
Approach for the Model and Parameter Selection for the Calculation of Induction Machines


Abstract
:1. Introduction
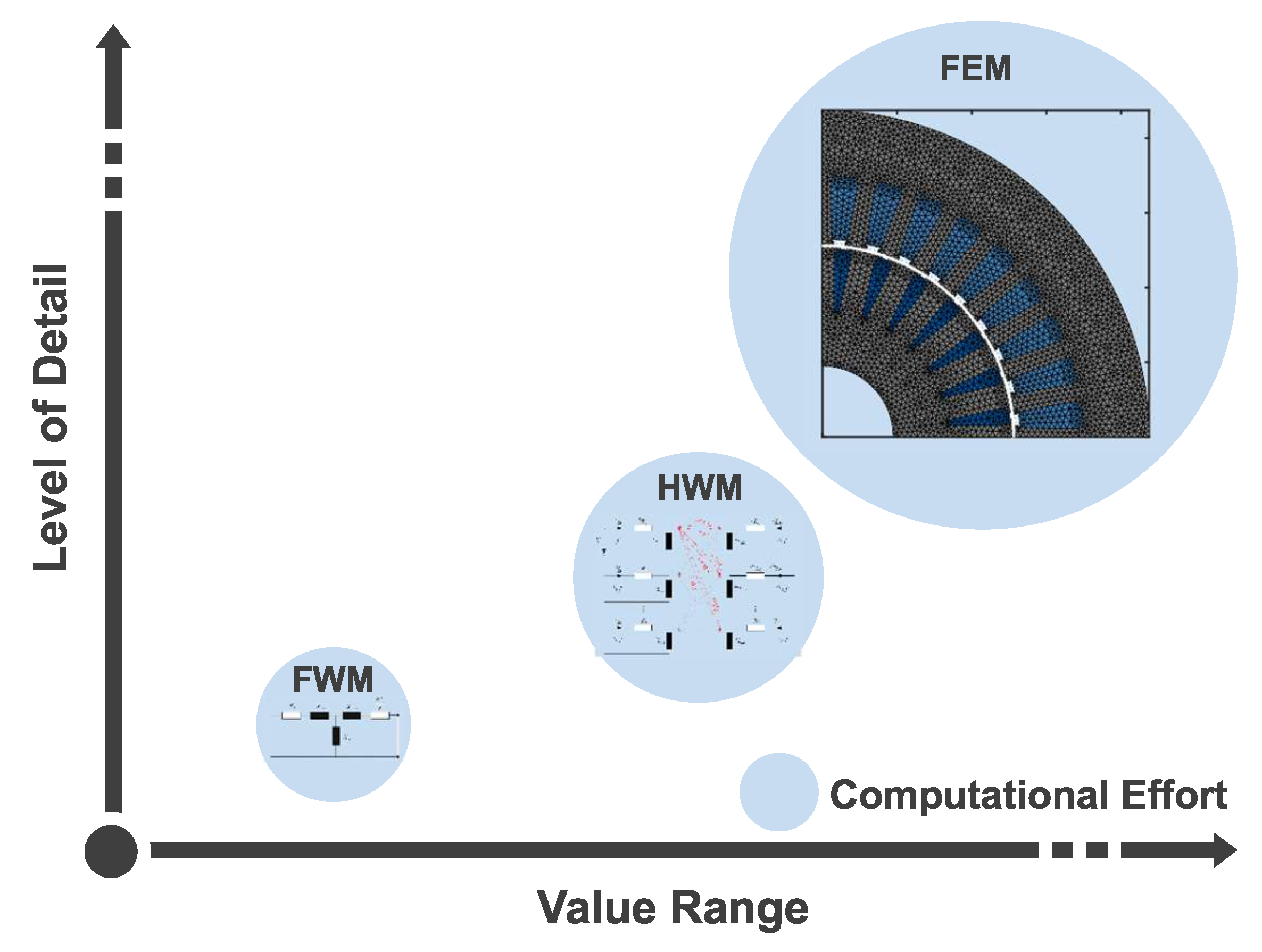
2. Induction Machine Models
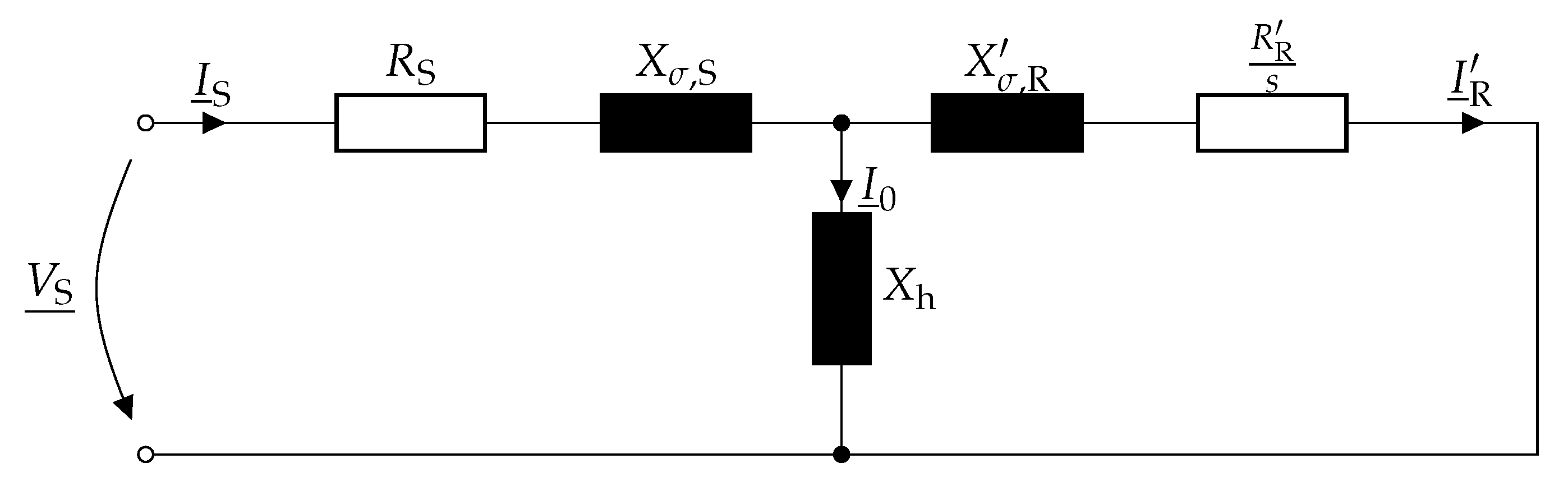
2.1. Fundamental Wave Model
2.1.1. Rotor Resistance
2.1.2. Leakage Inductances
2.1.3. Main Inductance and Saturation
2.1.4. Iron Losses
2.2. Harmonic Wave Model
2.2.1. Current Displacement
2.2.2. Slot Openings in the Stator and Rotor
2.2.3. Iron Losses
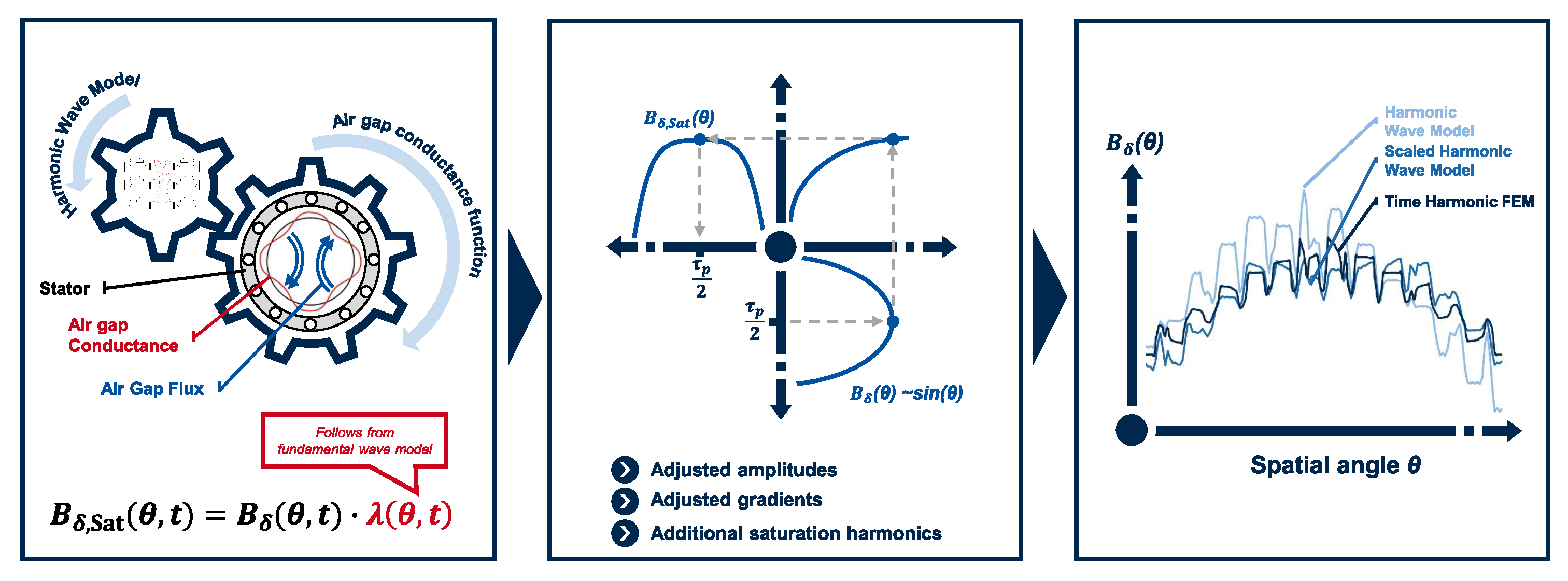
2.3. Extended Harmonic Wave Model
2.3.1. Approach
2.3.2. Calculation of the Air Gap Conductance Function
2.4. Numerical Models Based on the Finite Element Method
2.4.1. Mathematical Description of the FEM
2.4.2. Time Harmonic Finite Element Model
Slip Transformation
Non Linear Material Properties
2.5. Transient Finite Element Model
2.6. Used Iron Loss Model
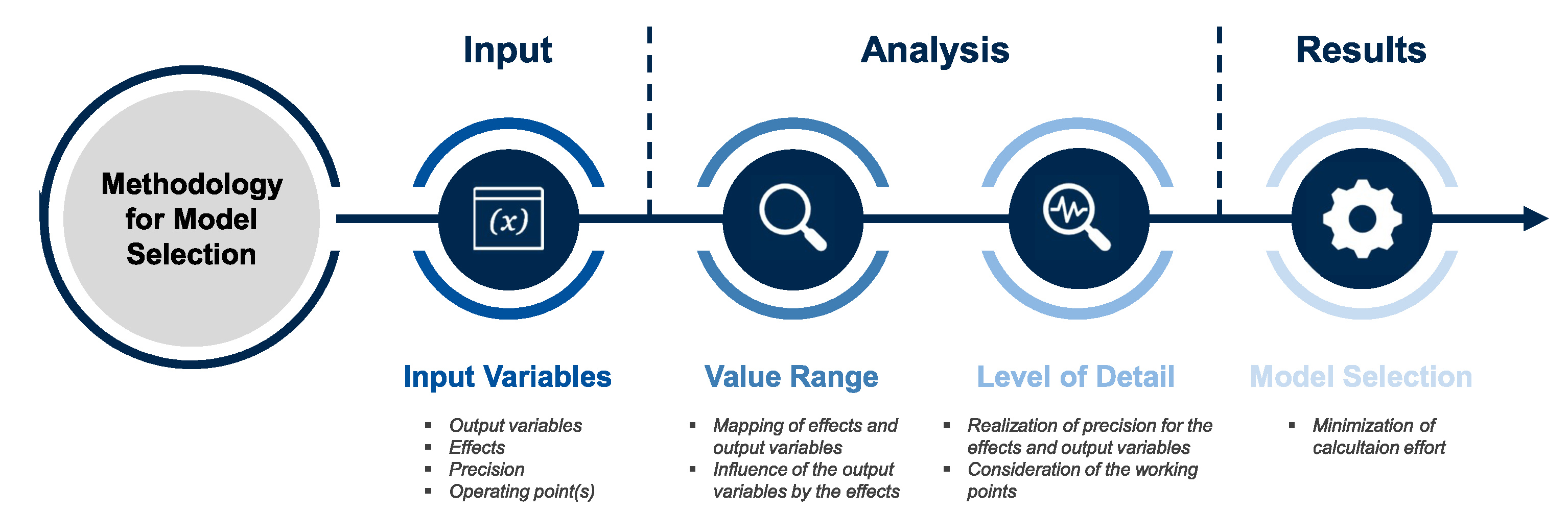
3. Model Selection Approach
3.1. Sensitivity Analysis
- 1.
- Sensitivity: For each of the models considered in the sensitivity analysis, it can be stated separately for all physical quantities whether they are sensitive to the geometry or material parameter under investigation.
- 2.
- Influence on Harmonics: The influence of the parameter to be examined on the temporal and spatial courses can be described on the basis of the change of the respective harmonic orders of the FFT spectrum. This influence can be recorded qualitatively, but can also be normalized in relation to the largest change of the occurring orders and thus quantified. In this way, the harmonics whose relative change is the greatest can be recorded in particular.
- 3.
- Elasticity: The elasticity describes the ratio of the change of an output quantity, related to the change of the input quantity and therefore results in the case of the sensitivity analysis for a physical quantity towhere describes the relative change of the physical quantity between the two simulated machine models. This allows us to capture, for each model, how much a certain quantity changes when the parameter under investigation is modified.
- 4.
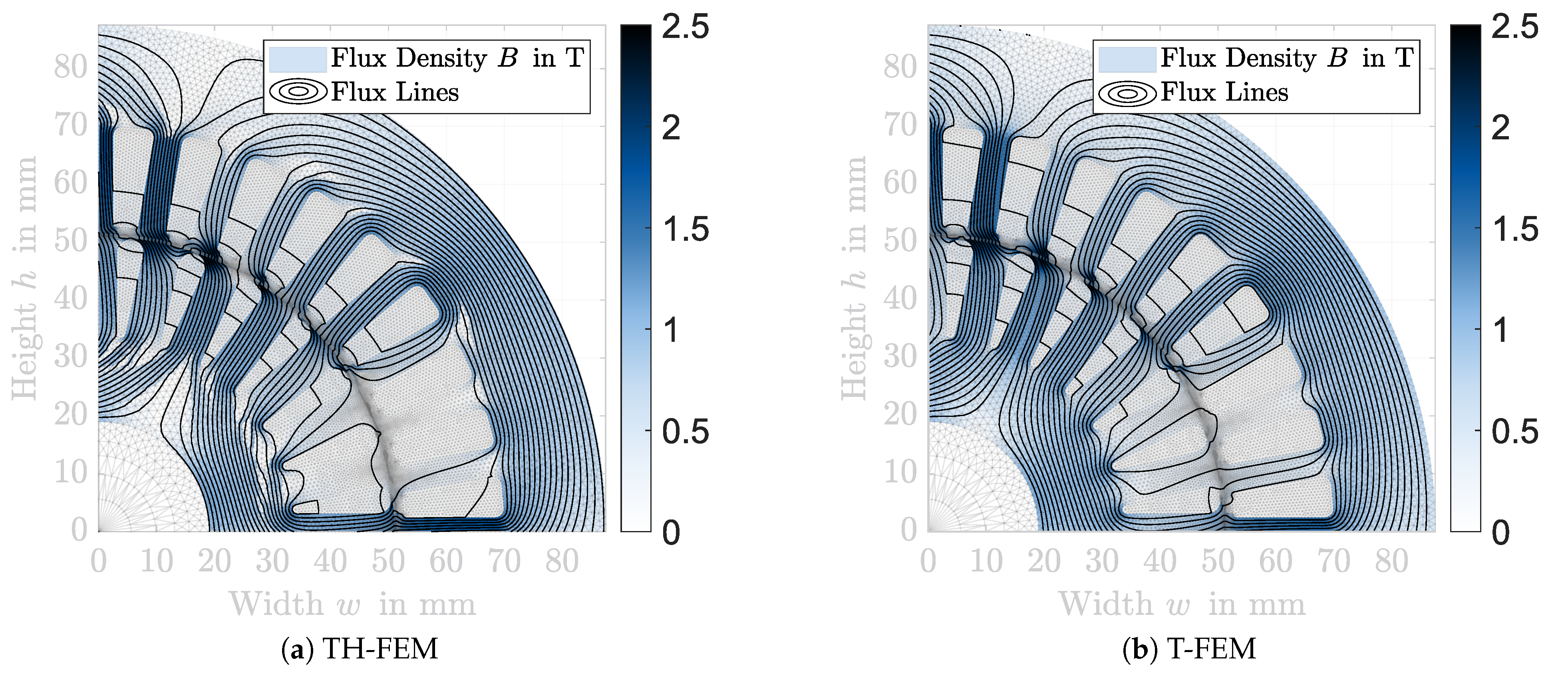
- Level of Detail: The description of the level of detail of the detection of a geometry or material change, related to a physical quantity can be done by means of a reference model. For this purpose, the TH-FEM is selected in this work, since it has the highest average precision after the T-FEM. The degree of detail of a physical quantity, therefore, follows from the relative deviation of the elasticity of the model under consideration from the elasticity of the TH-FEM.
3.2. Input Variables
3.3. Analysis of the Value Range and Degrees of Freedom
3.4. Analysis of the Level of Detail
- Physical Values: For the physical output quantities, such as ohmic losses, and iron losses, the simulation results of the T-FEM is used as a reference. The relative deviations from the results of the T-FEM are determined for exemplary operating points in the linear and non-linear range.
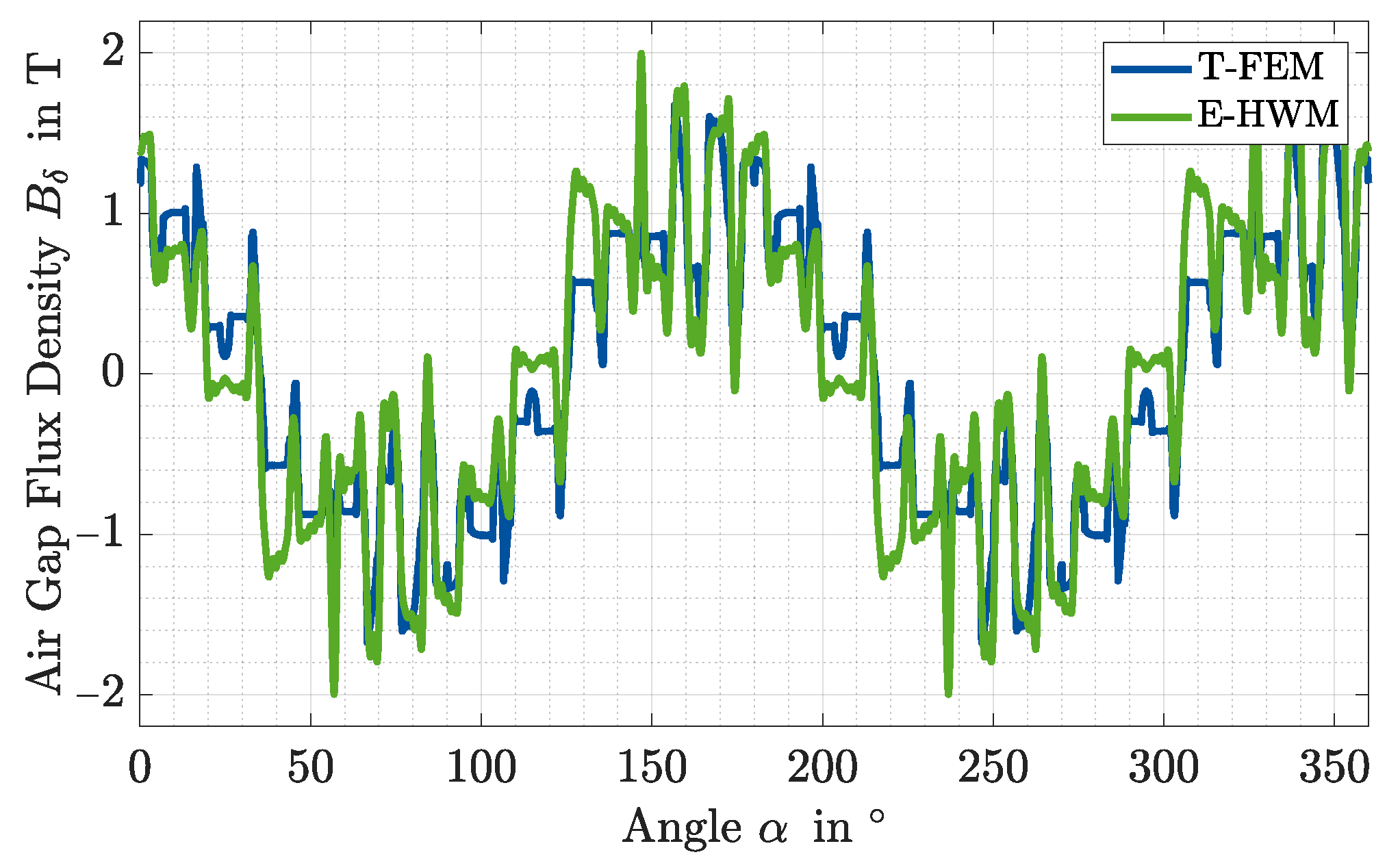
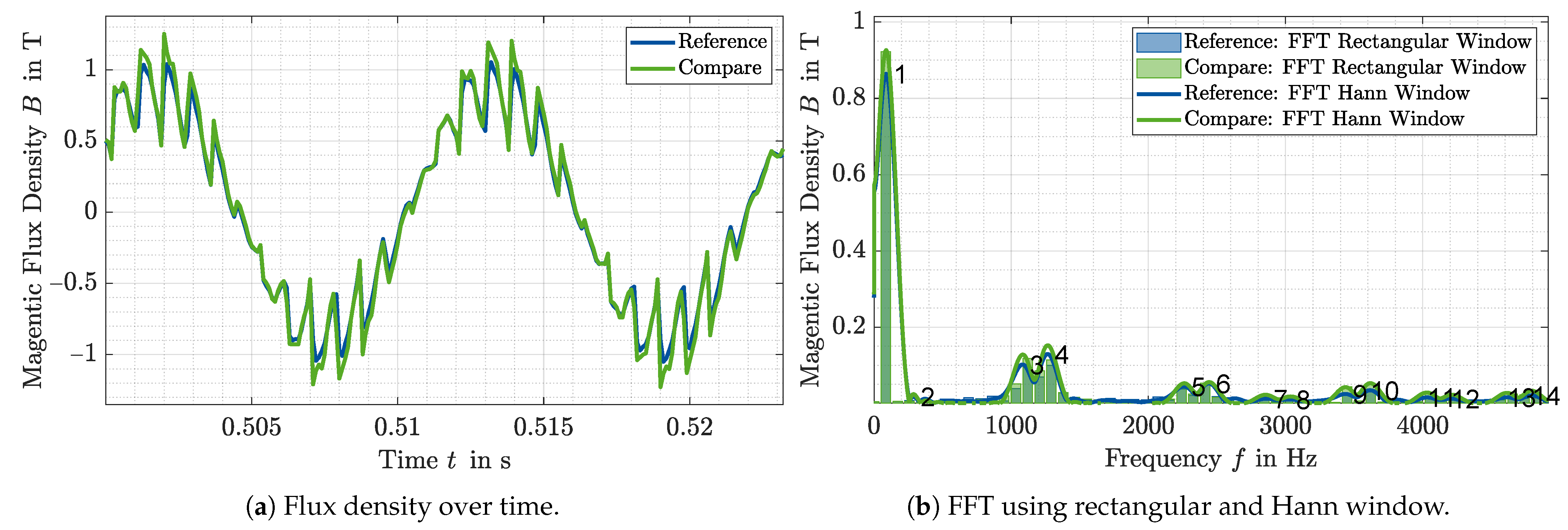
- Temporal and Spatial Characteristic: The precision of temporal and spatial characteristic, such as the magnetic flux density in the stator tooth over time or the magnetic air gap flux over time or position, is determined with reference to the simulation results of the T-FEM. For each characteristic, an exemplary operating point in the linear range and one in saturation are analyzed. The analysis is performed on the basis of the frequency spectrum of the considered quantity. Spatial characteristics, such as the spatial characteristic of the air gap flux density, are decomposed into their spectral components using the Fast Fourier Transformation (FFT) with a rectangular window. The level of detail is then separated into three subcategories. The precision of the fundamental wave, the precision of the harmonic amplitudes, and the precision of the occurring frequency orders. The slip dependence of an operating point during the operation of the IM leads to the fact that frequency components occur in the time variables which do not correspond to an integer multiple of the fundamental frequency. The use of a rectangular window in the FFT therefore leads to large spectral leakage. Therefore, a window function is used for the temporal quantities, which reduces the spectral leakage. A suitable window function is the Hann window. Figure 8a shows an example of the temporal course of the air gap flux density simulated by means of two different models at a particular position in the air gap. In Figure 8b the frequency spectra are plotted by means of a FFT with a rectangular window and by means of a FFT with a Hann window. To determine the level of detail, the output signal of the FFT with the Hann window of the reference signal as well as that of the comparison signal are analyzed for their local maxima. From the local maxima which are larger than a certain threshold value, the level of detail of the fundamental, the amplitudes of the harmonics and the occurring frequencies are then determined, as in the case of the location-dependent characteristics. In Figure 8b the maxima used to analyze the level of detail are marked with numbers.
- Physical Effects and Dynamic Processes: Since the level of detail of physical effects and dynamic processes, such as saturation, skin effect, or cutting edge effects, cannot be considered separately from other quantities, these precision are defined using a subjective point scale from one to ten, where one describes a very high precision and ten a very low precision.
3.5. Model Selection
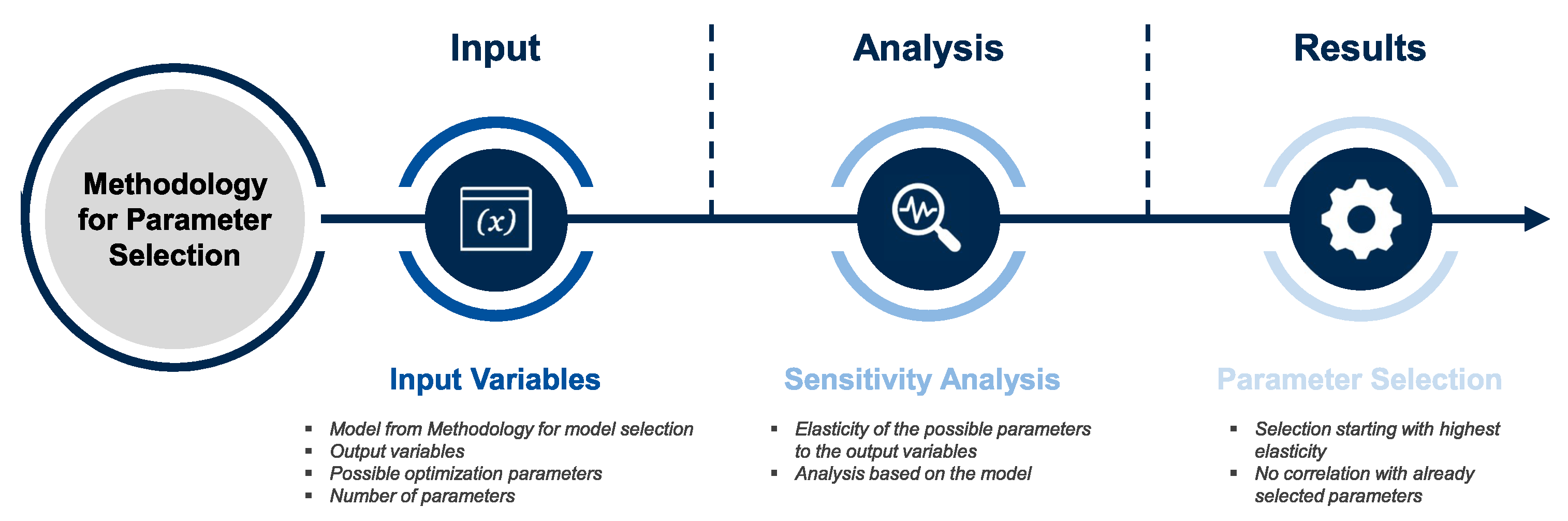
4. Approach for Parameter Selection
5. Application Example
5.1. Exemplary Induction Machine
5.2. Thermal Model
5.3. Model Selection Approach
5.4. Simulation Results
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| ECD | Equivalent Circuit Diagram |
| E-HWM | Extended Harmonic Wave Model |
| FE | Finite Element |
| FWM | Finite Element Model |
| FFT | Fast Fourier Transformation |
| FWM | Fundamental Wave Model |
| HWM | Harmonic Wave Model |
| IM | Induction Machine |
| IR | Infrared |
| LPTN | Lumped Parameter Thermal Network |
| MMF | Magnetomotive Force |
| NVH | Noise Vibration Harshness |
| T-FEM | Transient Finite Element Model |
| TH-FEM | Time Harmonic Finite Element Model |
References
- Zienkiewicz, O.C.; Chan, A.H.C. Coupled Problems and Their Numerical Solution. In Advances in Computational Nonlinear Mechanics; Springer: Vienna, Austria, 1989; Volume 300, pp. 139–176. [Google Scholar] [CrossRef]
- Nell, M.; Leuning, N.; Mönninghoff, S.; Groschup, B.; Müller, F.; Karthaus, J.; Jaeger, M.; Schröder, M.; Hameyer, K. Complete and Accurate Modular Numerical Computation Scheme for Multi–Coupled Electric Drive Systems. IET Sci. Meas. Technol. 2020, 14, 259–271. [Google Scholar] [CrossRef]
- Nell, M.; Kubin, A.; Hameyer, K. Multi-Stage Optimization of Induction Machines Using Methods for Model and Parameter Selection. Energies 2021, 14, 5537. [Google Scholar] [CrossRef]
- Oberretl, K. Allgemeine Oberfeldtheorie für ein- und dreiphasige Asynchron- und Linearmotoren mit Käfig unter Berücksichtigung der mehrfachen Ankerrückwirkung und der Nutöffnungen. Teil I: Theorie und Berechnungsverfahren. Arch. Elektrotechnik 1993, 76, 111–120. [Google Scholar] [CrossRef]
- Oberretl, K. Allgemeine Oberfeldtheorie für ein- und dreiphasige Asynchron- und Linearmotoren mit Käfig unter Berücksichtigung der mehrfachen Ankerrückwirkung und der Nutöffnungen. Teil II: Resultate, Vergleich mit Messungen. Arch. Elektrotechnik 1993, 76, 201–212. [Google Scholar] [CrossRef]
- Oberretl, K. Losses, Torques and Magnetic Noise in Induction Motors with Static Converter Supply, Taking Multiple Armature Reaction and Slot Openings into Account. IET Electr. Power Appl. 2007, 1, 517–531. [Google Scholar] [CrossRef]
- Binder, A. Elektrische Maschinen und Antriebe: Grundlagen, Betriebsverhalten; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar] [CrossRef]
- Nell, M.; Lenz, J.; Hameyer, K. Scaling Laws for the FE Solutions of Induction Machines. Arch. Electr. Eng. 2019, 68, 677–695. [Google Scholar] [CrossRef]
- Oberretl, K. Die Oberfeldtheorie des Käfigmotors unter Berücksichtigung der durch die Ankerrückwirkung verursachten Statoroberströme und der parallelen Wicklungszweige. Arch. Elektrotechnik 1965, 49, 343–364. [Google Scholar] [CrossRef]
- Stoyanov, L.; Lazarov, V.; Zarkov, Z.; Popov, E. Influence of Skin Effect on Stator Windings Resistance of AC Machines for Electric Drives. In Proceedings of the 16th Conference on Electrical Machines, Drives and Power Systems (ELMA), Varna, Bulgaria, 6–8 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Oberretl, K. Einseitiger Linearmotor mit Käfig im Sekundärteil. Arch. Elektrotechnik 1974, 56, 305–319. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Instantaneous Magnetic Field Distribution in Brushless Permanent Magnet DC Motors. III. Effect of Stator Slotting. IEEE Trans. Magn. 1993, 29, 143–151. [Google Scholar] [CrossRef]
- Elfgen, S.; Steentjes, S.; Bohmer, S.; Franck, D.; Hameyer, K. Influences of Material Degradation Due to Laser Cutting on the Operating Behavior of PMSM Using a Continuous Local Material Model. IEEE Trans. Ind. Appl. 2017, 53, 1978–1984. [Google Scholar] [CrossRef]
- Hameyer, K.; Belmans, R. Numerical Modelling and Design of Electrical Machines and Devices. In Advances in Electrical and Electronic Engineering; WIT Press: Southampton, UK, 1999; Volume 1. [Google Scholar]
- Schöps, S.; De Gersem, H.; Weiland, T. Winding Functions in Transient Magnetoquasistatic Field-Circuit Coupled Simulations. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2013, 32, 2063–2083. [Google Scholar] [CrossRef]
- Vassent, E.; Meunier, G.; Foggia, A. Simulation of Induction Machines Using Complex Magnetodynamic Finite Element Method Coupled with the Circuit Equations. IEEE Trans. Magn. 1991, 27, 4246–4249. [Google Scholar] [CrossRef]
- De Gersem, H.; Hameyer, K. Air-Gap Flux Splitting for the Time-Harmonic Finite-Element Simulation of Single-Phase Induction Machines. IEEE Trans. Magn. 2002, 38, 1221–1224. [Google Scholar] [CrossRef]
- De Geserm, H.; Mertens, R.; Kay, H. Comparison of time-harmonic and transient finite element models for asynchronous machines. In Proceedings of the Internationel Conference on Electrical Machines (ICEM00), Espoo, Finland, 28–30 August 2000; Volume 1, pp. 66–70. [Google Scholar]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]
- von Pfingsten, G.; Nell, M.; Hameyer, K. Hybrid Simulation Approaches for Induction Machine Calculation. COMPEL—Int. J. Comput. Math. Electr. Electron. Eng. 2018, 37, 1744–1754. [Google Scholar] [CrossRef]
- Steentjes, S.; von Pfingsten, G.; Hombitzer, M.; Hameyer, K. Iron-Loss Model With Consideration of Minor Loops Applied to FE-Simulations of Electrical Machines. IEEE Trans. Magn. 2013, 49, 3945–3948. [Google Scholar] [CrossRef]
- Nell, M.; Groschup, B.; Hameyer, K. Using Scaled Fe Solutions for an Efficient Coupled Electromagnetic—Thermal Induction Machine Model. COMPEL—Int. J. Comput. Math. Electr. Electron. Eng. 2021, 40, 267–279. [Google Scholar] [CrossRef]
- von Pfingsten, G.; Steentjes, S.; Hameyer, K. Operating Point Resolved Loss Calculation Approach in Saturated Induction Machines. IEEE Trans. Ind. Electron. 2017, 64, 2538–2546. [Google Scholar] [CrossRef]
- Groschup, B.; Nell, M.; Pauli, F.; Hameyer, K. Characteristic Thermal Parameters in Electric Motors: Comparison between Induction- and Permanent Magnet Excited Machine. IEEE Trans. Energy Convers. 2021, 36, 2239–2248. [Google Scholar] [CrossRef]
- Nell, M.; Lenz, J.; Hameyer, K. Efficient Numerical Optimization of Induction Machines by Scaled FE Simulations. In Proceedings of the XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 198–204. [Google Scholar] [CrossRef]
- Nell, M.; Groschup, B.; Hameyer, K. Efficient Coupled Electromagnetic-Thermal Induction Machine Model Using Scaled FE-Solutions. In Proceedings of the 19th International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering (ISEF), Nancy, France, 29–31 August 2019; pp. 1–2. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Output Quantities and Effects | Level of Detail | |
|---|---|---|
| Output Quantities | Ohmic Stator Losses | |
| Ohmic Rotor Losses | ||
| Hysteresis Losses | ||
| Eddy Current Losses | ||
| Excess Losses | ||
| Saturation Losses | ||
| Effects | Saturation | 5 |
| Winding Temperature | ||
| Rotor Temperature | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nell, M.; Kubin, A.; Hameyer, K. Approach for the Model and Parameter Selection for the Calculation of Induction Machines. Energies 2021, 14, 5623. https://doi.org/10.3390/en14185623
Nell M, Kubin A, Hameyer K. Approach for the Model and Parameter Selection for the Calculation of Induction Machines. Energies. 2021; 14(18):5623. https://doi.org/10.3390/en14185623
Chicago/Turabian StyleNell, Martin, Alexander Kubin, and Kay Hameyer. 2021. "Approach for the Model and Parameter Selection for the Calculation of Induction Machines" Energies 14, no. 18: 5623. https://doi.org/10.3390/en14185623
APA StyleNell, M., Kubin, A., & Hameyer, K. (2021). Approach for the Model and Parameter Selection for the Calculation of Induction Machines. Energies, 14(18), 5623. https://doi.org/10.3390/en14185623