Designing of Dynamic Spectrum Shifting in Terms of Non-Local Space-Fractional Mechanics



Abstract
1. Introduction
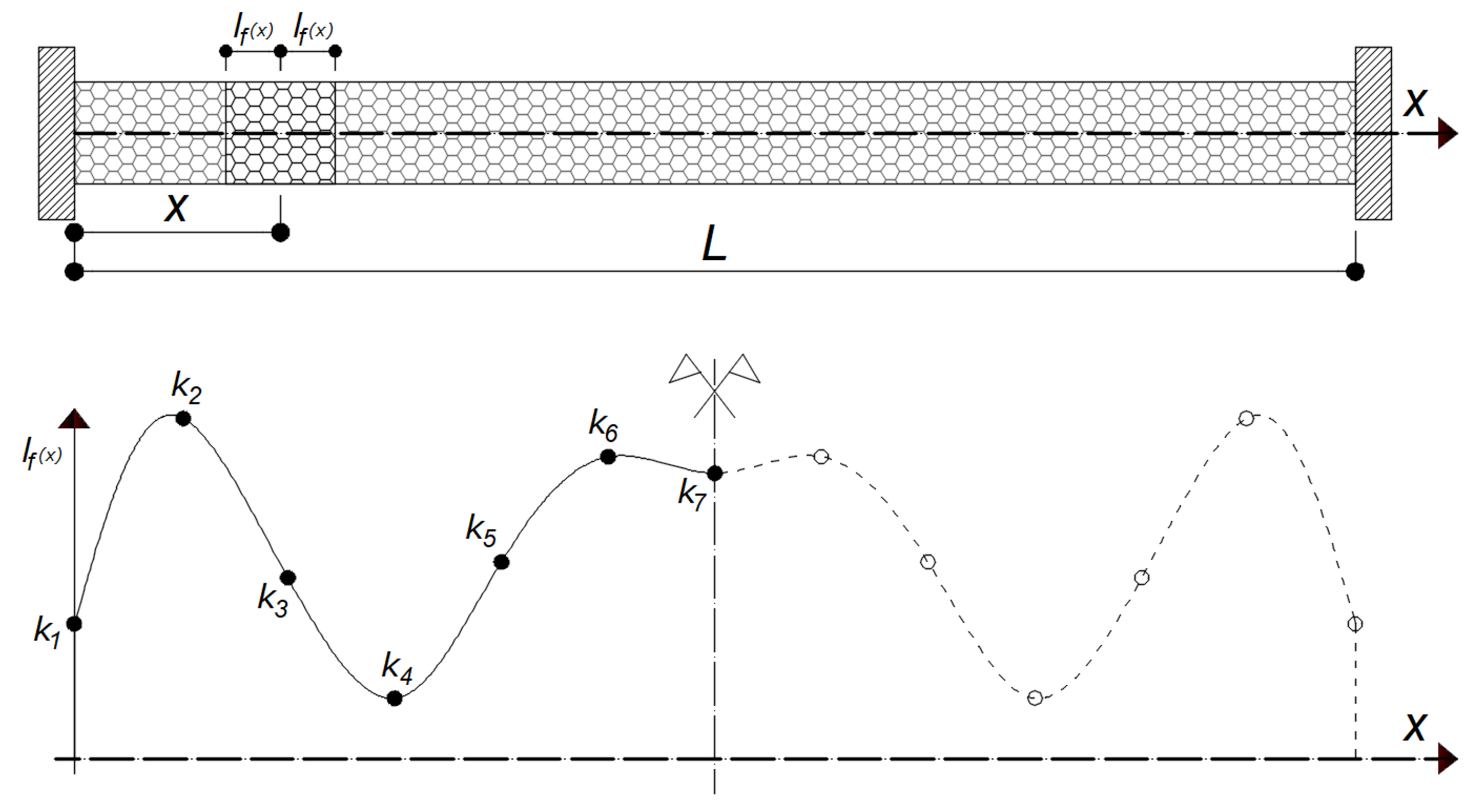
2. Dynamic Equilibrium for 1d Sfcm Body Including Spatially Variable Length Scale
2.1. Governing Equation
2.2. Approximation
2.3. Eigenvalue Problem
3. Eigenvalue Spectrum Shifting—Identification of Length Scale Distribution
3.1. Model
3.2. Dynamic Response Evaluation
3.3. Optimization Problem
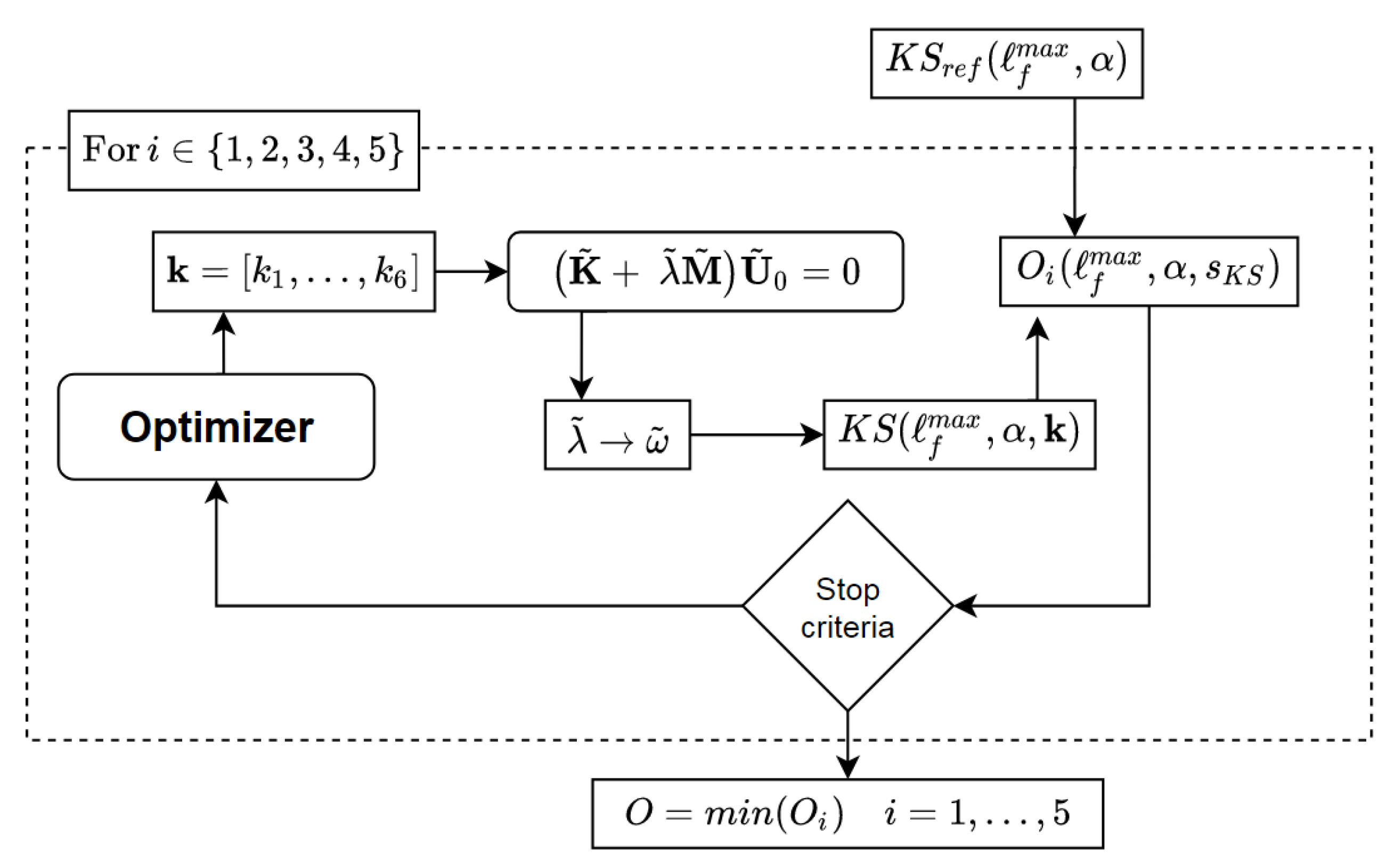
3.4. Algorithm
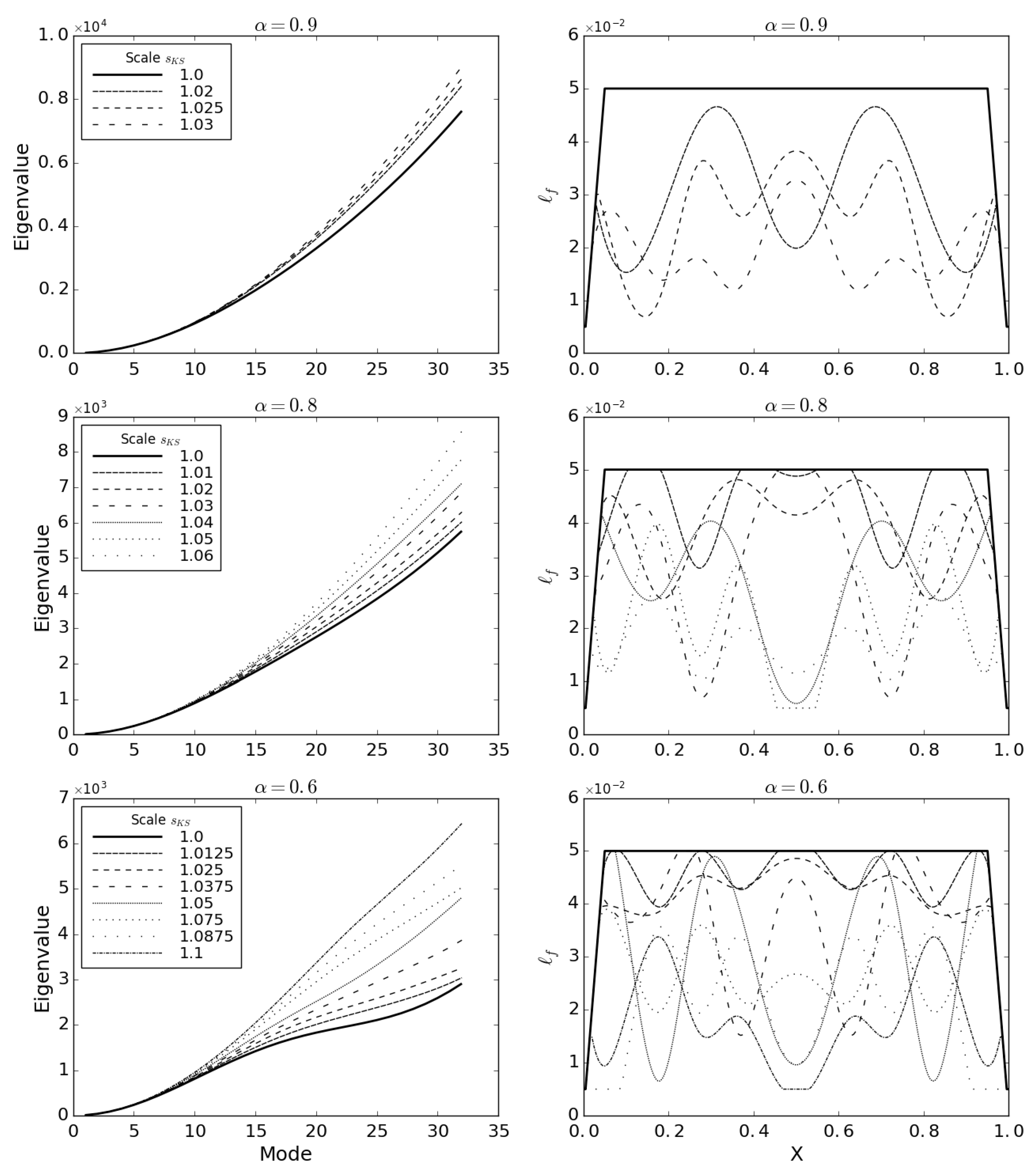
4. Results
5. Conclusions
- Designing the demanding dynamic response of a structure emphasising the scale effect by modifying length scale in the space-Fractional Continuum Mechanical model is possible;
- The potential for modifying dynamic response—measured as a weighted sum of eigenvalues—by changing a length scale is the biggest when the order of material continua and tends to zero for (the classical local model);
- The demanding dynamic response can be obtained by solving the inverse problem utilising hybridized optimization procedure joining the genetic and the limited-memory BFGS algorithms.
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
References
- Duan, H.; Wang, J.; Huang, Z.; Karihaloo, B. Size-dependent effective elastic constants of solids containing nano-inhomogeneities with interface stress. J. Mech. Phys. Solids 2005, 53, 1574–1596. [Google Scholar] [CrossRef]
- Li, Y.; Wei, P.; Tang, Q. Reflection and transmission of elastic waves at the interface between two gradient-elastic solids with surface energy. Eur. J. Mech. A/Solids 2015, 52, 54–71. [Google Scholar] [CrossRef]
- Miller, R.E.; Shenoy, V.B. Size-dependent elastic properties of nanosized structural elements. Nanotechnology 2000, 11, 139–147. [Google Scholar] [CrossRef]
- Zhang, L.; Guo, J.; Xing, Y. Nonlocal analytical solution of functionally graded multilayered one-dimensional hexagonal piezoelectric quasicrystal nanoplates. Acta Mech. 2019, 230, 1781–1810. [Google Scholar] [CrossRef]
- Barretta, R.; Faghidian, S.A.; Marotti de Sciarra, F. Aifantis versus Lam strain gradient models of Bishop elastic rods. Acta Mech. 2019, 230, 2799–2812. [Google Scholar] [CrossRef]
- Liu, D.; Tarakanova, A.; Hsu, C.C.; Yu, M.; Zheng, S.; Yu, L.; Liu, J.; He, Y.; Dunstan, D.J.; Buehler, M.J. Spider dragline silk as torsional actuator driven by humidity. Sci. Adv. 2019, 5, eaau9183. [Google Scholar] [CrossRef]
- Heinisch, M.; Voglhuber-Brunnmaier, T.; Reichel, E.; Dufour, I.; Jakoby, B. Electromagnetically driven torsional resonators for viscosity and mass density sensing applications. Sens. Actuators A Phys. 2015, 229, 182–191. [Google Scholar] [CrossRef]
- Lam, J.K.; Koay, S.C.; Lim, C.H.; Cheah, K.H. A voice coil based electromagnetic system for calibration of a sub-micronewton torsional thrust stand. Measurement 2019, 131, 597–604. [Google Scholar] [CrossRef]
- Xiao, D.; Xia, D.; Li, Q.; Hou, Z.; Liu, G.; Wang, X.; Chen, Z.; Wu, X. A double differential torsional accelerometer with improved temperature robustness. Sens. Actuators A Phys. 2016, 243, 43–51. [Google Scholar] [CrossRef]
- Dang, V.H.; Nguyen, D.A.; Le, M.Q.; Duong, T.H. Nonlinear vibration of nanobeams under electrostatic force based on the nonlocal strain gradient theory. Int. J. Mech. Mater. Des. 2020, 16, 289–308. [Google Scholar] [CrossRef]
- Patnaik, S.; Hollkamp, J.; Semperlotti, F. Applications of variable-order fractional operators: A review. Proc. R. Soc. A Math. Phys. Eng. Sci. 2020, 476. [Google Scholar] [CrossRef] [PubMed]
- Lazopoulos, A.K. On fractional peridynamic deformations. Arch. Appl. Mech. 2016, 86, 1987–1994. [Google Scholar] [CrossRef]
- Postek, E.; Pecherski, R.; Nowak, Z. Peridynamic Simulation of Crushing Processes in Copper Open-Cell Foam. Arch. Metall. Mater. 2019, 64, 1603–1610. [Google Scholar]
- Eringen, A. On differential equations of nonlocal elasticity and solutions of screw dislocations and surface waves. J. Appl. Phys. 1983, 54, 4703–4710. [Google Scholar] [CrossRef]
- Peddieson, J.; Buchanan, G.; McNitt, R. The role of strain gradients in the grain size effect for polycrystals. Int. J. Eng. Sci. 2003, 41, 305–312. [Google Scholar] [CrossRef]
- Eringen, A. Nonlocal Continuum Field Theories; Springer: New York, NY, USA, 2010. [Google Scholar]
- Toupin, R. Elastic materials with couple-stress. Arch. Ration. Mech. Anal. 1962, 11, 385–414. [Google Scholar] [CrossRef]
- Mindlin, R.; Eshel, N. On first strain-gradient theories in linear elasticity. Int. J. Solids Struct. 1968, 4, 109–124. [Google Scholar] [CrossRef]
- Aifantis, E. On the Microstructural Origin of Certain Inelastic Models. J. Eng. Mater. Technol. (ASME) 1984, 106, 326–330. [Google Scholar] [CrossRef]
- Li, J.; Wang, B. Fracture mechanics analysis of an anti-plane crack in gradient elastic sandwich composite structures. Int. J. Mech. Mater. Des. 2019, 15, 507–519. [Google Scholar] [CrossRef]
- Cosserat, E.; Cosserat, F. Theorie des Corps Deformables; Librairie Scientifique A. Hermann et Fils: Paris, France, 1909. [Google Scholar]
- Eringen, A. Linear Theory of Micropolar Elasticity. J. Math. Mech. 1966, 15, 909–923. [Google Scholar]
- Nowacki, W. Theory of Micropolar Elasticity; CISM: Udine, Italy, 1972. [Google Scholar]
- Gurtin, M.; Murdoch, A. A Continuum Theory of Elastic Material Surfaces. Arch. Ration. Mech. Anal. 1975, 57, 291–323. [Google Scholar] [CrossRef]
- Drapaca, C.; Sivaloganathan, S. Brief Review of Continuum Mechanics Theories. Fields Inst. Monogr. 2019, 37, 5–37. [Google Scholar]
- Sumelka, W. Thermoelasticity in the Framework of the Fractional Continuum Mechanics. J. Therm. Stress. 2014, 37, 678–706. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Mathematics in Science and Engineering; Academin Press: Cambridge, MA, USA, 1999; Volume 198. [Google Scholar]
- Kilbas, A.; Srivastava, H.; Trujillo, J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Malinowska, A.; Odzijewicz, T.; Torres, D. Advanced Methods in the Fractional Calculus of Variations; Springer Briefs in Applied Sciences and Technology; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Sumelka, W.; Blaszczyk, T.; Liebold, C. Fractional Euler–Bernoulli beams: Theory, numerical study and experimental validation. Eur. J. Mech. A/Solids 2015, 54, 243–251. [Google Scholar] [CrossRef]
- Stempin, P.; Sumelka, W. Space-fractional Euler-Bernoulli beam model—Theory and identification for silver nanobeam bending. Int. J. Mech. Sci. 2020, 186, 105902. [Google Scholar] [CrossRef]
- Szajek, K.; Sumelka, W. Discrete mass-spring structure identification in nonlocal continuum space-fractional model. Eur. Phys. J. Plus 2019, 134, 448. [Google Scholar] [CrossRef]
- Kreisselmeier, G.; Steinhauser, R. Systematic Control Design by Optimizing a Vector Performance Index. In Proceedings of the IFAC Symposium on computer Aided Design of Control Systems, Zurich, Switzerland, 29–31 August 1979; Volume 12, pp. 113–117. [Google Scholar] [CrossRef]
- Sumelka, W.; Zaera, R.; Fernández-Sáez, J. A theoretical analysis of the free axial vibration of non-local rods with fractional continuum mechanics. Meccanica 2015, 50, 2309–2323. [Google Scholar] [CrossRef]
- Sumelka, W.; Zaera, R.; Fernández-Sáez, J. One-dimensional dispersion phenomena in terms of fractional media. Eur. Phys. J. Plus 2016, 131, 320. [Google Scholar] [CrossRef][Green Version]
- Sumelka, W. On fractional non-local bodies with variable length scale. Mech. Res. Commun. 2017, 86, 5–10. [Google Scholar] [CrossRef]
- Hall, F.; Hayhurst, D. Modelling of Grain Size Effects in Creep Crack Growth Using a Non-Local Continuum Damage Approach. Proc. Math. Phys. Sci. 1991, 433, 405–421. [Google Scholar]
- Peerlings, R.; Geers, M.; de Borst, R.; Brekelmans, W. A critical comparison of nonlocal and gradient-enhanced softening continua. Int. J. Solids Struct. 2001, 38, 7723–7746. [Google Scholar] [CrossRef]
- Szajek, K.; Sumelka, W.; Blaszczyk, T.; Bekus, K. On selected aspects of space-fractional continuum mechanics model approximation. Int. J. Mech. Sci. 2020, 167, 105287. [Google Scholar] [CrossRef]
- Strang, G. Linear Algebra and Its Applications, 2nd ed.; Academic Press Inc.: Orlando, FL, USA, 1980. [Google Scholar]
- Byrd, R.H.; Lu, P.; Nocedal, J.; Zhu, C. A Limited Memory Algorithm for Bound Constrained Optimization. SIAM J. Sci. Stat. Comput. 1995, 16, 1190–1208. [Google Scholar] [CrossRef]
- Zhu, C.; Byrd, R.H.; Lu, P.; Nocedal, J. L-BFGS-B, FORTRAN routines for large scale bound constrained optimization. ACM Trans. Math. Softw. 1997, 23, 550–560. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.05 | 0.025 | 0.005 | 0.0025 | 0.05 | 0.025 | ||||
|---|---|---|---|---|---|---|---|---|---|
| 0.9 | 390.5 | 994.6 | 405.1 | 1096.2 | 0.9 | 1.04 | 1.10 | ||
| 0.8 | 378.2 | 907.3 | 404.8 | 1094.3 | 0.8 | 1.07 | 1.21 | ||
| 0.6 | 358.9 | 772.1 | 404.4 | 1091.4 | 0.6 | 1.13 | 1.41 | ||
| O | Parameters k | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 0.025 | 0.6 | 1 | 5.95 | 2.50 | 2.50 | 2.50 | 2.50 | 2.50 | 2.50 |
| 1.05 | 8.97 | 2.41 | 2.22 | 2.00 | 2.50 | 2.22 | 2.29 | ||
| 1.1 | 1.74 | 2.50 | 2.27 | 2.43 | 1.78 | 7.84 | 2.23 | ||
| 1.15 | 7.88 | 6.50 | 1.97 | 3.14 | 1.63 | 2.48 | 9.95 | ||
| 1.2 | 1.00 | 1.54 | 1.81 | 8.08 | 1.85 | 7.54 | 1.76 | ||
| 1.25 | 2.01 | 2.25 | 1.29 | 1.41 | 1.51 | 1.35 | 1.40 | ||
| 1.3 | 3.17 | 9.60 | 7.29 | 8.83 | 1.62 | 1.46 | 7.67 | ||
| 1.4 | 1.19 | 3.23 | 6.64 | 2.59 | 5.78 | 2.74 | 2.50 | ||
| 0.8 | 1 | 2.47 | 2.50 | 2.50 | 2.50 | 2.50 | 2.50 | 2.50 | |
| 1.05 | 2.01 | 1.41 | 2.35 | 1.23 | 1.87 | 2.29 | 2.36 | ||
| 1.1 | 1.28 | 4.76 | 1.01 | 1.03 | 1.93 | 2.26 | 1.86 | ||
| 1.15 | 1.95 | 2.37 | 6.52 | 2.50 | 8.64 | 1.87 | 1.30 | ||
| 1.2 | 3.14 | 2.50 | 3.04 | 4.77 | 4.80 | 6.29 | 4.14 | ||
| 0.9 | 1 | 3.23 | 2.50 | 2.50 | 2.50 | 2.50 | 2.50 | 2.50 | |
| 1.01 | 8.94 | 2.50 | 2.50 | 2.50 | 1.99 | 2.39 | 2.35 | ||
| 1.02 | 1.60 | 1.36 | 2.10 | 2.16 | 2.02 | 2.39 | 2.39 | ||
| 1.03 | 2.44 | 7.54 | 2.44 | 2.07 | 1.37 | 2.47 | 1.80 | ||
| 1.05 | 5.18 | 9.02 | 6.43 | 1.97 | 2.43 | 2.17 | 5.65 | ||
| 1.06 | 2.21 | 1.54 | 1.75 | 5.14 | 2.37 | 2.50 | 1.24 | ||
| O | Parameters k | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 0.05 | 0.6 | 1 | 1.47 | 5.00 | 5.00 | 5.00 | 5.00 | 5.00 | 5.00 |
| 1.0125 | 1.21 | 1.61 | 4.96 | 3.94 | 5.00 | 4.28 | 4.97 | ||
| 1.025 | 6.82 | 3.53 | 3.90 | 3.87 | 4.53 | 4.29 | 4.75 | ||
| 1.0375 | 1.39 | 4.46 | 3.70 | 4.28 | 4.84 | 1.55 | 3.85 | ||
| 1.05 | 4.99 | 3.06 | 4.21 | 6.63 | 4.35 | 3.99 | 1.40 | ||
| 1.075 | 1.67 | 1.71 | 3.42 | 1.97 | 3.59 | 2.25 | 2.52 | ||
| 1.0875 | 2.57 | 5.01 | 6.01 | 3.57 | 1.93 | 3.40 | 1.46 | ||
| 1.1 | 2.79 | 2.67 | 1.64 | 3.37 | 1.56 | 1.88 | 6.54 | ||
| 0.8 | 1 | 1.63 | 5.00 | 5.00 | 5.00 | 5.00 | 5.00 | 5.00 | |
| 1.01 | 1.99 | 2.87 | 4.76 | 5.00 | 3.14 | 4.91 | 4.98 | ||
| 1.02 | 2.63 | 1.92 | 4.25 | 2.56 | 3.91 | 4.81 | 4.27 | ||
| 1.03 | 2.34 | 2.66 | 3.94 | 3.67 | 7.17 | 3.02 | 4.95 | ||
| 1.04 | 1.58 | 5.00 | 3.17 | 2.62 | 3.91 | 3.32 | 1.00 | ||
| 1.05 | 2.38 | 5.00 | 1.78 | 3.94 | 1.48 | 3.20 | 5.00 | ||
| 1.06 | 1.46 | 2.33 | 1.70 | 2.57 | 1.05 | 1.98 | 1.35 | ||
| 0.9 | 1 | 1.08 | 5.00 | 5.00 | 5.00 | 5.00 | 5.00 | 5.00 | |
| 1.02 | 6.99 | 4.29 | 1.55 | 2.57 | 4.39 | 4.26 | 2.34 | ||
| 1.025 | 1.19 | 3.69 | 1.38 | 1.09 | 3.60 | 2.60 | 3.54 | ||
| 1.03 | 1.08 | 9.70 | 2.50 | 1.38 | 1.80 | 1.21 | 2.89 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szajek, K.; Sumelka, W.; Bekus, K.; Blaszczyk, T. Designing of Dynamic Spectrum Shifting in Terms of Non-Local Space-Fractional Mechanics. Energies 2021, 14, 506. https://doi.org/10.3390/en14020506
Szajek K, Sumelka W, Bekus K, Blaszczyk T. Designing of Dynamic Spectrum Shifting in Terms of Non-Local Space-Fractional Mechanics. Energies. 2021; 14(2):506. https://doi.org/10.3390/en14020506
Chicago/Turabian StyleSzajek, Krzysztof, Wojciech Sumelka, Krzysztof Bekus, and Tomasz Blaszczyk. 2021. "Designing of Dynamic Spectrum Shifting in Terms of Non-Local Space-Fractional Mechanics" Energies 14, no. 2: 506. https://doi.org/10.3390/en14020506
APA StyleSzajek, K., Sumelka, W., Bekus, K., & Blaszczyk, T. (2021). Designing of Dynamic Spectrum Shifting in Terms of Non-Local Space-Fractional Mechanics. Energies, 14(2), 506. https://doi.org/10.3390/en14020506