1. Introduction
Global warming and rising sea levels have made the search for renewable energy more urgent [
1]. Europe is rich in wind energy, among several common renewable energy sources; it has been a good renewable energy source and is now one of the fastest growing renewable energy sources in the world [
2,
3]. Offshore wind turbines can be divided into two categories: offshore horizontal axis wind turbine (HAWT) and offshore vertical axis wind turbine (VAWT). Due to the high efficiency of the wind energy of horizontal axis offshore wind turbine, most large-scale wind power generation is now based on the horizontal axis [
4,
5,
6]. Due to the high utilization rate of wind energy and mature technology of large-scale horizontal axis offshore wind turbines, large-scale wind power generation is now mostly horizontal axis, which occupies a large share in both offshore wind power and onshore wind power [
7,
8]. While the larger size of the offshore wind turbine helps reduce the cost of generating electricity, it also significantly increases the cost of operation and maintenance, especially for offshore wind turbines that require installation and maintenance on specific vessels [
9,
10]. With the increase of the size of offshore wind turbines, the cost of power generation is reduced, which also brings difficulties to the construction and maintenance of large-scale offshore wind turbines [
11]. On the contrary, since the generator and gearbox system of the vertical axis offshore wind turbine is installed on the base, the theoretical limit of the top rotor can reach 30MW, so increasing the size of the vertical axis offshore wind turbine does not bring many negative effects [
12]. As we can see from
Figure 1, the offshore floating vertical axis offshore wind turbines are running on the surface of the deep ocean.
The improvement of blade structure has always been an important direction of offshore wind turbine research. By changing the blade shape, the vertical axis offshore wind turbine can adapt to different working conditions and improve the torque performance and wind energy capture rate of offshore wind turbine. The experimental design and CFD simulation were carried out on the vertical axis offshore wind turbine. The optimization variable of small wings can be reduced by keeping the pressure difference on both sides of the blade tip vortex, which can improve the power factor. The power output and the improvement of the wings on the vertical axis offshore wind turbine mainly be changed in the direction of the offshore wind [
14]. Sobhani E. et al. established a cavity on the blade of VAWT and changed the flow field around the blade. The results showed that the circular fin with a diameter of 8% chord length was the best near the pressure side and leading edge of the airfoil [
10]. Compared with the reference airfoil, the wind energy capture rate of the wind generator with a cavity was improved by 18% at
. Mohamed O.S. et al. studied the startup performance of a vertical axis offshore wind turbine with slotted airfoil blades and optimized the slotted position, inclination, and size. The results showed that at large angles of attack, the torque and power coefficient at low tip speed ratio could be improved by delayed eddy current separation [
15].
Zamani M. et al. proposed a J-shaped blade with trailing edge opening on the lower surface of the blade, indicating that the J-shaped blade can optimize the performance of the wind generator, eliminate the pressure surface at the maximum thickness of the trailing edge of the airfoil, and improve the self-starting ability of the wind generator [
16]. In addition, J-shaped blades with openings on the upper surface are proposed to generate both lift and drag forces. This combined force helps the turbine to operate faster at low wind speeds, especially at low tip speed ratio, which improves self-starting and wind energy capture [
17]. M.H. Mohamed et al. analyzed three types of offshore wind turbines with different airfoil sections, and compared the performance and noise of J-blade offshore wind turbines [
18].
The above study is feasible for ascension offshore wind turbine blade structure to improve performance. The 2-D simulation of the offshore wind turbine J-shape blade did not consider the performance of the low wind speed. At the same time, surface changes of offshore wind turbine J-shape blade have some shortcomings on performance impact. Thus, in this study, the J-shape blade structure has been improved. Therefore, in this study, when the azimuth angle of J-shaped blade is between 60° and 180°, the torque is improved through resistance, and the influence of the change of the upper surface on the performance of the wind generator is analyzed. By analyzing the change curve of instantaneous blade torque, it is found that when the blade tip speed ratio is low, the azimuth angle between 60° and 180° will produce negative torque. The results show that both the torque and the wind energy capture rate increase when the blade tip speed ratio is low. Then, the flow field of the J-shaped blade is analyzed, and it is found that the resistance of the lower surface of the blade is larger when the azimuth angle is between 60° and 90°. Compared with the symmetrical airfoil offshore wind turbine, both the torque and the wind energy capture rate are improved at low tip speed ratio. When the wind speed is 9 m/s and TSR = 1, the average torque of the wind generator is 64.05. Based on the above studies, they mainly focus on the influence of characteristic parameters on the wind energy capture rate. There are many studies on the starting torque and wind energy capture rate of the hybrid vertical axis offshore wind turbine of Savonius and Darrieus; thus, it is difficult to install the hybrid vertical axis offshore wind turbine, and Savonius will reduce the wind energy capture rate when the blade tip ratio is high. The proposed J-blade and the optimized J-blade are based on the NACA0018 blade to adopt a single vertical axis offshore wind turbine and to improve the self-starting capacity such that a good wind energy capture rate can be obtained at a low tip speed ratio.
The rest of this study is outlined as follows. First, in
Section 2, we introduce the parameters of the design of vertical axis offshore wind turbines. In
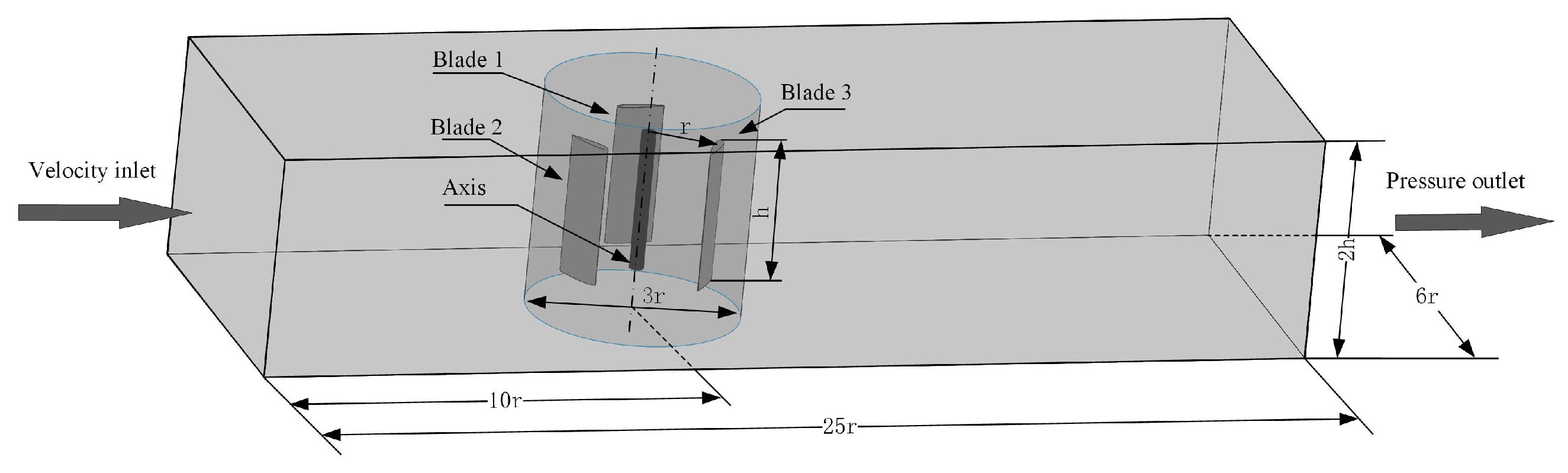
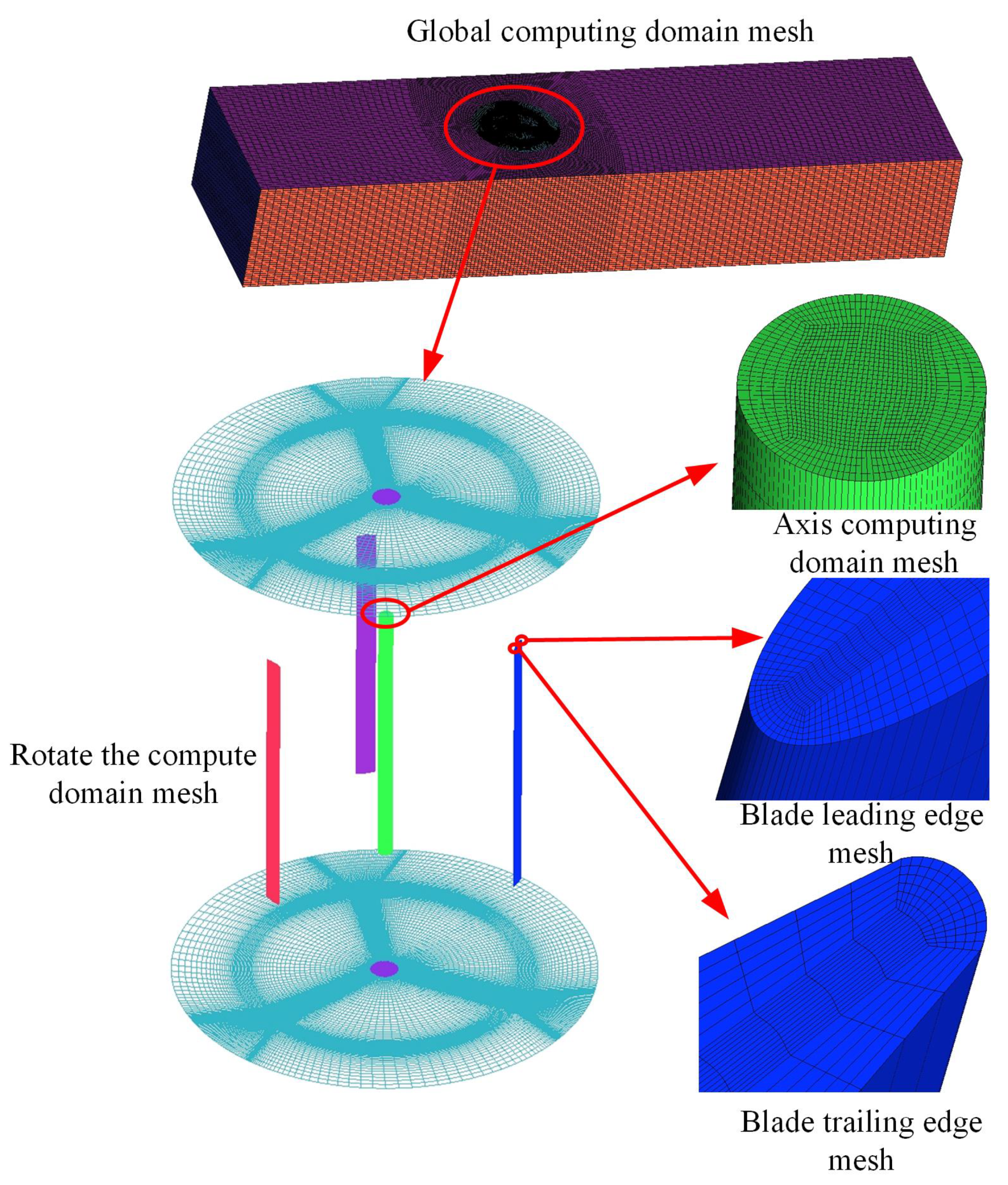
Section 3, we present CFD simulation modeling technology on vertical axis offshore wind turbines, such as the physical model, turbulence model, computational domain, and meshing. In
Section 4, the results and discussion of the vertical axis offshore wind turbine torque and wind energy capture rate, torque coefficient, velocity, and pressure cloud maps are analyzed. We conclude the study in
Section 6.
2. Parameters of the Design of Vertical Axis Offshore Wind Turbines
In the design of vertical axis offshore wind turbine, if the aspect ratio of offshore wind turbine is not chosen properly, the power coefficient of offshore wind turbine will be low. The design parameters are usually selected according to the experience of the designer. In the design process of offshore wind turbines, curves of power coefficients of different compactness changing with blade tip speed ratio need to be drawn to establish the relationship between aspect ratio and offshore wind turbine performance [
19,
20]. The results show the change curve of wind energy capture rate with tip velocity ratio when the Reynolds number of the NACA0018 airfoil wind generator is selected with
,
,
, and
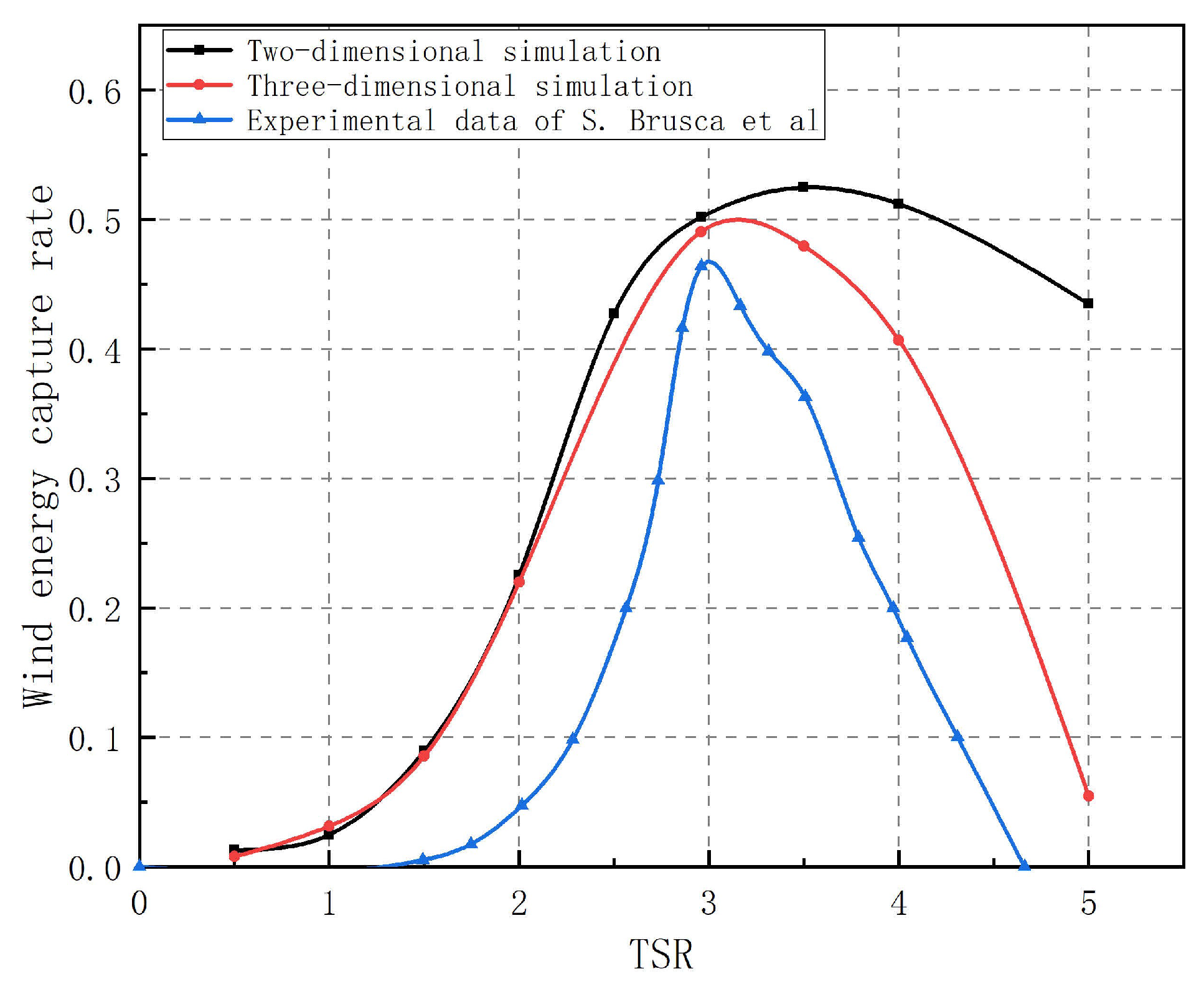
, and compactness is selected with 0.75, 0.5, 0.4, 0.3, 0.2, and 0.1, respectively. It can be seen that the maximum wind capture rate increases with the increase of Reynolds number, and the corresponding tip speed ratio decreases. This study adopts the design process of S. Brusca et al. [
19]. Based on the compactness, the three-blade vertical blade wind generator is designed. One computes the maximum energy capture rate of the wind generator, as well as the corresponding blade tip speed ratio, which are shown in
Figure 2.
The study shows the change curve of wind energy capture rate with blade tip speed ratio under different compactness with Reynolds number
. It can be seen when the compactness
that the maximum wind energy capture rate of the wind generator
and the corresponding blade tip speed ratio
. Where the compactness can be changed by the number of blades, chord length, and rotation radius, reflecting the proportion of blades in the sweep surface. The curve of wind energy capture rate corresponding to low compactness is relatively smooth. When the blade tip speed ratio changes in a wide window, the range of wind energy capture rate changes is small, but it increases the resistance to wind, so the maximum wind energy capture rate is small. Under high compactness, the wind energy utilization curve is sharper, the maximum wind energy capture rate is larger, and it is more sensitive to the change of tip velocity ratio. If the compactness is too large, the maximum wind capture rate has a relatively low maximum value, and the decrease in the maximum wind capture rate is caused by the stall loss. The compactness is expressed by Equation (
1):
Here,
N is the number of offshore wind turbine blades.
r is rotate radius. The function of blade chord length can be expressed by the description of compactness
c.
c is shown by the following Equation (
2):
In the formula,
is the corresponding compactness when the offshore wind turbine obtains the maximum wind energy capture rate. The actual power of the offshore wind turbine is expressed by Equation (
3):
Here,
is the wind energy utilization factor. The horizontal axis offshore wind turbine aspect ratio is defined as the ratio of leaf length and leaf chord length. In this study, the vertical axis offshore wind turbines aspect ratio
is defined as the ratio of offshore wind turbine blade height
h and rotate radius
r. The radius of rotation is inversely proportional to the height of the blade. In the initial design, the offshore wind turbine has a relatively small aspect chord, which is aimed for minimize the blade height and shaft diameter for a given sweep area. When the blade tip speed ratio is fixed, if the aspect ratio is increased, the rotor speed will increase; if the power is constant, the torque will decrease. The aspect ratio is expressed by Equation (
4):
According to Equations (
3) and (
4), the rotating radius of offshore wind turbine blade can be expressed as Equation (
5):
Here,
P is described in Equation (
3). In iterative design, the Reynolds number of the blade needs to be recalculated. The actual Reynolds number is expressed by Equation (
6):
Here,
W is relative wind speed of blades. In the formula,
is the kinematic viscosity of air. Blade tip speed ratio
is the ratio of the linear velocity of blade rotation around the spindle to the incoming wind speed, reflecting the relative speed of the wind generator, which can be expressed by Equation (
7). When the vertical axis offshore wind turbine is running at high tip ratio, the centrifugal force on the blade is large, which requires high structural strength of the offshore wind turbine.
Using mathematical approximation method, the relative wind speed
W can be replaced by the blade tip speed
and transformed into the mean Reynolds number independent of azimuth angle
. Equations (
6) and (
7) can derive Equation (
8) of average Reynolds number:
In the formula, is the blade tip speed ratio corresponding to the maximum wind energy capture rate of the wind generator.
The iterative design process of the offshore wind turbine is shown in
Figure 3. In design, only four parameters, namely rated power
P of offshore wind turbine, number of blades
N, inlet wind speed
, and aspect ratio of offshore wind turbine
, need to be known. In the literature [
19], the wind energy capture rate curve corresponding to the Reynolds number of the initial test is selected first; then, the corresponding
and
when the wind power generator obtains the maximum wind energy capture rate
are found. The radius, chord length, and Reynolds number of the wind power generator are calculated using Equations (
2), (
5), and (
8), respectively. As the Reynolds number changes with the main size of the turbine rotor, the rotor diameter increases and the blade tip speed increases, resulting in the Reynolds number increasing. Therefore, the power coefficient of the offshore wind turbine generator is greatly affected, and it is necessary to calculate the Reynolds number and the Reynolds error of the initial test. If the calculation of the Reynolds number and the initial error using the power coefficient curve of Reynolds number requires one to draw a new Reynolds number or use a Reynolds number wind energy curve similar to the second iteration, ignore the Reynolds number effects on the performance of offshore wind turbine, if the error iteration of the offshore wind turbine parameters is designed for offshore wind turbines. Typically, the iterative design process takes only two or three iterations.
The wind generator is designed according to
Figure 2, and the iterative design parameters are shown in
Table 1. Assuming that the design airfoil is NACA0018, the design parameters of the vertical axis offshore wind turbine are as follows: rated power
P = 2.7 kw, blade number
, design wind speed
= 12 m/s, and aspect ratio
.
5. Analysis of the Method of Optimization for J-Blade Offshore Wind Turbine
According to the study in the previous section, the change of the upper surface of J-shaped blade has little effect on the performance of the wind generator. The analysis of the change of the flow field around the blade shows that when the lower surface of J-shaped blade is located in the upwind direction, there will be greater resistance. Therefore, the structure optimization of the lower surface of J-shaped blade is carried out.
Figure 30 shows the surrounding velocity flow field of J-shaped blade at azimuth angles of 60°, 90° and 120° before and after optimization. When the azimuth angle is at 60°, the velocity flow field and wake effect in the leading edge and middle of the blade are weakened after optimization. When the azimuth angle is at 90°, the velocity flow field at the leading edge of the optimized J-shaped blade increases, while the drag on the lower surface decreases and the wake flow weakens. When the azimuth angle is at 120°, the vortex on the lower surface of the blade is shedding, and the shedding vortex intensity of J-shaped blade decreases after correction. At the same time, because the radian of the lower surface of J-shaped blade decreases after correction, the blade torque increases when the azimuth angle is between 90° and 180°.
Figure 31 and
Figure 32 shows the torque variation curve with azimuth at TSR = 1.5 and TSR = 2.96 before and after optimization of J-blade wind generator. As can be seen from
Figure 31, when TSR = 1.5, the optimized J-blade’s instantaneous torque is significantly improved when the azimuth angle is between 60° and 120°, while when the azimuth angle is between 180° and 360°, the influence of vortex falling off on the optimized J-blade’s torque is greater, and the instantaneous torque is not as good as before. As can be seen from
Figure 32, when TSR = 2.96, the optimized blade has little change in instantaneous torque when the azimuth angle is between 0° and 180°, and when the azimuth angle is between 180° and 360°, the instantaneous torque provided by the J-shaped blade is small or even negative, while the optimized J-shaped blade’s torque decreases when the azimuth angle is between 180° and 360°.
The maximum instantaneous torque change of blade after optimization is shown in
Table 5. First of all, it can be seen that after optimization, the maximum blade torque increases when
, and the smaller the blade tip speed ratio is, the greater the increase range is, and the maximum torque at startup stage is significantly improved. When
, the maximum increase of blade instantaneous maximum torque is
, when
, the maximum increase of blade instantaneous maximum torque is 43.23%, and when
, the maximum increase of blade maximum torque is 4.5%.
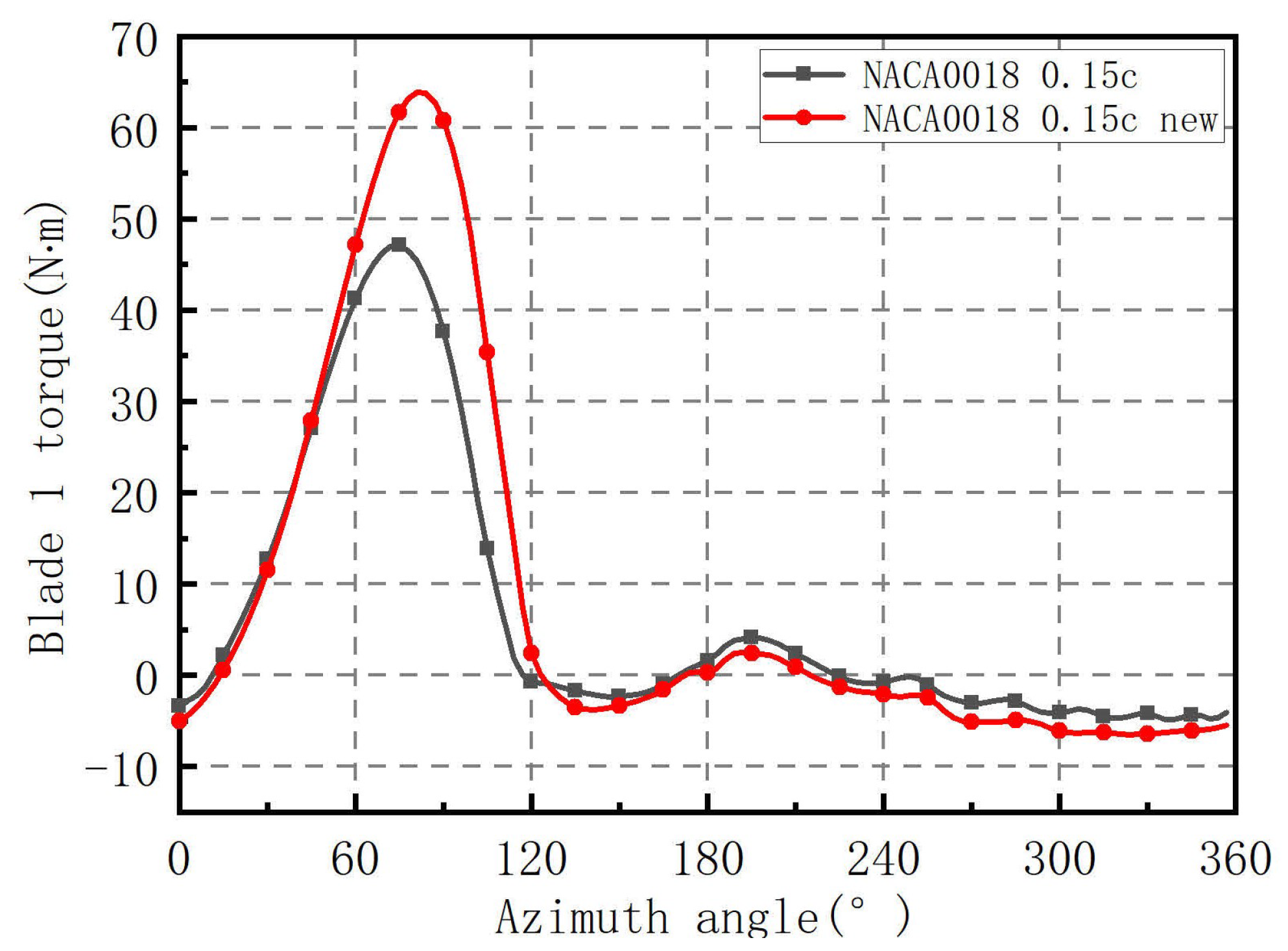
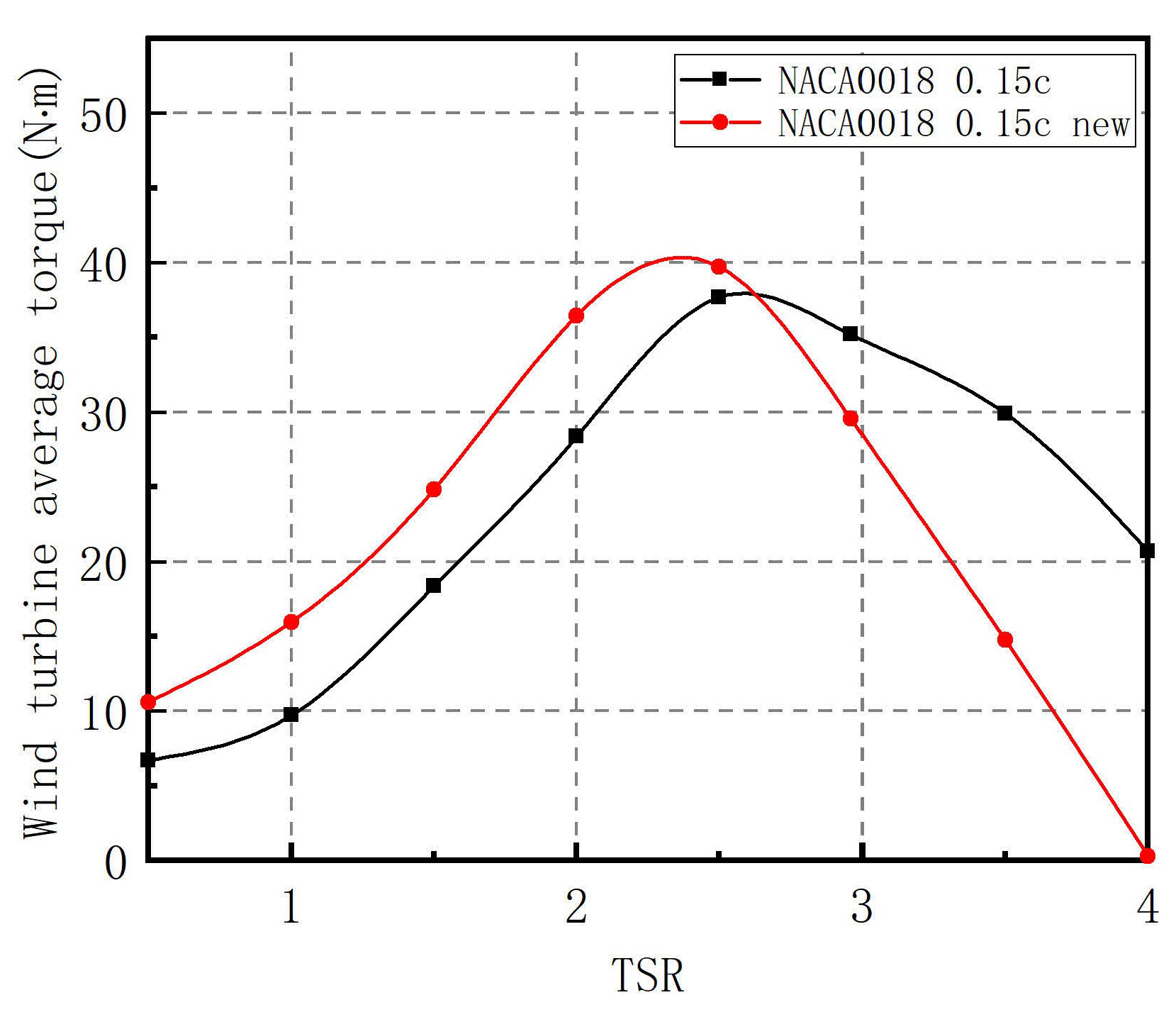
Figure 33 and
Figure 34 show variation curves of instantaneous torque and average torque of J-blade wind generator before and after optimization.
Figure 33 shows the wind generator’s instantaneous torque at
. Since the torque of the wind generator is superposed by three blades with a difference of 120°, the optimized J-blade wind generator’s instantaneous torque increases greatly when the azimuth angles are selected in the intervals of [60°,120°], [180°,240°], or [300°,360°], corresponding to the azimuth angles of the blade’s instantaneous torque increase. It can be seen from
Figure 34 that the average torque of the optimized wind generator increases when
, but decreases rapidly as the blade tip speed ratio continues to increase.
After optimization, the average torque change of offshore wind turbine is shown in
Table 6. It can be seen that after optimization, the average torque of the wind generator increases first and then decreases when
. When
, the average torque of the offshore wind turbine is increased by 16.80 N·m at most, and when
, the average torque of the offshore wind turbine is increased by 64.05% at most, but the average torque of the offshore wind turbine blade is reduced by 16.02% at
. After optimization, the average torque of the wind generator is improved when
, and the improvement is more obvious when the blade tip ratio is low.
The change curve of wind energy capture rate of the J-blade wind generator with tip speed ratio before and after optimization is shown in
Figure 35. It can be seen that the wind energy capture rate increases when
after optimization, and the trend of 2D simulation and 3D simulation is consistent. Due to the influence of space turbulence, the wind energy capture rate of 3D simulation is slightly lower than that of the 2D simulation, and the optimized wind energy capture rate decreases when
.
The wind energy capture rate of the two-dimensional wind generator before and after optimization when
is shown in
Table 7. When
, the maximum increase of wind energy capture rate is 10.78%, and the maximum of wind energy capture rate is 45.96% when
after optimization. It can be seen that after blade optimization, the wind energy capture rate at low blade tip speed ratio is significantly improved.







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}