
The Bees Algorithm Tuned Sliding Mode Control for Load Frequency Control in Two-Area Power System



Abstract
:1. Introduction
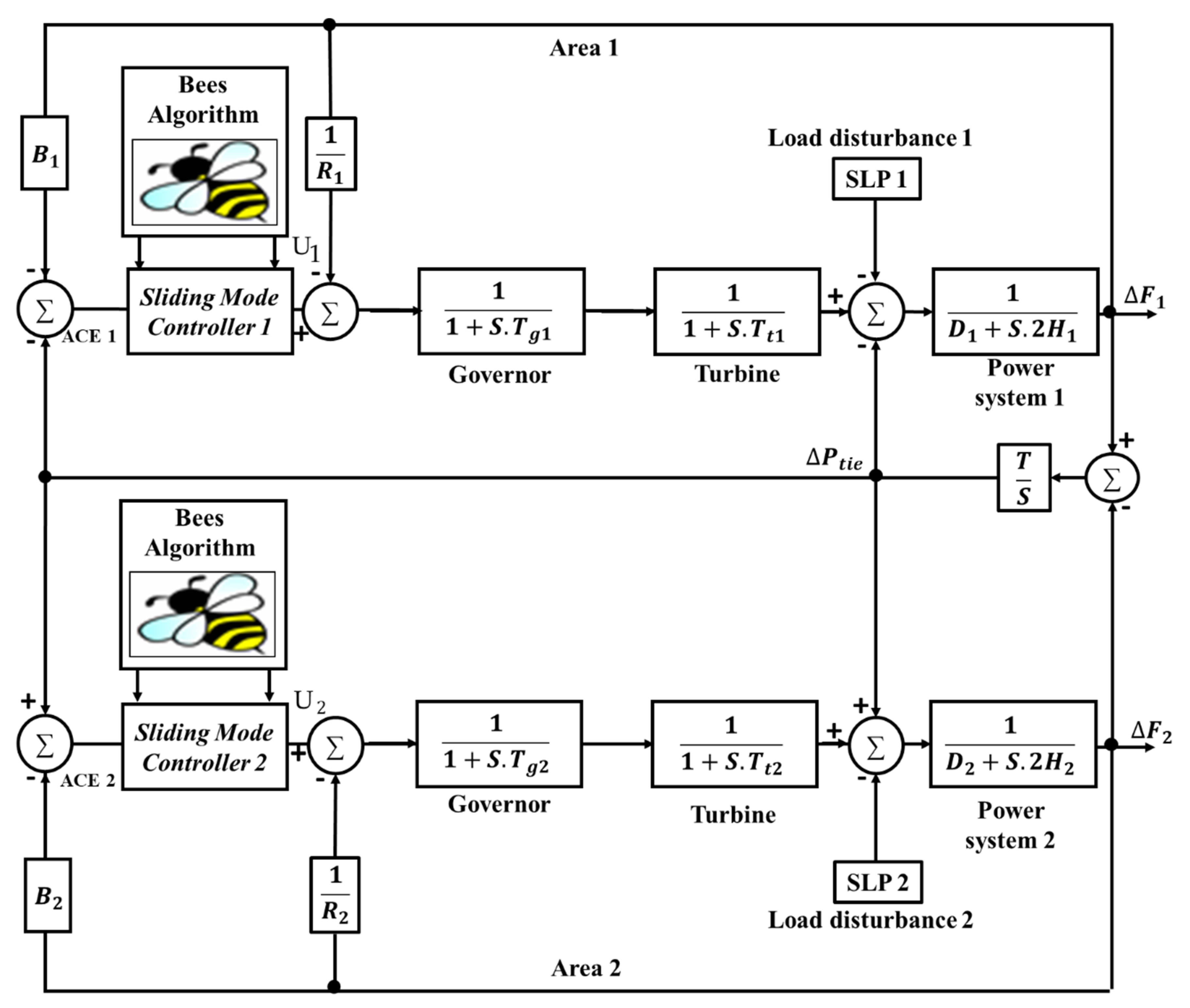
2. The Investigated Power System
3. The Proposed Sliding Mode Control Design
4. The Proposed Optimisation Technique and Objective Function
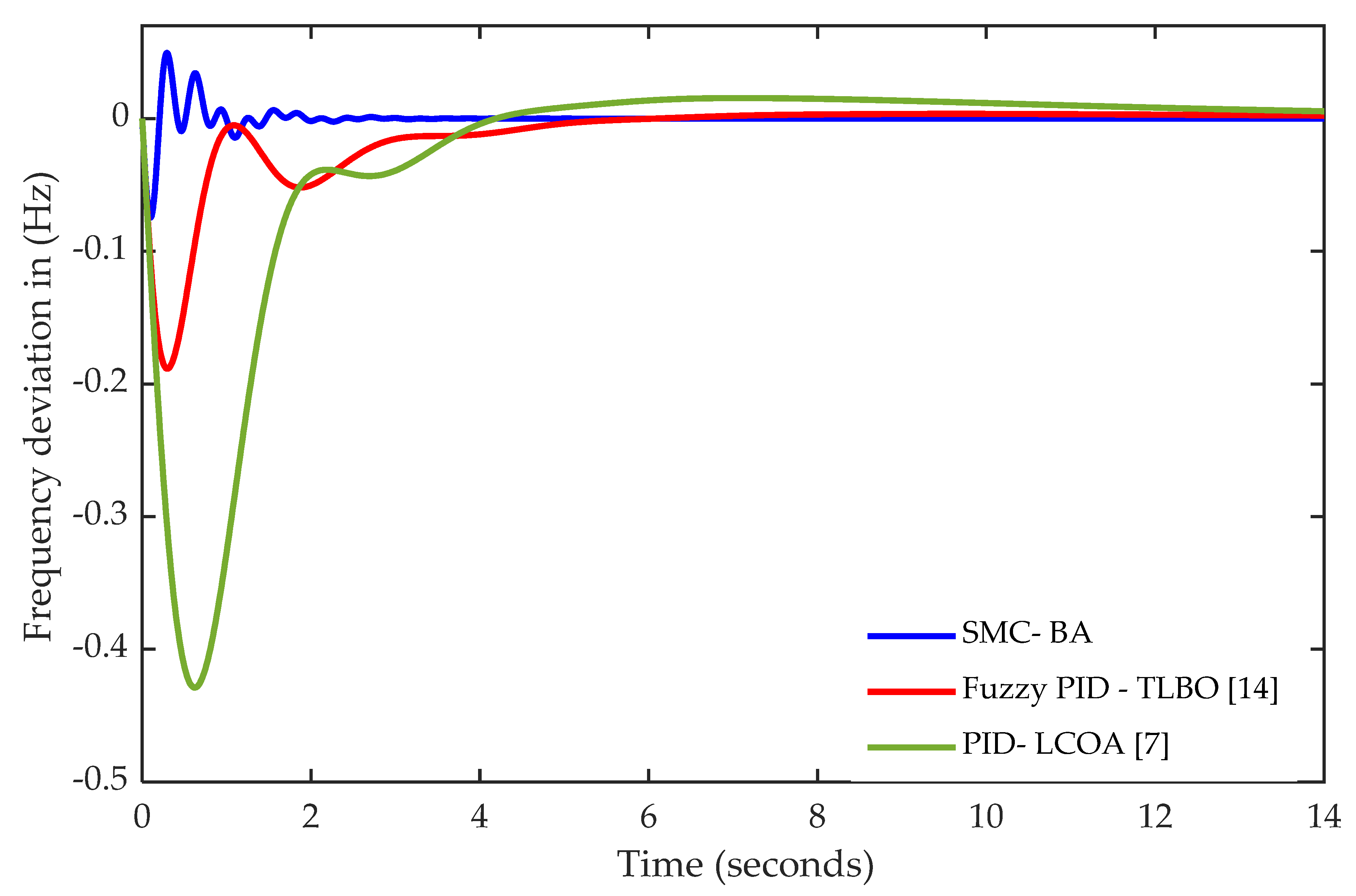
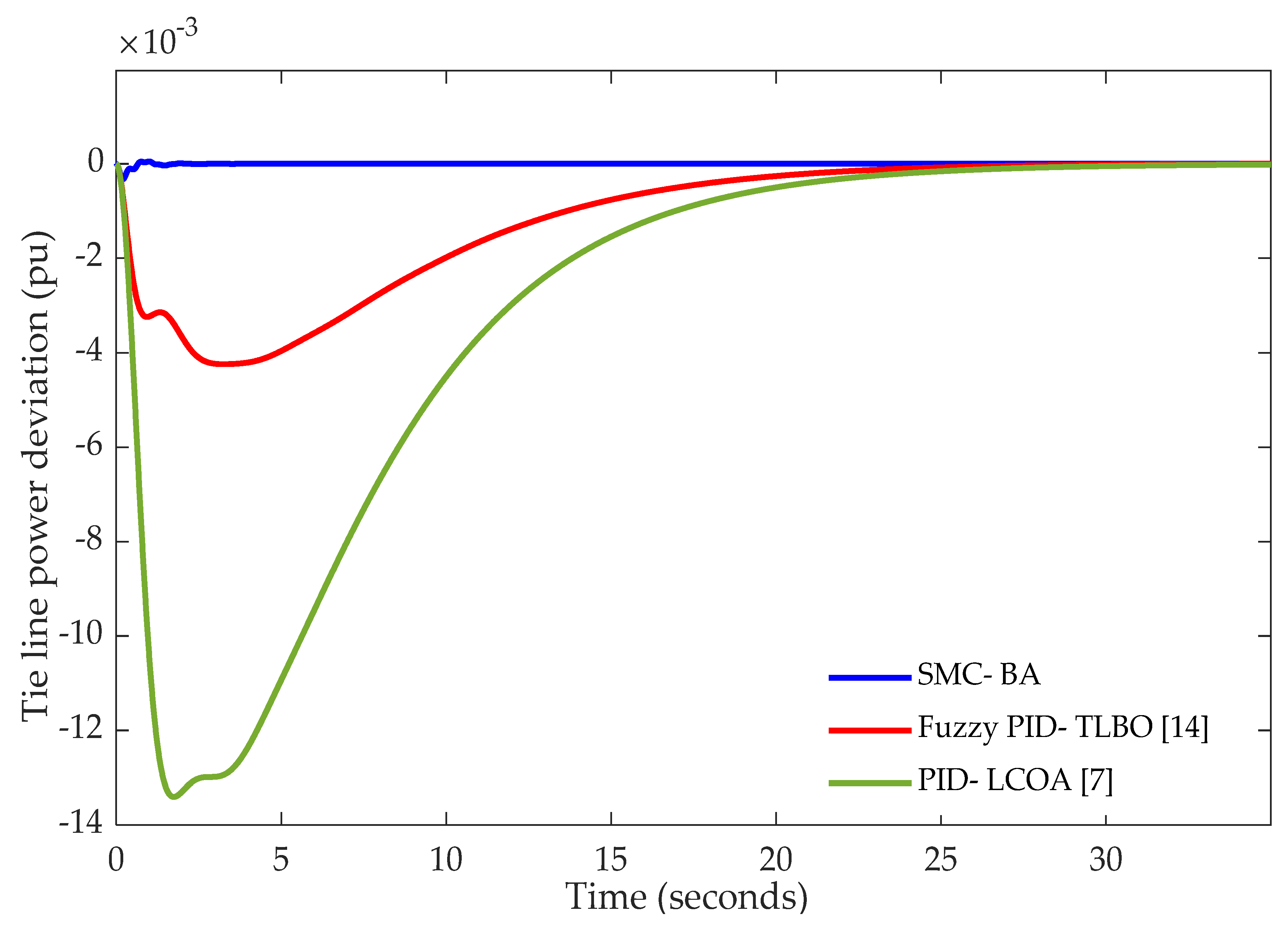
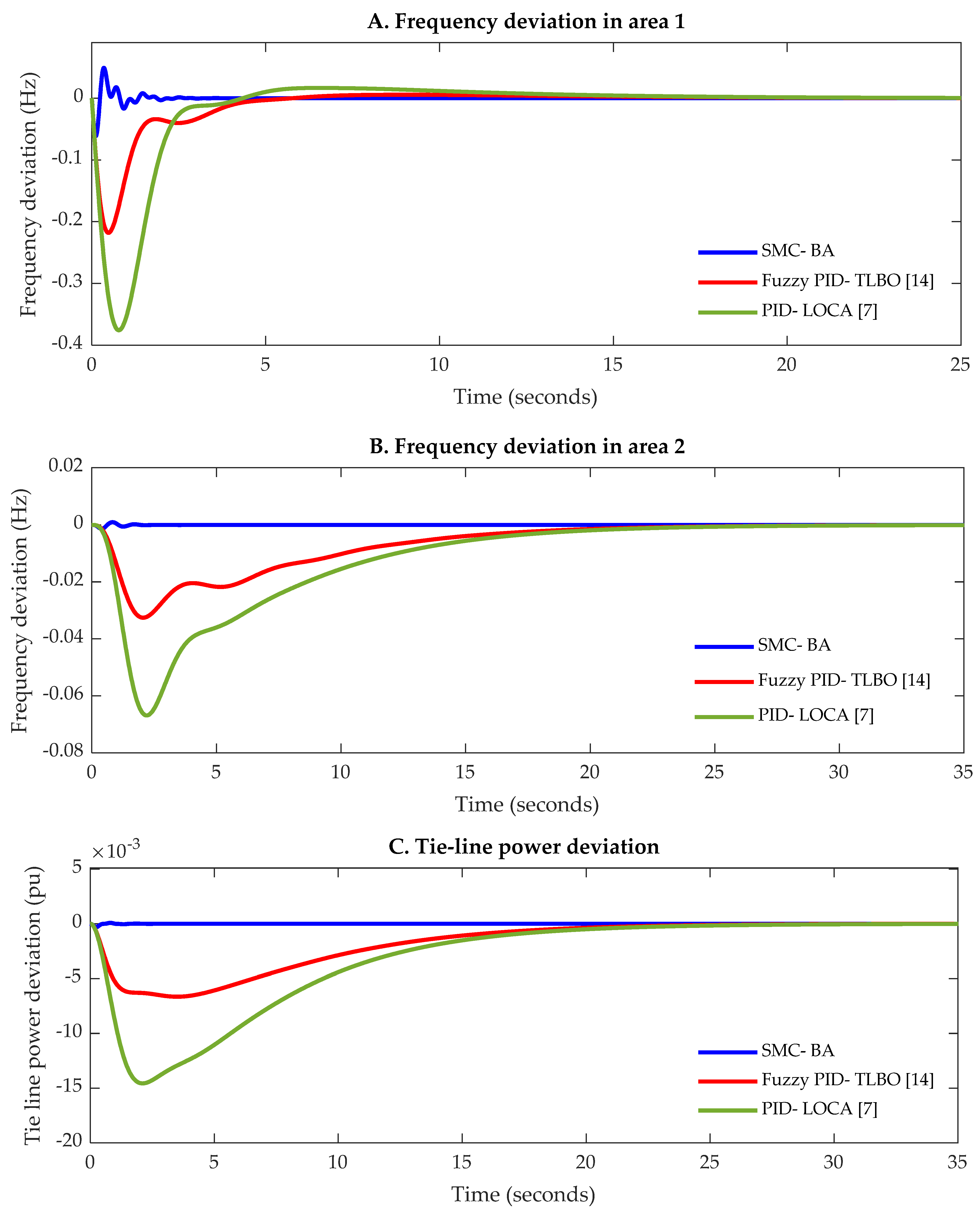
5. Results and Discussion
6. Robustness Investigation of SMC
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mohanty, B.; Panda, S.; Hota, P.K. Controller parameters tuning of differential evolution algorithm and its application to load frequency control of multi-source power system. Int. J. Electr. Power Energy Syst. 2014, 54, 77–85. [Google Scholar] [CrossRef]
- Sahu, B.K.; Pati, T.K.; Nayak, J.R.; Panda, S.; Kar, S.K. A novel hybrid LUS-TLBO optimized fuzzy-PID controller for load frequency control of multi-source power system. Int. J. Electr. Power Energy Syst. 2016, 74, 58–69. [Google Scholar] [CrossRef]
- Shouran, M.; Anayi, F.; Packianather, M. A State-of-the-Art Review on LFC Strategies in Conventional and Modern Power Systems. In Proceedings of the 2021 International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), Greater Noida, India, 4–5 March 2021; pp. 268–277. [Google Scholar]
- Alhelou, H.H.; Hamedani-Golshan, M.-E.; Zamani, R.; Heydarian-Forushani, E.; Siano, P. Challenges and Opportunities of Load Frequency Control in Conventional, Modern and Future Smart Power Systems: A Comprehensive Review. Energies 2018, 11, 2497. [Google Scholar] [CrossRef] [Green Version]
- Kozák, S. State-of-the-art in control engineering. J. Electr. Syst. Inf. Technol. 2014, 1, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Ali, E.S.; Abd-Elazim, S.M. Bacteria foraging optimization algorithm based load frequency controller for interconnected power system. Int. J. Electr. Power Energy Syst. 2011, 33, 633–638. [Google Scholar] [CrossRef]
- Farahani, M.; Ganjefar, S.; Alizadeh, M. PID controller adjustment using chaotic optimisation algorithm for multi-area load frequency control. IET Control Theory Appl. 2012, 6, 1984–1992. [Google Scholar] [CrossRef]
- Zamani, A.; Barakati, S.M.; Yousofi-Darmian, S. Design of a fractional order PID controller using GBMO algorithm for load–frequency control with governor saturation consideration. ISA Trans. 2016, 64, 56–66. [Google Scholar] [CrossRef]
- Çelik, E. Design of new fractional order PI–fractional order PD cascade controller through dragonfly search algorithm for advanced load frequency control of power systems. Soft Comput. 2021, 25, 1193–1217. [Google Scholar] [CrossRef]
- Ersdal, A.M.; Fabozzi, D.; Imsland, L.; Thornhill, N.F. Model predictive control for power system frequency control taking into account imbalance uncertainty. IFAC Proc. Vol. 2014, 47, 981–986. [Google Scholar] [CrossRef] [Green Version]
- Badihi, H.; Zhang, Y.; Hong, H. Design of a pole placement active power control system for supporting grid frequency regulation and fault tolerance in wind farms. IFAC Proc. Vol. 2014, 47, 4328–4333. [Google Scholar] [CrossRef] [Green Version]
- Davidson, R.A.; Ushakumari, S. H-infinity loop-shaping controller for load frequency control of a deregulated power system. Procedia Technol. 2016, 25, 775–784. [Google Scholar] [CrossRef] [Green Version]
- Kasireddy, I.; Nasir, A.W.; Singh, A.K. IMC based Controller Design for Automatic Generation Control of Multi Area Power System via Simplified Decoupling. Int. J. Control Autom. Syst. 2018, 16, 994–1010. [Google Scholar] [CrossRef]
- Sahu, B.K.; Pati, S.; Mohanty, P.K.; Panda, S. Teaching-learning based optimization algorithm based fuzzy-PID controller for automatic generation control of multi-area power system. Appl. Soft Comput. J. 2015, 27, 240–249. [Google Scholar] [CrossRef]
- Shouran, M.; Anayi, F.; Packianather, M.; Habil, M. Load Frequency Control Based on the Bees Algorithm for the Great Britain Power System. Designs 2021, 5, 50. [Google Scholar] [CrossRef]
- Huang, C.-I.; Lian, K.-Y.; Chiu, C.-S.; Fu, L.-C. Smooth Sliding Mode Control for Constrained Manipulator with Joint Flexibility. IFAC Proc. Vol. 2005, 38, 91–96. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Sun, L. On the Optimized Continuous Nonsingular Terminal Sliding Mode Control of Flexible Manipulators. In Proceedings of the 2014 Fourth International Conference on Instrumentation and Measurement, Computer, Communication and Control, Harbin, China, 18–20 September 2014; pp. 324–329. [Google Scholar] [CrossRef]
- Chen, H.-Y.; Huang, S.-J. Adaptive fuzzy sliding-mode control for the Ti6Al4V laser alloying process. Int. J. Adv. Manuf. Technol. 2004, 24, 667–674. [Google Scholar] [CrossRef]
- Patre, B.M.; Londhe, P.S.; Nagarale, R.M. Fuzzy Sliding Mode Control for Spatial Control of Large Nuclear Reactor. IEEE Trans. Nucl. Sci. 2015, 62, 2255–2265. [Google Scholar] [CrossRef]
- Nair, R.R.; Behera, L. Robust adaptive gain nonsingular fast terminal sliding mode control for spacecraft formation flying. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015; pp. 5314–5319. [Google Scholar] [CrossRef]
- Xu, S.S.-D.; Chen, C.-C.; Wu, Z.-L. Study of Nonsingular Fast Terminal Sliding-Mode Fault-Tolerant Control. IEEE Trans. Ind. Electron. 2015, 62, 3906–3913. [Google Scholar] [CrossRef]
- Hemke, G.D.; Daingade, S. Fast Terminal Sliding Mode based DC-DC Buck converter. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Defoort, M.; Nollet, F.; Floquet, T.; Perruquetti, W. A Third-Order Sliding-Mode Controller for a Stepper Motor. IEEE Trans. Ind. Electron. 2009, 56, 3337–3346. [Google Scholar] [CrossRef]
- Mi, Y.; Fu, Y.; Li, D.; Wang, C.; Loh, P.C.; Wang, P. The sliding mode load frequency control for hybrid power system based on disturbance observer. Int. J. Electr. Power Energy Syst. 2016, 74, 446–452. [Google Scholar] [CrossRef]
- Vrdoljak, K.; Perić, N.; Petrović, I. Sliding mode based load-frequency control in power systems. Electr. Power Syst. Res. 2010, 80, 514–527. [Google Scholar] [CrossRef]
- Kumar, A.; Anwar, M.N.; Kumar, S. Sliding mode controller design for frequency regulation in an interconnected power system. Prot. Control Mod. Power Syst. 2021, 6, 6. [Google Scholar] [CrossRef]
- Guo, J. Application of full order sliding mode control based on different areas power system with load frequency control. ISA Trans. 2019, 92, 23–34. [Google Scholar] [CrossRef]
- Mohanty, B. TLBO optimized sliding mode controller for multi-area multi-source nonlinear interconnected AGC system. Int. J. Electr. Power Energy Syst. 2015, 73, 872–881. [Google Scholar] [CrossRef]
- Huynh, V.V.; Tran, P.T.; Minh, B.L.N.; Tran, A.T.; Tuan, D.H.; Nguyen, T.M.; Vu, P.-T. New Second-Order Sliding Mode Control Design for Load Frequency Control of a Power System. Energies 2020, 13, 6509. [Google Scholar] [CrossRef]
- Huynh, V.V.; Minh, B.L.N.; Amaefule, E.N.; Tran, A.-T.; Tran, P.T. Highly Robust Observer Sliding Mode Based Frequency Control for Multi Area Power Systems with Renewable Power Plants. Electronics 2021, 10, 274. [Google Scholar] [CrossRef]
- Tran, A.-T.; Minh, B.L.N.; Huynh, V.V.; Tran, P.T.; Amaefule, E.N.; Phan, V.-D.; Nguyen, T.M. Load Frequency Regulator in Interconnected Power System Using Second-Order Sliding Mode Control Combined with State Estimator. Energies 2021, 14, 863. [Google Scholar] [CrossRef]
- Pham, D.T.; Ghanbarzadeh, A.; Koç, E.; Otri, S.; Rahim, S.; Zaidi, M. The Bees Algorithm—A Novel Tool for Complex Optimisation Problems. In Intelligent Production Machines and Systems; Elsevier: Amsterdam, The Netherlands, 2006; pp. 454–459. [Google Scholar]
- Pham, D.T.; Castellani, M. A comparative study of the Bees Algorithm as a tool for function optimisation. Cogent Eng. 2015, 2, 1091540. [Google Scholar] [CrossRef]
- Fahmy, A.A. Using the Bees Algorithm to select the optimal speed parameters for wind turbine generators. J. King Saud Univ. -Comput. Inf. Sci. 2012, 24, 17–26. [Google Scholar] [CrossRef] [Green Version]
- Packianather, M.S.; Al-Musawi, A.K.; Anayi, F. Bee for mining (B4M)—A novel rule discovery method using the Bees algorithm with quality-weight and coverage-weight. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 5101–5112. [Google Scholar] [CrossRef]
- Zhou, Z.; Xie, Y.; Pham, D.; Kamsani, S.; Castellani, M. Bees Algorithm for multimodal function optimisation. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 867–884. [Google Scholar] [CrossRef]
- Chamazi, M.A.; Motameni, H. Finding suitable membership functions for fuzzy temporal mining problems using fuzzy temporal bees method. Soft Comput. 2019, 23, 3501–3518. [Google Scholar] [CrossRef]
- Pham, D.T.; Kalyoncu, M. Optimisation of a fuzzy logic controller for a flexible single-link robot arm using the bees algorithm. In Proceedings of the IEEE International Conference on Industrial Informatics (INDIN), Cardiff, UK, 23–26 June 2009; pp. 475–480. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Definition | Values in Area 1 | Values in Area 2 |
|---|---|---|---|
| R | Regulation constant | 0.05 MW/Hz | 0.0625 MW/Hz |
| B | Frequency bias | 20.6 Hz/MW | 16.9 Hz/MW |
| D | The ratio of change in load to change in frequency | 0.6 | 0.9 |
| H | System inertia time constant | 5 | 4 |
| Governor time constant | 0.2 s | 0.3 s | |
| Turbine time constant | 0.5 s | 0.6 s | |
| T | Synchronization coefficient | 2 | |
| F | Frequency of the system | 60 Hz | |
| SLP | Step Load Perturbation | 0.2 pu | |
| n | m | e | nep | nsp | ngh |
|---|---|---|---|---|---|
| 30 | 12 | 6 | 11 | 7 | 0.011 |
| Controller | Parameters | |||||
|---|---|---|---|---|---|---|
| SMC | Controller gains of area 1 | |||||
| 1.4921 | 0.0309 | 0.1353 | 1.9007 | 1.7275 | 0.0029 | |
| Controller gains of area 2 | ||||||
| 1.8411 | 1.9269 | 0.8824 | 1.8353 | 0.0560 | 1.5275 | |
| Controller | Controller Gains of Area 1 | Controller Gains of Area 2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Fuzzy PID [14] | ||||||||
| 1.9857 | 1.9968 | 1.687 | 1.9876 | 1.3469 | 1.5512 | 0.809 | 0.5043 | |
| PID [7] | ||||||||
| 0.939 | 0.7998 | 0.5636 | 0.5208 | 0.4775 | 0.708 | |||
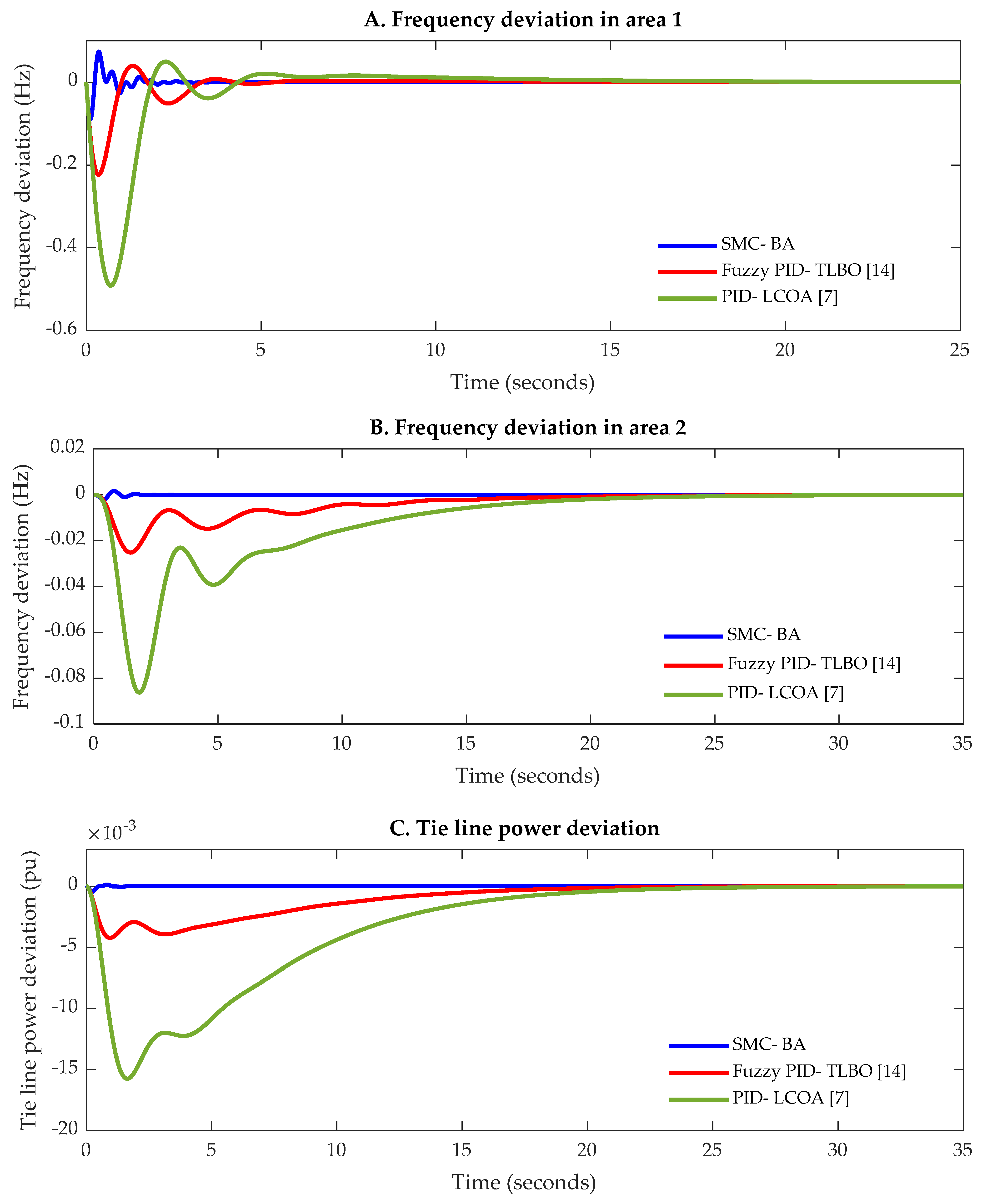
| Controller | Frequency in Area 1 | Frequency in Area 2 | Tie Line Power Deviation | ITAE | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| SMC-BA | −0.0746 | 0.0495 | 2.323 | −0.0016 | 0.0005 | 2.469 | −0.0003 | 0.00005 | 2.0377 | 0.0003 |
| Fuzzy PID-TLBO | −0.1885 | 0.0035 | 4.9849 | −0.0190 | 0 | 25.0325 | −0.0042 | 0 | 24.748 | 0.3305 |
| PID-LCOA | −0.4288 | 0.0154 | 11.795 | −0.0664 | 0 | 21.6623 | −0.0134 | 0 | 22.689 | 0.7920 |
| Case Number | Parameters | Nominal Values | Variation Range | New Values | ||
|---|---|---|---|---|---|---|
| Area 1 | Area 2 | Area 1 | Area 2 | |||
| Case 1 | H | 5 | 4 | +40% | 7 | 5.6 |
| Case 2 | Tt | 0.5 | 0.6 | +40% | 0.70 | 0.84 |
| Case 3 | B | 20.6 | 16.9 | −40% | 12.36 | 10.14 |
| Case 4 | D | 0.6 | 0.9 | −40% | 0.36 | 0.66 |
| Case 5 | Tg | 0.2 | 0.3 | +40% | 0.28 | 0.42 |
| Case 6 | R | 0.05 | 0.0625 | +40% | 0.07 | 0.0875 |
| Case 7 | Tg | 0.2 | 0.3 | +40% | 0.28 | 0.42 |
| D | 0.6 | 0.9 | −40% | 0.36 | 0.66 | |
| Case 8 | Tt | 0.5 | 0.6 | +40% | 0.70 | 0.84 |
| B | 20.6 | 16.9 | −40% | 12.36 | 10.14 | |
| Case 9 | Tg | 0.2 | 0.3 | +40% | 0.28 | 0.42 |
| Tt | 0.5 | 0.6 | −40% | 0.30 | 0.36 | |
| B | 20.6 | 16.9 | −40% | 12.36 | 10.14 | |
| Case 10 | B | 20.6 | 16.9 | −40% | 12.36 | 10.14 |
| H | 5 | 4 | +40% | 7 | 5.6 | |
| R | 0.05 | 0.0625 | −40% | 0.03 | 0.0375 | |
| D | 0.6 | 0.9 | −40% | 0.36 | 0.66 | |
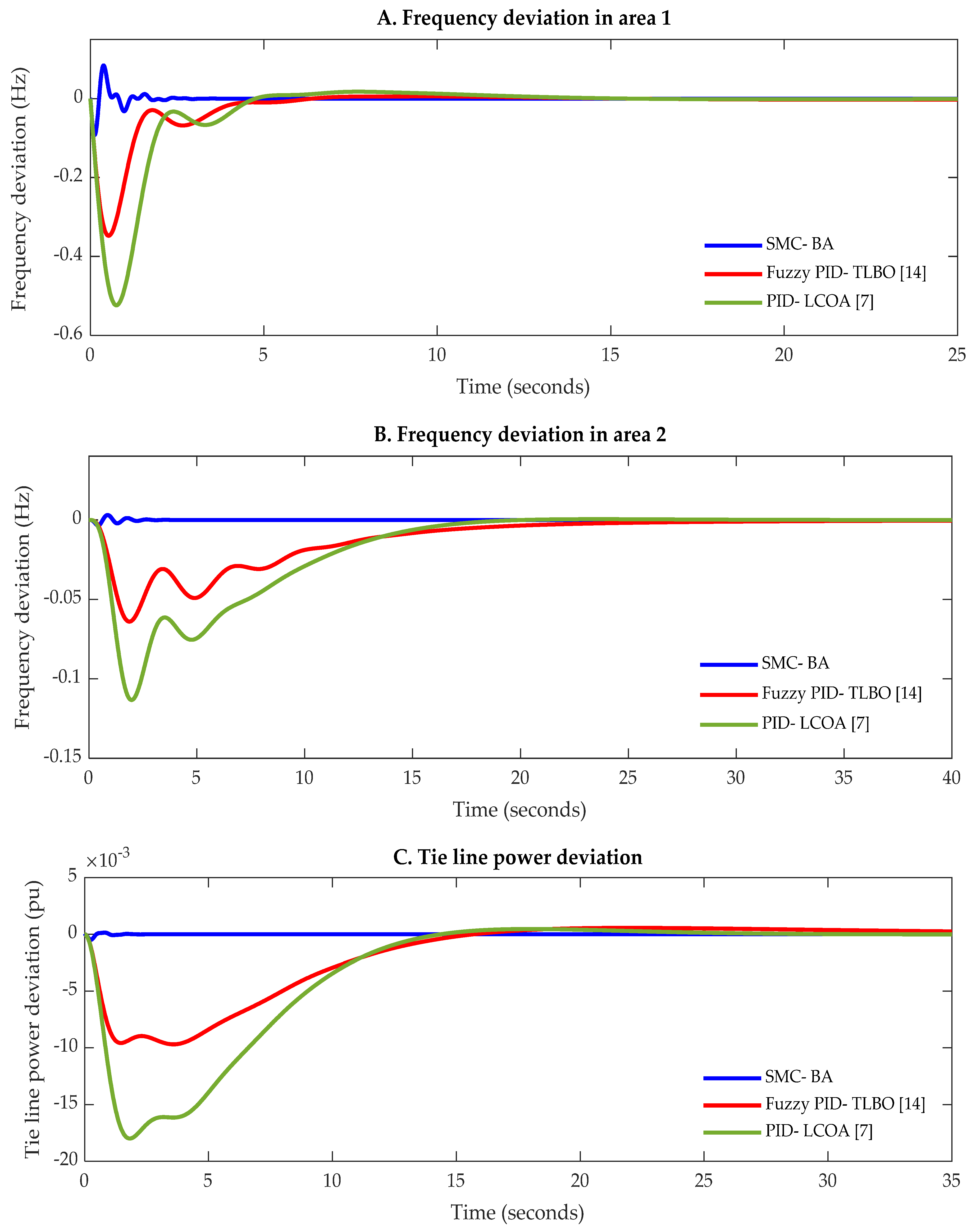
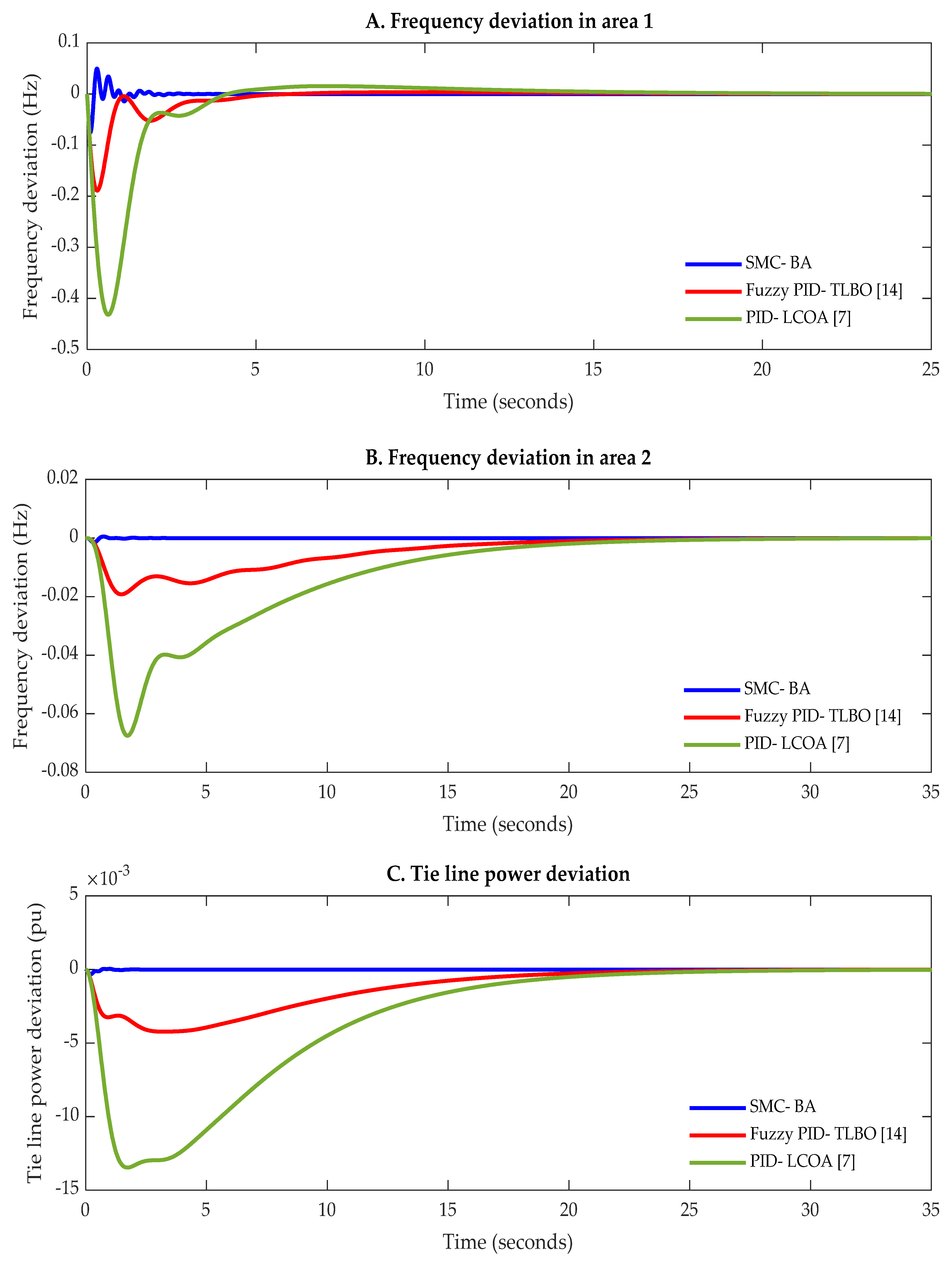
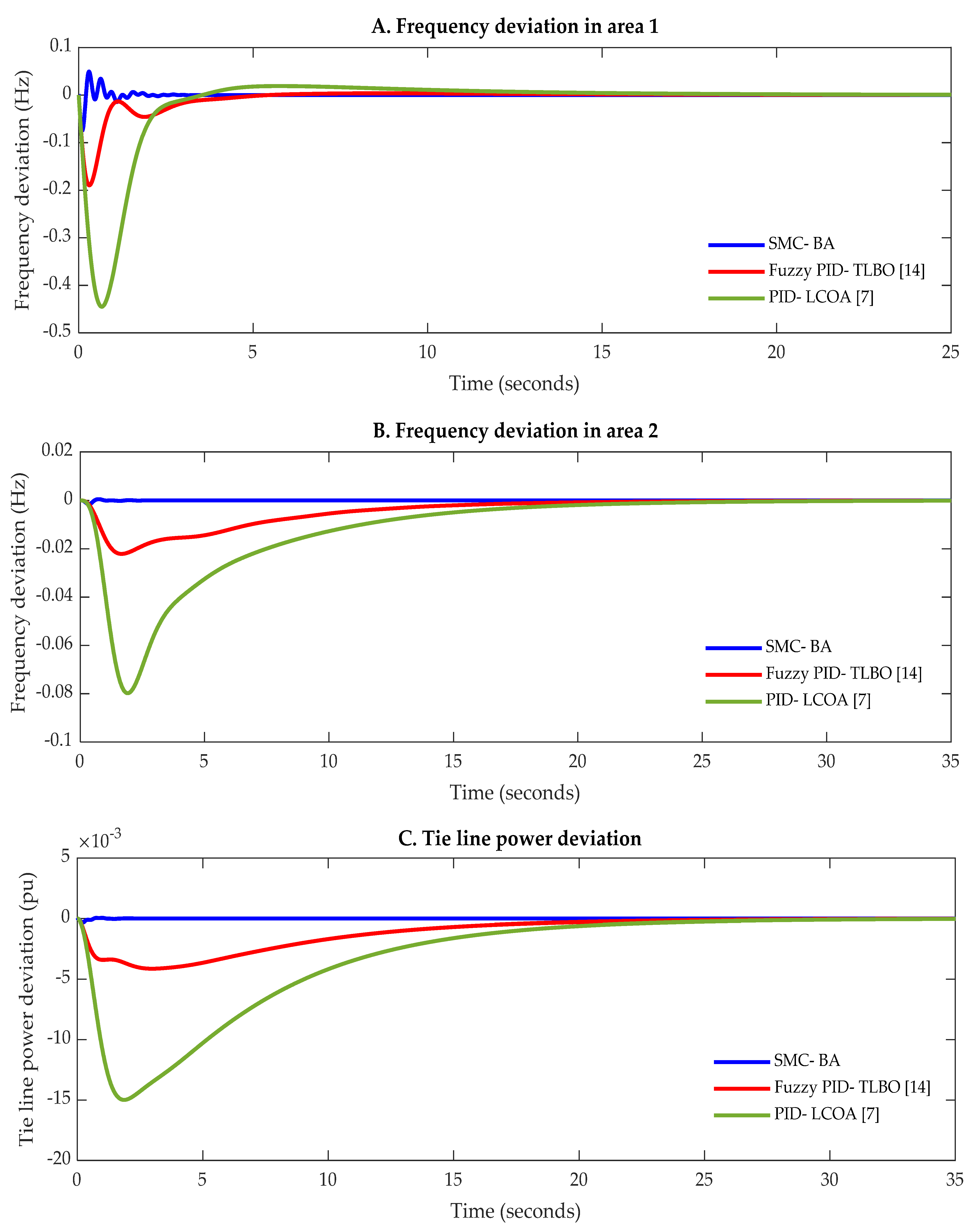
| Case Number | Controller | Frequency in Area 1 | Frequency in Area 2 | Tie Line Power Deviation | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Case 1 | SMC-BA | −0.0613 | 0.0491 | 2.5551 | −0.0014 | 0.0094 | 2.3499 | −0.0003 | 0.00008 | 2.5182 |
| Fuzzy PID-TLBO | −0.2180 | 0.0056 | 12.213 | −0.0326 | 0 | 23.914 | −0.0067 | 0 | 24.501 | |
| PID-LCOA | −0.3758 | 0.0165 | 12.408 | −0.0669 | 0 | 21.545 | −0.0146 | 0 | 22.428 | |
| Case 2 | SMC-BA | −0.0885 | 0.0740 | 2.6330 | −0.0022 | 0.0016 | 3.1974 | −0.0004 | 0.0001 | 2.5101 |
| Fuzzy PID-TLBO | −0.2234 | 0.0390 | 4.0000 | −0.0252 | 0 | 22.329 | −0.0042 | 0 | 22.469 | |
| PID-LCOA | −0.4917 | 0.0491 | 11.007 | −0.0863 | 0 | 20.3628 | −0.0157 | 0 | 21.552 | |
| Case 3 | SMC-BA | −0.0918 | 0.0840 | 2.4372 | −0.0035 | 0.0030 | 3.5679 | −0.0004 | 0.00014 | 2.3491 |
| Fuzzy PID-TLBO | −0.3476 | 0.0057 | 5.6151 | −0.0640 | 0 | 26.840 | −0.0097 | 0.00056 | 34.459 | |
| PID-LCOA | −0.5240 | 0.0176 | 10.730 | −0.1133 | 0.0005 | 17.187 | −0.0180 | 0.00046 | 20.744 | |
| Case 4 | SMC-BA | −0.0747 | 0.0496 | 2.3248 | −0.0016 | 0.0005 | 2.4699 | −0.0003 | 0.00005 | 2.0371 |
| Fuzzy PID-TLBO | −0.1890 | 0.0035 | 4.9709 | −0.0192 | 0 | 24.814 | −0.0042 | 0 | 24.933 | |
| PID-LCOA | −0.4319 | 0.0155 | 11.743 | −0.0675 | 0 | 21.596 | −0.0135 | 0 | 22.753 | |
| Case 5 | SMC-BA | −0.0874 | 0.0788 | 3.6971 | −0.0021 | 0.0014 | 3.9541 | −0.00043 | 0.00012 | 3.0577 |
| Fuzzy PID-TLBO | −0.2146 | 0.0403 | 4.6644 | −0.0212 | 0 | 23.693 | −0.0041 | 0 | 23.645 | |
| PID-LCOA | −0.4714 | 0.0165 | 11.247 | −0.0778 | 0 | 20.910 | −0.0144 | 0 | 22.188 | |
| Case 6 | SMC-BA | −0.0746 | 0.0492 | 2.3229 | −0.0016 | 0.0005 | 2.4716 | −0.00032 | 0.00005 | 2.0446 |
| Fuzzy PID-TLBO | −0.1897 | 0.0036 | 4.6915 | −0.0221 | 0 | 23.011 | −0.0042 | 0 | 26.826 | |
| PID-LCOA | −0.4450 | 0.0188 | 11.133 | −0.0798 | 0 | 20.904 | −0.0150 | 0 | 23.725 | |
| Case 7 | SMC-BA | −0.0875 | 0.0792 | 3.7032 | −0.0021 | 0.0015 | 3.9606 | −0.00043 | 0.00012 | 3.0666 |
| Fuzzy PID-TLBO | −0.2152 | 0.0415 | 4.6671 | −0.0215 | 0 | 23.395 | −0.0042 | 0 | 23.753 | |
| PID-LCOA | −0.4750 | 0.0175 | 11.183 | −0.0793 | 0 | 20.832 | −0.0145 | 0 | 22.242 | |
| Case 8 | SMC-BA | −0.1087 | 0.1316 | 2.5614 | −0.0047 | 0.0059 | 5.0311 | −0.00067 | 0.00044 | 2.8036 |
| Fuzzy PID-TLBO | −0.4015 | 0.0520 | 8.5691 | −0.0805 | 0 | 24.406 | −0.0114 | 0.00056 | 32.293 | |
| PID-LCOA | −0.5931 | 0.0730 | 9.8592 | −0.1435 | 0.0005 | 16.687 | −0.0210 | 0.00051 | 20.342 | |
| Case 9 | SMC-BA | −0.0835 | 0.0681 | 2.5323 | −0.0029 | 0.0018 | 2.28390 | −0.00039 | 0.0001 | 2.4348 |
| Fuzzy PID-TLBO | −0.3161 | 0.0060 | 10.054 | −0.0555 | 0 | 28.4522 | −0.01030 | 0.0005 | 34.399 | |
| PID-LCOA | −0.4820 | 0.0165 | 11.008 | −0.0975 | 0.0004 | 17.5005 | −0.01670 | 0.0004 | 20.884 | |
| Case 10 | SMC-BA | −0.0750 | 0.0872 | 2.5095 | −0.0029 | 0.0031 | 4.58160 | −0.00045 | 0.00024 | 2.4077 |
| Fuzzy PID-TLBO | −0.3125 | 0.0060 | 12.6461 | −0.0476 | 0 | 39.4405 | −0.01090 | 0.00135 | 41.302 | |
| PID-LCOA | −0.4094 | 0.0124 | 12.4555 | −0.0715 | 0.0010 | 20.7551 | −0.01590 | 0.00140 | 27.769 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shouran, M.; Anayi, F.; Packianather, M. The Bees Algorithm Tuned Sliding Mode Control for Load Frequency Control in Two-Area Power System. Energies 2021, 14, 5701. https://doi.org/10.3390/en14185701
Shouran M, Anayi F, Packianather M. The Bees Algorithm Tuned Sliding Mode Control for Load Frequency Control in Two-Area Power System. Energies. 2021; 14(18):5701. https://doi.org/10.3390/en14185701
Chicago/Turabian StyleShouran, Mokhtar, Fatih Anayi, and Michael Packianather. 2021. "The Bees Algorithm Tuned Sliding Mode Control for Load Frequency Control in Two-Area Power System" Energies 14, no. 18: 5701. https://doi.org/10.3390/en14185701
APA StyleShouran, M., Anayi, F., & Packianather, M. (2021). The Bees Algorithm Tuned Sliding Mode Control for Load Frequency Control in Two-Area Power System. Energies, 14(18), 5701. https://doi.org/10.3390/en14185701