; Al-Saud, M.S. Dynamic global power extraction from partially shaded photovoltaic using deep recurrent neural network and improved PSO techniques. Int. Trans. Electr. Energy Syst. 2019, 29, e12061. [Google Scholar] [CrossRef]
- El-Helw, H.M.; Magdy, A.; Marei, M.I. A Hybrid Maximum Power Point Tracking Technique for Partially Shaded Photovoltaic Arrays. IEEE Access 2017, 5, 11900–11908. [Google Scholar] [CrossRef]
- Kidziǹski, Ł.; Delp, S.; Schwartz, M. Automatic real-time gait event detection in children using deep neural networks. PLoS ONE 2019, 14, e0211466. [Google Scholar] [CrossRef] [Green Version]
- Köpüklü, O.; Gunduz, A.; Kose, N.; Rigoll, G. Real-time Hand Gesture Detection and Classification Using Convolutional Neural Networks. In Proceedings of the 2019 14th IEEE International Conference on Automatic Face & Gesture Recognition (FG 2019), Lille, France, 14–18 May 2019. [Google Scholar]
- Eslami, E.; Choi, Y.; Lops, Y.; Sayeed, A. A real-time hourly ozone prediction system using deep convolutional neural network. Neural Comput. Appl. 2019, 32, 8783–8797. [Google Scholar] [CrossRef] [Green Version]
- Gupta, T.K.; Raza, K. Chapter 7-Optimization of ANN Architecture: A Review on Nature-Inspired Techniques. In Machine Learning in Bio-Signal Analysis and Diagnostic Imaging; Dey, N., Borra, S., Ashour, A.S., Shi, F., Eds.; Academic Press: Cambridge, MA, USA, 2019; pp. 159–182. [Google Scholar] [CrossRef]
- Gastli, A.; Ben-Brahim, L.; Rhouma, M.B.H. ANN-based extraction approach of PV cell equivalent circuit parameters. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–10. [Google Scholar] [CrossRef]
- Viebke, A.; Memeti, S.; Pllana, S.; Abraham, A. CHAOS: A parallelization scheme for training convolutional neural networks on Intel Xeon Phi. J. Supercomput. 2019, 75, 197–227. [Google Scholar] [CrossRef] [Green Version]
- Kumar, Y.; Kaul, S.; Sood, K. Effective Use of the Machine Learning Approaches on Different Clouds. In Proceedings of the International Conference on Sustainable Computing in Science, Technology and Management (SUSCOM), Jaipur, India, 26–28 February 2019. [Google Scholar]
- Ignacio, A.B.; Luis Alberto, M.R.; Carlos Arturo, H.G.; Juan Crescenciano, C.V.; Daniel, P.B.; Miguel, M.S. Real time FPGA-ANN architecture for outdoor obstacle detection focused in road safety. J. Intell. Fuzzy Syst. 2019, 36, 4425–4436. [Google Scholar]
- Zarrad, O.; Hajjaji, M.A.; Jemaa, A.; Mansouri, M.N. Sizing Control and Hardware Implementation of a Hybrid Wind-Solar Power System, Based on an ANN Approach, for Pumping Water. Int. J. Photoenergy 2019, 2019. [Google Scholar] [CrossRef]
- Küçüktopcu, O.; Masazade, E.; Ünsalan, C.; Varshney, P.K. A real-time bird sound recognition system using a low-cost microcontroller. Appl. Acoust. 2019, 148, 194–201. [Google Scholar] [CrossRef]
- Cerutti, G.; Prasad, R.; Farella, E. Convolutional Neural Network on Embedded Platform for People Presence Detection in Low Resolution Thermal Images. In Proceedings of the ICASSP 2019–2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 7610–7614. [Google Scholar] [CrossRef]
- Bogoslovskii, I.A.; Ermolenko, D.V.; Stepanov, A.B.; Kilicheva, K.K.; Pomogalova, A.V. Implementation of Universal Neural Network Approximator on a ULP Microcontroller for Wavelet Synthesis in Electroencephalography. In Proceedings of the 2019 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), Saint Petersburg and Moscow, Russia, 28–31 January 2019; pp. 1146–1151. [Google Scholar] [CrossRef]
- Hagan, M.T.; Demuth, H.B.; Beale, M.H. Neural Network Design, 2nd ed.; Martin Hagan: Stillwater, OK, USA, 2014. [Google Scholar]
- Natsheh, E.M.; Natsheh, A.R.; Albarbar, A. Intelligent controller for managing power flow within standalone hybrid power systems. IET Sci. Meas. Technol. 2013, 7, 191–200. [Google Scholar] [CrossRef]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Comprehensive Approach to Modeling and Simulation of Photovoltaic Arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Gow, J.A.; Manning, C.D. Development of a photovoltaic array model for use in power-electronics simulation studies. IEE Proc. Electr. Power Appl. 1999, 146, 193–200. [Google Scholar] [CrossRef]
- Duffie, J.A.; Beckman, W.A.; Worek, W. Solar Engineering of Thermal Processes, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013. [Google Scholar]
- Chenni, R.; Makhlouf, M.; Kerbache, T.; Bouzid, A. A detailed modeling method for photovoltaic cells. Energy 2007, 32, 1724–1730. [Google Scholar] [CrossRef]
- Messenger, R.A.; Ventre, J. Photovoltaic Systems Engineering; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Sarigiannidis, A.G.; Stathis, S.A.; Kladas, A.G. Performance evaluation of MPPT techniques for PV array incorporated into Electric Vehicle roof. In Proceedings of the 2015 International Conference on Renewable Energy Research and Applications (ICRERA), Palermo, Italy, 22–25 November 2015; pp. 1069–1073. [Google Scholar] [CrossRef]
- Satpathy, P.R.; Mahmoud, A.; Panigarhi, S.K.; Sharma, R. Partial Shading Effect on the Performance of Electric Vehicle-Integrated Solar PV System. In Advances in Energy Technology; Mahapatra, S., Shahbaz, M., Vaccaro, A., Emilia Balas, V., Eds.; Springer: Singapore, 2021; pp. 169–178. [Google Scholar]
- Coelho, R.F.; dos Santos, W.M.; Martins, D.C. Influence of power converters on PV maximum power point tracking efficiency. In Proceedings of the 2012 10th IEEE/IAS International Conference on Industry Applications, Fortaleza, Brazil, 5–7 November 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Ba, A.; Ehssein, C.O.; Mahmoud, M.E.M.O.M.; Hamdoun, O.; Elhassen, A. Comparative Study of Different DC/DC Power Converter for Optimal PV System Using MPPT (P&O) Method. Appl. Sol. Energy 2018, 54, 235–245. [Google Scholar] [CrossRef]
- Salman, S.; Ai, X.; Wu, Z. Design of a P&O algorithm based MPPT charge controller for a stand-alone 200W PV system. Prot. Control Mod. Power Syst. 2018, 3, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Sundararaj, V.; Anoop, V.; Dixit, P.; Arjaria, A.; Chourasia, U.; Bhambri, P.; MR, R.; Sundararaj, R. CCGPA-MPPT: Cauchy preferential crossover-based global pollination algorithm for MPPT in photovoltaic system. Prog. Photovolt. Res. Appl. 2020, 28, 1128–1145. [Google Scholar] [CrossRef]
- Khan, R.; Khan, L.; Ullah, S.; Sami, I.; Ro, J.S. Backstepping Based Super-Twisting Sliding Mode MPPT Control with Differential Flatness Oriented Observer Design for Photovoltaic System. Electronics 2020, 9, 1543. [Google Scholar] [CrossRef]
- Abuzairi, T.; Ramadhan, W.W.A.; Devara, K. Solar Charge Controller with Maximum Power Point Tracking for Low-Power Solar Applications. Int. J. Photoenergy 2019, 2019, 5026464. [Google Scholar] [CrossRef]
- Manivannan, S.; Kaleeswaran, E. Solar powered electric vehicle. In Proceedings of the 2016 First International Conference on Sustainable Green Buildings and Communities (SGBC), Chennai, India, 18–20 December 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Gouravaraju, S.; Narayan, J.; Sauer, R.A.; Gautam, S.S. A Bayesian regularization-backpropagation neural network model for peeling computations. arXiv 2020, arXiv:2006.16409. [Google Scholar]
- Dan Foresee, F.; Hagan, M.T. Gauss-Newton approximation to Bayesian learning. In Proceedings of the International Conference on Neural Networks (ICNN’97), Houston, TX, USA, 12 June 1997; Volume 3, pp. 1930–1935. [Google Scholar] [CrossRef]
- Hagan, M.T.; Menhaj, M.B. Training feedforward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef] [PubMed]
- Laudani, A.; Fulginei, F.R.; Salvini, A. Identification of the one-diode model for photovoltaic modules from datasheet values. Sol. Energy 2014, 108, 432–446. [Google Scholar] [CrossRef]
- Nishioka, K.; Sakitani, N.; Uraoka, Y.; Fuyuki, T. Analysis of multicrystalline silicon solar cells by modified 3-diode equivalent circuit model taking leakage current through periphery into consideration. Sol. Energy Mater. Sol. Cells 2007, 91, 1222–1227. [Google Scholar] [CrossRef]
- Tsai, H.L.; Tu, C.S.; Su, Y.J. Development of generalized photovoltaic model using MATLAB/SIMULINK. In Proceedings of the World Congress on Engineering and Computer Science, San Francisco, CA, USA, 22–24 October 2008; Volume 2008, pp. 1–6. [Google Scholar]
- Samal, A.; Mohanty, A.; Ray, P.; Mohanty, S.; Mohanty, P. Implementation of digital temperature control system on photovoltaic cell model: An experimental analysis. Optik 2019, 176, 324–333. [Google Scholar] [CrossRef]
- Cortés, B.; Sánchez, R.T.; Flores, J.J. Characterization of a polycrystalline photovoltaic cell using artificial neural networks. Sol. Energy 2020, 196, 157–167. [Google Scholar] [CrossRef]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. arXiv 2015, arXiv:cs.LG/1502.03167. [Google Scholar]
- Anya, I.F.; Saha, C.; Ahmed, H.; Huda, M.N.; Rajbhandari, S. Performance Improvement of Perturb and Observe Maximum Power Point Tracking Technique for Solar PV Applications. In Modern Maximum Power Point Tracking Techniques for Photovoltaic Energy Systems; Eltamaly, A.M., Abdelaziz, A.Y., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 283–301. [Google Scholar] [CrossRef]
- Peng, L.; Zheng, S.; Chai, X.; Li, L. A novel tangent error maximum power point tracking algorithm for photovoltaic system under fast multi-changing solar irradiances. Appl. Energy 2018, 210, 303–316. [Google Scholar] [CrossRef]
- Mastromauro, R.A.; Liserre, M.; Dell’Aquila, A. Control Issues in Single-Stage Photovoltaic Systems: MPPT, Current and Voltage Control. IEEE Trans. Ind. Inform. 2012, 8, 241–254. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).