
Research on Energy Transmission Mechanism of the Electro-Hydraulic Servo Pump Control System

Abstract
:1. Introduction
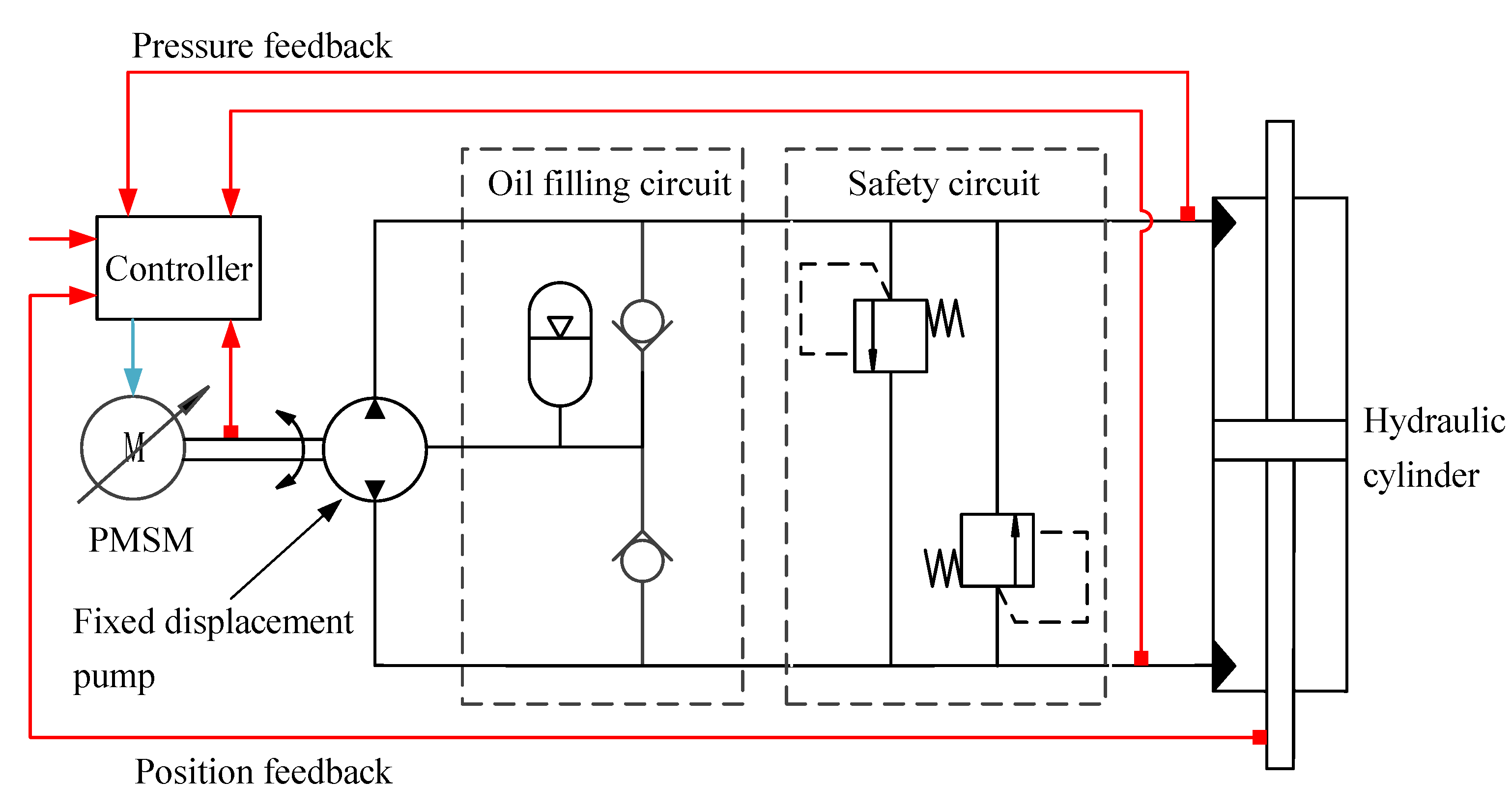
2. Working Principle of the EHSPCS
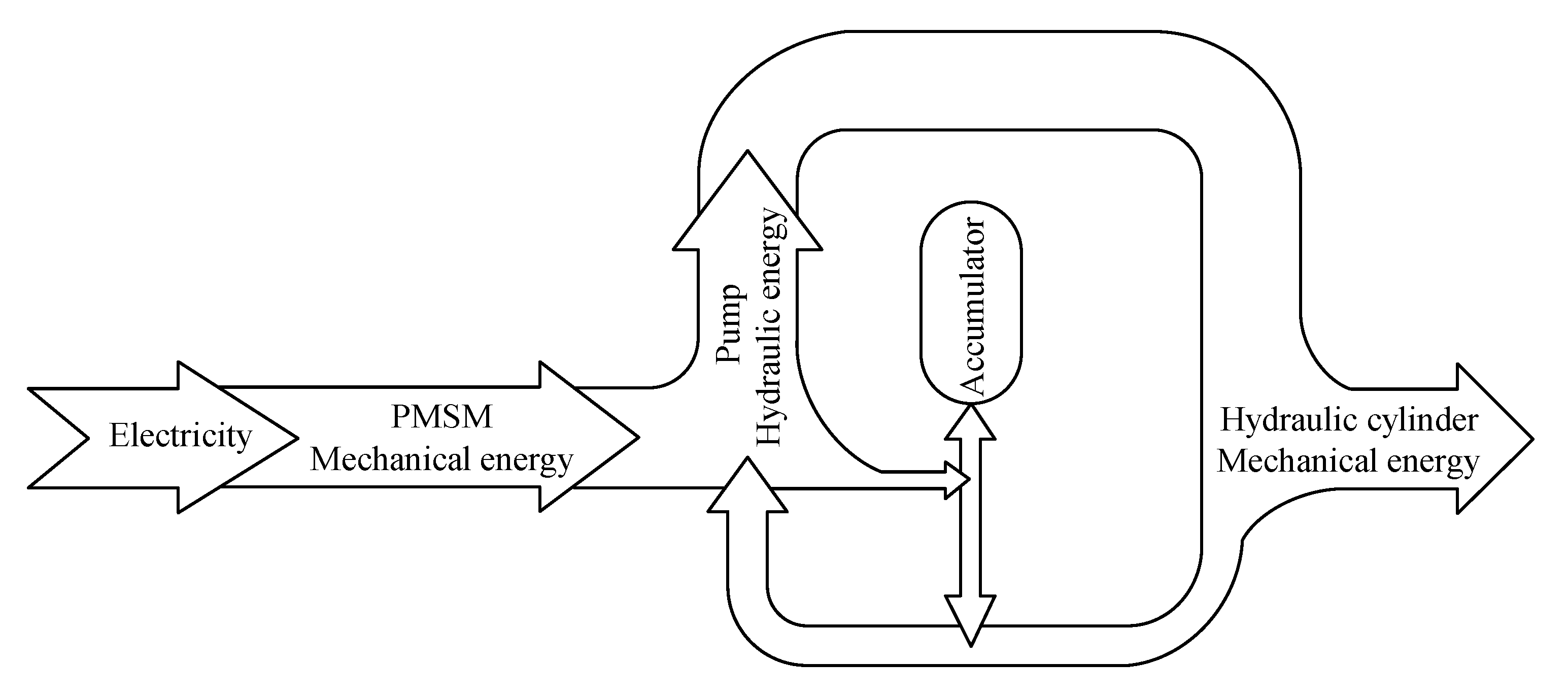
3. Establishment of Energy Transfer Model for EHSPCS System
3.1. Mathematical Model of Key Components of the EHSPCS
3.1.1. PMSM Model
3.1.2. Fixed Displacement Pump Model
3.1.3. Hydraulic Cylinder Model
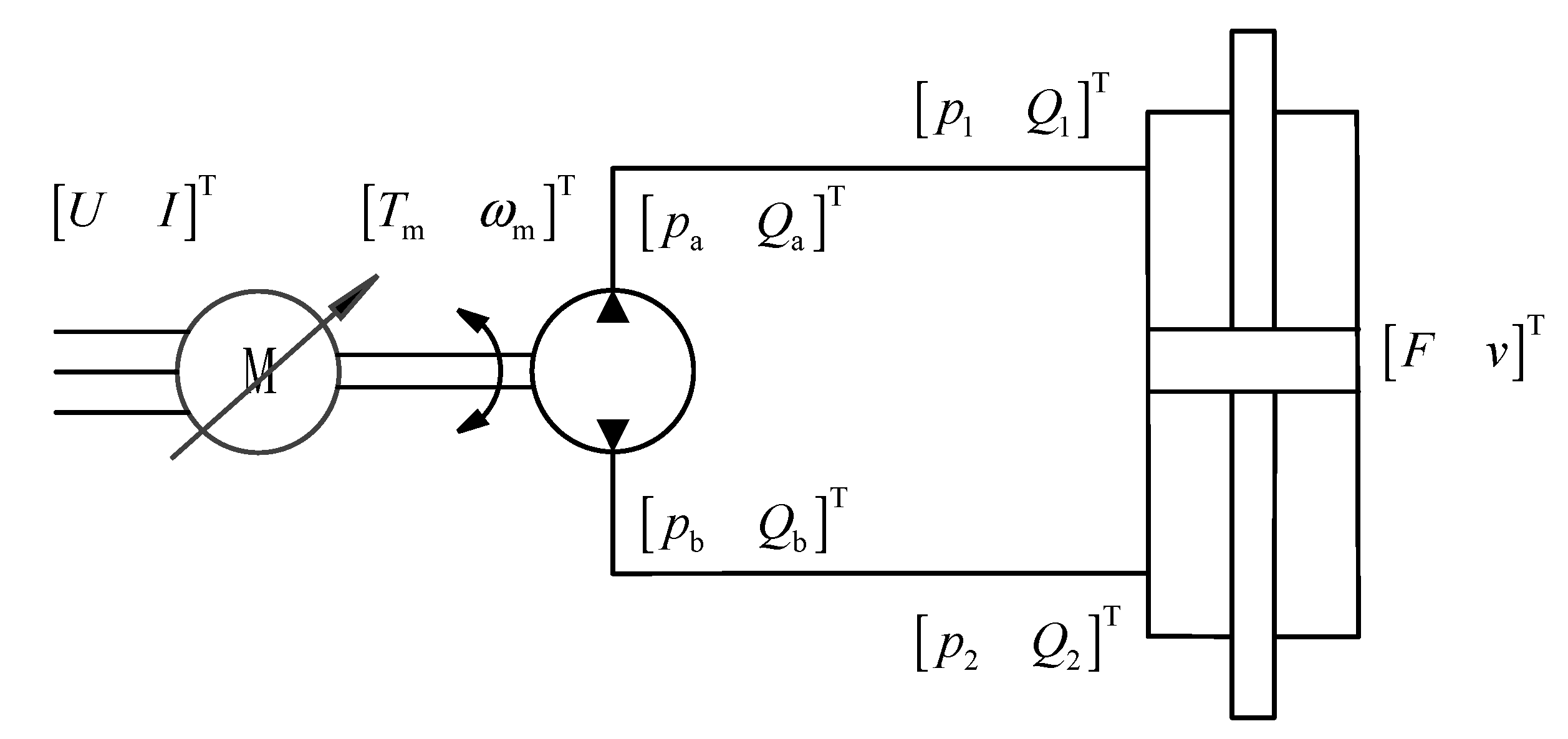
3.2. Mathematical Model of the EHSPCS Energy Transfer
- (1)
- The PMSM transforms the electric energy characteristic state vector [U I]T into the mechanical energy characteristic state vector [Tm ωm]T. According to Equations (4) and (5), the PMSM energy transfer model can be expressed as:
- (2)
- The fixed displacement pump transforms the mechanical energy characteristic state vector [Tm ωp]T into the hydraulic energy characteristic state vector [pa Qa]T. According to Equations (6) and (8), the energy transfer model of the fixed displacement pump can be expressed as:
- (3)
- The hydraulic cylinder transforms the hydraulic energy characteristic state vector [p1 Q1]T into the mechanical energy characteristic state vector [F v]T, and then drives the load to do work. According to Equations (9) and (11), the energy transfer model of the hydraulic cylinder can be expressed as:
3.3. Controller Model of the EHSPCS
4. Establishment of the EHSPCS Power Bond Diagram Simulation Model
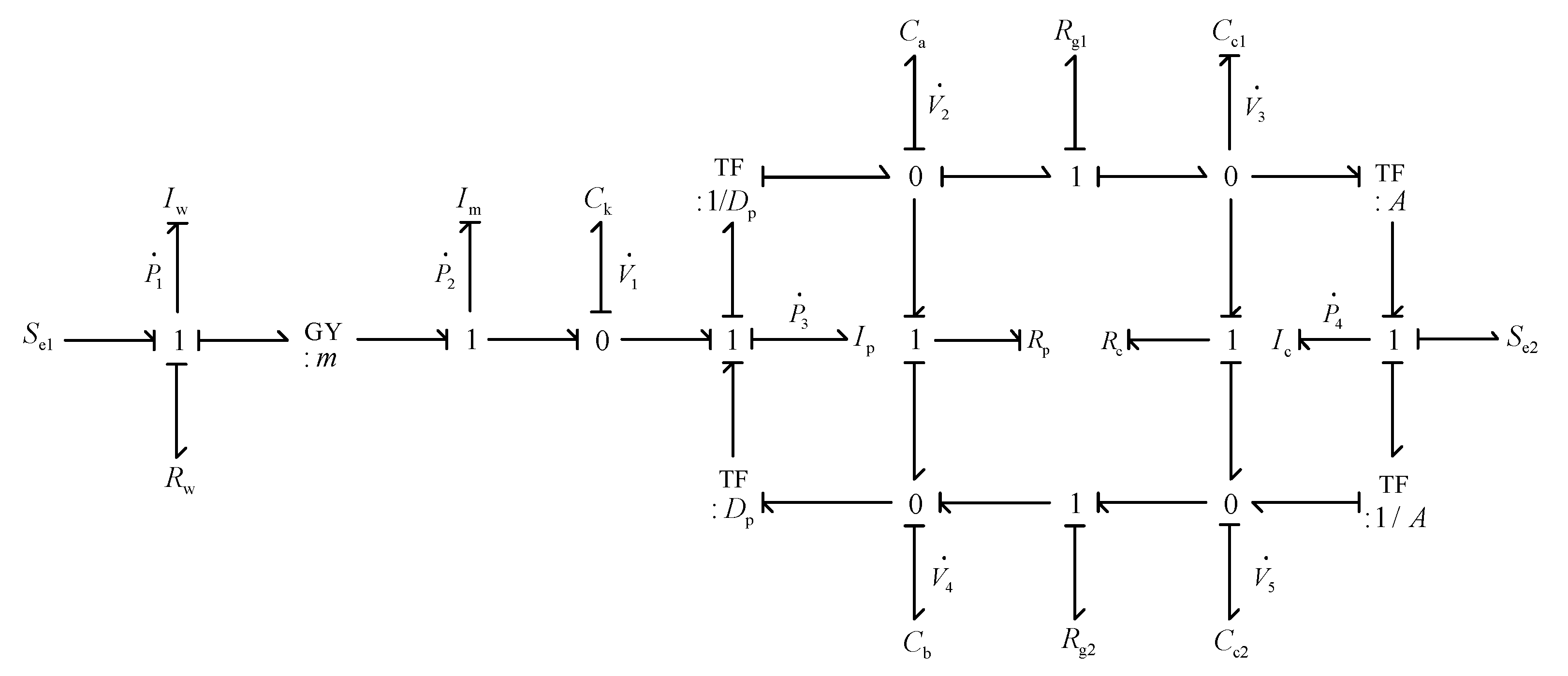
4.1. Power Bond Graph Model of the EHSPCS
- (1)
- The friction loss generated by the motor, the hydraulic pump, and the hydraulic cylinder in the process of movement and the fluid inductance of the valve block channel and the fluid resistance of the check valve are ignored.
- (2)
- The liquid capacity of the high-pressure channel and the high-pressure chamber of the fixed displacement pump is regarded as having the same liquid capacity value Ca, and the liquid capacity of the low-pressure channel, accumulator, and low-pressure chamber of the fixed displacement pump is regarded as having the same liquid capacity value Cb.
- (3)
- The density, viscosity, and bulk elastic modulus of the oil are ideal and regarded as constant values.
4.2. State Equation and State Matrix of the EHSPCS
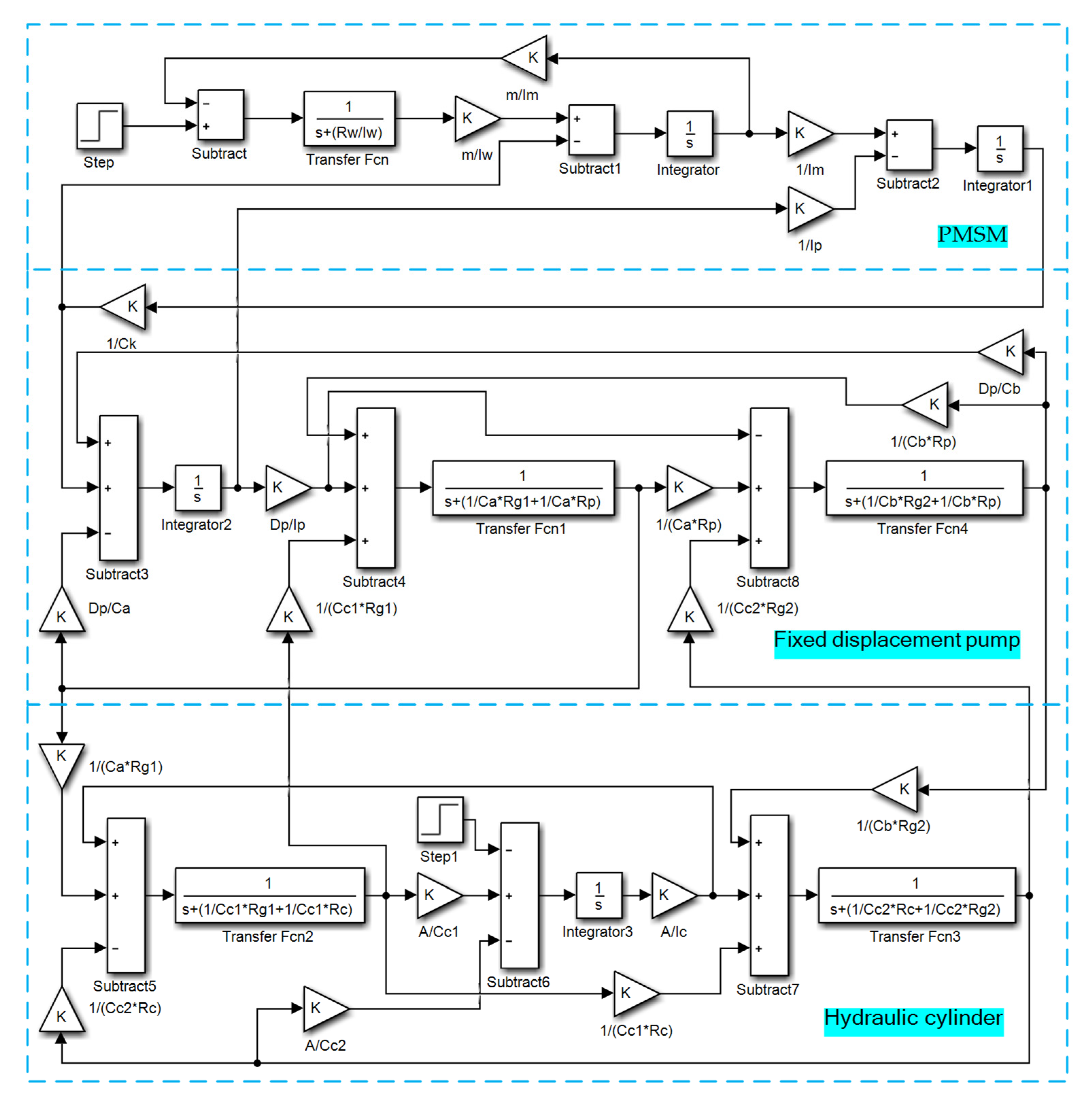
4.3. Simulink Simulation Model of the EHSPCS
5. Energy Transfer Simulation Experiment of the EHSPCS
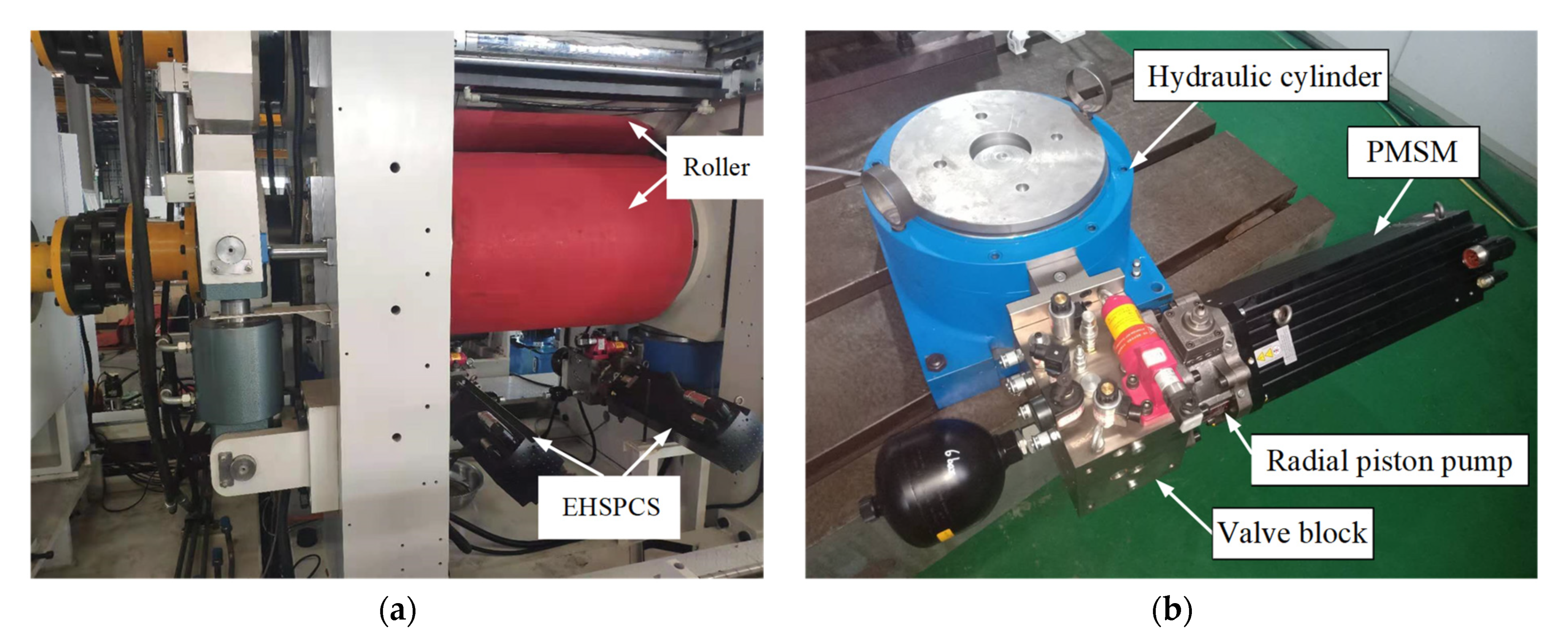
5.1. Experimental Platform for Energy Transfer Research of the EHSPCS
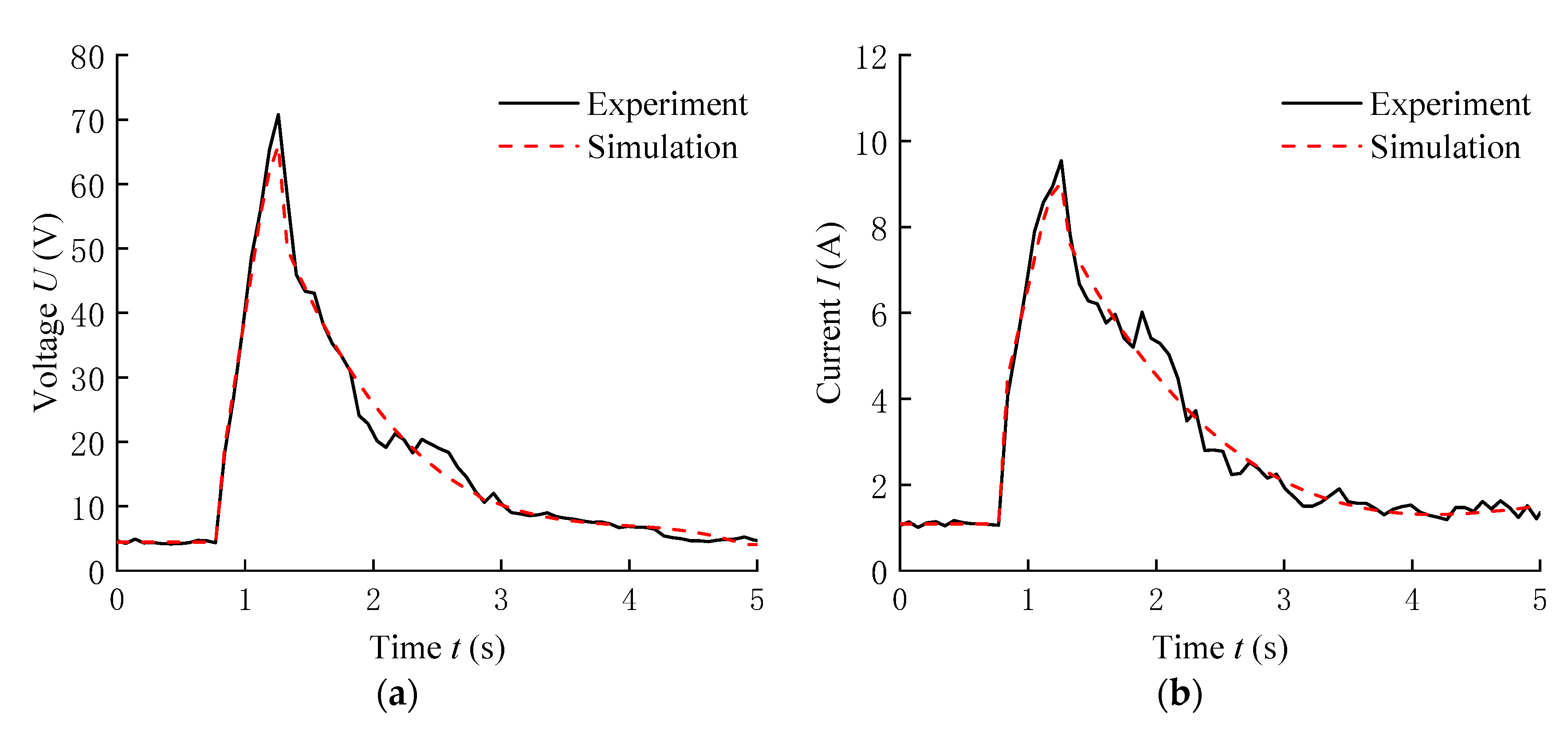
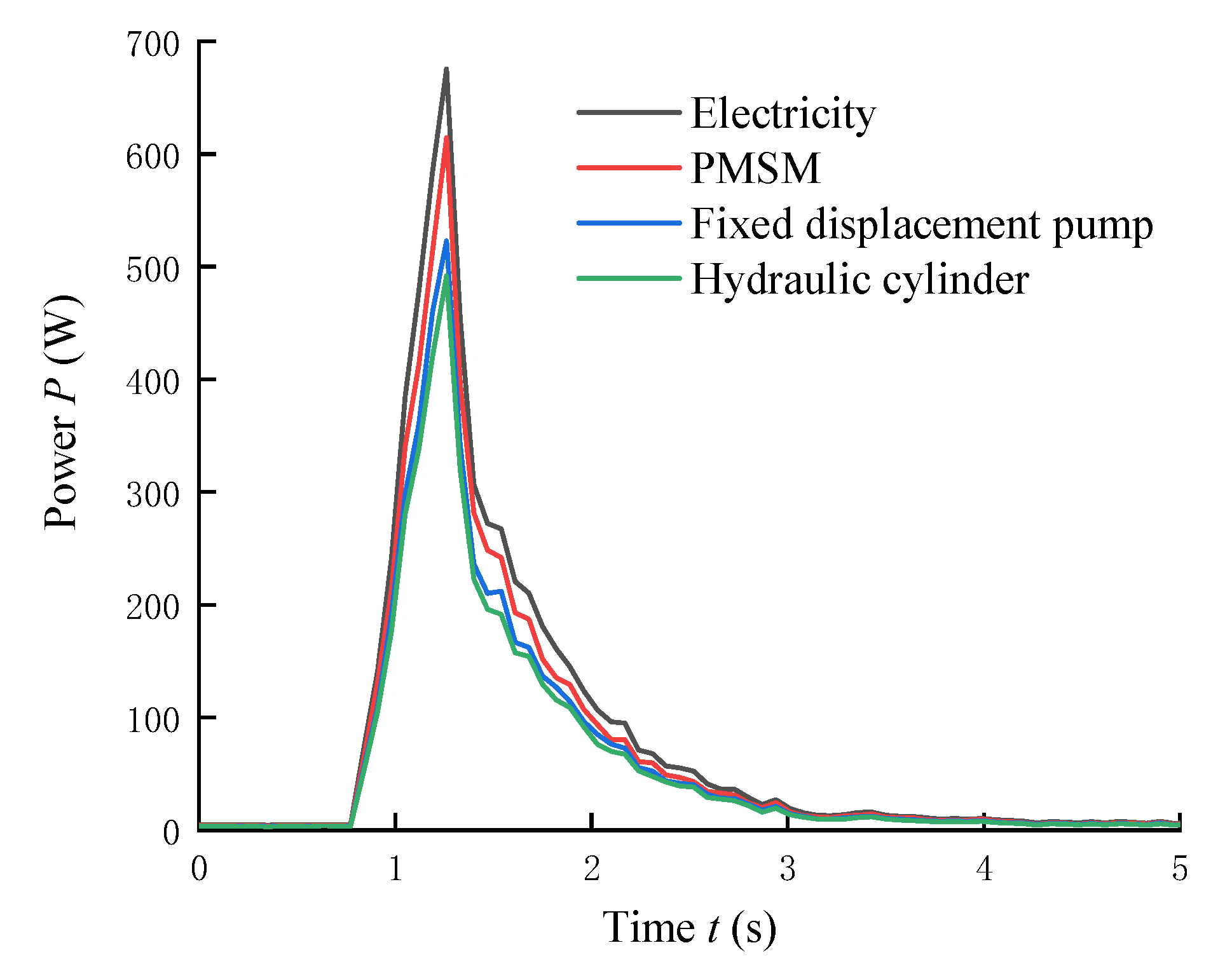
5.2. Energy Transfer Analysis of the Dynamic Position Following Process
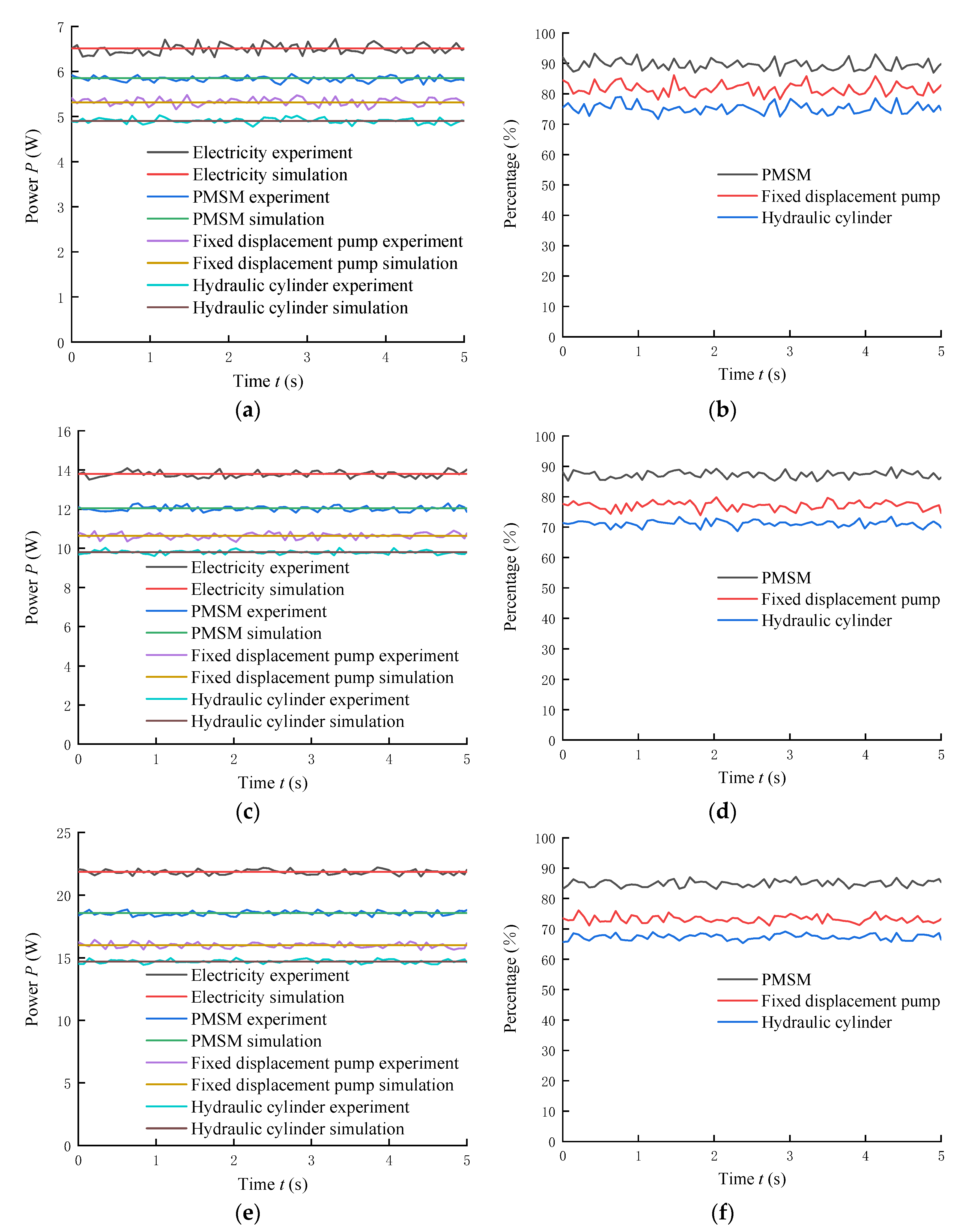
5.3. Energy Transfer Analysis of the Steady-State Position Holding Process
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Ud/Uq | d-q axis component of the stator voltage (V) |
| id/iq | d-q axis components of the stator current (A) |
| Ld/Lq | d-q axis components of the stator inductance (H) |
| Rs | Stator resistance (Ω) |
| ωe | Electrical angular velocity (rad/s) |
| Ψf | Permanent magnet flux (H) |
| Ke | Back potential coefficient |
| p | Pole logarithm of the motor |
| ωm | Mechanical angular velocity of the motor (rad/s) |
| Tm | The electromagnetic torque of the motor (Nm) |
| Bm | Damping coefficient of the motor (N/(m/s)) |
| TL | Load torque (Nm) |
| Jm | Moment of inertia of the motor (kg·m2) |
| Qa | Output flow of the fixed displacement pump (m3/s) |
| Dp | Displacement of the fixed displacement pump (m3/rad) |
| ωp | Speed of the fixed displacement pump (rad/s) |
| kip | Internal leakage coefficient of the fixed displacement pump (Pa/(m3/s)) |
| kep | External leakage coefficient of the fixed displacement pump (Pa/(m3/s)) |
| pa | Outlet pressure of the fixed displacement pump (Pa) |
| pb | Inlet pressure of the fixed displacement pump (Pa) |
| p0 | Discharge chamber pressure of the fixed displacement pump (Pa) |
| Bp | Viscous damping coefficient of the fixed displacement pump (N/(m/s)) |
| Jp | Moment of inertia of the fixed displacement pump (kg·m2) |
| Q1 | Flow input to the hydraulic cylinder (m3/s) |
| A | Effective action area of the hydraulic cylinder (m2) |
| v | Speed of the hydraulic cylinder (m/s) |
| kc | Internal leakage coefficient of the hydraulic cylinder (Pa/(m3/s)) |
| p1 | Pressure input to the hydraulic cylinder (Pa) |
| p2 | Output pressure of the hydraulic cylinder (Pa) |
| B | Viscous damping coefficient of oil (N/(m/s)) |
| F | External load of the hydraulic cylinder (N) |
| M | Total mass of piston rod and load (kg) |
References
- Yan, G.; Jin, Z.; Yang, M.; Yao, B. The thermal balance temperature field of the electro-hydraulic servo pump control system. Energies 2021, 14, 1364. [Google Scholar] [CrossRef]
- Zhang, T.; Chen, G.; Yan, G.; Zhang, C.; Li, Y.; Ai, C. Research on the nonlinear characteristic of flow in the electro-hydraulic servo pump control system. Processes 2021, 9, 814. [Google Scholar] [CrossRef]
- Wang, Y.; Kou, G.; Hu, S. Thermal modeling and analysis of oil-cooled high speed permanent magnet motor in the EHA system. In Proceedings of the CSAA/IET International Conference on Aircraft Utility Systems (AUS 2018), Guiyang, China, 19–22 June 2018; pp. 710–715. [Google Scholar]
- Chakraborty, I.; Mavris, D.N.; Emeneth, M.; Schneegans, A. A methodology for vehicle and mission level comparison of more electric aircraft subsystem solutions: Application to the flight control actuation system. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 1088–1102. [Google Scholar] [CrossRef]
- Alle, N.; Hiremath, S.S.; Makaram, S.; Subramaniam, K.; Talukdar, A. Review on electro hydrostatic actuator for flight control. Int. J. Fluid Power 2016, 17, 125–145. [Google Scholar] [CrossRef]
- Shi, C.; Wang, X.; Wang, S.; Wang, J.; Tomovic, M.M. Adaptive decoupling synchronous control of dissimilar redundant actuation system for large civil aircraft. Aerosp. Sci. Technol. 2015, 47, 114–124. [Google Scholar] [CrossRef]
- Yu, B.; Wu, S.; Jiao, Z.; Shang, Y. Multi-Objective Optimization Design of an Electrohydrostatic Actuator Based on a Particle Swarm Optimization Algorithm and an Analytic Hierarchy Process. Energies 2018, 11, 2426. [Google Scholar] [CrossRef] [Green Version]
- Yan, G.; Jin, Z.; Zhang, T.; Zhao, P. Position control study on pump-controlled servomotor for steam control valve. Processes 2021, 9, 221. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Dang, T.D.; Ahn, K.K. Application of Electro-Hydraulic Actuator System to Control Continuously Variable Transmission in Wind Energy Converter. Energies 2019, 12, 2499. [Google Scholar] [CrossRef] [Green Version]
- Li, K.; Zhong, L.; Kun, L.; Ping, Y. Thermal-hydraulic Modeling and Simulation of the Hydraulic System based on the Electro-hydrostatic Actuator. Procedia Eng. 2014, 80, 272–281. [Google Scholar] [CrossRef] [Green Version]
- Keivan, B.; Mehdi, R.S.; Ali, T.H.; Mohammad, Z. An energy-saving nonlinear position control strategy for electro-hydraulic servo systems. ISA Trans. 2015, 59, 268–279. [Google Scholar]
- Qu, S.; Fassbender, D.; Vacca, A.; Busquets, E. A High-efficient solution for electro-hydraulic actuators with energy regeneration capability. Energy 2021, 216, 119291. [Google Scholar] [CrossRef]
- Dong, L.; Yan, H.; Feng, L.; Tan, Q. Modelling and performance analysis of designed energy-efficient EHA under gravity loads. Int. J. Model. Identif. Control 2018, 30, 253–260. [Google Scholar] [CrossRef]
- Li, D.; Li, Y.; Li, Y.; Zhang, P.; Dong, S.; Yang, L. Study on PMSM Power Consumption of Dual-Variable Electro-Hydraulic Actuator with Displacement-Pressure Regulation Pump. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 1172–1177. [Google Scholar]
- Zhao, K.; Liu, Z.; Yu, S.; Li, X.; Huang, H.; Li, B. Analytical energy dissipation in large and medium-sized hydraulic press. J. Clean. Prod. 2015, 103, 908–915. [Google Scholar] [CrossRef]
- Hu, W.; Zhou, L.; Tian, Y.; Jiao, Z.; Shang, Y.; Song, Z.; Yan, L. Analysis for the power loss of electro hydrostatic actuator and hydraulic actuator. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; pp. 613–616. [Google Scholar]
- Wang, T.; Wang, Q. An energy-saving pressure-compensated hydraulic system with electrical approach. IEEE/ASME Trans. Mechatron. 2014, 19, 570–578. [Google Scholar] [CrossRef]
- Zhao, B.; Quan, Z.; Li, Y.; Quan, L.; Hao, Y.; Ding, L. A hybrid-driven elevator system with energy regeneration and safety enhancement. IEEE Trans. Ind. Electron. 2020, 67, 7715–7726. [Google Scholar] [CrossRef]
- Kaviani, A.K.; Hadley, B.; Mirafzal, B. A time-coordination approach for regenerative energy saving in multiaxis motor-drive systems. IEEE Trans. Power Electron. 2012, 27, 931–941. [Google Scholar] [CrossRef]
- Aridhi, E.; Abbes, M.; Mami, A. Pseudo bond graph model of a thermo-hydraulic system. In Proceedings of the 2013 5th International Conference on Modeling, Simulation and Applied Optimization (ICMSAO), Hammamet, Tunisia, 28–30 April 2013; pp. 1–5. [Google Scholar]
- Cheng, L.; Ye, Z.; Tong, Z. Bond graph modeling and simulation analysis of direct drive volume control electro-hydraulic servo system with long pipeline. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 309–312. [Google Scholar]
- Li, M.; Xu, B.; Chen, Z. Bond graph model of a new hydraulic winch test bench on energy recycle. In Proceedings of the 2010 IEEE International Conference on Industrial Engineering and Engineering Management, Macao, China, 7–10 December 2010; pp. 808–812. [Google Scholar]
- Rodríguez-Guillén, J.; Salas-Cabrera, R.; García-Vite, P.M. Bond graph as a formal methodology for obtaining a wind turbine drive train model in the per-unit system. Int. J. Electr. Power Energy Syst. 2021, 124, 106382. [Google Scholar] [CrossRef]
- Yu, L.; Qi, X. Bond-graph modeling in system engineering. In Proceedings of the 2012 International Conference on Systems and Informatics (ICSAI2012), Yantai, China, 19–20 May 2012; pp. 376–379. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Input voltage (V) | 380 |
| Armature inductance of PMSM (H) | 0.0025 |
| Armature resistance of PMSM (Ω) | 1.5 |
| Armature coefficient of PMSM ((N·m)/A) | 0.2 |
| Rotor inertia of PMSM (kg·m2) | 0.0063 |
| Compliance of PMSM shaft (rad/N·m) | |
| Rotor inertia of fixed displacement pump (kg·m2) | |
| Displacement of fixed displacement pump (m3/rad) | |
| Liquid capacity of high-pressure channel and high-pressure chamber of fixed displacement pump (m3/Pa) | |
| Leakage fluid resistance of fixed displacement pump (Pa/(m3/s)) | |
| Fluid resistance of high-pressure channel (Pa/(m3/s)) | |
| Liquid volume of high-pressure chamber of hydraulic cylinder (m3/Pa) | |
| Internal leakage resistance of hydraulic cylinder (Pa/(m3/s)) | |
| Effective area of hydraulic cylinder (m2) | |
| Equivalent mass on piston of hydraulic cylinder (kg) | 150 |
| Liquid volume of low-pressure chamber of hydraulic cylinder (m3/Pa) | |
| Fluid resistance of low-pressure channel (Pa/(m3/s)) | |
| Liquid capacity of low-pressure channel, accumulator, and low-pressure chamber of fixed displacement pump (m3/Pa) |
| External Load Force (kN) | Electric Power (W) | PMSM Power (W) | Fixed Displacement Pump Power (W) | Hydraulic Cylinder Power (W) | Efficiency (%) |
|---|---|---|---|---|---|
| 70 | 6.51 | 5.84 | 5.31 | 4.90 | 75.27 |
| 140 | 13.80 | 12.05 | 10.63 | 9.80 | 71.01 |
| 210 | 21.85 | 18.56 | 16.00 | 14.70 | 67.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Chen, G.; Lu, J.; Yu, C.; Yan, G.; Ai, C.; Li, Y. Research on Energy Transmission Mechanism of the Electro-Hydraulic Servo Pump Control System. Energies 2021, 14, 4869. https://doi.org/10.3390/en14164869
Yang M, Chen G, Lu J, Yu C, Yan G, Ai C, Li Y. Research on Energy Transmission Mechanism of the Electro-Hydraulic Servo Pump Control System. Energies. 2021; 14(16):4869. https://doi.org/10.3390/en14164869
Chicago/Turabian StyleYang, Mingkun, Gexin Chen, Jianxin Lu, Cong Yu, Guishan Yan, Chao Ai, and Yanwen Li. 2021. "Research on Energy Transmission Mechanism of the Electro-Hydraulic Servo Pump Control System" Energies 14, no. 16: 4869. https://doi.org/10.3390/en14164869