1. Introduction
Distribution networks, which are responsible for delivering electricity to consumers, are essential parts of the electrical logistics chain. A resilient and stable distribution network should transfer electrical energy to local light manufacturers, residential and commercial customers with minor fluctuation and interruption [
1]. However, unwanted events such as equipment malfunction, unauthorized involvements (e.g., human disruptions), and extreme weather conditions may lead the system to experience a fault and, as a result, a shutdown. Hence, various faults with diverse resistances and situations may happen in the distribution networks at numerous locations [
2]. Line characteristics can change over time and under different fault conditions, adversely affect fault location procedures and result in erroneous results. On the other hand, financial losses and consumer discontent will ensue if network recovery takes a substantial amount of time owing to incorrect fault location results. Therefore, it is crucial to detect faults promptly and correctly, regardless of their severity and line parameter variation [
3]. There is a wide variety of fault location methodologies, each with its own set of advantages. The most well-known fault location strategies include Machine Learning (ML) techniques [
4], impedance-based methods [
5], traveling wave-based algorithms [
6], and state estimation-based approaches [
7]. The authors of Ref. [
8] provide a comprehensive review of the various types of fault location methods and their associated benefits and drawbacks.
In impedance-based methods, low-resolution recorded data at the network’s substation are employed to locate fault points [
9]. The primary drawback of impedance-based strategies is that they cannot recognize the actual faulty section, requiring an additional technique to distinguish the actual fault spot from the other candidates [
10]. The authors of Ref. [
11] represent a fault location approach for locating the fault spot in a smart distribution network. To improve accuracy, the distributed line model is used. However, the line parameters vary in real-world applications, owing to age and weather conditions. One of the main limitations of this approach is that it requires exact line parameters to perform correctly and accurately. A further disadvantage of impedance-based fault location techniques is that they require the precise load value of each node to function efficiently, which can be alleviated by deploying smart meters in all nodes. In [
12], the collected fault data of smart meters and Smart Feeder Meters (SFMs) have been used to pinpoint the specific spot of the fault in a multi-branch distributed network. To cover complete sections of the network, SFMs must be installed in all branches. An impedance-based approach is utilized to discover probable fault spots, and, then, the genuine faulty section is identified using the active power recorded by the SFM. One unpleasant aspect of this approach is that it is reliant on the fault current. In vast distribution networks, this technique is unable to distinguish high impedance fault points accurately. The authors of Ref. [
13] resolve the multi-response issue associated with impedance-based techniques by using the frequency component analysis methodology. An innovative impedance-based prevention technique for active distribution networks operating both in islanded and grid-connected modes is suggested in [
14]. The recorded data of protection relays and the measurements, which are located at the end of each line, have been used in this methodology. A fault identification index is then defined as a function of a pre-determined constant value and the fault’s equivalent impedance. If the index is larger than the predetermined constant value, the protection functions of relays are executed. The key concern of this technique would be that it lacks a mechanism for locating faulty sections and is susceptible to load uncertainties due to the use of a constant comparative factor in the construction of the fault detection index. To locate the location of the fault in distribution networks, Ref. [
15] proposes a novel impedance-based fault localization approach. The modal transformation matrix is employed in this method to mitigate the inherent influence of line parameters on each phase, which creates a dependency in phase formulation. The voltage and current of fault data recorded by the one-end feeding substation are utilized to locate the fault. Although this method is immune to load variation, different fault resistances, time-varying loads, and an unbalanced network operation, it requires precise line parameters for proper functionality. It may acquire multiple fault point nominates utilizing an extra method to specify the real faulty point.
Traveling wave techniques are among the most widely used methods for locating fault points independent of line characteristics [
16]. The authors of Ref. [
17] present a robust traveling wave-based fault location approach for determining the location of the fault in multi-branch networks. The majority of traveling wave-based techniques include arrival time inaccuracies, which might imperil the entire fault location operation. In this paper, a novel optimization-based technique for mitigating the negative impact of arrival time inaccuracy is given. The particle swarm optimization approach is implemented to reduce the run time and improve precision. The primary drawback of this approach is that it necessitates high sampling rate devices, which are not cost-effective for distribution networks. The authors of [
18] offer a new fault locating approach that uses a deviating decomposition mode and an energy analysis of the recorded fault signal to locate the fault spot. Before developing a fault, an intrinsic range variation matrix is generated based on the traveling wave propagation characteristics and the distribution system structure. The fault distance difference matrix is built utilizing all double-ended measurements of the network arrival time of the traveling wave of all records. Finally, the fault distance can be calculated by comparing the two previously described matrices. This technique is not resistant to fault signal arrival time error. Traditional traveling wave fault location approaches only examine time or frequency characteristics, resulting in an incorrect response. The authors of Ref. [
19] propose a novel traveling wave time–frequency approach that overcomes the shortcomings of existing methods. First, the arrival time of signals to nodes is identified using a quadratic B-spline wavelet analysis modulus maximum detection technique with a denoising factor. The appropriate velocity of the incident wave is then calculated employing the matrix pencil technique, as well as the frequency of the traveling wave when it arrives at the nodes. Finally, the fault location can be calculated using pre-determined equations and the obtained data of the fault signal.
On active distribution networks with adequate data, state estimation-based fault location methods are primarily employed. In [
20], a new state estimation-based fault location approach for active distribution networks is proposed. This work consists of two steps: identifying and locating the fault. First of all, a framework is constructed to distinguish network faults by utilizing the network’s line characteristics, the Jacobian matrix of each section, and the state estimation paradigm. If the output of the least-squares-error-based function is more significant than a pre-determined residual, the problem can be recognized. Then, as a floating node, a new node is defined. Finally, several iterative computations are used to identify the location of the floating point, which is the fault spot. The authors of [
21] introduce a new state estimation-based scheme for locating a short circuit fault in active distribution networks. The classic state estimate technique is changed in this aspect to be consistent with fault situations. Then, based on the updated state estimation, a fault localization method is provided, which tends to detect the fault’s location after distinguishing the faulty region. Current and voltage data recorded by measurements, as well as pre-fault condition estimate findings, are employed for this purpose, and the proper location of the fault is identified utilizing computed residual measurement indices. The main weakness of the method is that it only applies to short circuit faults. Because of the existence of various branches in the power distribution network, the availability of only voltage and current data at the start of the line, and a lack of access to information at the end of the network line, detecting the faulted segment in the distribution system has become much more imperative. Two approaches were employed in [
22] to identify the network’s faulty section and fault position. At the beginning of the line, the fault distance can be determined by calculating the current at the end of each network line. As a result, in this work, it was attempted to practically approximate the current and voltage at the start and end of each distribution system line by placing smart meters in the network’s main branch and also using information derived from the power flow in the network’s standard operation. More power flow is utilized in this approach to compute the voltage drop of the lines and calculate the current and voltage at the network lines’ ends, allowing the faulty section to be located.
Because of their versatility and performance, Machine Learning (ML) algorithms are among the most promising approaches for locating faults in distribution networks [
23]. Today, thanks to the development of ML and neural network techniques and their variety of applications, acceptable results have been obtained in predicting and classifying most power system [
24] issues such as event classification and location [
25], fault detection [
26], security assessment [
27], state estimation [
28], and load forecasting [
29]. Building a proper database for training artificial intelligence algorithms is very crucial. The authors of Ref. [
30] present an integrated system for fault classification and localization employing a summation wavelet extreme learning machine. This technique functions by incorporating feature extraction into the learning process. The significant advantage of this technique is that no line parameters are required. The type of fault is identified in the first phase of the method, followed by the location. Because of their varying current levels, distributed generations (DGs) may have an unfavorable effect on the fault location method. In a faulty circumstance, distributed generations respond differently depending on their power levels at the fault time. To address this issue, the authors of [
31] propose a new deep learning (DL)-based approach for locating faults in distribution networks equipped with distributed generation. For the learning phase, a standard neural network is being explored. The fault identification step is carried out with raw data of a three-phase voltage and current for both faulty and non-faulty data classes. The performance of the approach is investigated in a variety of fault scenarios. This method’s cross-validation accuracy is 99.52% for all sorts of faults. The primary drawback of this approach is that it is incapable of detecting the faulty section.
In this study, a highly accurate method, independent of the distribution network topology and without the demand for line parameters, is developed employing a DL model for detecting faulty sections in real time. Furthermore, the proposed Gated Recurrent Unit (GRU) model requires only two samples of the angle between the voltage and current on either side of the feeders. Employing the GRU model, feature extraction is conducted hierarchically by the model itself and does not require feature engineering. Regardless of the type of fault occurring in the network, such as a three-phase to ground, two-phase to ground, two-phase, and single-phase to ground fault, the proposed framework can determine the faulty section with highly competitive accuracy. The model’s performance has been validated in various error conditions on the IEEE-33 bus system. The salient contributions of this research are itemized as follows.
A non-iterative and parameter-free model is introduced to detect faulty sections in distribution networks in real time that uses only the angle between the voltage and current on both sides of the feeder.
The proposed GRU model can recognize the faulty section for various fault types and does not demand fault type information.
This approach takes advantage of SFMs’ recorded low-resolution data (a sample in each period) compared to its competitors.
The model’s performance has been validated on the IEEE-33 bus system, and the results confirm excellent accuracy.
The rest of the paper is structured as follows. In the next Section, the proposed methodology to detect faulty sections is presented in four subsections.
Section 3 demonstrates the case study and simulation and the performance evaluation of the model. Finally, the conclusion is reached in
Section 4.
2. The Proposed Faulted Section Location Methodology
2.1. Database
Disturbances and faults in power grids cause immediate and fast changes in voltages, currents, and angles throughout the system; these changes are usually more pronounced and have higher amplitude fluctuations near the fault location. However, due to the highly nonlinear nature of power networks, especially distribution networks, caused by abundant power electronics equipment and renewable energy sources, short line lengths, and similar fluctuations in voltage and current quantities of lines during faults, the performance of model-based techniques to identify the fault location has almost been associated with various difficulties and challenges, so that many model-based methods are not able to recognize the faulty line with high accuracy. In contrast, data-driven techniques are not dependent on network structure.
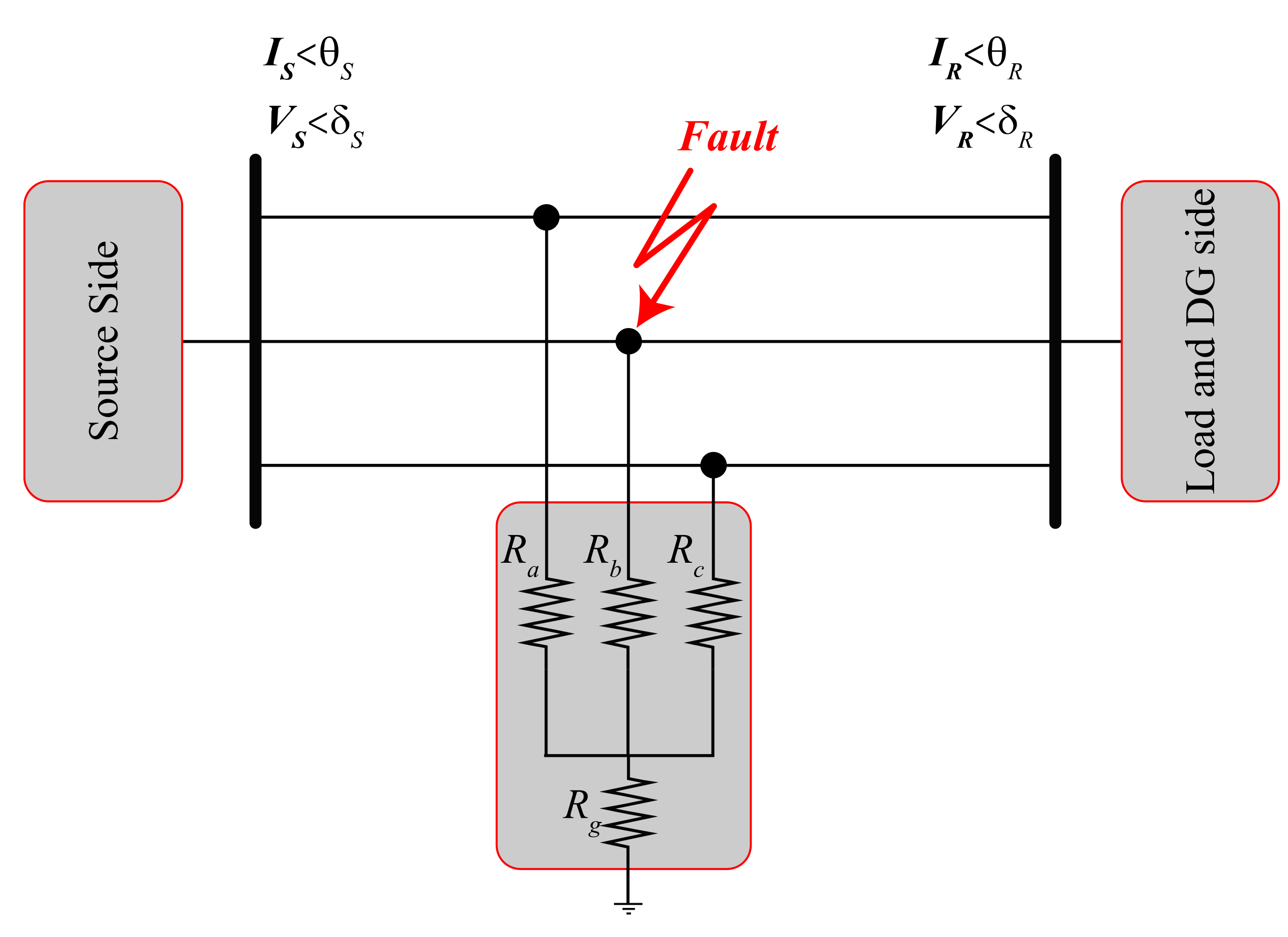
One of the variables affected after a fault in distribution networks is the angle between voltage and current on both sides of the fault section. The proposed method employs the angle between voltage and current on both sides of each section to distinguish the fault section in distribution networks. In
Figure 1, a 3-phase to the ground fault occurred in the distribution line. When a fault occurs in the distribution network, the relays detect it and trigger the trip signal. Instantly, angles between the voltage and current of all three phases on both sides of the section were collected. Angles were sampled from SFMs with a sampling frequency of 50 Hz, which the data window included a pre-fault and a post-fault sample. Finally, applying Equation (4), the difference of the angle between the voltage and current on both sides of the section was calculated and used as the input variable to the proposed GRU model. How to achieve this variable is represented in Equations (1)–(4).
where
,
,
, and
are voltages of the sender and receiver busbars and their angles, respectively.
,
,
, and
are also the currents of the sides of the section and their angles, respectively. a, b, and c also represent phases A, B, and C.
where
and
are the angles between voltage and current on both sides of the section, respectively, and
is the section
variable used for the proposed section detection framework. Since the data window contains two samples, the
value was calculated for the pre-fault and post-fault samples separately, so, for each section, the
matrix contains six elements. Eventually, to determine the exact section where the fault occurred, the
values must be calculated for all sections (Equation (4)). For example, for the IEEE-33 bus system, which has 32 sections, the
β matrix will have dimensions of
. Accordingly, when a fault occurs in the network, a matrix with dimensions
will be formed, where n is the number of sections in the network. This matrix is then given as input to the pre-trained GRU model to determine where the fault occurred. The more severe the fault and the more phases involved, the easier it will be to find the faulty section in this algorithm; because the difference in angles in Equation (3) for the faulty line will be accompanied by more variations, it will help the DL model to find that section more easily.
2.2. Recurrent Neural Networks
As one of the most advanced and state-of-the-art ML algorithms, DL has improved the performance of data-driven methods by producing a big hypothesis space. Recurrent Neural Network (RNN) is one of the robust DL algorithms widely utilized to deal with sequences such as time series. The RNN model employs previous information in the sequence to generate the current output using the memory embedded in it, distinguishing RNN from other data-driven approaches.
By increasing the number of hidden layers in a DL model, the model can distinguish more complex functions. The back-propagation algorithm was employed in DL to fine-tune network weights and parameters. In the back-propagation algorithm, for a model with n hidden layers, n derivatives were multiplied by each other. Now, if these derivatives were large, the gradients increased exponentially to the point that they caused an explosion and the model weights tend to be infinite or NAN. In contrast, if the derivatives were small, the gradient decreased exponentially to the point that the gradient disappeared or became zero in deep networks. Vanishing gradient and exploding gradient issues in the back-propagation algorithm can afford slow convergence and significant and undesirable changes in the values of weights, respectively.
RNN method usually encounters vanishing gradient and exploding gradient issues in the back-propagation algorithm. Hence, Long Short-Term Memory (LSTM) and GRU methods, which are subsets of RNN, were developed to address these problems. These two algorithms use internal mechanisms called gates to regulate the flow of information in the network. Gates learn the essential inputs of the sequence and store them in a memory unit. Consequently, they are able to convey information well in long sequences and increase the accuracy of prediction and classification.
2.2.1. LSTM Model
Cell state is the core concept behind the LSTM, also known as the long-term memory unit. The cell state (
) updates in every step of the sequence according to input
to create a temporal feature vector
. LSTM regulates the flow of information through three gates called forget gate (
), input gate (
), and output gate (
). Forget gate decides what information should be removed or kept. Forget gate value is a number between 0 and 1; if this value is closer to 0, it means forgetting, and if it is closer to 1, it means keeping information. The sigmoid activation function (
) does this. The input gate determines new information additions from the current time step and then updated the cell state by
. Eventually, the output gate specifies the extent of the previous step information carried over to the subsequent step, including the current time step information. The LSTM equations were as follows:
where
and
are weights and biases values of the LSTM in every gate. The LSTM structure is presented in
Figure 2.
2.2.2. GRU Model
GRU is a simpler type of LSTM consisting of only two gates, Update and Reset, which reduce the number of parameters of the model compared to LSTM. Dissimilar to LSTM, which employs the cell state to store and transfer information, GRU utilizes the hidden state (
). The update gate (
) has a similar function to both forget and input gates in the LSTM model. Additionally, the reset gate (
) determines how much past information is not required in the current step and should be forgotten. The GRU model was defined by Equations (11)–(14) [
32].
where
and
are weights and biases values of the GRU. The GRU structure is shown in
Figure 3.
Due to the comparable performance of GRU and LSTM, employing both models will usually have the same outcomes. However, because the GRU has fewer parameters and is more straightforward to implement than the LSTM, it is faster to train and performs better on small amounts of training data and a lesser data size is required to capture the properties of the data. Consequently, in this study, the same method was utilized to develop the proposed algorithm for determining faulty lines in distribution networks.
2.3. Layers
In the proposed DL model structure, besides the GRU layers, there are other successive layers. These layers comprise the drop-out layer, batch normalization (BN) layer, flatten, dense layer, and softmax layer, which together can develop a DL network. Dense and softmax layers are usually utilized at the end of a structure for classification. Each of these layers is described below:
Drop-out layer: DL networks utilize regularization strategies to avoid overfitting and alleviate the gradient vanishing problem. The most popular and influential of which are dropout [
33] and BN [
34]. The dropout, which is only applied throughout training, randomly excludes some neurons with
probability, which reduces the overfitting issue.
BN layer: In a DL model, since the parameters of each layer change while training, it changes the distribution of input data to the subsequent layers, which reduces the speed of model training. To tackle this issue, BN was introduced, which is a way of accelerating training. This state-of-the-art strategy normalizes each layer’s input data with a mean of 0 and a variance of 1 [
34].
Flatten layer: Flatten layer was proposed to reshape the input tensor into a shape (batch dimension, features). For instance, if the layer has an input with dimensions (batch dimension,3,3), by applying the flatten layer, it transforms the tensor to dimensions (batch dimension,9). This layer was utilized before the dense layer.
Dense layer: In a dense layer, all the input neurons are connected to every output by weights. This means that each output is the result of function on all input neurons. This layer is also known as the fully connected layer.
Softmax layer: The softmax mathematical function transforms the input vector to the probability vector. This probability vector estimates the probability that the data relates to a specific class. Thus, softmax has the equivalent function as the sigmoid function; moreover, the sum of all classes’ probabilities are 1. Equation (15) shows the softmax function, where
is the input vector to the layer with length
[
35].
2.4. Architecture of the Proposed GRU Model
The structure of the proposed GRU model to recognize faulty lines is demonstrated in
Figure 4. The proposed model was able to identify faulty sections for various faults, including three-phase to ground fault, two-phase to ground fault, two-phase, and single-phase fault. Four GRU layers were employed in the model, and, following each layer, two regularization strategies (dropout and BN) were used to prevent overfitting. The dropout value for all layers was set to 0.1. The simulation data in DIgSILENT PowerFactory software were applied in various scenarios of faults to create the database. The number of outputs of the softmax layer was equal to the number of classes or, more precisely, the number of sections in the network. For illustration, for the IEEE-33 bus system, there were 32 sections, and the model had to ultimately estimate which section the fault occurred in.
To tune the models’ parameter and hyperparameters values, an Adam optimizer with learning rate, weight decay, and momentum as 0.001, , and 0.9, respectively, was employed to catch the best and most accurate results. Additionally, the sparse_categorical_crossentropy loss function was chosen in this study.
The free parameter proposed model evaluated and detected fault sections in real time. The framework of the proposed method is demonstrated in
Figure 5. When a fault occurred in the distribution network, the protection relays issued a trip command and triggered the proposed GRU model. Voltage and current angles were then measured and collected from all SFMs installed on either side of all sections. Each time series of voltage and current angles consisted of two samples, a pre-fault, and a post-fault sample. For all SFMs, the angle between the voltage and current of both samples was calculated. Considering two SFMs were embedded per section, the vector introduced in Equation (3) could be formed. Ultimately, for all sections, the vector was constructed to achieve matrix Equation (4). The matrix was given as input to the pre-trained GRU model to estimate the faulty section.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}