1. Introduction
Fluid power drives are able to generate very large forces measured in thousands of kN. They are used in many heavy industrial machines to form thick, tough metals. Electrohydraulic drives are also applied for lifting and lowering elements with high masses, reaching many tons. Another area of their applications is mobile working machines used for example in the mining industry or in robotic excavation devices. An electrohydraulic servo drive system consists of a hydraulic power supply, control element (valve, sensor, controller), actuator (cylinder, motor) and connection elements (pipelines). Currently, there are three main concepts of the construction of linear electrohydraulic drives [
1,
2,
3]:
- (a)
Displacement control, in which the adjustable pump or electric motor with velocity control is used to change the flow to the hydraulic motor;
- (b)
Resistive control, in which the valve changes the flow to the motor;
- (c)
Load sensing, in which the fluid parameters are adjusted to the load.
The last solution is a combination of the two previous systems. However, the load-sensing solution is complex and the most expensive. Therefore, from the energy viewpoint, the pump/motor system is preferred, but it is characterized with low dynamics and low accuracy. For accuracy reasons, the valve-controlled solution is the best.
The efficiency of the electrohydraulic servo drives working in a resistive i.e., valve-controlled mode is low. To improve this problem, several new concepts are proposed in the literature. For example, in [
4], the individualization of electrohydraulic drives is proposed. A cost-effective and robust solution for a highly efficient electro-hydraulic actuator for linear drives is also described in [
5]. These drives may be successfully applied in vehicles. In the paper [
6], the development of an energy-efficient low-power 600 W stepper converter is proposed. It consists of a hydraulic cylinder piston unit controlled by a fast-switching valve, which delivers fluid in pulses. As a result, the cylinder makes a small, incremental motion, which is controlled. However, the article only focuses on energy saving, and no research has been undertaken on velocity control or positioning. The solutions mentioned above do not guarantee the parameters required in robots or machine tools, such as positioning accuracy or high dynamics.
The electrohydraulic servo drives can obtain high speed movements and high positioning accuracy. To achieve both these parameters, the electrohydraulic valves (EHV) are used. The properties and advantages of electrohydraulic actuators and their applications are described by many authors, for example in [
7,
8,
9,
10]. Usually in EHV, the low displacement but high dynamic electromechanical actuators are used. In the valves produced today, such transducers as torque motors or proportional electromagnets are most commonly used. The first electrohydraulic servo valves have been developed in the early 1950s. They have paved the way for the design of highly precise electrohydraulic servo drives. However, the high exploitation requirements are a common problem preventing their widespread use. What is more, the price of the servo valve is high. In response to this problem, in the late 1970s, the proportional control valves (PCV) have been developed. They are significantly cheaper than servo valves, but their parameters are worse. Despite this, the proportional valves have been accepted for many industrial applications. Therefore, they provided a way to design simple, strong, and low-cost industrial-fit electrohydraulic servo drives. In many cases, they ensure sufficient speed and positioning accuracy. Therefore, the proportional valves are currently the most commonly used in electrohydraulic drives in industrial applications [
11,
12]. To control each electrohydraulic valve, a computer-based control system must be used. Nowadays, these electronic systems are directly implemented into the valve. Their design requires the close cooperation of basic mechanical elements with an electromechanical actuators, sensor, and control system. Therefore, such valves can be a good example of a mechatronic device.
The phenomena in both valves and cylinders are described by nonlinear equations, and therefore, in order to obtain high precision in movements and in positioning, advanced control methods must be used. Therefore, for many years, intensively advanced computer controls have been introduced into electrohydraulics. Thanks to the applications of advanced electronics, modern electrohydraulic servo drives can be regarded today as not only “strong” but also “precise”.
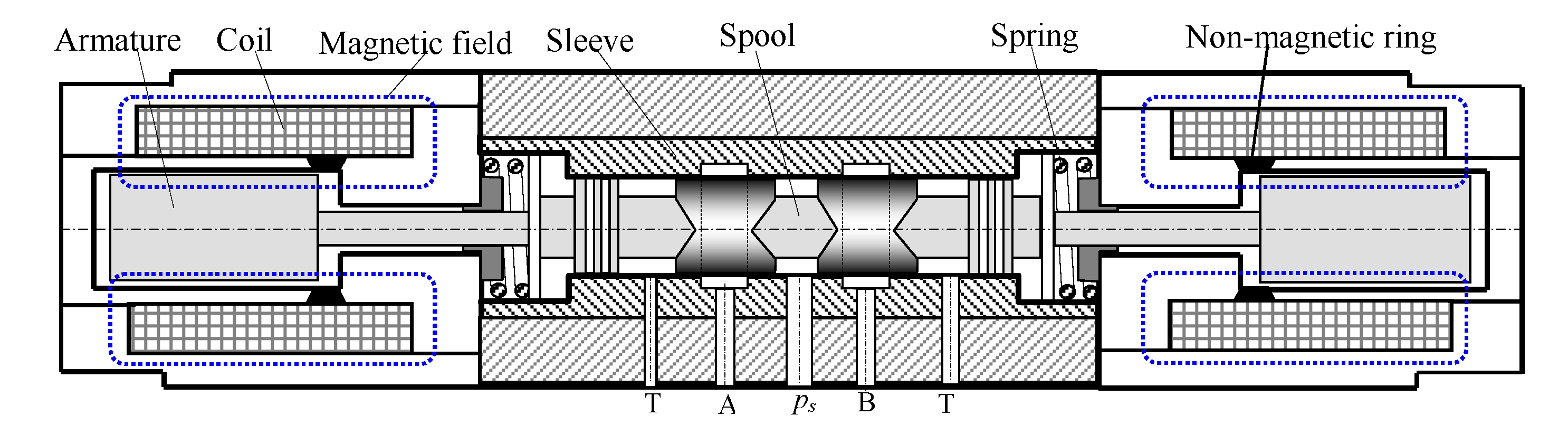
A typical proportional directional control valve is shown in
Figure 1. It consists of two DC electromagnets in which two armatures are used. Each of them is designed to move a spool located in a sleeve in different directions, e.g., to the left and to the right. The spool is centered with two springs. In the valve, there are four connection ports:
ps (supply pressure), A and B (connected to cylinder chambers), and T (tank). In the typical proportional valve, the spool and sleeve are made in such a way that when the spool is displaced in the sleeve, triangular-shaped orifices open through which the oil can flow. Usually, the valve is an overlap type, which means that a certain distance is needed to move the slider before the gaps would open. The spool is moved in proportion to the electrical input current given to the valve coils. In response to the supply current, the spool moves change the cross-section areas of the working gaps, thus enabling control of the flow from the supply to the cylinder chamber and from the second chamber to the tank. Proportional control valves can provide a smooth and continuous variation in flow or pressure in response to an electrical input signal. In applications of electrohydraulic drives in which acceleration and deceleration under control are required, proportional valves are used as controllable flow suppliers, working in the open loop. In these cases, the pressure and flow need to change continuously. Thanks to this, the multiple fixed flow and pressure valves can be replaced with a single proportional valve.
Nowadays, proportional electromagnets are commonly used in the proportional spool valves available on the market. However, there are no publications on the energy consumption of this type of valve in the literature. In the article [
13], the analyses of some system solutions for mobile and industrial applications with regard to energy-saving possibilities are described. The valve and the pump-controlled mobile systems, as well as the use of accumulators for energy storage and energy recovery are analyzed, showing the potential of a 20–50% reduction of energy consumption.
In paper [
14], the digital hydraulic valve system is considered in terms of energy consumption. However, the digital hydraulic valve system consists of several parallel connected on/off-valves, which are significantly different from the single-valve solution considered in this article. Such valve system cannot assure precise control of the servo drive.
In paper [
15], the authors published the results of the energy efficiency of an hydraulic drive controlled by the proportional valve and by the digital valve system. The second solution showed energy savings exceeding 20%. However, the system flexibility and accuracy were lower.
In paper [
16], a dual-supply pressure system used for the reduction of energy consumption was presented. The studies of the energy-saving adaptive robust precision motion control of a single-rod hydraulic cylinder were described in [
17], using as many as five proportional cartridge valves. The electric power of one typical electromagnet used in a proportional valve is in the range of 20 to 50 W. Usually, two such electromagnets are applied in the valve. At least one of them must be energized at all times while the valve is open. Over the last few years, several other solutions have been tested. In the literature, the application of piezo actuators [
18] or the permanent magnet synchronous motors in the electrohydraulic valves can be found [
19,
20]. An interesting example is also a design that uses a stepping motor instead of an electromagnet [
21]. In the paper [
22], the application of the stepping motor in a servo valve with individually adjustable metering edges is described. The stepping motor replaces the conventional proportional solenoid. Its electric power was about 6 W, which is significantly less than the electromagnet power supply. The motor is used for turning of the valve shaft, thus for displacing the center body of the valve. The four individually adjustable spools are attached to its body, each providing one metering edge. The described solution is commercially offered as a complete servo actuator [
23], which can be used in machine tools for linear and rotary movements. Another valve for mobile applications that has an embedded stepper motor used to directly drive a valve spool with four individually adjustable metering edges is depicted in [
24]. In this valve, the stepper motor drives the spool via a toothed bar. The application of a stepper motor offers the advantage that no spool displacement sensor is necessary. Other applications of stepper motors in electrohydraulic drives are also described in [
25,
26].
This article considered the power losses on an electrohydraulic valve with stepping motors. The valve is used in the servo drive powered with the constant pressure.
2. Materials and Methods
2.1. The Electrohydraulic Valves with Stepping Motors
At Poznan University of Technology, a few hydraulic proportional flow valves with stepper motors have been designed and developed. In paper [
27], the linear actuator with stepping motor and mechanical feedback is presented. The drawing of the valve used in another investigation is shown in
Figure 2 [
28].
In this valve, instead of solenoids, a stepping motor (1) is used, which is connected with an elastic clutch (2) to the spool (3) located in a valve sleeve. On the other side (left) of the valve, the spool is ended with a threaded shaft (4), which is screwed into the element (5). Thanks to this screw connection, the rotational movement turns into linear, and as a result, the spool linear displacement is proportional to the number of steps made by the stepping motor. The shifting of the spool results in opening or closing of the triangular gaps (6) between the spool and a sleeve (7). The valve body has grooves (8) machined on a drill, which connect the valve windows. The hydraulic inputs and outputs (9) are as follows: ps—supply pressure; T—tank; A, B—cylinder ports (chambers). The position of the stepping motor rotor is measured by an encoder (10).
This solution allows for a very precise control of the valve spool displacement, which enables precise velocity control and positioning of the cylinder. However, in order to obtain them, a low oil flow must be assured, which means that small slider shifts i.e., of the order of few μm, must be made. Then, the problem is the contamination particles, which can close (block) the small valve gaps. To avoid this, the stepping motor can make fast small left and right displacements. Moreover, in the valve described here, the windows (gaps) are triangular in shape with small positive overlaps. Such a valve can obtain very low flow and good positioning accuracy; thus, it can be applied in precise low-velocity electrohydraulic drives. The edges of the spool lands and the grooves in the bore are machined to a vanishing small radius, so the orifice that is formed by the displacement of the spool on the bore has sharp edges. In such a valve, the groove width and the land width are matched, so leakage of the flow and dead band at the centered position are minimized. The proportional valve described above cannot be successfully used in drives with the requirements of obtaining higher speed, e.g., more than 10 mm/s. Therefore, in order to improve the dynamics and the accuracy, in the next solution, the three-land spool with rectangular gaps in a sleeve are used. The sleeve-spool of such a valve is shown in
Figure 3, in which there are three lands with a diameter of 10 mm. The spool-sleeve is made as almost zero lapped.
Additionally, the application of two stepping motors working differentially is proposed and described in [
29]. The drawing of the proportional valve in which two stepping motors are applied is shown in
Figure 4. This valve is used in considerations regarding energy losses and their possible reduction.
The edges of the central landing (8) open and close the valve gaps between the supply port (10) and one of the cylinder chambers A and B. Lateral landings (9) open and close the gaps between the hydraulic cylinder chambers and tank. The stepping motor (1) is connected with the elastic clutch with a diameter of 10 mm (2), which is connected to the valve spool from the other side (3). This motor is used to rotate the spool (8), which at the end is connected to a ball screw thread (4). The thread is placed in a nut (5), which is attached to the stepping motor (7). The ball screw nut can rotate because it is placed in the bearing (6) assembled to the valve housing. A ball screw of diameter 8 mm and lead of 2.5 mm is used in the valve. Its preload is adjusted to 5% of the dynamic capacity, which almost completely reduces the play. In the amplifier body, three rectangular gap windows each of 2.5 mm width and 2.0 mm height have been made on both sides of the spool main piston (8); thus, the total valve gap length is equal to 6 mm, and the maximum single orifice area was 15 mm2.
The use of an elastic clutch has enabled the spool to move in an axial direction. In this design, the left motor drives the screw and the right motor drives the nut. If they are rotating in different directions, the spool velocity is equal to the sum of both drive velocities. If they are rotating in the same direction but with different velocities, very low spool movement velocities can be achieved. It is also possible to apply stepping motors with different step angles and with different micro-step modes.
In
Figure 5, the photo of the built valve is shown. In this valve, two bipolar 5-phase stepping motors of type SECM569 are used. Their holding torque is 1.66 Nm (for 1 kHz), and the phase current is equal to 2.8 A. These motors were controlled by two high-power controllers. Typically, both applied stepping motors work with a full step i.e., 0.72 degrees (500 full steps per revolution). In the investigations, motors also working in a half-step (0.36 deg) or in micro-stepping mode (0.09 deg) were used. Theoretically, the maximum frequency of the stepping motors was equal to 20 kHz, but in order to assure obtaining the required output torque, the drives have worked only with the maximum frequency
fmax equal to 4 kHz during the investigations. In a full-step mode, making one step by the motor has meant a 5 µm valve spool linear displacement.
In order to assure the high accuracy of the valve, the micro-stepping mode was used, in which both motors made psm = 4000 steps per one revolution, and one step of the motor resulted in spool linear displacement of only 0.625 µm.
In this paper, the authors focused directly on energy losses in the proposed valve with two stepping motors. At first, the equations describing the properties and parameters of the oil flow through the valve gaps were formulated. Then, the equations describing the power losses in the valve were given. Finally, the investigations of the energy losses during step responses were performed and discussed.
2.2. The Energy Losses in Electrohydraulic Valve
A typical control valve configuration consists of two control ports, and their flow rates are regulated with variable orifices. The expression for the turbulent fluid flow through valve orifices is:
where
αd—discharge coefficient (typically about 0.6),
A(
x) =
L∙x—the area of the valve orifice,
L—length of the orifice around the sleeve circumference,
x—spool displacement,
ρ—fluid density, and Δ
po—the pressure drop on a valve orifice.
If there are no leaks, the valve is symmetrical and the double rod hydraulic cylinder is used; the fluid volumetric supply flow
is equal to both valve orifices flows, cylinder flow, and tank flow: i.e.,
. The pressure drop on both orifices is also the same, i.e.,
; thus, the supply pressure is:
where Δ
pc—the pressure drop on a hydraulic cylinder.
The hydraulic power supplied to the valve and thus to the whole drive is given by:
Assuming that the cylinder is double rod and the valve is symmetrical, the power losses on the input and output orifices are:
- -
for the spool displacement direction to the right, as shown in
Figure 4:
- -
for the spool displacement direction to the left:
where
PSA,
PSB—the power losses between the supply port and port A or B, respectively,
PAT,
PBT—the power losses between port A or B and a tank, respectively,
pA,
pB—pressures on the valve output ports, and
A =
AA =
AB—the area of the valve orifices. The useful power on a cylinder is:
where
Ac—the active cylinder piston area, and
vc—the piston velocity.
The power efficiency of the hydraulic valve-cylinder drive can be expressed as:
For the valve described above, for parameters
ρ = 780 kg/m
3 and
ps = 16 MPa and variable parameters spool displacement
x (0.1 mm, 1 mm, 2 mm, 2.5 mm) and cylinder pressure
pc (6 MPa, 4 MPa, 2 MPa, 1 MPa), the following calculated values are set in
Table 1:
L = 6 mm—orifice length,
Q—flow,
Ps—supply power,
Pg, e.g.,
PSA +
PSB or
PAT +
PBT—power losses on a two valve gaps,
vc—piston velocity, and
η—power efficiency,. The best efficiency is obtained when the flow slots of the valve are as open as possible.
If in the positive overlapped valve, gaps are closed, which means AA = AB =0, the power losses on the valve are caused only by leakages: one from the supply port to port A or B and the other from port B or A to the tank. However, in this case, the gap length is only 3 μm, and its area is very small (about i.e., 30·10−6 mm2). Such a small gap is usually quickly clogged with contamination particles.
In the valve with negative overlap, the biggest leakage flow occurs at zero spool position [
25]. It is a few percent of the rated flow rate. However, if the spool displacement is small, the leakage flow is much larger than the orifice flow. In the paper [
26], the nonlinear servo-valve leakage behavior is described. The flow is modeled as the turbulent flow with a flow area inversely proportional to the overlap between the spool lands and the valve orifices. The power losses on the valve are expressed as below:
where
x0—accounts for the leakage flow rate at null (
x = 0),
ko—determines the flow resistance of the leakage path in the overlap region as a function of spool displacement.
The parameters mentioned above i.e.,
x and
ko, can be calculated using data given in the data sheets or according to the investigation results. The energy losses on the valve are:
The radial gap between the spool and the tube is essentially smaller than the spool length, causing the flow regime to be laminar. This is if the radial gap between the spool and the tube is 3 μm and the displacement of the slider is more than about 1 mm. According to the Hagen–Poiseulle equation, the leakage losses for the spool displacement direction to the right may be expressed as:
where
QlA,
QlB—leakages flow rate,
R—orifice radius,
r—insert radius,
l—overlap length (1 mm), and
μ—fluid viscosity (0.03 Pa·s).
The hydraulic amplifier described here has a radial symmetrical clearance of about 3 μm and symmetrical small positive overlap of 5 μm; therefore, for a supply pressure of 16 MPa, the losses caused by leakage are in a range of 0.05 dm3/min, which is very small.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}