

A Review on Drive Train Technologies for Passenger Electric Vehicles

 and
and 
Abstract
:1. Introduction
- Section 2, looking at EVs’ configurations, explains an overview of the types of EVs, including BEVs, HEVs, PHEVs, and FCHEVs. These cover EVs’ architecture and the technology inside. By doing this, it is expected that the updated technology related to EV types can be provided.
- Section 3, considering key component technologies for EVs, provides detailed explanations of electric motors and batteries used in EVs. This section also describes the EV types, battery capacity, and motor drive types for each EV type. A thorough review of the battery technologies is additionally provided—from the lead-acid battery to the LIB. This point provides an understanding of the current development of battery technology, especially the batteries used in EVs. Furthermore, the most widely used electric motors in EVs, along with the vehicle models, are also presented. This can be used as a reference to determine a suitable electric motor used in EVs based on efficiency, power density, speed, reliability, size, and cost.
- Section 4, looking at opportunities and challenges, predicts the future in transportation and the challenges faced by EVs, such as battery performance improvement, charging time, policy and regulation, and open electricity market. These challenges are important to open a new perspective on EVs and the trend towards EVs in the future.
2. EVs’ Configurations
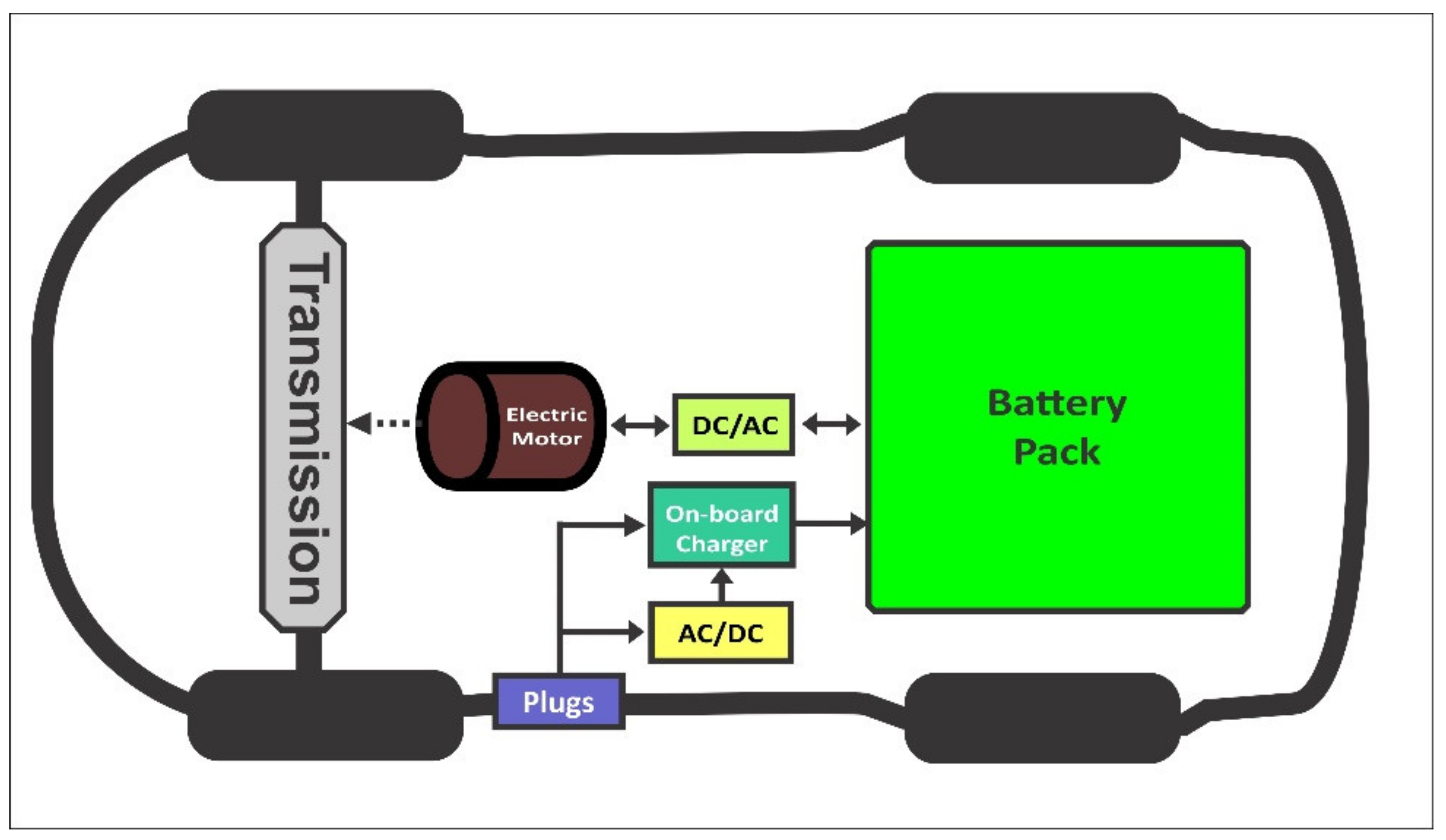
2.1. Battery Electric Vehicles (BEVs)
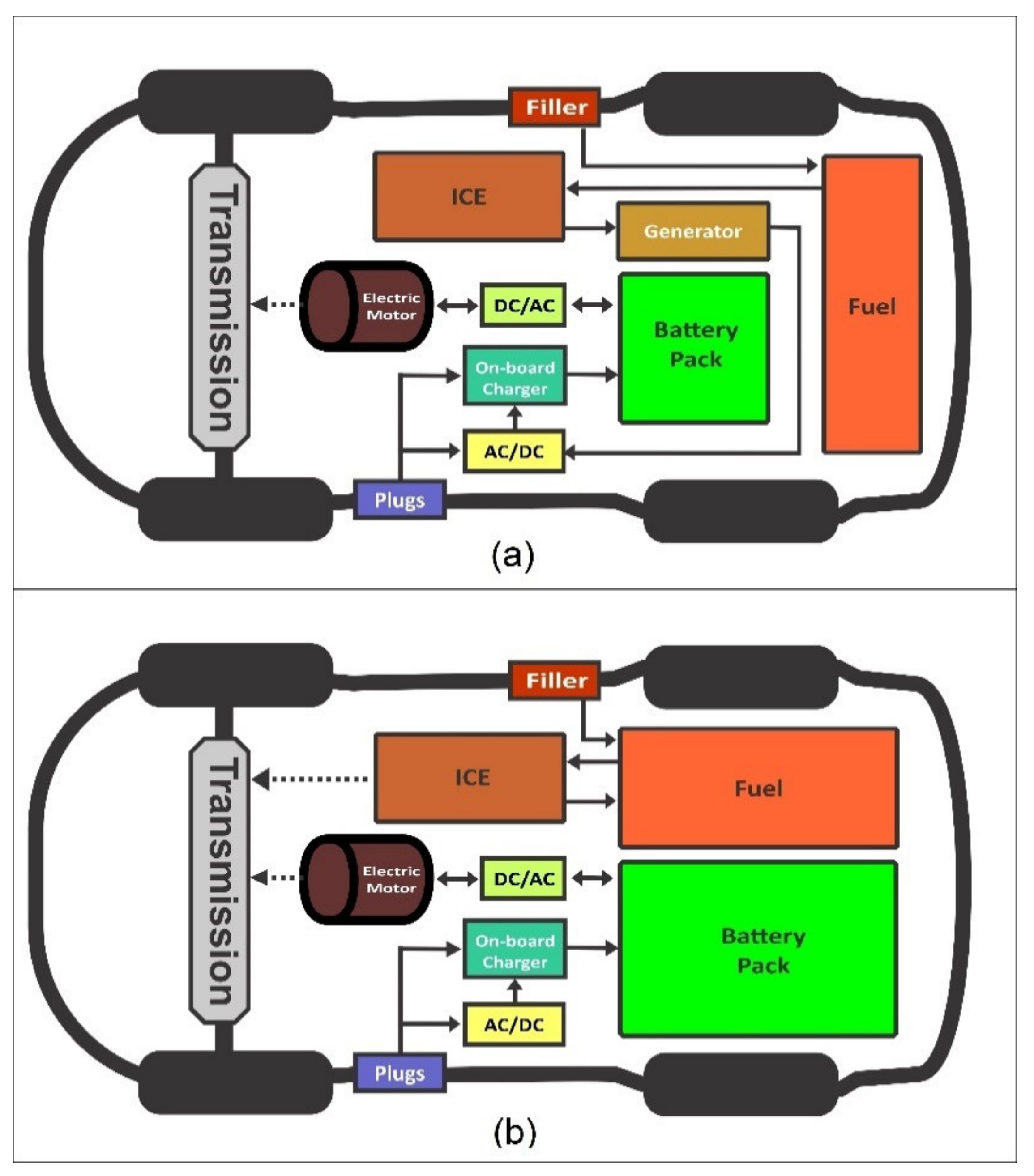
2.2. Hybrid Electric Vehicles (HEVs)
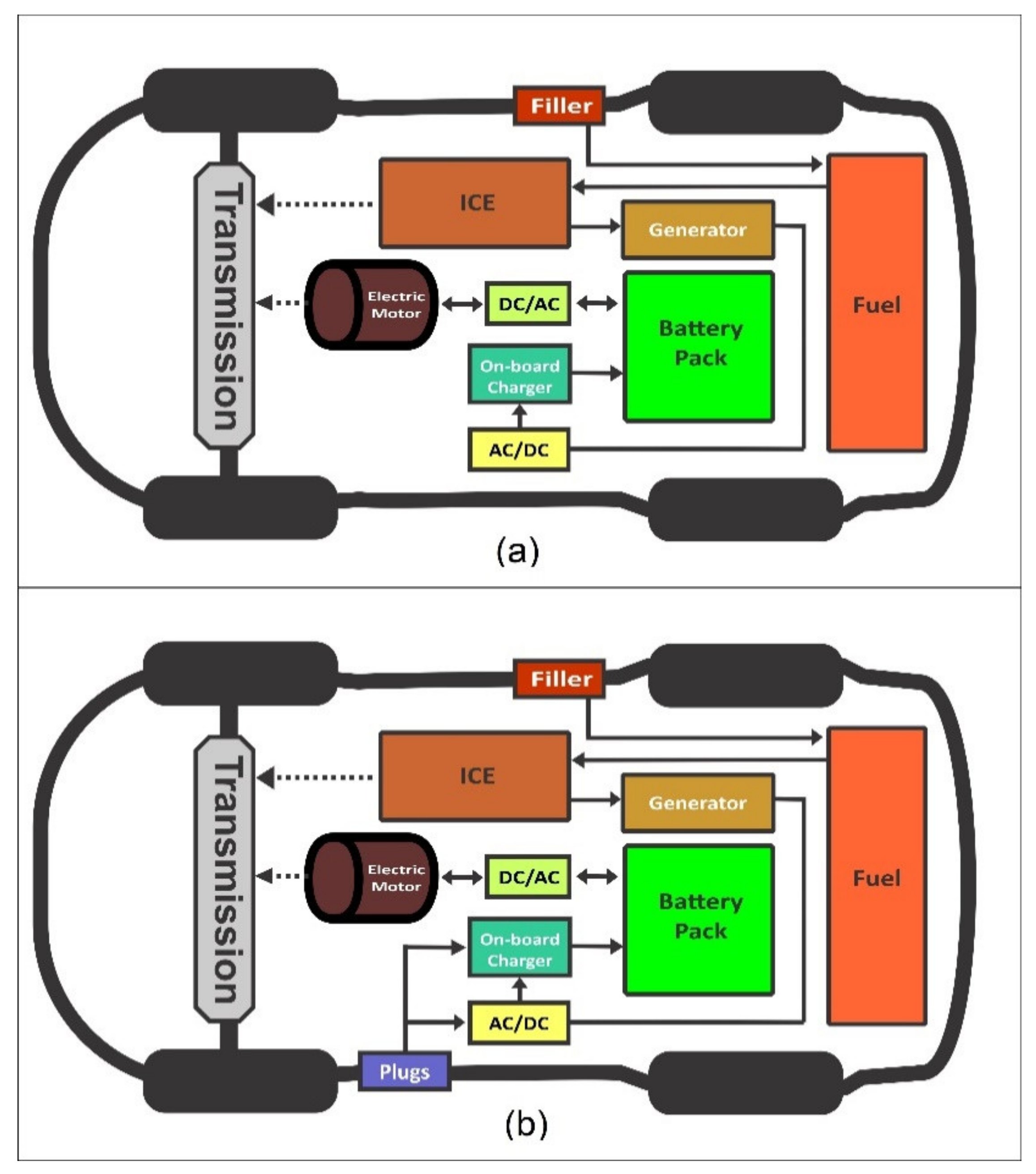
2.3. Plug-In Hybrid Electric Vehicles (PHEVs)
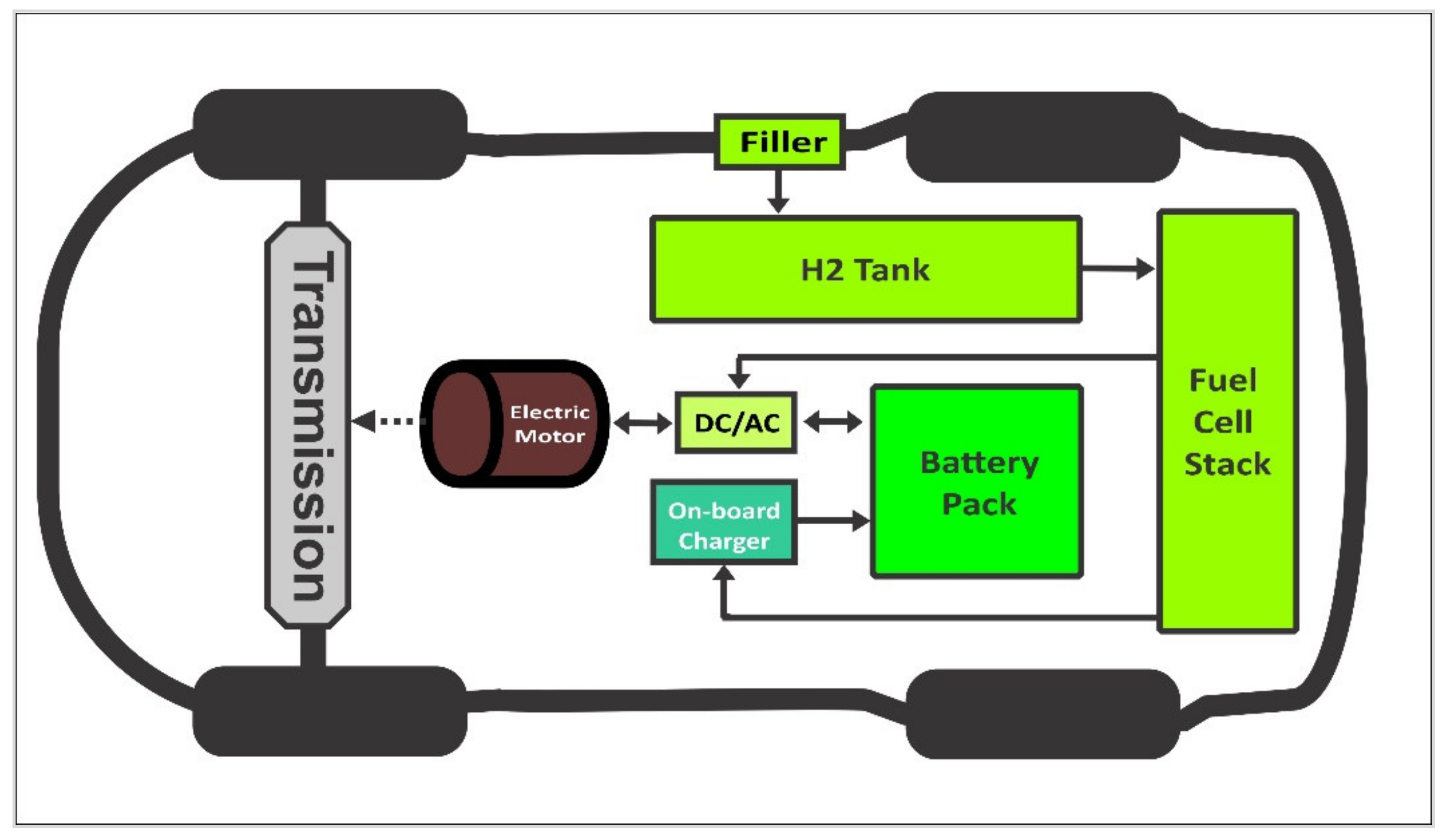
2.4. Fuel Cell Hybrid Electric Vehicles (FCHEVs)
3. Key Component Technologies for EVs
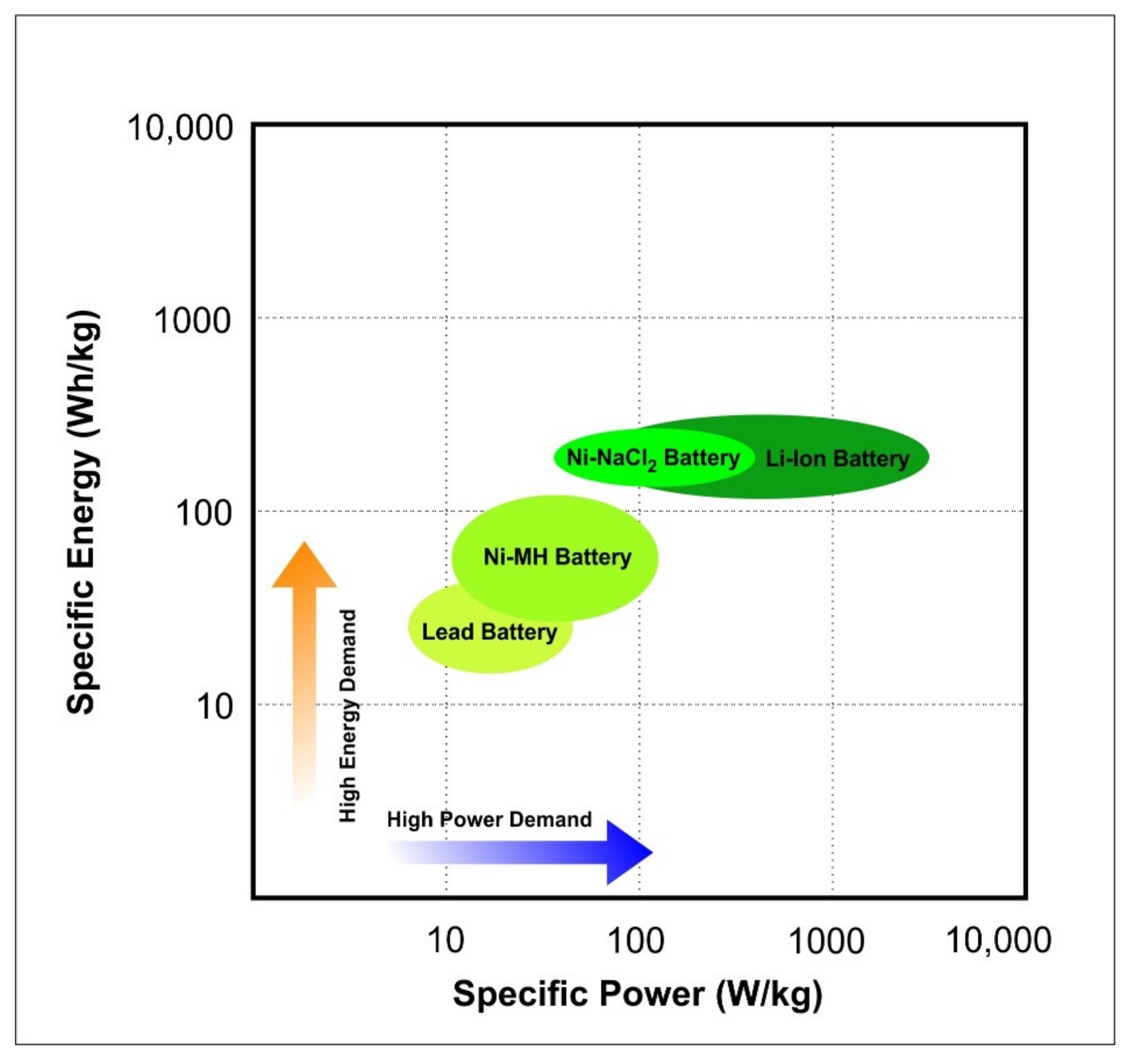
3.1. Battery Technologies
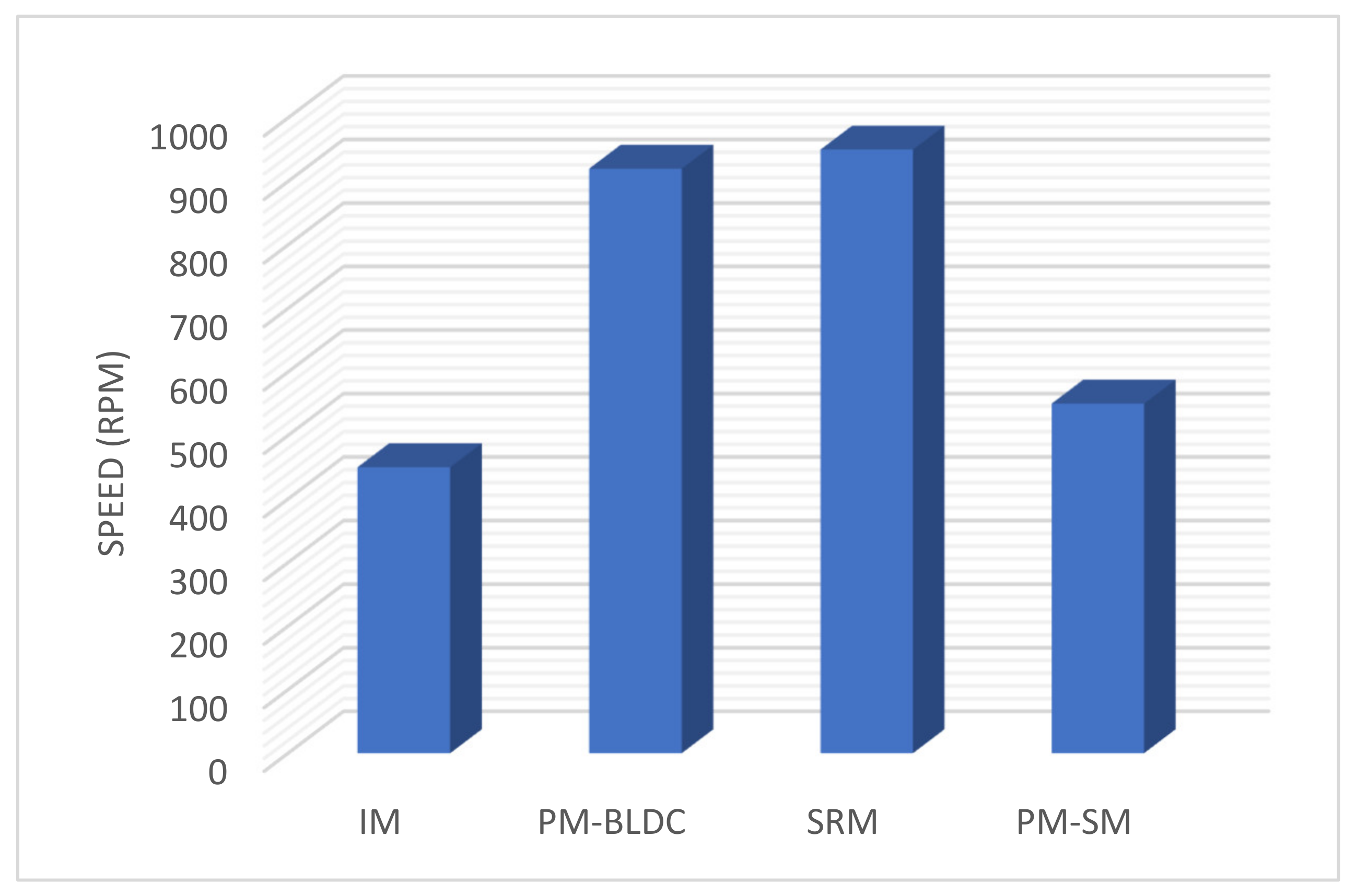
3.2. Electric Motor Technologies
4. Opportunities and Challenges of EVs in the Future
4.1. Future Technology Vehicle
4.2. Charging Time
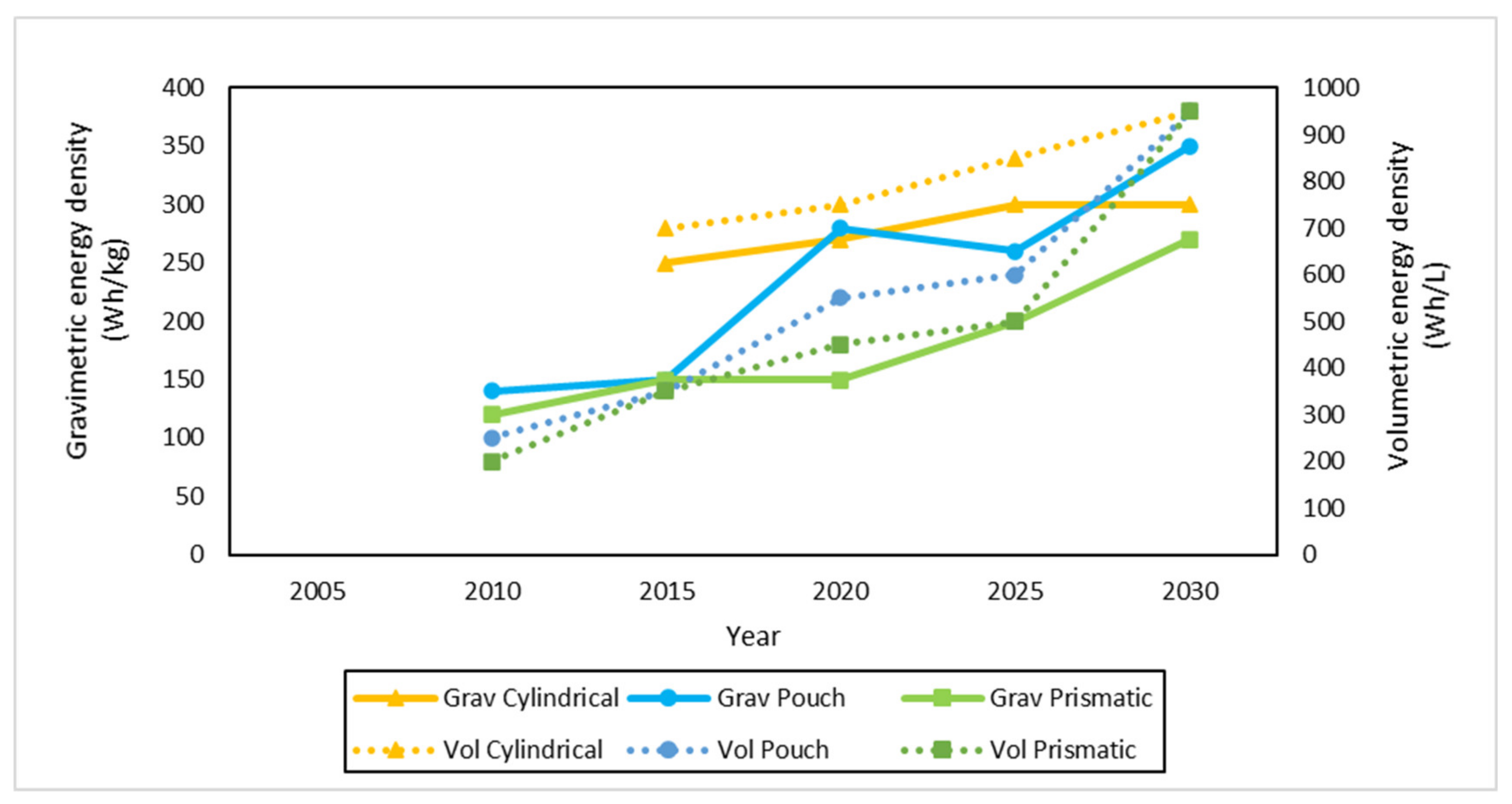
4.3. Battery Performance
4.4. Policy and Regulations
4.5. Open Electricity Market
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BEV | Battery electric vehicle |
| CHAdeMO | Charge de move |
| EMS | Energy management system |
| EV | Electric vehicle |
| FCHEV | Fuel cell hybrid electric vehicle |
| GHG | Greenhouse gas |
| HEV | Hybrid electric vehicle |
| ICE | Internal combustion engine |
| IM | Induction motor |
| LIB | Lithium-ion battery |
| NaNiCl2 | Sodium nickel chloride |
| Ni-Cd | Nickel-cadmium |
| Ni-MH | Nickel-metal hydride |
| PHEV | Plug-in hybrid electric vehicle |
| ZEBRA | Sodium-nickel chloride batteries with zero emissions batteries research activity |
References
- OECD/IEA. Update on Recent Progress in Reform of Inefficient Fossil Fuel Subsidies That Encourage Wasteful Consumption; OECD Publishing: Paris, France, 2019. [Google Scholar]
- IEA. The impacts of the COVID-19 crisis on global energy demand and CO2 emissions; OECD Publishing: Paris, France, 2020. [Google Scholar] [CrossRef]
- Aziz, M.; Oda, T.; Mitani, T.; Watanabe, Y.; Kashiwagi, T. Utilization of electric vehicles and their used batteries for peak-load shifting. Energies 2015, 8, 3720–3738. [Google Scholar] [CrossRef] [Green Version]
- Aziz, M.; Putranto, A.; Biddinika, M.K.; Wijayanta, A.T. Energy-saving combination of N2 production, NH3 synthesis, and power generation. Int. J. Hydrog. Energy 2017, 42, 27174–27183. [Google Scholar] [CrossRef]
- Lund, H.; Ostergaard, P.A.; Connolly, D.; Mathiesen, B.V. Smart energy and smart energy systems. Energy 2017, 137, 556–565. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 22. [Google Scholar] [CrossRef]
- Peplow, L.; Eardley, C. Electric Cars: Calculating the Total Cost of Ownership for Consumers; BEUC: Brussels, Belgium, 2021; Volume 44. [Google Scholar]
- Wróblewski, P.; Drożdż, W.; Lewicki, W.; Miązek, P. Methodology for assessing the impact of aperiodic phenomena on the energy balance of propulsion engines in vehicle electromobility systems for given areas. Energies 2021, 14, 2314. [Google Scholar] [CrossRef]
- Braun, A.; Rid, W. Energy consumption of an electric and an internal combustion passenger car. A comparative case study from real world data on the Erfurt circuit in Germany. Transp. Res. Proc. 2017, 27, 468–475. [Google Scholar] [CrossRef]
- Cheng, Y.H.; Lai, C.M.; Teh, J. Application of particle swarm optimization to design control strategy parameters of parallel hybrid electric vehicle with fuel economy and low emission. In Proceedings of the 2018 International Symposium on Computer, Consumer and Control (IS3C), Taichung, Taiwan, 6–8 December 2018; pp. 342–345. [Google Scholar]
- Zhou, S.; Chen, Z.; Huang, D.; Lin, T. Model Prediction and Rule Based Energy Management Strategy for a Plug-in Hybrid Electric Vehicle with Hybrid Energy Storage System. IEEE Trans. Power Electron. 2021, 36, 5926–5940. [Google Scholar] [CrossRef]
- Lee, H.; Nakasaku, S.; Hirota, T.; Kamiya, Y.; Ihara, Y.; Yamaura, T. Analysis of Energy Consumption and Possibility of Further Reduction of a Fuel Cell Garbage Truck. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Lee, D.Y.; Elgowainy, A.; Dai, Q. Life cycle greenhouse gas emissions of hydrogen fuel production from chlor-alkali processes in the United States. Appl. Energy 2018, 217, 467–479. [Google Scholar] [CrossRef]
- Nagasawa, K.; Davidson, F.T.; Lloyd, A.C.; Webber, M.E. Impacts of renewable hydrogen production from wind energy in electricity markets on potential hydrogen demand for light-duty vehicles. Appl. Energy 2019, 235, 1001–1016. [Google Scholar] [CrossRef]
- Fan, X.; Liu, B.; Liu, J.; Ding, J.; Han, X.; Deng, Y.; Lv, X.; Xie, Y.; Chen, B.; Hu, W.; et al. Battery Technologies for Grid-Level Large-Scale Electrical Energy Storage. Trans. Tianjin Univ. 2020, 26, 92–103. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Oguchi, H.; Toyama, N. A complex hydride lithium superionic conductor for high-energy-density all-solid-state lithium metal batteries. Nat. Commun. 2019, 10, 1081. [Google Scholar] [CrossRef] [Green Version]
- Cox, B.; Bauer, C.; Mendoza Beltran, A.; van Vuuren, D.P.; Mutel, C.L. Life cycle environmental and cost comparison of current and future passenger cars under different energy scenarios. Appl. Energy 2020, 269, 115021. [Google Scholar] [CrossRef]
- Grunditz, E.A.; Thiringer, T. Performance analysis of current BEVs based on a comprehensive review of specifications. IEEE Trans. Transp. Electrif. 2016, 2, 270–289. [Google Scholar] [CrossRef]
- Islameka, M.; Kusuma, C.; Budiman, B. Influence of Braking Strategies for Electric Trike Energy Consumption. Int. J. Sustain. Transp. Technol. 2020, 3, 20–25. [Google Scholar] [CrossRef]
- Hong, J.; Park, S.; Chang, N. Accurate remaining range estimation for electric vehicles. In Proceedings of the 2016 21st Asia and South Pacific Design Automation Conference (ASP-DAC), Macao, China, 25–28 January 2016. [Google Scholar]
- Wachter, C. Electric three-wheelers as an alternative to combustion-engined autorickshaws in Dar es Salaam—Generation of a standard drive cycle, Power Train modeling, and simulation of the energy demand of light electric vehicles. In Proceedings of the Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 10–12 September 2020. [Google Scholar]
- Baek, D. Runtime Power Management of Battery Electric Vehicles for Extended Range with Consideration of Driving Time. IEEE Trans. Very Large Scale Integr. Syst. 2019, 27, 549–559. [Google Scholar] [CrossRef]
- Dovgan, E.; Javorski, M.; Tušar, T.; Gams, M.; Filipič, B. Discovering driving strategies with a multiobjective optimization algorithm. Appl. Soft Comput. J. 2014, 16, 50–62. [Google Scholar] [CrossRef]
- Ozatay, E.; Ozguner, U.; Michelini, J.; Filev, D. Analytical Solution to the Minimum Energy Consumption Based Velocity Profile Optimization Problem with Variable Road Grade; IFAC: New York, NY, USA, 2014; Volume 19, ISBN 9783902823625. [Google Scholar]
- Singh, K.V.; Bansal, H.O.; Singh, D. A comprehensive review on hybrid electric vehicles: Architectures and components. J. Mod. Transp. 2019, 27, 77–107. [Google Scholar] [CrossRef] [Green Version]
- Canbolat, G.; Yaşar, H. Performance Comparison for Series and Parallel Modes of a Hybrid Electric Vehicle. Sak. Univ. J. Sci. 2019, 23, 43–50. [Google Scholar] [CrossRef]
- Li, X.; Williamson, S.S. Comparative investigation of series and parallel Hybrid Electric Vehicle (HEV) efficiencies based on comprehensive parametric analysis. In Proceedings of the 2007 IEEE Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2007; pp. 499–505. [Google Scholar]
- Chung, I. Fuel Economy Improvement Analysis of Hybrid Electric Vehicle. Int. J. Automot. Technol. 2019, 20, 531–537. [Google Scholar] [CrossRef]
- Al-Samari, A. Study of emissions and fuel economy for parallel hybrid versus conventional vehicles on real-world and standard driving cycles. Alex. Eng. J. 2017, 56, 721–726. [Google Scholar] [CrossRef]
- Grün, T.; Doppelbauer, M. Comparative concept study of passive hybrid energy storage systems in 48 v mild hybrid vehicles varying lithium-ion battery and supercapacitor technologies. World Electr. Veh. J. 2019, 10, 71. [Google Scholar] [CrossRef] [Green Version]
- Singh, P.A.; Singh, P.L.; Pundir, A.K.; Saini, A. Mild Hybrid Technology in Automotive: A Review. Int. Res. J. Eng. Technol. 2021, 8, 4405–4410. [Google Scholar]
- Kusuma, C.; Budiman, B.; Nurprasetio, I. Simulation Method for Extended-Range Electric Vehicle Battery State of Charge and Energy Consumption Simulation based on Driving Cycle. In Proceedings of the International Conference on Electric Vehicular Technology (ICEVT), Bali, Indonesia, 18–21 November 2019. [Google Scholar]
- Taherzadeh, E.; Dabbaghjamanesh, M.; Gitizadeh, M.; Rahideh, A. A New Efficient Fuel Optimization in Blended Charge Depletion/Charge Sustenance Control Strategy for Plug-in Hybrid Electric Vehicles. IEEE Trans. Intell. Veh. 2018, 3, 374–383. [Google Scholar] [CrossRef]
- Jar, B.; Watson, N.; Miller, A. Rapid EV Chargers: Implementation of a Charger. In Proceedings of the EEA Conference & Exhibition, Wellington, New Zealand, 22–24 June 2016; pp. 1–17. [Google Scholar]
- Rumale, S.; Al Ashkar, H.; Kerner, T.; Koya, F.; Eitzenberger, M. Design and Implementation of an On-Board Vehicle CHAdeMO Interface for Vehicle-to-Grid Applications. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar]
- Das, S.; Acharjee, P.; Bhattacharya, A. Charging Scheduling of Electric Vehicle incorporating Grid-to-Vehicle (G2V) and Vehicle-to-Grid (V2G) technology in Smart-Grid. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar]
- Xu, L.; Li, Z.; Sun, H.; Fan, J.; Bai, Q.; Ou, Y.; Wang, P.; Deng, B. Study on Control Strategy for Series-Parallel Hybrid Electric Vehicles. J. Phys. Conf. Ser. 2020, 1617, 012059. [Google Scholar] [CrossRef]
- Zhao, H.; Burke, A. Modelling and Analysis of Plug-in Series-Parallel Hybrid Medium-Duty Vehicles. In Proceedings of the European Battery, Hybrid and Fuel Cell Electric Vehicle Congress, Brussels, Belgium, 2–4 December 2015. [Google Scholar]
- Ding, N.; Prasad, K.; Lie, T.T. The Design of Control Strategy for Blended Series-Parallel Power-Split PHEV—A Simulation Study 2 Optimization Design for Series- parallel Power-split PHEV 3 Simulation Study. Int. J. Transp. Syst. 2017, 2, 21–24. [Google Scholar]
- Puma-Benavides, D.S.; Izquierdo-Reyes, J.; Calderon-Najera, J.D.D.; Ramirez-Mendoza, R.A. A systematic review of technologies, control methods, and optimization for extended-range electric vehicles. Appl. Sci. 2021, 11, 7095. [Google Scholar] [CrossRef]
- Liu, Y.; Qiao, J.; Xu, H.; Liu, J.; Chen, Y. Optimal vehicle size and driving condition for extended-range electric vehicles in China: A life cycle perspective. PLoS ONE 2020, 15, e0241967. [Google Scholar] [CrossRef]
- Reksowardojo, I.K.; Arya, R.R.; Budiman, B.A.; Islameka, M.; Santosa, S.P.; Sambegoro, P.L.; Aziz, A.R.A.; Abidin, E.Z.Z. Energy management system design for good delivery electric trike equipped with different powertrain configurations. World Electr. Veh. J. 2020, 11, 76. [Google Scholar] [CrossRef]
- Camacho, O.M.F.; Mihet Popa, L. Fast Charging and Smart Charging Tests for Electric Vehicles Batteries using Renewable Energy. Oil Gas Sci Technol. 2016, 71, 13–25. [Google Scholar] [CrossRef] [Green Version]
- Park, S.; Nam, S.; Oh, M.; Choi, I.J.; Shin, J. Preference structure on the design of hydrogen refueling stations to activate energy transition. Energies 2020, 13, 3959. [Google Scholar] [CrossRef]
- Fathabadi, H. Fuel cell hybrid electric vehicle (FCHEV): Novel fuel cell/SC hybrid power generation system. Energy Convers. Manag. J. 2018, 156, 192–201. [Google Scholar] [CrossRef]
- Hu, X.; Murgovski, N.; Johannesson, L.M.; Egardt, B. Optimal dimensioning and power management of a fuel cell/battery hybrid bus via convex programming. IEEE/ASME Trans. Mechatron. 2015, 20, 457–468. [Google Scholar] [CrossRef]
- El Fadil, H.; Giri, F.; Guerrero, J.M.; Tahri, A. Modeling and nonlinear control of a fuel cell/supercapacitor hybrid energy storage system for electric vehicles. IEEE Trans. Veh. Technol. 2014, 63, 3011–3018. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Yang, H.; Han, Y.; Li, M.; Chen, W. A state machine strategy based on droop control for an energy management system of PEMFC-battery-supercapacitor hybrid tramway. Int. J. Hydrog. Energy 2016, 41, 16148–16159. [Google Scholar] [CrossRef]
- Halimah, P.; Rahardian, S.; Budiman, B. Battery Cells for Electric Vehicles. Int. J. Sustain. Transp. Technol. 2019, 2, 54–57. [Google Scholar] [CrossRef] [Green Version]
- Sharma, S.; Panwar, A.K.; Tripathi, M.M. Storage technologies for electric vehicles. J. Traffic Transp. Eng. Engl. Ed. 2020, 7, 340–361. [Google Scholar] [CrossRef]
- May, G.; Davidson, A.; Monahov, B. Lead batteries for utility energy storage: A review. J. Energy Storage 2018, 15, 145–157. [Google Scholar] [CrossRef]
- Liang, Y.; Zhao, C.; Yuan, H.; Chen, Y.; Zhang, W.; Huang, J.; Yu, D.; Liu, Y.; Titirici, M.; Chueh, Y.; et al. A review of rechargeable batteries for portable electronic devices. InfoMat 2019, 1, 6–32. [Google Scholar] [CrossRef] [Green Version]
- Koehler, U. General Overview of Non-Lithium Battery Systems and Their Safety Issues; Elsevier B.V.: Amsterdam, The Netherlands, 2018; ISBN 9780444637772. [Google Scholar]
- Qazi, S. Fundamentals of Standalone Photovoltaic Systems; Elsevier: Amsterdam, The Netherlands, 2017; ISBN 9780128030226. [Google Scholar]
- Chen, W.; Jin, Y.; Zhao, J.; Liu, N.; Cui, Y. Nickel-hydrogen batteries for large-scale energy storage. Proc. Natl. Acad. Sci. USA 2018, 115, 11694–11699. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Lu, X.; Kim, J.Y.; Meinhardt, K.D.; Chang, H.J.; Canfield, N.L.; Sprenkle, V.L. Advanced intermediate temperature sodium-nickel chloride batteries with ultra-high energy density. Nat. Commun. 2016, 7, 1–6. [Google Scholar] [CrossRef]
- Benato, R.; Cosciani, N.; Crugnola, G.; Sessa, S.D.; Lodi, G.; Parmeggiani, C.; Todeschini, M. Sodium nickel chloride battery technology for large-scale stationary storage in the high voltage network. J. Power Sources 2015, 293, 127–136. [Google Scholar] [CrossRef]
- Juangsa, F.; Budiman, B.; Sambegoro, P.; Darmanto, P.; Nozaki, T. Synthesis of Nanostructured Silicon Nanoparticles for Anodes of Li-Ion Battery. In Proceedings of the International Conference on Electric Vehicular Technology (ICEVT), Bali, Indonesia, 18–21 November 2019. [Google Scholar]
- Schuster, S.; Brand, J.; Berg, P.; Gleissenberger, M.; Jossen, A. Lithium-ion cell to cell variation during battery electric vehicle operation. J. Power Sources 2015, 297, 242–251. [Google Scholar] [CrossRef]
- Amiribavandpour, P.; Shen, W.; Kapoor, A. An improved theoretical electrochemical thermal modeling of lithium-ion battery packs in electric vehicles. J. Power Sources 2015, 284, 328–338. [Google Scholar] [CrossRef]
- Rahardian, S.; Budiman, B.; Sambegoro, P.; Nurprasetio, I. Review of Solid-State Battery Technology Progress. In Proceedings of the International Conference on Electric Vehicular Technology (ICEVT), Bali, Indonesia, 18–21 November 2019. [Google Scholar]
- Tie, S.; Tan, C. A review of energy sources and energy management system in electric vehicles 2013, 20. Renew. Sustain. Energy Rev. 2013, 20, 82–102. [Google Scholar] [CrossRef]
- Rahman, M.; Wang, X.; Wen, C. A review of high energy density lithium-air battery technology. J. Appl. Electrochem. 2014, 44, 5–22. [Google Scholar] [CrossRef]
- Chang, C. Factors Affecting Capacity Design of Lithium-Ion. MDPI, Basel, Switz. 2019. Batteries 2019, 5, 58. [Google Scholar]
- Liu, Y.; Gene Liao, Y.; Lai, M.C. Lithium-ion polymer battery for 12-voltage applications: Experiment, modelling, and validation. Energies 2020, 13, 638. [Google Scholar] [CrossRef] [Green Version]
- Mongird, K.; Viswanathan, V.; Balducci, P.; Alam, J.; Fotedar, V.; Koritarov, V.; Hadjerioua, B. Energy Storage Technology and Cost Characterization Report|Department of Energy; Pacific Northwest National Lab. (PNNL): Richland, WA, USA, 2019. [Google Scholar]
- Review of Battery Techonologies for Automotive Applications; ACEA: Brussels, Belgium, 2014.
- Sharma, A.; Sharma, S. Review of power electronics in vehicle-to-grid systems. J. Energy Storage 2019, 21, 337–361. [Google Scholar] [CrossRef]
- Zang, X.; Shen, C.; Sanghadasa, M.; Lin, L. High-Voltage Supercapacitors Based on Aqueous Electrolytes. ChemElectroChem 2019, 6, 976–988. [Google Scholar] [CrossRef]
- Afif, A.; Rahman, S.M.H.; Tasfiah Azad, A.; Zaini, J.; Islan, M.A.; Azad, A.K. Advanced materials and technologies for hybrid supercapacitors for energy storage—A review. J. Energy Storage 2019, 25, 100852. [Google Scholar] [CrossRef]
- Kate, R.S.; Khalate, S.A.; Deokate, R.J. Overview of nanostructured metal oxides and pure nickel oxide (NiO) electrodes for supercapacitors: A review. J. Alloy. Compd. 2018, 734, 89–111. [Google Scholar] [CrossRef]
- Zhang, Q.; Deng, W.; Zhang, S.; Wu, J. A Rule Based Energy Management System of Experimental Battery/Supercapacitor Hybrid Energy Storage System for Electric Vehicles. J. Control Sci. Eng. 2016, 2016, 6828269. [Google Scholar] [CrossRef] [Green Version]
- Lü, X.; Qu, Y.; Wang, Y.; Qin, C.; Liu, G. A comprehensive review on hybrid power system for PEMFC-HEV: Issues and strategies. Energy Convers. Manag. 2018, 171, 1273–1291. [Google Scholar] [CrossRef]
- Li, T.; Liu, H.; Zhao, D.; Wang, L. Design and analysis of a fuel cell supercapacitor hybrid construction vehicle. Int. J. Hydrog. Energy 2016, 41, 12307–12319. [Google Scholar] [CrossRef]
- Balali, Y.; Stegen, S. Review of energy storage systems for vehicles based on technology, environmental impacts, and costs. Renew. Sustain. Energy Rev. 2021, 135, 110185. [Google Scholar] [CrossRef]
- Cheng, M.; Sun, L.; Buja, G.; Song, L. Advanced electrical machines and machine-based systems for electric and hybrid vehicles. Energies 2015, 8, 9541–9564. [Google Scholar] [CrossRef] [Green Version]
- Eldho Aliasand, A.; Josh, F.T. Selection of Motor foran Electric Vehicle: A Review. Mater. Today Proc. 2020, 24, 1804–1815. [Google Scholar] [CrossRef]
- López, I.; Ibarra, E.; Matallana, A.; Andreu, J.; Kortabarria, I. Next generation electric drives for HEV/EV propulsion systems: Technology, trends and challenges. Renew. Sustain. Energy Rev. 2019, 114, 109336. [Google Scholar] [CrossRef]
- Finken, T.; Felden, M.; Hameyer, K. Comparison and design of different electrical machine types regarding their applicability in hybrid electrical vehicles. In Proceedings of the 2008 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–5. [Google Scholar]
- Bharadwaj, N.V.; Chandrasekhar, P.; Sivakumar, M. Induction motor design analysis for electric vehicle application. AIP Conf. Proc. 2020, 2269, 10–14. [Google Scholar]
- Mahmoudi, A.; Soong, W.L.; Pellegrino, G.; Armando, E. Efficiency maps of electrical machines. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 2791–2799. [Google Scholar]
- Lumyong, P.; Sarikprueck, P. A Study on Induction Motor Efficiency Improvement for Implementing in Electric Vehicle. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea, 7–10 October 2018; pp. 616–619. [Google Scholar]
- Loganayaki, A.; Bharani Kumar, R. Permanent Magnet Synchronous Motor for Electric Vehicle Applications. In Proceedings of the 2019 5th International Conference on Advanced Computing & Communication Systems (ICACCS), Coimbatore, India, 15–16 March 2019; pp. 1064–1069. [Google Scholar]
- Chiba, A.; Kiyota, K. Review of research and development of switched reluctance motor for hybrid electrical vehicle. In Proceedings of the 2015 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Turin, Italy, 26–27 March 2015; pp. 127–131. [Google Scholar]
- Guo, Q.; Zhang, C.; Li, L.; Zhang, J.; Wang, M. Maximum Efficiency Control of Permanent-Magnet Synchronous Machines for Electric Vehicles. Energy Proc. 2017, 105, 2267–2272. [Google Scholar] [CrossRef]
- Wang, W.; Fu, R.; Fan, Y. Electromagnetic Parameters Matching of Permanent Magnet Synchronous Motor for Hybrid Electric Vehicles. IFAC-PapersOnLine 2018, 51, 407–414. [Google Scholar] [CrossRef]
- Karki, A.; Phuyal, S.; Tuladhar, D.; Basnet, S.; Shrestha, B.P. Status of pure electric vehicle power train technology and future prospects. Appl. Syst. Innov. 2020, 3, 35. [Google Scholar] [CrossRef]
- Thakar, D.U.; Patel, R.A. Comparison of Advance and Conventional Motors for Electric Vehicle Application. In Proceedings of the 2019 3rd International Conference on Recent Developments in Control, Automation & Power Engineering (RDCAPE), Noida, India, 10–11 October 2019; pp. 137–142. [Google Scholar]
- Sharifan, S.; Ebrahimi, S.; Oraee, A.; Oraee, H. Performance comparison between brushless PM and induction motors for hybrid electric vehicle applications. In Proceedings of the 2015 Intl Aegean Conference on Electrical Machines & Power Electronics (ACEMP), 2015 Intl Conference on Optimization of Electrical & Electronic Equipment (OPTIM) & 2015 Intl Symposium on Advanced Electromechanical Motion Systems (ELECTROMOTION), Side, Turkey, 2–4 September 2015; pp. 719–724. [Google Scholar]
- Gan, C.; Wu, J.; Hu, Y.; Yang, S.; Cao, W.; Guerrero, J.M. New Integrated Multilevel Converter for Switched Reluctance Motor Drives in Plug-in Hybrid Electric Vehicles with Flexible Energy Conversion. IEEE Trans. Power Electron. 2017, 32, 3754–3766. [Google Scholar] [CrossRef] [Green Version]
- Kumar, R.; Saxena, R. Simulation and Analysis of Switched Reluctance Motor Drives for Electric Vehicle Applications using MATLAB. In Proceedings of the 2019 4th International Conference on Electrical, Electronics, Communication, Computer Technologies and Optimization Techniques (ICEECCOT), Mysuru, India, 13–14 December 2019; pp. 23–28. [Google Scholar]
- Chang, H.C.; Jheng, Y.M.; Kuo, C.C.; Hsueh, Y.M. Induction motors condition monitoring system with fault diagnosis using a hybrid approach. Energies 2019, 12, 1471. [Google Scholar] [CrossRef] [Green Version]
- Ganesan, S.; David, P.W.; Balachandran, P.K.; Samithas, D. Intelligent Starting Current-Based Fault Identification of an Induction Motor Operating under Various Power Quality Issues. Energies 2021, 14, 304. [Google Scholar] [CrossRef]
- Pindoriya, R.M.; Rajpurohit, B.S.; Kumar, R.; Srivastava, K.N. Comparative analysis of permanent magnet motors and switched reluctance motors capabilities for electric and hybrid electric vehicles. In Proceedings of the 2018 IEEMA Engineer Infinite Conference (eTechNxT), New Delhi, India, 13–14 March 2018; pp. 1–5. [Google Scholar]
- Rahman, M.S.; Lukman, G.F.; Hieu, P.T.; Jeong, K.-I.; Ahn, J.-W. Optimization and Characteristics Analysis of High Torque Density 12/8 Switched Reluctance Motor Using Metaheuristic Gray Wolf Optimization Algorithm. Energies 2021, 14, 2013. [Google Scholar] [CrossRef]
- Ronanki, D.; Kelkar, A.; Williamson, S.S. Extreme fast charging technology—Prospects to enhance sustainable electric transportation. Energies 2019, 12, 3721. [Google Scholar] [CrossRef] [Green Version]
- IEA. Global E V Outlook. Towards Cross-Modal Electrification; International Energy Agency: Paris, France, 2018. [Google Scholar]
- Faizal, M.; Feng, S.; Zureel, M.; Sinidol, B.; Wong, D.; Jian, K. A review on challenges and opportunities of electric vehicles (evs). J. Mech. Eng. Res. Dev. JMERD 2019, 42, 130–137. [Google Scholar] [CrossRef]
- Suarez, C.; Martinez, W. Fast and Ultra-Fast Charging for Battery Electric Vehicles—A Review. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 569–575. [Google Scholar]
- Mansour, M.B.M.; Said, A.; Ahmed, N.E.; Sallam, S. Autonomous parallel car parking. In Proceedings of the 2020 Fourth World Conference on Smart Trends in Systems, Security and Sustainability (WorldS4), London, UK, 27–28 July 2020; pp. 392–397. [Google Scholar]
- Wang, Y.; Sun, W.; Lu, Y. Research on application in intelligent vehicle automatic control system. J. Phys. Conf. Ser. 2021, 1828, 012046. [Google Scholar] [CrossRef]
- Noh, B.; Park, H.; Yeo, H. Analyzing vehicle-pedestrian interactions: Combining data cube structure and predictive collision risk estimation mode. Accid. Anal. Prev. 2021, 152, 105970. [Google Scholar]
- Elma, O.; Adham, M.I.; Gabbar, H.A. Effects of Ultra-Fast Charging System for Battery Size of Public Electric Bus. In Proceedings of the IEEE 8th International Conference on Smart Energy Grid Engineering (SEGE), Oshawa, ON, Canada, 12–14 August 2020. [Google Scholar]
- Brenna, M.; Foiadelli, F.; Leone, C.; Longo, M. Electric Vehicles Charging Technology Review and Optimal Size Estimation. J. Electr. Eng. Technol. 2020, 15, 2539–2552. [Google Scholar] [CrossRef]
- Das, H.S.; Rahman, M.M.; Li, S.; Tan, C.W. Electric vehicles standards, charging infrastructure, and impact on grid integration: A technological review. Renew. Sustain. Energy Rev. 2020, 120, 109618. [Google Scholar] [CrossRef]
- Sun, X.; Li, Z.; Wang, X.; Li, C. Technology development of electric vehicles: A review. Energies 2019, 13, 90. [Google Scholar] [CrossRef] [Green Version]
- Huda, M.; Tokimatsu, K.; Aziz, M. Techno economic analysis of vehicle to grid (V2G) integration as distributed energy resources in Indonesia power system. Energies 2020, 13, 1162. [Google Scholar] [CrossRef] [Green Version]
- Aziz, M.; Budiman, B.A. Extended utilization of electric vehicles in electrical grid services. In Proceedings of the 2017 4th International Conference on Electric Vehicular Technology (ICEVT), Bali, Indonesia, 2–5 October 2017; pp. 1–6. [Google Scholar]
- Kriukov, A.; Gavrilas, M. Energy/Cost efficiency study on V2G operating mode for EVs and PREVs. In Proceedings of the 2019 8th International Conference on Modern Power Systems (MPS), Cluj, Romania, 21–23 May 2019. [Google Scholar]
- Małek, A.; Caban, J.; Wojciechowski, Ł. Charging electric cars as a way to increase the use of energy produced from RES. Open Eng. 2020, 10, 98–104. [Google Scholar] [CrossRef] [Green Version]
- Aziz, M.; Oda, T.; Ito, M. Battery-assisted charging system for simultaneous charging of electric vehicles. Energy 2016, 100, 82–90. [Google Scholar] [CrossRef]
- Kurtz, J.; Bradley, T.; Winkler, E.; Gearhart, C. Predicting demand for hydrogen station fueling. Int. J. Hydrog. Energy 2020, 45, 32298–32310. [Google Scholar] [CrossRef]
- Wang, D.; Muratori, M.; Eichman, J.; Wei, M.; Saxena, S.; Zhang, C. Quantifying the flexibility of hydrogen production systems to support large-scale renewable energy integration. J. Power Sources 2018, 399, 383–391. [Google Scholar] [CrossRef]
- Huang, X.; Li, Y.; Meng, J.; Sui, X.; Teodorescu, R.; Stroe, I. The Effect of Pulsed Current on the Performance of Lithium-ion Batteries. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 5633–5640. [Google Scholar]
- Biao, J.; Fangfang, L.; Zhiwen, A.; Zhiqiang, X.; Bin, J. Thermal Simulation of Power Lithium-ion Battery under Low Temperature and Preheating Condition. In Proceedings of the 2020 5th International Conference on Smart Grid and Electrical Automation (ICSGEA), Zhangjiajie, China, 13–14 June 2020; pp. 51–54. [Google Scholar]
- Deng, J.; Bae, C.; Denlinger, A.; Miller, T. Electric Vehicles Batteries: Requirements and Challenges. Joule 2020, 4, 511–515. [Google Scholar] [CrossRef]
- König, A.; Nicoletti, L.; Schröder, D.; Wolff, S.; Waclaw, A.; Lienkamp, M. An overview of parameter and cost for battery electric vehicles. World Electr. Veh. J. 2021, 12, 1–29. [Google Scholar]
- Hardman, S.; Chandan, A.; Tal, G.; Turrentine, T. The effectiveness of financial purchase incentives for battery electric vehicles—A review of the evidence. Renew. Sustain. Energy Rev. 2017, 80, 1100–1111. [Google Scholar] [CrossRef]
- Lévay, P.Z.; Drossinos, Y.; Thiel, C. The effect of fiscal incentives on market penetration of electric vehicles: A pairwise comparison of total cost of ownership. Energy Policy 2017, 105, 524–533. [Google Scholar] [CrossRef]
- Curtin, J.; McInerney, C.; Ó Gallachóir, B. Financial incentives to mobilise local citizens as investors in low-carbon technologies: A systematic literature review. Renew. Sustain. Energy Rev. 2017, 75, 534–547. [Google Scholar] [CrossRef]
- Automotive Dialogue. The Impact of Government Policy on Promoting New Energy Vehicles (NEVs): The Evidence in APEC Economies; APEC: Singapore, 2017. [Google Scholar]
- Brückmann, G.; Bernauer, T. What drives public support for policies to enhance electric vehicle adoption? Environ. Res. Lett. 2020, 15, 094002. [Google Scholar] [CrossRef]
- Abuelrub, A.; Al Khalayleh, A.R.; Allabadi, A. Optimal operation of electric vehicle charging station in an open electricity market. Int. J. Smart Grid Clean Energy 2019, 8, 495–499. [Google Scholar] [CrossRef]
- Yan, Q.; Zhang, B.; Kezunovic, M. Optimized operational cost reduction for an EV charging station integrated with battery energy storage and PV generation. IEEE Trans. Smart Grid 2019, 10, 2096–2106. [Google Scholar] [CrossRef]
- Huang, Z.; Li, Z.; Lai, C.S.; Zhao, Z.; Wu, X.; Li, X.; Tong, N.; Lai, L.L. A novel power market mechanism based on blockchain for electric vehicle charging stations. Electron 2021, 10, 307. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Lead-Acid Battery | Ni-MH Battery | Na-NiCl2 Battery | LIBs | References |
|---|---|---|---|---|---|
| Gravimetric energy density (Wh/kg) | 30–50 | 40–110 | 150 | 118–250 | [54,62] |
| Volumetric energy density (Wh/L) | 100 | 180–220 | 160 | 200–400 | [62,63] |
| Nominal voltage (V) | 2 | 1.2 | 2.4 | 3.6 | [64,65,66] |
| Lifecycle | 500–1000 | <3000 | >1200 | 2000 | [62,67,68] |
| Energy efficiency (%) | >80 | 70 | 80 | >95 | [62,67] |
| Cost (USD/kWh) | 100 | 853–1700 | 482–1000 | 700 | [62,66] |
| Parameters | IM | PM-SM | PM-BLDC | SRM |
|---|---|---|---|---|
| Efficiency | +++ | ++++ | +++++ | ++++ |
| Power density | +++ | ++++ | ++++ | ++ |
| Size | +++ | +++ | +++ | +++ |
| Acoustic noise | + | + | + | ++ |
| Torque ripple | + | + | + | +++++ |
| Fault-tolerant | ++ | ++ | +++ | ++++ |
| Simple construction | ++ | ++ | +++ | +++++ |
| Reliability | ++++ | +++ | +++ | ++++ |
| Technological maturity | +++++ | ++++ | ++++ | ++++ |
| Cost | +++ | +++++ | +++++ | ++++ |
| Opportunity | Real market penetration in the automotive industry | As the preferred option in current EVs and HEVs | High possibility to be used for initial choice for driving EVs | Gaining intensive attraction from the scientific and industrial community |
| Challenge | A new technology control for reducing fault tolerance and slip | Accurate continuous position feedback for the torque ripple | Requirement of external transmission systems, e.g., fixed gear and chain drives | The identification of current switching angle for non-linear control |
| References | [79,88,92,93] | [79,88,94] | [78,79,88] | [79,88,94,95] |
| Vehicle Model | Type | Battery Capacity (kWh) | Motor Drive | Motor Rating (kW) | Electric Range (km) | Year | References |
|---|---|---|---|---|---|---|---|
| Audi A3 e-Tron | PHEV | 95 | PM-SM | 75 | 50 | 2018 | [96,99] |
| Audi Q5 | HEV | 10 | PM-SM | 182 | - | 2009 | [78] |
| BMW i3 | BEV | 33 | PM-SM | 125 | 180 | 2011 | [87,96] |
| BMW i8 | HEV | 82 | PM-SM | 265 | - | 2014 | [78] |
| BYD e6 | BEV | 82 | PM-SM | 90 | - | 2016 | [6,78] |
| Cadillac CT6 | PHEV | 18.4 | PM-SM | 250 | 50 | - | [96] |
| Chery eQ | BEV | 23.6 | PM-SM | 41 | 250 | - | [87,96] |
| Chevy Bolt | BEV | 60 | PM-SM | 150 | 380 | 2019 | [87,98,99] |
| Chevy Volt | PHEV | 18.4 | PM-SM | 87 | 675 | 2018 | [6,96] |
| Citröen E-Mhari | BEV | - | PM-SM | 50 | - | 2016 | [78] |
| Ford Focus Electric | BEV | 33.5 | PM-SM | 107 | 185 | 2017 | [87,96] |
| General Motor EV | - | 26.4 | - | - | - | 2000 | [6] |
| GM prototype | BEV | - | SRM | - | - | 1990 | [87] |
| Honda Clarity | - | 25.5 | - | 100 | - | 2017 | [6] |
| Hyundai Ioniq and Kona | BEV, HEV, P-HEV | 28 | PM-SM | 88 | 200 | 2018–2021 | [6,98,99] |
| Kia Soul EV | BEV, P-HEV | 30 | PM-SM | 81 | 180 | 2016 | [98,99] |
| Mahindra Reva | BEV | 16 | IM | 35 | 120 | - | [96] |
| Mercedes Clase B ED | BEV | 28 | PM-SM | 132 | - | 2015 | [6,78] |
| Mercedes SLS AMG ED | BEV | - | PM-SM | 550 | - | 2014 | [78] |
| Mitsubishi i-MiEV | BEV | - | PM-SM | 132 | - | 2011 | [78,87] |
| NIO EP9 | - | 90 | PM-SM | 1000 | 430 | - | [6,96] |
| Nissan LEAF | BEV | 40 | PM-SM | 110 | 240 | 2009 | [87,98,99] |
| Renault Zoe | BEV | 41 | PM-SM | 80 | 400 | 2012 | [87,96] |
| Skoda Favorit | - | 10 | - | - | - | 1988 | [6] |
| Smart FortoWo ED | BEV | 17.6 | PM-BLDC | 55 | 90 | 2009 | [6,87,96] |
| Tazzari Zero Classic | BEV | - | IM | 20 | - | 2009 | [78] |
| Tesla Model 3 | BEV | 75 | PM-SM | 192 | 350 | 2016 | [87,96] |
| Tesla Model S 70D | BEV | 100 | IM | 100 | 380 | 2018 | [87,98,99] |
| Tesla Model X | BEV | 100 | IM | 193 | 520 | 2016 | [87,98,99] |
| Tesla Roadster | BEV | 80 | IM | 185 | - | 2014 | [6,78] |
| Toyota Prius | PHEV | 8.8 | PM-SM | 50 | 60 | 2018 | [96] |
| Volvo C30 | - | 24 | - | - | - | 2010 | [6] |
| Volvo V70 | PHEV | 11.3 | - | - | - | 2010 | [6] |
| VW e-Golf | BEV | 35.8 | IM | 100 | 200 | 2017 | [96] |
| Charging Level [104] | Charger Location [105] | Voltage Level (V) [98,99] | Maximum Power (kW) [96] | Charging Time (h) [96] | Standard [96] | Cost (USD) [106] | |||
|---|---|---|---|---|---|---|---|---|---|
| China | Europe | Japan | North America | ||||||
| Level 1 (Slow) | On-board | 120 AC | 3.7 | 10–15 | Private outlets (not specific for EVSE) | SAE J1772 (Type 1) | 500–880 | ||
| Level 2 (Slow) | On-board | 220 AC | 3.7–22 | 3.5–7 | GB/T 20234 (AC) | IEC 62196 (Type 2) | SAE J1772 (Type 1) | SAE J1772 (Type 1) | 75 |
| Level 3 (Fast) | On-board | 3-φ 480 AC | 22–43.5 | 0.16–0.5 | GB/T 20234 (AC) | IEC 62196 (Type 2) | SAE J3068 | 76 - | |
| Off-board | 200–600 DC | <200 | GB/T 20234 (DC) | CCS Combo 2 | CHAdeMO | CCS Combo 1 | |||
| <150 | Tesla and CHAdeMO | ||||||||
| Extra Fast | Off-board | >800 DC | >400 | ~gas refueling | CCS/CHAdeMO | - | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wahid, M.R.; Budiman, B.A.; Joelianto, E.; Aziz, M. A Review on Drive Train Technologies for Passenger Electric Vehicles. Energies 2021, 14, 6742. https://doi.org/10.3390/en14206742
Wahid MR, Budiman BA, Joelianto E, Aziz M. A Review on Drive Train Technologies for Passenger Electric Vehicles. Energies. 2021; 14(20):6742. https://doi.org/10.3390/en14206742
Chicago/Turabian StyleWahid, Muhammad Rizalul, Bentang Arief Budiman, Endra Joelianto, and Muhammad Aziz. 2021. "A Review on Drive Train Technologies for Passenger Electric Vehicles" Energies 14, no. 20: 6742. https://doi.org/10.3390/en14206742
APA StyleWahid, M. R., Budiman, B. A., Joelianto, E., & Aziz, M. (2021). A Review on Drive Train Technologies for Passenger Electric Vehicles. Energies, 14(20), 6742. https://doi.org/10.3390/en14206742