
Analysis of the Energy Efficiency Improvement in a Load-Sensing Hydraulic System Built on the ISO Plate


Abstract
:1. Introduction
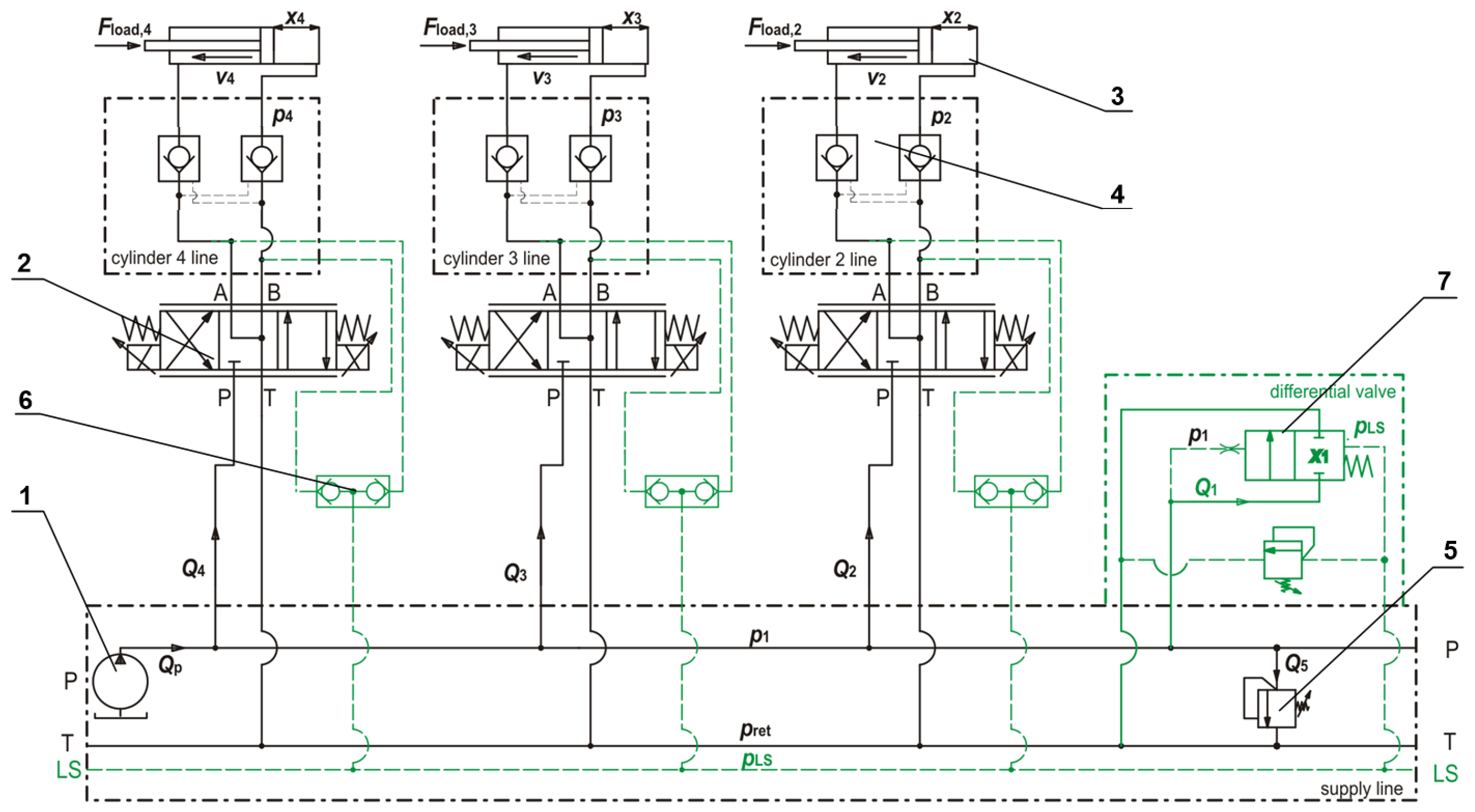
2. Working Principle of the Analysed System
3. Formulating a Mathematical Model
4. Structure and Parameters of Simulation Model
5. Results of Numerical Simulation and Discussion
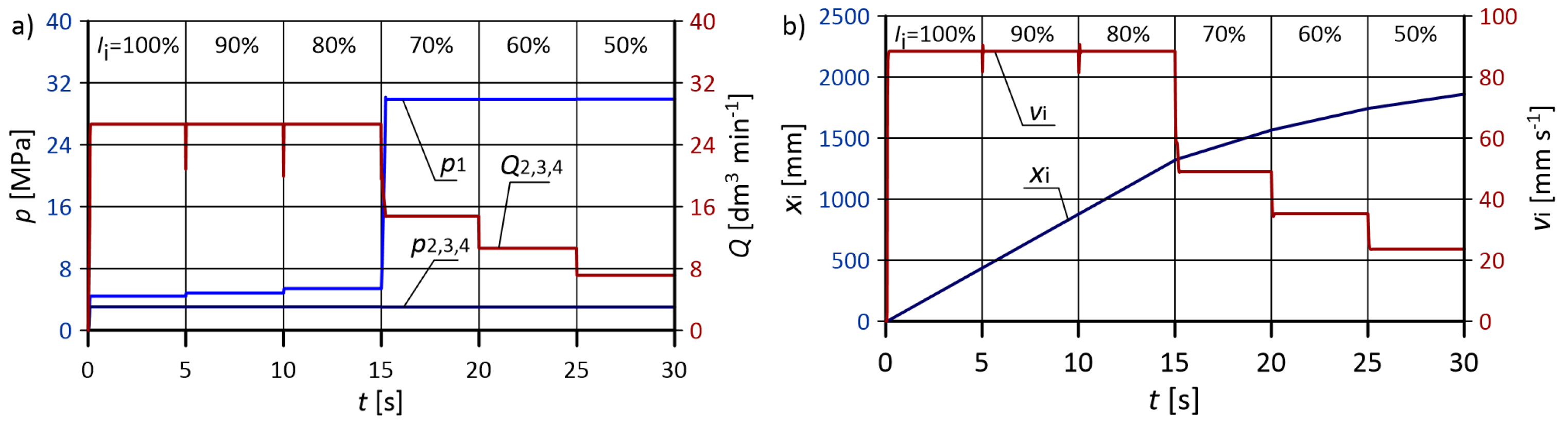
- equal actuator loads and fixed control signals for proportional valves,
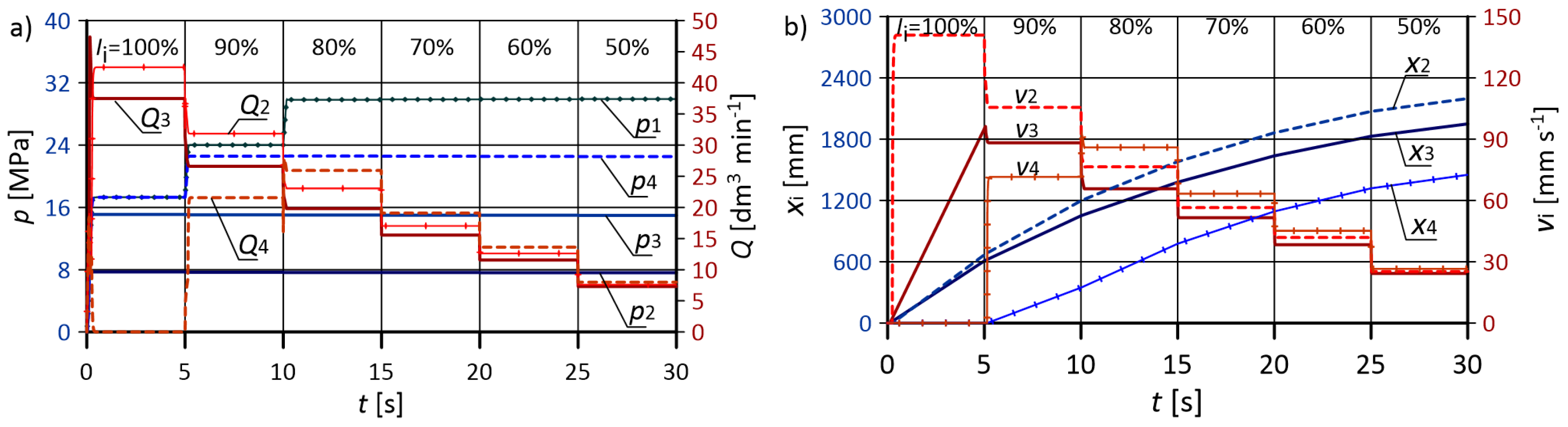
- various actuator loads and fixed control signals for proportional valves,
- proportional valve control for obtaining equal speeds of actuators with different loads.
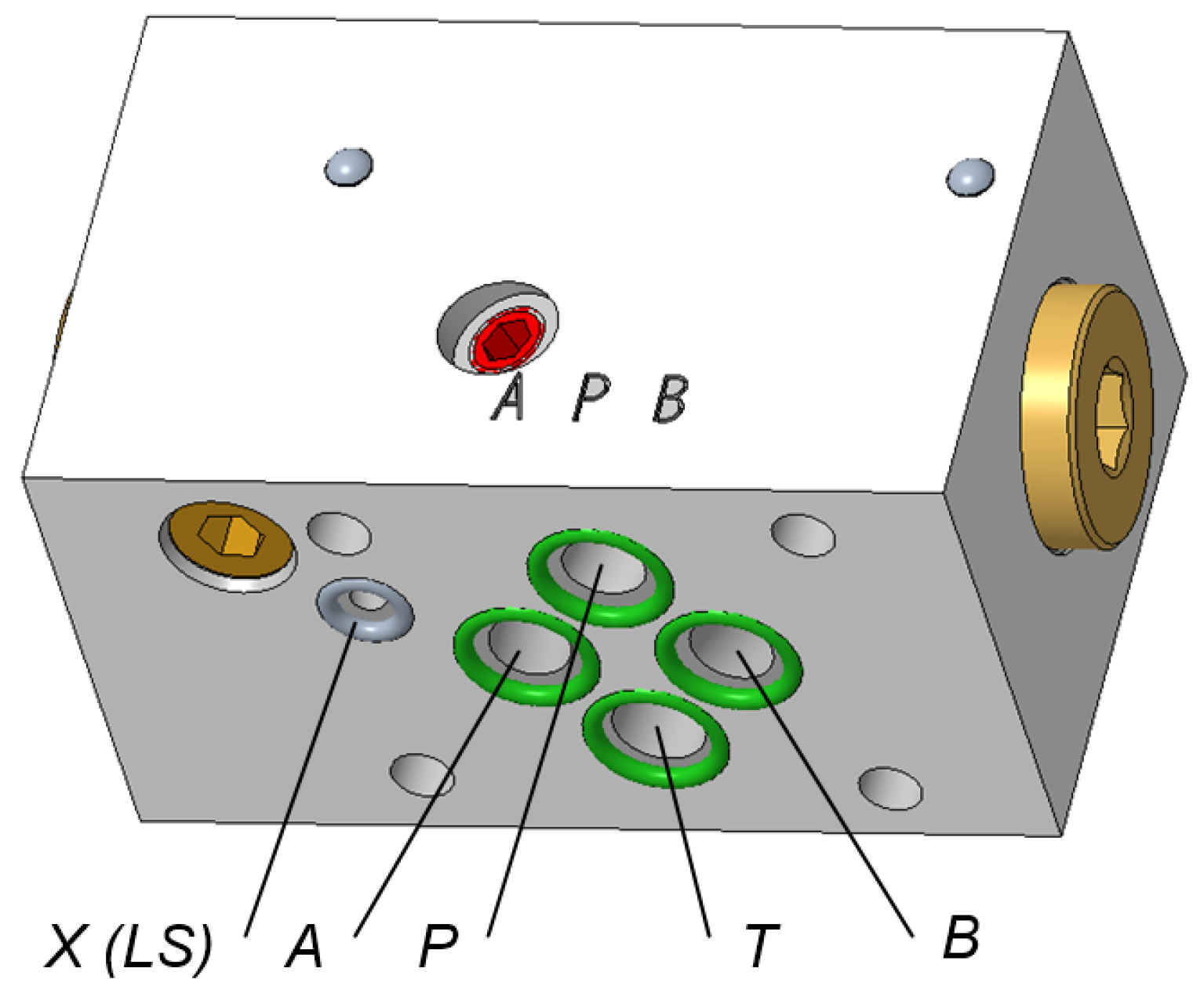
- although the load-sensing technique is generally well known, it has so far not been used industrially with ISO 4401 (formerly the CETOP standard) in a modular (sandwich) arrangement. Thus, the presented solution is an innovative application in industrial technology,
- the presented system is more universal than the currently used section valves due to the wide possibilities of expansion in a sandwich system by installing various types of valves and advanced configuration of individual sections,
- the number of actuators can be arbitrarily large, limited only by the pump capacity,
- unlike other solutions, only standard, typical hydraulic components were used. There is no need to modify them or use advanced electronic systems and control algorithms, which is crucial for the possibility of practical applications.
- practical use is limited to components with ISO 4401 connectors (which means that it is dedicated to a specific type of connection according to the standard),
- the system can only work with distributors which, in their neutral position, relief A and B channels in order to send a proper signal to the load-sensing line (as shown in Figure 1).
- there is a necessity to use a hydraulic lock (double pilot-operated check valve) in the case when the actuator is loaded with force in the neutral position.
6. Conclusions
- the presented solution is universal, the LSB system can be easily implemented as well as disconnected,
- the use of standard ISO plates is a convenient solution because it allows interchangeability of components from different manufacturers and easier configuration of control elements,
- the proposed system, depending on the load conditions of the actuators, allowed for energy savings from several to even 60–70%,
- the formulated mathematical model and the developed simulation model make it possible to quickly define various work cycles and assess the dynamics of the system and energy consumption in a given cycle,
- to obtain stable operation of the system, it is necessary to carefully select the spring stiffness and the damping coefficient of the spool in the differential valve,
- the use of an additional differential valve is associated with the appearance of some pressure losses, however, the benefits obtained from its use exceed this cost significantly,
- the proposed LSB system uses the currently available industrial design of a differential valve. In the future, research is planned to reduce pressure losses across the differential valve by optimizing the geometry of the spool and flow paths.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| Indices | |
| 1 | differential valve and supply line |
| i | actuator line, where |
| 5 | relief valve |
| return line | |
| Parameters | |
| cross-sectional area: differential valve spool, relief valve poppet (m) | |
| hydraulic cylinder piston area, piston area with the rod area excluded (m) | |
| flow gap area: differential valve, relief valve (m) | |
| fluid bulk modulus (Pa) | |
| spring stiffness: differential valve, relief valve (Nm) | |
| total energy consumption per operating cycle (kJ) | |
| external force exerted on hydraulic cylinders (N) | |
| control valve control signal (percentage) (%) | |
| pump, nominal, maximum flow rate, flow rate at a certain point (dmmin, m3 s−1) | |
| volume: initial, supply line, actuator lines (m) | |
| differential valve spool diameter (m) | |
| hydraulic cylinder piston diameter and rod diameter (mm) | |
| mass: differential valve spool, pistons with rods, relief valve poppet (kg) | |
| pressure: supply line, actuator lines, return line, load-sensing; pressure drop (MPa) | |
| time, start-up time (s) | |
| position: differential valve spool, hydraulic cylinder piston, relief valve poppet (m) | |
| initial spring compression: differential valve, relief valve (mm) | |
| differential valve poppet opening angle (°) | |
| differential valve jet angle coefficient (-) | |
| contraction coefficient: differential valve gap, relief valve gap (-) | |
| fluid density (kg m) | |
| damping coefficient (Nsm) |
References
- Chao, Q.; Zhang, J.; Xu, B.; Shang, Y.; Jiao, Z.; Li, Z. Load-Sensing Pump Design to Reduce Heat Generation of Electro-Hydrostatic Actuator Systems. Energies 2018, 11, 2266. [Google Scholar] [CrossRef] [Green Version]
- Shang, Y.; Liu, X.; Jiao, Z.; Wu, S. An integrated load sensing valve-controlled actuator based on power-by-wire for aircraft structural test. Aerosp. Sci. Technol. 2018, 77, 117–128. [Google Scholar] [CrossRef]
- Bigliardi, E.; Francia, M.; Milani, M.; Montorsi, L.; Paltrinieri, F.; Stefani, M. Multi-phase and Multi-component CFD Analysis of a Load—Sensing Proportional Control Valve. IFAC-PapersOnLine 2015, 48, 421–426. [Google Scholar] [CrossRef] [Green Version]
- Gradl, C.; Scheidl, R. Performance of an Energy Efficient Low Power Stepper Converter. Energies 2017, 10, 445. [Google Scholar] [CrossRef] [Green Version]
- Scheidl, R. The Hydraulically Controlled Oscillating Piston Converter. Energies 2021, 14, 2156. [Google Scholar] [CrossRef]
- Pan, M.; Plummer, A.; El Agha, A. Theoretical and Experimental Studies of a Switched Inertance Hydraulic System in a Four-Port High-Speed Switching Valve Configuration. Energies 2017, 10, 780. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Wang, B. An Energy-Saving Control Strategy with Load Sensing for Electro-Hydraulic Servo Systems. Stroj. Vestn./J. Mech. Eng. 2016, 62, 709–716. [Google Scholar] [CrossRef]
- Bedotti, A.; Campanini, F.; Pastori, M.; Riccò, L.; Casoli, P. Energy saving solutions for a hydraulic excavator. Energy Procedia 2017, 126, 1099–1106. [Google Scholar] [CrossRef]
- Bedotti, A.; Pastori, M.; Casoli, P. Modelling and energy comparison of system layouts for a hydraulic excavator. Energy Procedia 2018, 148, 26–33. [Google Scholar] [CrossRef]
- Ding, R.; Zhang, J.; Xu, B.; Cheng, M.; Pan, M. Energy efficiency improvement of heavy-load mobile hydraulic manipulator with electronically tunable operating modes. Energy Convers. Manag. 2019, 188, 447–461. [Google Scholar] [CrossRef]
- Cheng, M.; Zhang, J.; Xu, B.; Ding, R. An Electrohydraulic Load Sensing System based on flow/pressure switched control for mobile machinery. ISA Trans. 2020, 96, 367–375. [Google Scholar] [CrossRef] [PubMed]
- Siebert, J.; Wydra, M.; Geimer, M. Efficiency Improved Load Sensing System—Reduction of System Inherent Pressure Losses. Energies 2017, 10, 941. [Google Scholar] [CrossRef] [Green Version]
- Novak, P.; Guinot, V.; Jeffrey, A.; Reeve, D.E. Hydraulic Modelling—An Introduction: Principles, Methods and Applications; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2010. [Google Scholar]
- Kuehnlein, M.; Liermann, M.; Ewald, J.; Murrenhoff, H. Adjustable flow-control valve for the self-energising electro-hydraulic brake. Int. J. Fluid Power 2012, 13, 5–14. [Google Scholar] [CrossRef]
- Milecki, A.; Rybarczyk, D. Modelling of an electrohydraulic proportional valve with a synchronous motor. Stroj. Vestn./J. Mech. Eng. 2015, 61, 517–522. [Google Scholar] [CrossRef]
- Casoli, P.; Pompini, N.; Riccò, L. Simulation of an Excavator Hydraulic System Using Nonlinear Mathematical Models. Stroj. Vestn./J. Mech. Eng. 2015, 61, 583–593. [Google Scholar] [CrossRef] [Green Version]
- Lisowski, E.; Filo, G. CFD analysis of the characteristics of a proportional flow control valve with an innovative opening shape. Energy Convers. Manag. 2016, 123, 15–28. [Google Scholar] [CrossRef]
- Naseradinmousavi, P.; Nataraj, C. Nonlinear mathematical modeling of butterfly valves driven by solenoid actuators. Appl. Math. Model. 2011, 35, 2324–2335. [Google Scholar] [CrossRef]
- Du, X.; Nydal, O.J. Flow models and numerical schemes for single/two-phase transient flow in one dimension. Appl. Math. Model. 2017, 42, 145–160. [Google Scholar] [CrossRef] [Green Version]
- Antelmi, M.; Renoldi, F.; Alberti, L. Analytical and Numerical Methods for a Preliminary Assessment of the Remediation Time of Pump and Treat Systems. Water 2020, 12, 2850. [Google Scholar] [CrossRef]
- Lisowski, E.; Czyżycki, W.; Rajda, J. Three dimensional CFD analysis and experimental test of flow force acting on the spool of solenoid operated directional control valve. Energy Convers. Manag. 2013, 70, 220–229. [Google Scholar] [CrossRef]
- Lisowski, E.; Filo, G.; Rajda, J. Pressure compensation using flow forces in a multi-section proportional directional control valve. Energy Convers. Manag. 2015, 103, 1052–1064. [Google Scholar] [CrossRef]
- Valdés, J.R.; Miana, M.J.; Núñez, J.L.; Pütz, T. Reduced order model for estimation of fluid flow and flow forces in hydraulic proportional valves. Energy Convers. Manag. 2008, 49, 1517–1529. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Denotation | Value | Unit |
|---|---|---|---|
| Nominal pump delivery | 80 | dm3 · min−1 | |
| Fluid density | 840 | kg · m−3 | |
| Fluid bulk modulus | MPa | ||
| Relief valve pressure | MPa | ||
| Return line pressure | MPa | ||
| Differential valve spool diameter | mm | ||
| Differential valve spool movement range | mm | ||
| Differential valve spring stiffness | N · mm−1 | ||
| Differential valve damping coefficient | N · s · mm−1 | ||
| Hydraulic cylinder piston diameter | , , | mm | |
| Hydraulic cylinder rod diameter | , , | mm |
| Name | Denotation | Value | Unit |
|---|---|---|---|
| Solver type and name | variable-step, ode45 (Dormand-Prince) | - | - |
| Initial time step size | s | ||
| Max and min time step size | , | , | s |
| Relative tolerance | - |
| Load Force kN | 15 | 50 | 75 | 100 | 135 |
| Energy consumption—base, kJ | 691.1 | 830.9 | 930.1 | 1028.7 | 1165.7 |
| Energy consumption—LSB, kJ | 183.3 | 457.7 | 654.3 | 850.9 | 1125.8 |
| Relative reduction, % | 73.5 | 44.9 | 29.6 | 17.3 | 3.4 |
| Loads: --, kN | 10-50-50 | 10-50-100 | 30-60-90 | 37.5-75-112.5 | 100-100-135 |
| Energy consumption—base, kJ | 828.5 | 1018.2 | 1014.3 | 1067.2 | 1124.3 |
| Energy consumption—LSB, kJ | 455.1 | 791.1 | 738.4 | 911.0 | 1084.0 |
| Relative reduction, % | 45.0 | 22.3 | 27.2 | 14.6 | 3.6 |
| Loads --, kN | 10-50-50 | 10-50-100 | 30-60-90 | 37.5-75-112.5 | 100-100-135 |
| Control signals , , —base, % | 79, 74, 74 | 78, 74, 70 | 77, 73, 71 | 76, 72, 68 | 70, 70, 66 |
| Energy consumption—base, kJ | 189.7 | 191.9 | 191.2 | 191.4 | 191.8 |
| Control signals , , - LSB, % | 70, 82, 82 | 71, 68, 82 | 72, 68, 83 | 73, 70, 83 | 69, 69, 84 |
| Energy consumption—LSB, kJ | 75.3 | 138.3 | 126.2 | 155.1 | 182.6 |
| Relative reduction, % | 60.3 | 28.1 | 34.0 | 18.8 | 4.7 |
| Name, Publication | Additional Components | Geometrical Modifications | Advanced Control System | Hydraulic System Redesign | Avg/Max Energy Saving Ratio (%) |
|---|---|---|---|---|---|
| L-S for EHA pump [1] | Yes | Yes | No | No | n.a. |
| LSVCA [2] | Yes | No | Yes | Yes | efficiency improved times |
| L-S proportional valve [3] | No | Yes | No | No | n.a. |
| Stepper converter [4] | Yes | No | No | Yes | 30%/60% |
| L-S for EHSS [7] | Yes | No | Yes | No | %/90% |
| LS for excavator [9] | No | No | Yes | Yes | fuel saving over 20% |
| multi-DOF manipulator [10] | Yes | No | Yes | Yes | %/% |
| LS with reduced SIPL [12] | Yes | No | No | Yes | SIPL reduced by 44% |
| the studied LSB | Yes | No | No | No | 29%/70% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lisowski, E.; Filo, G.; Rajda, J. Analysis of the Energy Efficiency Improvement in a Load-Sensing Hydraulic System Built on the ISO Plate. Energies 2021, 14, 6735. https://doi.org/10.3390/en14206735
Lisowski E, Filo G, Rajda J. Analysis of the Energy Efficiency Improvement in a Load-Sensing Hydraulic System Built on the ISO Plate. Energies. 2021; 14(20):6735. https://doi.org/10.3390/en14206735
Chicago/Turabian StyleLisowski, Edward, Grzegorz Filo, and Janusz Rajda. 2021. "Analysis of the Energy Efficiency Improvement in a Load-Sensing Hydraulic System Built on the ISO Plate" Energies 14, no. 20: 6735. https://doi.org/10.3390/en14206735