1. Introduction
According to the International Energy Agency [
1], the global volume of electric vehicles (EVs) in 2030 is forecasted to reach 245 million, an increase from 7.2 million in 2019. The market demand for the type of EV varies based on several factors, such as the vehicle’s range and price. One of the EV architectures that can increase the vehicle range is a range-extender electric vehicle (REEV). A report by Grand View Research [
2] estimated the REEVs would have a market growth of 100% in 2026 compared to 2018. REEVs use an electric motor (EM) for the sole propulsion of the vehicle, and range-extenders (REx), such as an internal combustion (IC) engine or a microturbine generator to charge the battery energy storage (BES) or to provide the electrical energy to the EM through power electronics hardware [
3].
One of the issues with REEVs is that it contributes to a higher vehicle mass (due to the REx and BES components), thus negatively affecting vehicle dynamics [
4]. Milliken and Milliken [
5] established four important criteria that influence the driver’s perception, such as ride, handling, performance, and driveability. The ride attribute refers to the vertical responses of the vehicle when driven on different road surface coefficients (mu) [
6]. The handling attribute relates to the lateral responses due to the transverse wheel motion to the direction of the vehicle, such as lane change and cornering [
7]. The refinement of handling quality and ride comfort is a continuous process through the vehicle development stage to determine the optimum vehicle set-up between these vehicle attributes. For instance, Liu et al. [
8] established this process using the kinematics and compliance rigs, suspension dynamometer testing, and other testing equipment. On the other hand, the vehicle performance attribute describes the powertrain (PT) capability to meet specific loads at anticipated speeds. It uses the gear ratios strategies [
9] and the shift quality [
10] to achieve the vehicle system targets and has less dependency on the ride and handling attributes. In terms of vehicle driveability, which is the main focus of this work, Atabay et al. [
11] indicated that the driveability attribute reflects the vehicle longitudinal responses to torque demand in the form of throttle pedal excitation under specific driving conditions.
According to Dorey and Holmes [
12], vehicle driveability typically focuses on low-speed vehicle events such as acceleration/deceleration, which is one of the important factors for continuous product decision making and has demanding characteristics at the vehicle system level. Previously, the process of vehicle driveability assessment used a prototype vehicle. This process occurred at the later stage of the vehicle development; therefore, it was challenging to rectify any design issue. To meet the future REEVs market demands and challenges, advanced simulation tools have been used to study vehicle driveability in the early stage of the vehicle development process, as performed by Wang et al. [
13]. The implementation of a model-based method in REEVs highlights the complex nonlinear system interaction under torque demand and identifies the factors associated with vehicle driveability concerns. For instance, Ciceo et al. [
14] used the model-based method to design and validate the control strategy of the electric PT system to improve vehicle driveability. The model-based method in REEVs can also study the low-frequency resonances below 20 Hz that influence the vehicle driveability behaviour [
15]. Previous studies showed that the arrangement of IC engine mounts could influence vehicle driveability and low-frequency resonances [
16]. A previous study by Shah et al. [
17] also highlighted the vehicle shuffle frequency resonances migration due to the throttle responses at low-speed events due to the torque amplification. The vehicle frequency resonances are expected to be similar in REEVs due to the high EM torque at the low-speed region [
18]. Literature shows that the high EM torque excitation at vehicle low-speeds causes a complex interaction between the sub-system components, such as the driveline system [
19,
20] and the 6-degree-of-freedom (DoF) rubber mounts [
21] that dominate the vehicle’s low shuffle frequency resonances. Similar to ride comfort, the irregularities of road friction coefficient (mu) can also influence the low-frequency resonances. The definition of road mu is based on contact of two surfaces that generates motion resistance, and it varies from almost 0 (polished ice) to above 1.0 (dry asphalt) [
22]. For instance, Ivanoz et al. [
23] investigated the torque compensation for the driveline system on a polished ice road to improve the vehicle driveability. Also, a split-mu road surface test, where a vehicle is driven on two different road mu on the left and right side of the wheels, has the same influence on the driveline response [
24,
25]. However, no studies have been performed to identify other dominant components on different road mu under high torque excitation, to the best of the authors’ knowledge.
Another method that can be employed to analyse the component behaviour is a transfer path analysis (TPA). The TPA method is used to study the mechanical vibration of a system and determine the dominant components that control the system response [
26]. Most of the TPA studies on vehicle systems were focused on high-frequency vibration, as discussed in [
27,
28,
29,
30]. From the literature, only Jimbo et al. [
31] have used the TPA method to analyse the behaviour of the vehicle driveability during acceleration based on an experimental method. The TPA method also allowed for a couple-decouple process of the compliances to identify the shuffle frequency domination and to determine the tuning parameters for the driveability refinement [
32]. Zhang et al. [
33] also used the couple-decouple method to identify the dominant mode for ride and handling characteristics of the 7-DoF vehicle systems based on suspension system elements. Nevertheless, the coupling-decoupling of compliance properties have not been emphasised to understand their influence on the vehicle system behaviour.
This paper presents the model-based method for vehicle driveability study of REEV model at low-speed events. It consists of a high-torque powertrain excitation simulation on different road mu and identifies the dominant component for the low-frequency resonances. Also, the model-based method is used to study the energy flow from a throttle pedal input to a vehicle body and define the transfer function that controls the longitudinal vehicle response. The coupling-decoupling of the dominant component and its properties will be performed to investigate their influence on vehicle driveability and low-frequency resonances using an energy path analysis (EPA) method derived from the TPA method and discussed in
Section 2.3.
4. Conclusions
The model-based EPA method was a useful tool to determine the responses of dominant components acceleration on the vehicle body acceleration. These parameters can then be tuned for vehicle driveability refinement. Based on the road mu simulations, the relationships between the dominant components have been established. For example, the relationship between the front wheel and the PT cradle, due to the longitudinal responses. The front wheel produced one low-frequency resonance of 18.66 Hz on the tarmac and eight low-frequency resonances of 2.66 Hz, 4.66 Hz, 7.33 Hz, 10 Hz, 12 Hz, 14 Hz, and 20 Hz on the split-mu. On the other hand, the PT cradle longitudinal acceleration produced only one low-frequency resonance of 15.33 Hz on the tarmac, the polished ice, and the split-mu. The mode shape analysis method has provided a good insight into the components and the compliances responses under different road conditions, which was also shown by the influence of PT cradle longitudinal acceleration and front wheels. The level of coupling between the torsional components and the chassis components was sensitive to the low surface coefficient, where it has changed the components’ responses.
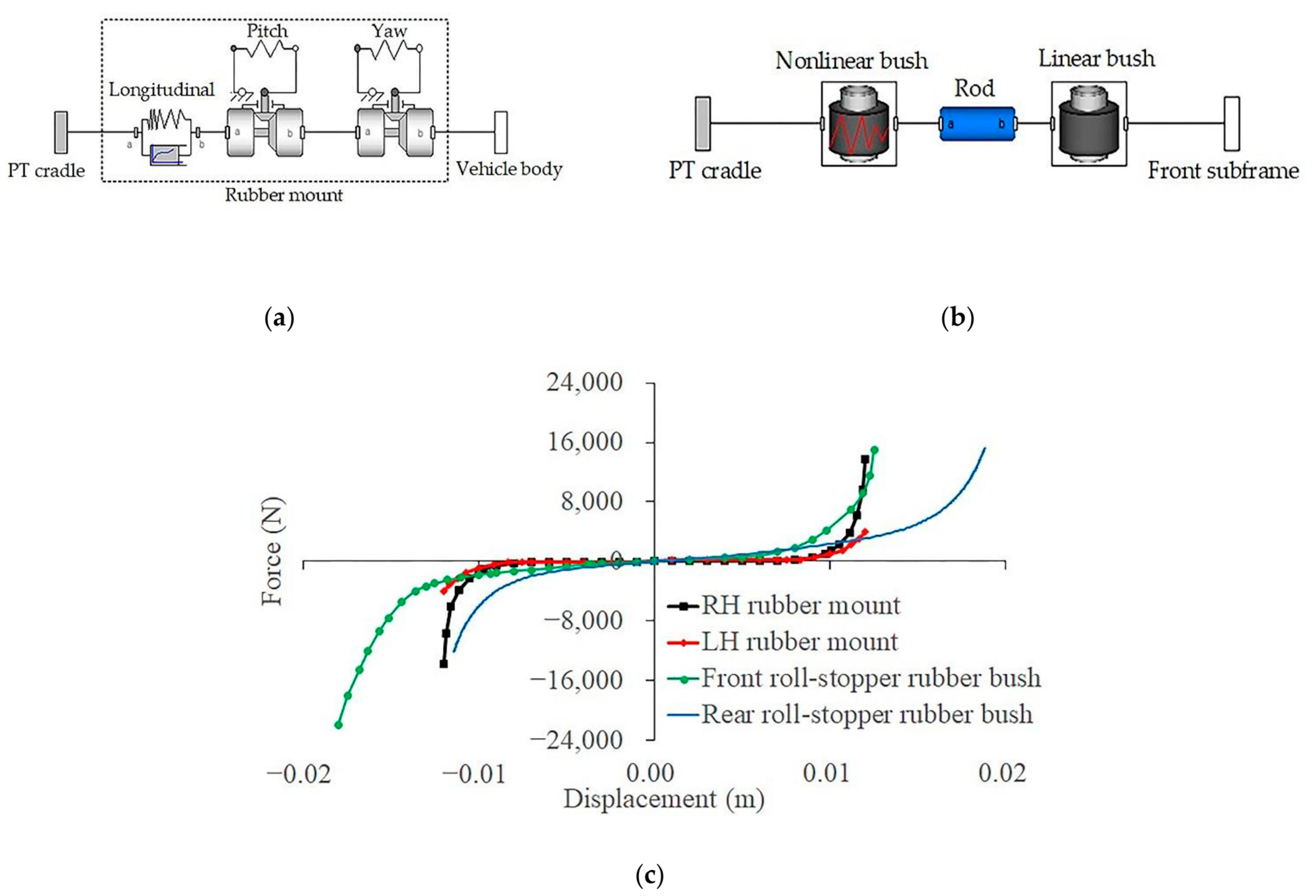
The EPA method identified the unwanted characteristics of the vehicle acceleration, such as the acceleration dip as a result of the interaction within the vehicle system, such as the front suspension and the subframe bushes. The decoupled simulation method was significant to determine the design requirement of the dominant components such as rubber mount, front roll-stopper, and rear roll-stopper. Without the rubber mount longitudinal properties, the vehicle body produced a low-frequency resonance of 10.66 Hz dominated by the PT cradle longitudinal acceleration. The vehicle body’s low-frequency resonances were migrated by decoupling the rubber mount yaw and pitch properties to 15.33 Hz dominated by PT cradle longitudinal acceleration; to 18.66 Hz dominated by the front wheel.
The absence of the front roll-stopper caused the vehicle body’s low-frequency resonance to migrate from 15.33 Hz to 13.33 Hz. This frequency migration was influenced by the PT cradle longitudinal acceleration. The decoupled rear roll-stopper migrated the vehicle body’s low-frequency resonance from 15.33 Hz to eight frequencies; 2.0 Hz, 3.33 Hz, 5.33 Hz, 7,33 Hz, 10.66 Hz and 12.66 Hz controlled by the PT cradle vertical acceleration; 7.33 Hz and 8.66 Hz controlled by the PT cradle longitudinal acceleration. Other frequencies (>17 Hz) were controlled by the front wheel.
The longitudinal and the pitch responses of the PT cradle were seen to have the predominant effect on the vehicle body’s longitudinal acceleration behaviour either in the time domain or frequency domain, which has been highlighted for detailed attention of the hardware tuning.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}