1. Introduction
Development and improvement of sensor technologies and their wireless networking have been the top priority of Internet of Things (IoT) for smart city infrastructure [
1]. The advancements in the sensor and wireless communication technologies have elevated the opportunities to benefit from occupancy and indoor environmental monitoring in buildings [
2]. Building performance monitoring allows optimizing the operation of existing facilities and improving the future designs, in terms of energy efficiency and occupants’ comfort and well-being [
3,
4]. As the sensing technologies become more cost-effective and adaptable, new applications in buildings continuously emerge. For example, occupancy sensors may be used for space use management by providing information about space use which allows to improve the efficiency of using energy and resources [
5]. Occupancy and indoor environmental sensors can be used together to enable solutions such as demand-controlled energy systems [
6], demand response [
7], and behavior change campaigns [
8]. Multiple applications using similar sensing and data infrastructure increase their chance of being economical and facilitate the widespread adoption of sensors in buildings [
6].
Legislative documents by European Union promote smart devices and encourage the adoption of intelligent metering and active control systems in buildings to achieve energy saving [
9]. As the importance of occupancy and indoor environmental monitoring being recognized, building codes would likely consider occupant-related aspects enhancing the adoption of sensing devices [
10]. The trends suggest more stringent requirements in the future towards mandatory adoption of sensing devices [
11]. The technological advancements and various economic, social, and sustainability motives are likely to increase the deployment of sensors in buildings on a broader scale [
2].
There are various types of sensors for occupancy monitoring such as passive infrared (PIR) sensor, infrared array, and ultrasonic sensor [
6,
12]. Similarly, indoor environmental parameters such as temperature, humidity, light, and CO
2 concentration can be measured by different sensor technologies. The positioning of sensors on where they are installed is often flexible and can be adapted to standards such as ASHRAE standard 55 [
13]. Sensor developers provide some guidelines for sensor installation, which are mostly qualitative. For example, PIR sensors, which are commonly used for occupancy monitoring, should be installed on vibration-free surfaces so that they face the main areas of activity, or temperature sensors should be installed distant from heat sources [
14,
15]. The sensor developers might also provide quantitative recommendations by providing a number for coverage area or distance from air vents. However, they rarely provide information about the basis for those recommendations [
15,
16]. To compare such recommendations with building codes, it is found that some recommendations in building codes and standards are likely to be based on anecdotal evidence and experiences as they are often difficult to be traced back to scientific reasoning [
10]. This might also apply to the installation guides from the sensor developers, indicating a knowledge gap on the factors influencing sensor performance related to their installation and positioning.
Some occupancy sensors are integrated as built-in parts of other devices such as thermostats and switches. The positioning of sensors in such cases may be restricted to the designated position of the main device. For example, switches are typically installed on 1 m height, even when they have built-in PIR sensors without an adequate field of view (FOV) in that position [
17]. A similar problem exists for environmental sensors. For example, even with built-in temperature sensors, the thermostats’ typical location is at the height of 1.5 m of the walls, which might contradict the recommendations for placement of temperature sensors in specific spaces [
13,
18]. Numerous studies in the literature propose various applications in buildings for using multiple sensors such as PIR, temperature, CO
2, light level, humidity, and acoustics [
19,
20,
21]. Indoor environmental sensors might be used to monitor their specific aspect of indoor environmental quality (IEQ) to improve building services, or they can be fused for improved occupancy detection [
20,
21]. In the latter case, multiple sensors can compensate for each other’s shortcomings and limitations to improve the reliability of occupancy information without investing in complicated and costly sensors [
6]. Incorporating multiple sensors together within one device can significantly reduce the sensor price, installation cost, size, and power use [
22,
23]. The trend of integrating multiple sensors in a single device can be observed in the emerging applications of IoT in various areas other than building monitoring, such as weather stations, parking monitoring, and military applications [
23]. As the applications for occupancy and indoor environmental monitoring develop, it is becoming more common to use multi-sensor devices in recent studies related to buildings [
24,
25].
Due to benefits such as reduced deployment cost, sensors are becoming battery operated and wireless connected, leading to more flexibility on where and how they can be positioned [
11,
26]. However, the optimum performance of many types of sensors requires specific considerations on their positionings. Choosing an appropriate positioning for light sensors is crucial as their measurements may lead to different implications for controlling lighting systems if they are located too close or too far from sources of natural or artificial light [
27]. Positioning CO
2 sensors away from the office door can significantly improve their applicability for occupancy detection due to high air exchange when the door is open [
17]. Investigations on the performance of PIR sensors in laboratory settings to detect human motion show that factors such as distance to detection target can influence their accuracy [
28,
29]. However, studies on the factors related to the positioning of occupancy and environmental sensors in specific built environments are limited. The scarcity of explicit information on the effect of installation practices on sensor performance contrasts with fairly extensive research on sensor technologies and their various applications in buildings. This gap is likely to cause numerous under-optimized and inadequate installation of sensors that may exacerbate the reliability of monitored data and diminishes the effectiveness of their applications to improve building performance. The research gap in sensor positioning is described by a review study on occupancy detection systems as “an urgent and challenging task requiring further research” [
30].
In any sensor deployment, there would be tradeoffs between measurement accuracy and other factors such as coverage, ease of deployment, potential risk of the sensor being tempered, aesthetics, etc. Deployment of multi-sensor devices requires extra considerations, as suitable positioning might be conflicting between different sensors. In other words, optimal positioning for one sensor may be compromised to avoid unacceptable inaccuracy for other sensors. The data from faulty, misplaced sensors might be improved by data cleaning in a preprocessing stage. However, data reliability from sensors with sub-optimal positioning would be generally diminished [
29,
30]. This implies the need for more systematic exploratory studies of potential influencing factors on the performance of sensing devices in different spaces in built environments.
The influence of occupants on energy use in office spaces is relatively strong, thus, there is a high potential to avail from occupancy and environmental monitoring [
31]. PIR sensors are among the most common sensor types used for occupancy detection in buildings [
32,
33]. The objective of this study is to examine how sensor positioning affects the performance of PIR sensors for occupancy detection in single-occupant offices. Further, the effects of positioning of indoor environmental sensors on their measurements are also investigated. The specific aims of this study are:
Investigating the effects of positioning of PIR sensors on the accuracy of occupancy detection by evaluating the factors such as distance from seated area and exposure to windows.
Investigating the effects of sensor positioning on the accuracy of occupancy detection when fusing (combining) PIR sensor data.
Investigating the effects of sensor positioning on the measurements of indoor environmental parameters, including temperature, relative humidity (RH), CO2 concentration, and illuminance.
This paper’s structure is as follows:
Section 2 presents the literature review on occupancy sensing technologies and the conceptual grounding to evaluate occupancy detection and provides information on indoor environmental sensors and the applications of indoor environmental monitoring.
Section 3 presents the methods and approaches used for data collection and data analysis.
Section 4 presents and discusses the results of the analysis.
Section 5 provides conclusions, limitations of the study, and directions for future research.
4. Results and Discussion
4.1. Effect of Positioning on the Accuracy of PIR Sensors
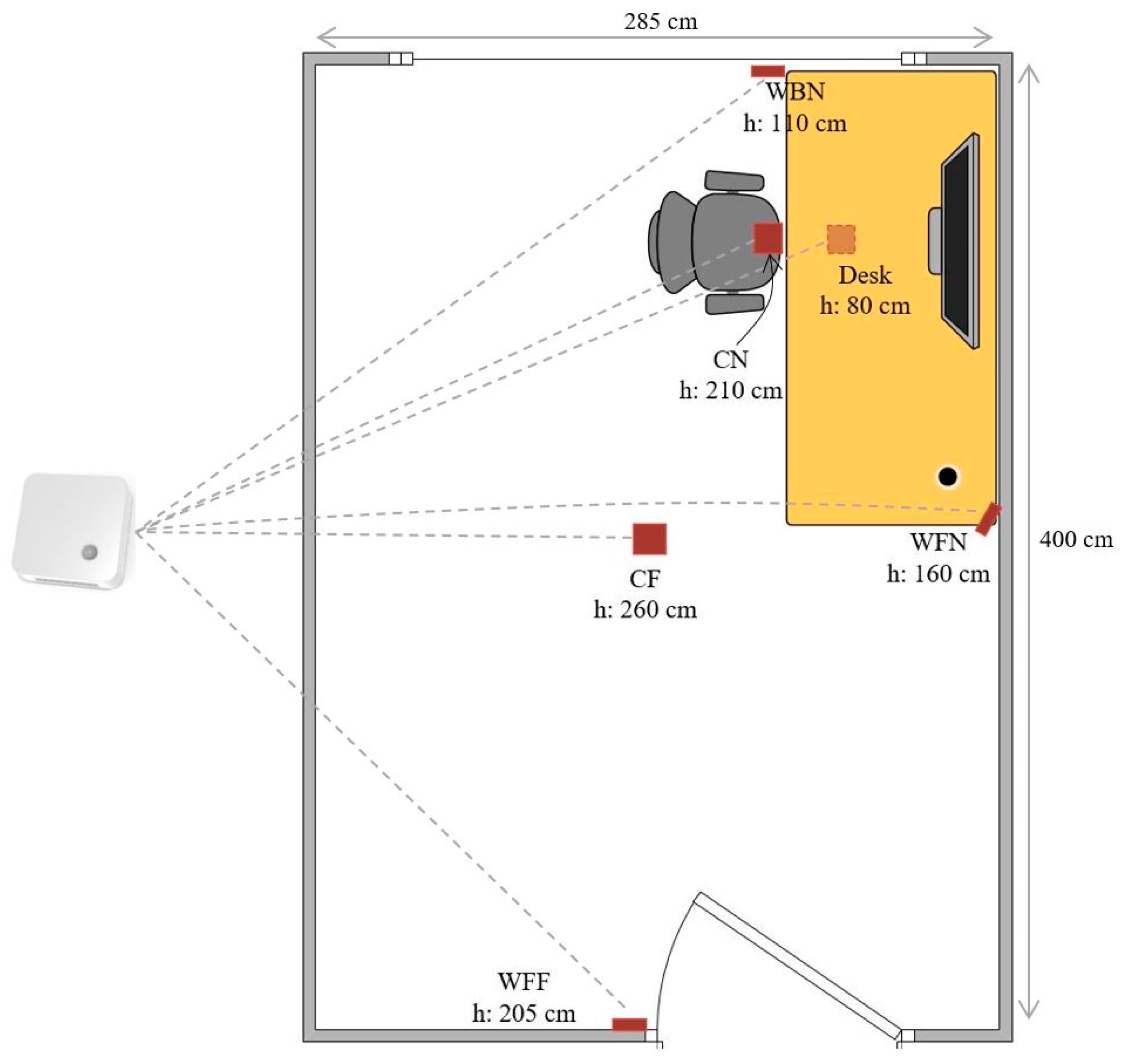
Figure 3 shows the average accuracy of PIR sensors in different positions. The data related to sensors in six positions were collected from the sensors installed in three studied offices. The calculation for overall accuracy includes the data related to both occupied and unoccupied periods. The overall accuracy of sensors ranges from 87% to 95%, with WFN and Desk sensors comprising the lowest and the highest accuracy. Detailed investigations of occupied and unoccupied periods separately can be more informative on the performance of sensors. Absence detection is significantly more accurate than presence detection for all the sensors, with an average of 97% accuracy compared to 68% accuracy for average presence detection. The WFF sensor with 51% has the lowest presence detection accuracy. The Desk sensor provides the most accurate presence detection with 84% accuracy. The sensors provide relatively similar accuracy for absence detection. Apart from the WFN sensor, which has 90% accuracy of absence detection, the accuracy of the rest of the sensors are fairly close to each other in a range between 96% and 99%. The relatively lower absence detection accuracy by the WFN sensor could be due to two reasons. The proximity of this sensor to the window and its orientation towards the window causes it to be more exposed to solar radiation and solar-heated surfaces.
The results show that accurate presence detection is more challenging for PIR sensors as compared to absence detection. The sensor performance on detecting presence is dependent on the detection of occupants’ motions. Motion detection can be affected by various factors related to positioning, including distance (to detection target) and ambient infrared radiation from windows.
Table 1 shows the distance of different sensors to the only chair in the office. Henceforth, the distance of sensors from the chair is briefly referred to as “distance of sensor”. The occupants are researchers at university, and their main activities include working with their computers while sitting on a chair. The results show the significant effect of the sensor’s distance to the seated area on the accuracy of presence detection, indicating that the occupants mostly spend their time sitting on the chair. Comparing sensors’ accuracy in different distances is more reasonable when the sensors face the occupants from a similar direction to ensure they capture similar motions. Two pairs of sensors with fairly similar directions to the occupants are CN-CF and WFN-WFF. Comparing their accuracy of presence detection in relation to their distance to the seated area shows the accuracy drops by 13% for every 1 m of more distance, although the sensor developer recommends 5 m range of detection. It is worth noting that CF and CN sensors have different angles of view towards the seated area, which may affect their sensitivity on motion detection in that area. However, based on the sensors’ specifications (
Appendix A) and the installation settings (sensor height and office dimensions), it is ensured that the detection sensitivity is not significantly different between those two angles of views in the case study offices.
The only outlier result is related to WBN, which has an accuracy of only 59%, although, considering the distance from the seated area, it was expected to have an accuracy close to WFN, which has a higher accuracy of 77%. One reason for the difference can be the effect of sunlight (which includes radiation in the infrared spectrum) and absorbed heat (thereby emitting infrared radiation) by the surfaces in its FOV, causing difficulty in distinguishing the occupant’s motion. This may increase the possibility of false negative error in WBN. Another reason can be the orientation of this sensor towards the occupants’ shoulder side, limiting its view to some parts of his/her body. This problem may be exacerbated by the proximity of the sensor to the occupants. WBN is positioned very close to the occupant, where it may not have an appropriate view of the parts of the occupant’s body such as the head and legs of the occupants, which have a high potential of motions.
In addition to distance and exposure to windows, the orientation of a PIR sensor with respect to the occupant affects the possibility of detecting different occupants’ motions. This geometrical complexity is mainly related to the angle of view to the occupant, which can improve the sensor exposure to specific motions. For example, a PIR sensor positioned on the ceiling has the view of occupants from a completely different angle compared to a wall-mounted sensor. The FOV of the Desk sensor allows only the detecting of the motions from the lower parts of the occupants’ body, which are mostly concealed by the desk for all of the other sensors. Another example of the orientation effect is when a sensor is positioned on the backside of an occupant while the seatback might obscure most of the motions of a seated occupant.
4.2. Fusion of PIR Sensors in Various Positions
As discussed in the previous section, the Desk sensor offers the most accurate occupancy detection. However, this result may vary in offices with additional furniture or when the occupants do not spend their time in the office seated in front of their desk. Accordingly, the Desk sensor may be sensitive to the alternative work styles and seating positions. Based on our observations, the following limitations may hinder the application of the Desk sensor for occupancy detection in offices:
The FOV is limited to the area in front of the desk.
The FOV can be easily blocked with the chair when the occupants are not seated.
It is positioned under the desk, which makes it susceptible to displacement by unintentional physical contact.
Nevertheless, avoiding the Desk position due to the above limitations may be an oversight as the analysis shows the sensor in this position has a relatively high detection accuracy when the occupants work in front of their desk. Moreover, other sensor positions also have limitations that can negatively affect detection accuracy in specific contexts. One way to take advantage of the relatively accurate sensors despite their occasional inaccuracy is to fuse (combine) the data from different sensors to enhance occupancy detection. In this approach, multiple PIR sensors are used simultaneously to compensate for the limitations of an individual sensor. Sensor fusion is investigated by analyzing the datasets of various pairs of PIR sensors to find out the potential improvements in detection accuracy.
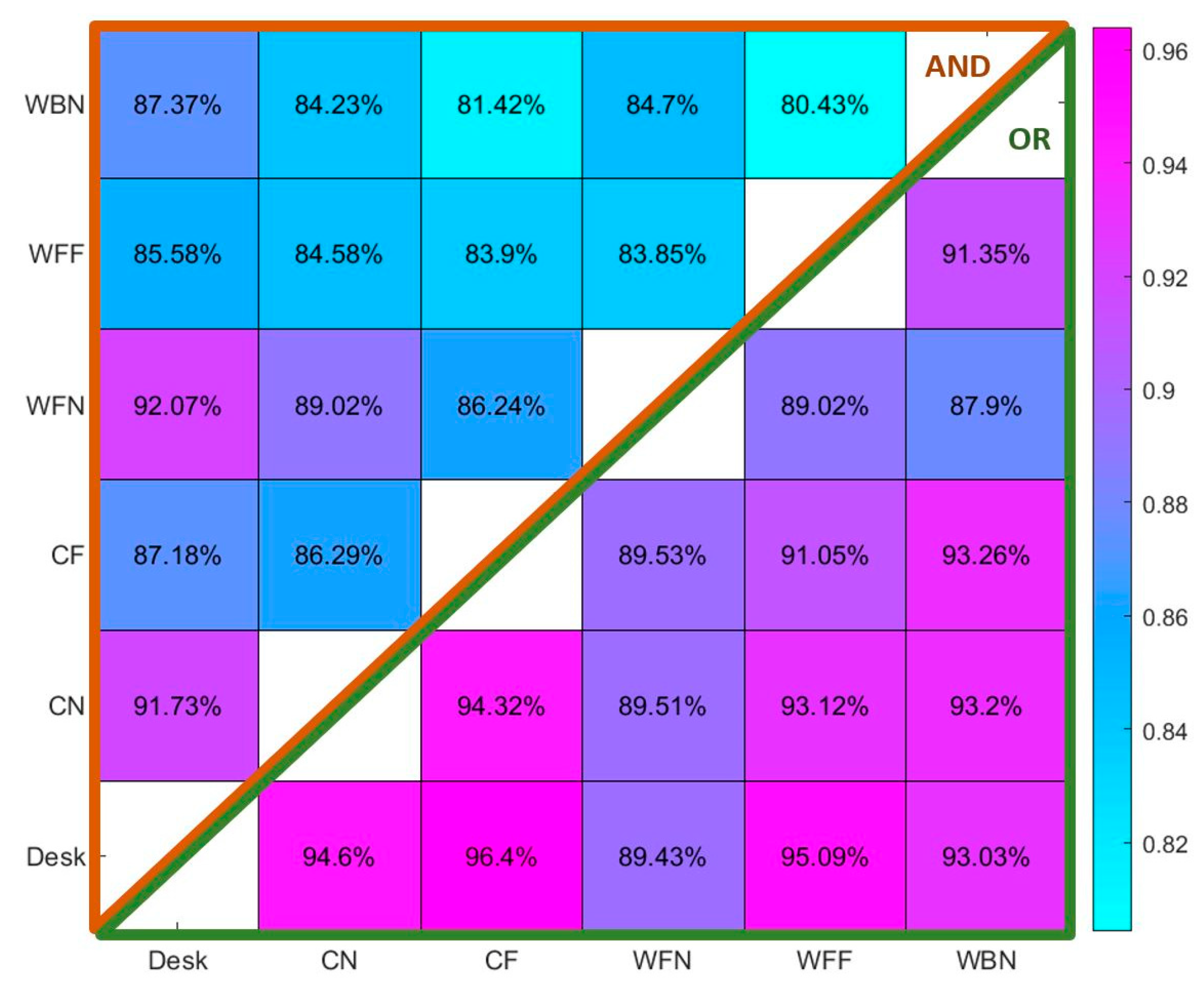
Figure 4,
Figure 5 and
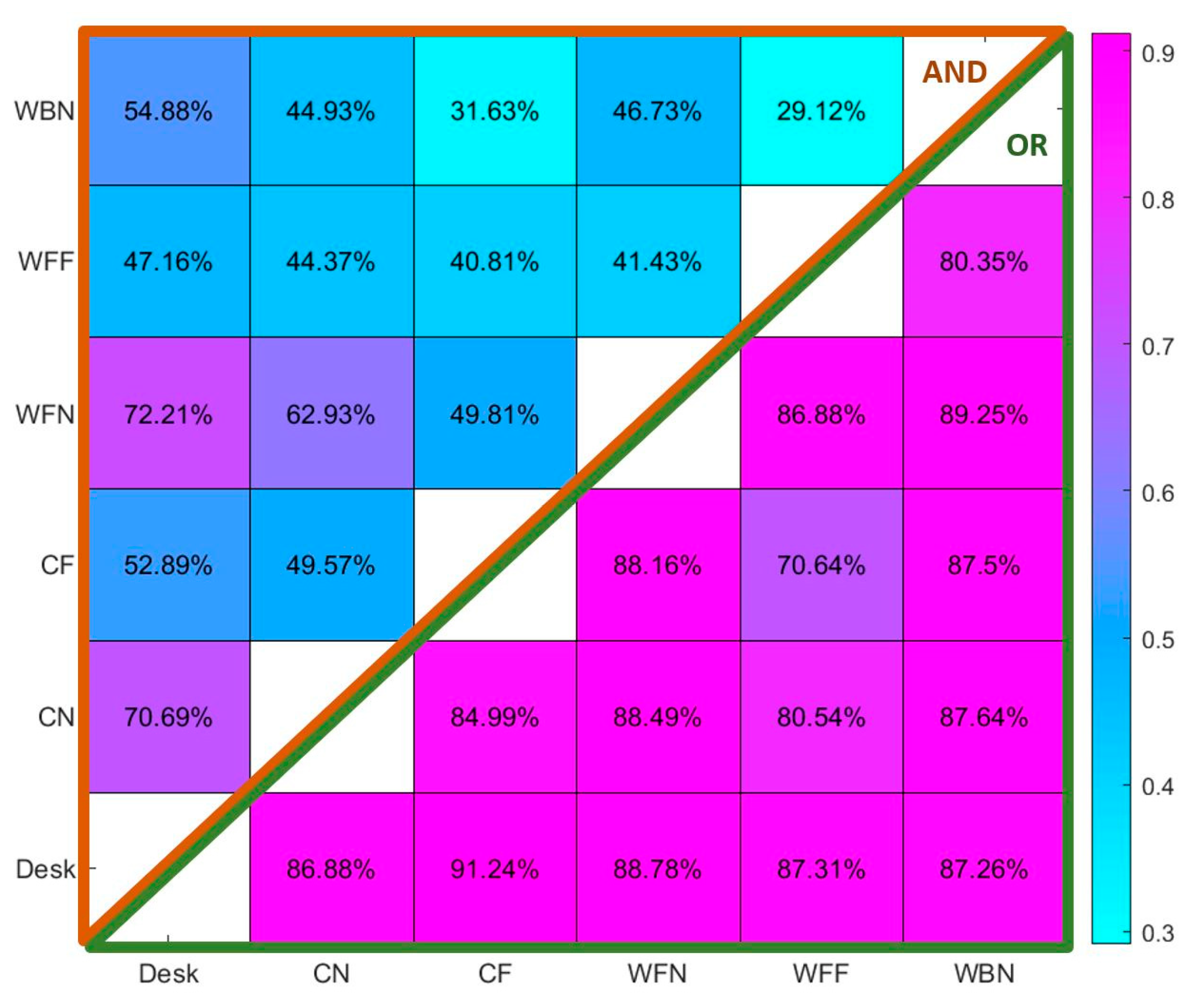
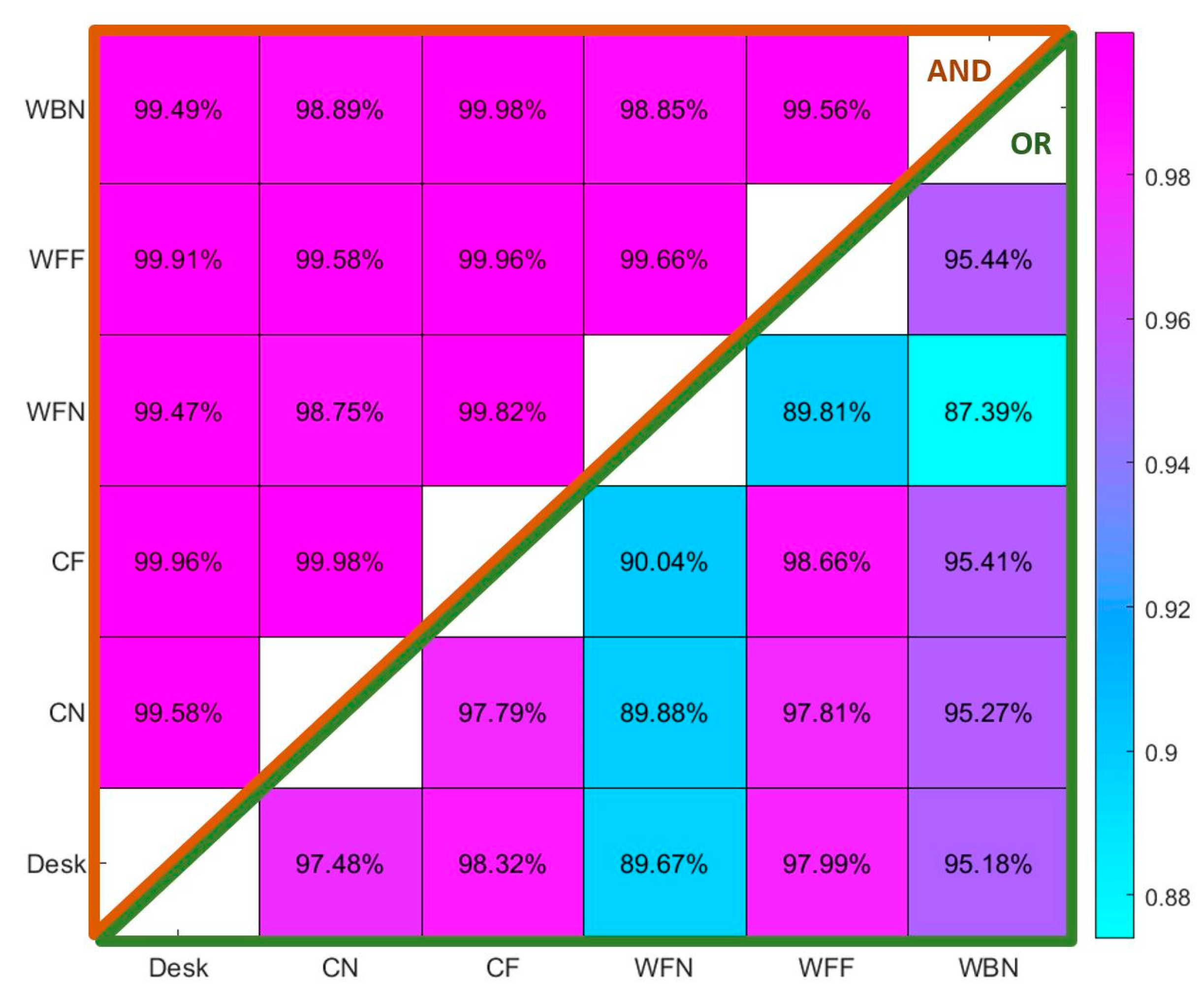
Figure 6 present the calculated overall accuracy of occupancy detection, presence detection, and absence detection, respectively, by various pairs of sensors. The choice between OR and AND fusion rules depends on improving overall accuracy and whether absence or presence detection is more important for the intended application.
Figure 4 shows that the overall accuracy for all possible pairs of sensors that are fused with the logical operator OR have higher accuracy than when fused with AND. Similarly, comparing the results of sensor-fused presence detection between the two fusion rules in
Figure 5 shows OR rule leads to a significantly higher presence detection accuracy compared to AND. For example, the fusion of Desk and CF sensors with AND rule results in 53% accuracy, while with OR rule, they can detect occupants with 91% accuracy. On the other hand, absence detection with AND rule provides higher accuracy as compared to OR when fusing the sensor pairs (
Figure 6). For example, using AND rule to fuse Desk and CF sensors leads to 99.96% accuracy, while OR rule slightly decreases the accuracy to 98.32%.
It is important to consider the tradeoffs between presence and absence detection by any detection system in different applications. For example, in demand-controlled HVAC systems, the AND rule may result in higher energy saving while OR rule provides better occupant comfort. However, the results show the differences in the resulted accuracies between the two fusion approaches are significantly lower for absence detection than for presence detection. However, the accuracy of absence detection is already in a relatively high range even by a single PIR (i.e., higher than 90%). The fusion of PIR sensor data for occupancy detection seems to be more appropriate when using OR instead of AND rule because of its positive effect on presence detection. Hence, the results and the following discussions on sensor fusion are focused on those related to OR rule. The strategy of using OR instead of AND imposes the priority to improve presence detection instead of absence detection. The slight decrease in accuracy of absence detection compared to the significant increase in accuracy of presence detection eventually results in an increase in overall accuracy.
The most accurate occupancy detection is performed by the fusion of Desk and CF sensors with an overall accuracy of 96.4% (
Figure 4). The detection accuracy by their fusion is higher than both Desk and CF sensors, which have overall accuracy of 94.6% and 88.9%, respectively (
Figure 3). The improvements are more significant for presence detection compared to absence detection. Presence detection by fusion of Desk and CF sensors is 91.2% accurate (
Figure 5), which is significantly higher than the accuracy of individual Desk and CF sensors with 83% and 60%, respectively (
Figure 3). The same combination of sensors results in the most accurate absence detection with 98.3% accuracy (
Figure 6), which is slightly lower than the accuracy of single Desk and CF sensors with 98.7% and 99.5%, respectively (
Figure 3). These two sensors can complement each other by compensating for their limitations on detecting some of the motions. The Desk sensor is better to detect the motions of a seated occupant’s lower body, while the CF sensor has a wider FOV to detect when the occupant is not seated or even the motions of a seated occupants’ upper body.
The lowest overall accuracy is achieved by the fusion of WFN and WBN with 87.9 % (
Figure 4). Such a result was expected as both of these sensors were positioned close to the window, which makes the sensors susceptible to false positive errors lowering the accuracy of absence detection to 87.4% (
Figure 6) as compared to 90.3% and 95.8% for individual WFN and WBN sensors, respectively (
Figure 3). Generally, the improvement in presence detection by sensor fusion is more significant compared to absence detection. WFF and CF sensors with individual presence detection accuracies of 51% and 61% (
Figure 3) have the lowest sensor-fused presence detection accuracies compared to other pairs with only 70.6% accuracy (
Figure 5). One reason could be that these two sensors are positioned farthest from the seated area and probably have similar limitations on detecting some of the occupants’ motions. This indicates the importance of positioning sensors at different distances from the detection targets when fusing data from multiple PIR sensors.
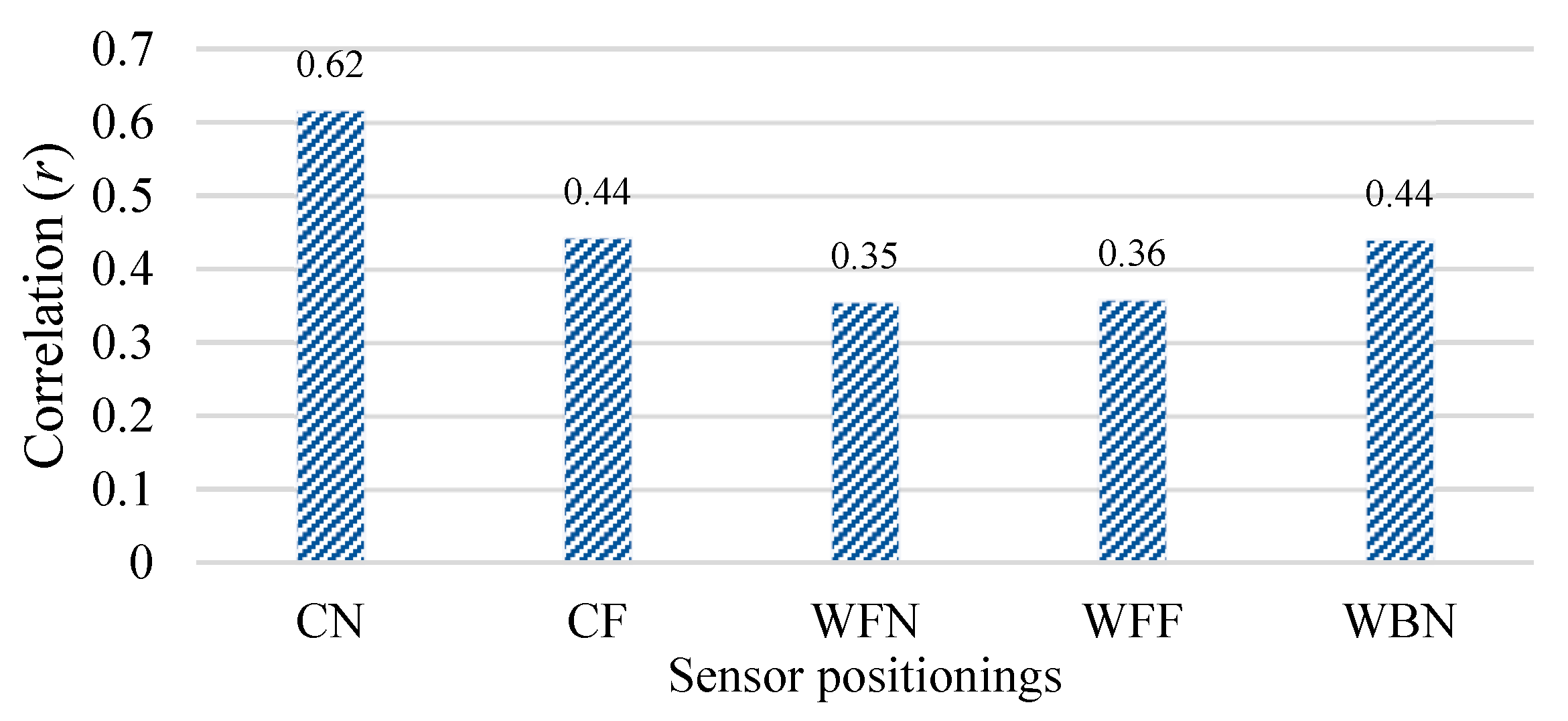
4.3. Occupancy Detection by CO2 Sensors in Various Positions
The analysis presented in this section compares the correlations between occupancy and CO
2 concentration measurements in different sensor positionings. The results cannot be directly used to infer occupancy but indicate which sensor positionings are more appropriate to be used for occupancy detection. As displayed in
Figure 7, CO
2 measurements by CN sensor have the highest correlation with occupancy since the changes in the measured values have higher correspondence with occupancy changes. This sensor provides the best representation of the occupants’ presence considering its high correlation with occupancy (
r = 0.61) compared to other sensor positions. This sensor is located just above the seated area, and thus is more influenced by CO
2 emitted from the occupants.
The proximity of the location of CN sensor to the seated occupant is probably an important factor for the high correlation with occupancy. However, WBN and WFN sensors have a significantly lower correlation with occupancy despite their close distance to the seated occupant. The reason could be that these two sensors are positioned at a lower height compared to the CN sensor, which might decrease their exposure to the CO
2 emitted by the occupant. On the other hand, the CF sensor has a lower correlation than CN sensor despite being located at a higher height, which is probably due to its higher distance to the seated occupant. The results show the two factors of distance and height from the occupant can affect the correlation of CO
2 concentration measurements with occupancy. However, due to the potential delays in sensor reaction to the changes of the CO
2 level [
30], a control system of HVAC system solely based on this sensor may have negative impacts on energy and comfort performance. Accordingly, CO
2 sensors, even when being positioned in the CN position, might be a better fit for fusion with a PIR sensor than being individually used for occupancy detection.
4.4. Effect of Sensor Positioning on Indoor Environmental Monitoring
Multi-sensor devices used in buildings often measure the parameters related to the indoor environment besides providing information about occupancy. This section presents the average hourly time series of environmental parameters measured in different positions and provides an overview of the effect of sensors’ positions on measuring various indoor environmental parameters. The analysis can provide recommendations on the choice of the positioning of these sensors by highlighting the tradeoffs between the reliability of various measurements when installing a multi-sensor device. On the other hand, the difference in the environmental measurements between some sensor positions may be insignificant, showing the flexibility of sensor positioning. Unlike the analysis of PIR data, which uses ground truth as a reference, the data related to indoor environmental measurements in this study do not have any ground truth data to compare the positioning of various sensors. Thus, the analyses corresponding to indoor environmental measurements are presented by average hourly time series.
4.4.1. Temperature
The temperature distribution in the indoor spaces may be uneven due to a variety of heat sources and heat sinks. Thus, the position of the sensor can affect temperature measurements with implications for the temperature setpoint to maintain the occupants’ thermal comfort.
Figure 8 presents the average hourly temperature measured by six sensors installed in the various positions in the three offices. For example, the average of temperature measurements between 23:00 and 24:00 during the two weeks of measurement is about 20 °C (the last point of the purple time series in
Figure 8). WBN is the sensor positioned nearest to the window, and thus is exposed to lower temperatures in heating seasons due to higher heat transfer through the window. The average temperature can drop as low as 19.5 °C. CN and WFN sensors were also positioned near the window; however, they are installed at different heights, which might be the reason for recording different temperatures. Temperature distribution inside the room is affected by the buoyancy effect, and thus the sensors installed in lower heights are likely to measure lower temperatures. However, there could be an aberration in this when the temperature sensors are affected by the heat sources and heat sinks such as a radiator and window. This effect can be observed for the Desk sensor, of which, despite being installed at a relatively lower height, its exposure to the nearby radiator increases the measured temperature. As the heating system was active during the measurement period, the temperature increase is specifically significant during working hours such that the radiator has a higher heat supply to adjust to temperature setpoint.
The ventilation in offices is supplied by the demand-controlled units based on the sensors (different from sensors in our study) installed on the ceiling in the middle of the office, where the CF sensor is positioned. This choice of position allows the sensors to be a built-in part of the ventilation duct and reduce costs. However, WFN and WBN sensors positioned relatively near the seated area are more likely to represent the occupants’ thermal comfort experience. There is a considerable difference in the temperature measured by these two sensors and that of the CF sensor. As shown in
Figure 8, the temperature measured by the CF sensor is higher than that measured by the other two sensors. The difference in the average temperatures between CF and the other two sensors can reach 2 °C and between 1 °C and 1.6 °C during non-working and working hours, respectively. WBN might be affected by the outside cold temperature since it is quite close to the window. The result suggests that a sensor installed at the CF position cannot measure a temperature that adequately reflects the occupant’s experience, while WFN may be a better choice due to its proximity to the seated area, lower height, and higher distance from the radiator and window.
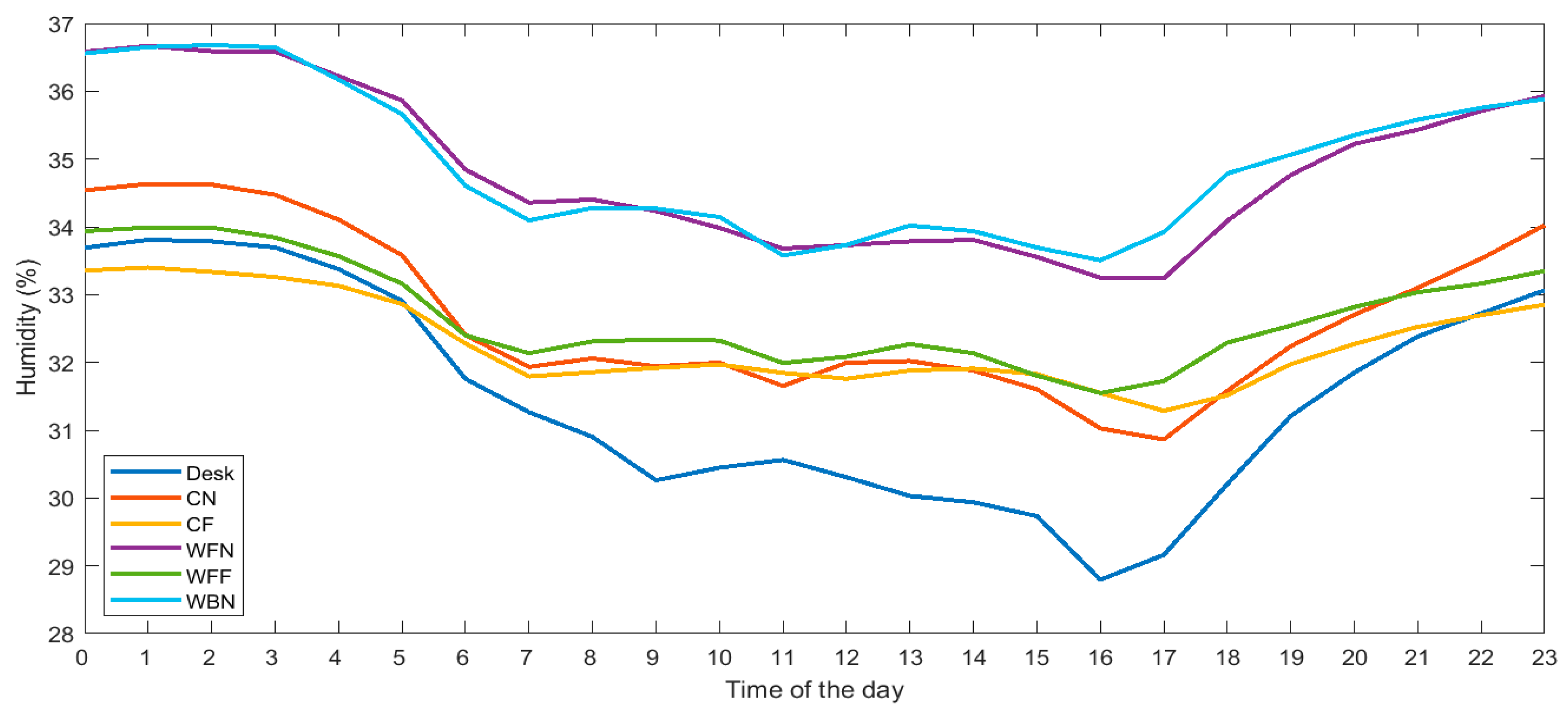
4.4.2. Relative Humidity (RH)
The average hourly RH measured by sensors positioned in different locations in the offices are presented in
Figure 9. The highest difference in the values reaches 4.5% between WBN and Desk at 16:00. However, comparing
Figure 8 and
Figure 9 reveals the differences in RH measured by sensors in different positions originate from an uneven temperature distribution in the offices. RH is partly related to temperature as higher temperature reduces RH despite absolute humidity being constant. In other words, the absolute humidity is rather homogenously distributed while RH varies due to temperature variations in different locations of the offices. This effect explains the differences in RH measurements by different sensors along with the variations of RH measured by each sensor. As thermal comfort is not as sensitive to small variations in RH, the slight differences between the sensors’ measurements are unlikely to have implications for thermal comfort in the offices. Thus, the position of the humidity sensor might be relatively unimportant in an office unless it is near a humidity source such as a humidifier. For example, the changes in RH measurements by the CN sensor placed near the occupant are similar to the other sensors, which have a higher distance to the occupant. Thus, the occupants probably have a negligible effect on changing RH.
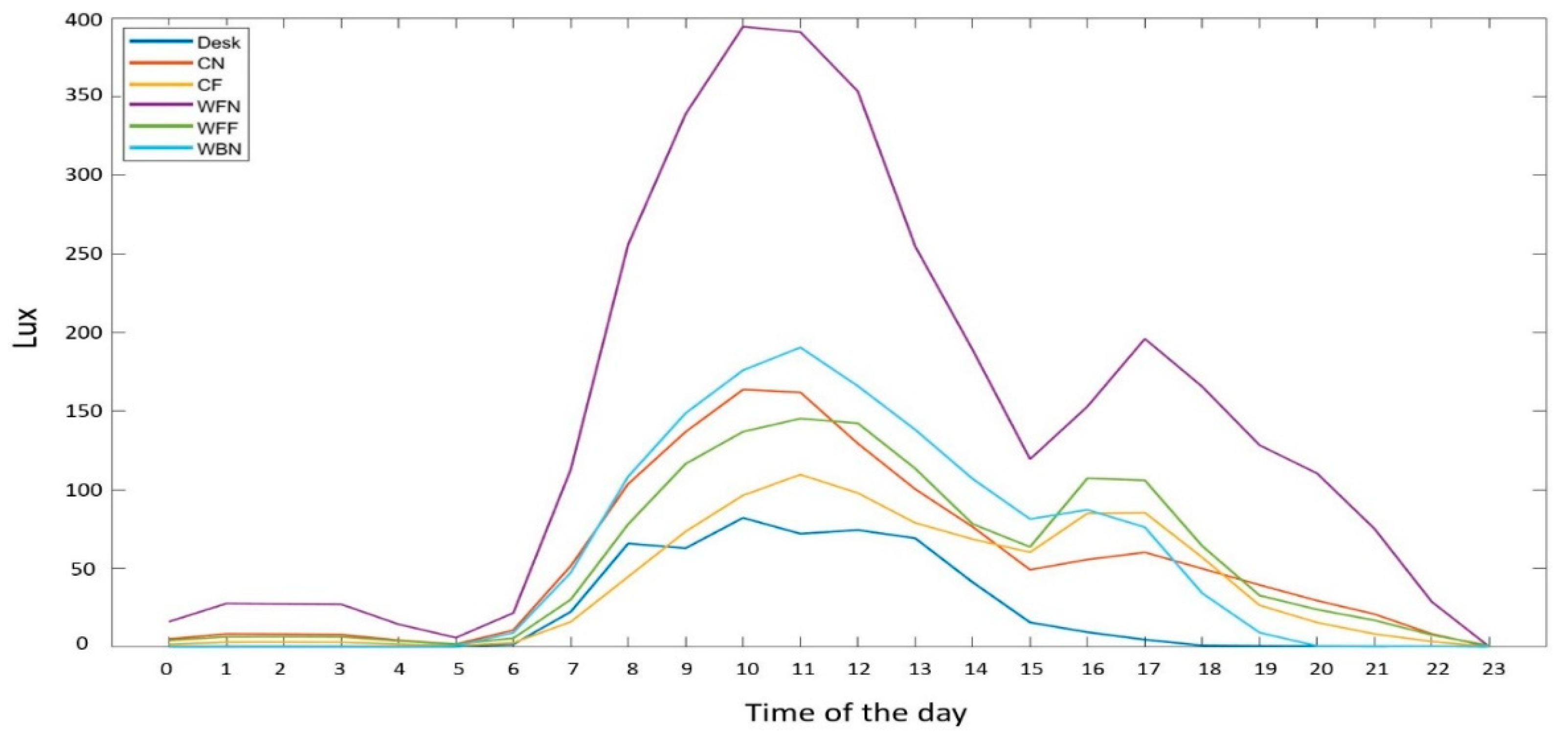
4.4.3. Illuminance
The average hourly illuminance (light level) measured by sensors in different positions in the offices are presented in
Figure 10. In this case study, the sensors face different directions and none of them are positioned to present the work plane illuminance. Thus, it is not possible to evaluate the visual comfort in the offices. The aim of the analysis is to realize how significant is the data variation measured by illuminance sensors to suggest the adequate position of a multi-sensor device. The intensity of illuminance depends on the location of an observer (or sensor) into space and the relative position with respect to both natural (e.g., windows) and artificial (luminaires) light sources [
3]. The light sensors cannot distinguish between different light sources.
As shown in
Figure 10, the average illuminance measured by WFN sensor, which faces a window from a close distance, is significantly higher than the other sensors. It may be due to the direct sunlight during days and street light during nights. On the other hand, the Desk sensor that faces downwards under the desk is exposed to lower levels of light compared to the rest of sensors. Moreover, the illuminance measured by this sensor is highly affected by the occupants’ presence due the occupants’ shadow. Even without considering these two outlier sensors, the results show significant differences between the data measured by various sensors. For example, the average illuminance between 11:00 and 12:00 is 115 lux for the CF sensor while the measurements are 65% higher for the WBN sensor with 190 lux. Accordingly, measuring illuminance is very sensitive to sensor positioning, and small changes may cause significant variations in the measured data. This suggests that the light sensor may not be a good match to be integrated in a multi-sensor device if the purpose is to evaluate the visual comfort of the occupants.
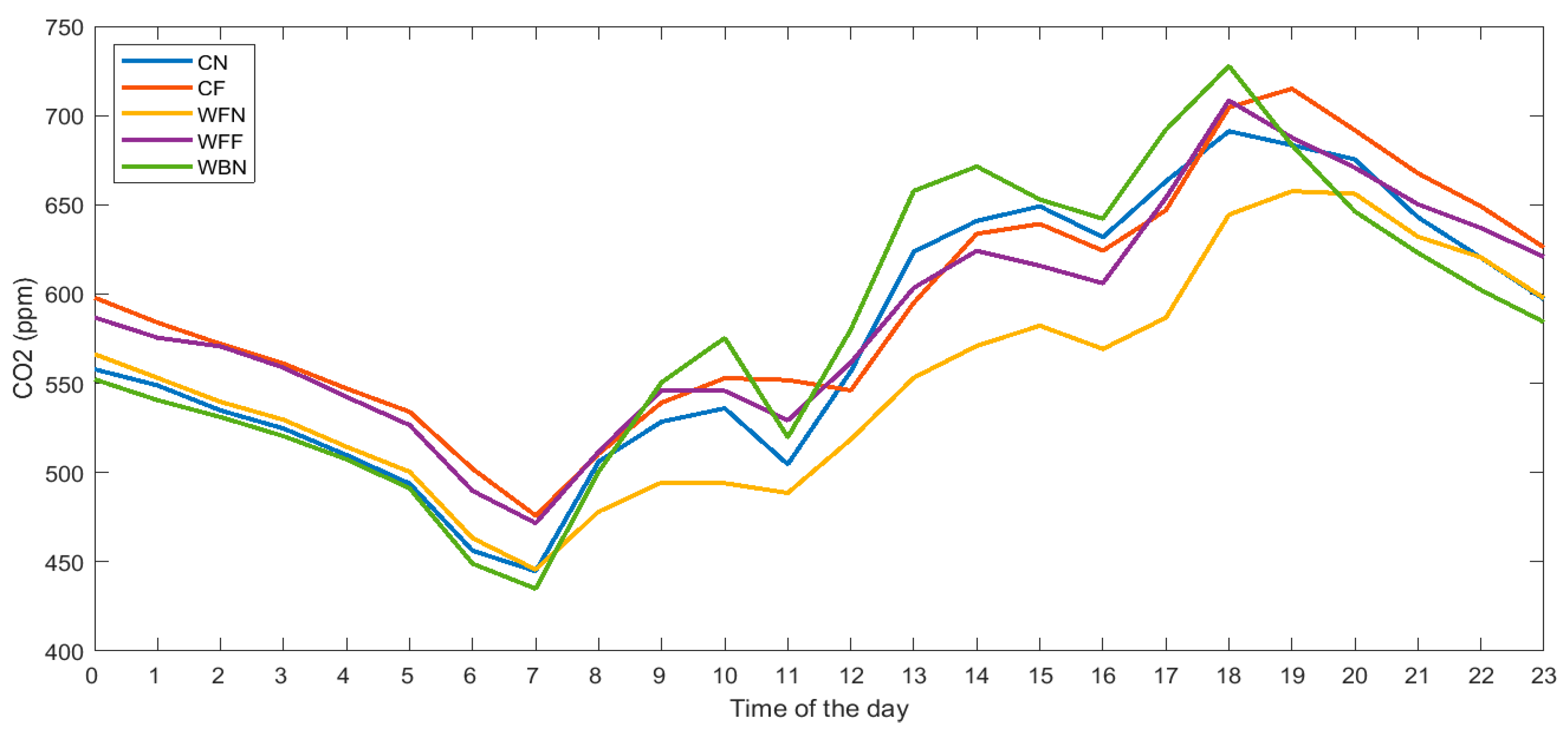
4.4.4. CO2 Concentration
This analysis investigates the implication of sensor positioning on the measurement of CO
2 concentration in a single-occupant office.
Figure 11 depicts the average hourly CO
2 concentration measured by various multi-sensor devices except for the Desk position since it did not have a CO
2 sensor. All the sensors show similar variations for CO
2 concentration in the offices. CO
2 concentration starts to rise around 07:30 when the occupants arrive at the offices and gradually decreases after 18:00 when they leave their offices. The WBN sensor shows slightly higher variations during working hours as the sensor is positioned near the occupant. On the other hand, the WFN sensor shows relatively smaller changes in working hours, despite being near the occupant, indicating its location might receive a higher ventilation rate or air infiltration from the window that compensates the occupant’s respiration. The CN sensor is positioned right above the occupants and can be potentially affected by the occupants’ respiration. However, unlike the initial expectation, this sensor shows an almost similar measurement pattern to other sensors. Overall, the differences among measurements of CO
2 concentration in different positions seem to be negligible; thus, positioning does not have a significant implication for monitoring the indoor air quality unless being directly exposed to the airflow of the ventilation system (e.g., WFN position).
5. Conclusions
This study provides qualitative and quantitative descriptions of the effect of sensor positioning on occupancy and environmental monitoring by multi-sensor devices. The results enable practitioners to evaluate the possible positionings of multi-sensor devices and allow researchers to overview the performance of such devices when being used in various building applications. Further, this study provides a method to obtain information on the accuracy and reliability of sensing systems, which enables conducting sensitivity analysis of the results of the studies investigating the applications of sensor data. The study design allows understanding of the tradeoffs between various positions of multi-sensor devices used for occupancy and environmental monitoring. Many studies have previously investigated the suitability of different sensor technologies for occupancy detection and indoor environmental monitoring in buildings. This study presents a new outlook for studies on sensors by demonstrating that, apart from sensor technologies, the way the sensors are used, such as their positioning, can significantly affect their applicability and effectivity.
The results show the significant effect of the position of PIR and CO2 sensors on their occupancy detection performance. Sensor positioning can also affect indoor environmental monitoring, especially when measuring temperature and illuminance. The results suggest describing the performance of PIR sensors by only a number as coverage distance is deficient. Sensor developers should test their sensors under standardized conditions to provide comparable information on their sensors’ accuracy in different distances. It is more challenging for PIR sensors to detect presence as compared to absence. Absence detection can be mainly impaired by sunlight when the sensor faces the windows from a short distance. The distance of PIR sensors to occupants affects presence detection besides PIR sensor’s sensitivity to other factors such as exposure to windows. In our case study, the accuracy of presence detection dropped by 13% for every 1 m of further distance. The fusion of multiple PIR sensors is shown to improve the accuracy of occupancy detection. However, achieving a significant improvement by sensor fusion requires careful sensor positioning by considering the positions with diverse distances and orientations to the detection target.
The choice of the positioning of PIR sensors should be made to expose them to the highest levels of occupants’ motions by considering the potential occupants’ activities. For example, as in a typical office, the occupants are likely to perform their tasks seated. Positioning PIR sensors under the desk results in the most accurate occupancy information. The fusion of a PIR sensor positioned under the desk with another sensor that has a wide FOV on the entire space can lead to a significantly enhanced occupancy detection. However, that position may not be appropriate for other environmental sensors in a multi-sensor device such as temperature. In this case, using multi-sensor devices may prevent the optimum choice of positioning. However, by knowing the potential adversity of measurements for some sensors, it is still acceptable to position multi-sensor devices availing from the positions best suited for measuring the main intended parameter.
The study design allows the relative comparison of sensor positionings; however, the results of the individual sensors have limited generalizability. For example, the values of accuracy of PIR sensors in our case study cannot be generalized to other PIR sensors even with similar positionings. Besides sensor positioning, accuracy of occupancy detection depends on sensor’s build quality and setups, and occupant’s activity in different spaces. Thus, PIR sensors’ low accuracy in some positionings in our study does not undermine the results of other studies that used occupancy information from PIR sensors. The results related to the positioning of indoor environmental sensors should be used cautiously regarding the office equipment and amenities especially when measuring temperature due to its high sensitivity.
Future studies should provide multi-dimensional optimization models taking various factors associated with the geospatial positioning of sensors into account. The results of indoor environmental measurements are related to the average data collected during a two-week-period, which may not be representative of the monitoring downfalls in specific conditions. Further investigations may consider the effect of certain events on sensor measurements, such as when there are visitors in the offices. The investigations could be further expanded by considering other types of spaces such as open-plan offices or classrooms where occupants might conduct different types of activities. Moreover, the sensors for occupancy and indoor environmental monitoring are not limited to those investigated in this study and various sensor technologies need to be assessed with regard to their positionings.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}